
Effects of User Interfaces on Take-Over Performance: A Review of the Empirical Evidence


Abstract
1. Introduction
2. Materials and Methods
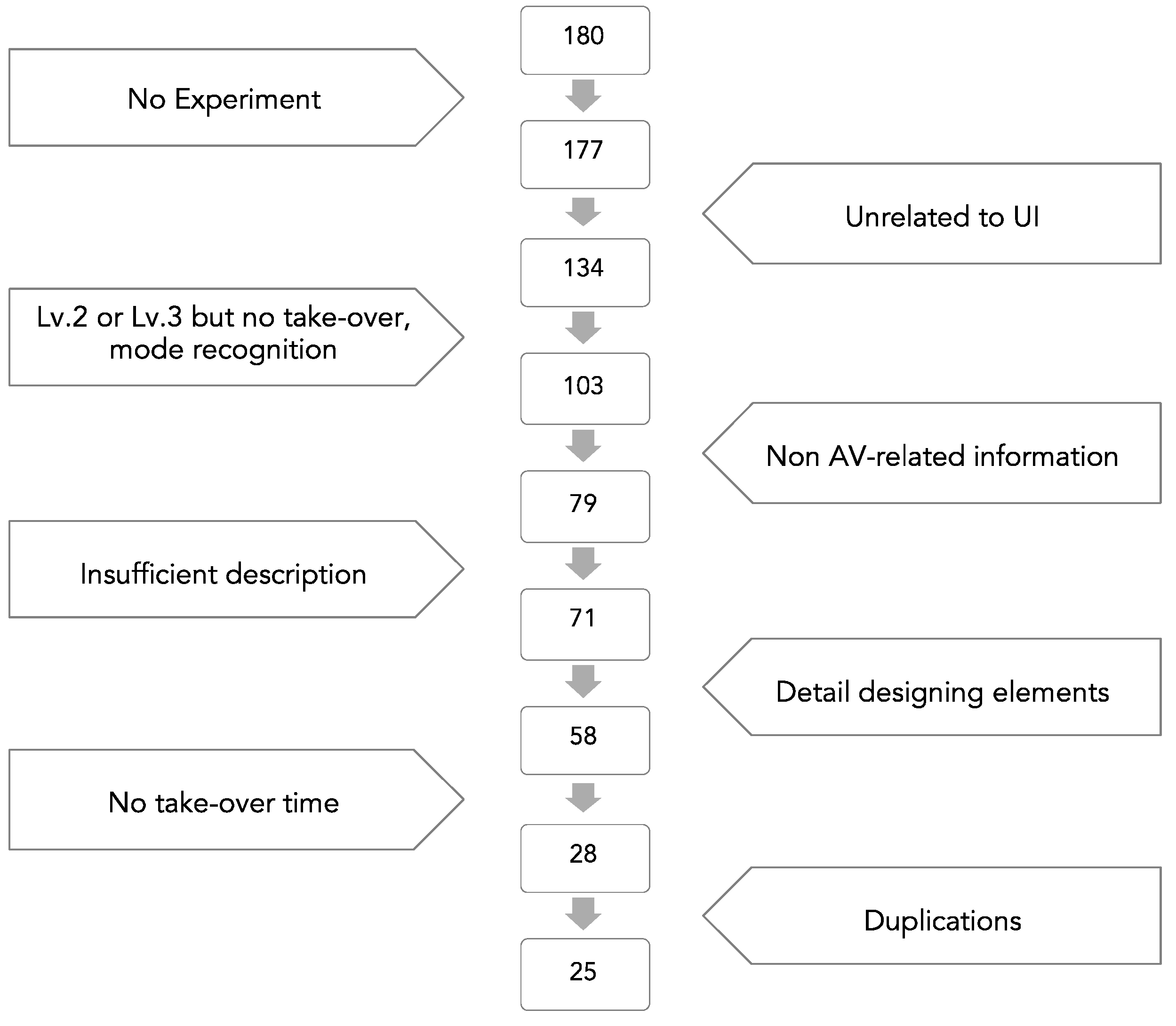
- The study covers SAE level 3 or higher (i.e., conditionally automatic driving, highly automated driving).
- The study includes transitions of control from automated mode to manual mode.
