Abstract
Optimizing traffic signal timing can effectively alleviate urban traffic congestion. However, most of the existing signal timing methods struggle to deal with conflicting traffic flows in heavy traffic; therefore, more effective methods are urgently required. In this paper, we propose a flexible signal timing method that combines all-red control and adaptive timing (FMAA) to deal with conflicting traffic flows at an isolated intersection. First, we consider a Vehicle-to-Infrastructure (V2I) communication-based vehicular network environment, in which fine-grained traffic information can be collected by Road Side Units (RSUs) and uploaded to a cloud server for designing signal timing methods. Second, the congestion degree of Conflict Area (CA) is defined and utilized to trigger all-red control in congested cases. Third, the tolerance degree of the Waiting Area (WA) is defined and utilized to perform adaptive timing in other cases. Finally, simulations were conducted using SUMO, and the proposed FMAA method performed better than the comparative methods in terms of average speed, waiting time, and congested vehicles, thus improving traffic efficiency at an isolated intersection with conflicting traffic flows.
1. Introduction
With the rapid development of transportation, traffic congestion has become an urgent problem in urban environments. The traffic signal control system utilized in transportation systems provides a cost-effective way, and the optimization of traffic signal timing helps ease traffic congestion [1,2].
The key challenge in designing an efficient signal timing method is how to collect real-time traffic information precisely; Vehicle-to-Everything (V2X) communication-based collecting methods are considered better than other traditional methods (i.e., vision-based [3,4] and sensor-based [5,6] methods) because they are able to collect real-time and fine-grained traffic information (e.g., vehicle ID, type, etc.) and are not sensitive to harsh environments [7]. For example, based on Vehicle-to-Vehicle (V2V) communications, Bazzi et al. proposed a novel virtual traffic light algorithm to define the priorities of intersections [8], and Tiaprasert et al. presented a mathematical model for real-time queue estimation [9].
By designing and applying effective signal timing methods, vehicles from different directions can make full use of limited road resources at intersections. However, some vehicles may be blocked at intersections because of conflicting traffic flows in heavy traffic, which eventually causes severe congestion. Moreover, any adaptive timing method is invalid in such situations. Fortunately, a special signal control is considered, namely, all-red control. It helps to evacuate blocked vehicles and improve traffic efficiency at intersections. For instance, Kwon et al. adopted the all-red control and dynamically adjusted the length of all-red time based on a deep neural network and a multi-level regression model, which effectively improved traffic safety and efficiency at intersections [10].
In this study, we designed a flexible signal timing method that combines all-red control and adaptive timing (FMAA) to improve traffic efficiency at an isolated intersection with conflicting traffic flows. Our main contributions are as follows:
- To deal with the severe congestion caused by conflicting traffic flows, we consider an all-red signal control method based on the congestion degree of the Conflict Area (CA). This can effectively evacuate blocked vehicles and ease traffic congestion at intersections;
- To improve the traffic efficiency in other cases, we designed an adaptive signal timing method based on the tolerance degree of the Waiting Area (WA). It considers both the subjective waiting time of vehicles and the objective traffic density and helps to allocate appropriate green time for each signal phase;
- The proposed FMAA method perfectly combines all-red control and adaptive timing to deal with complicated traffic environments. Simulations conducted by SUMO confirm the effectiveness of FMAA.
2. Related Work
Current traffic signal timing methods can be divided into fixed and adaptive timings. Fixed timing methods are simple and feasible and usually allocate green time based on historical data or experience. Some traffic signal control systems based on fixed timing, such as TRANSYT [11], have been widely used in many cities. However, once their timing solutions are determined, they are not changed. Hence, they cannot adapt to dynamic traffic flows, particularly in complex urban environments. In contrast, adaptive timing methods are promising and work well when dealing with traffic congestion.
Adaptive timing methods have been widely used for traffic signal control [12,13]. The basic and important concept of adaptive timing is to design a flexible control strategy and then allocate an appropriate green time to each signal phase. In addition, it is a common way of converting traffic signal control into a mathematical problem [14,15,16]. Wang et al. built a linear dynamic traffic system model and proposed an adaptive Linear-Quadratic Regulator (LQR) based on this model to minimize traffic delay [14]. Liu et al. built a vehicle-based dynamic user equilibrium model and then constructed an agile traffic signal control system combined with the above model [15]. Yin et al. integrated Recursive Least-Squares Temporal Difference (RLS-TD()) learning into approximate dynamic programming. After modeling a dynamic traffic system at an intersection in discrete time, the above-presented method is implemented and achieves better results in terms of traffic delay and computation time [16].
In recent years, AI-based adaptive timing methods, particularly reinforcement learning, have become a research hotspot [17,18,19,20]. Wang et al. proposed a new multi-agent reinforcement learning method called Cooperative Double Q-learning (Co-DQL) for large-scale traffic signal control. To eliminate the overestimation problem and ensure exploration, Co-DQL uses a highly scalable independent double Q-learning method based on double estimators and the upper confidence bound policy [17]. Tan et al. built a cooperative deep reinforcement learning (Coder) framework to address the problem that the reinforcement learning action space grows exponentially with the number of intersections. The key of Coder is to decompose the original difficult task into many subproblems with relatively easy reinforcement learning goals [18]. Liang et al. proposed a deep reinforcement learning model to control traffic light cycles. The proposed model incorporates a dueling network, target network, double Q-learning network, and prioritized experience replay to improve the performance [19]. Zhang et al. described a new reinforcement learning algorithm utilized in a scenario where only a small portion of vehicles are detected by an intelligent traffic signal control system [20]. It can be observed that AI-based adaptive timing methods are good at solving large-scale traffic signal control problems, and they can adapt to random changes in traffic demand to a certain extent. However, these methods generally suffer from complex implementations and high costs. In addition, many of them only consider extending the green light duration of the current phase, and ignore the queuing of vehicles in other phases, so the green light time cannot be fully utilized.
In this paper, we design a more economical and simpler method called FMAA, which combines all-red control and adaptive timing, and shows good performance when dealing with conflicting traffic flows.
