
Research on Anti-Occlusion Correlation Filtering Tracking Algorithm Based on Adaptive Scale


Abstract
:1. Introduction
- (1)
- During the movement of the target (a variety of factors can affect the performance and efficiency of the tracking algorithm) the algorithm must not only solve the target itself by the light, deformation, and rapid movement brought about by the interference, but also to solve the target by obstacles or even by other targets partially obscured or completely obscured. Furthermore, in some image sequences the target moved out of the field of view, in the actual application scenario there may also be complex climate conditions change, excessive external noise and other factors of interference. These are the main technical challenges of the current tracking algorithms to ensure tracking accuracy while taking into account the real-time tracking performance;
- (2)
- Model update strategy and update interval selection problem: if the update is too frequent, it will lead to a large amount of model computation and thus affect the real-time problem, and may lead to the loss of some feature information; if the update is too slow, there may be a drift of the tracking frame caused by feature changes occurring too quickly;
- (3)
- Search box size selection problem: If the search box is too small, it is not easy to detect fast-moving targets; if the search box is too large, it will introduce a lot of useless background information, and even some backgrounds similar to the target will interfere with the target tracking process, leading to the degradation of the model and the phenomenon of tracking drift.
- (1)
- For the defects of single features, a serial feature fusion strategy is used to fuse multiple features for feature extraction;
- (2)
- A scale adaptation strategy is proposed for the target frame size fixation problem to cope with the large deformation of the target during the tracking process;
- (3)
- To address the problem of contamination of the extracted target appearance features due to occlusion, an anti-occlusion detection model update strategy is proposed;
- (4)
- For some complex application scenarios, the discriminative power is enhanced by adding contextual information blocks.
2. Related Work
3. Analysis of KCF Algorithm
3.1. Ridge Regression
3.2. Model Updates
4. Improved KCF Algorithm
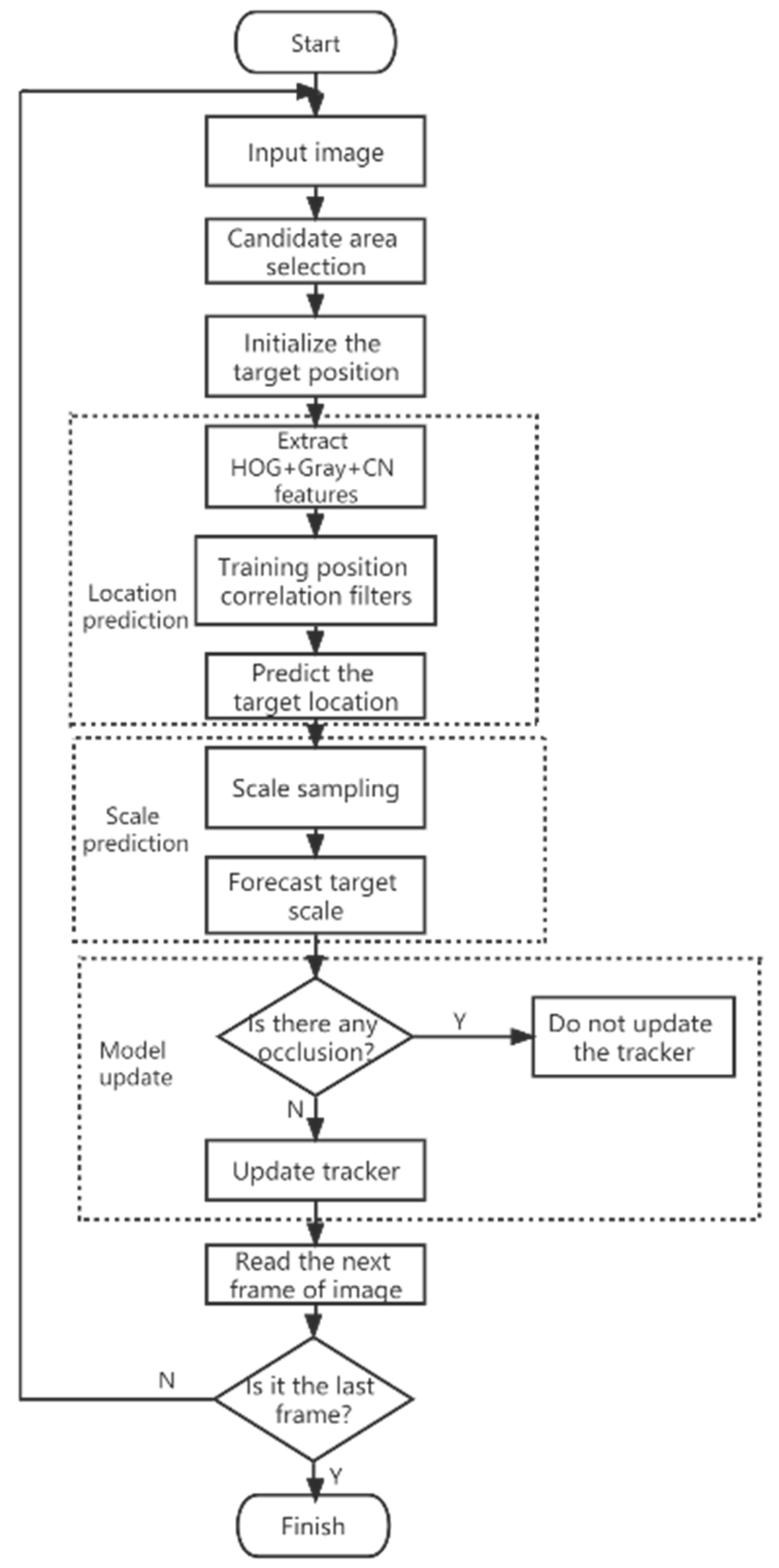
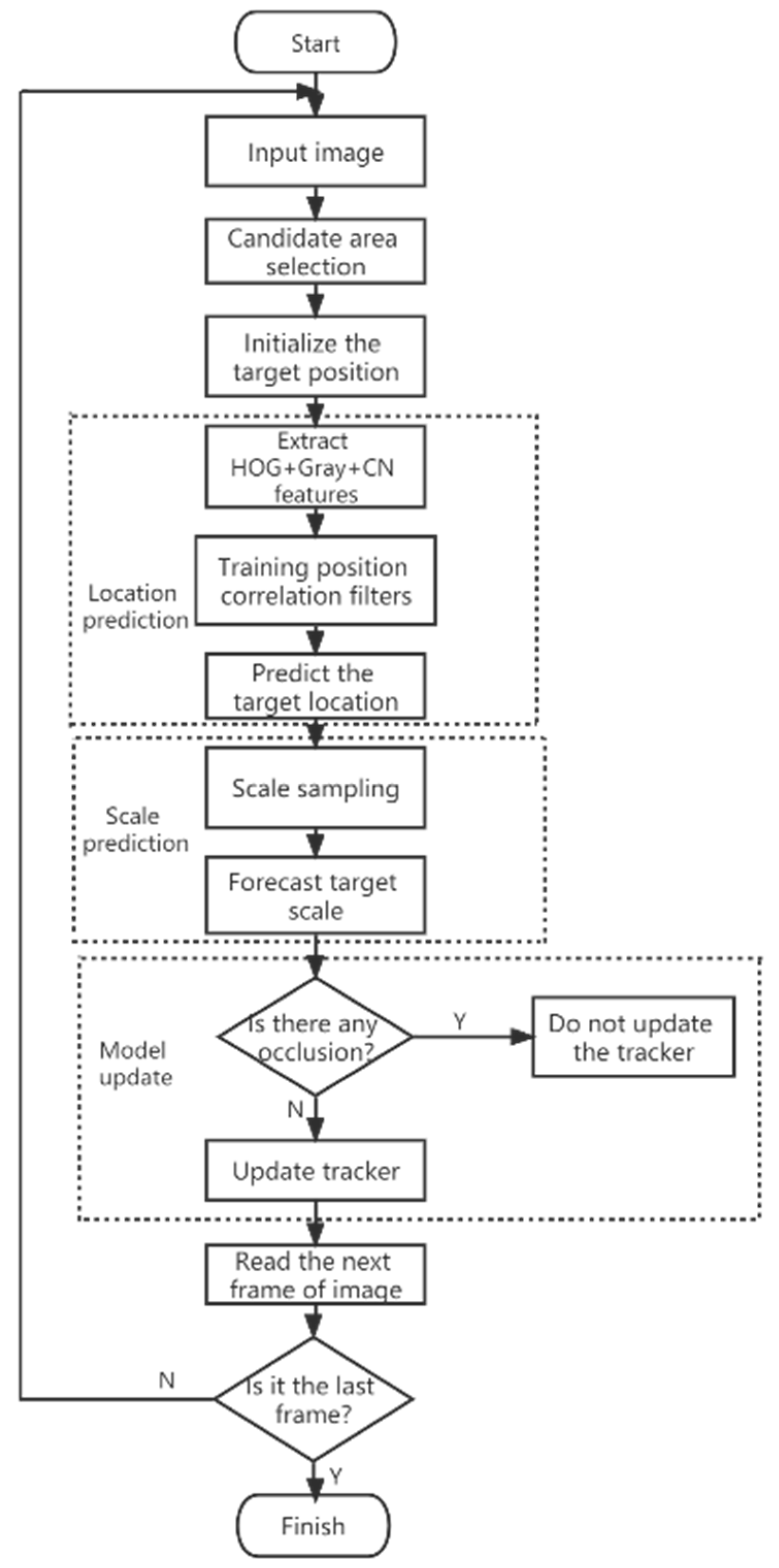
4.1. Overall Flow of the Algorithm
4.2. Feature Extraction Based on Multi-Feature Fusion
- (1)
- Serial fusion of these features is performed to obtain a total number of 42 feature channels;
- (2)
- The feature maps of these 42 channels are pixel summed to obtain a single channel manual feature map;
- (3)
- The obtained manual features are adjusted to the same size to get the final fused features.
