Evaluation of Push and Pull Communication Models on a VANET with Virtual Traffic Lights

 ,
,  , , ,
, , ,  ,
,
Abstract
1. Introduction
2. Related Works
3. Pull-Based Virtual Semaphore
3.1. Pedestrians and RSU
3.2. Vehicles and RSU
3.3. Flowcharts
3.3.1. Flowchart of RSUs
3.3.2. Flowchart of Pedestrians and Vehicles
4. Push-Based Virtual Semaphore
4.1. Pedestrians and RSU
4.2. Vehicles and RSU
4.3. Flowcharts
4.3.1. Flowchart of RSUs
4.3.2. Flowchart of Pedestrians and Vehicles
5. VTLS Simulation Scenario and Results
5.1. Simulation Setup
5.2. Results
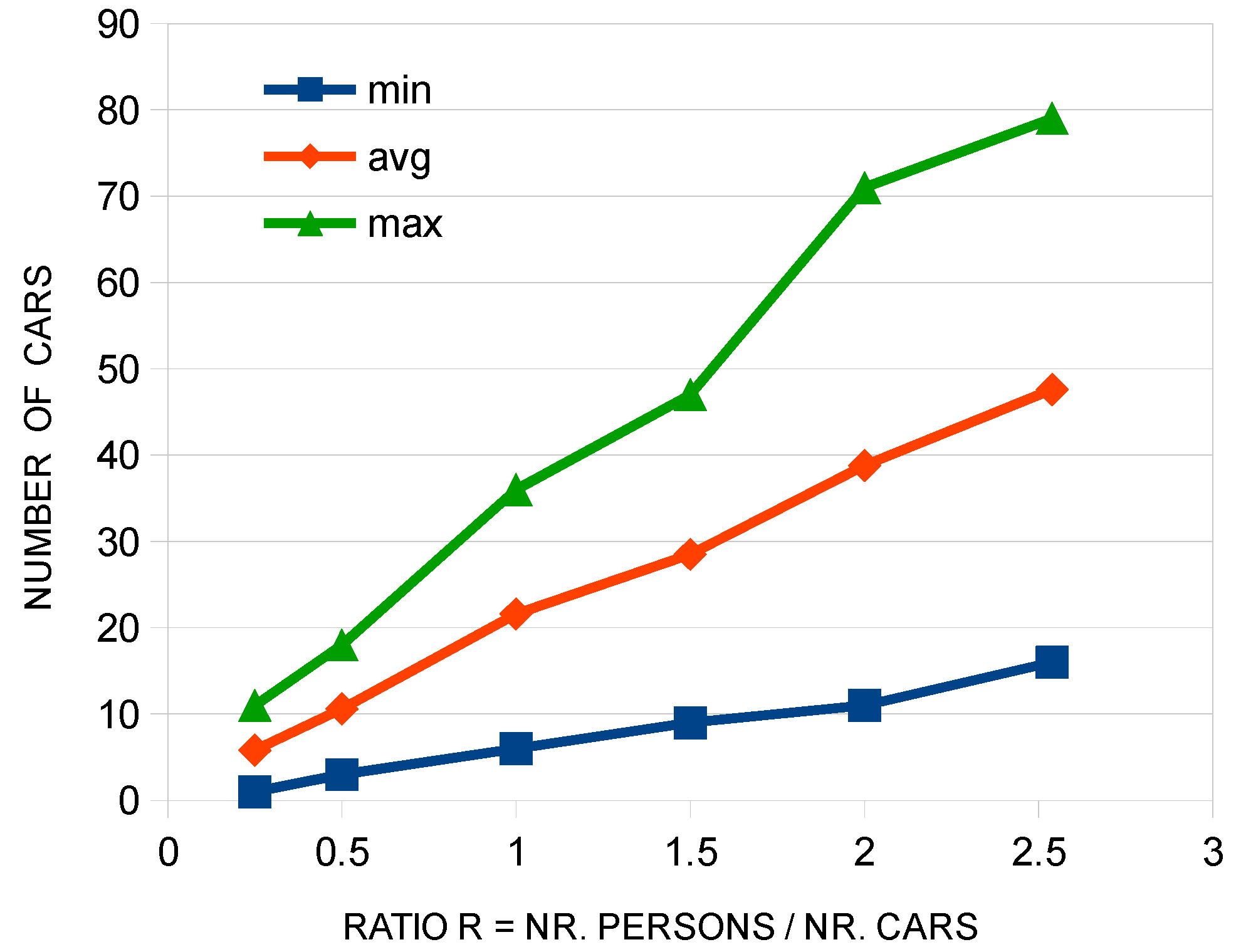
5.2.1. Average and Maximum Traffic Queue Sizes
5.2.2. Car Trip Distance
5.2.3. Car Stop Time
5.3. Communication Metrics
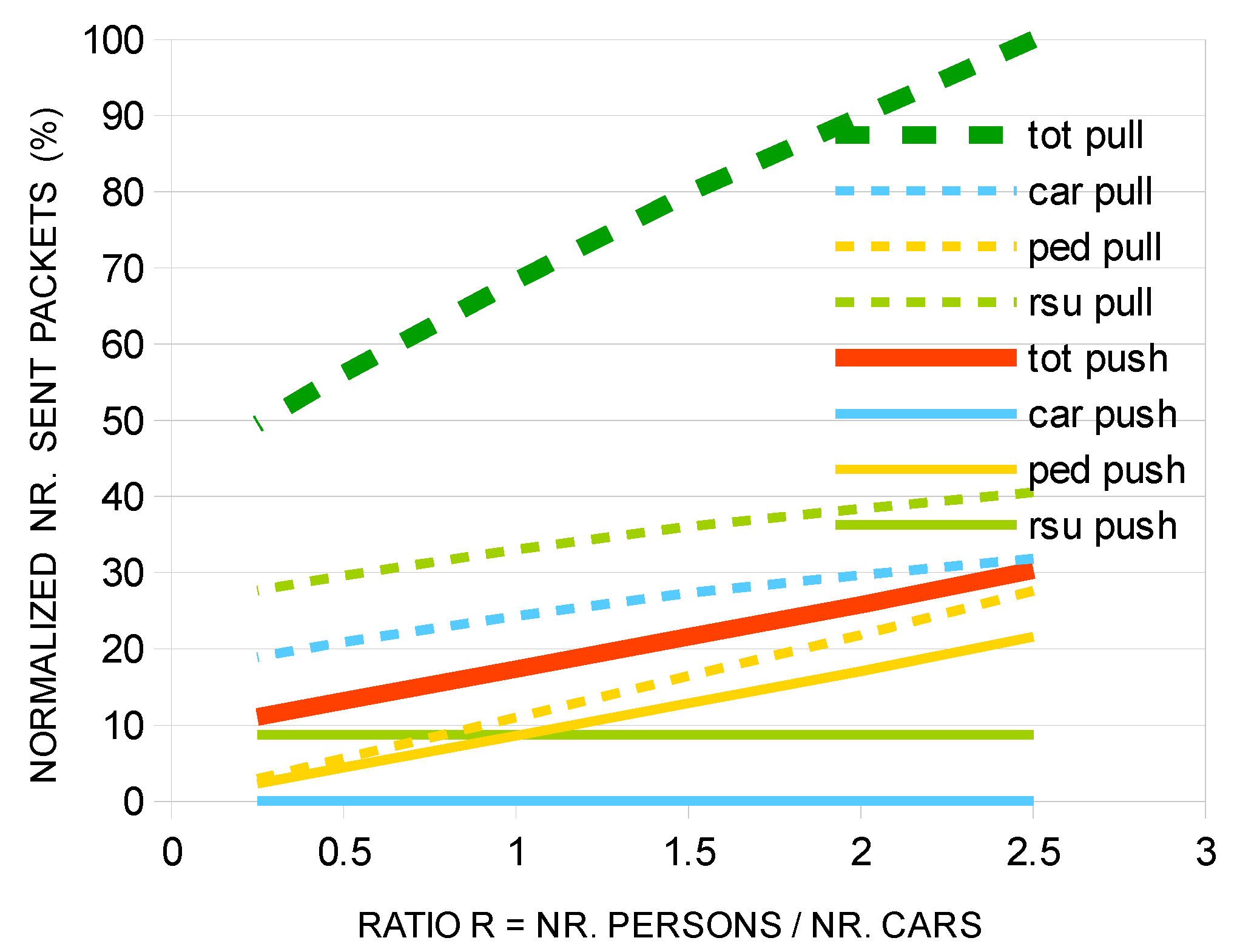
5.3.1. Sent Packets
5.3.2. Packet Loss
5.3.3. Application Message Loss
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Mobility and Transport | Road Safety. Available online: https://ec.europa.eu/transport/road_safety/ (accessed on 30 September 2020).