3. Models and Definitions
3.1. System Model
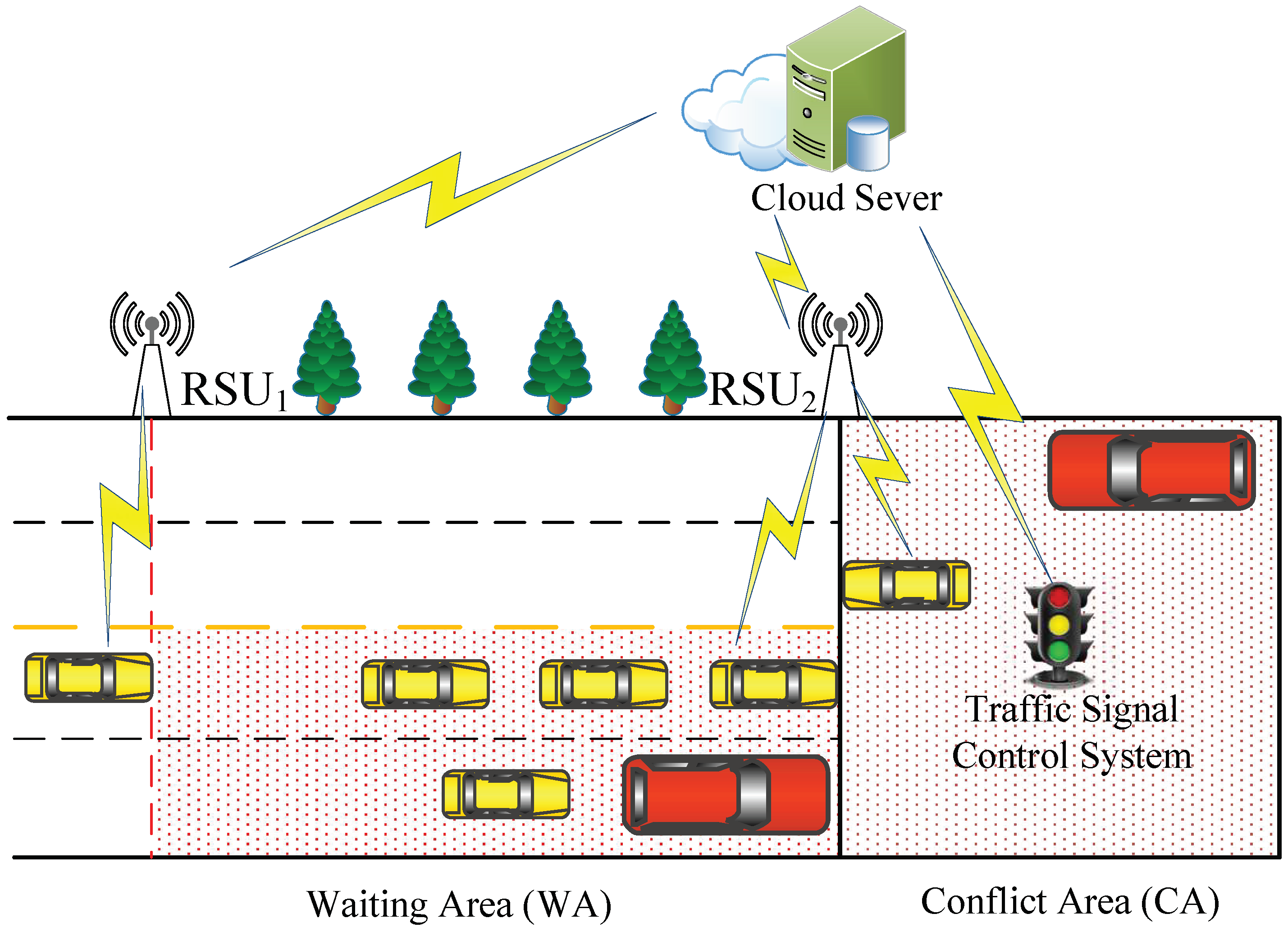
Optimizing the efficiency of an isolated intersection can improve the overall performance of a traffic network [21]. Therefore, this study investigated intelligent traffic signal timing methods for isolated intersections. First, we consider a V2I communication-based vehicular network environment based on previous research [7]. The system model is shown in Figure 1, and it satisfies the following assumptions:
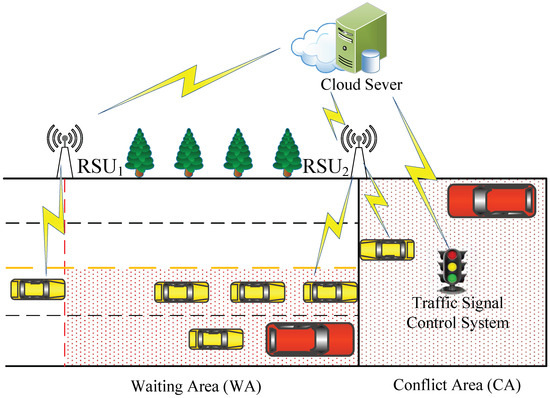
Figure 1.
System model.
- Vehicles travel on multi-lane roads, and each vehicle stops, goes straight, turns left, and turns right under the conduct of a signal light;
- Vehicles are equipped with On-Board Units (OBUs) and communicate with Road Side Units (RSUs) via Dedicated Short-Range Communication (DSRC) technology;
- Vehicles obtain position information using a digital map and GPS;
- There are no traffic accidents and the impacts of pedestrians and non-motor vehicles are ignored;
- The traffic signal control system is located at the center of the intersection, and it performs our flexible timing method based on the data provided by the cloud server.
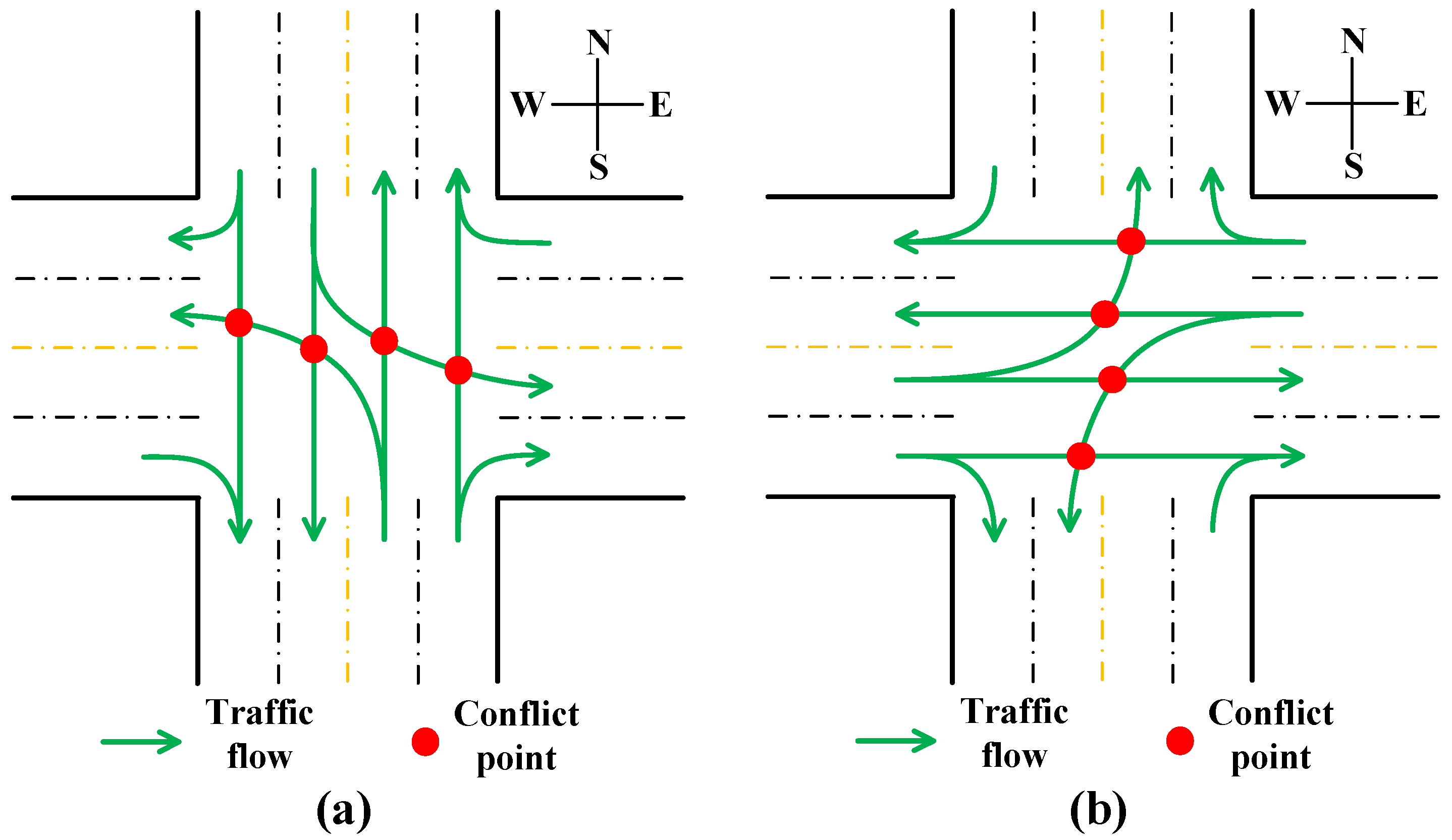
As shown in Figure 1, there is a Waiting Area (WA) and a Conflict Area (CA). WA is a rectangular region on one side of the intersection. CA is the square area in the center of the intersection that contains all the conflict points generated by the signal phases (see Figure 2), where conflicts can occur under heavy traffic.
