Development of Control Experiments for an Online Laboratory System


Abstract
1. Introduction
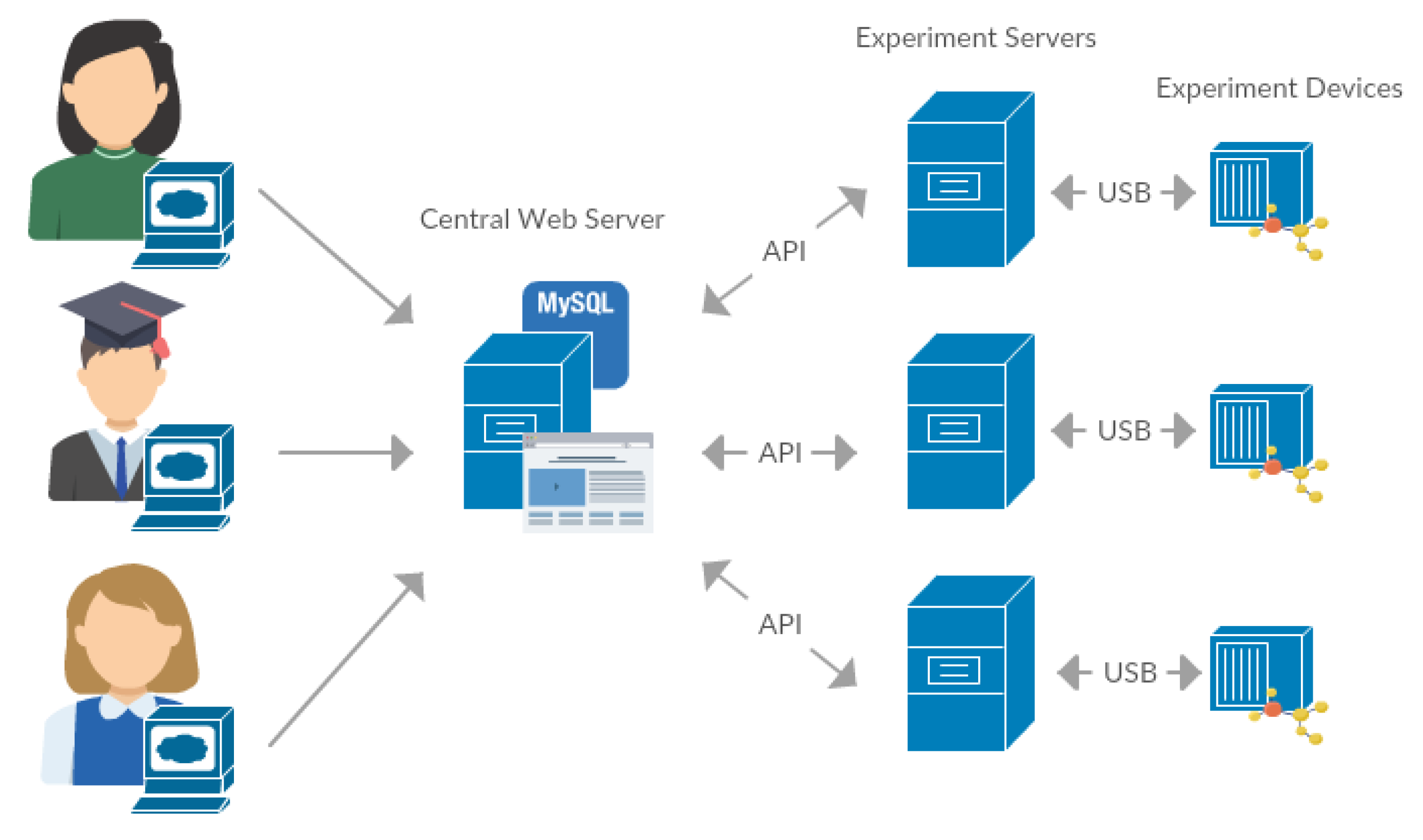
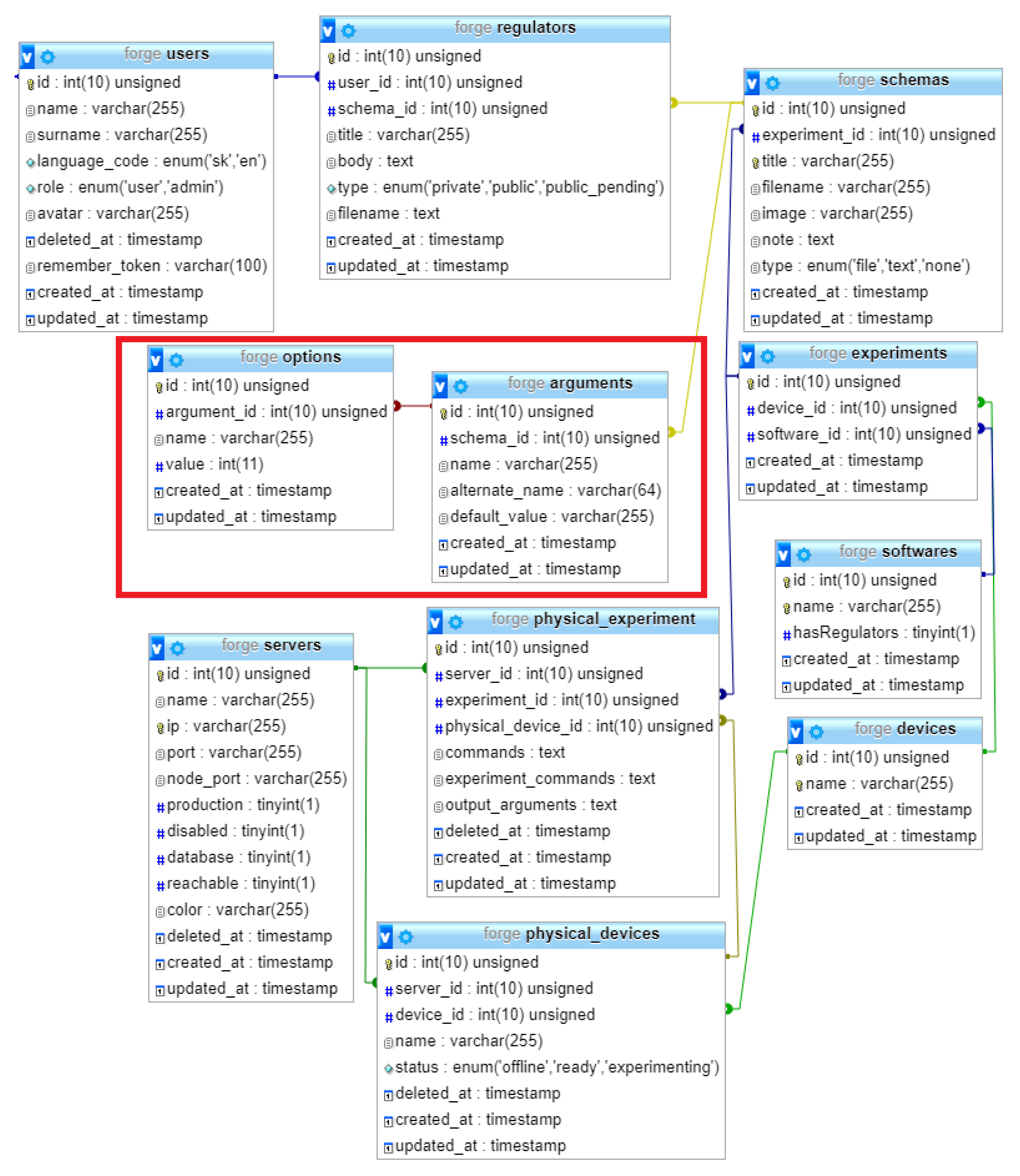
2. Laboratory Architecture and Data Flow
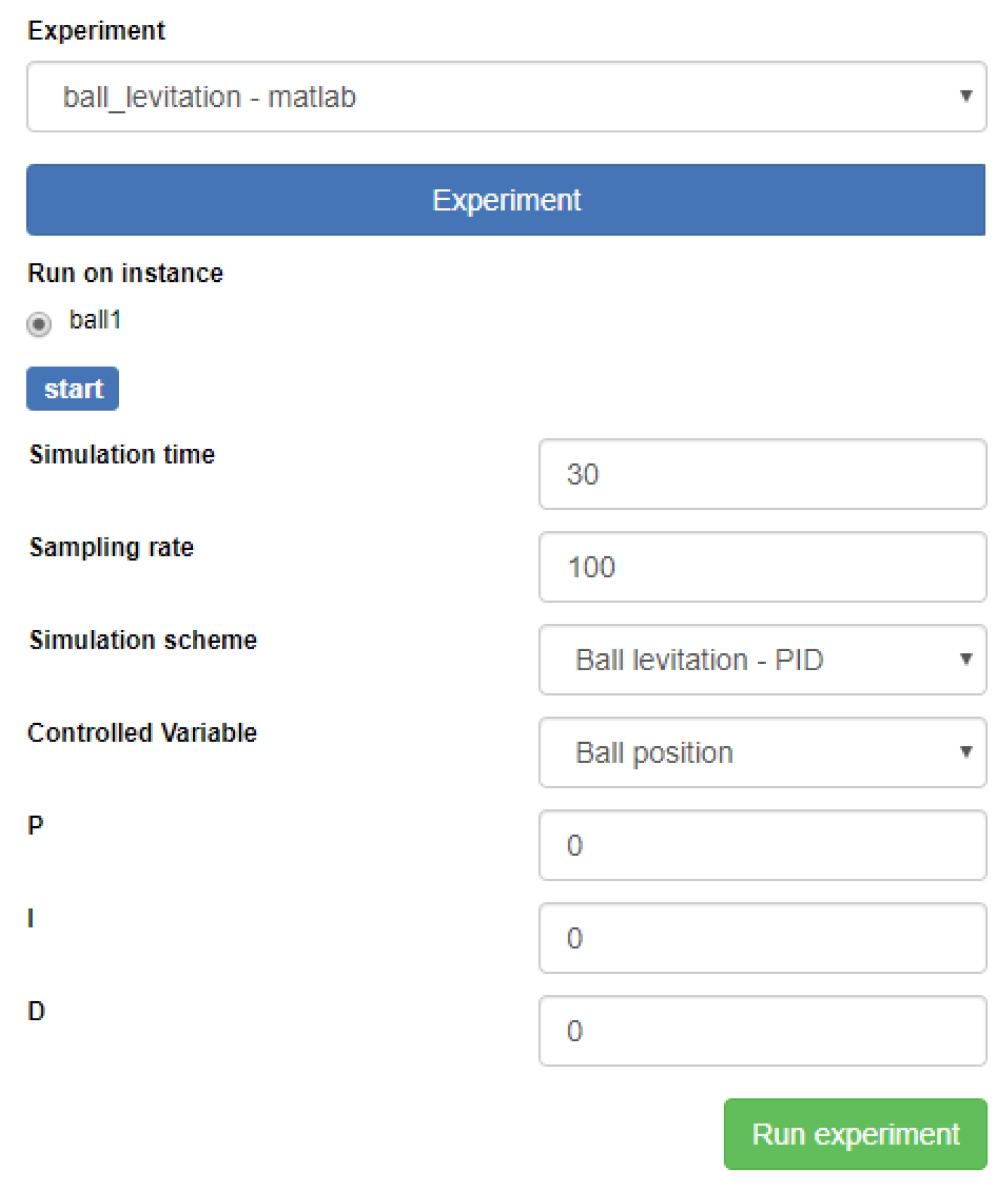
2.1. Commands and Parameters
2.1.1. Identifying Parameters
2.1.2. General Parameters
2.1.3. Experiment Specific Parameters
2.1.4. Schema Specific Parameters
