
Time-Optimal Gathering under Limited Visibility with One-Axis Agreement †



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Model and Preliminaries
- Look: For each robot that is within the viewing range of , can observe the position of on the plane. Robot also knows its own position;
- Compute: In any cycle, robot may perform an arbitrary computation using only the positions observed during the “look” portion of that cycle. This includes determination of a (possibly) new position for for the start of next cycle;
- Move: At the end of the cycle, robot moves to its new position.
3. Time Algorithm for the Grid
3.1. The Algorithm
| Algorithm 1: The algorithm for gathering on a grid (under both axis agreement) | |
| /* In every LCM cycle, each robot does the following when it | |
| activates: */ | |
| /* Look: */ | |
| 1 | current position of robot in the grid graph G; |
| 2 | snapshot of the positions of other robots within the viewing range of ; |
| /* Compute: */ | |
| 3 | square area for robot ; |
| 4 | horizontal and vertical lines passing through , respectively; |
| 5 | horizontal lines parallel to and passing through and |
| , respectively; | |
| 6 | vertical lines parallel to and passing through and |
| , respectively; | |
| 7 | destination point for to move; |
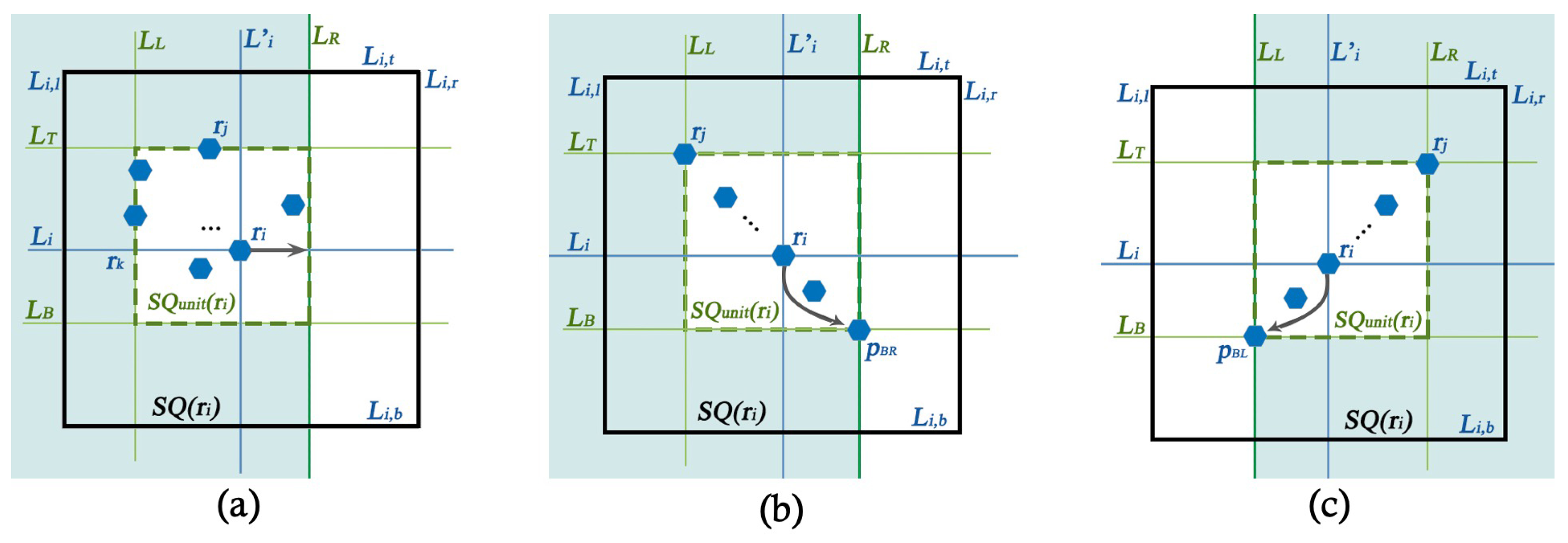
| 8 | If sees no other robot in any of the neighboring grid points on then |
| 9 | terminates; |
| 10 | Else if sees at least a robot in in North of then |
| 11 | keeps waiting; ; // do nothing |
| /* Check the following two conditions for a diagonal hop. */ | |