- The study includes experiments with human participants in a real vehicle or a driving simulator.
- The study includes a change in the user interface that carries the TOR, such that the effectiveness of the UI can be quantified.
- The study includes objective data on take-over time after take-over requests (where available we also analyzed take-over quality relevant for safety and we analyzed subjective data relevant for UI acceptance).
3. Results
3.1. TOR Channel and Simple Signals
3.2. Complex Signals and Contextual Information
3.2.1. Vehicle System Capability
3.2.2. Vehicle Action
3.2.3. Surrounding
3.2.4. TOR Additional Explanations
3.2.5. Urgency Level
3.2.6. Guiding Information
3.2.7. AR—Situation and Guiding information
4. Discussion
- Allow drivers to enjoy AV’s advantages while maintaining situation awareness (SA) during automated driving.
- Present clear alerts, allowing drivers to easily understand the situation and enhance SA quickly when resuming control.
- Guiding information improves manual driving performance after transitions.
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- SAE International. Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles (J3016); SAE International: Warrendale, PA, USA, 2018. [Google Scholar]
- Gold, C.; Körber, M.; Lechner, D.; Bengler, K. Taking over Control from Highly Automated Vehicles in Complex Traffic Situations. Hum. Factors 2016, 58, 642–652. [Google Scholar] [CrossRef] [PubMed]
- Jarosch, O.; Gold, C.; Naujoks, F.; Wandtner, B.; Marberger, C.; Weidl, G.; Schrauf, M. The Impact of Non-Driving Related Tasks on Take-over Performance in Conditionally Automated Driving—A Review of the Empirical Evidence. In Proceedings of the 9th Tagung Automatisiertes Fahren, Munich, Germany, 21–22 November 2019. [Google Scholar]
- Naujoks, F.; Befelein, D.; Wiedemann, K.; Neukum, A. A review of non-driving-related tasks used in studies on automated driving. In Advances in Intelligent Systems and Computing; Springer: Cham, Switzerland, 2018; pp. 525–537. [Google Scholar]
- Merat, N.; Jamson, A.H.; Lai, F.C.; Daly, M.; Carsten, O.M. Transition to Manual: Driver Behaviour when Resuming Control from a Highly Automated Vehicle; Elsevier Ltd.: Amsterdam, The Netherlands, 2014; pp. 274–282. [Google Scholar]
- Endsley, M.R. Toward a Theory of Situation Awareness in Dynamic Systems. Hum. Factors 1995, 37, 32–64. [Google Scholar] [CrossRef]
- Mok, B.K.-J.; Johns, M.; Lee, K.J.; Ive, H.P.; Miller, D.; Ju, W. Timing of unstructured transitions of control in automated driving. In Proceedings of the IEEE Intelligent Vehicles Symposium, Seoul, Korea, 28 June–1 July 2015; Institute of Electrical and Electronics Engineers Inc.: New York, NY, USA, 2015. [Google Scholar]
- Zhang, B.; de Winter, J.; Varotto, S.; Happee, R.; Martens, M. Determinants of take-over time from automated driving: A meta-analysis of 129 studies. Transp. Res. Part F Traffic Psychol. Behav. 2019, 64, 285–307. [Google Scholar] [CrossRef]
- Weaver, B.W.; DeLucia, P.R. A Systematic Review and Meta-Analysis of Takeover Performance During Conditionally Automated Driving. Hum. Factors 2020. [Google Scholar] [CrossRef] [PubMed]
- McDonald, A.D.; Alambeigi, H.; Engström, J.; Markkula, G.; Vogelpohl, T.; Dunne, J.; Yuma, N. Toward Computational Simulations of Behavior During Automated Driving Takeovers: A Review of the Empirical and Modeling Literatures. Hum. Factors 2019, 61, 642–688. [Google Scholar] [CrossRef] [PubMed]
- Eriksson, A.; Stanton, N.A. Takeover Time in Highly Automated Vehicles: Noncritical Transitions to and From Manual Control. Hum. Factors 2017, 59, 689–705. [Google Scholar] [CrossRef] [PubMed]
