1. Introduction
To briefly describe the MRM concept, most MRM is a federation of more than two different simulations for the user requirements. If the simulations that make up the MRM are made in different computer languages and different communication methods, then the modification cost will be increase. If building some MRM system required a prohibitive cost when they connect two or more simulations, it could mean a fail. To achieve interoperability among simulators, they need standard simulation architectures (SSA) that have been developed in order to achieve interoperability among independently developed simulations [
1]. Distributed interactive simulation (DIS), High Level Architecture (HLA), and Test and Training Enabling Architecture (TENA) are major SSAs.
The Defense Modeling and Simulation Office (DMSO) addressed the ongoing need for interoperability between new and existing simulations in the U.S. The U.S. Department of Defense (DoD) needed some standards for their military simulations. Without a standard, they could not connect their simulations easily, so they started to research about high-level architecture.
HLA is infrastructure, like a highway which already has been constructed by the government for enhancing transportation. According to Reid [
2], “The High-Level Architecture (HLA) is a current U.S. Department of Defense and an industry (IEEE-1516) 55 standard architecture for modeling and simulations. It provides a framework and set of functional rules and a common interface for integrating separate simulators and heterogeneous simulations into a large federation [
3].” HLA wants to generalize and build related efforts, such as the distributed interactive simulation (DIS) world and aggregation-level simulation protocols. The basic HLA definition was approved in 1996 as the standard technology architecture for all US Department of Defense simulations, and HLA continues to be updated today. Therefore, most military-related simulations built their simulation systems following HLA. Below, the explanation of HLA references are from Dahmann et al. [
3], unless otherwise specified.
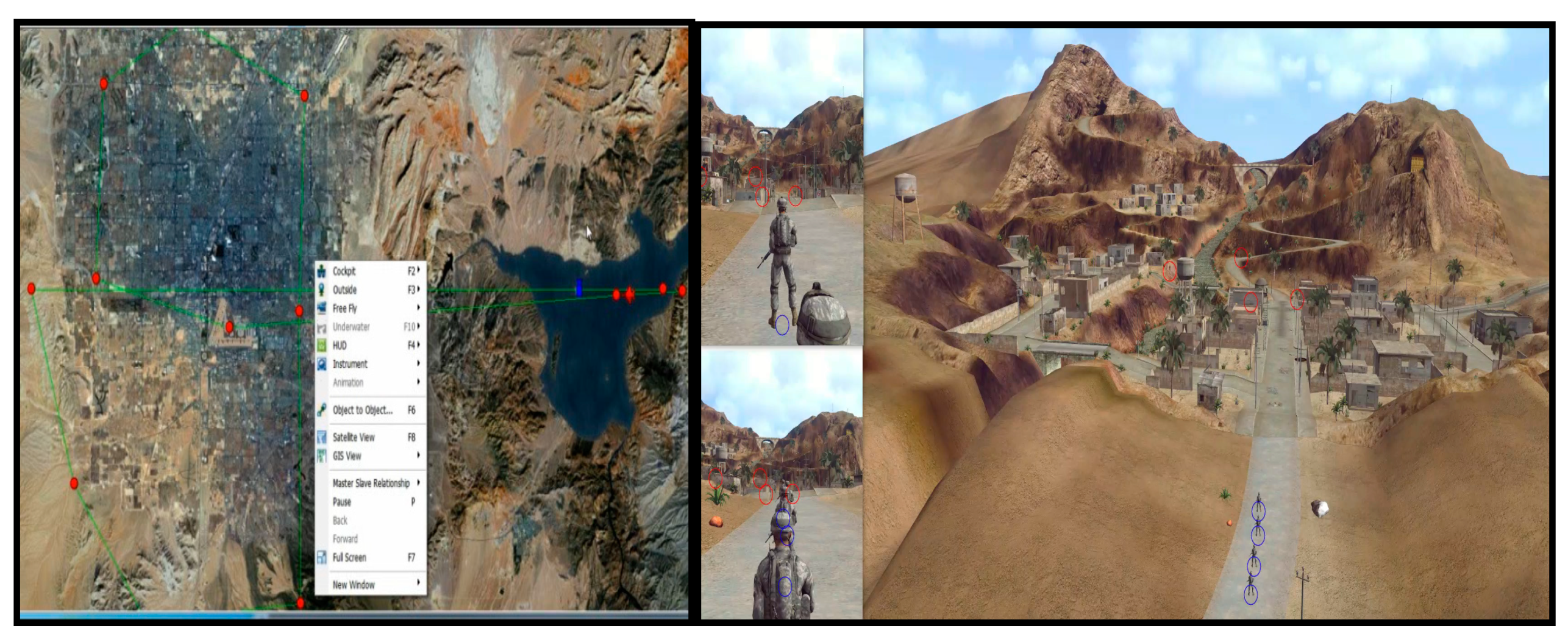
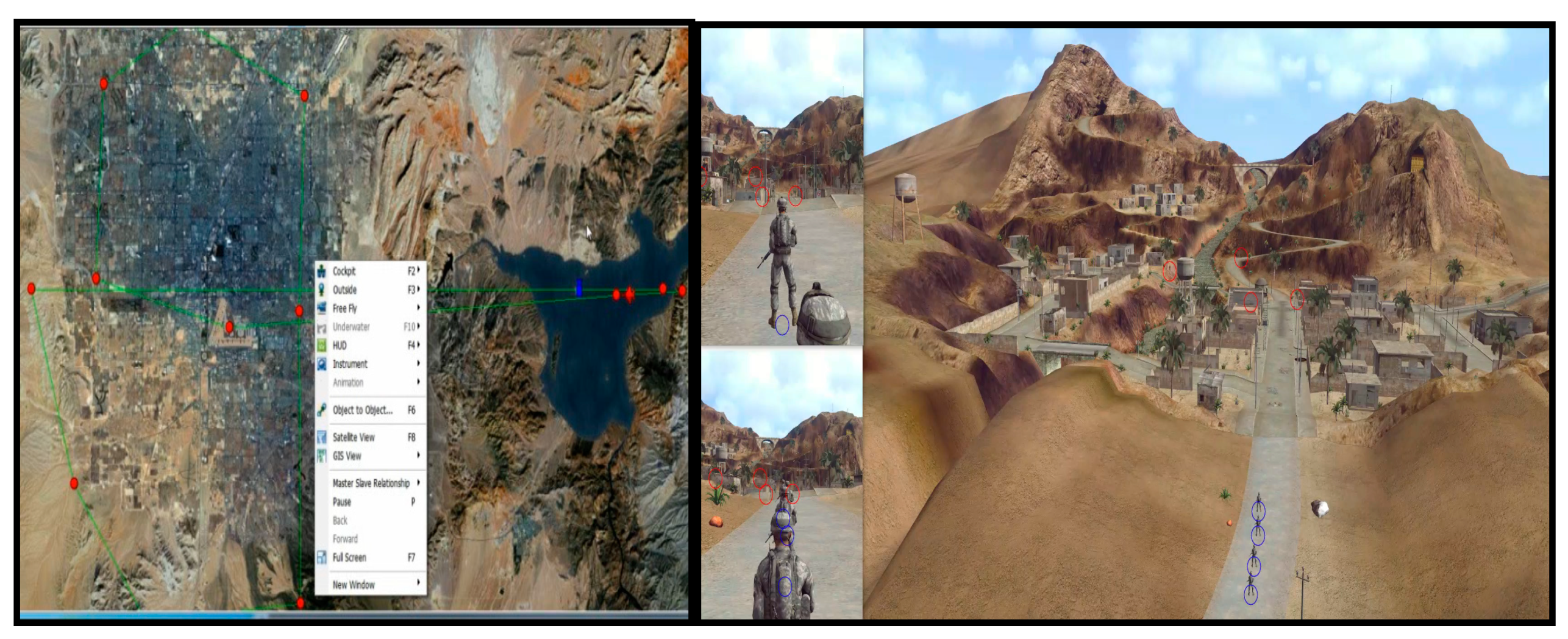
The simulations, in general, are designed to fit requirements and technical specifications (see
Figure 1). Therefore, it is difficult to get many simulations to work together synchronized in time, space, and logic. We know that each simulation has a different logic in each aspect, such as commitment, representation, time, computational characteristics, human–machine interfaces, connectivity, and objectives. For this reason, only a few studies have been conducted, despite various motivations for and the feasibility of multiple-resolution modeling (MRM). Multi-resolution modeling is highly related to composability and define multi-resolution modeling as follows [
4,
5]:
Building a single model with alternative users involving different levels of resolution for the same phenomena.
Building an integrated family of two or more mutually consistent models of the same phenomena at different levels of resolution.
