Multi-Vehicle Simulation in Urban Automated Driving: Technical Implementation and Added Benefit


Abstract
1. Introduction
2. State of Research
2.1. Previous Studies on Multi-Agent Simulation
2.2. Implementation of Multi-Agent Simulation
3. Objectives
- RQ1: What methods should be used for multi-vehicle simulations with one automated vehicle to ensure synchronicity?
- RQ2: What is the added benefit of a multi-vehicle simulation with one automated vehicle compared to single-driver simulations?
4. Technical Implementation
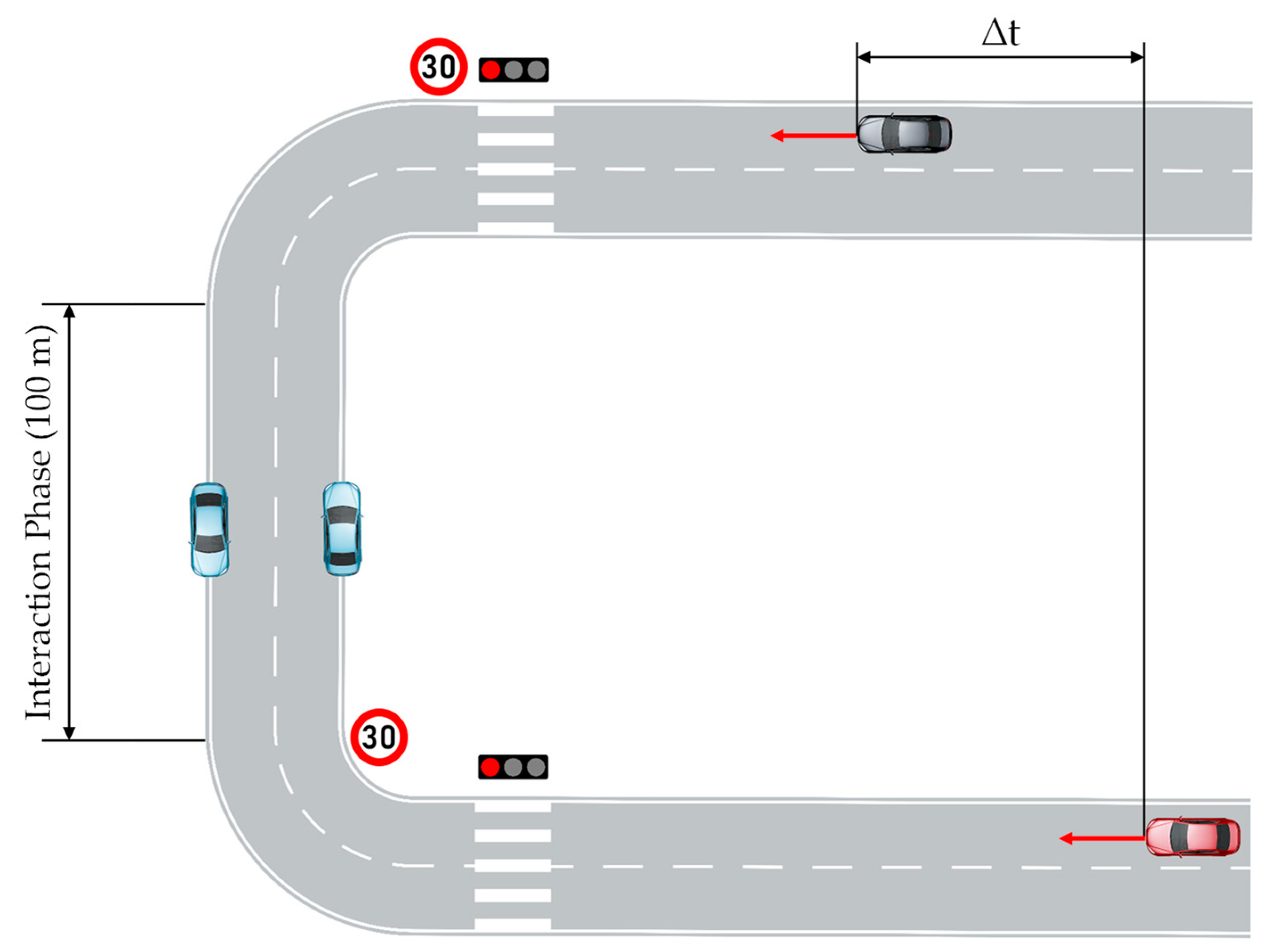
4.1. Basic Synchronization
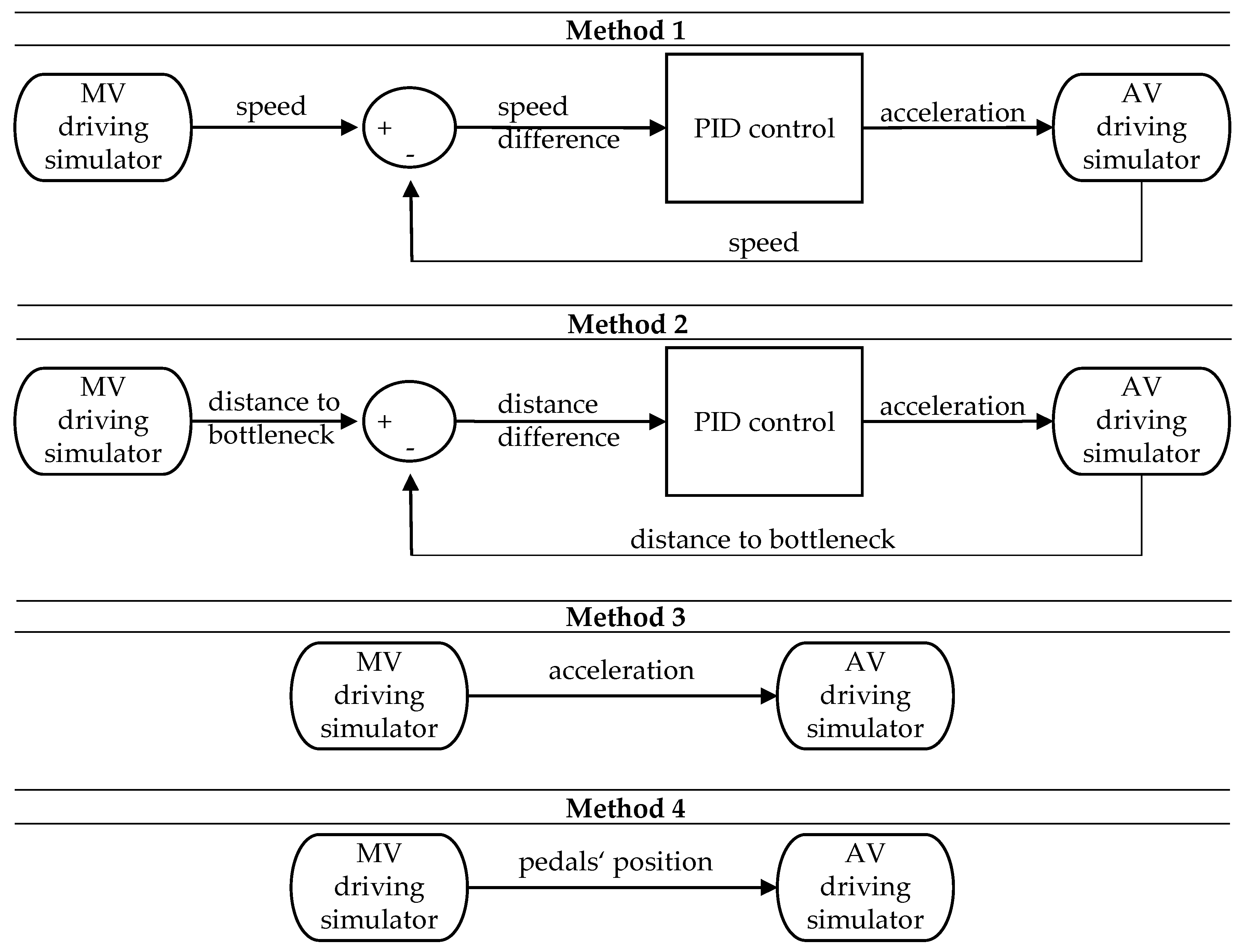
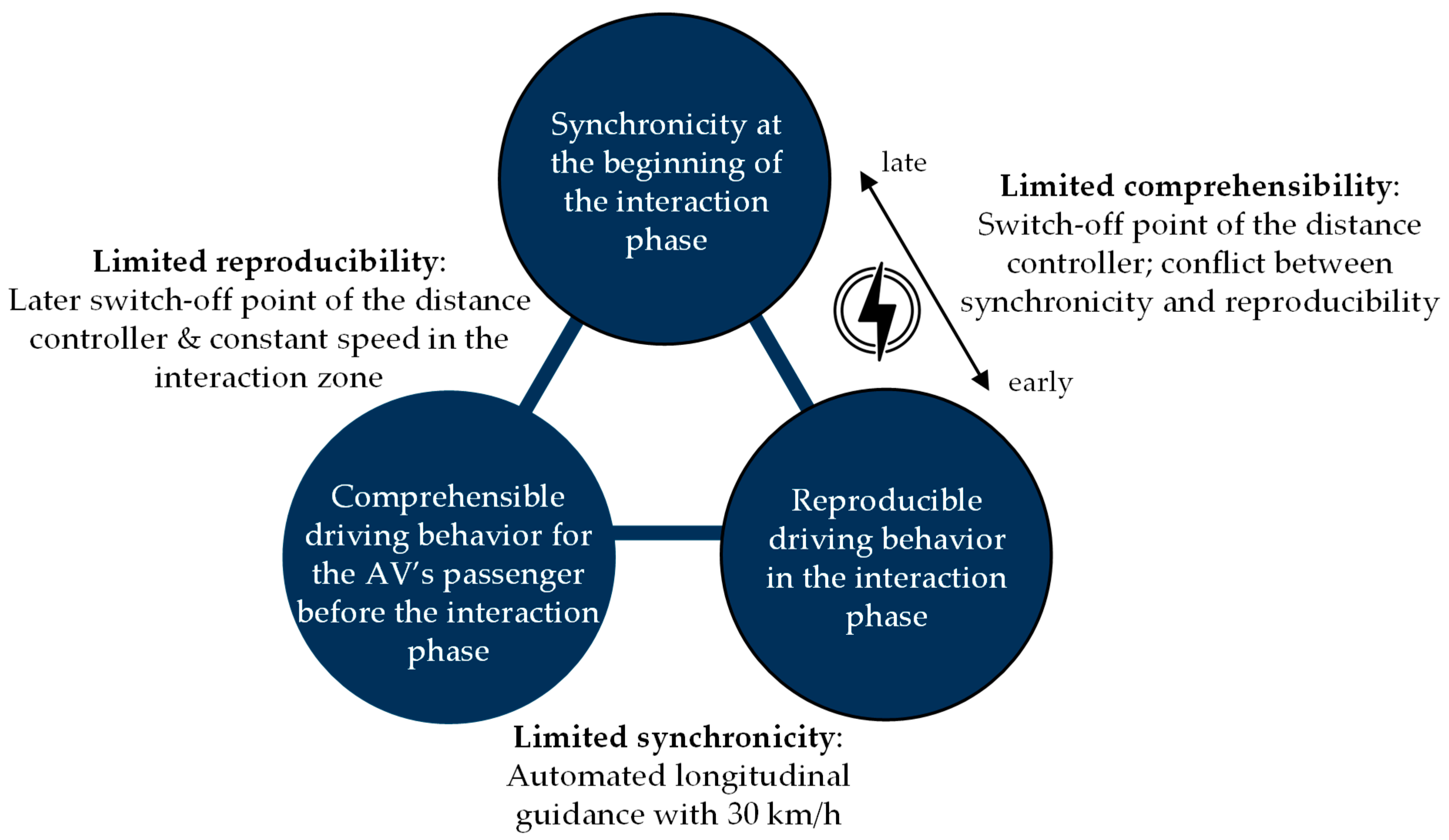
4.2. Detail Synchronization
- Implementation of a PID controller which controls the speed difference of both vehicles and has the acceleration as an output (Method 1)
- Implementation of a PID controller which controls the distance difference of both vehicles to the road bottleneck and has the acceleration as an output (Method 2)
- Transmitting the acceleration of the manual vehicle directly to the AV’s internal driving dynamics in SILAB (Method 3)
- Transmitting the pedals’ positions of the manual vehicle directly to the AV’s internal driving dynamics in SILAB (Method 4)