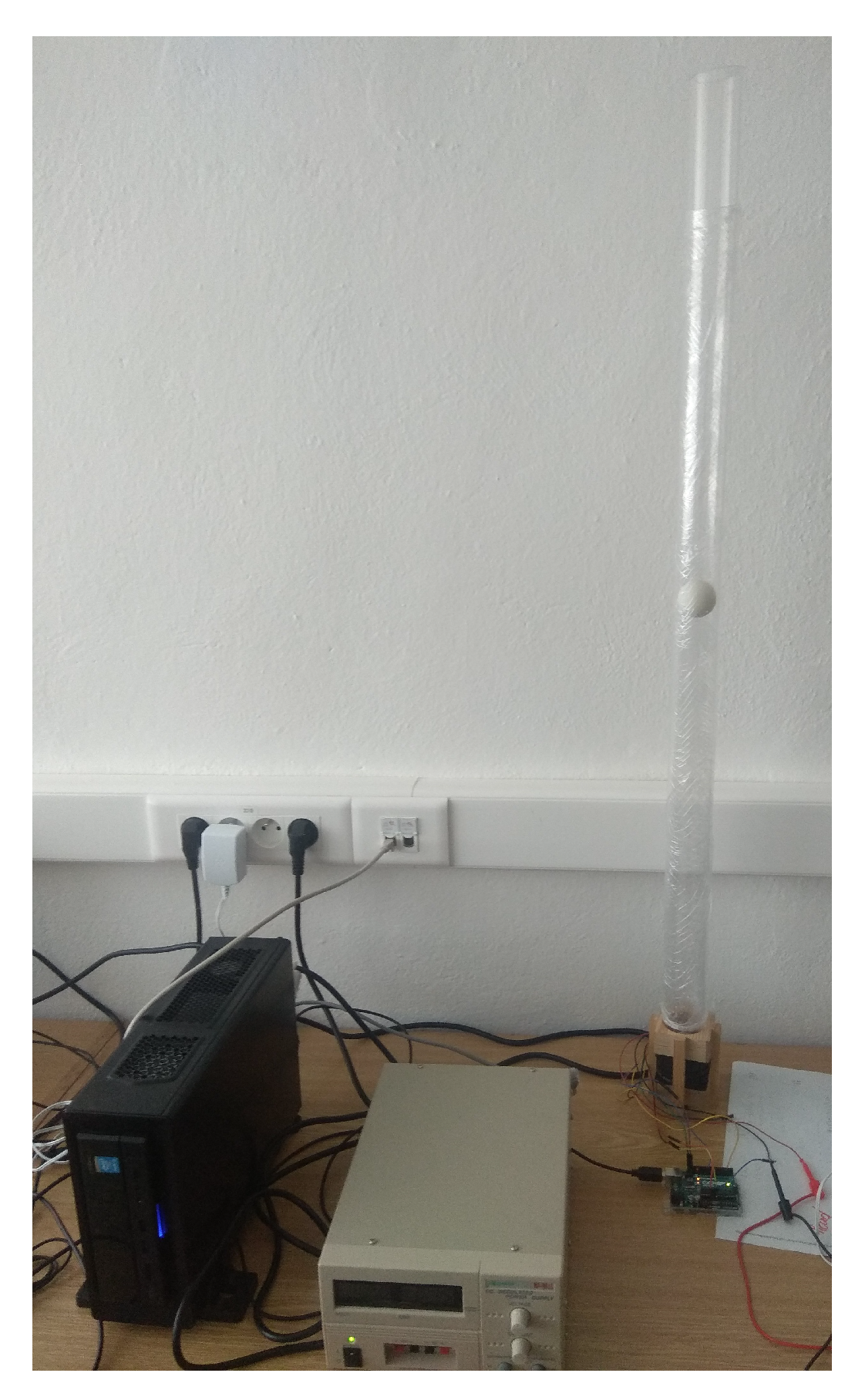
2.2. Connected Device
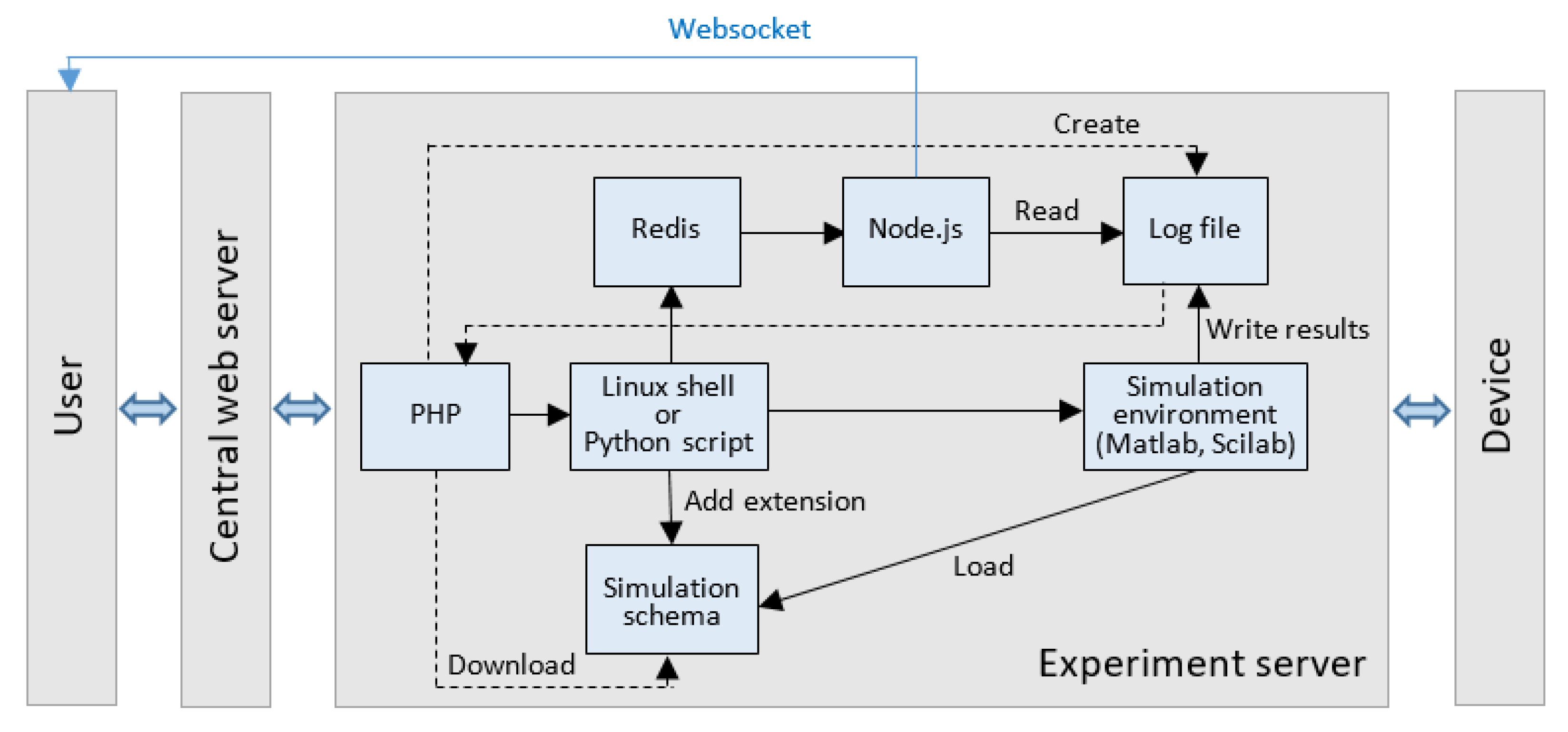
3. Simulation Environment Integration
3.1. Linux Shell Script Interface
3.2. Matlab
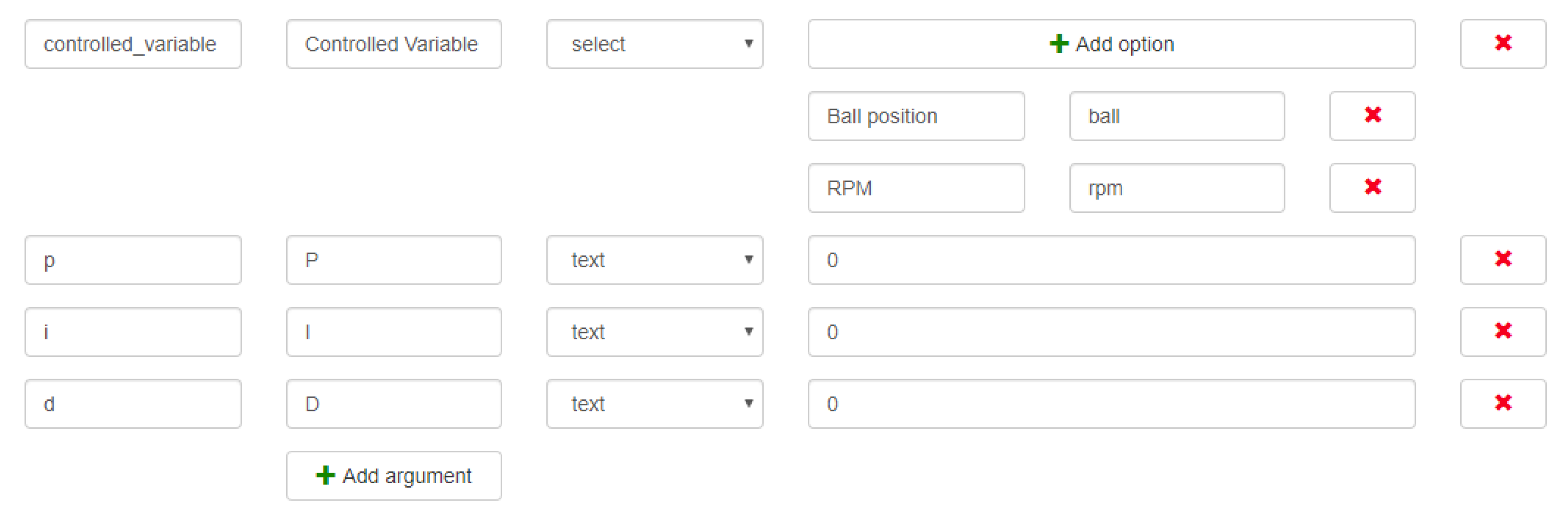
4. Passing Arguments
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Chen, S.; Chen, R.; Ramakrishnan, V.; Hu, S.; Zhuang, Y.; Ko, C.; Chen, B.M. Development of remote laboratory