Kim et al. [
6] state that an MRM approach can be conceptualized with this definition. The different levels of resolution could be implemented into a single model or family of models. These levels could be associated with the desired abstraction to describe a phenomenon. Rabelo [
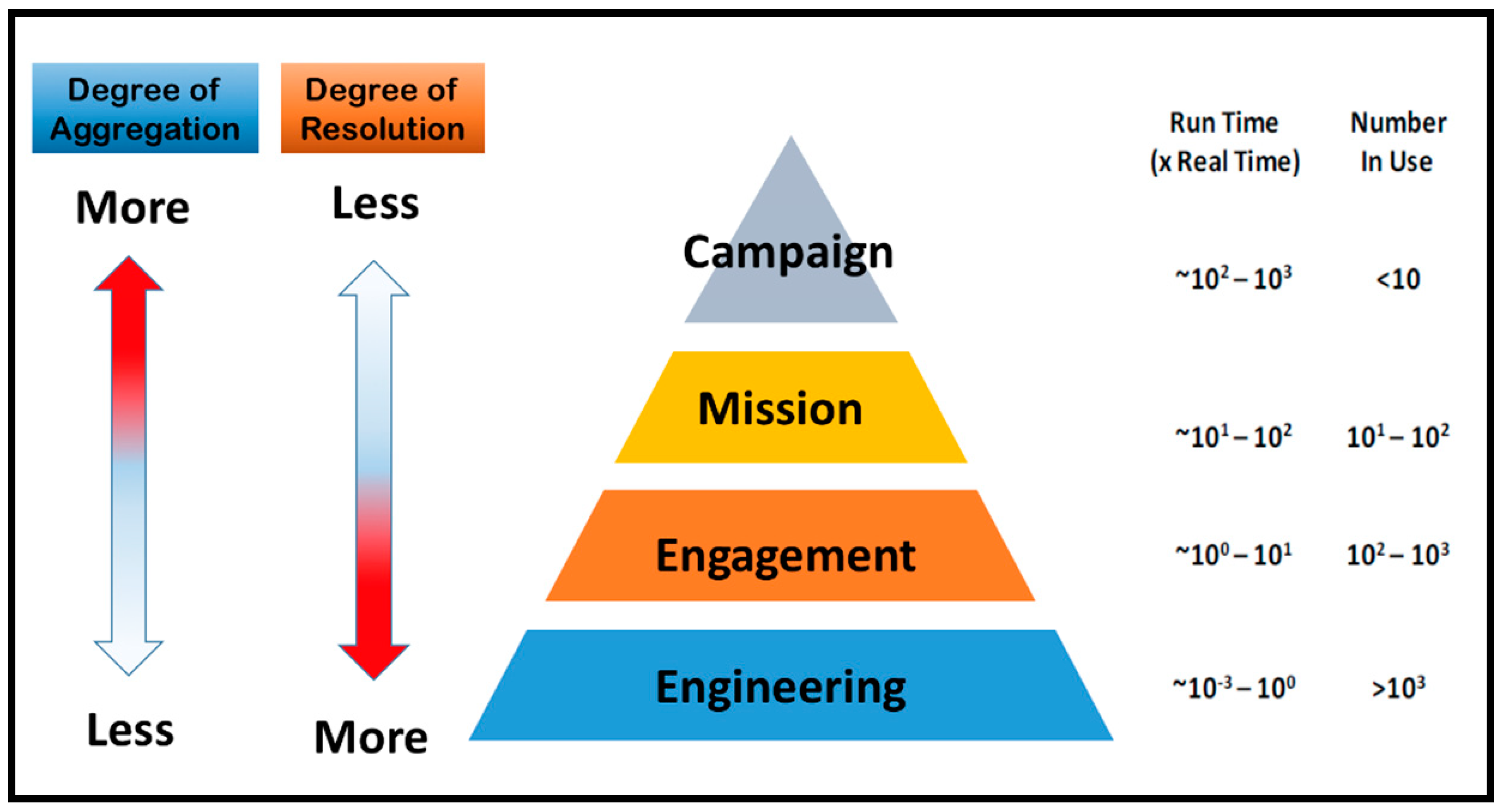
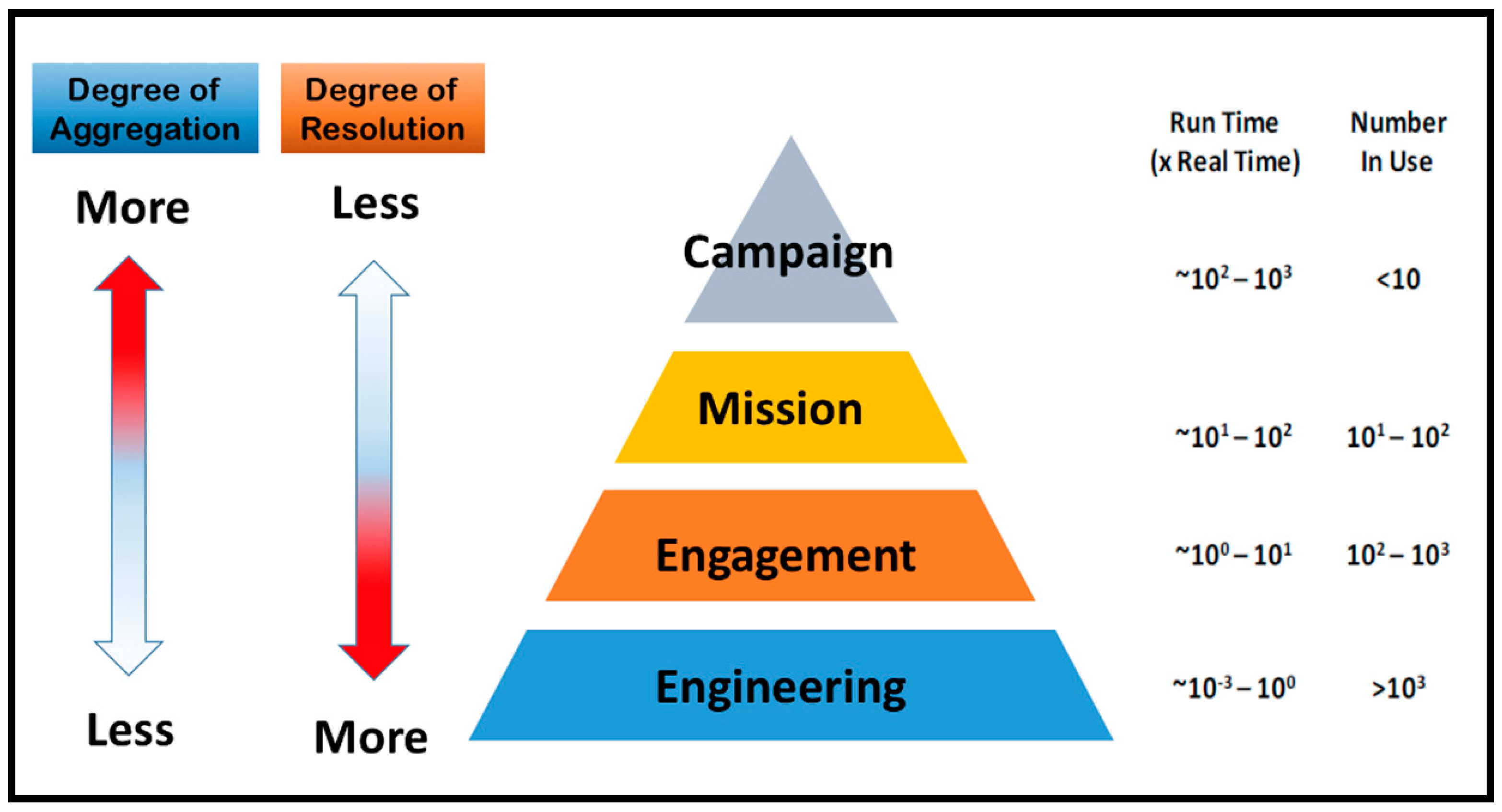
7] noted that “the level of abstraction or resolution in an MRM simulation approach can be related to the number of input/output parameters associated with a particular simulation model.”
Davis and Tolk [
4] explain that a low resolution (more abstract) model, for example, might use 3–10 parameters to describe a particular model resolution space (different dimensions). However, depending on the complexity of the simulation scenarios to be implemented, the number of parameters for a particular resolution dimension (entity level, spatial, process, etc.) in a model might increase. Meaning that, due to a particular simulation event, a higher resolution model might be triggered, providing a higher number of parameters to describe a model resolution dimension.
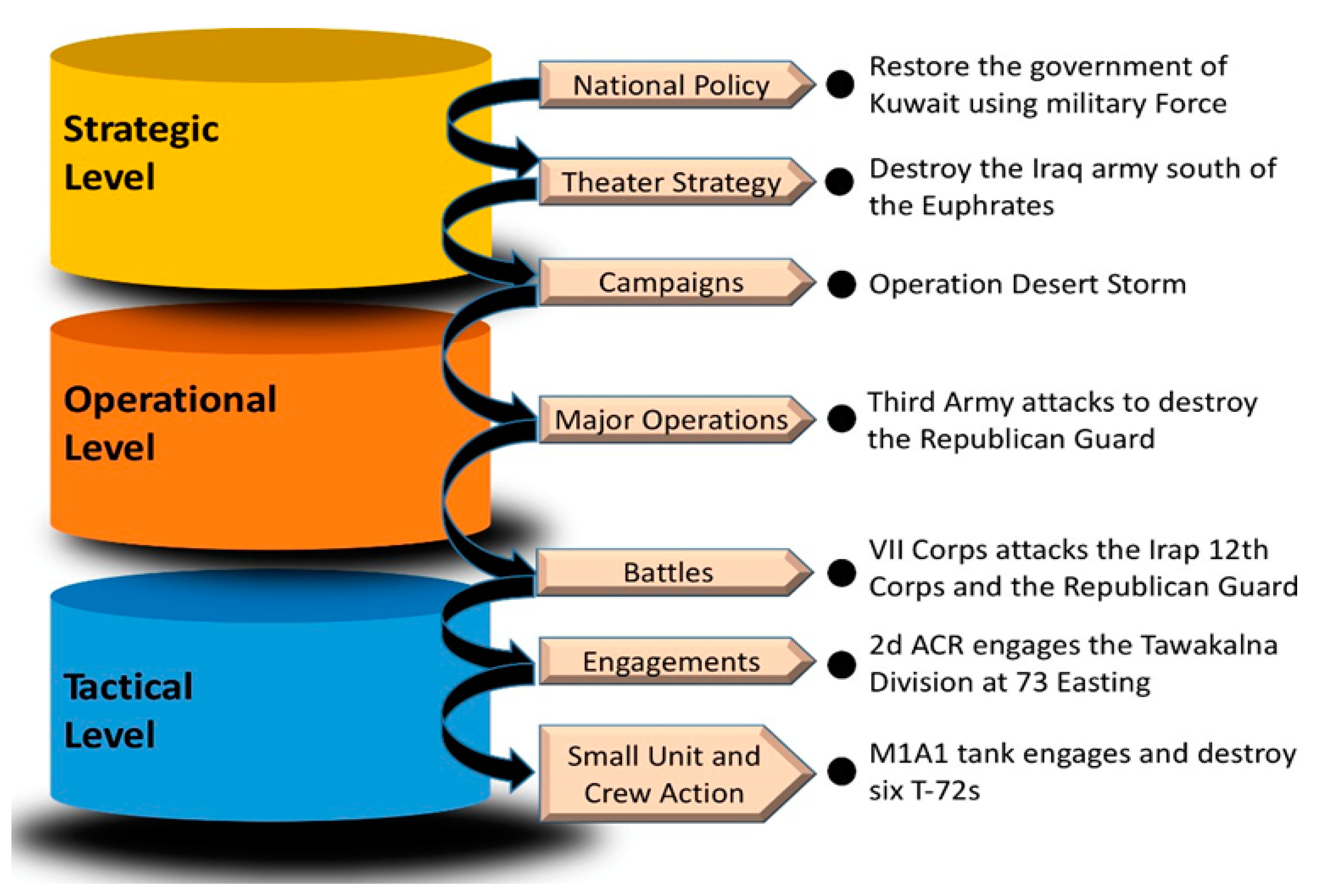
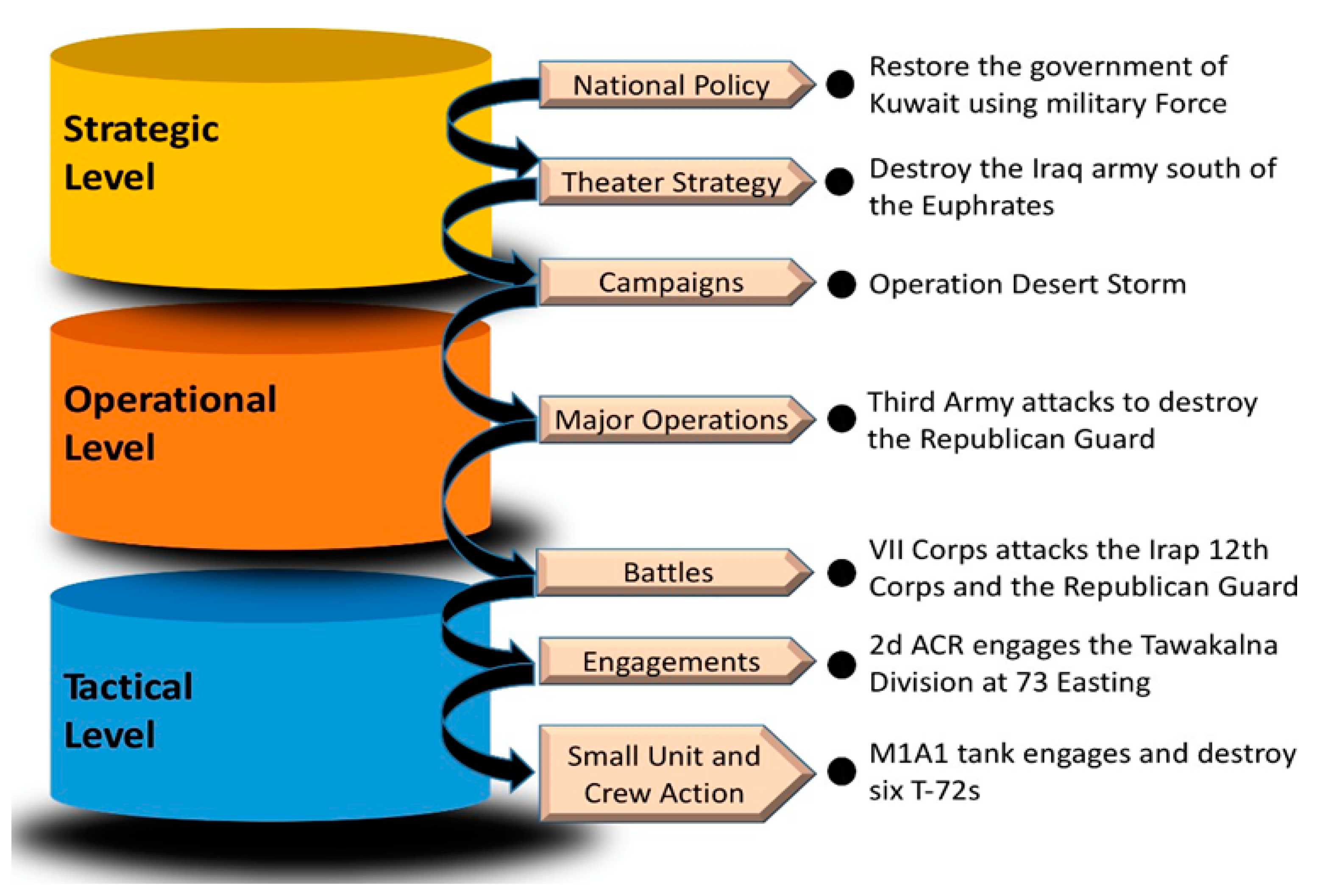
The concept of composability arises when you are devising an MRM approach implementation for a simulation system. Davis and Tolk [
4] continue to explain that the traditional approach to MRM requires a “natural decomposition” of the system simulation models. Rabelo [
7] stated that “the reason is that the MRM approach should be implemented in a hierarchical structure to support the definition of aggregate and disaggregate levels of models in a simulation” (
Figure 2).