- Zhang, L.; Afanasyev, A.; Burke, J.; Jacobson, V.; Claffy, K.C.; Crowley, P.; Lan Wang, L.; Zhang, B. Named data networking. Comput. Commun. Rev. 2014. [Google Scholar] [CrossRef]
- Sewalkar, P.; Seitz, J. Vehicle-to-Pedestrian Communication for Vulnerable Road Users: Survey, Design Considerations, and Challenges. Sensors 2019, 19, 358. [Google Scholar] [CrossRef] [PubMed]
- Khelifi, H.; Luo, S.; Nour, B.; Moungla, H.; Faheem, Y.; Hussain, R.; Ksentini, A. Named Data Networking in Vehicular Ad hoc Networks: State-of-the-Art and Challenges. Commun. Surv. Tutor. 2019. [Google Scholar] [CrossRef]
- Al-qutwani, M.; Wang, X. Smart Traffic Lights over Vehicular Named Data Networking. Information 2019, 10, 83. [Google Scholar] [CrossRef]
- Ferreira, M.; Fernandes, R.; Conceição, H.; Viriyasitavat, W.; Tonguz, O.K. Self-organized traffic control. In Proceedings of the Annual International Conference on Mobile Computing and Networking, Mobicom, Chicago, IL, USA, 20–24 September 2010; pp. 85–89. [Google Scholar]
- Chou, L.-D.; Jin-Hua, J.-Y.; Tseng, Y. Adaptive Virtual Traffic Light based on Vanets for Mitigating Congestion in Smart City. In Proceedings of the third International Conference on Digital Information and Communication Technology and its Applications, Dijon, France, 21–23 June 2011; pp. 40–44. [Google Scholar]
- Münst, W.; Dannheim, C.; Mäder, M.; Gay, N.; Malnar, B.; Al-Mamun, M.; Icking, C. Virtual traffic lights: Managing intersections in the cloud. In Proceedings of the 2015 7th International Workshop on Reliable Networks Design and Modeling, Munich, Germany, 5–7 October 2015; pp. 329–334. [Google Scholar]
- Bazzi, A.; Zanella, A.; Masini, B.M. A distributed virtual traffic light algorithm exploiting short range V2V communications. Ad Hoc Netw. 2016, 49, 42–57. [Google Scholar] [CrossRef]
- Cai, Z.; Deng, Z.; Li, J.; Zhang, J.; Liang, M. An Intersection Signal Control Mechanism Assisted by Vehicular Ad Hoc Networks. Electronics 2019, 8, 1402. [Google Scholar] [CrossRef]
- Chang, H.J.; Park, G.T. A study on traffic signal control at signalized intersections in vehicular ad hoc networks. Ad Hoc Netw. 2013, 11, 2115–2124. [Google Scholar] [CrossRef]
- Shi, J.; Peng, C.; Zhu, Q.; Duan, P.; Bao, Y.; Xie, M. There is a Will, There is a Way: A New Mechanism for Traffic Control Based on VTL and VANET. In Proceedings of the IEEE International Symposium on High Assurance Systems Engineering, Daytona Beach, FL, USA, 8–10 January 2015; pp. 240–246. [Google Scholar]
- Burke, J.; Gasti, P.; Nathan, N.; Tsudik, G. Secure sensing over named data networking. In Proceedings of the 2014 IEEE 13th International Symposium on Network Computing and Applications, Cambridge, MA, USA, 21–23 August 2014; pp. 175–180. [Google Scholar]
- Mori, K.; Kamimoto, T.; Shigeno, H. Push-based traffic-aware cache management in named data networking. In Proceedings of the 2015 18th International Conference on Network-Based Information Systems, NBiS 2015, Taipei, Taiwan, 2–4 September 2015; pp. 309–316. [Google Scholar]
- Amadeo, M.; Campolo, C.; Molinaro, A. Internet of Things via Named Data Networking: The support of push traffic. In Proceedings of the 2014 International Conference on the Network of the Future, Paris, France, 3–5 December 2014. [Google Scholar]
- Majeed, M.F.; Ahmed, S.H.; Dailey, M.N. Enabling push-based critical data forwarding in vehicular named data networks. IEEE Commun. Lett. 2017. [Google Scholar] [CrossRef]
- ETSI TR 103 300-1 V2.1.1 (2019-09)-Intelligent Transport System (ITS); Vulnerable Road Users (VRU) Awareness; Part 1: Use Cases Definition; Release 2. Available online: https://standards.iteh.ai/catalog/standards/etsi/8b7acf23-d5b3-4c9b-ae81-4865b45f22a5/etsi-tr-103-300-1-v2.1.1-2019-09 (accessed on 25 October 2020).