4.3. Scale Adaptive Evaluation
4.4. Model Update Strategy
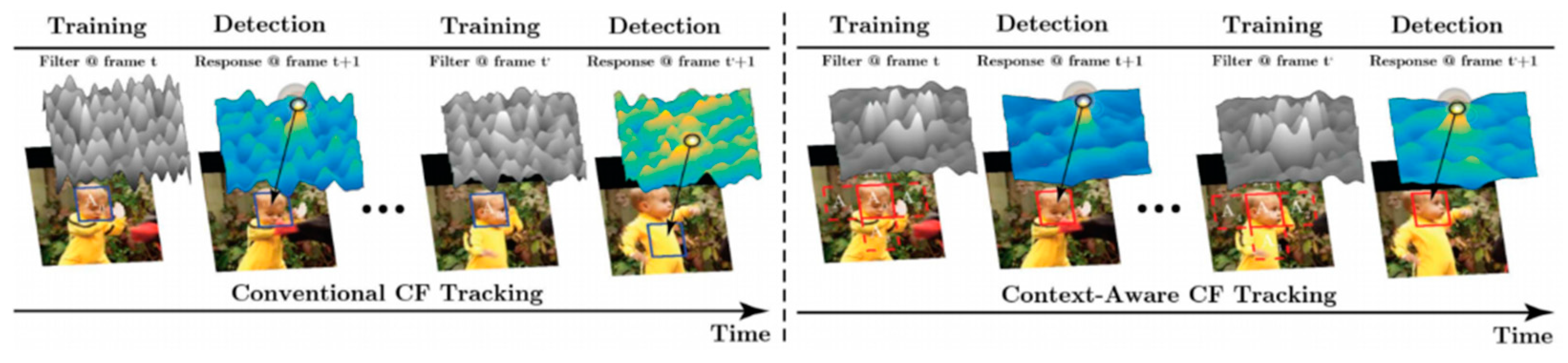
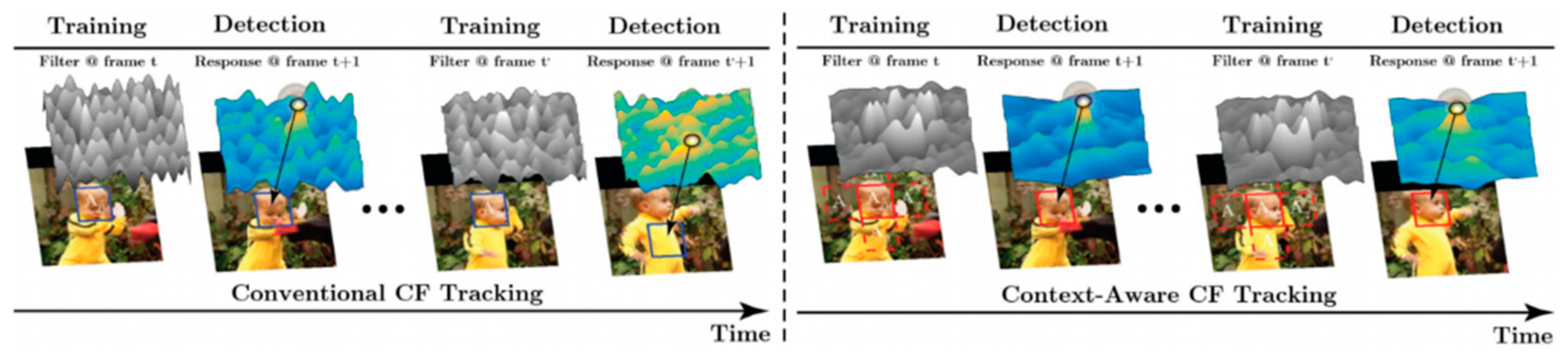
4.5. Context-Aware Correlation Filters
5. Experimental Results and Analysis
5.1. Experimental Environment and Configuration
5.2. Evaluation Indicators
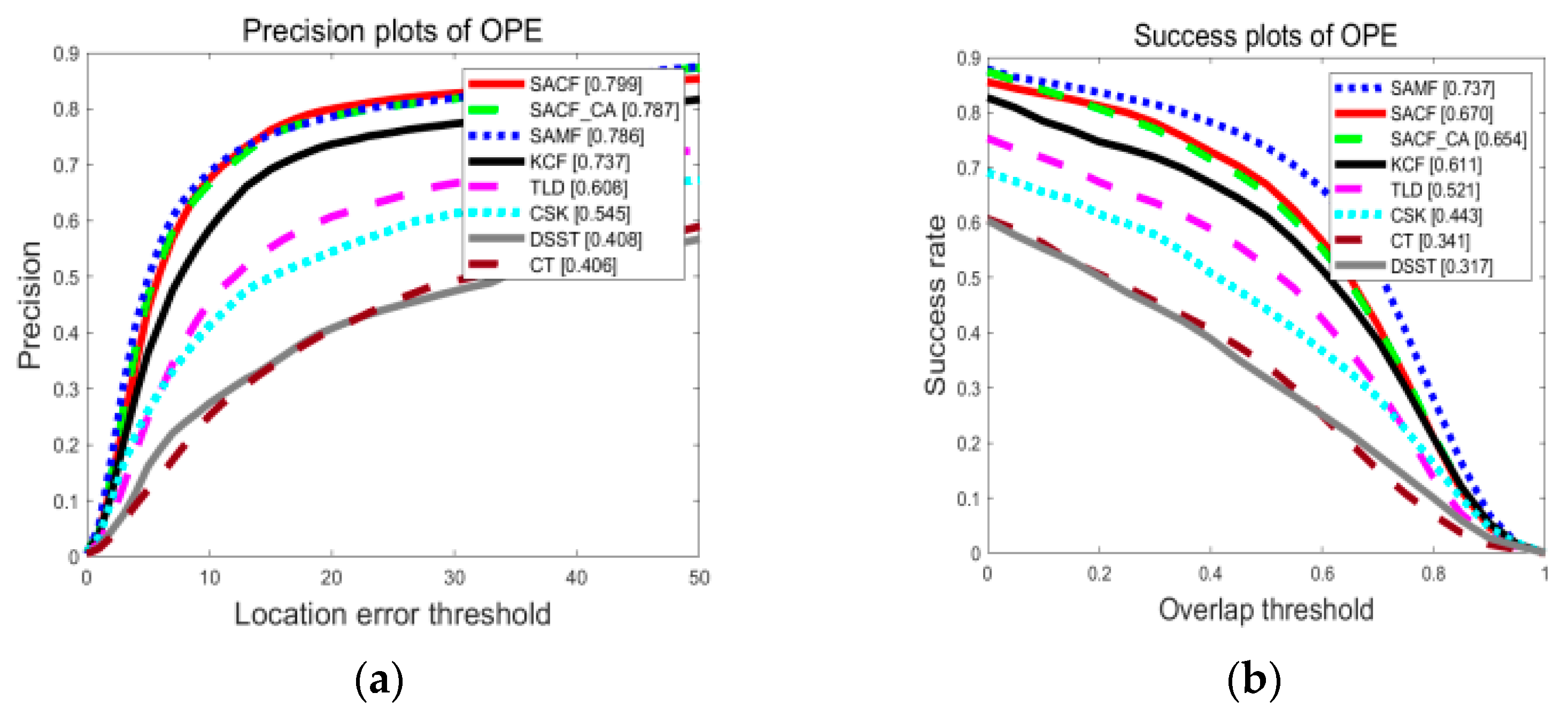
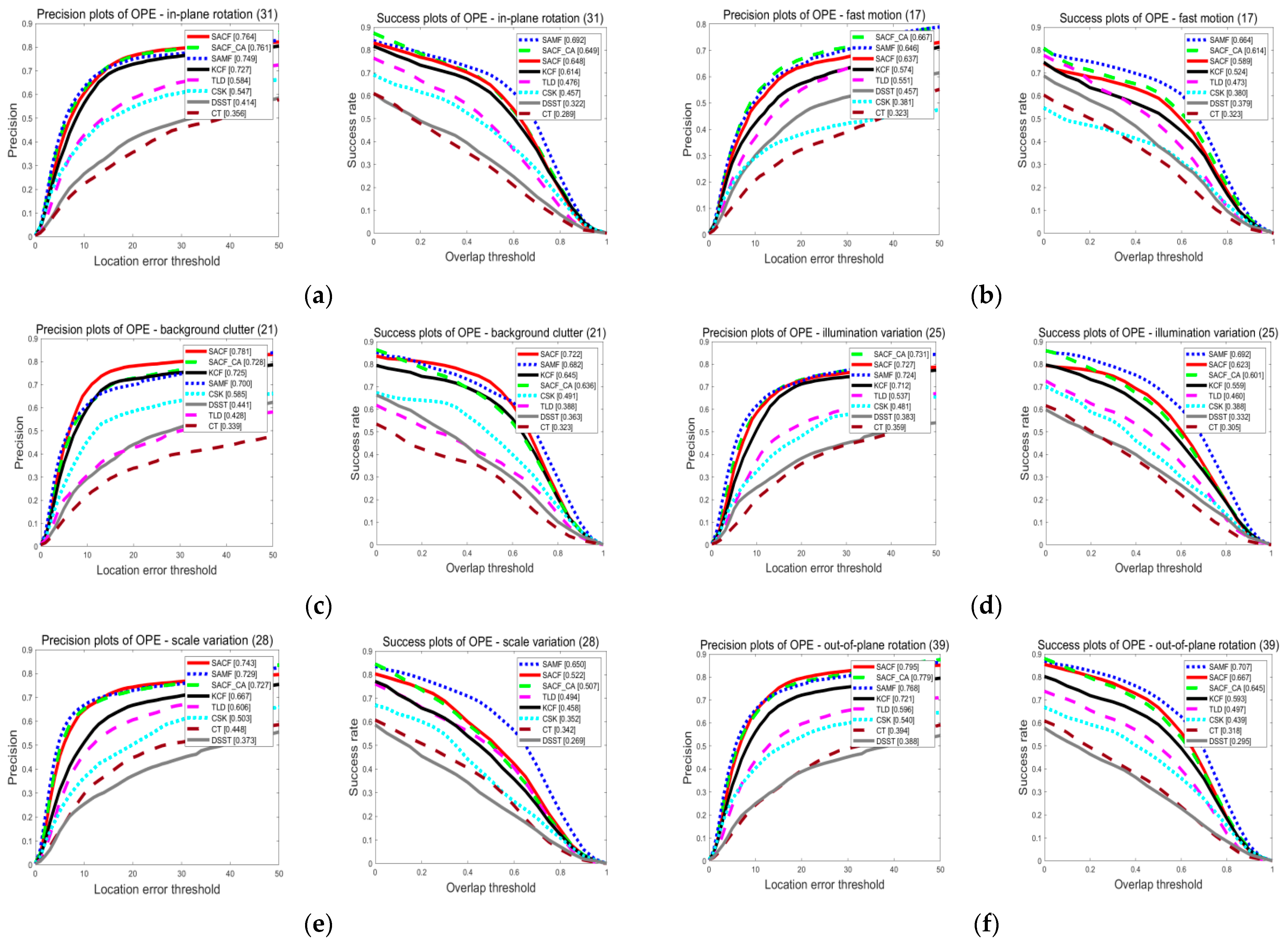
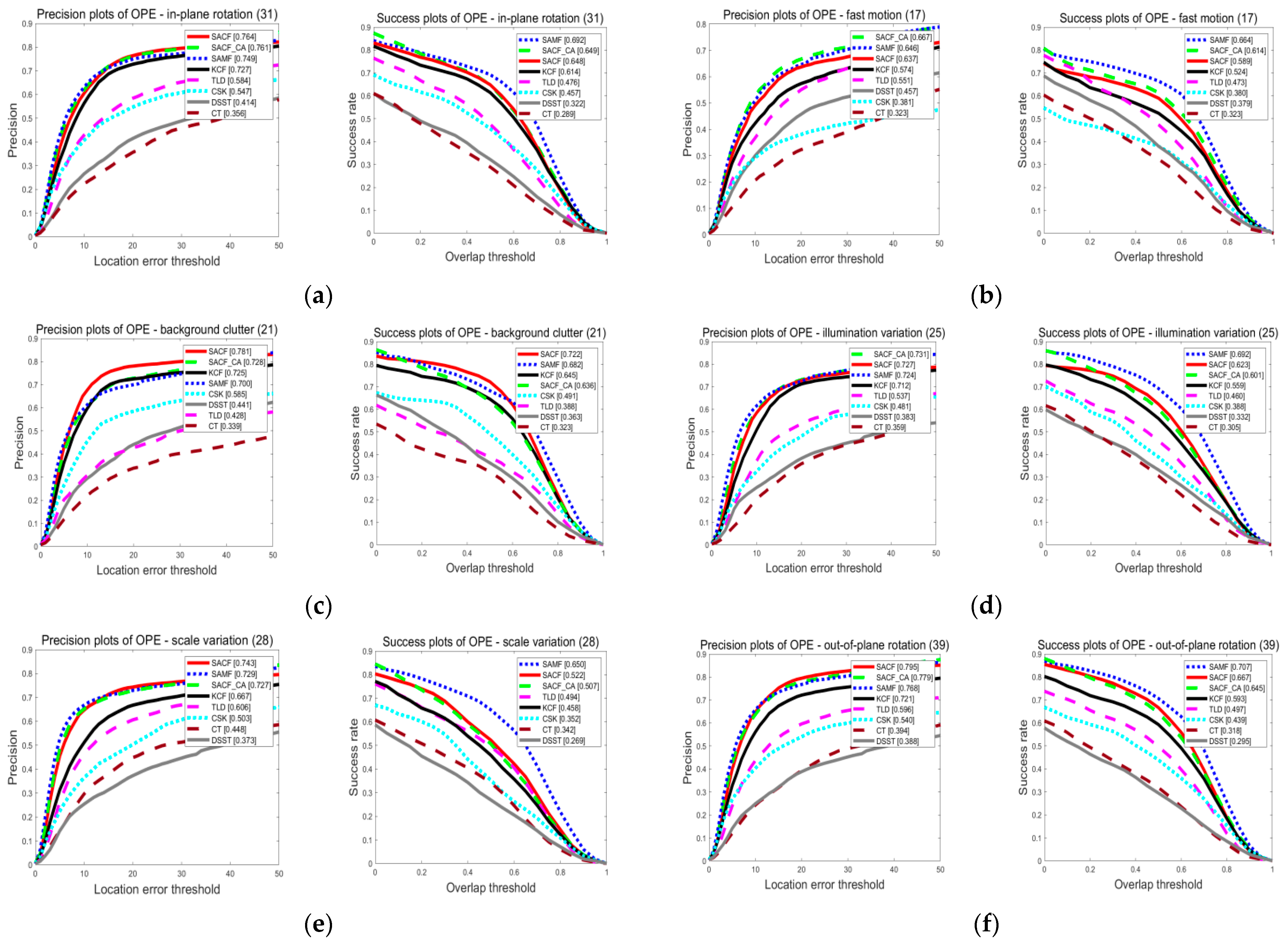
5.3. Quantitative Analysis
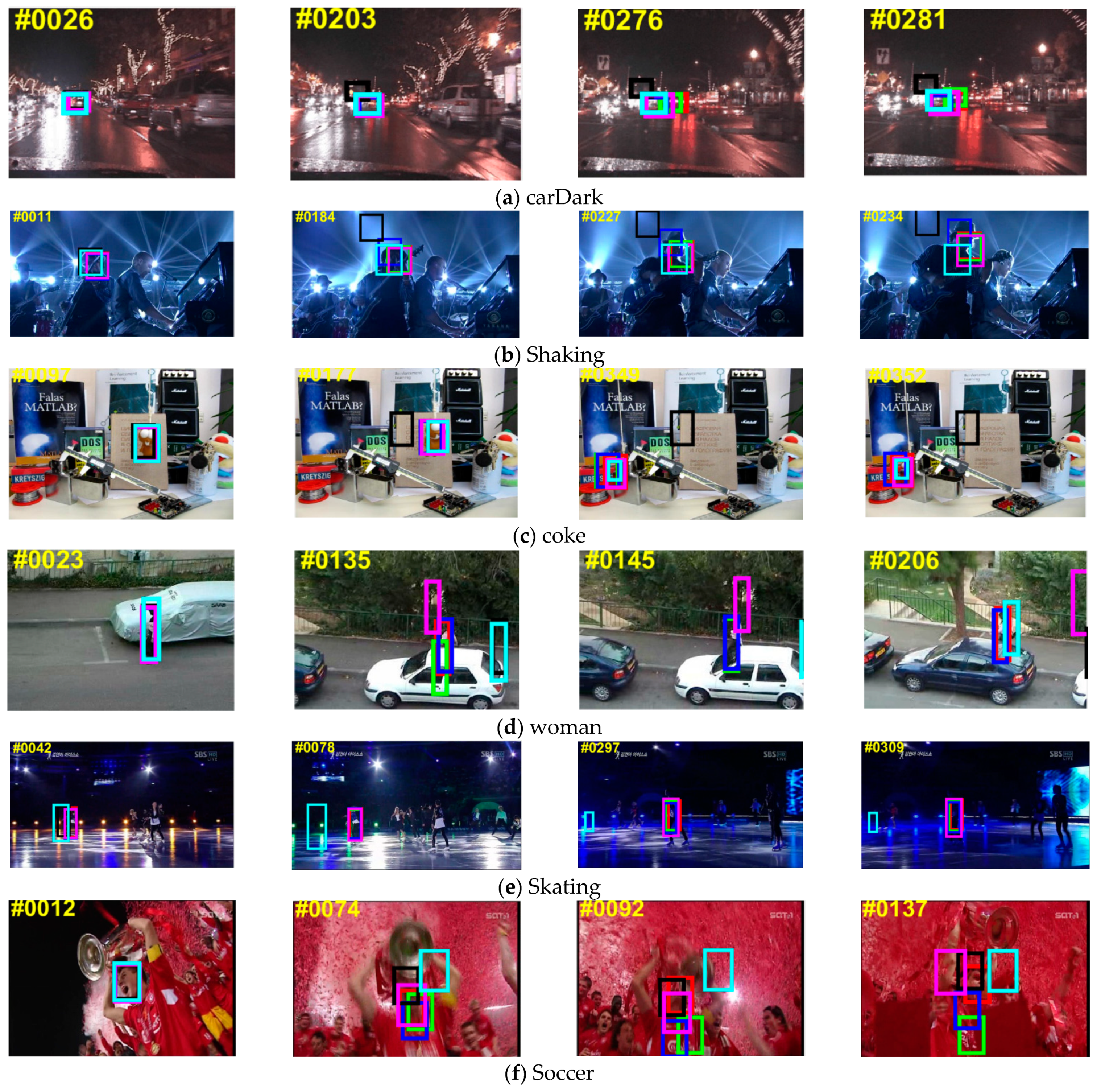
5.4. Qualitative Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chen, Z.; Hong, Z.; Tao, D. An experimental survey on correlation filter-based tracking. arXiv 2015, arXiv:150905520. [Google Scholar]
- Li, J.; Zhou, X.; Chan, S.; Chen, S. A novel video target tracking method based on adaptive convolutional neural network feature. J. Comput. Aided Comput. Graph. 2018, 30, 273–281. [Google Scholar] [CrossRef]
- Bolme, D.S.; Beveridge, J.R.; Draper, B.A.; Lui, Y.M. Visual object tracking using adaptive correlation filters. In Proceedings of the 2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Francisco, CA, USA, 13–18 June 2010; pp. 2544–2550. [Google Scholar] [CrossRef]