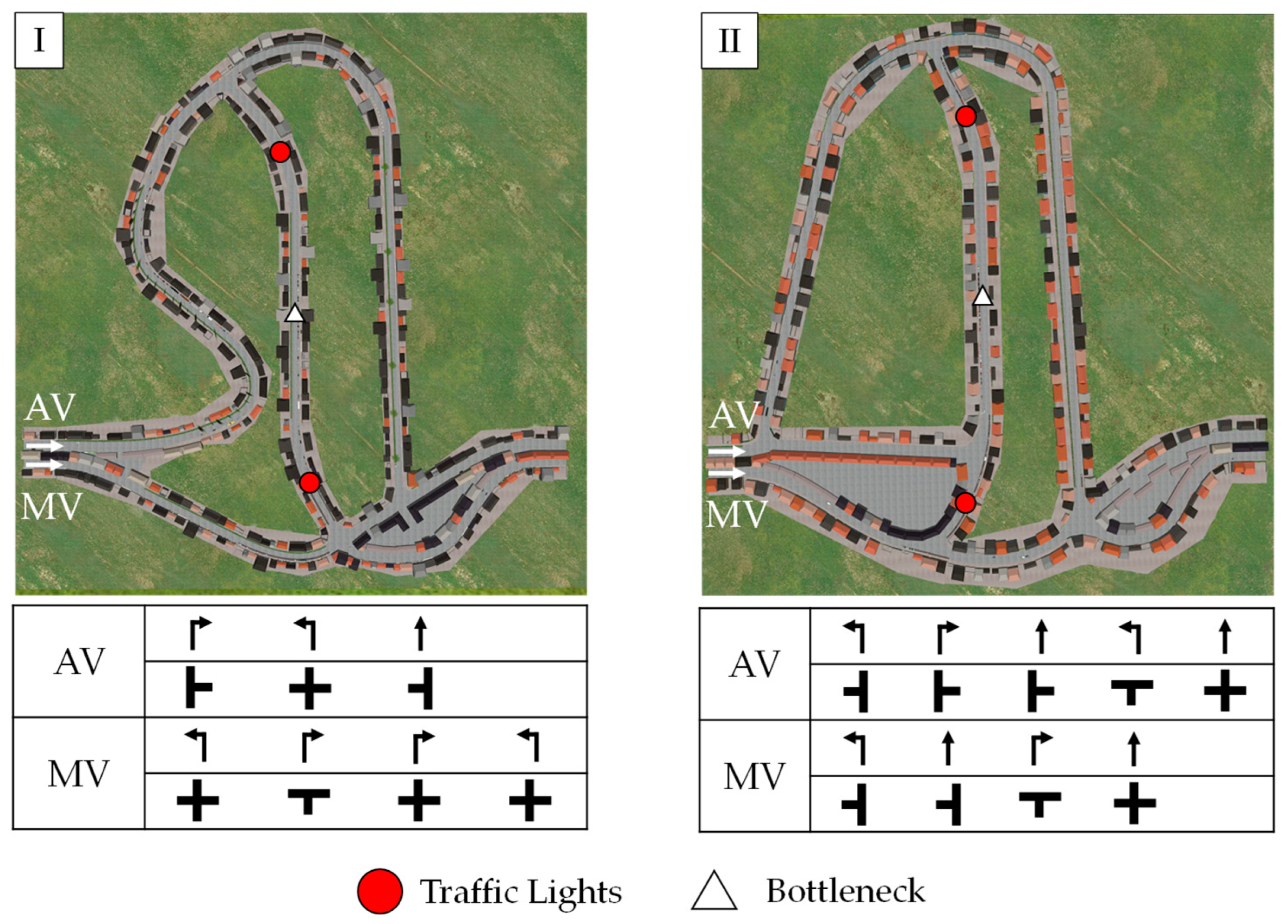
4.3. Course Design
5. Multi-Vehicle Study
5.1. Sample
5.2. Experimental Design
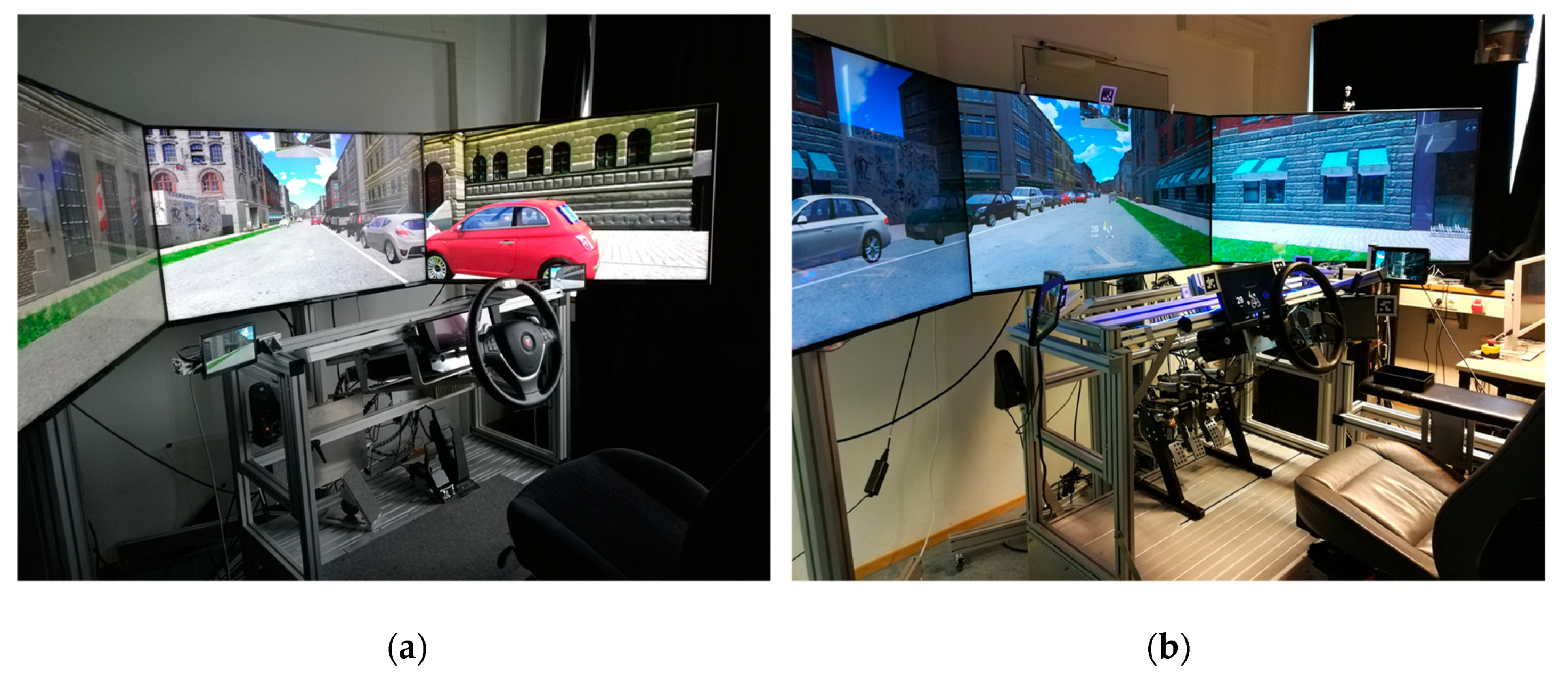
5.3. Driving Simulators
5.4. HMI Design
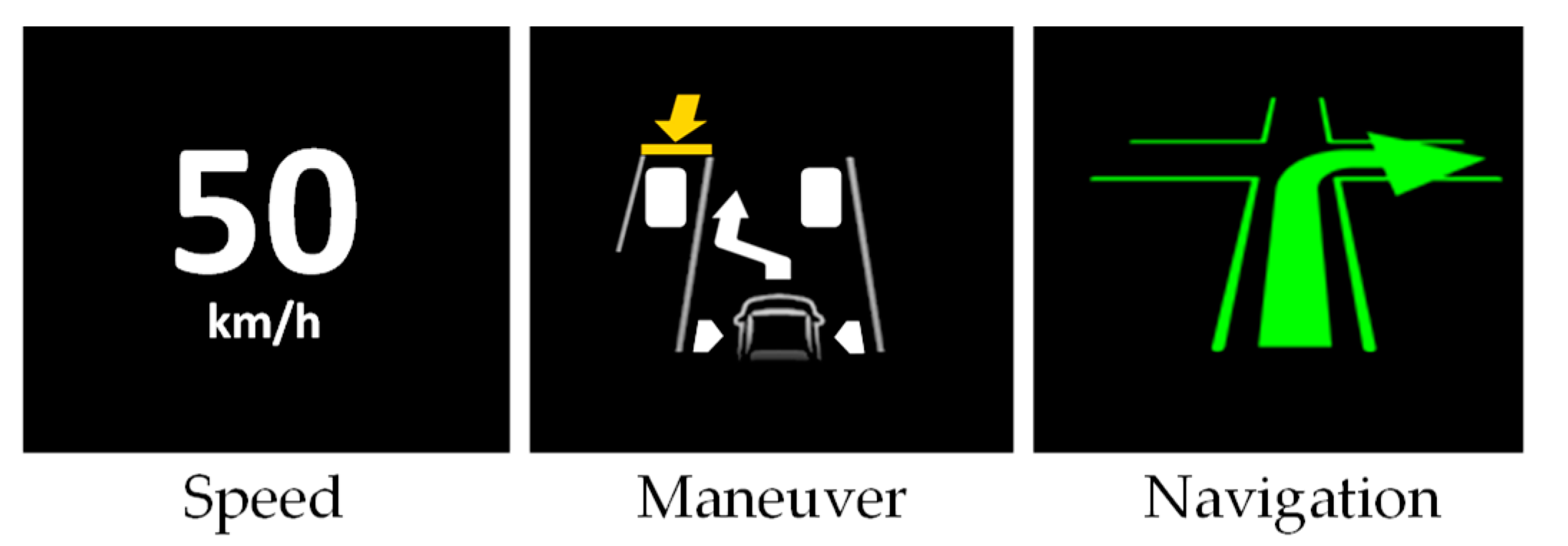
5.4.1. Human–Machine Interface of the Manual Vehicle
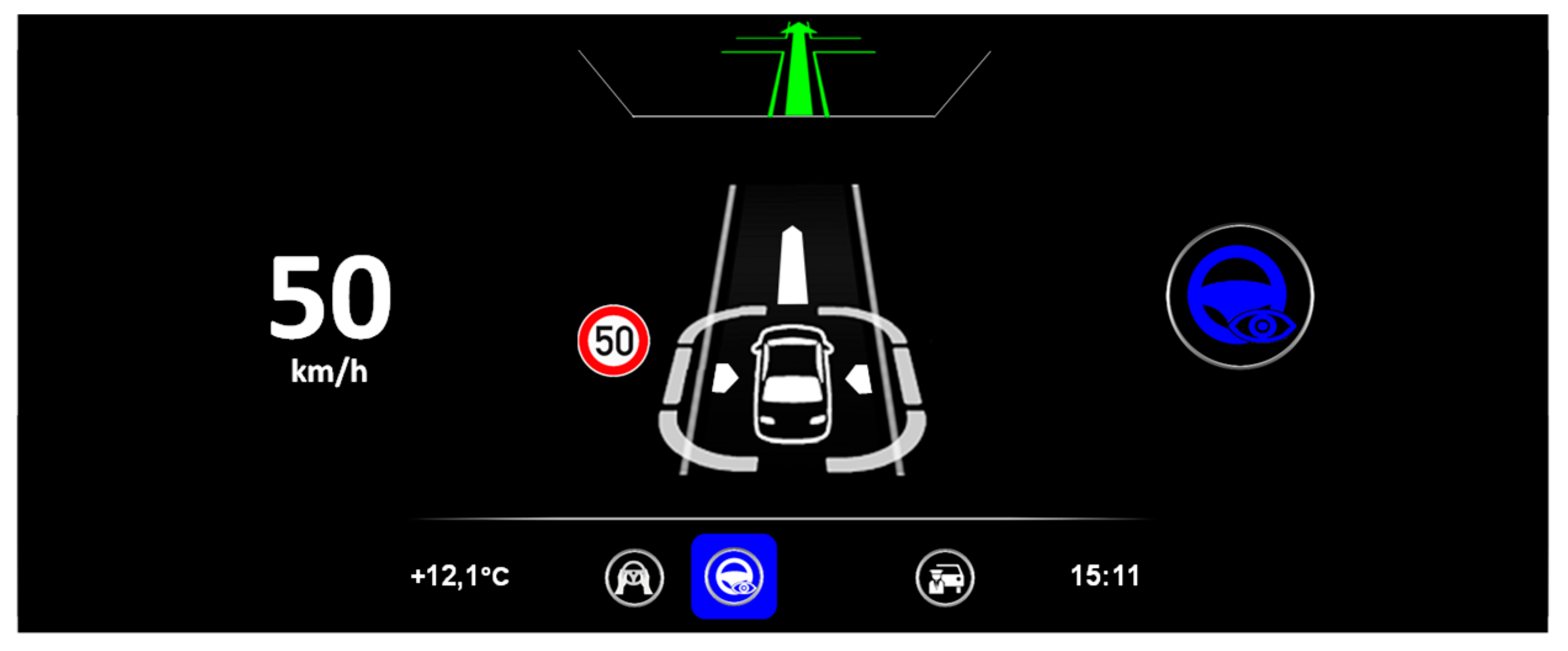
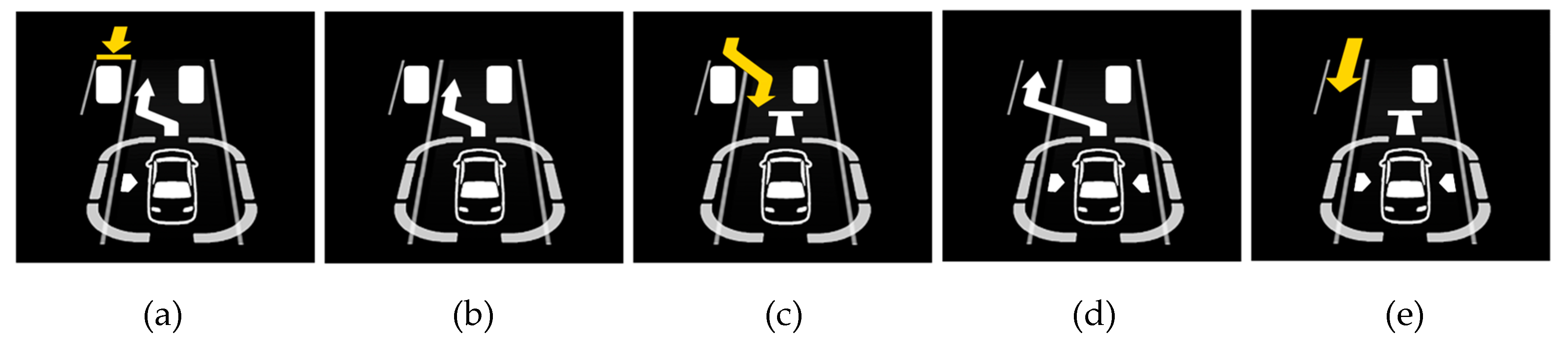
5.4.2. Automation Human–Machine Interface
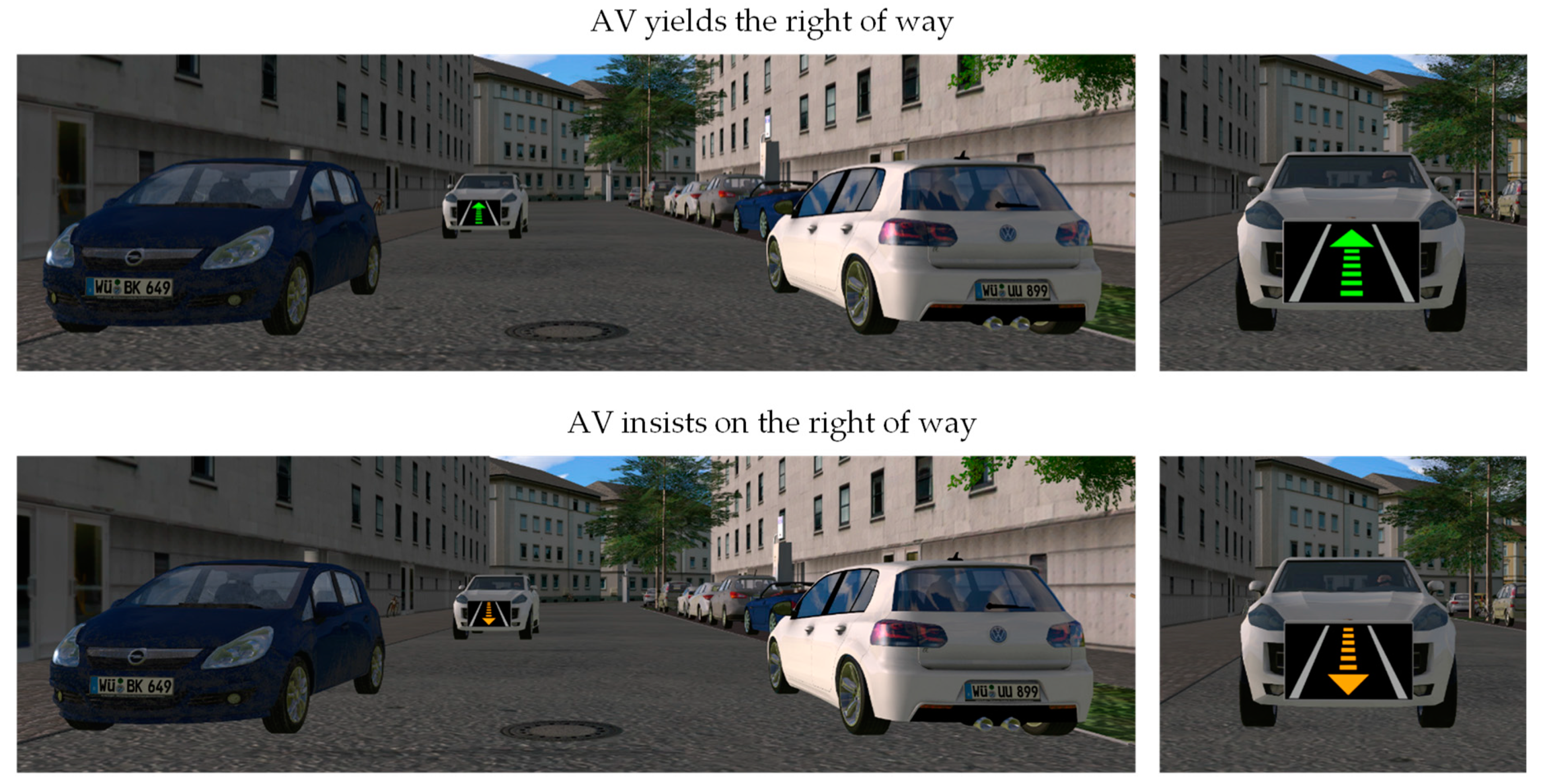
5.4.3. External Human–Machine Interface
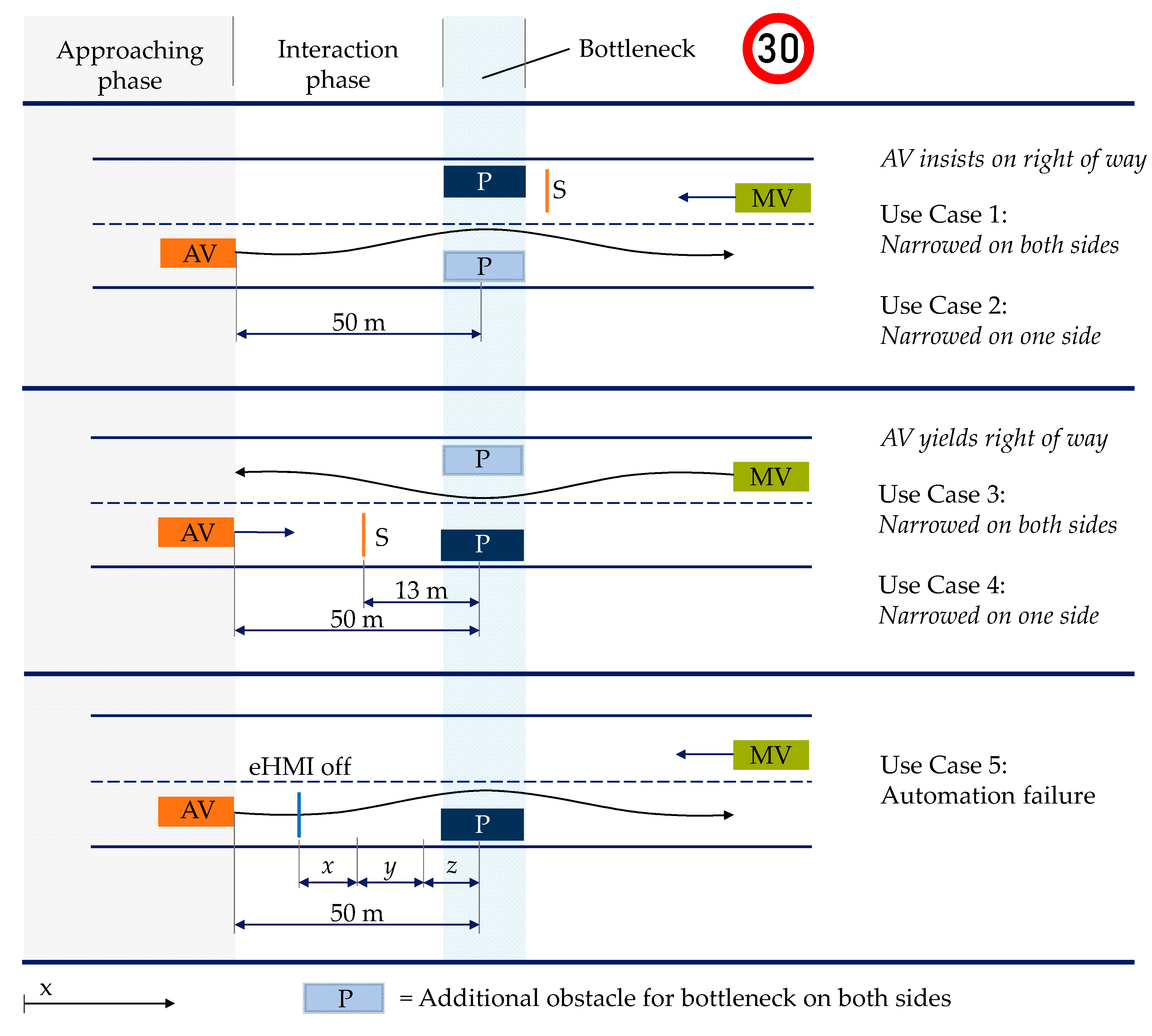
5.5. Experimental Track and Bottleneck Scenarios
5.6. Procedure
5.7. Measures and Analysis
6. Results
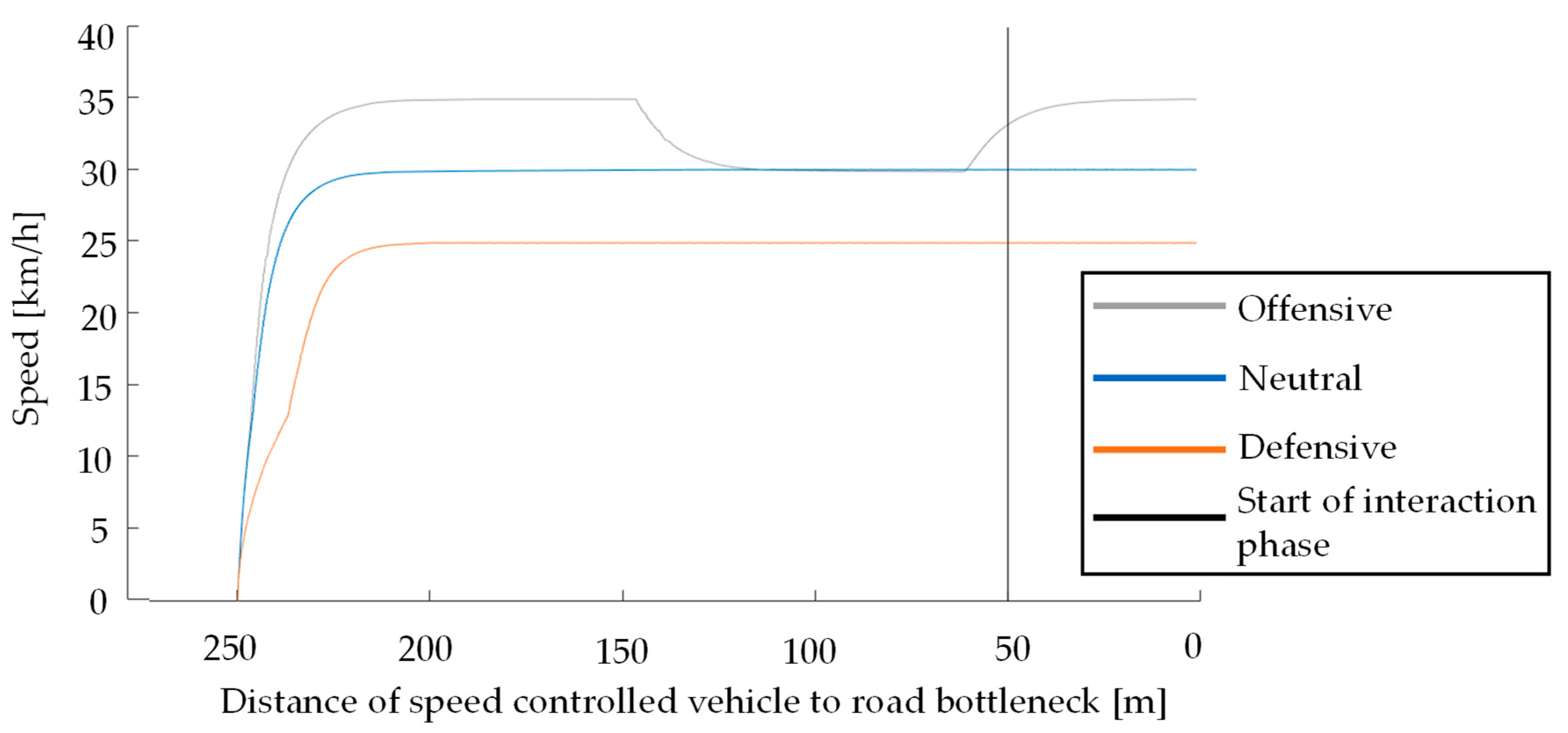
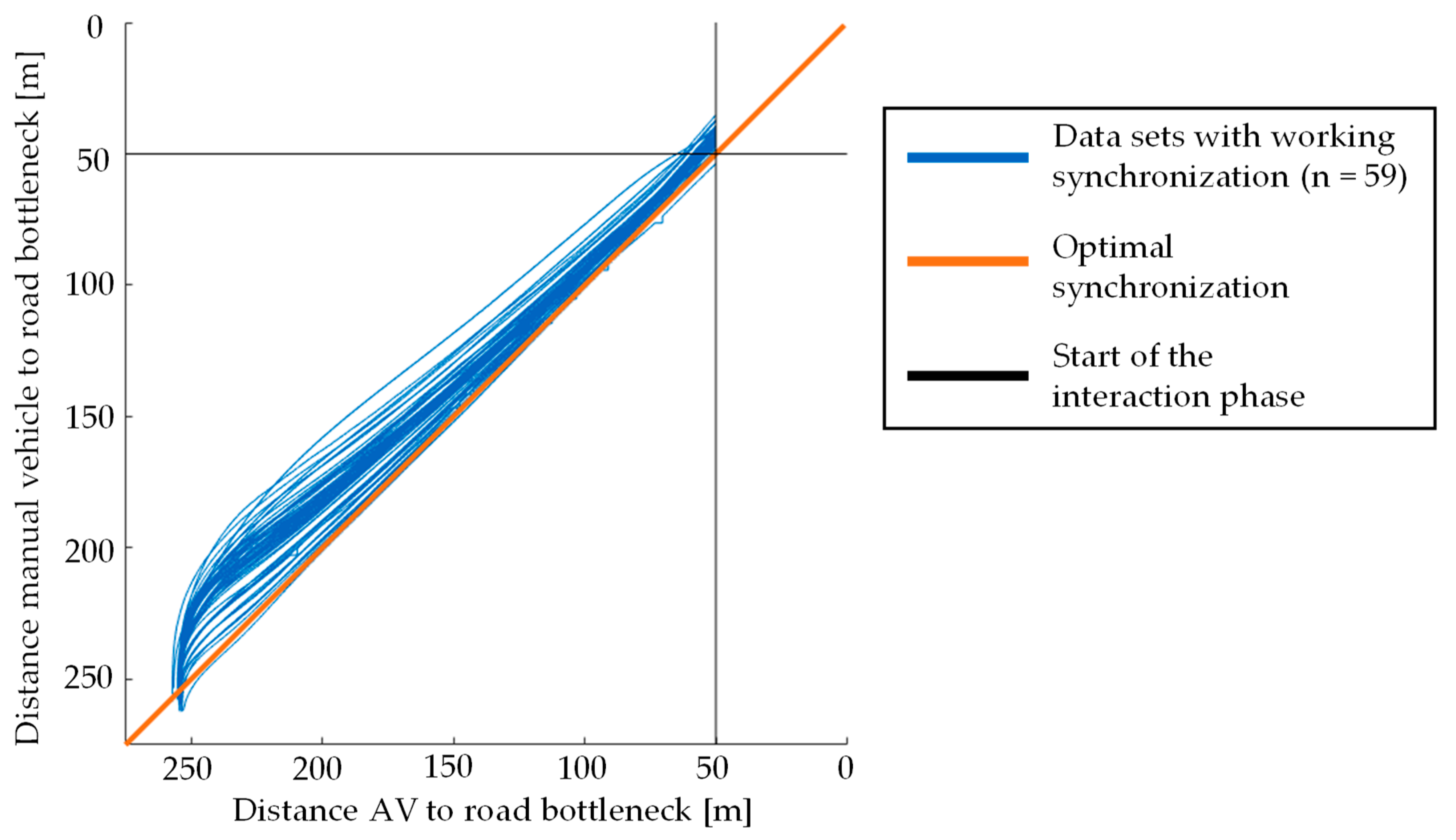
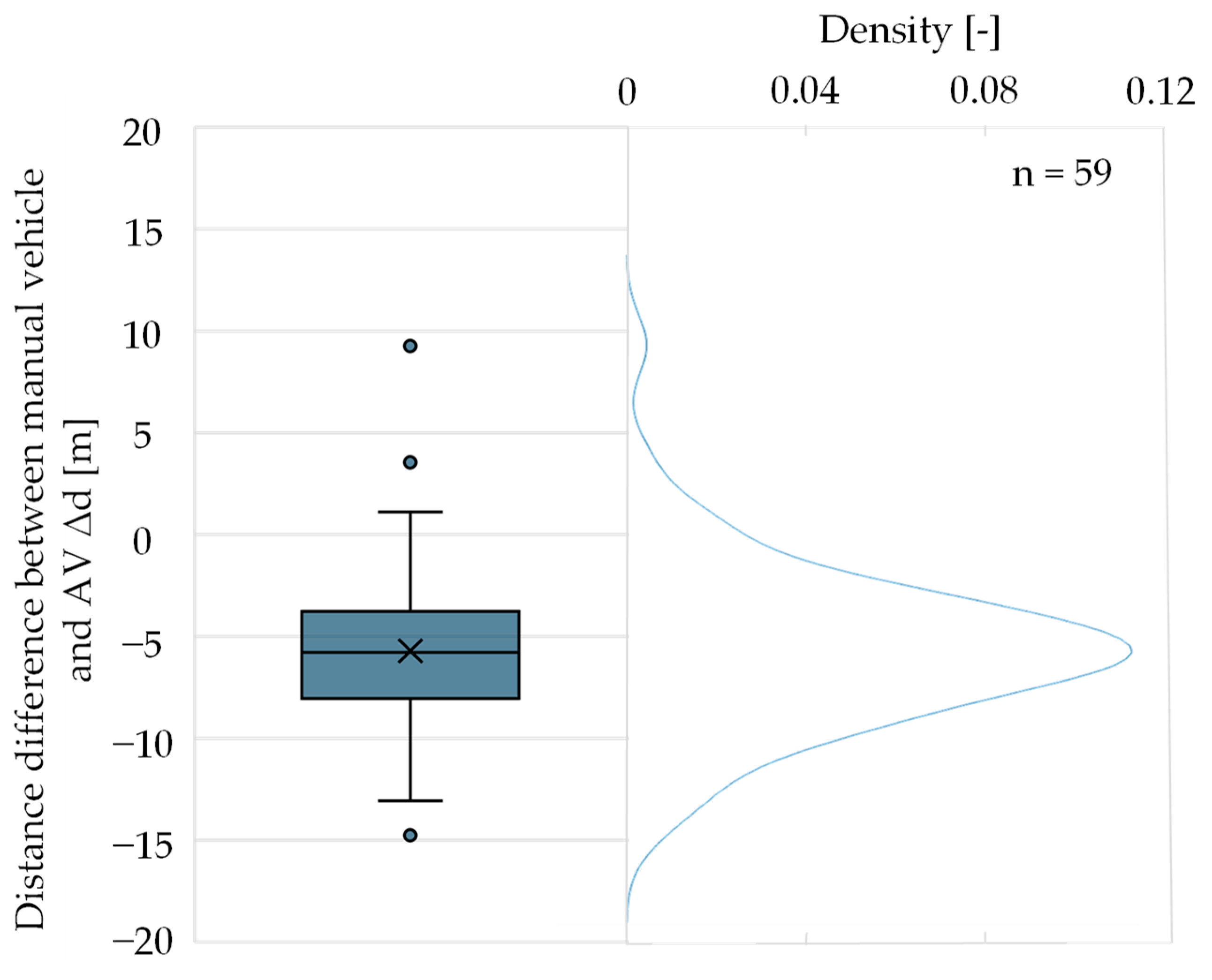
6.1. Technical Implementation
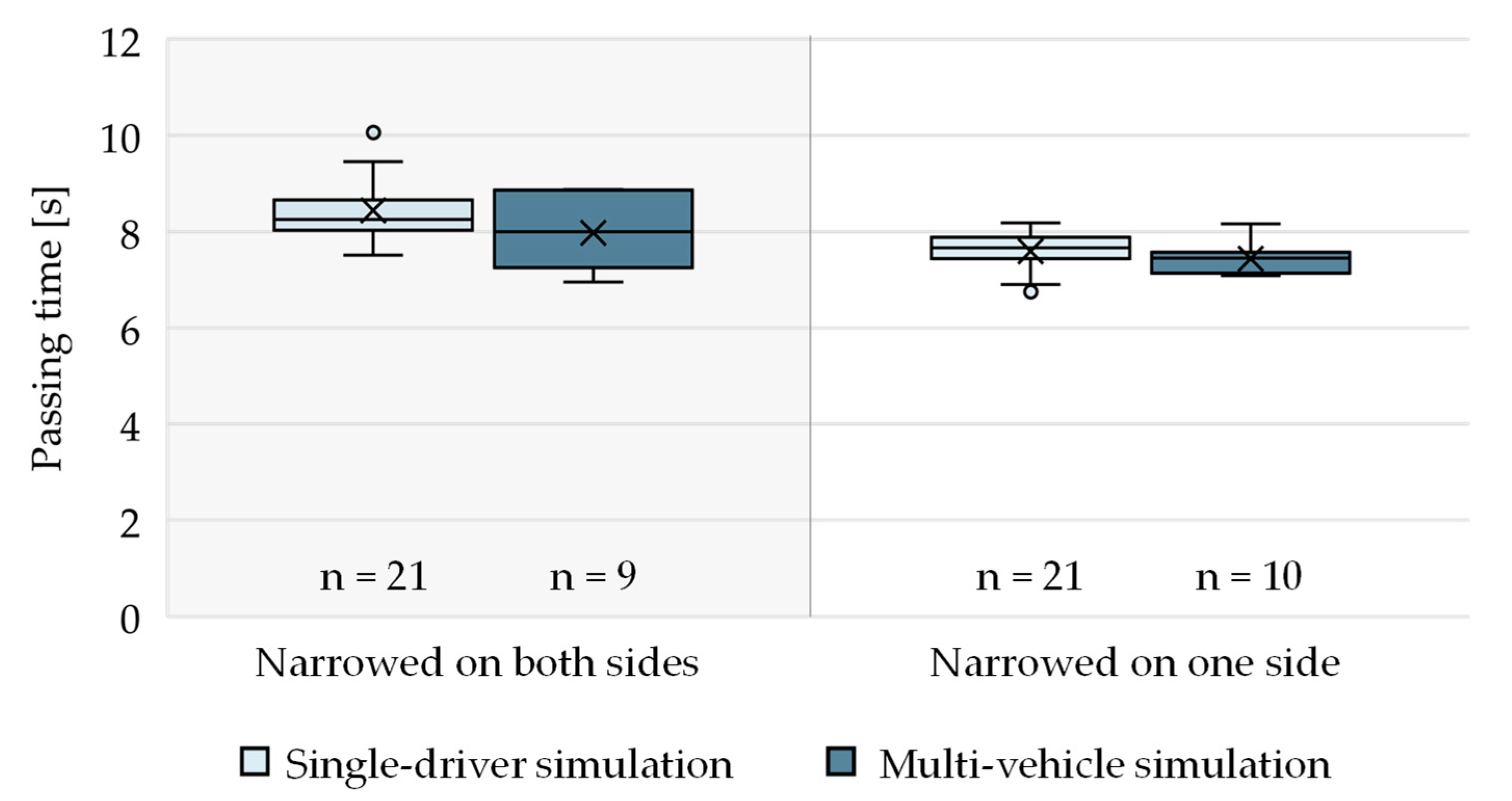
6.2. Multi-Vehicle Study
6.2.1. Human Driving Behavior
6.2.2. Effect of Automation Failure
7. Discussion
7.1. Technical Implementation
7.2. Multi-Vehicle Study
7.2.1. Human Driving Behavior
7.2.2. Effect of Automation Failure
7.2.3. Is Multi-Vehicle Simulation Beneficial?
7.3. Limitations
8. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Götze, M. Entwicklung und Evaluation eines integrativen MMI Gesamtkonzeptes zur Handlungsunterstützung für den urbanen Verkehr. Ph.D. Thesis, Technical University of Munich, Munich, Germany, 2018. [Google Scholar]