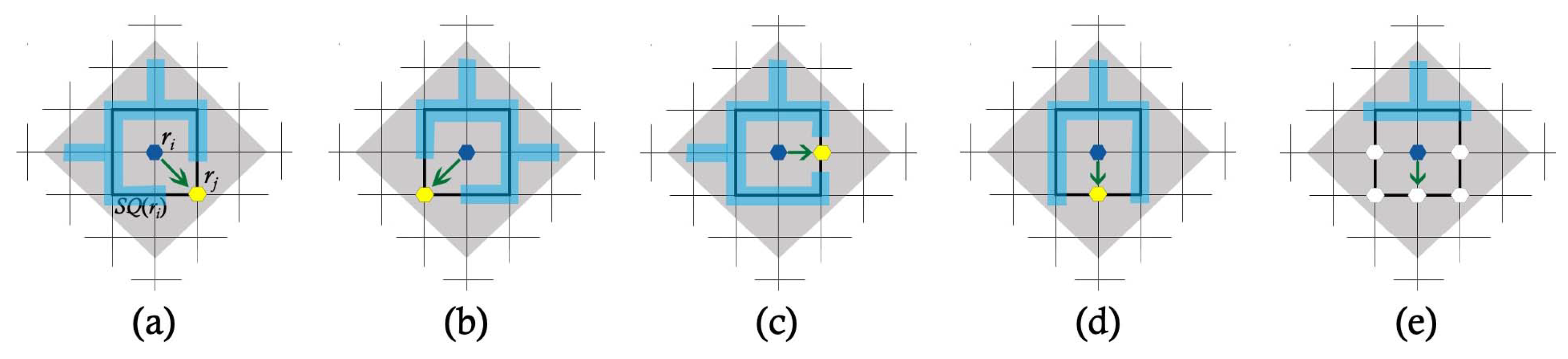
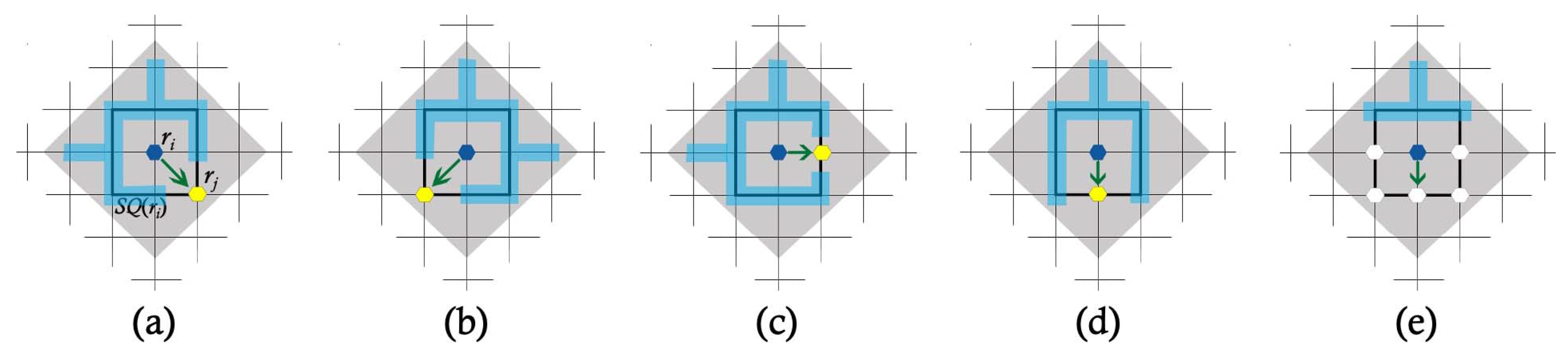
| 12 | Else if sees no robot in on or West of (except at its position), and sees |
| at least a robot on that is part of in South of then //Figure 3a | |
| 13 | ; |
| 14 | Else if sees no robot in on or East of (except at its position), and sees |
| at least a robot on that is part of in South of then //Figure 3b | |
| 15 | ; |
| /* Check the following condition for a horizontal hop. */ | |
| 16 | Else if sees at least a robot on and sees no other robot in , |
| except on in the East then // Figure 3c | |
| 17 | ; |
| 18 | Else// Check either of the following two conditions for a vertical |
| hop. | |
| 19 | If sees no robot in in North of and sees at least a robot on in |
| South in then// Figure 3d | |
| 20 | |
| 21 | Else if sees no robot in in North of and sees at least one robot each |
| on two lines and on or South of in then //Figure 3e | |
| 22 | ; |
| /* Move: */ | |
| 23 | moves to ; |
| /*Note:Each robot reaches a grid point after the completion of a | |
| cycle. But a robot may not necessarily see other robot(s) (which | |
| is/are moving) only at grid points since the robots may perform | |
| their LCM cycles at arbitrary times due to the setting. | |
| */ | |
3.2. Analysis of the Algorithm
4. Time Algorithm for the Euclidean Plane
4.1. The Algorithm
4.1.1. Overview of the Patterns
| Algorithm 2: The algorithm for gathering in the Euclidean plane | |
| /* In every LCM cycle, each robot does the following when it become | |