experimentation through Internet. In Proceedings of the 1999 IEEE Hong Kong Symposium on Robotics and Control, Hong Kong, China, 2–3 July 1999; Volume 2, pp. 756–760. [Google Scholar]
- Scanlon, E.; Colwell, C.; Cooper, M.; Di Paolo, T. Remote experiments, re-versioning and re-thinking science learning. Comput. Educ. 2004, 43, 153–163. [Google Scholar] [CrossRef]
- Garcia-Zubia, J.; Gomes, L. (Eds.) Advances on Remote Laboratories and E-Learning Experiences; University of Deusto: Bilbao, Spain, 2007. [Google Scholar]
- Garcia-Zubia, J.; Alves, G.R. (Eds.) Using Remote Labs in Education: Two Little Ducks in Remote Experimentation; University of Deusto: Bilbao, Spain, 2011. [Google Scholar]
- Restivo, M.T.; Cardoso, A. Exploring online experimentation. Int. J. Online Eng. 2013, 9, 4–6. [Google Scholar] [CrossRef]
- Heradio, R.; de la Torre, L.; Galan, D.; Cabrerizo, F.J.; Herrera-Viedma, E.; Dormido, S. Virtual and remote labs in education: A bibliometric analysis. Comput. Educ. 2016, 98, 14–38. [Google Scholar] [CrossRef]
- Heradio, R.; de la Torre, L.; Dormido, S. Virtual and remote labs in control education: A survey. Ann. Rev. Control 2016, 42, 1–10. [Google Scholar] [CrossRef]
- Zutin, D.G.; Auer, M.E.; Maier, C.; Niederstätter, M. Lab2go—A repository to locate educational online laboratories. In Proceedings of the IEEE EDUCON 2010 Conference, Madrid, Spain, 14–16 April 2010; pp. 1741–1746. [Google Scholar] [CrossRef]
- IEEE Standards Association. IEEE Standard for Networked Smart Learning Objects for Online Laboratories; No: 1876-2019. Available online: https://standards.ieee.org/standard/1876-2019.html (accessed on 22 February 2020).