- Lüke, S.; Fochler, O.; Schaller, T.; Regensburger, U. Stauassistenz und-automation. In Handbuch Fahrerassistenzsysteme: Grundlagen, Komponenten und Systeme für aktive Sicherheit und Komfort; Winner, H., Hakuli, S., Lotz, F., Singer, C., Eds.; Springer Fachmedien Wiesbaden: Wiesbaden, Germany, 2015; pp. 995–1007. [Google Scholar] [CrossRef]
- Rittger, L.; Götze, M. HMI Strategy—Recommended Action. In UR:BAN Human Factors in Traffic; Bengler, K., Drüke, J., Hoffmann, S., Manstetten, D., Neukum, A., Eds.; Springer Fachmedien Wiesbaden: Wiesbaden, Germany, 2018; pp. 119–150. [Google Scholar] [CrossRef]
- Bengler, K.; Rettenmaier, M.; Fritz, N.; Feierle, A. From HMI to HMIs: Towards an HMI Framework for Automated Driving. Information 2020, 11, 61. [Google Scholar] [CrossRef]
- Habibovic, A.; Andersson, J.; Malmsten Lundgren, V.; Klingegård, M.; Englund, C.; Larsson, S. External Vehicle Interfaces for Communication with Other Road Users. In Road Vehicle Automation; Springer: Cham, Germany, 2018; pp. 91–102. [Google Scholar] [CrossRef]
- Rettenmaier, M.; Pietsch, M.; Schmidtler, J.; Bengler, K. Passing through the Bottleneck—The Potential of External Human-Machine Interfaces. In Proceedings of the IEEE Intelligent Vehicles Symposium (IV), Paris, France, 9–12 June 2019; pp. 1687–1692. [Google Scholar] [CrossRef]
- SAE International. Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles; SAE International: Warrendale, PA, USA, 2018; p. 3016. [Google Scholar]