- Henriques, J.F.; Caseiro, R.; Martins, P.; Batista, J. Exploiting the circulant structure of tracking-by-detection with kernels. In European Conference on Computer Vision; Springer: Berlin/Heidelberg, Germany, 2012; pp. 702–715. [Google Scholar]
- Danelljan, M.; Khan, F.S.; Felsberg, M.; van de Weijer, J. Adaptive color attributes for real-time visual tracking. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 1090–1097. [Google Scholar]
- Henriques, J.F.; Caseiro, R.; Martins, P.; Batista, J. High-speed tracking with kernelized correlation filters. IEEE Trans. Pattern Anal. Mach. Intell. 2014, 37, 583–596. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Danelljan, M.; Hager, G.; Khan, F.S.; Felsberg, M. Learning spatially regularized correlation filters for visual tracking. In Proceedings of the 2015 IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015; pp. 4310–4318. [Google Scholar]
- Wu, Y.; Lim, J.; Yang, M.-H. Online Object Tracking: A Benchmark. In Proceedings of the 2013 IEEE Conference on Computer Vision and Pattern Recognition, Portland, OR, USA, 23–28 June 2013; pp. 2411–2418. [Google Scholar]
- Wang, N.; Shi, J.; Yeung, D.Y.; Jia, J. Understanding and diagnosing visual tracking systems. In Proceedings of the 2015 IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015; pp. 3101–3109. [Google Scholar]
- Salmond, D.; Birch, H. A particle filter for track-before-detect. In Proceedings of the 2001 American Control Conference (Cat. No. 01CH37148), Arlington, VA, USA, 25–27 June 2001; Volume 5, pp. 3755–3760. [Google Scholar] [CrossRef]
- Aidala, V.J. Kalman filter behavior in bearings-only tracking applications. IEEE Trans. Aerosp. Electron. Syst. 1979, AES-15, 29–39. [Google Scholar] [CrossRef]
- Jiang, N.; Wu, Y. Unifying spatial and attribute selection for distracter-resilient tracking. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 3502–3509. [Google Scholar]
- Jie, C.; Wei, L. Object tracking algorithm based on multi-feature fusion. J. Lanzhou Univ. Technol. Pap. 2011, 37, 80–84. [Google Scholar]
- Yang, Y. Research on Robust Visual Object Tracking Algorithm Based on Corelation Filter. Master’s Thesis, School of Computer Science & Technology, Huazhong University of Science and Technology, Wuhan, China, 2016; pp. 1–35. [Google Scholar]
