Towards Personal Virtual Traffic Lights

 ,
,  ,
,  , ,
, ,  and
and
Abstract
:1. Introduction
2. Related Work
3. Traffic Light Systems
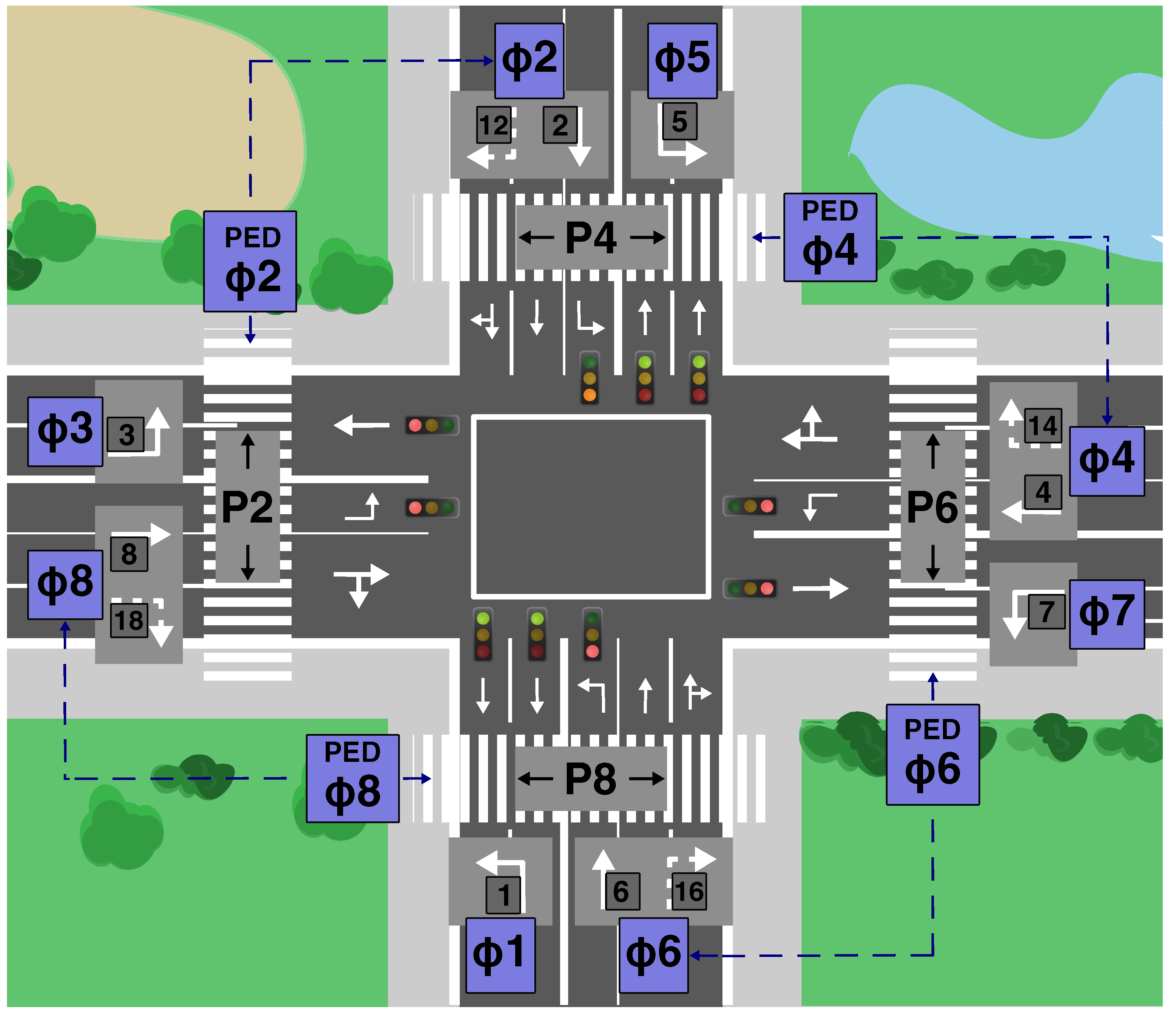
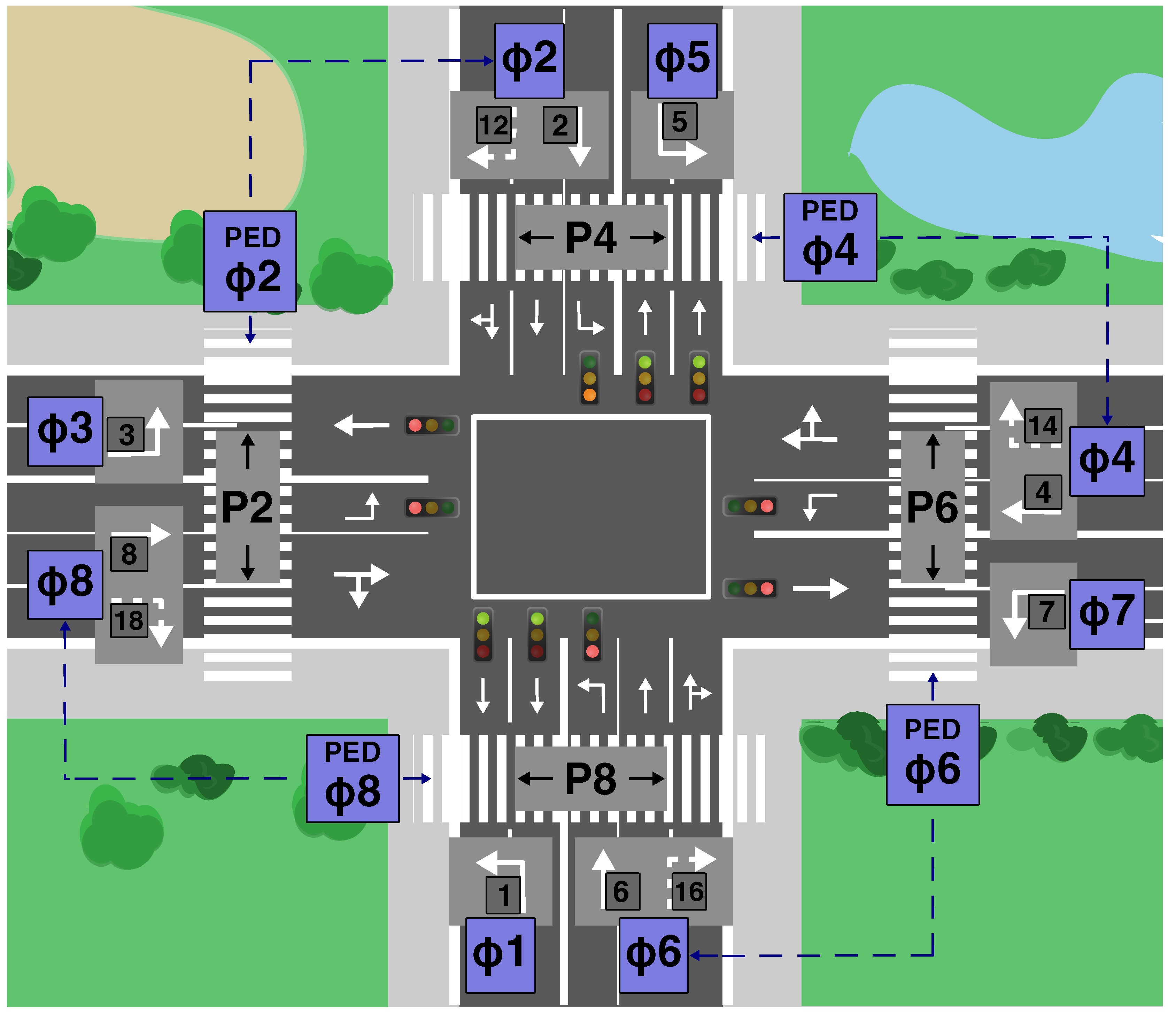
- Numbers, or in the case of pedestrians, a “P” followed by a number (Px), describe possible user movements at the intersection. These are represented in Figure 1 as gray squares;
- In a four-way intersection, vehicles can perform twelve one-way movements, while pedestrians can perform four two-way movements;
- A traffic signal phase, , represents a time period managed by a signal controller authorizing one or more movements at each intersection segment. Signal phases are depicted in Figure 1 as blue boxes;
- Even numbers are used to reference go-through and right-turn movements. Even numbers higher than 10 represent right-permitted movements. Numbers 2 and 6 are used for major street trough movements;
- Odd numbers represent left turns. The numbers 1 and 5 are used for major street left turns, whereas numbers 3 and 7 indicate minor street left-turn movements;
- Pedestrian movements occur concurrently with even-numbered vehicular phases, as depicted with dashed lines.