- Mühlbacher, D.; Preuk, K.; Lehsing, C.; Will, S.; Dotzauer, M. Multi-Road User Simulation: Methodological Considerations from Study Planning to Data Analysis. In UR:BAN Human Factors in Traffic: Approaches for Safe, Efficient and Stress-Free Urban Traffic; Bengler, K., Drüke, J., Hoffmann, S., Manstetten, D., Neukum, A., Eds.; Springer Fachmedien Wiesbaden: Wiesbaden, Germany, 2018; pp. 403–418. ISBN 978-3-658-15418-9. [Google Scholar]
- Oeltze, K.; Dotzauer, M. Towards A Best Practice for Multi-Driver Simulator Studies. In Proceedings of the Workshop on Practical Experiences in Measuring and Modeling Drivers and Driver-Vehicle Interactions at AutomotiveUI’15, Nottingham, UK, 1–3 September 2015. [Google Scholar]
- Oeltze, K.; Schießl, C. Benefits and challenges of multi-driver simulator studies. IET Intell. Transp. Syst. 2015, 9, 618–625. [Google Scholar] [CrossRef]
- Sun, J.; Ma, Z.; Li, T.; Niu, D. Development and application of an integrated traffic simulation and multi-driving simulators. Simul. Model. Pract. Theory 2015, 59, 1–17. [Google Scholar] [CrossRef]
- Mühlbacher, D.; Rittger, L.; Maag, C. Real vs. Simulated Surrounding Traffic—Does It Matter. In Proceedings of the Driving Simulation Conference 2014, Paris, France, 4–5 September 2014. [Google Scholar]