Davis Paul and Bigelow [
5] articulated the obstacles of MRM in their paper titled “Experiments in Multiresolution Modeling” as follows:
The model developer had no guidelines for MRM design. When switching to low resolution, the poor conversion strategy discards important information degrades the MRM system.
Aggregated models sometimes yield the wrong result because of unreasonable reasons. This problem can be described as a data mapping problem or inconsistency problem.
People expect many things from the MRM system, set high standard goals, and then reject the MRM system when it fails to meet their requirements.
5. Taxonomy
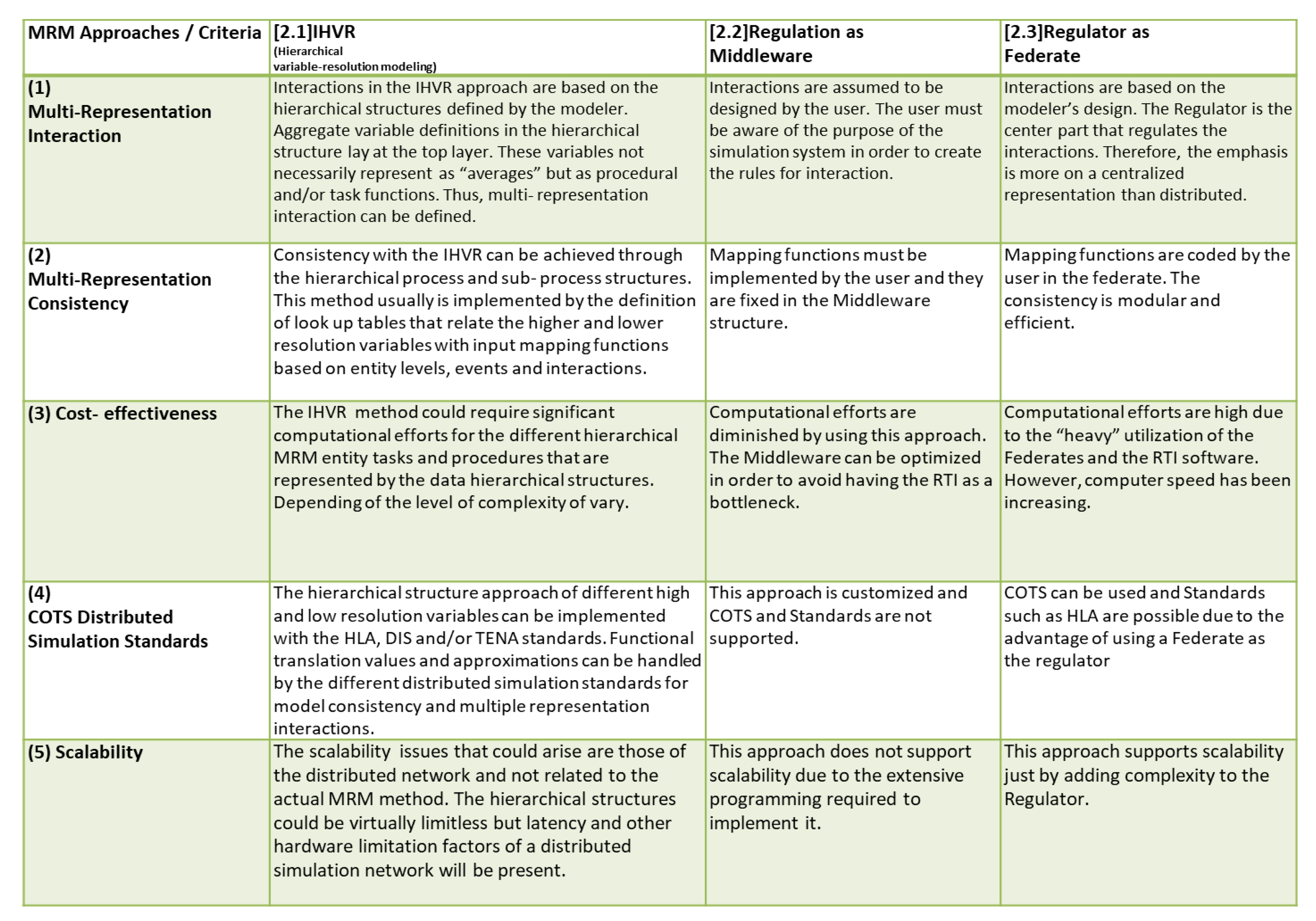
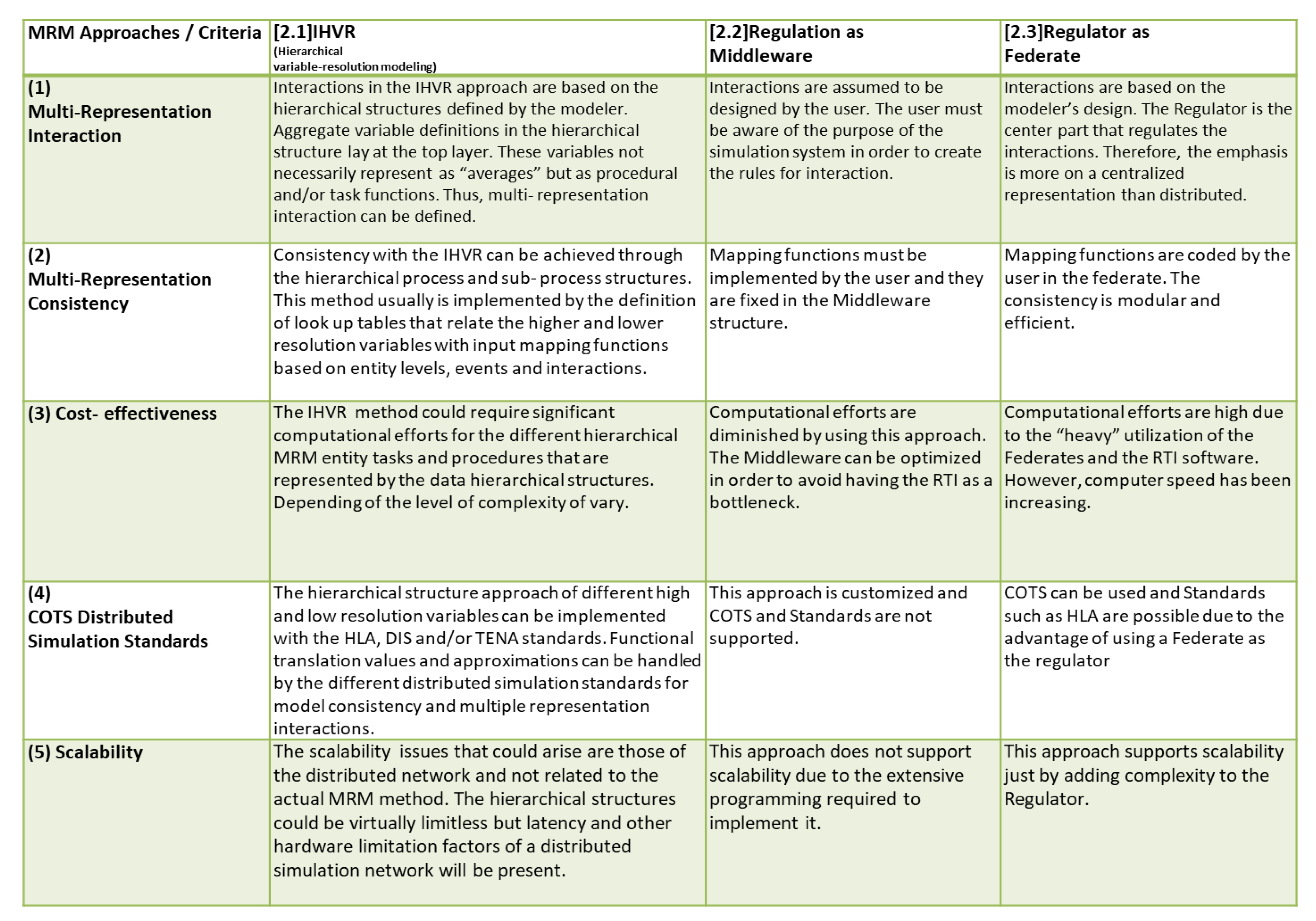
We have investigated the different approaches being used and built a unique taxonomy. They are different categories, and it will be presented in three different groups. The dimensions to compare the significant approaches to MRM are multi-representation interaction, multi-representation consistency, cost-effectiveness, the potential to use components off-the-shelf (COTS) based on distributed simulation standards, and scalability of the approach.
The first group is displayed in
Figure 4, is composed of the hierarchical variable-resolution (IHVR) modeling approach, regulation as a middleware, and regulator as a federate of a complex distributed simulation.
Integrated hierarchical variable resolution (IHVR) modeling is an MRM approach developed that describes a procedure-oriented method that uses a hierarchical variable tree. The main variables are depicted in hierarchical trees with the lowest-resolution variables at the top. This hierarchical variable tree goes from low resolution to high resolution. Therefore, aggregation is at the top, and the most disaggregated areas are at the bottom.
The regulator as middleware was introduced by Tan et al. [
16] as an alternative method instead of the module-based approach. The regulation as middleware is a system which puts the modifier, such as the aggregation/disaggregation approach, on the middleware. Thus, middleware controls the aggregation/disaggregation procedures among federates. The middleware approach attaches another layer of interface between federates and the Run Time Infrastructure (RTI). This middleware regulator layer handles all disaggregation and 35 aggregation requests from federates. Therefore, the RTI is not involved in those interactions. This method reduces the workload of the RTI.
The regulator as the federate approach is also one of the alternative methods instead of the module-based approach in Tan et al.’s [
16] paper. This approach suggests that building a regulator as a separate federate will control all required interactions of disaggregation. The regulator federate stores the database of information within itself. The regulator as federate is not only in charge of the interaction of aggregation/disaggregation, but it also decides which lower level federate associations will handle the interaction when disaggregation is needed. If it is not necessary, the federation will ignore the interaction (dynamic change), and the federation will perform normally. If necessary, federation 37 accesses the database and extracts the information that should be sent as input parameters to the low level federate that will process the disaggregation.