- Mirnig, A.G.; Gärtner, M.; Laminger, A.; Meschtscherjakov, A.; Trösterer, S.; Tscheligi, M.; McCall, R.; McGee, F. Control transition interfaces in semiautonomous vehicles: A categorization framework and literature analysis. In Proceedings of the AutomotiveUI 2017—9th International ACM Conference on Automotive User Interfaces and Interactive Vehicular Applications, Oldenburg, Germany, 24–27 September 2017; Association for Computing Machinery, Inc.: New York, NY, USA, 2017; pp. 209–220. [Google Scholar]
- Kerschbaum, P.; Lorenz, L.; Bengler, K. Highly Automated Driving With a Decoupled Steering Wheel; Highly Automated Driving With a Decoupled Steering Wheel. In Proceedings of the Human Factors and Ergonomics Society 58th Annual Meeting, Chicago, IL, USA, 27–31 October 2014; SAGE Publications: Los Angeles, CA, USA, 2014. [Google Scholar]
- Gold, C.; Damböck, D.; Lorenz, L.; Bengler, K. Take over! How long does it take to get the driver back into the loop? In Proceedings of the Human Factors and Ergonomics Society 57th Annual Meeting, San Diego, CA, USA, 30 September–4 October 2013; SAGE Publications: Los Angeles, CA, USA, 2013; pp. 1938–1942. [Google Scholar]
- Karray, F.; Alemzadeh, M.; Saleh, J.A.; Arab, M.N. Human-Computer Interaction: Overview on State of the Art. Int. J. Smart Sens. Intell. 2008, 1, 137–159. [Google Scholar] [CrossRef]
- Borojeni, S.S.; Chuang, L.; Heuten, W.; Boll, S. Assisting drivers with ambient take-over requests in highly automated driving. In Proceedings of the AutomotiveUI 2016—8th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Ann Arbor, MI, USA, 24–26 October 2016. [Google Scholar]
- Cohen-Lazry, G.; Borowsky, A.; Oron-Gilad, T. The Effects of Continuous Driving-Related Feedback on Drivers’ Response to Automation Failures. In Proceedings of the Human Factors and Ergonomics Society Annual Meeting, Austin, TX, USA, 9–13 October 2017; pp. 1980–1984. [Google Scholar]
- Cohen-Lazry, G.; Katzman, N.; Borowsky, A.; Oron-Gilad, T. Directional tactile alerts for take-over requests in highly-automated driving. Transp. Res. Part F Traffic Psychol. Behav. 2019, 65, 217–226. [Google Scholar] [CrossRef]
- Eriksson, A.; Petermeijer, S.M.; Zimmermann, M.; De Winter, J.C.F.; Bengler, K.J.; Stanton, N.A. Rolling Out the Red (and Green) Carpet: Supporting Driver Decision Making in Automation-to-Manual Transitions. IEEE Trans. Hum. Mach. Syst. 2019, 49, 20–31. [Google Scholar] [CrossRef]
- Forster, Y.; Naujoks, F.; Neukum, A.; Huestegge, L. Driver compliance to take-over requests with different auditory outputs in conditional automation. Accid. Anal. Prev. 2017, 109, 18–28. [Google Scholar] [CrossRef] [PubMed]
- Helldin, T.; Falkman, G.; Riveiro, M.; Davidsson, S. Presenting system uncertainty in automotive UIs for supporting trust calibration in autonomous driving. In Proceedings of the 5th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, AutomotiveUI 2013, Eindhoven, The Netherlands, 28–30 October 2013; ACM: New York, NY, USA, 2013. [Google Scholar]
- Köhn, T.; Gottlieb, M.; Schermann, M.; Krcmar, H. Improving take-over quality in automated driving by interrupting non-driving tasks. In Proceedings of the 24th International Conference on Intelligent User Interfaces, Los Angles, CA, USA, 16–20 March 2019; ACM: New York, NY, USA, 2019. [Google Scholar]
- Kunze, A.; Summerskill, S.J.; Marshall, R.; Filtness, A.J. Automation transparency: Implications of uncer-tainty communication for human-automation interaction and interfaces. Ergonomics 2019, 62, 345–360. [Google Scholar] [CrossRef] [PubMed]
- Langlois, S.; Soualmi, B. Augmented reality versus classical HUD to take over from automated driving: An aid to smooth reactions and to anticipate maneuvers. In Proceedings of the IEEE Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 1–4 November 2016. [Google Scholar]