- Mühlbacher, D. The Multi-Driver Simulation: A Tool to Investigate Social Interactions Between Several Drivers. In UR:BAN Human Factors in Traffic: Approaches for Safe, Efficient and Stress-free Urban Traffic; Bengler, K., Drüke, J., Hoffmann, S., Manstetten, D., Neukum, A., Eds.; Springer Fachmedien Wiesbaden: Wiesbaden, Germany, 2018; pp. 379–391. ISBN 978-3-658-15418-9. [Google Scholar]
- Maag, C. Emerging Phenomena During Driving Interactions. In Co-Evolution of Intelligent Socio-Technical Systems; Mitleton-Kelly, E., Ed.; Springer: Berlin/Heidelberg, Germany, 2013; pp. 185–218. [Google Scholar] [CrossRef]
- Lehsing, C.; Benz, T.; Bengler, K. Insights into Interaction—Effects of Human-Human Interaction in Pedestrian Crossing Situations using a linked Simulator Environment. IFAC-PapersOnLine 2016, 49, 138–143. [Google Scholar] [CrossRef]
- Hancock, P.A.; de Ridder, S.N. Behavioural accident avoidance science: Understanding response in collision incipient conditions. Ergonomics 2003, 46, 1111–1135. [Google Scholar] [CrossRef] [PubMed]
- Yasar, A.-U.-H.; Berbers, Y.; Preuveneers, D. Computational Analysis of Driving Variations on Distributed Multiuser Driving Simulators. In Proceedings of the Second IASTED Africa Conference on Modelling and Simulation, Gaborone, Botswana, 8–10 September 2008; Science and technology innovation for sustainable development. Ogwu, F.J., Ed.; International Association of Science and Technology for Development: Calgary, AB, Canada, 2008. ISBN 9780889867642. [Google Scholar]