- Danelljan, M.; Häger, G.; Khan, F.; Felsberg, M. Accurate scale estimation for robust visual tracking. In Proceedings of the British Machine Vision Conference 2014, Nottingham, UK, 1–5 September 2014. [Google Scholar] [CrossRef] [Green Version]
- Xiong, C.; Che, M.; Wang, R.; Yan, L. Adaptive model update via fusing peak-to-sidelobe ratio and mean frame difference for visual tracking. Acta Photonica Sin. 2018, 47, 910001. [Google Scholar] [CrossRef]
- Cheng, Y.H.; Wang, J. A motion image detection method based on the inter-frame difference method. Appl. Mech. Mater. 2014, 490, 1283–1286. [Google Scholar] [CrossRef]
- Yang, W.; Shen, Z.-K.; Li, Z.-Y. The application of difference method to dim point target detection in infrared images. In Proceedings of the National Aerospace and Electronics Conference (NAECON’94), Dayton, OH, USA, 23–27 May 1994; pp. 133–136. [Google Scholar] [CrossRef]
- Wang, M.; Liu, Y.; Huang, Z. Large margin object tracking with circulant feature maps. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 4021–4029. [Google Scholar]
- Matthias, M.; Neil, S.; Bernard, G. Context-aware correlation filter tracking. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 1387–1395. [Google Scholar]
 SACF,
SACF,  SACF_CA,
SACF_CA,  SAMF,
SAMF,  KCF,
KCF,  CSK,
CSK,  TLD.