| activated: */ | |
| /* Look: */ | |
| 1 | current position of robot in the plane; |
| 2 | snapshot of the positions of other robots within the viewing range of ; |
| /* Compute: */ | |
| 3 | square area for robot ; |
| 4 | unit area for ; |
| 5 | horizontal and vertical lines passing through , respectively; |
| 6 | top, bottom, right and left boundary lines of , respectively; |
| 7 | top, bottom, right and left boundary lines of , respectively; |
| 8 | destination point for to move; |
| 9 | If sees no robot outside then |
| 10 | execute the termination procedure; |
| 11 | If sees a robot in that is connected to other robot in North of (of ) |
| then | |
| 12 | does not move; ; |
| /* Conditions for horizontal hops */ | |
| 13 | Else if there is no robot on in the segment of ∧ no robot in is |
| connected to any other robot in West of except the robots in then | |
| 14 | set the destination point as a point at horizontal distance in East (where is |
| the horizontal distance from to the leftmost robot in ); | |
| /* Note:If be the leftmost robot in , then it moves | |
| distance 1 horizontally in East. And, if the conditions satisfy | |
| symmetrically, then sets as destination point to the position on | |
| in West. */ | |
| /* Conditions for diagonal hops */ | |
| 15 | Else if sees at least a robot on the diagonal point ∧ all the robots in are in |
| the diagonal line that passes through ∧ no robot in is connected to any | |
| other robot in the West of , except the robots in then | |
| 16 | set as the diagonal point at distance (where is the distance from to |