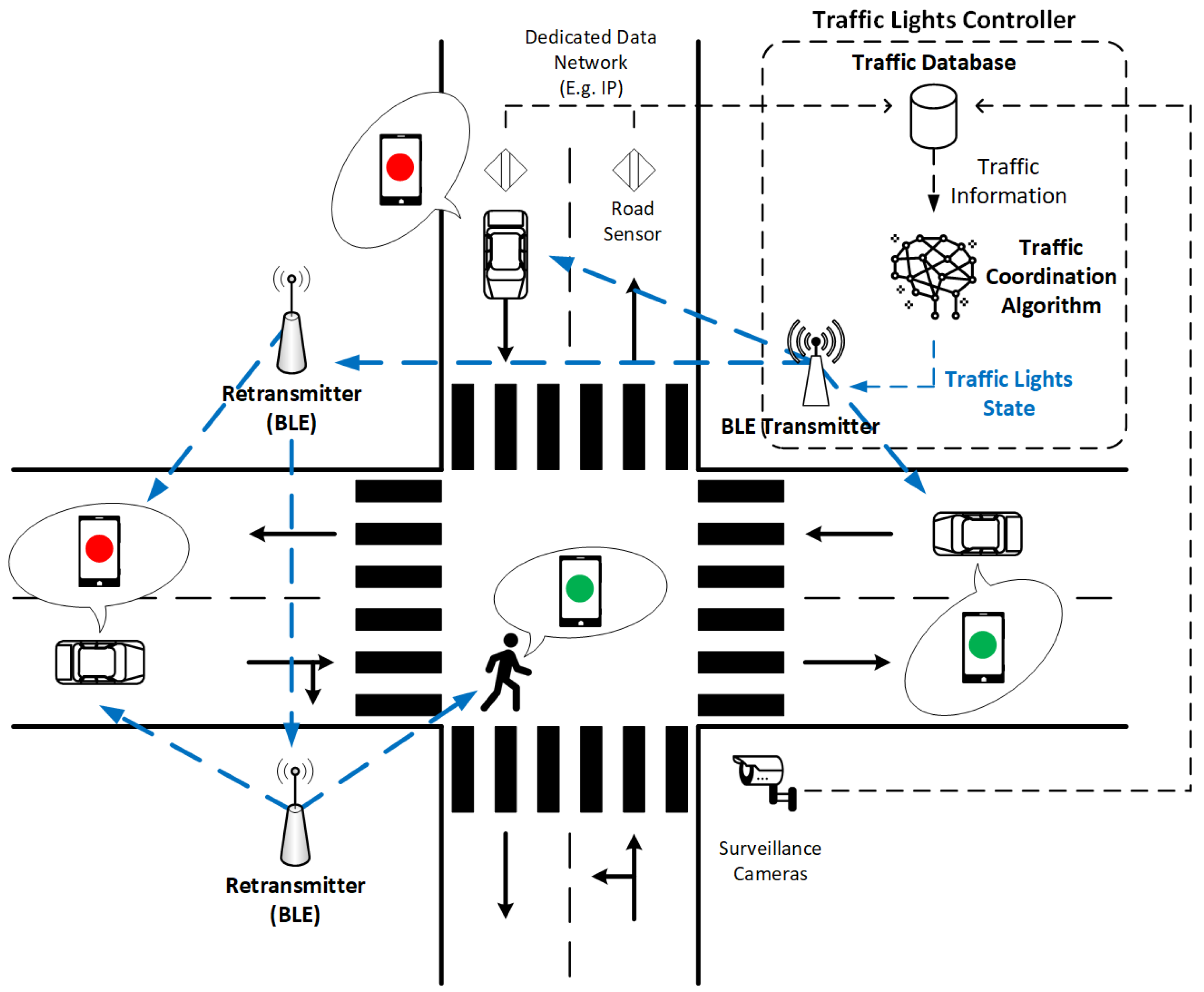
4. Proposed Architecture
4.1. Users
4.2. Environment Perception
4.3. Signaling
4.4. Traffic Control
4.5. Communication
5. Implementation
5.1. Controller