- Lindemann, P.; Muller, N.; Rigolll, G. Exploring the use of augmented reality interfaces for driver assistance in short-notice takeovers. In Proceedings of the 2019 IEEE Intelligent Vehicles Symposium (IV), Paris, France, 9–12 June 2019. [Google Scholar]
- Lorenz, L.; Kerschbaum, P.; Schumann, J. Designing take over scenarios for automated driving: How does augmented reality support the driver to get back into the loop? In Proceedings of the Human Factors and Ergonomics Society 58th Annual Meeting, Chicago, IL, USA, 27–31 October 2014; SAGE Publications: Los Angeles, CA, USA, 2014. [Google Scholar]
- Melcher, V.; Rauh, S.; Diederichs, F.; Widlroither, H.; Bauer, W. Take-Over Requests for Automated Driv-ing. Procedia Manuf. 2015, 3, 2867–2873. [Google Scholar] [CrossRef]
- Naujoks, F.; Mai, C.; Neukum, A. The Effect of Urgency of Take-Over Requests During Highly Automated Driving Under Distraction Conditions. In Proceedings of the 5th International Conference on Applied Human Factors and Ergonomics AHFE, Krakow, Poland, 19–23 July 2014. [Google Scholar]
- Petermeijer, S.; Cieler, S.; De Winter, J. Comparing spatially static and dynamic vibrotactile take-over re-quests in the driver seat. Accid. Anal. Prev. 2017, 99, 218–227. [Google Scholar] [CrossRef] [PubMed]
- Petermeijer, S.; Doubek, F.; De Winter, J. Driver response times to auditory, visual, and tactile take-over requests: A simulator study with 101 participants. In Proceedings of the 2017 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Banff, AB, Canada, 5–8 October 2017. [Google Scholar]
- Politis, I.; Brewster, S.A.; Pollick, F.E. Language-based multimodal displays for the handover of control in autonomous cars. In Proceedings of the 7th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Nottingham, UK, 1–3 September 2015; ACM: New York, NY, USA, 2015. [Google Scholar]
- Razin, P.; Matysiak, A.; Kruszewski, M.; Niezgoda, M. The impact of the interfaces of the driving automation system on a driver with regard to road traffic safety. In Proceedings of the 12th International Road Safety Conference GAMBIT 2018, Gdansk, Poland, 12–13 April 2018. [Google Scholar]
- Roche, F.; Brandenburg, S. Should the urgency of auditory-tactile takeover requests match the criticality of takeover situations? In Proceedings of the IEEE Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018. [Google Scholar]
- Roche, F.; Somieski, A.; Brandenburg, S. Behavioral Changes to Repeated Takeovers in Highly Automated Driving: Effects of the Takeover-Request Design and the Nondriving-Related Task Modality. Hum. Factors 2019, 61, 839–849. [Google Scholar] [CrossRef] [PubMed]
- Telpaz, A.; Rhindress, B.; Zelman, I.; Tsimhoni, O. Haptic Seat for Automated Driving: Preparing the Driver to Take Control Effectively. In Proceedings of the 7th International Conference on Automotive User Interfaces and Interactive Vehicular Applications; Automotive UI 2015, Nottingham, UK, 1–3 September 2015; ACM Publishing: New York, NY, USA, 2015. [Google Scholar]
- Beukel, A.P.V.D.; van der Voort, M.C.; Eger, A.O. Supporting the changing driver’s task: Exploration of interface designs for supervision and intervention in automated driving. Transp. Res. Part F Traffic Psychol. Behav. 2016, 43, 279–301. [Google Scholar] [CrossRef]
- White, H.; Large, D.R.; Salanitri, D.; Burnett, G.; Lawson, A.; Box, E. Rebuilding Drivers’ Situation Awareness During Take-Over Requests in Level 3 Automated Cars. In Proceedings of the Contemporary Ergonomics & Human Factors, Stratford-upon-Avon, UK, 29 April–1 May 2019. [Google Scholar]