| , the topmost and leftmost robot in ); | |
| /*Note:Here, is the intersection point of and and | |
| is the unit square quadrant of in the South-West region. If | |
| be the topmost (leftmost) robot in , then it moves distance | |
| diagonally to . Moreover, if the above conditions satisfy | |
| symmetrically, then sets as destination point (the | |
| intersection point of and ). */ | |
| 17 | Else// Conditions for vertical hops |
| 18 | unit area in West of and South of ; |
| 19 | If sees a robot at the intersection point of lines and ∨ sees at least one robot |
| each in both sides (East and West) at horizontal distance ∨ ( sees a robot on of | |
| , no robot in is connected to other robot in North of and West of | |
| ) ∨ ( sees at least one robot in that is connected to other robot in South of | |
| in West of and no robot in is connected to other robot in North of | |
| and West of ) ∨ ( sees at least a robot in and at least a robot in | |
| is connected to a robot in North of and West of ) then | |
| 20 | set as the point vertically South at distance on of (where |
| is the vertical distance from to ); | |
| /* Note: If be the topmost robot in then it moves | |
| distance 1 vertically South. */ | |
| /* Move: */ | |
| 21 | moves to ; |
4.1.2. Detailed Description of the Patterns
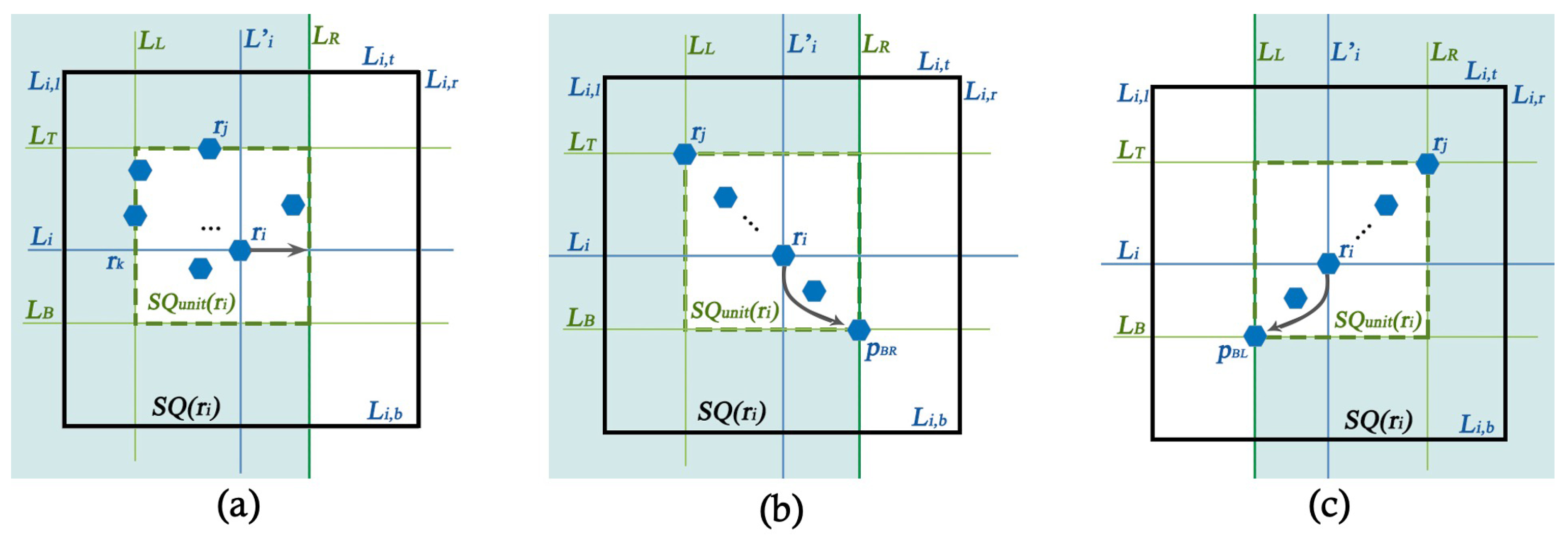
- This case is similar to the grid. If sees a robot at its east at distance one on line and there is no robot in , except the current position of and possibly on from up to , hops to the position of (distance 1).