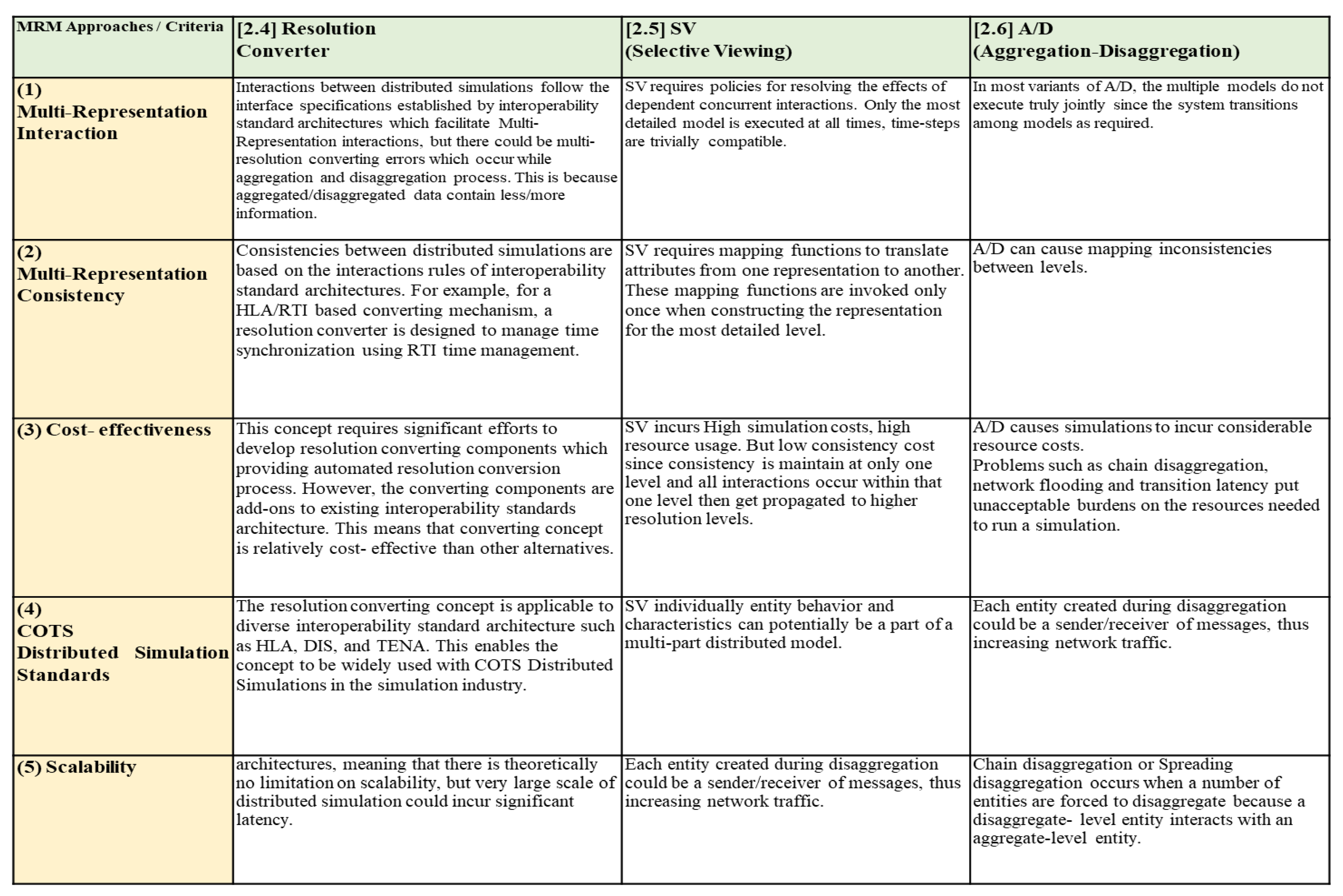
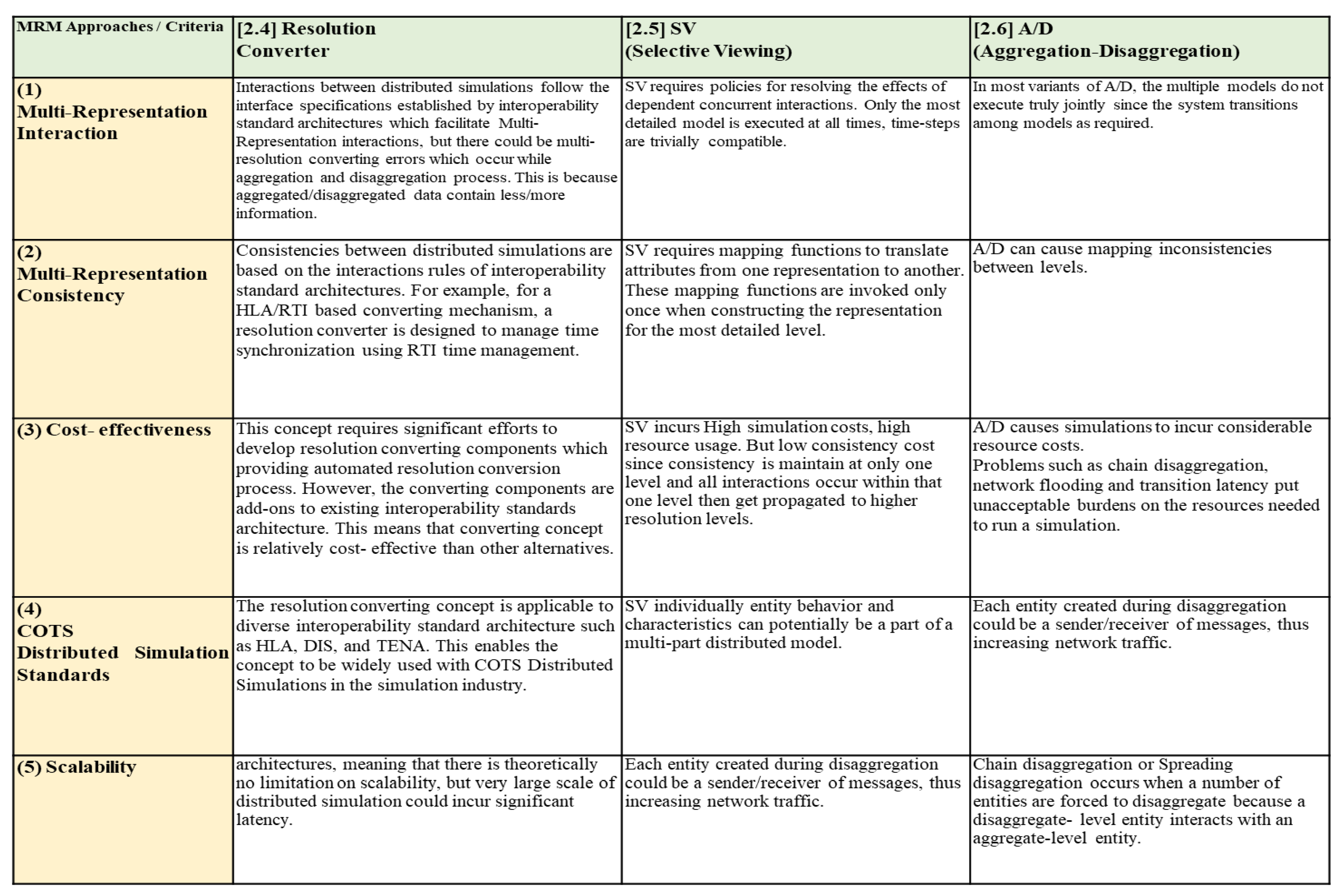
The second group as shown in
Figure 5, is composed of the resolution converter, the selective viewing (SV) approach, and the general aggregation–disaggregation approach (A/D) [
17].
The resolution converter is one of the methods to solve the problem of resolution mismatching in communication between simulators for distributed simulation of multi-resolution models. The approaches act as a solution by transforming data formats and managing time synchronization in the multi-resolution modeling.
Hong [
8] suggested developing the architecture of the multi-resolution converter to HLA/RTI to exchange data among distributed simulation models. However, the details of this concept will not be handled in this paper. It is a similar concept to the regulator which was discussed before, and can vary according to what kind of methods the system builder wants to add. Furthermore, it cannot be a cookie cutter method for every simulator or MRM system.
Selective viewing (SV) is another one of the traditional MRM approaches, in which the most detailed, highest resolution model, is running at all times, zooming and un-zooming capability presenting a display of various resolutions are included. It is based on the principle that having more detail is more important than the entities’ performance. Selective viewing depends on the highest resolution model that