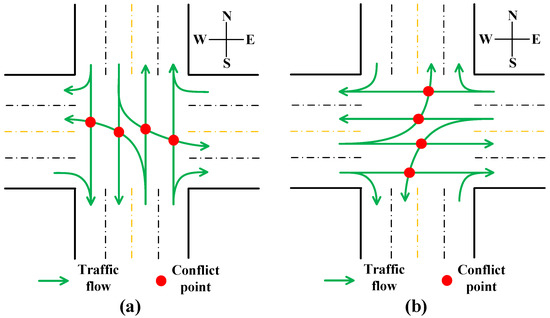
Figure 2.
Signal phases: (a) First signal phase. (b) Second signal phase.
Moreover, vehicles interact with RSUs when they enter or leave WA and CA. Specifically, each vehicle sends an entering WA message to when it enters the WA and sends a leaving CA message to when it leaves the CA. When a vehicle leaves WA, it can also be considered as entering CA; thus, the vehicle should send a leaving WA message to and send an entering CA message to . These messages contain fine-grained vehicle information and are used for signal timing. All of these contain a timestamp and a vehicle’s ID. Moreover, and recorded the vehicle type and direction. and upload the collected messages to the cloud server in real time, and the traffic signal control system executes our flexible timing method based on the processed data provided by the cloud server.
3.2. Signal Phase Model
In this study, we chose a common signal phase model with conflicting traffic flows in daily life, as shown in Figure 2. Ignoring right-turn traffic flows, the first signal phase included traffic flows from the north and south, and the second signal phase included traffic flows from the west and east. It can be seen that there are some conflict points caused by conflicting traffic flows, and straight driving has a high priority in this study when a conflict occurs.
4. Proposed Method
4.1. Basic Idea
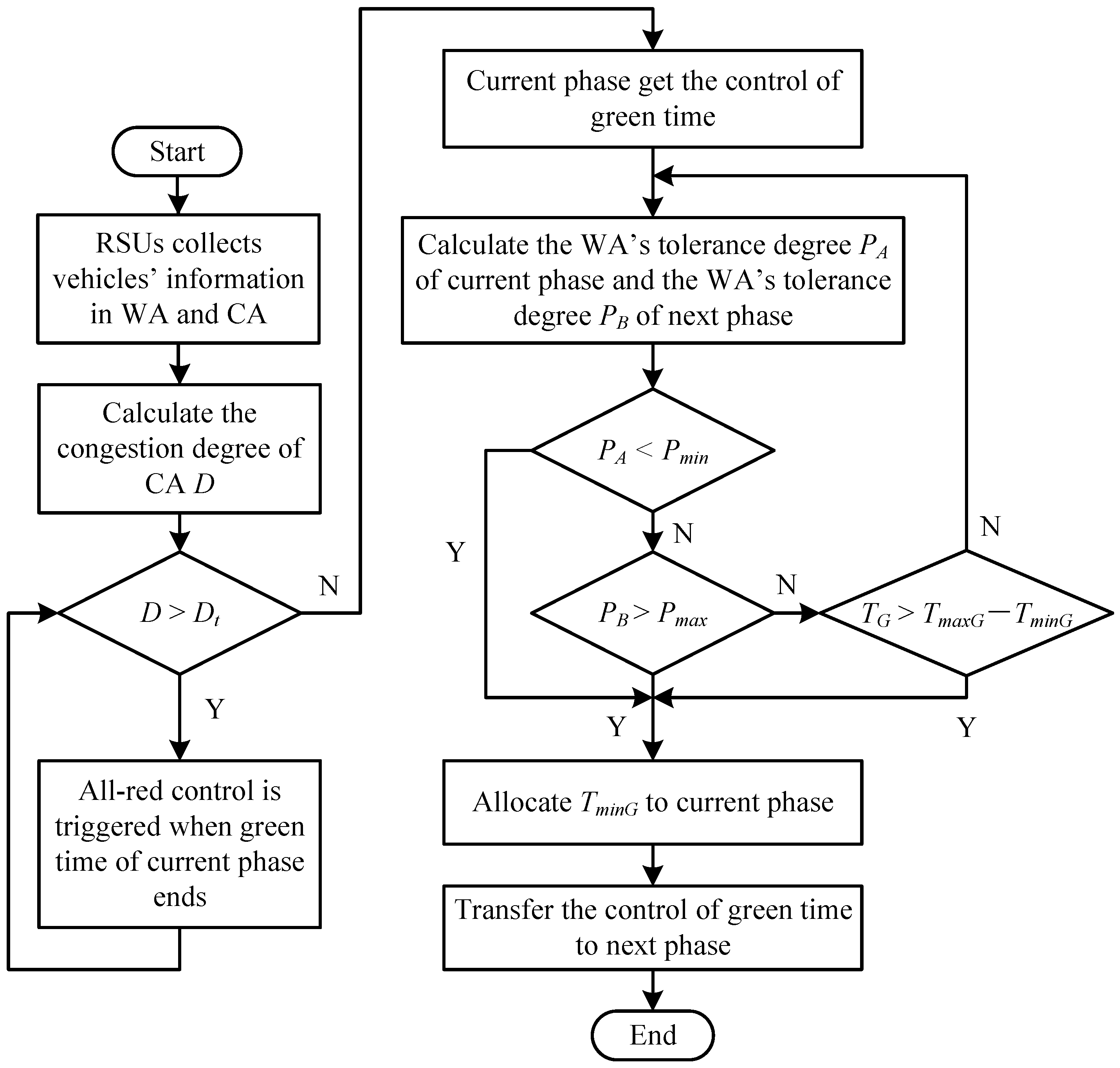
In this study, we propose a flexible signal timing method that combines all-red control and adaptive timing (FMAA) to improve traffic efficiency at an isolated intersection with conflicting traffic flows. The above-mentioned intersection is prone to severe congestion in heavy traffic, which leads to the failure of adaptive signal timing methods. To address this problem, we consider an all-red signal control method based on the congestion degree of CA; this method is triggered when the congestion degree of CA reaches a certain level. Moreover, to improve traffic efficiency in other cases, we propose an adaptive signal timing method based on the tolerance degrees of WAs. This method considers the subjective waiting time of drivers and objective traffic density to calculate the tolerance degree of WAs in the current and next signal phases and then allocates an appropriate green time for each phase. The FMAA procedure is illustrated in Figure 3.
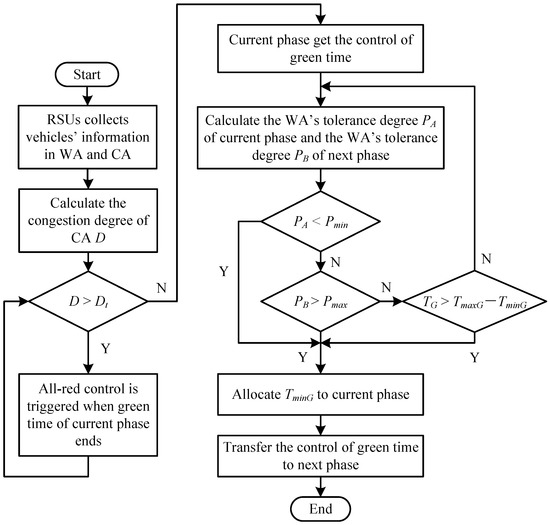
Figure 3.
Procedure of FMAA.
4.2. All-Red Signal Control Method
An all-red signal is a special state in which all the signal lights are red. It is helpful to evacuate blocked vehicles left over from the previous signal phase and improve the safety and traffic efficiency at intersections in heavy traffic [10]. Here, an All-red Signal Control (ASC) method is designed to eliminate the effects of conflicting traffic flows, and the premise of executing the ASC method is that the congestion degree of the CA reaches a certain level.