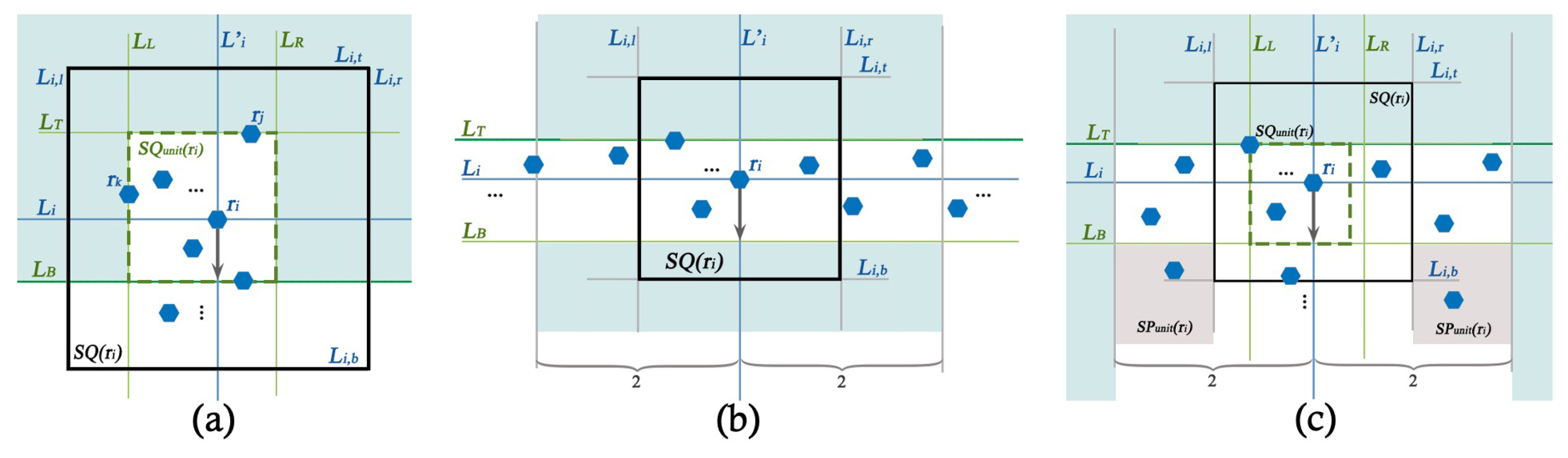
- Robot hops horizontally east on distance ( is the distance between and , the leftmost robot in ) if all the following conditions are satisfied (Figure 5a illustrates this case for a horizontal hop):
- -
- No robot in is connected to any other robot at the north of .
- -
- No robot in is connected to any other robot at the west of , except for the robots in .
- -
- There is no robot on of .
- This case is similar to grid. If sees no other robot in except at least one robot in on the diagonal corner point , hops to . Robot moves at a distance of exactly if it performs this hop.
- Robot hops diagonally at a distance of (where is the distance between and , the topmost which is also the leftmost robot of at point ) to a point in , if the following conditions are satisfied:
- -
- No robot in is connected to any other robot at the north of .
- -
- No robot in is connected to any other robot at the west of , except the robots in .
- -
- All robots in are in the diagonal line that passes through .
- -
- There is at least one robot on the diagonal point of .
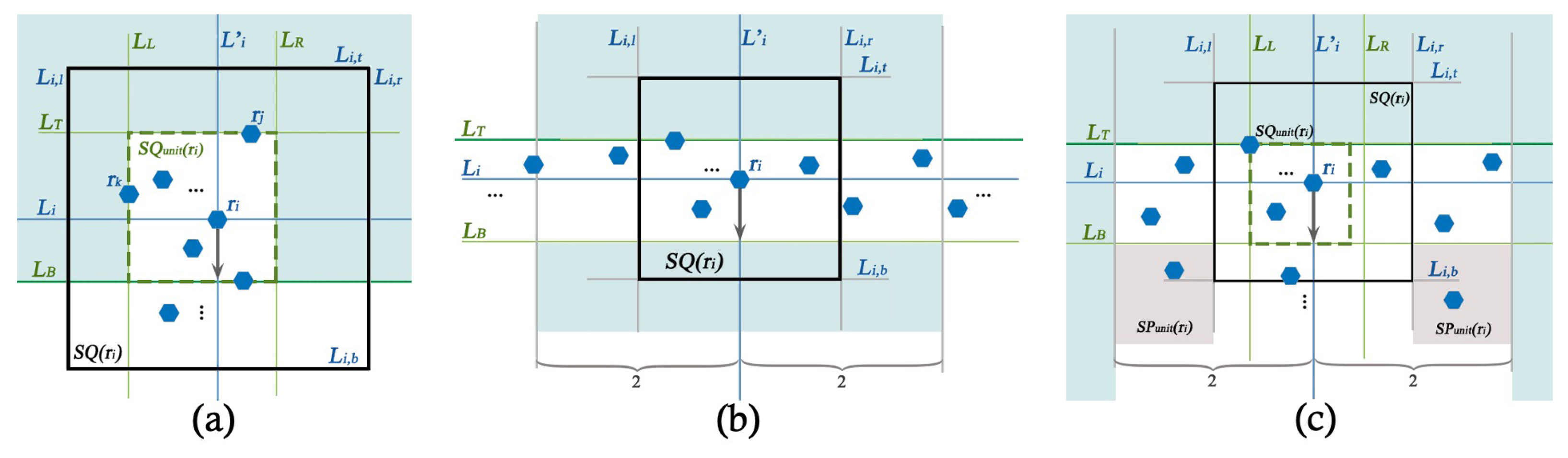
- Robot sees at least one robot at the intersection point of and .