interacts with the low resolution model after a short while in the simulation. It is similar to the construction of model-view-controller (MVC) in software design. MVC is a software architectural pattern for 40 implementing user interfaces [
18]. It has three parts of a software application: model, view, and controller.
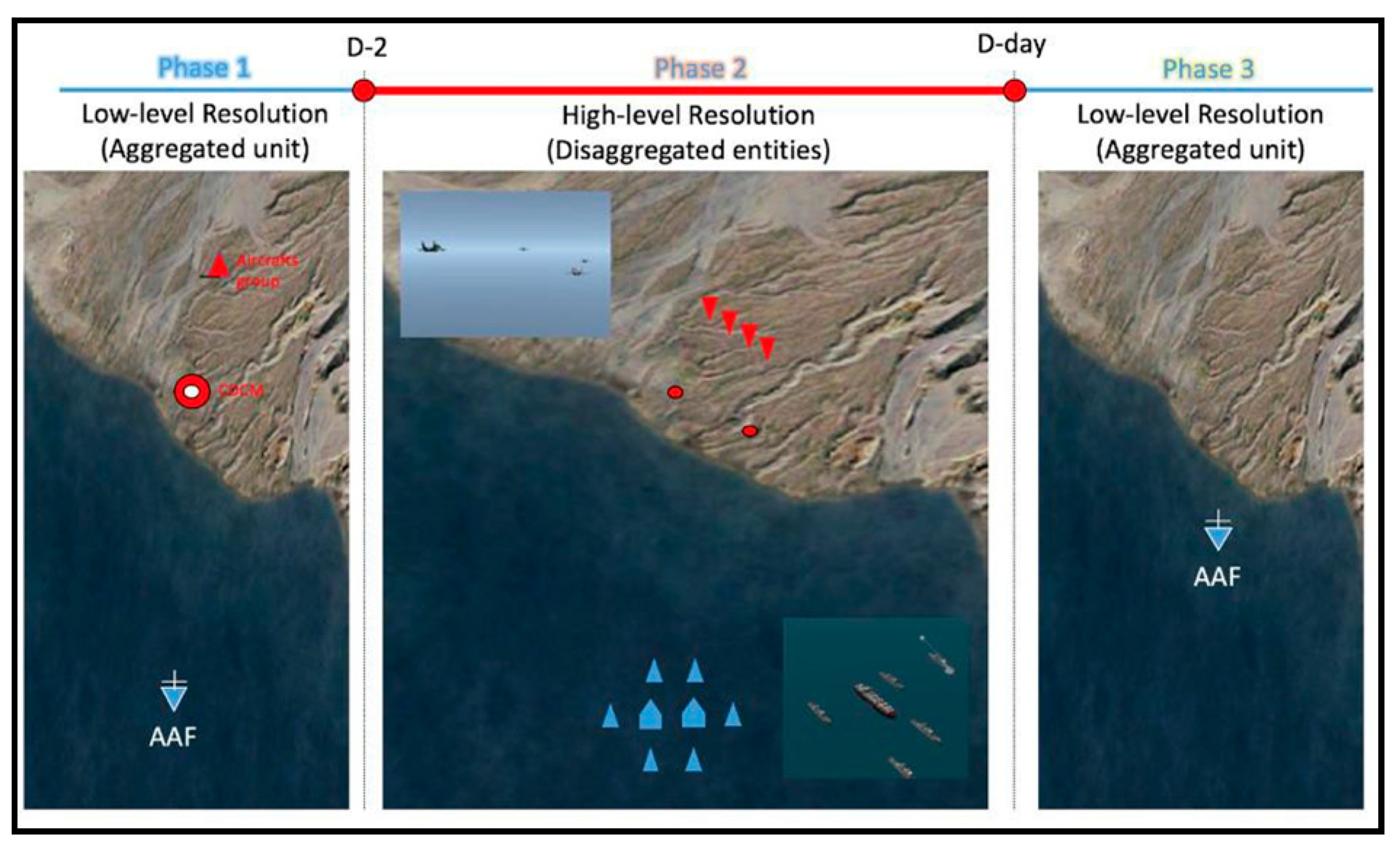
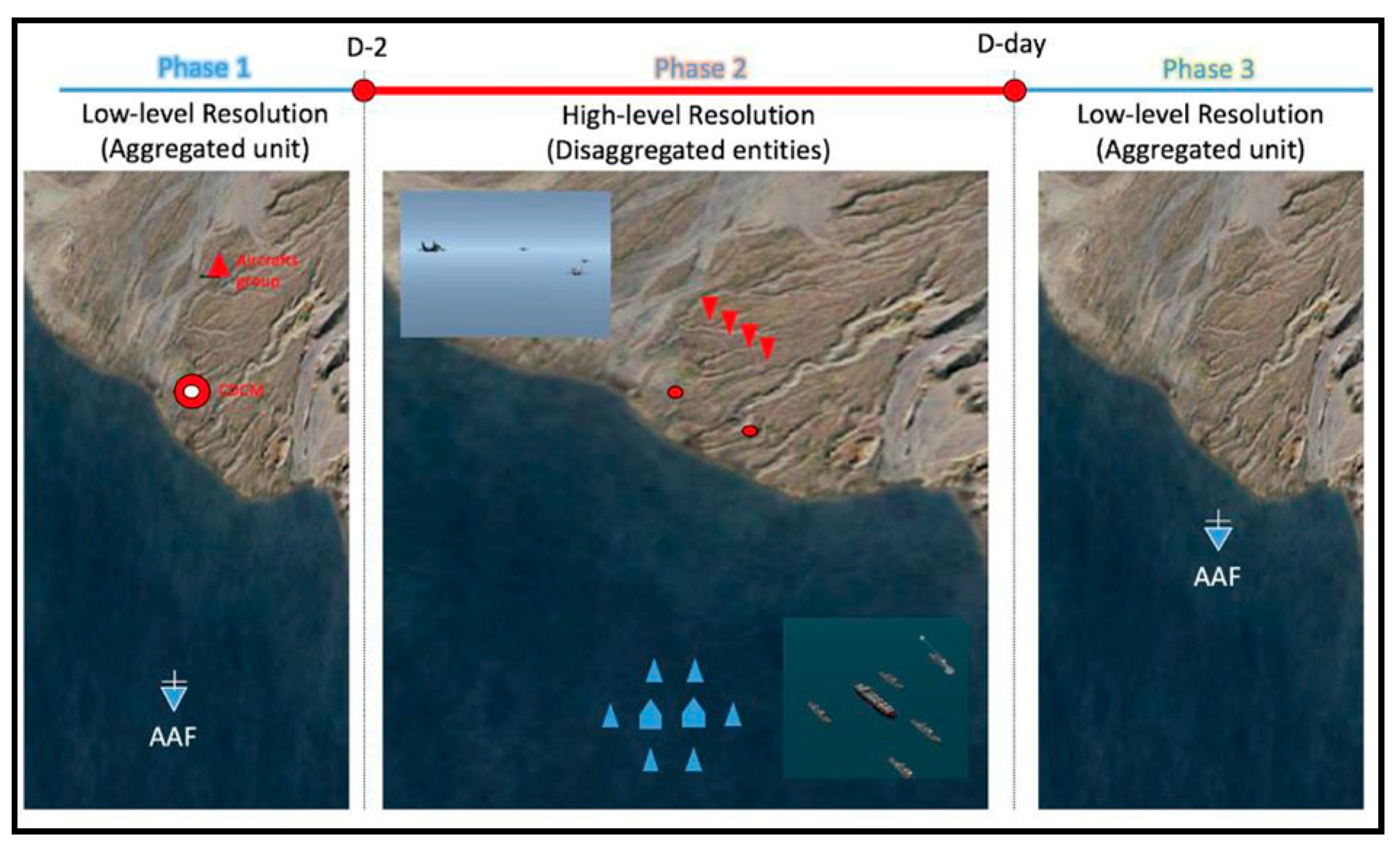
Multi-resolution combat models need the capacity to change a low-resolution level to a high-resolution level, or vice versa, respectively while simulating models. One of the various resolution change methods is aggregation–disaggregation. Aggregation objects mean a unit level consisting of various entity levels, while disaggregation objects represent an entity level which cannot be further decomposed [
19]. Disaggregation can be triggered by an event where aggregate units are separated into a lot of entities at a lower abstraction level, each representing a higher resolution component [
16]. Aggregation is also triggered in some situations where the federates need to control the aggregated unit, and then the entity is simulated independently.
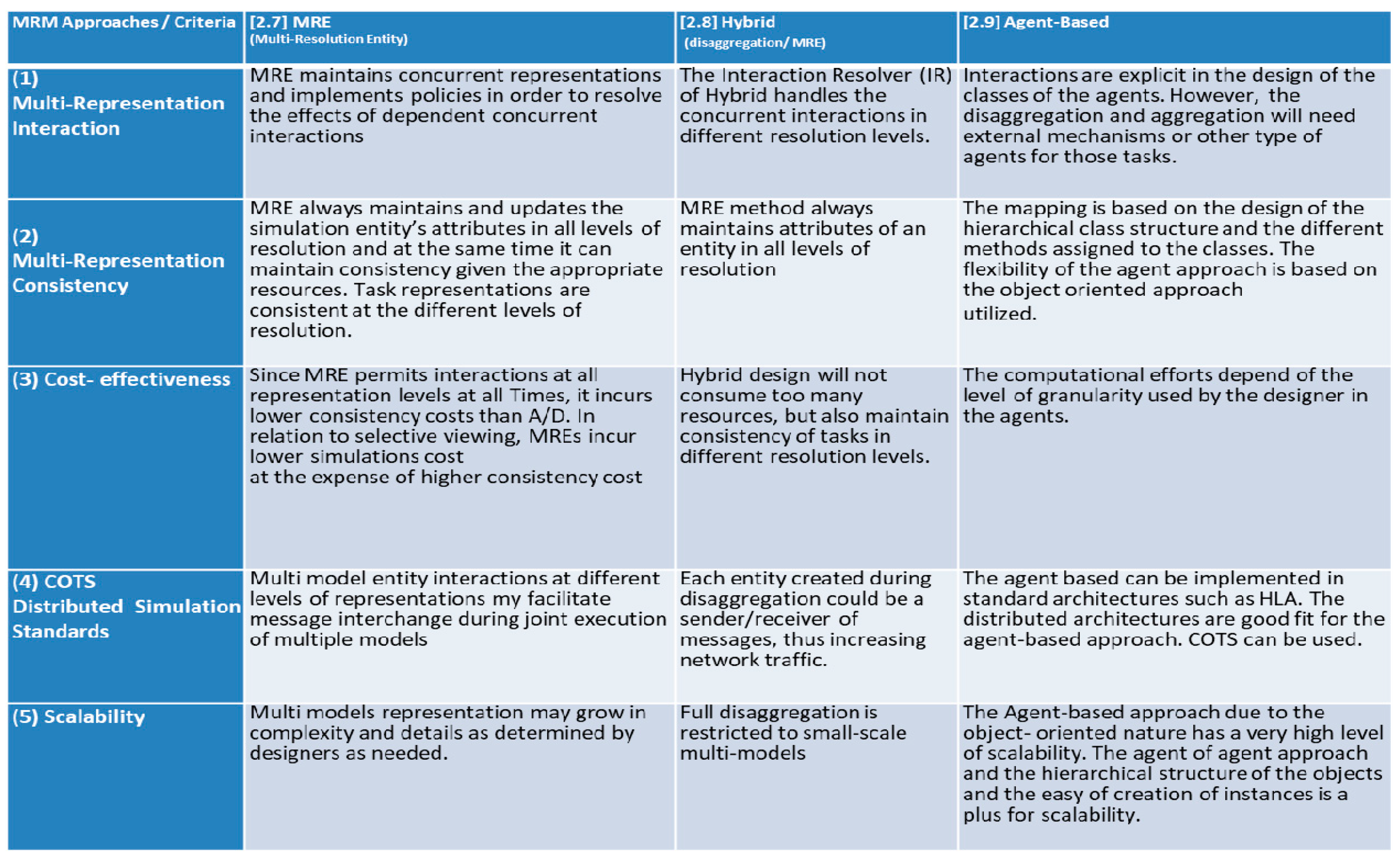
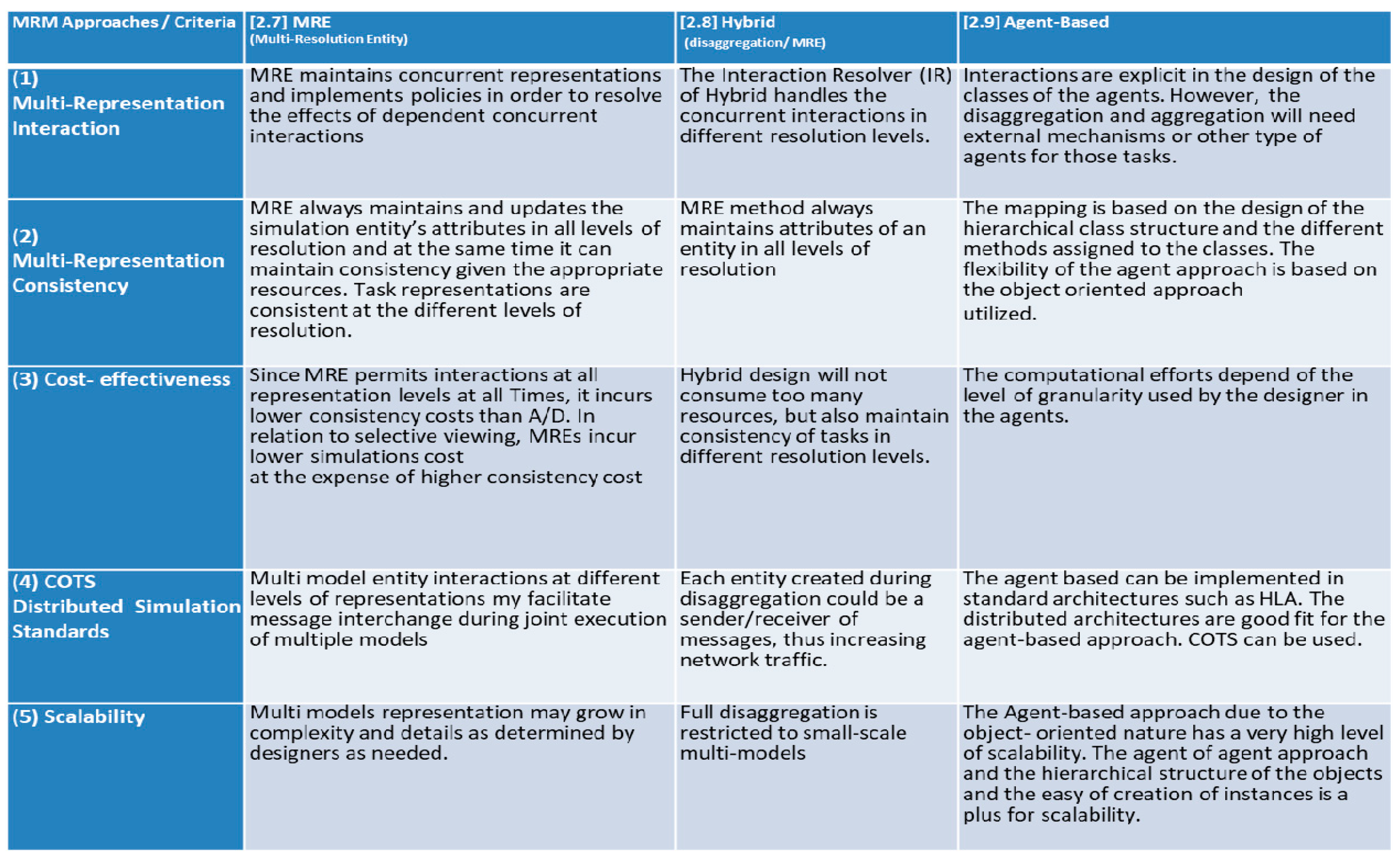
The third group, as shown in
Figure 6, is composed of three advanced and popular methods, the multi-resolution entity (MRE), the hybrid based on disaggregation and MRE, and the agent-based one [
20]).