- Papcun, P.; Zolotova, I.; Tafsi, K. Control and Teleoperation of Robot Khepera via Android Mobile Device through Bluetooth and WiFi. IFAC-PapersOnLine 2016, 49, 188–193. [Google Scholar] [CrossRef]
- Rábek, M.; Žáková, K. Online laboratory manager for remote experiments in control. IFAC-PapersOnLine 2017, 50, 13492–13497. [Google Scholar] [CrossRef]
- Chacon, J.; Saenz, J.; Torre, L.; Diaz, J.; Esquembre, F. Design of a low-cost air levitation system for teaching control engineering. Sensors 2017, 17, 2321. [Google Scholar] [CrossRef] [PubMed]
- Jernigan, S.R.; Fahmy, Y.; Buckner, G.D. Implementing a remote laboratory experience into a joint engineering degree program: Aerodynamic levitation of a beach ball. IEEE Trans. Educ. 2008, 52, 205–213. [Google Scholar] [CrossRef]
- Chaos, D.; Chacon, J.; Aranda-Escolástico, E.; Dormido, S. Robust switched control of an air levitation system with minimum sensing. ISA Trans. 2019, 96, 327–336. [Google Scholar] [CrossRef] [PubMed]
- Chołodowicz, E.; Orłowski, P. Low-cost air levitation laboratory stand using MATLAB/Simulink and Arduino. Pomiary Automatyka Robotyka 2017, 21, 33–39. [Google Scholar] [CrossRef]
- Berisch, G.; Donath, H.; Heinrich, F.; Huebener, I.; Lipke, T.; Mende, T.; Schriefer, M.; Schulte, H.; Zajac, M. Design and Development of a Low Cost Rapid Control Prototyping System Applied to an Air Suspension System. IFAC Proc. Vol. 2012, 45, 194–199. [Google Scholar] [CrossRef]
- Rábek, M.; Žáková, K. Building of the fan driven ball levitation system. IFAC-PapersOnLine 2019, 52, 283–287. [Google Scholar] [CrossRef]
- Rábek, M.; Žáková, K. Integration of new control experiments to online environment. In Proceedings of the 5th Experiment@ International Conference (exp.at’19), Funchal, Portugal, 12–14 June 2019; pp. 80–84. [Google Scholar] [CrossRef]
- Rábek, M.; Žáková, K. Simple experiment integration into modular online laboratory enviroment. In Proceedings of the 4th Experiment@ International Conference (exp. at’17), Faro, Portugal, 6–8 June 2017; pp. 264–268. [Google Scholar]
- Huba, T.; Huba, M.; Bisták, P.; Tapak, P. New thermo-optical plants for laboratory experiments. IFAC Proc. Vol. 2014, 47, 9013–9018. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Title | Provider | Area | Address |
|---|---|---|---|
| iLab | Massachusetts Institute of Technology (MIT), USA | Microelectronics, chemical engineering, signal processing | https://icampus.mit.edu/projects/ilabs |
| UNILabs | National Distance Education University (UNED), Spain | Physics, mechatronics, optics, robotics, control | http://unilabs.dia.uned.es |
| WebLab Deusto | University of Deusto, Spain | Electronics, physics | http://weblab.deusto.es |
| NetLabs | University of South Australia | Electronics | http://netlab.unisa.edu.au |
| RExLab | Federal University of Santa Catarina, Brasil | Electronics, optics, physics | http://relle.ufsc.br/labs |
| GOLDi | Ilmenau University of Technology, Germany | Robotics, mechatronics | http://goldi-labs.net |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rábek, M.; Žáková, K. Development of Control Experiments for an Online Laboratory System. Information 2020, 11, 131. https://doi.org/10.3390/info11030131
Rábek M, Žáková K. Development of Control Experiments for an Online Laboratory System. Information. 2020; 11(3):131. https://doi.org/10.3390/info11030131
Chicago/Turabian StyleRábek, Matej, and Katarína Žáková. 2020. "Development of Control Experiments for an Online Laboratory System" Information 11, no. 3: 131. https://doi.org/10.3390/info11030131
APA StyleRábek, M., & Žáková, K. (2020). Development of Control Experiments for an Online Laboratory System. Information, 11(3), 131. https://doi.org/10.3390/info11030131