- Wintersberger, P.; Riener, A.; Schartmüller, C.; Frison, A.; Weigl, K. Let me finish before I take over: Towards attention aware device integration in highly automated vehicles. In Proceedings of the 10th International ACM Conference on Automotive User Interfaces and Interactive Vehicular Applications, AutomotiveUI 2018, Toronto, ON, Canada, 23–25 September 2018; ACM: New York, NY, USA, 2018. [Google Scholar]
- Yang, Y.; Karakaya, B.; Dominioni, G.C.; Kawabe, K.; Bengler, K. An HMI Concept to Improve Driver’s Visual Behavior and Situation Awareness in Automated Vehicle. In Proceedings of the IEEE Conference on Intelligent Transportation Systems, Proceedings (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 650–655. [Google Scholar]
- Yoon, S.H.; Kim, Y.W.; Ji, Y.G. The effects of takeover request modalities on highly automated car control transitions. Accid. Anal. Prev. 2019, 123, 150–158. [Google Scholar] [CrossRef] [PubMed]
- Seppelt, B.D.; Victor, T.W. Potential Solutions to Human Factors Challenges in Road Vehicle Automation. In Road Vehicle Automation 3; Springer International Publishing: Cham, Switzerland, 2016; pp. 131–148. [Google Scholar]
- McGuirl, J.M.; Sarter, N.B. Supporting trust calibration and the effective use of decision aids by presenting dynamic system confidence information. Hum. Factors J. Hum. Factors Ergon. Soc. 2006, 48, 656–665. [Google Scholar] [CrossRef] [PubMed]
- Ekman, F.; Johansson, M. Creating Appropriate Trust for Autonomous Vehicles. A Framework For HMI Design. IEEE Trans. Hum.-Mach. Syst. 2015, 48, 95–101. [Google Scholar] [CrossRef]
- Heydra, C.G.; Jansen, R.J.; Van Egmond, R. Auditory Signal Design for Automatic Number Plate Recognition System. In Proceedings of the Chi Sparks 2014 Conference, The Hague, The Netherlands, 3 April 2014. [Google Scholar]
- Pauzie, A. Head up Display in Automotive: A New Reality for the Driver; Springer: Cham, Switzerland, 2015; pp. 505–516. [Google Scholar]
- Miller, D.; Johns, M.; Mok, B.; Gowda, N.; Sirkin, D.; Lee, K.; Ju, W. Behavioral Measurement of Trust in Automation. In Proceedings of the Human Factors and Ergonomics Society Annual Meeting, Prague, Czech Republic, 19–23 September 2016; pp. 1849–1853. [Google Scholar]
- Norman, D.A. The ‘problem’ with automation: Inappropriate feedback and interaction, not ‘over-automation’. Philos. Trans. R. Soc. Lond. Ser. B Biol. Sci. 1990, 327, 585–593. [Google Scholar]
- Yang, Y.; Götze, M.; Laqua, A.; Dominioni, G.C.; Kawabe, K.; Bengler, K. A method to improve driver’s situation awareness in automated driving. In Proceedings of the 2017 Annual Meeting of the Human Factors and Ergonomics Society Europe Chapter, Rome, Italy, 28–30 September 2017. [Google Scholar]
- Yoon, S.H.; Ji, Y.G. Non-driving-related tasks, workload, and takeover performance in highly automated driving contexts. Transp. Res. Part F Traffic Psychol. Behav. 2019, 60, 620–631. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
| Category | Definition |
|---|---|
| Take over time * | |
| First-gaze time | Driver redirects gaze to the forward road |
| Hands-on time | Driver has hands on the steering wheel |
| Press button time | Driver presses a specific button |
| Intervention time | Driver initiates the driving action such as pressing the brake pedal or turning the steering wheel >2 degree |
| Driving task time | Driver finishes a driving task such as a lane change |
| Take-over quality | |
| Time to collision | Minimum time towards a forward hazard (minimum distance divided by relative speed) |
| Lane positioning | Vehicle lateral movement deviation (Standard deviation of lane position) |
| Lateral position change | Maximum lateral acceleration/Steering wheel angle |
| Longitudinal position change | Maximum longitudinal acceleration/Average deceleration |