TLD.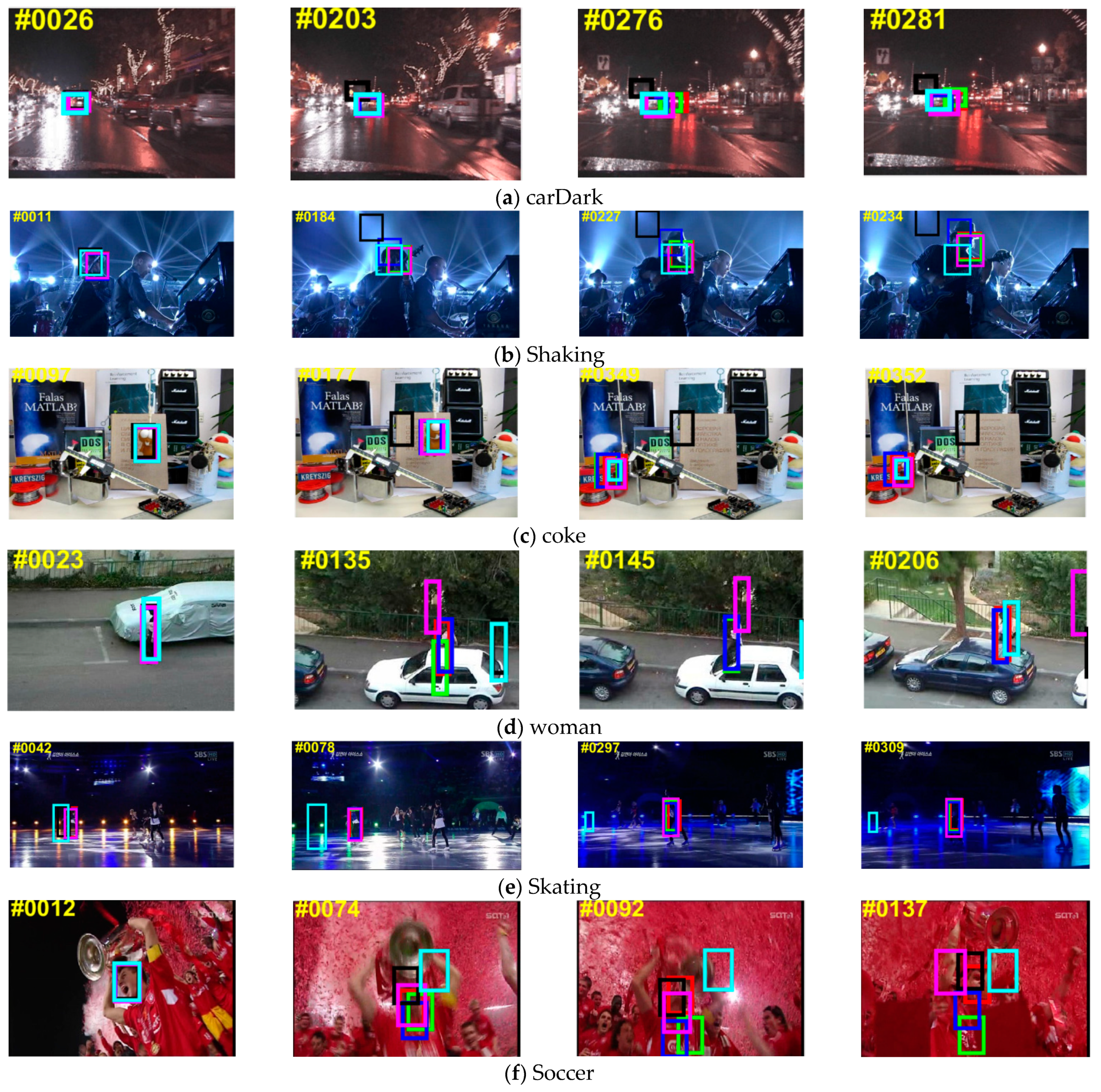

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
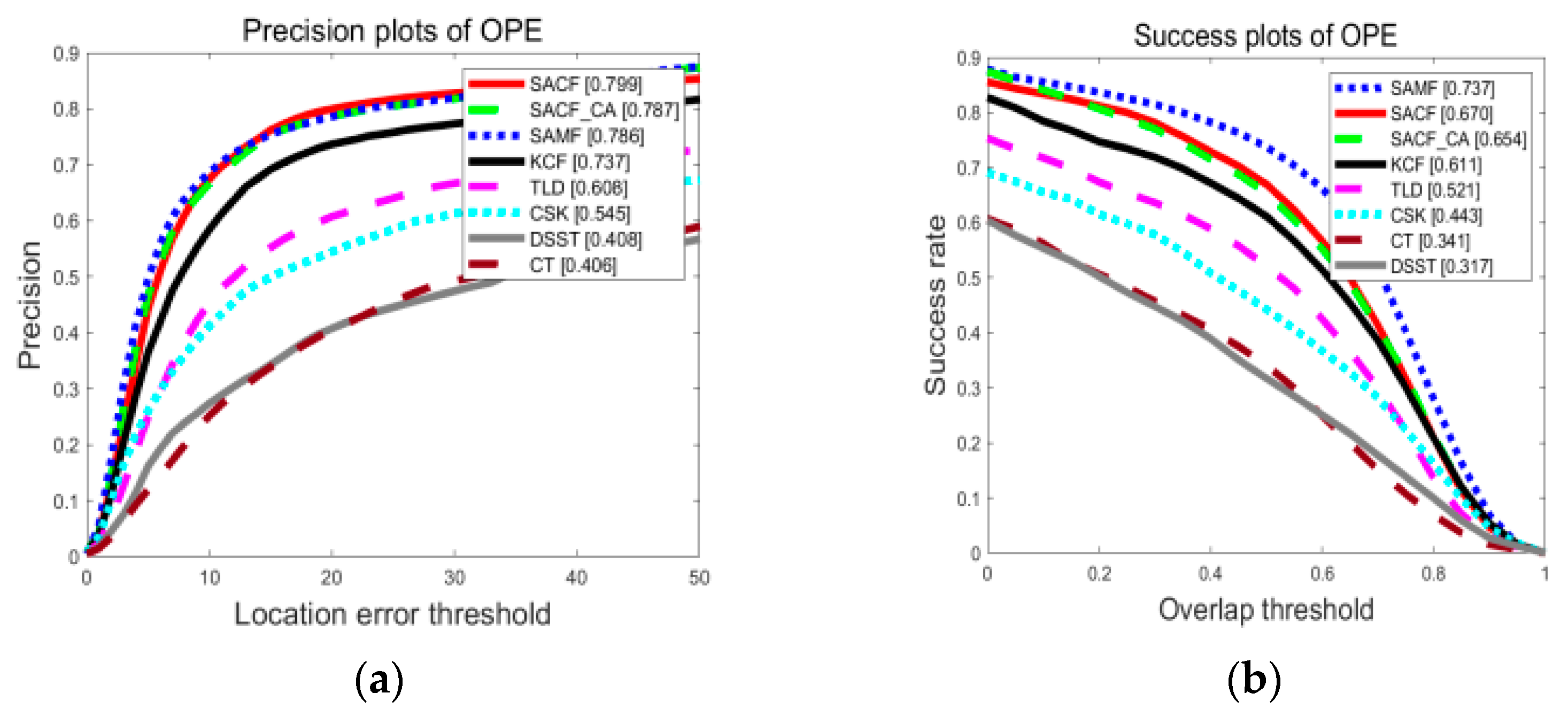
| Algorithm | CSK | KCF | DSST | SACF(ours) | SACF_CA(ours) | SAMF |
|---|---|---|---|---|---|---|
| Mean DP | 0.545 | 0.737 | 0.408 | 0.799 | 0.787 | 0.786 |
| Mean OP | 0.433 | 0.611 | 0.317 | 0.670 | 0.654 | 0.737 |
| Mean FPS | 297.765 | 169.72 | 63.854 | 70.138 | 43.062 | 15.346 |
| CSK | KCF | DSST | SACF(ours) | SACF_CA(ours) | SAMF | |
|---|---|---|---|---|---|---|
| IV | 0.481 | 0.712 | 0.383 | 0.727 | 0.731 | 0.724 |
| MB | 0.342 | 0.611 | 0.435 | 0.560 | 0.648 | 0.621 |
| SV | 0.503 | 0.667 | 0.373 | 0.743 | 0.727 | 0.729 |
| OV | 0.379 | 0.555 | 0.293 | 0.726 | 0.751 | 0.729 |
| LR | 0.411 | 0.379 | 0.360 | 0.475 | 0.616 | 0.520 |
| BC | 0.585 | 0.725 | 0.441 | 0.781 | 0.728 | 0.700 |
| OCC | 0.500 | 0.740 | 0.377 | 0.789 | 0.826 | 0.808 |
| IPR | 0.547 | 0.727 | 0.414 | 0.764 | 0.761 | 0.749 |
| OPR | 0.540 | 0.721 | 0.388 | 0.795 | 0.779 | 0.768 |