- Will, S. A New Approach to Investigate Powered Two Wheelers’ Interactions with Passenger Car Drivers: The Motorcycle—Car Multi-Driver Simulation. In UR:BAN Human Factors in Traffic: Approaches for Safe, Efficient and Stress-free Urban Traffic; Bengler, K., Drüke, J., Hoffmann, S., Manstetten, D., Neukum, A., Eds.; Springer Fachmedien Wiesbaden: Wiesbaden, Germany, 2018; pp. 393–402. ISBN 978-3-658-15418-9. [Google Scholar]
- Mühlbacher, D.; Zimmer, J.; Fischer, F.; Krüger, H.-P. The multi-driver simulator—A new concept of driving simulation for the analysis of interactions between several drivers. In Human Centred Automation; de Waard, D., Gérard, L., Onnasch, L., Wiczorek, R., Manzey, D., Eds.; Shaker Publishing: Maastricht, The Netherlands, 2011; pp. 147–158. [Google Scholar]
- Mühlbacher, D.; Krüger, H.-P. The effect of car-following on lateral guidance during cognitive load—A study conducted in the multi-driver simulation. In Proceedings of the 2nd International Conference on Driver Distraction and Inattention 2011, Gothenburg, Sweden, 5–7 September 2011. [Google Scholar]
- Heesen, M.; Baumann, M.; Kelsch, J.; Nause, D.; Friedrich, M. Investigation of Cooperative Driving Behaviour during Lane Change in a Multi-Driver Simulation Environment. In Proceedings of the HFES Europe Chapter Conference Toulouse, Toulouse, France, 10–12 October 2012. [Google Scholar]