- Robot sees at least one robot each at both the east and west at horizontal distance . Figure 6b illustrates this case.
- Robot sees at least one robot on of , no robot in is connected to any other robot at the north of and west of , and the conditions for a diagonal hop are not satisfied for . Figure 6a illustrates this case.
- Robot sees at least one robot in that is connected to a robot at the south of on or west of , and no robot in is connected to any other robot at the north of and west of . Figure 6a also illustrates this case.
- Let be a unit area at the west of and south of with being the topmost horizontal line of and being the rightmost vertical line of . Robot sees that at least one robot in is connected to a robot at the north of and west of , sees at least one robot in , and the conditions for a horizontal hop are not satisfied. Figure 6c illustrates this case.
4.1.3. The Termination Procedure
4.2. Analysis of the Algorithm
5. Gathering under One-Axis Agreement
5.1. Grid
5.2. Euclidean Plane
- –
- Robot sees at least one other robot each on both sides of on or south of , which is connected to at least one robot of .
- –
- Robot sees at least one other robot on or south of (which is connected ) at one side of (say east) and at least one other robot at horizontal distance ≥2 on the other side (west) (and vice-versa).
- –
- Robot sees other robot(s) on (or connected to other robot(s) at the south of ) only at one side of , say east, then finds the leftmost robot on of (or south of that is connected to ) and sees that no robot in is connected to another robot at its left (i.e., west) at a horizontal distance of ≥1 from (and vice-versa).
6. Concluding Remarks
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Suzuki, I.; Yamashita, M. Distributed Anonymous Mobile Robots: Formation of Geometric Patterns. SIAM J. Comput. 1999, 28, 1347–1363. [Google Scholar] [CrossRef] [Green Version]
- Flocchini, P.; Prencipe, G.; Santoro, N. Distributed Computing by Oblivious Mobile Robots. Synth. Lect. Distrib. Comput. Theory 2012, 3, 1–185. [Google Scholar] [CrossRef]
- Prencipe, G. Impossibility of Gathering by a Set of Autonomous Mobile Robots. Theor. Comput. Sci. 2007, 384, 222–231. [Google Scholar] [CrossRef] [Green Version]
- Izumi, T.; Kawabata, Y.; Kitamura, N. Toward Time-Optimal Gathering for Limited Visibility Model. 2015. Available online: https://sites.google.com/site/micromacfrance/abstract-tasuke (accessed on 18 October 2021).
- Cieliebak, M.; Flocchini, P.; Prencipe, G.; Santoro, N. Solving the Robots Gathering Problem. In Proceedings of the 30th International Colloquium on Automata, Languages, and Programming, Eindhoven, The Netherlands, 30 June–4 July 2003; pp. 1181–1196. [Google Scholar]
- Flocchini, P.; Prencipe, G.; Santoro, N.; Widmayer, P. Gathering of Asynchronous Robots with Limited Visibility. Theor. Comput. Sci. 2005, 337, 147–168. [Google Scholar] [CrossRef] [Green Version]
- Prencipe, G. Autonomous Mobile Robots: A Distributed Computing Perspective. In Proceedings of the 9th International Symposium on Algorithms and Experiments for Sensor Systems, Wireless Networks and Distributed Robotics, Sophia Antipolis, France, 5–6 September 2013; pp. 6–21. [Google Scholar]
- Souissi, S.; Défago, X.; Yamashita, M. Gathering Asynchronous Mobile Robots with Inaccurate Compasses. In Proceedings of the 10th on Principles of Distributed Systems, Bordeaux, France, 12–15 December 2006; pp. 333–349. [Google Scholar] [CrossRef]