Considering the influence of vehicle differences on signal timing, three types of vehicles (i.e., small, medium, and large) are considered in this study, and the congestion degree of the CA depends on the current number and types of vehicles within this area. Because all entering and leaving CA messages are collected and uploaded, a comprehensive weight W of all vehicles within this area is calculated by the cloud server.
where is the weight of vehicle i, and n is the number of vehicles within the CA. The value of depends on the type of vehicle.
As shown in Equation (3), the value of W is updated when vehicle j with weight enters or leaves the CA.
Finally, the congestion degree of CA, denoted as D, is calculated as follows:
where is the side length of CA.
The congestion degree of CA is calculated in real-time. When it is larger than the threshold, Dt, there is a high risk of severe congestion in the CA caused by conflicting traffic flows. Then, the proposed FMAA executes an all-red control after the remaining green time of the current signal phase expires.
4.3. Adaptive Signal Timing
When the congestion degree of the CA is relatively low, an Adaptive Signal Timing (AST) method based on the tolerance degrees of the WAs is utilized to improve traffic efficiency. It should be noted that the subjective waiting time of drivers and objective traffic density are all considered by the AST to calculate the tolerance degree of the WA.
4.3.1. The Tolerance Degree of WA
(a) Subjective waiting time of drivers
Long waits tend to make drivers impatient at intersections, particularly in light traffic. records the timestamps of all vehicles within the WA, and a timestamp expires if the corresponding vehicle leaves the WA. Therefore, the waiting time of the drivers can be estimated using valid timestamps.
The first vehicle in the queue tends to have the longest waiting time. Suppose that at time , this vehicle enters the WA with speed v, moves at a uniform speed of duration , and stops at the WA boundary after deceleration for duration . Thus, we obtain the following relationships:
where is the length of the WA and is the deceleration of the vehicle.
We can then obtain the motion time of the vehicle based on the above two equations.
If the current time is , then the driver’s subjective waiting time is calculated as follows:
To quantify the above time more properly, the tolerance degree of the driver is introduced. It is denoted by p and is expressed as follows:
where is the interval between two green lights in the current signal phase and is directly provided by the traffic signal control system.
(b) Objective traffic density
Traffic density reflects the current traffic conditions and timing requirements. The denser the vehicles, the longer the green time required is for the current signal phase. In this study, the objective traffic density of the WA is detected in real-time and calculated as follows:
where is the length of vehicle i, is the spacing between vehicles, m is the number of vehicles within WA, and k is the number of lanes in one direction.
Similarly, the value of depends on the type of the vehicle.
(c) Calculation of WA’s tolerance degree
Finally, the tolerance degree of WA (denoted as P) is calculated based on the tolerance degree of driver p and the traffic density of WA q using a simple weighting method.
herein, is a weight coefficient and .
4.3.2. The Steps of AST
The AST method works when the all-red control is not activated and is mainly affected by the tolerance degree of the WA. As shown in Figure 3 as follows:
- Step 1: The cloud server calculates the WA’s tolerance degree of the current signal phase and the WA’s tolerance degree of the next signal phase in real-time and sends them to the traffic signal control system;
- Step 2: The traffic signal control system compares the and values, where is the minimum tolerance threshold. If , it goes to Step 5. Otherwise, go to Step 3;
- Step 3: The traffic signal control system compares the and values, where is the maximum tolerance threshold. If , it goes to Step 5. Otherwise, go to Step 4;
- Step 4: The traffic signal control system checks whether the continuous green time of the current signal phase is greater than the difference between the maximum green time and minimum green time . If the condition is satisfied, go to Step 5. Otherwise, go to Step 1;
- Step 5: The traffic signal control system allocates the minimum green time to the current signal phase;
- Step 6: The traffic signal control system transfers the green light control to the next signal phase, and the procedure ends.
In this way, the AST method allocates an appropriate green time to each signal phase under non-severe congestion scenarios, and dense vehicles with long waiting times will enjoy a longer green time.
5. Experiments and Analysis
5.1. Experimental Environment and Parameters
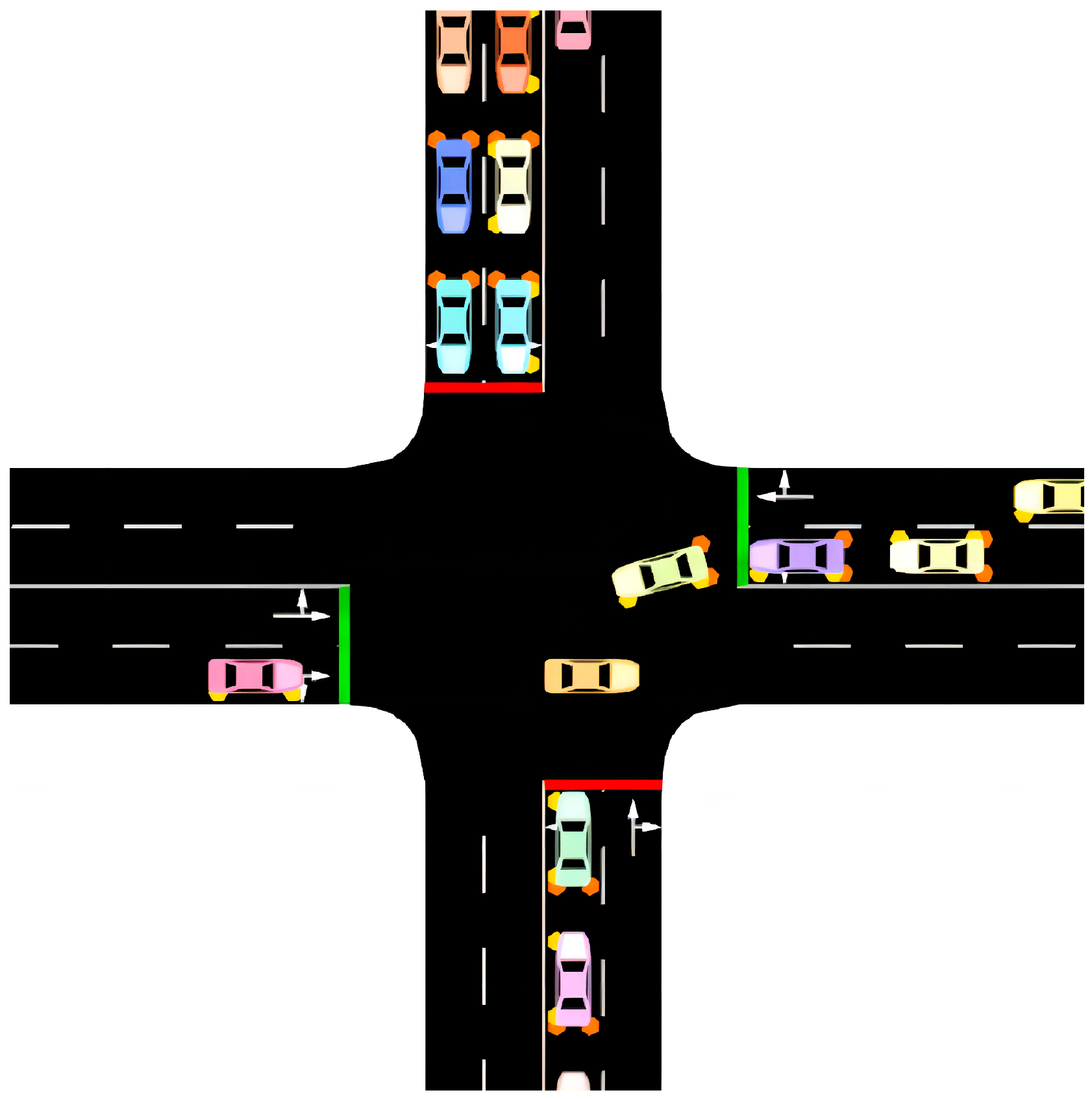
Finally, we implemented and evaluated our proposed FMAA method and comparative methods in a simulated vehicular environment built using an open-source traffic simulation suite; that is, SUMO (Simulation of Urban MObility) [22]. Traffic signal control methods are implemented via TraCI (Traffic Control Interface) provided by SUMO. As shown in Figure 4, a two-way four-lane isolated intersection was built in SUMO, and the generation of vehicles satisfied the random process distribution. The main simulation parameters are listed in Table 1.