- Interest Packet—NDN Packet Format Specification Version 0.3. Available online: https://named-data.net/doc/NDN-packet-spec/current/interest.html (accessed on 30 September 2020).
- Grassi, G.; Pesavento, D.; Pau, G.; Vuyyuru, R.; Wakikawa, R.; Zhang, L. VANET via named data networking. In Proceedings of the 2014 IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Toronto, ON, Canada, 27 April–2 May 2014. [Google Scholar]
- Deng, G.; Xie, X.; Shi, L.; Li, R. Hybrid information forwarding in VANETs through named data networking. In Proceedings of the IEEE International Symposium on Personal, Indoor and Mobile Radio Communications, Istanbul, Turkey, 8–11 September 2019. [Google Scholar]
- Duarte, J.M.; Braun, T.; Villas, L.A. Receiver mobility in vehicular named data networking. In Proceedings of the 2017 Workshop on Mobility in the Evolving Internet Architecture, Part of SIGCOMM 2017, Los Angeles, CA, USA, 25 August 2017. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| road grid size | 7 × 7 | ndn_car_dst_to_road_end | 18 m |
| nr. of virtual semaphores | 25 | ndn_car_interest_mesg_period | 0.5 s |
| road length | 200 m | ndn_rsu_interest_mesg_period | 0.5 s |
| min. car trip distance | 2000 m | wsm_rsu_beacon_tx_period | 0.5 s |
| max. pedestrian trip distance | 1000 m | wsm_person_mesg_period | 0.5 s |
| road limit velocity | 10 m/s | person_dst_to_road_end | 4 m |
| pedestrian maximum velocity | 1.5 m/s | person_dst_from_road_start | 4 m |
| car acceleration | 3 m/s2 | physical thermal noise | −110 dBm |
| car deceleration | 10 m/s2 | physical noise floor | −98 dBm |
| simulation time per test | 500 s | physical minimum power level | −85 dBm |
| car generation period | 1 s | wireless communication protocol | WSMP/IEEE 802.11p |
| pedestrian generation period | 0.26, 0.33, 0.44, 0.66, 1.32, 2.64 s | transmission power | 20 mW |
| number of simulation sets | 35 | transmission bit rate | 6 Mbps |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gama, O.; Santos, A.; Costa, A.; Nicolau, M.J.; Dias, B.; Macedo, J.; Ribeiro, B.; Goncalves, F.; Simoes, J. Evaluation of Push and Pull Communication Models on a VANET with Virtual Traffic Lights. Information 2020, 11, 510. https://doi.org/10.3390/info11110510
Gama O, Santos A, Costa A, Nicolau MJ, Dias B, Macedo J, Ribeiro B, Goncalves F, Simoes J. Evaluation of Push and Pull Communication Models on a VANET with Virtual Traffic Lights. Information. 2020; 11(11):510. https://doi.org/10.3390/info11110510
Chicago/Turabian StyleGama, Oscar, Alexandre Santos, Antonio Costa, Maria João Nicolau, Bruno Dias, Joaquim Macedo, Bruno Ribeiro, Fabio Goncalves, and Joao Simoes. 2020. "Evaluation of Push and Pull Communication Models on a VANET with Virtual Traffic Lights" Information 11, no. 11: 510. https://doi.org/10.3390/info11110510
APA StyleGama, O., Santos, A., Costa, A., Nicolau, M. J., Dias, B., Macedo, J., Ribeiro, B., Goncalves, F., & Simoes, J. (2020). Evaluation of Push and Pull Communication Models on a VANET with Virtual Traffic Lights. Information, 11(11), 510. https://doi.org/10.3390/info11110510