| No. | Study | N | NDRTs | UI Category | Dependent Factor |
|---|---|---|---|---|---|
| 1 | (Borojeni, Chuang et al. 2016) [16] | 21 | Tablet 1-back task | Guiding— Driving support | Intervention time |
| 2 | (Cohen-Lazry, Borowsky et al. 2017) [17] | 16 | Game | Surrounding, Vehicle—Action | Intervention time |
| 3 | (Cohen-Lazry et al. 2019) [18] | 27 | Game | Guiding— Driving support | Intervention time |
| 4 | (Eriksson, Petermeijer et al. 2019) [19] | 25 | Game (tablet) | Guiding— Driving support (AR) | First-gaze time, Hands-on time, Intervention time, Driving task time |
| 5 | (Forster, Naujoks et al. 2017) [20] | 17 | Reading a magazine | Situation—Additional explanations | Frist-gaze time, Hands-on time, Press button time |
| 6 | (Helldin, Falkman et al. 2013) [21] | 57 | Read paper of eat sweets | Vehicle— System capability | Intervention time |
| 7 | (Köhn, Gottlieb et al. 2019) [22] | 53 | Passive task (Watching) Active task (Little man task) | Surrounding | Intervention time |
| 8 | (Kunze et al. 2019) [23] | 34 | Searching (tablet) | Vehicle— System capability | Intervention time, Lateral position change, Longitudinal position change |
| 9 | (Langlois and Soualmi 2016) [24] | 26 | Video Game | Guiding— Driving support (AR) | Hands-on time, Press button time, Intervention time, Lateral position change Longitudinal position change |
| 10 | (Lindemann, Muller et al. 2019) [25] | 18 | Game (tablet) | Guiding— Driving support (AR) | Intervention time, Lane positioning, Lateral position change |
| 11 | (Lorenz, Kerschbaum et al. 2014) [26] | 46 | Surrogate Reference Task (Center console) | Guiding— Driving support (AR) | First-gaze time, Hands-on time Intervention time, Lane positioning Lateral position change, Longitudinal position change |
| 12 | (Melcher, Rauh et al. 2015) [27] | 44 | Game (smart phone) | Simple information | Intervention time |
| 13 | (Naujoks, Mai et al. 2014) [28] | 16 | Reading magazines | Simple information | Hands-on time, Lane positioning, Lateral position change |
| 14 | (Petermeijer, Cieler et al. 2017) [29] | 18 | N-back task | Simple information | Hands-on time, Intervention time, Driving task time, Lane positioning, Lateral position change |
| 15 | (Petermeijer, Doubek et al. 2017) [30] | 101 | Reading/Calling/ Watching | Simple information | First-gaze time, Intervention time, Driving task time, Lane positioning, Lateral position change |
| 16 | (Politis, Brewster et al. 2015) [31] | 21 | Game (tablet) | Simple information, Situation— Urgency level | Press button time, Lane positioning |
| 17 | (Razin, Matysiak et al. 2018) [32] | 30 | - | Simple information | Intervention time |
| 18 | (Roche and Brandenburg 2018) [33] | 52 | Game (tablet) | Situation— Urgency level | Intervention time |
| 19 | (Roche, Somieski et al. 2019) [34] | 40 | Game (tablet) | Simple information | Intervention time, Time to collisionLane positioning, Lateral position change |
| 20 | (Telpaz, Rhindress et al. 2015) [35] | 26 | Texting | Guiding—Driving support | Intervention time, Driving task time |
| 21 | (van den Beukel, van der Voort et al. 2016) [36] | 37 | Watching, Reading | Simple information Situation— Additional explanations | Intervention time, Time to collision |
| 22 | (White, Large et al. 2019) [37] | 49 | Chosen activities | Vehicle—System capability, Guiding—Transition support | Intervention time, Lane positioning |
| 23 | (Wintersberger, Riener et al. 2018) [38] | 18 | Texting | Simple information | Intervention time, Time to collision |
| 24 | (Yang et al. 2018) [39] | 50 | Smart phone | Surrounding Vehicle—Action | Intervention time, Time to collision, Lane positioning Lateral position change, Longitudinal position change |