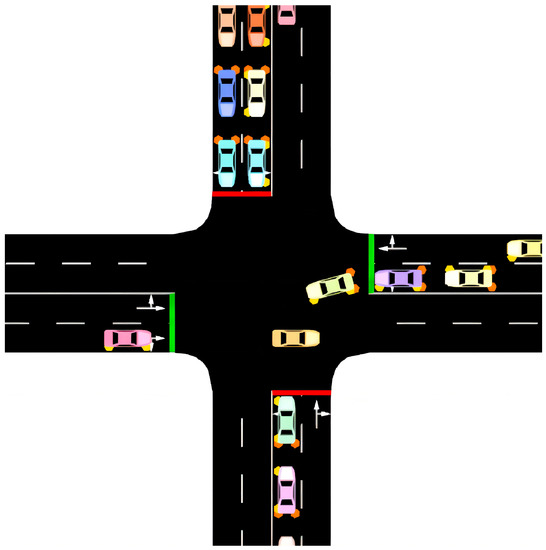
Figure 4.
Vehicular traffic environment in SUMO.

Table 1.
The main simulation parameters.
5.2. Results and Analysis
The proposed FMAA method was compared with a fixed timing method (denoted as Fixed Timing) and two adaptive timing methods provided by SUMO. Specifically, these two adaptive timing methods are delay-based and phase-prolongation-based methods, which are also denoted as Adaptive timing A and Adaptive timing B, respectively. Under different traffic conditions, the above four signal timing methods were compared in terms of the average speed, waiting time, and congested vehicles. SUMO outputs statistical data every 100 s, and we take the average values through multiple experiments.
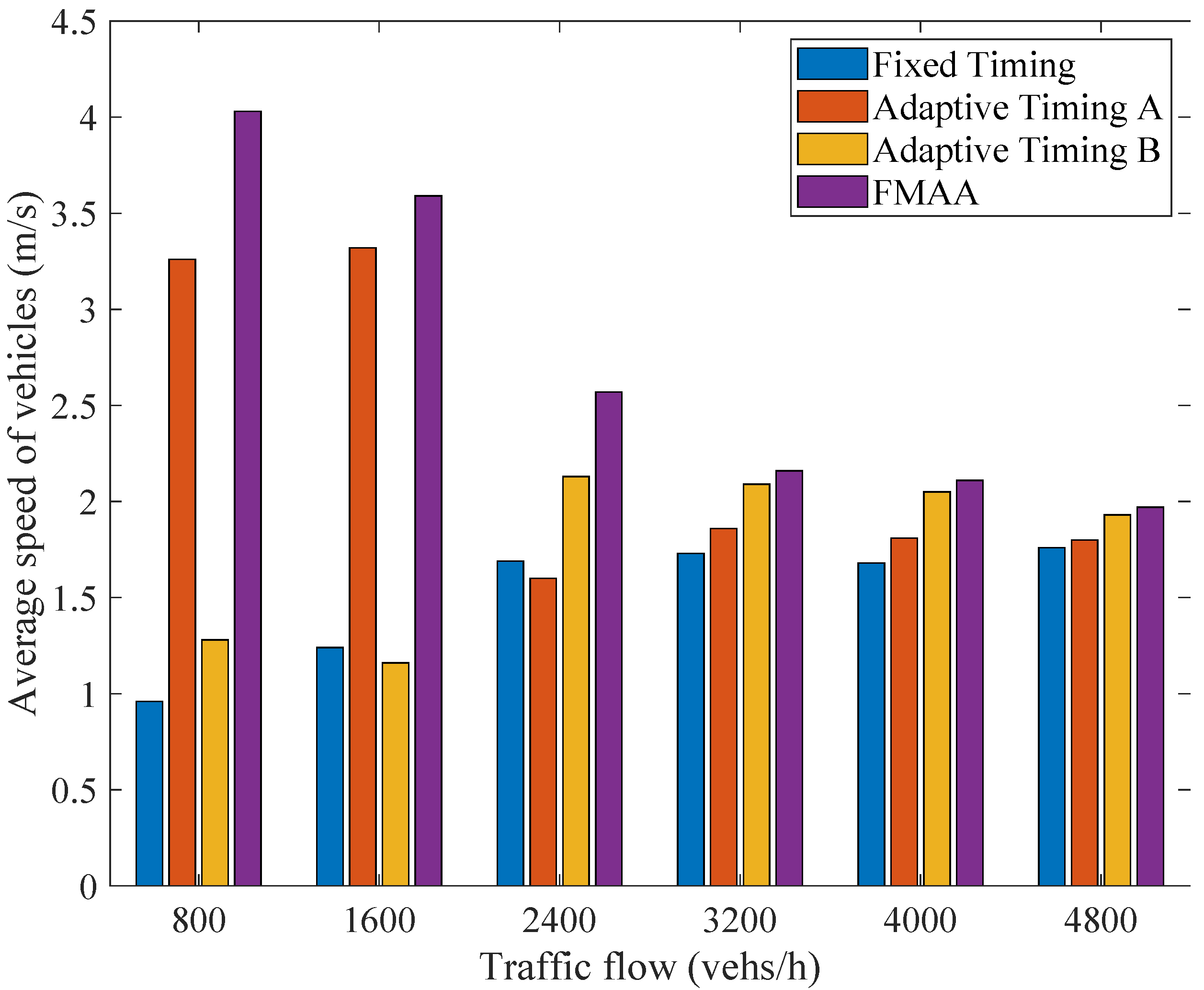
The average speed of vehicles directly reflects the traffic efficiency at intersections. Figure 5 shows the average speed of the vehicles for the four methods under different traffic conditions. It can be seen that the results of Fixed Timing and Adaptive Timing B are relatively slow when in light traffic; then, they slowly increase with the increase in traffic flow and finally reach a steady state; this is because the Fixed Timing method does not consider the impact of dynamic traffic flows on traffic signal control, and it works poorly under changing traffic conditions. Adaptive timing B pays attention to the impact of delay on traffic signal control, sacrificing some performance on the average speed metric. Meanwhile, Adaptive Timing A and our proposed FMAA show better overall performance, especially in light traffic. In particular, compared with the better-performing Adaptive Timing A, FMAA increases the average speed of vehicles by 23.62% in light traffic (i.e., 800 vehicles per hour). In addition, the average speed of all methods finally tends to a certain stable value in heavy traffic, and FMAA shows an advantage over others, mainly because of the use of all-red control.
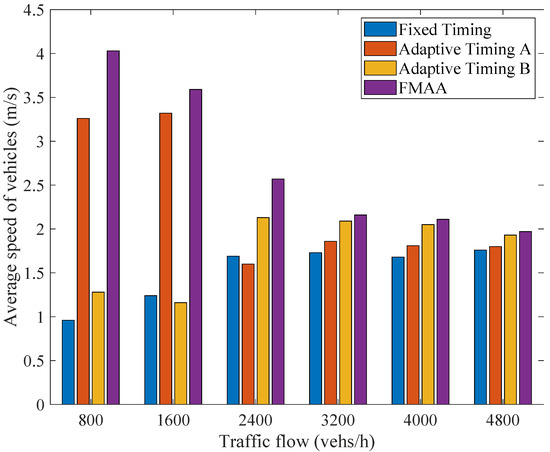
Figure 5.
Average speed of vehicles.