- Niu, D.; Sun, J. Eco-driving Versus Green Wave Speed Guidance for Signalized Highway Traffic: A Multi-vehicle Driving Simulator Study. Procedia-Soc. Behav. Sci. 2013, 96, 1079–1090. [Google Scholar] [CrossRef]
- Gajananan, K.; Nantes, A.; Miska, M.; Nakasone, A.; Prendinger, H. An Experimental Space for Conducting Controlled Driving Behavior Studies based on a Multiuser Networked 3D Virtual Environment and the Scenario Markup Language. IEEE Trans. Hum. -Mach. Syst. 2013, 43, 345–358. [Google Scholar] [CrossRef]
- Rittger, L.; Mühlbacher, D.; Maag, C.; Kiesel, A. Anger and bother experience when driving with a traffic light assistant: A multi-driver simulator study. In Proceedings of the Human Factors and Ergonomics Society Europe Chapter 2014 Annual Conference, Lisbon, Portugal, 8–10 October 2014. [Google Scholar]
- Friedrich, M.; Nause, D.; Heesen, M.; Keich, A.; Kelsch, J.; Baumann, M.; Vollrath, M. Validation of the MoSAIC-Driving Simulator—Investigating the impact of a human driver on cooperative driving behavior in an experimental simulation setup. Proc. Hum. Factors Ergon. Soc. Annu. Meet. 2013, 57, 2052–2056. [Google Scholar] [CrossRef]
- Bazilinskyy, P.; Kooijman, L.; Dodou, D.; de Winter, J.C.F. Coupled Simulator for Research on the Interaction between Pedestrians and (Automated) Vehicles. 2019. Available online: https://www.researchgate.net/publication/338118077_Coupled_simulator_for_research_on_the_interaction_between_pedestrians_and_automated_vehicles (accessed on 19 May 2020).