| 25 | (Yoon, Kim et al. 2019) [40] | 20 | No-task/Calling/Smart phone/Video watching | Simple information | Hands-on time, Press button time |
| Study | NDRT | Dependent Factor | Visual | Auditory | Tactile | A + V | A + T | T + V | A + T+V | Significant Difference |
|---|---|---|---|---|---|---|---|---|---|---|
| (Petermeijer, Doubek et al. 2017) [30] | Reading/Calling/Watching | First-gaze time | 1.94 | 1.57 | 1.44 | A < V/T < V | ||||
| Intervention time | 2.29 | 1.54 | 1.47 | A <V/T < V | ||||||
| (Politis, Brewster et al. 2015) [31] | Tablet Game | Mean Press button time | 6.91 | 2.24 | 2.85 | 2.12 | 2.32 | 2.37 | 2.21 | A,AT,AV,TV,ATV < T < V |
| (Yoon, Kim et al. 2019) [40] | Watching | Hands on time | 1.84 | 1.61 | 1.64 | 1.3 | 1.3 | 1.54 | 1.26 | A,T,AV,AT,VT,AVT < V |
| Press button time | 2.42 | 2.23 | 2.18 | 1.97 | 2.05 | 1.88 | 1.95 | A,AV,AT,VT,AVT < V | ||
| (Naujoks, Mai et al. 2014) [28] | Reading | Hands on time | 6.19 | 2.29 | AV < V | |||||
| (Razin, Matysiak et al. 2018) [32] | - | Intervention time | 9.46 | 3.84 | 5.64 | No mention but significant | ||||
| (Roche, Somieski et al. 2019) [34] | Tablet game | Intervention time | 3.24 | 4.61 | A < AV | |||||
| (van den Beukel, van der Voort et al. 2016) [36] | Watching/Reading | Intervention time | 4.32 | 4.88 (Visual: icon) | 5.31 (Visual:light) | A < AV |
| When | Information | Example | Related Study |
|---|---|---|---|
| Automated driving | Vehicle system capability | - Display the sensor detection accuracy level | [21,23,37] |
| Vehicle action | - Alert “Increasing speed to 130 km/h” - Display intended lane change direction | [17,39] | |
| Surrounding | - Display the surrounding view or hazards - Alert “Vehicle approaching from behind” | [17,22,39] | |
| With TOR | Additional explanations | - Alert “Unclear lane ahead, please take over soon“ - Display ‘Steering wheel holding’ symbol with TOR - Display a danger point motivating the TOR in AR | [20,36] [19,24,25,26] |
| Urgency level | - High urgency: Alert “Danger! Collision Imminent, You have control!” - Low urgency: Alert “Notice! Toll ahead, Want to take over?” | [31,33] | |
| Right after TOR | Transition support | - Display “Check for hazards” message | [37] |
| Driving support | - Directional steering light indicating lane change direction - Display lane to be changed in AR | [16,35] [19,24,25,26] |
| AR UI | Present the Danger | Guide the Manual Driving | |
|---|---|---|---|
| (Lorenz, Kerschbaum et al. 2014) [26] | AR Red | O | - |
| AR Green | - | O (Carpet trajectory) | |
| (Langlois and Soualmi 2016) [24] | AR | - | O (Arrow direction) |
| (Lindemann, Muller et al. 2019) [25] | AR | O | O (Carpet trajectory) |
| (Eriksson, Petermeijer et al. 2019) [19] | Sphere condition | O | - |
| Carpet condition | - | O (Available road) | |
| Arrow condition | - | O (Arrow direction) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, S.; van Egmond, R.; Happee, R. Effects of User Interfaces on Take-Over Performance: A Review of the Empirical Evidence. Information 2021, 12, 162. https://doi.org/10.3390/info12040162
Kim S, van Egmond R, Happee R. Effects of User Interfaces on Take-Over Performance: A Review of the Empirical Evidence. Information. 2021; 12(4):162. https://doi.org/10.3390/info12040162
Chicago/Turabian StyleKim, Soyeon, René van Egmond, and Riender Happee. 2021. "Effects of User Interfaces on Take-Over Performance: A Review of the Empirical Evidence" Information 12, no. 4: 162. https://doi.org/10.3390/info12040162
APA StyleKim, S., van Egmond, R., & Happee, R. (2021). Effects of User Interfaces on Take-Over Performance: A Review of the Empirical Evidence. Information, 12(4), 162. https://doi.org/10.3390/info12040162