The multi-resolution entity (MRE) concept for interacting at multiple levels of resolution simultaneously, referred to as MRM from here on. This concept is one of the methods to maintain consistency of constituents during a series of aggregations and disaggregation. It is how to keep records for entities or units while avoiding inconsistency in MRM. According to Reynolds Paul. F. [
15]: “an MRM interacts with consistent properties across matched properties at different levels of resolution. Each MRE maintains state information at all desired levels of resolution or provides the requested level of information immediately.”
The aggregation–disaggregation was the commonly used approach and was considered to represent the nature of MRM best. However, this approach may lead to inconsistencies between the various levels of resolution. On the other hand, the MRE approach always maintains the attributes of an entity consistently at all levels of resolution. However, MRE can be consistent while sacrificing more resources and software costs. The hybrid method is designed to reduce or eliminate transition overheads, in other words, chain disaggregation. In the perspective of interacting at multiple levels of resolution simultaneously, it is a similar concept with MRE, but they have diverse ways to maintain consistency. According to Reynolds Paul. F. [
15], a hybrid approach maintains a consistent attributes core across the resolution level. The core is a subset of the entire set of attributes, consisting solely of attributes that are considered essential. As needed, the values of additional attributes are generated from values at the core level.
Agent-based simulation has gained more popularity recently, especially in areas where behavior is important, because of its powerful capability of capturing behavior in detail and imitating the system interactions and dynamics [
21]. The increasing numbers of conference proceedings and journal articles that call for agent-based models are evidence of its popularity and growth [
20]. The agent-based simulation would provide better results under certain scenarios, because the legacy modeling tools may not be enough to capture the complexity of the real world. Although there is no universal agreement on the exact definition of the agent, the fundamental characteristic of an agent is the ability to make independent decisions that are working itself. The agents have a behavior and can make decisions. They also interact with the objects and other agents. Furthermore, agents can form groups and act individually. In this perspective, we can use an agent-oriented approach to more closely match the characteristics required by the military and operational view of problems.
6. Practical Steps to Build an MRM System
The current MRM approaches, which were presented in the previous section, are solutions that have a different focus on the MRM issues/problems. Some approaches are solutions for simulation design, which can be MRM, such as IHVR, and agent-based. However, there are some specific problem resolutions like MRE or hybrid. These approaches are methods that need to be reviewed at different steps during the development of an MRM. A meaningful MRM federation is to connect simulations (or federates) with different levels of resolution (high or low) to meet the needs of the user. Therefore, the following three steps are essential to build an MRM system and categorize the current MRM approaches into each step:
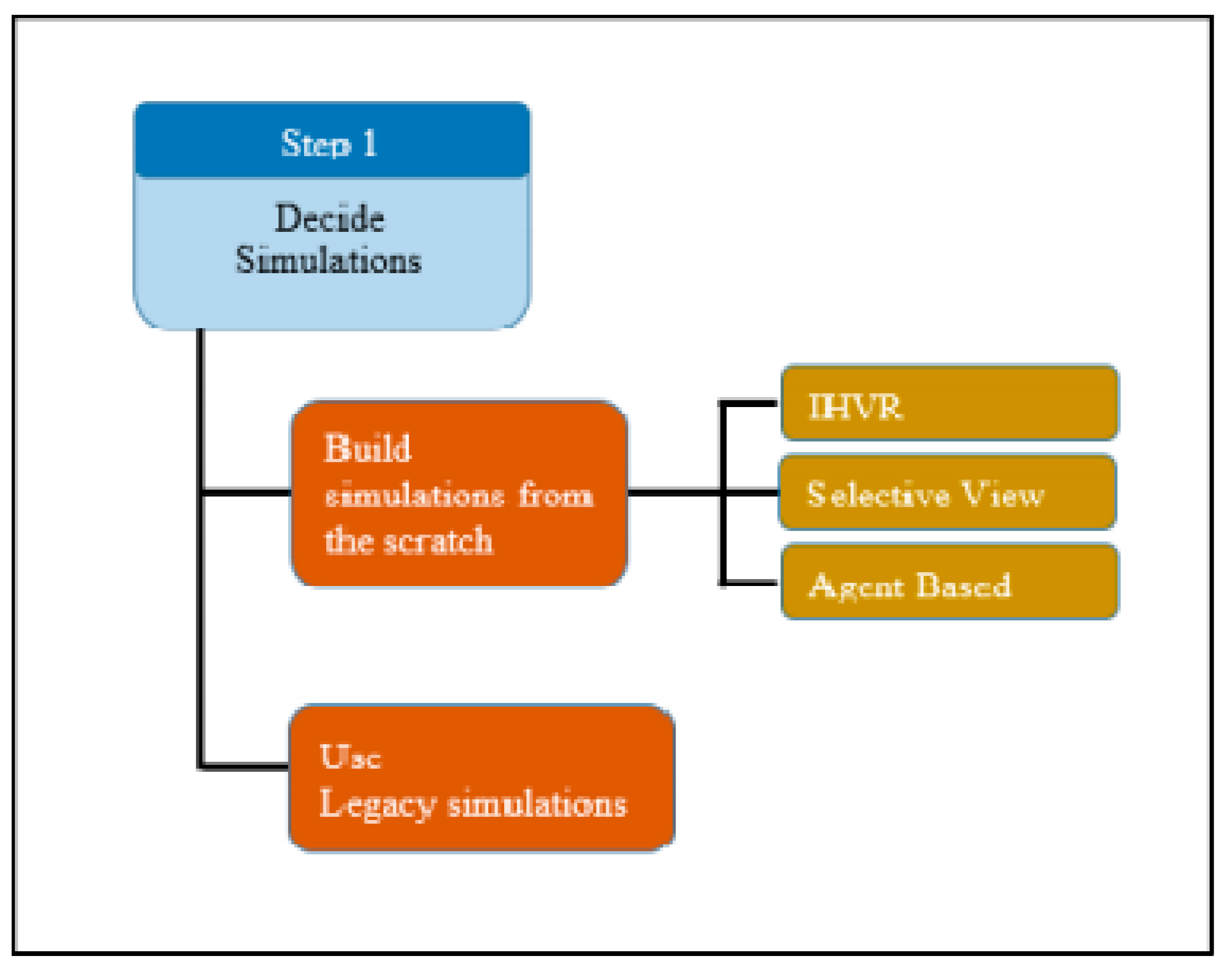
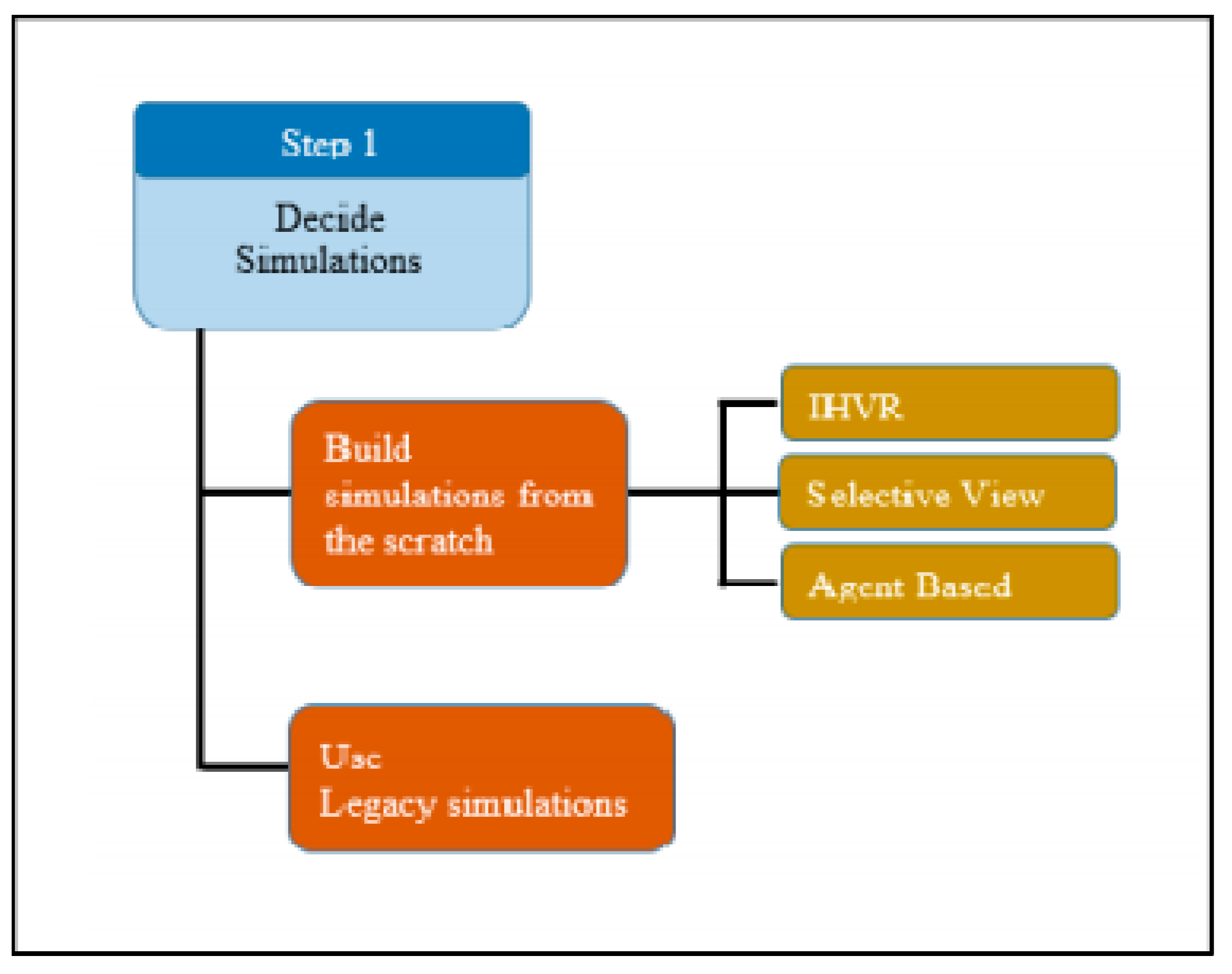
Step 1: Decide to Develop a New Simulation or Reuse
Most existing simulations have inherently limited interoperability because they were not designed to work together. If one wants to build a whole simulation to make it work in a federation, then it can be built seamlessly and is an ideal MRM federation in some aspects. As shown in
Figure 7, integrated hierarchical variable resolution (IHVR), selective viewing (SV), and agent-based approaches can be adapted if one wishes to build a new simulator or simulator for MRM.
Building an MRM system can create a seamless MRM federation. It can be designed to avoid data inconsistency or time synchronization issues between low and high-resolution models. On the other hand, it can be costly. If a user wants to build the MRM federation system by using legacy simulators, then the builder must consider which simulators will participate in the federation to meet the user’s requirements.