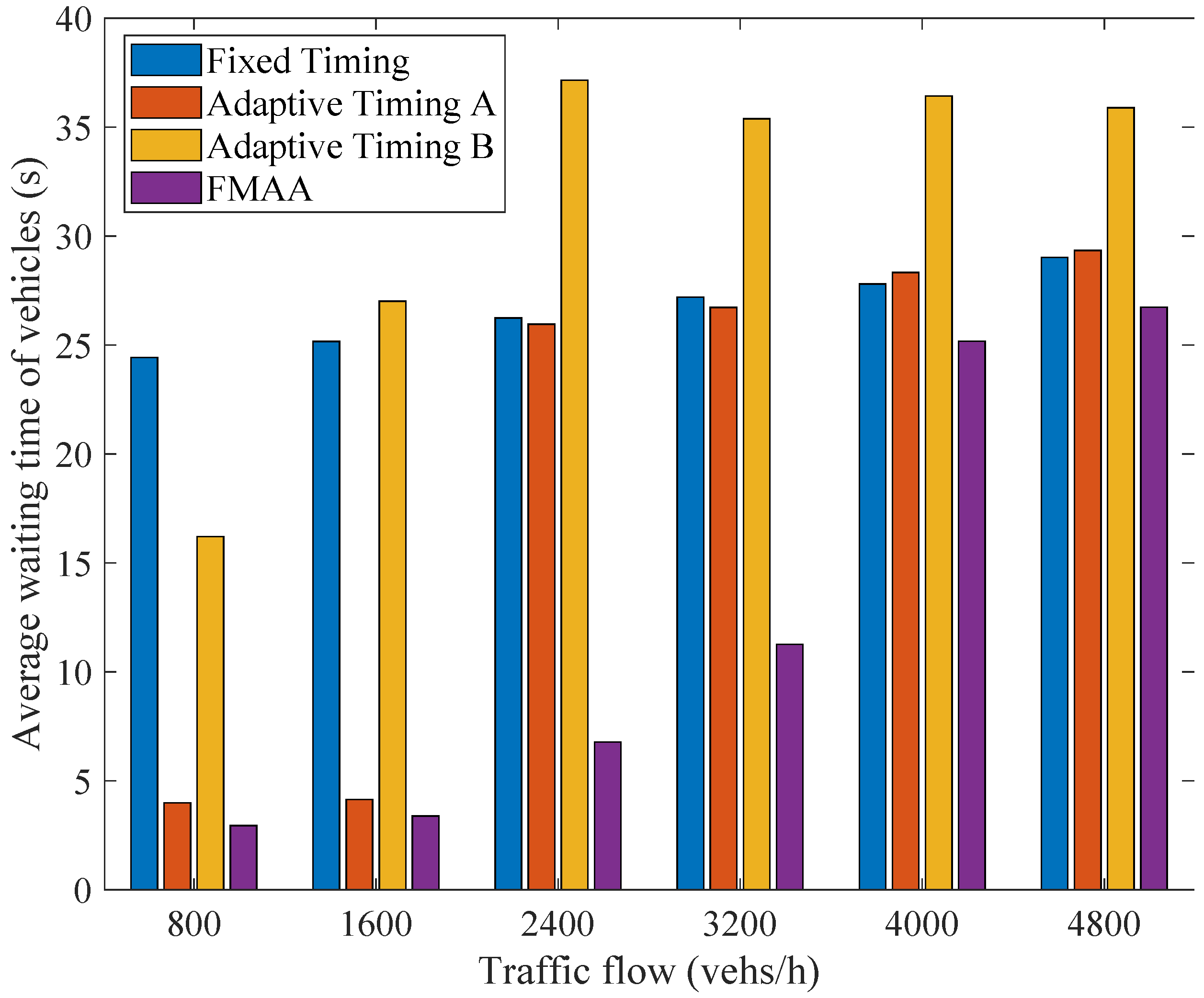
The average waiting time indicates the average lost time for vehicles passing through the intersection. Figure 6 shows the average waiting time of the four methods under different traffic conditions. It can be seen that the results of Fixed Timing and Adaptive timing B are relatively poor in any traffic condition; the reason is the same as explaining the average speed in Figure 5. Due to the full consideration of the impact on traffic signal control caused by changing traffic flows, Adaptive timing A performs better when in light traffic and gradually worsens as the traffic flow increases. However, the proposed FMAA method shows a good overall performance. In particular, compared with better-performing Adaptive timing A, FMAA reduces the average waiting time by 26.07% in light traffic (i.e., 800 vehicles per hour). In addition, the results of all methods eventually tend to a certain stable value in heavy traffic, and the performance of the FMAA is still the best.
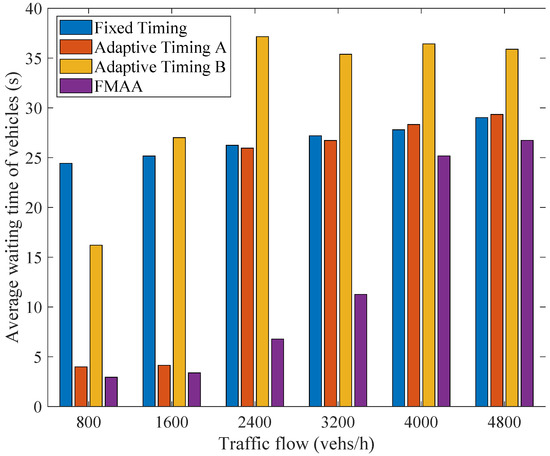
Figure 6.
Average waiting time of vehicles.
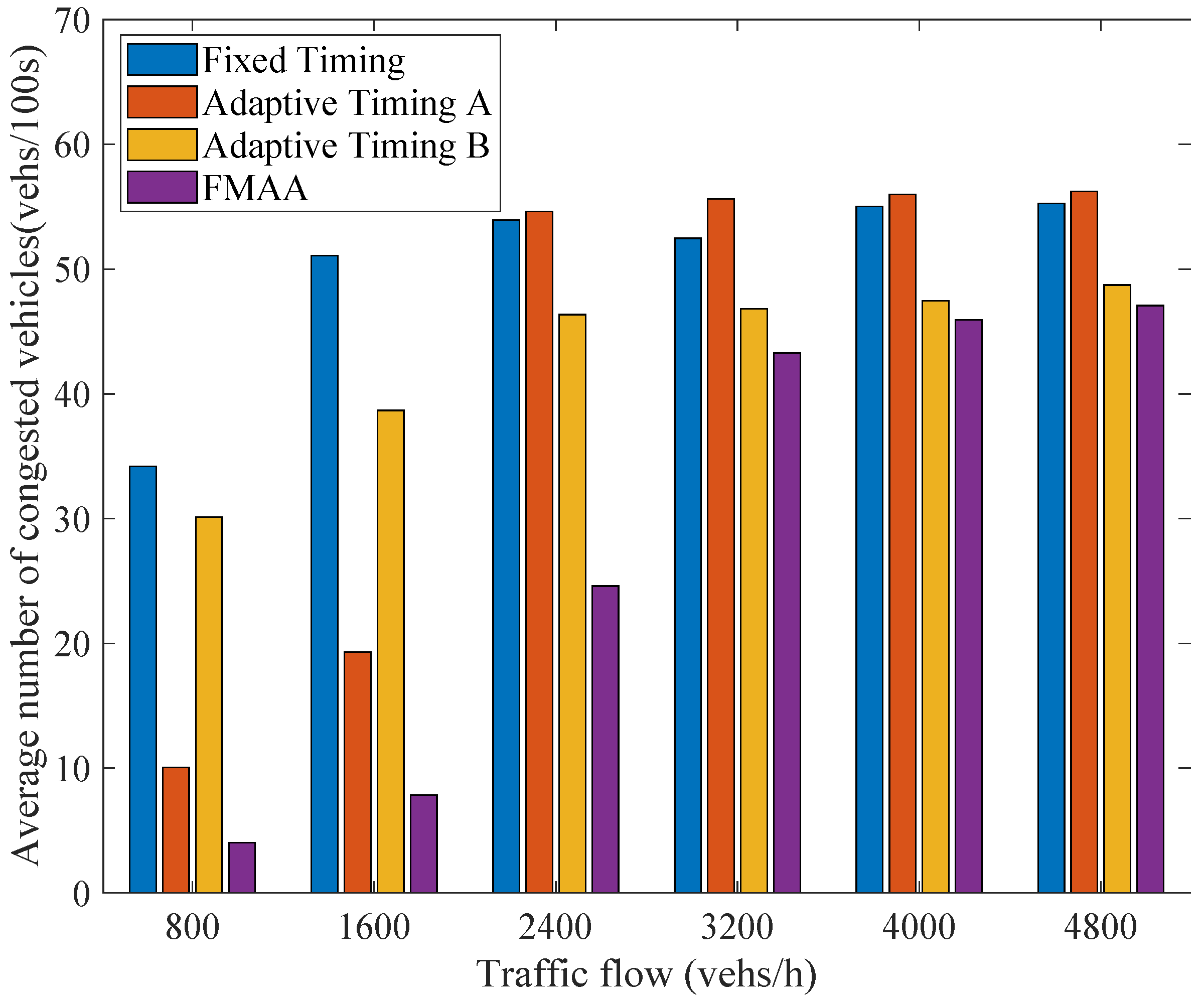
The average number of congested vehicles per 100 s under different traffic conditions is shown in Figure 7. It can be seen that the results of all methods are proportional to the traffic flow in light traffic (i.e., less than 2400 vehicles per hour), and all of them tend to a certain steady state in heavy traffic. This is because the fixed timing method does not have the ability to deal with dynamic traffic flows, so it performs the worst; compared with the other two adaptive timing methods, only FMAA takes into account the congestion degree of AC and achieves the best results by utilizing all-red control. Overall, Adaptive timing A and FMAA methods perform better in light traffic, and Adaptive timing B and FMAA perform better in heavy traffic. In particular, compared with Adaptive timing A, FMAA reduces the average number of congested vehicles by 16.26% in heavy traffic (i.e., 4800 vehicles per hour). The overall performance of the FMAA is good, indicating that it works well with conflicting traffic flows.