- Schindler, J.; Köster, F. A Dynamic and Model-Based Approach for Performing Successful Multi-Driver Studies. Proceedings of DSC Europe, Paris, France, 7–9 September 2016. [Google Scholar]
- Mühlbacher, D. Die Pulksimulation als Methode zur Untersuchung verkehrspsychologischer Fragestellungen. Ph.D. Thesis, University of Würzburg, Würzburg, Germany, 2013. [Google Scholar]
- Will, S. Die—vernetzte—Fahrsimulation zur Untersuchung des Fahr-und Interaktionsverhaltens von Motorradfahrern. 2016. Available online: https://docplayer.org/22386886-Sim-die-vernetzte-fahrsimulation-zur-untersuchung-des-fahr-und-interaktionsverhaltens-von-motorradfahrern.html (accessed on 19 May 2020).
- Rettenmaier, M.; Albers, D.; Bengler, K. After you?!—Use of external human-machine interfaces in road bottleneck scenarios. Transp. Res. Part F Traffic Psychol. Behav. 2020, 70, 175–190. [Google Scholar] [CrossRef]
- Rettenmaier, M.; Requena Witzig, C.; Bengler, K. Interaction at the Bottleneck—A Traffic Observation. In Human Systems Engineering and Design II; Ahram, T., Karwowski, W., Pickl, S., Taiar, R., Eds.; Springer International Publishing: Cham, Germany, 2020; pp. 243–249. [Google Scholar] [CrossRef]
- Würzburg Institute for Traffic Sciences GmbH. Driving Simulation and SILAB. Available online: https://wivw.de/en/silab (accessed on 14 December 2019).
- Drüke, J.; Semmler, C.; Bendewald, L. The “HMI tool kit” as a Strategy for the Systematic Derivation of User-Oriented HMI Concepts of Driver Assistance Systems in Urban Areas. In UR:BAN Human Factors in Traffic; Bengler, K., Drüke, J., Hoffmann, S., Manstetten, D., Neukum, A., Eds.; Springer Fachmedien Wiesbaden: Wiesbaden, Germany, 2018; pp. 53–74. [Google Scholar] [CrossRef]
- van den Beukel, A.P.; van der Voort, M.C. Design Considerations on User-Interaction for Semi-Automated Driving. In Proceedings of the FISITA 2014 World Automotive Congress, Maastricht, The Netherlands, 2–6 June 2014. [Google Scholar]
- Othersen, I. Vom Fahrer zum Denker und Teilzeitlenker: Einflussfaktoren und Gestaltungsmerkmale nutzerorientierter Interaktionskonzepte für die Überwachungsaufgabe des Fahrers im teilautomatisierten Modus. AutoUni-Schr. 2016. [Google Scholar] [CrossRef]
- Yang, Y.; Götze, M.; Laqua, A.; Dominioni, G.C.; Kawabe, K.; Bengler, K. A method to improve driver’s situation awareness in automated driving. In Proceedings of the Human Factors and Ergonomics Society Europe Chapter 2017 Annual Conference, Rome, Italy, 28–30 September 2017. [Google Scholar]
- Yang, Y.; Karakaya, B.; Dominioni, G.C.; Kawabe, K.; Bengler, K. An HMI Concept to Improve Driver’s Visual Behavior and Situation Awareness in Automated Vehicle. In Proceedings of the 2018 IEEE Intelligent Transportation Systems Conference (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 650–655. [Google Scholar] [CrossRef]
- Feldhütter, A.; Härtwig, N.; Kurpiers, C.; Hernandez, J.M.; Bengler, K. Effect on Mode Awareness When Changing from Conditionally to Partially Automated Driving. In Proceedings of the 20th Congress of the International Ergonomics Association (IEA 2018), Florence, Italy, 26–30 August 2018; Volume VI: Transport Ergonomics and Human Factors (TEHF), Aerospace Human Factors and Ergonomics. Bagnara, S., Tartaglia, R., Albolino, S., Alexander, T., Fujita, Y., Eds.; Springer International Publishing: Cham, Germany, 2019; pp. 314–324. [Google Scholar] [CrossRef]
- Feierle, A.; Danner, S.; Steininger, S.; Bengler, K. Information Needs and Visual Attention during Urban, Highly Automated Driving—An Investigation of Potential Influencing Factors. Information 2020, 11, 62. [Google Scholar] [CrossRef]
- Feierle, A.; Holderied, M.; Bengler, K. Evaluation of Ambient Light Displays for Requests to Intervene and Minimal Risk Maneuvers in Highly Automated Urban Driving. In Proceedings of the 2020 IEEE Intelligent Transportation Systems Conference (ITSC), Rhodes, Greece, 20–23 September 2020. [Google Scholar]
- Feierle, A.; Bücherl, F.; Hecht, T.; Bengler, K. Evaluation of Display Concepts for the Instrument Cluster in Urban Automated Driving. In Human Systems Engineering and Design II; Ahram, T., Karwowski, W., Pickl, S., Taiar, R., Eds.; Springer International Publishing: Cham, Germary, 2020; pp. 209–215. [Google Scholar] [CrossRef]
- Feierle, A.; Beller, D.; Bengler, K. Head-Up Displays in Urban Partially Automated Driving: Effects of Using Augmented Reality. In Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference (ITSC) 2019, Auckland, New Zealand, 27–30 October 2019; pp. 1877–1882. [Google Scholar] [CrossRef]
- Werneke, J.; Vollrath, M. Signal evaluation environment: A new method for the design of peripheral in-vehicle warning signals. Behav. Res. Methods 2011, 43, 537–547. [Google Scholar] [CrossRef] [PubMed][Green Version]
- Bainbridge, L. Ironies of automation. Automatica 1983, 19, 775–779. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Switch-Off Distance [m] | M [m] | SD [m] |
|---|---|---|
| 50 | −0.79 | 1.11 |
| 80 | 0.21 | 4.49 |
| 90 | 0.76 | 5.31 |
| 100 | 1.57 | 6.11 |
| 110 | 2.19 | 7.14 |
| 120 | 2.65 | 8.19 |
| AV Insists on Right of Way | AV Yields Right of Way | Automation Failure | |
|---|---|---|---|
| Bottleneck narrowed on both sides | Use Case 1 (Module I) | Use Case 3 (Module I) | - |
| Bottleneck narrowed on one side | Use Case 2 (Module II) | Use Case 4 (Module II) | Use Case 5 (Module II) |
| Bottleneck Narrowed on Both Sides | Bottleneck Narrowed on One Side | |
|---|---|---|
| Single-driver simulation M (SD) [ms] | 8445 (1405) (n = 21) | 7598 (495) (n = 21) |
| Multi-vehicle simulation M (SD) [ms] | 7980 (740) (n = 9) | 7440 (310) (n = 10) |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feierle, A.; Rettenmaier, M.; Zeitlmeir, F.; Bengler, K. Multi-Vehicle Simulation in Urban Automated Driving: Technical Implementation and Added Benefit. Information 2020, 11, 272. https://doi.org/10.3390/info11050272
Feierle A, Rettenmaier M, Zeitlmeir F, Bengler K. Multi-Vehicle Simulation in Urban Automated Driving: Technical Implementation and Added Benefit. Information. 2020; 11(5):272. https://doi.org/10.3390/info11050272
Chicago/Turabian StyleFeierle, Alexander, Michael Rettenmaier, Florian Zeitlmeir, and Klaus Bengler. 2020. "Multi-Vehicle Simulation in Urban Automated Driving: Technical Implementation and Added Benefit" Information 11, no. 5: 272. https://doi.org/10.3390/info11050272
APA StyleFeierle, A., Rettenmaier, M., Zeitlmeir, F., & Bengler, K. (2020). Multi-Vehicle Simulation in Urban Automated Driving: Technical Implementation and Added Benefit. Information, 11(5), 272. https://doi.org/10.3390/info11050272