- Cieliebak, M.; Flocchini, P.; Prencipe, G.; Santoro, N. Distributed Computing by Mobile Robots: Gathering. SIAM J. Comput. 2012, 41, 829–879. [Google Scholar] [CrossRef] [Green Version]
- Agathangelou, C.; Georgiou, C.; Mavronicolas, M. A Distributed Algorithm for Gathering Many Fat Mobile Robots in the Plane. In Proceedings of the 2013 ACM Symposium on Principles of Distributed Computing, Montréal, QC, Canada, 22–24 July 2013; pp. 250–259. [Google Scholar]
- Degener, B.; Kempkes, B.; Meyer auf der Heide, F. A Local O(n2) Gathering Algorithm. In Proceedings of the Twenty-Second Annual ACM Symposium on Parallelism in Algorithms and Architectures, Thira, Greece, 13–15 June 2010; pp. 217–223. [Google Scholar]
- Degener, B.; Kempkes, B.; Langner, T.; Meyer auf der Heide, F.; Pietrzyk, P.; Wattenhofer, R. A Tight Runtime Bound for Synchronous Gathering of Autonomous Robots with Limited Visibility. In Proceedings of the Twenty-Third Annual ACM Symposium on Parallelism in Algorithms and Architectures, San Jose, CA, USA, 4–6 June 2011; pp. 139–148. [Google Scholar]
- Kempkes, B.; Kling, P.; Meyer auf der Heide, F. Optimal and Competitive Runtime Bounds for Continuous, Local Gathering of Mobile Robots. In Proceedings of the Twenty-Fourth Annual ACM Symposium on Parallelism in Algorithms and Architectures, Pittsburgh, PA, USA, 25–27 June 2012; pp. 18–26. [Google Scholar]
- Cord-Landwehr, A.; Fischer, M.; Jung, D.; Meyer auf der Heide, F. Asymptotically Optimal Gathering on a Grid. In Proceedings of the 28th ACM Symposium on Parallelism in Algorithms and Architectures, Pacific Grove, CA, USA, 11–13 July 2016; pp. 301–312. [Google Scholar] [CrossRef] [Green Version]
- Castenow, J.; Fischer, M.; Harbig, J.; Jung, D.; Meyer auf der Heide, F. Gathering Anonymous, Oblivious Robots on a Grid. Theor. Comput. Sci. 2020, 815, 289–309. [Google Scholar] [CrossRef]
- Poudel, P.; Sharma, G. Universally Optimal Gathering Under Limited Visibility; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2017; Volume 10616, pp. 323–340. [Google Scholar] [CrossRef]
- Distributed Computing by Mobile Entities, Current Research in Moving and Computing; Lecture Notes in Computer Science; Flocchini, P.; Prencipe, G.; Santoro, N. (Eds.) Springer: Berlin/Heidelberg, Germany, 2019; Volume 11340. [Google Scholar] [CrossRef]
- Ando, H.; Suzuki, I.; Yamashita, M. Formation and Agreement Problems for Synchronous Mobile Robots with Limited Visibility. In Proceedings of the Tenth International Symposium on Intelligent Control, Monterey, CA, USA, 27–29 August 1995; pp. 453–460. [Google Scholar] [CrossRef]
- Kirkpatrick, D.; Kostitsyna, I.; Navarra, A.; Prencipe, G.; Santoro, N. Separating Bounded and Unbounded Asynchrony for Autonomous Robots: Point Convergence with Limited Visibility. In Proceedings of the 2021 ACM Symposium on Principles of Distributed Computing; ACM: New York, NY, USA, 2021; pp. 9–19. [Google Scholar] [CrossRef]
- Pagli, L.; Prencipe, G.; Viglietta, G. Getting Close Without Touching: Near-gathering for Autonomous Mobile Robots. Distrib. Comput. 2015, 28, 333–349. [Google Scholar] [CrossRef] [Green Version]
- Bhagat, S.; Mukhopadhyaya, K.; Mukhopadhyaya, S. Computation Under Restricted Visibility. In Distributed Computing by Mobile Entities: Current Research in Moving and Computing; Springer International Publishing: Cham, Switzerland, 2019; pp. 134–183. [Google Scholar] [CrossRef]