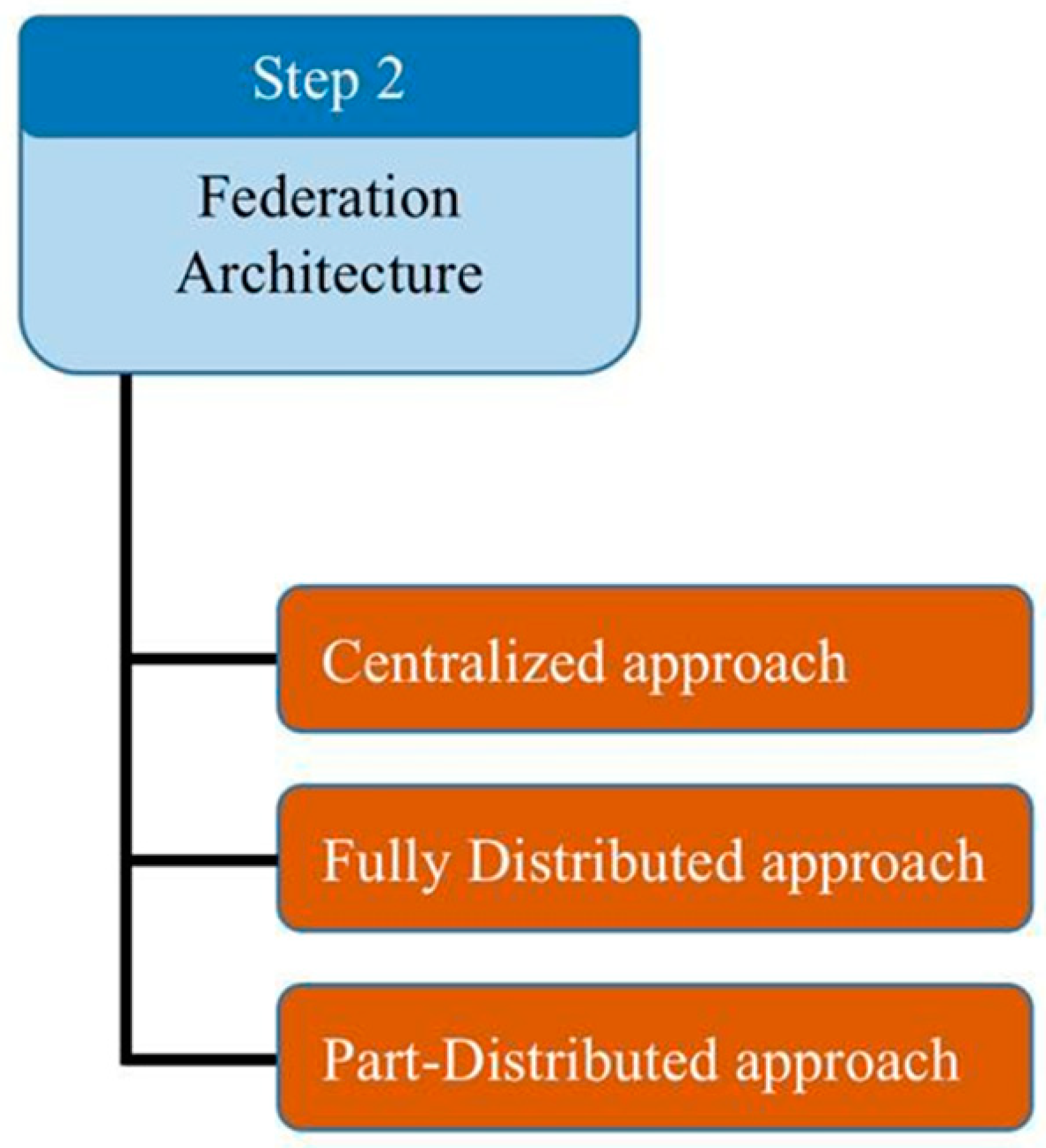
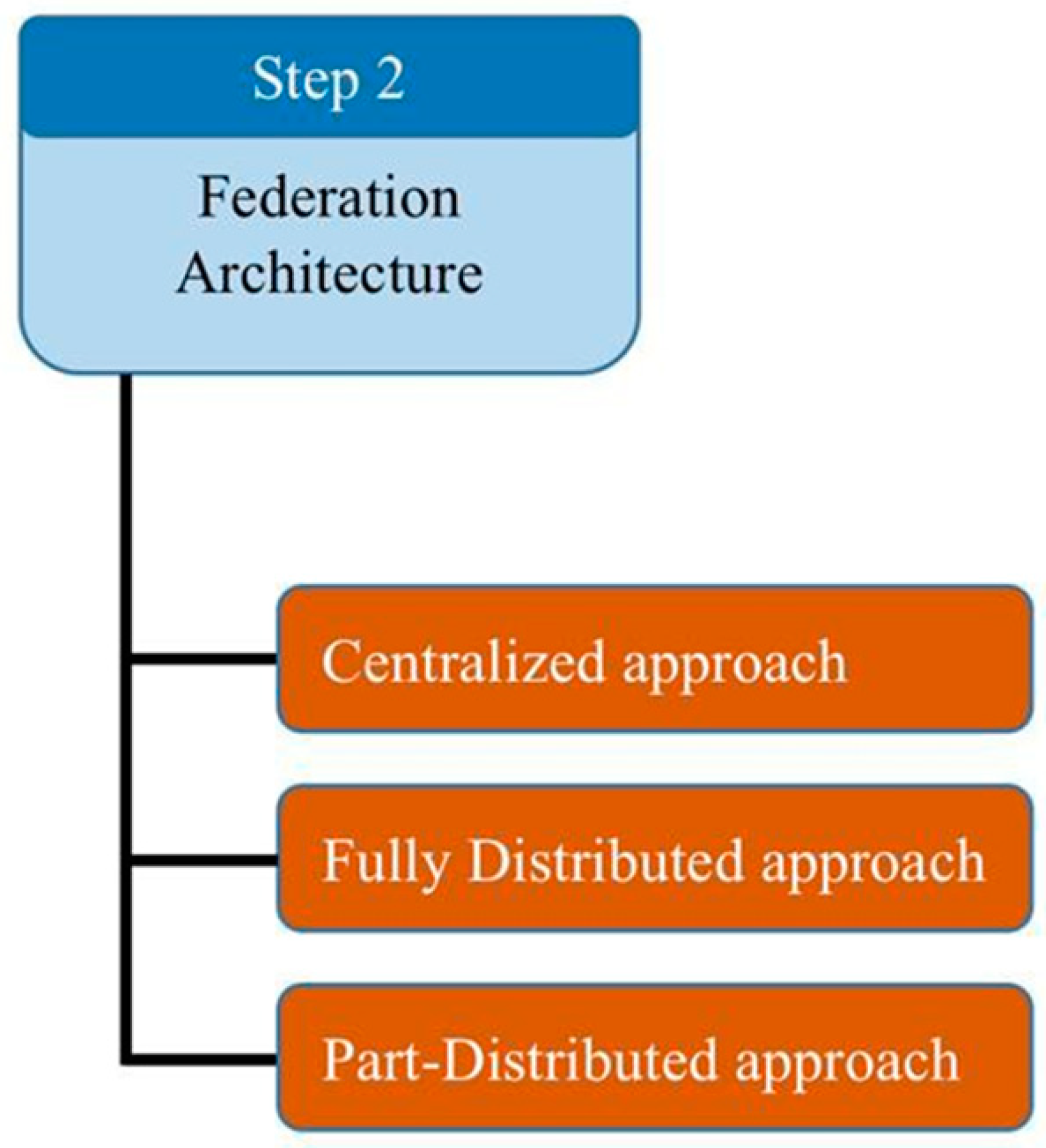
Step 2: Federation Architecture
If the builder decides to use legacy simulators for an MRM system, then they might face the problems that were discussed in
Section 4, the current issues of MRM Distributed Simulation Systems.
When the developer wants to build a federation among the different levels of simulations, they have to consider the federation architecture at first. According to Martin & Pierre [
22], there are three federation architecture approaches; centralized, fully-distributed, and part-distributed approaches (
Figure 8).
Martin A. & Pierre S. [
22] said that a single federate ensures the simulation of both low and high-resolution entities in the centralized approach. The method is to absorb several high-resolution simulations in a low-resolution simulation and make them work as part of a low- resolution simulator engine. This approach needs re-engineering of all simulations which participate in the federation.
Conversely, a fully distributed architecture, is designed for each aggregate or disaggregate entity to interact with its own federates. In this architecture, each federate may run on different hosts of the network.
The part-distributed architecture can provide a compromise between the number of messages exchanged and the distribution. The architecture is simple, each federate takes charge of a specific resolution.
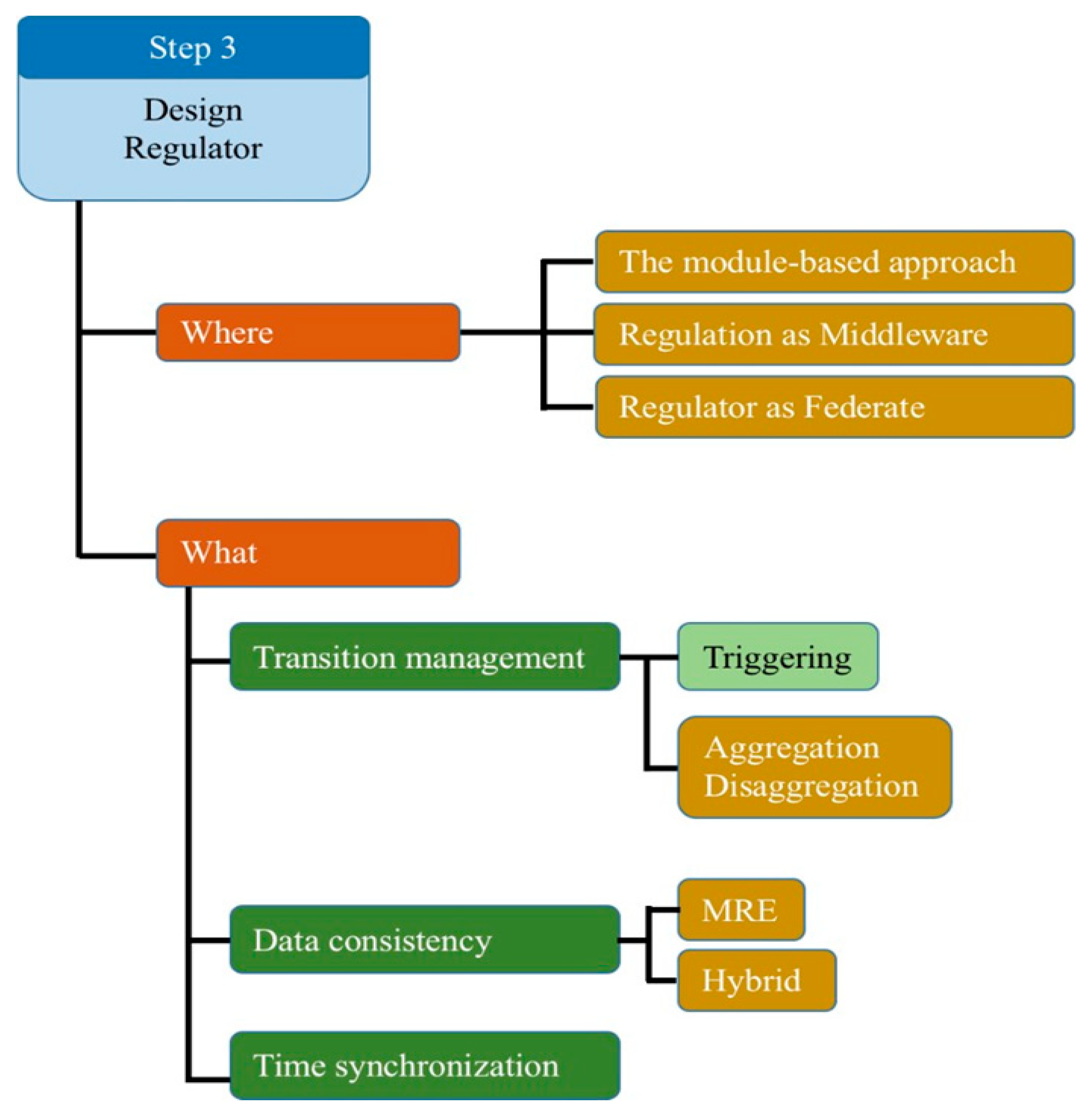
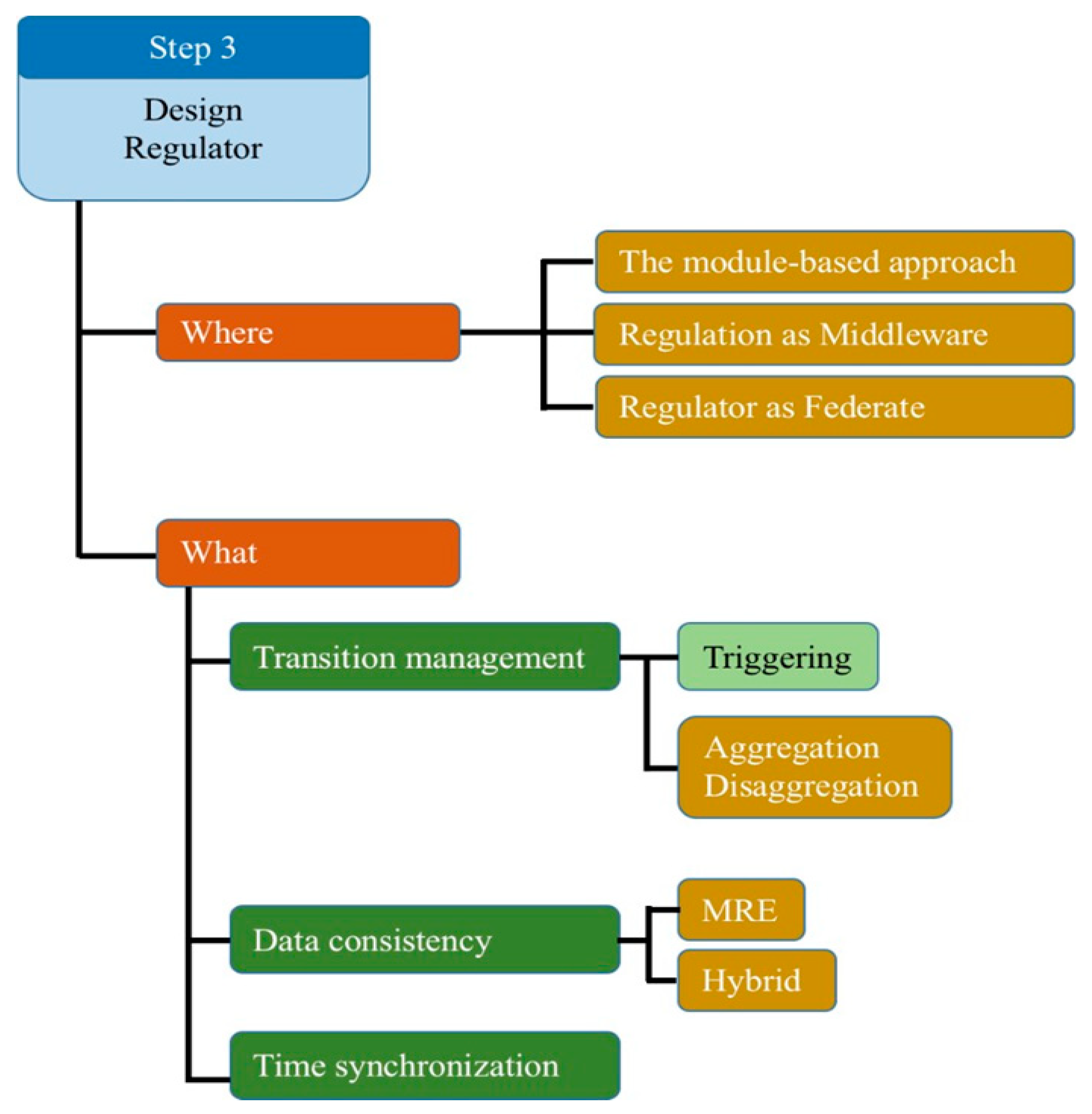
Step 3: Design Regulator
The regulator controls the ownership and changes the information for the sub-federates to fit each other. As shown in
Figure 9, the Regulator can vary based on the function of the regulator and where the builder placed it. In some papers, it is called a resolution converter. It works as an interpreter and coordinator in the federation.