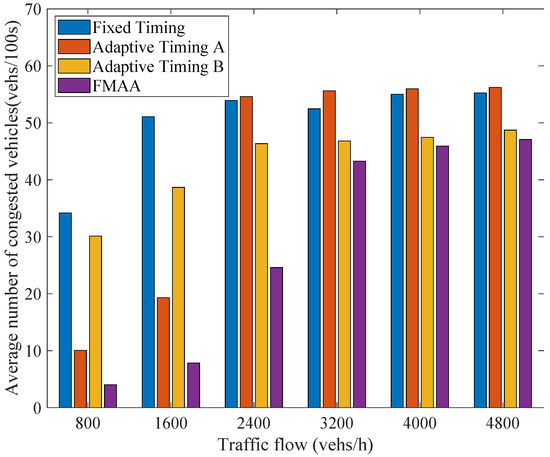
Figure 7.
Average number of congested vehicles.
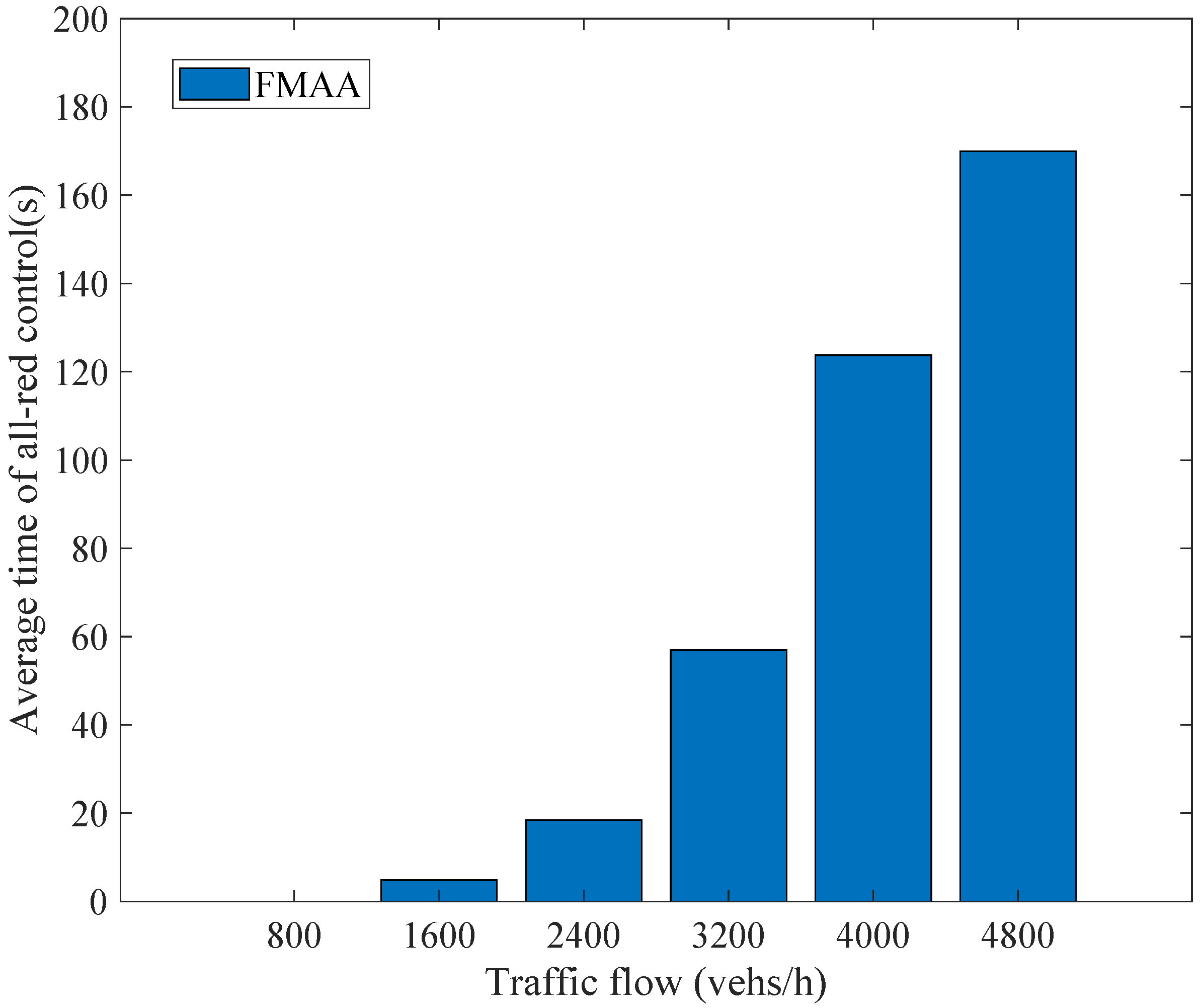
Finally, the average time of all-red control under different traffic conditions within 3600 s is shown in Figure 8. It can be seen that the time of all-red control is 0 or extremely small when in light traffic (i.e., less than 1600 vehicles per hour); this is because the congestion degree of CA is hard to reach the threshold for triggering the all-red control. However, as the traffic flow increases, the congestion degree of CA continues to increase, and all-red control is more likely to occur. Moreover, we can see from Figure 5, Figure 6, Figure 7 and Figure 8 that even adaptive timing methods struggle to show their advantages in dense traffic. However, our proposed FMAA method shows the best overall performance due to the use of all-red control, indicating the effectiveness of the special control mechanism.
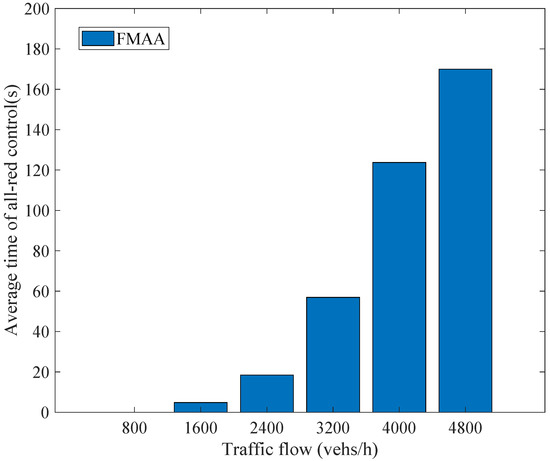
Figure 8.