| DEF | 0.476 | 0.745 | 0.378 | 0.809 | 0.839 | 0.823 |
| FM | 0.381 | 0.574 | 0.457 | 0.637 | 0.667 | 0.646 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, X.; Tohti, T.; Ibrayim, M.; Hamdulla, A. Research on Anti-Occlusion Correlation Filtering Tracking Algorithm Based on Adaptive Scale. Information 2022, 13, 131. https://doi.org/10.3390/info13030131
Guo X, Tohti T, Ibrayim M, Hamdulla A. Research on Anti-Occlusion Correlation Filtering Tracking Algorithm Based on Adaptive Scale. Information. 2022; 13(3):131. https://doi.org/10.3390/info13030131
Chicago/Turabian StyleGuo, Xifeng, Turdi Tohti, Mayire Ibrayim, and Askar Hamdulla. 2022. "Research on Anti-Occlusion Correlation Filtering Tracking Algorithm Based on Adaptive Scale" Information 13, no. 3: 131. https://doi.org/10.3390/info13030131
APA StyleGuo, X., Tohti, T., Ibrayim, M., & Hamdulla, A. (2022). Research on Anti-Occlusion Correlation Filtering Tracking Algorithm Based on Adaptive Scale. Information, 13(3), 131. https://doi.org/10.3390/info13030131