- Sharma, G.; Busch, C.; Mukhopadhyay, S.; Malveaux, C. Tight Analysis of a Collisionless Robot Gathering Algorithm. ACM Trans. Auton. Adapt. Syst. 2017, 12, 3:1–3:20. [Google Scholar] [CrossRef]
- Lukovszki, T.; auf der Heide, F.M. Fast Collisionless Pattern Formation by Anonymous, Position-Aware Robots. In Proceedings of the 18th Principles of Distributed Systems, Cortina d’Ampezzo, Italy, 16–19 December 2014; pp. 248–262. [Google Scholar]
- Cord-Landwehr, A.; Degener, B.; Fischer, M.; Hüllmann, M.; Kempkes, B.; Klaas, A.; Kling, P.; Kurras, S.; Märtens, M.; Meyer auf der Heide, F.; et al. Collisionless Gathering of Robots with an Extent. In Proceedings of the 37th Conference on Current Trends in Theory and Practice of Computer Science, Nový Smokovec, Slovakia, 22–28 January 2011; pp. 178–189. [Google Scholar]
- Braun, M.; Castenow, J.; auf der Heide, F.M. Local Gathering of Mobile Robots in Three Dimensions. In SIROCCO; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2020; Volume 12156, pp. 63–79. [Google Scholar] [CrossRef]
- Di Stefano, G.; Navarra, A. Optimal Gathering on Infinite Grids. In Proceedings of the 16th Symposium on Self-Stabilizing Systems, Paderborn, Germany, 28 September–1 October 2014; pp. 211–225. [Google Scholar]
- Di Stefano, G.; Navarra, A. Optimal gathering of oblivious robots in anonymous graphs and its application on trees and rings. Distrib. Comput. 2017, 30, 75–86. [Google Scholar] [CrossRef]
- D’Angelo, G.; Stefano, G.D.; Klasing, R.; Navarra, A. Gathering of Robots on Anonymous Grids without Multiplicity Detection. In Proceedings of the 19th International Colloquium on Structural Information and Communication Complexity, Reykjavik, Iceland, 30 June–2 July 2012; pp. 327–338. [Google Scholar] [CrossRef] [Green Version]
- Cord-Landwehr, A.; Degener, B.; Fischer, M.; Hüllmann, M.; Kempkes, B.; Klaas, A.; Kling, P.; Kurras, S.; Märtens, M.; Meyer auf der Heide, F.; et al. A New Approach for Analyzing Convergence Algorithms for Mobile Robots. In Proceedings of the 38th International Colloquium on Automata, Languages, and Programming, Zurich, Switzerland, 4–8 July 2011; pp. 650–661. [Google Scholar] [CrossRef]
- Cohen, R.; Peleg, D. Convergence Properties of the Gravitational Algorithm in Asynchronous Robot Systems. SIAM J. Comput. 2005, 34, 1516–1528. [Google Scholar] [CrossRef]
- Izumi, T.; Potop-Butucaru, M.G.; Tixeuil, S. Connectivity-preserving Scattering of Mobile Robots with Limited Visibility. In Proceedings of the 12th Symposium on Self-Stabilizing Systems, New York, NY, USA, 20–22 September 2010; pp. 319–331. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Poudel, P.; Sharma, G. Time-Optimal Gathering under Limited Visibility with One-Axis Agreement. Information 2021, 12, 448. https://doi.org/10.3390/info12110448
Poudel P, Sharma G. Time-Optimal Gathering under Limited Visibility with One-Axis Agreement. Information. 2021; 12(11):448. https://doi.org/10.3390/info12110448
Chicago/Turabian StylePoudel, Pavan, and Gokarna Sharma. 2021. "Time-Optimal Gathering under Limited Visibility with One-Axis Agreement" Information 12, no. 11: 448. https://doi.org/10.3390/info12110448
APA StylePoudel, P., & Sharma, G. (2021). Time-Optimal Gathering under Limited Visibility with One-Axis Agreement. Information, 12(11), 448. https://doi.org/10.3390/info12110448