Average time of all-red control.
6. Conclusions
Conflicting traffic flows at intersections are prone to cause severe congestion in heavy traffic; however, existing adaptive signal timing methods are difficult to cope with. Our study proposes a flexible signal timing method, FMAA, applied in a vehicular network environment. The FMAA method adopts all-red control to solve severe congestion issues caused by conflicting traffic flows, and an adaptive timing method was utilized to improve traffic efficiency at the intersection. It is worth explaining that the calculations involved in the above methods rely on fine-grained information of vehicles provided by real-time interactions via V2I commutation. Moreover, simulations conducted using SUMO showed good performance of the FMAA.
Emergency vehicles such as ambulances and fire engines are special vehicles that require priority at intersections. Future research should consider designing flexible, adaptive timing methods for special vehicles in complex urban environments with conflicting traffic flows.
Author Contributions
Conceptualization, L.N. and Q.W.; Data curation, Q.W. and M.Z.; Formal analysis, L.N. and Q.W.; Funding acquisition, L.N. and L.W.; Investigation, L.N. and Q.W.; Methodology, L.N. and Q.W.; Project administration, L.N. and L.W.; Resources, L.N.; Software, Q.W. and M.Z.; Supervision, L.N. and L.W.; Validation, L.N., Q.W. and M.Z.; Visualization, L.N. and Q.W.; Writing—original draft, Q.W.; Writing—review and editing, L.N. and L.W. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the National Natural Science Foundation of China (No. 61802286, U20A20177), Key R&D plan of Hubei Province (No. 2021BAA025).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The article contains the data, which are also available from the corresponding author upon reasonable request.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| CA | Conflict Area |
| WA | Waiting Area |
| ASC | All-red Signal Control |
| AST | Adaptive Signal Timing |
| FMAA | Flexible signal timing method that combines all-red control and adaptive timing |
References
- Rafter, C.B.; Anvari, B.; Box, S.; Cherrett, T. Augmenting traffic signal control systems for urban road networks with connected vehicles. IEEE Trans. Intell. Transp. Syst. 2020, 21, 1728–1740. [Google Scholar] [CrossRef]
- Al-Qutwani, M.; Wang, X. Smart traffic lights over vehicular named data networking. Information 2019, 10, 83. [Google Scholar] [CrossRef]
- Santhosh, K.K.; Shrohan, M.; Debi, P.D.; Partha, P.R.; Byung-Gyu, K. Computer vision-guided intelligent traffic signaling for isolated intersections. Expert Syst. Appl. 2019, 134, 267–278. [Google Scholar]
- Chen, L.; Zou, Q.; Pan, Z.; Lai, D.; Cao, D. Surrounding vehicle detection using an FPGA panoramic camera and deep CNNs. IEEE Trans. Intell. Transp. Syst. 2020, 21, 5110–5122. [Google Scholar] [CrossRef]
- Liu, H.; Ma, J.; Xu, T.; Yan, W.; Zhang, X. Vehicle detection and classification using distributed fiber optic acoustic sensing. IEEE Trans. Veh. Technol. 2020, 69, 1363–1374. [Google Scholar] [CrossRef]
- Zhang, X.; Huang, H. Vehicle classification based on feature selection with anisotropic magnetoresistive sensor. IEEE Sens. J. 2019, 19, 9976–9982. [Google Scholar] [CrossRef]
- Wu, L.; Nie, L.; Khan, S.U.; Khalid, O.; Wu, D. A V2I communication-based pipeline model for adaptive urban traffic light scheduling. Front. Comput. Sci. 2019, 13, 929–942. [Google Scholar] [CrossRef]
- Bazzi, A.; Zanella, A.; Masini, B.M. A distributed virtual traffic light algorithm exploiting short range V2V communications. Ad Hoc Netw. 2016, 49, 42–57. [Google Scholar] [CrossRef]
- Tiaprasert, K.; Zhang, Y.; Wang, X.B.; Zeng, X. Queue length estimation using connected vehicle technology for adaptive signal control. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2129–2140. [Google Scholar] [CrossRef]
- Kwon, S.K.; Jung, H.; Kim, K.D. Dynamic all-red signal control based on deep neural network considering red light runner characteristics. Appl. Sci. 2020, 10, 6050. [Google Scholar] [CrossRef]
- Robertson, D.I. TRANSYT: A Traffic Network Study Tool; Road Research Laboratory Report; Road Research Laboratory: Birmingham, UK, 1969. [Google Scholar]
- Li, W.; Ban, X. Connected vehicles based traffic signal timing optimization. IEEE Trans. Intell. Transp. Syst. 2019, 20, 4354–4366. [Google Scholar] [CrossRef]
- Liu, H.; Lu, X.Y.; Shladover, S.E. Traffic signal control by leveraging Cooperative Adaptive Cruise Control (CACC) vehicle platooning capabilities. Transp. Res. Part Emerg. Technol. 2019, 104, 390–407. [Google Scholar] [CrossRef]
- Wang, H.; Zhu, M.; Hong, W.; Wang, C.; Wang, Y. Optimizing signal timing control for large urban traffic networks using an adaptive linear quadratic regulator control strategy. IEEE Trans. Intell. Transp. Syst. 2022, 23, 333–343. [Google Scholar] [CrossRef]
- Wang, H.; Zhu, M.; Hong, W.; Wang, C.; Wang, Y. An agile vehicle-based dynamic user equilibrium scheme for urban traffic signal control. IET Intell. Transp. Syst. 2021, 15, 619–634. [Google Scholar]
- Yin, B.; Dridi, M.; Moudni, A.E. Recursive least-squares temporal difference learning for adaptive traffic signal control at intersection. Neural Comput. Appl. 2019, 31, 1013–1028. [Google Scholar] [CrossRef]
- Wang, X.; Ke, L.; Qiao, Z.; Chai, X. Large-scale traffic signal control using a novel multiagent reinforcement learning. IEEE Trans. Cybern. 2021, 51, 174–187. [Google Scholar] [CrossRef]
- Tan, T.; Bao, F.; Deng, Y.; Jin, A.; Dai, Q.; Wang, J. Cooperative deep reinforcement learning for large-scale traffic grid signal control. IEEE Trans. Cybern. 2020, 50, 2687–2700. [Google Scholar] [CrossRef] [PubMed]
- Liang, X.; Du, X.; Wang, G.; Han, Z. A deep reinforcement learning network for traffic light cycle control. IEEE Trans. Veh. Technol. 2019, 68, 1243–1253. [Google Scholar] [CrossRef]
- Zhang, R.; Ishikawa, A.; Wang, W.; Striner, B.; Tonguz, O. Intelligent traffic signal control: Using reinforcement learning with partial detection. IEEE Trans. Intell. Transp. Syst. 2021, 22, 404–415. [Google Scholar] [CrossRef]
- Wunderlich, R.; Liu, C.; Elhanany, I.; Urbanik, T. A novel signal-scheduling algorithm with quality-of-service provisioning for an isolated intersection. IEEE Trans. Intell. Transp. Syst. 2008, 9, 536–547. [Google Scholar] [CrossRef] [Green Version]
- Lopez, P.A.; Behrisch, M.; Bieker-Walz, L.; Erdmann, J.; Flötteröd, Y.P.; Hilbrich, R.; Lücken, L.; Rummel, J.; Wagner, P.; Wiessner, E. Microscopic traffic simulation using SUMO. In Proceedings of the 21st International Conference on Intelligent Transportation Systems (ITSC 2018), Maui, HI, USA, 4–7 November 2018. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).