Engineers can build without a regulator, but it will result in a less powerful MRM. An MRM without a regulator has major data inconsistency problems, or they cannot share any data among federates because each federate could have different attributes for running their simulation engines. Only a certain amount of information can be shared if the federates build the same standard simulation architecture (SSA) like an HLA.
The design of regulators is the core of building a seamless MRM federation system. The standard simulation architecture (SSA) provides a rough linkage among federates, but the higher resolution gap among federates causes more problems in the federation. Therefore, adequate modifications are needed. Re-engineering of simulations would be expensive, so the regulator can be an alternative method to relieve MRM problems. There are two major considerations:
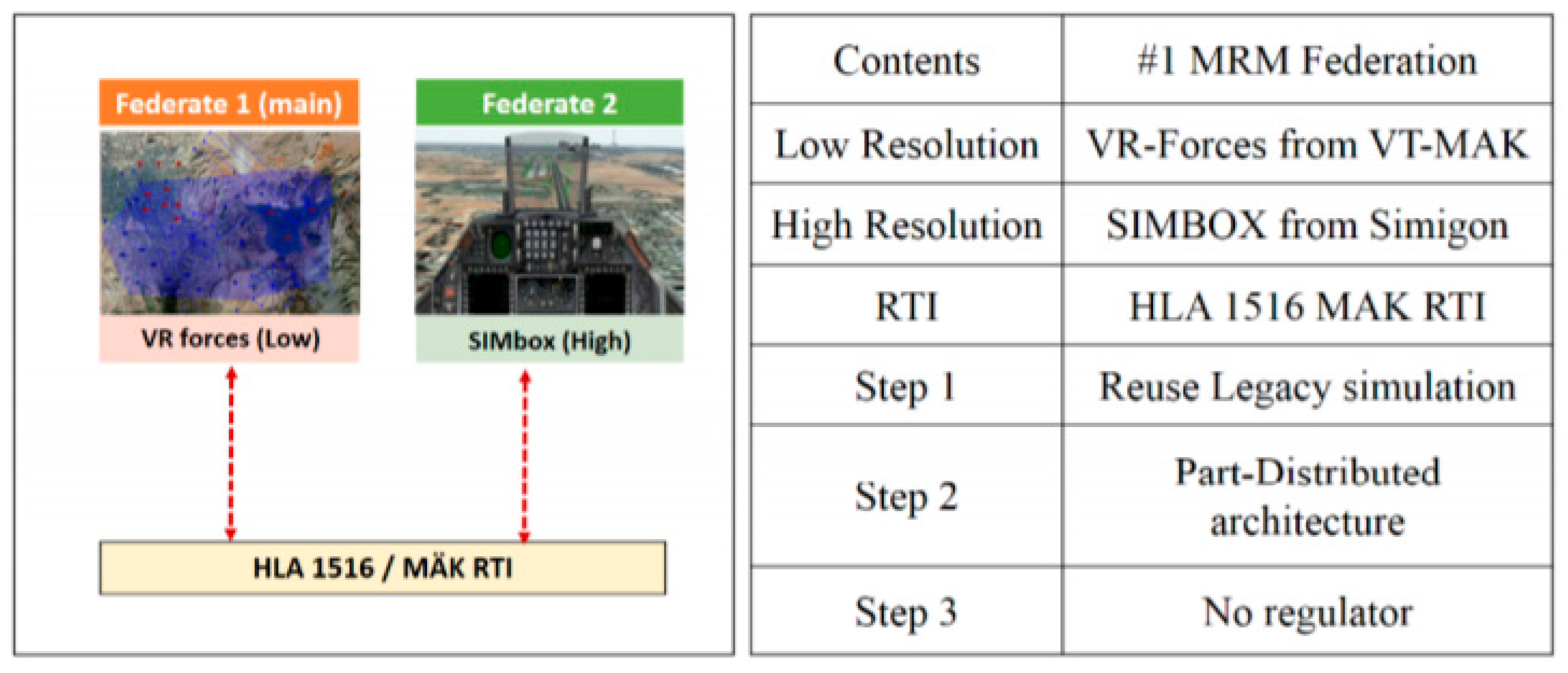
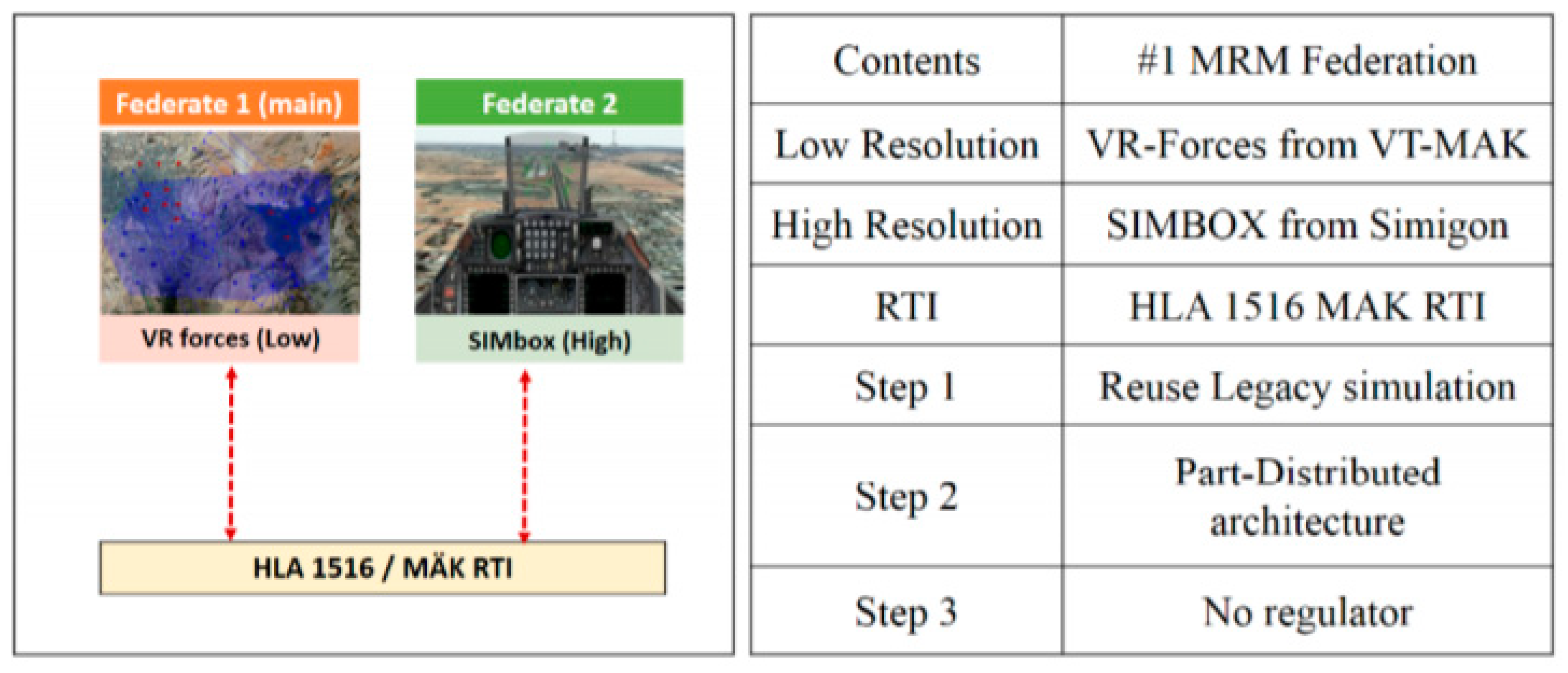
What to put in the regulator: transition management is a way to manage the level gap of information among federates. When MRM changes a low-resolution level to a high-resolution level, MRM will change one side’s information to make it suitable for the other side. For example, there is a tank squadron unit which consists of four individual tanks in a low-resolution model (MASA Sword). A high-resolution model (SIMBox Simigon) is a simulation which can only represent individual tanks; therefore, the low-resolution model information needs to be changed to be compatible information for the high-resolution model or vice versa.
Where to put the regulator: If the developer decided on what kind of MRM approaches they want to include in the regulator, the next thing to consider is where to put the regulator. There are three different options to attach the regulator in an MRM federation system:
The module-based approach
Regulation as middleware approach
Regulator as federate approach
Each approach has a different position for the attaching regulator, they each have has pros and cons; there is no way to determine which approach is better than the other because the best method depends on the user requirements and federated (simulator) characteristics.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}