| Algorithm 1 Controller algorithm |
|
5.2. Retransmitter
| Algorithm 2 Retransmitter algorithm. |
|
5.3. User Interfaces
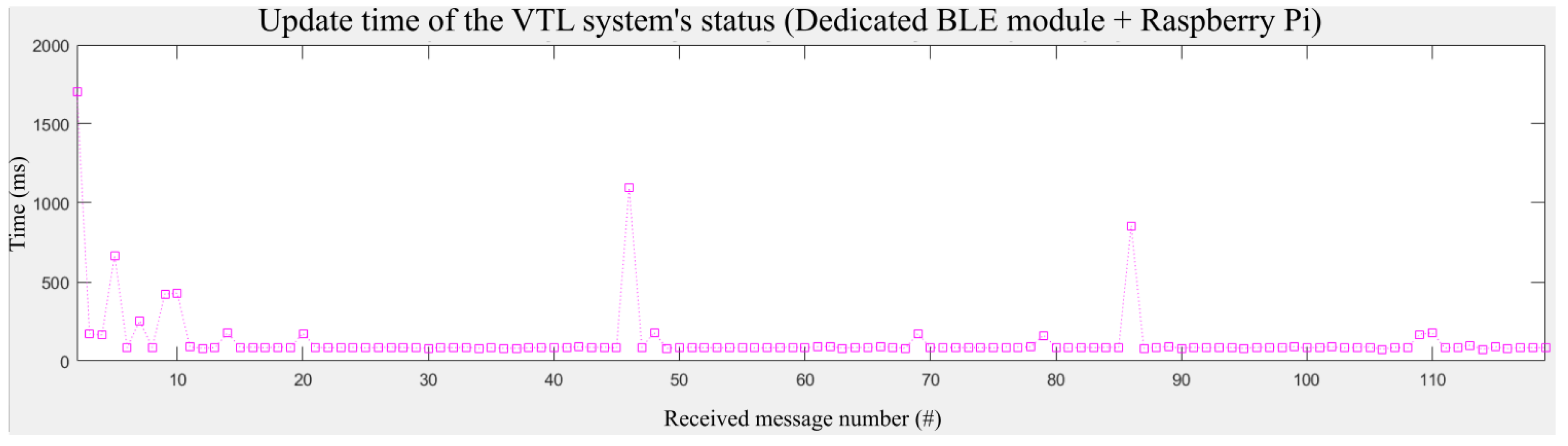
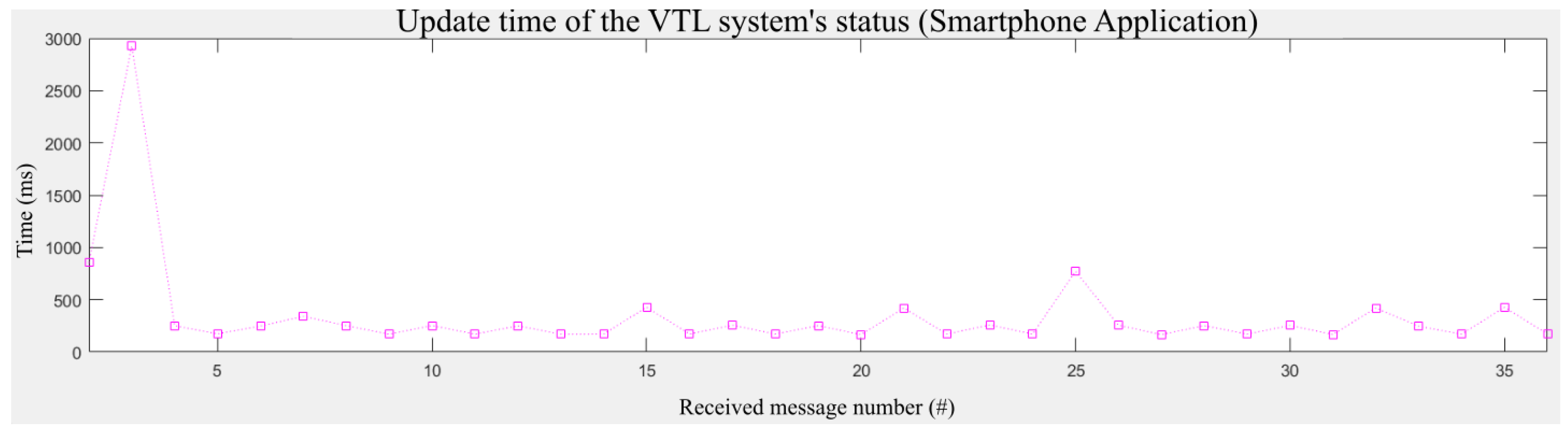
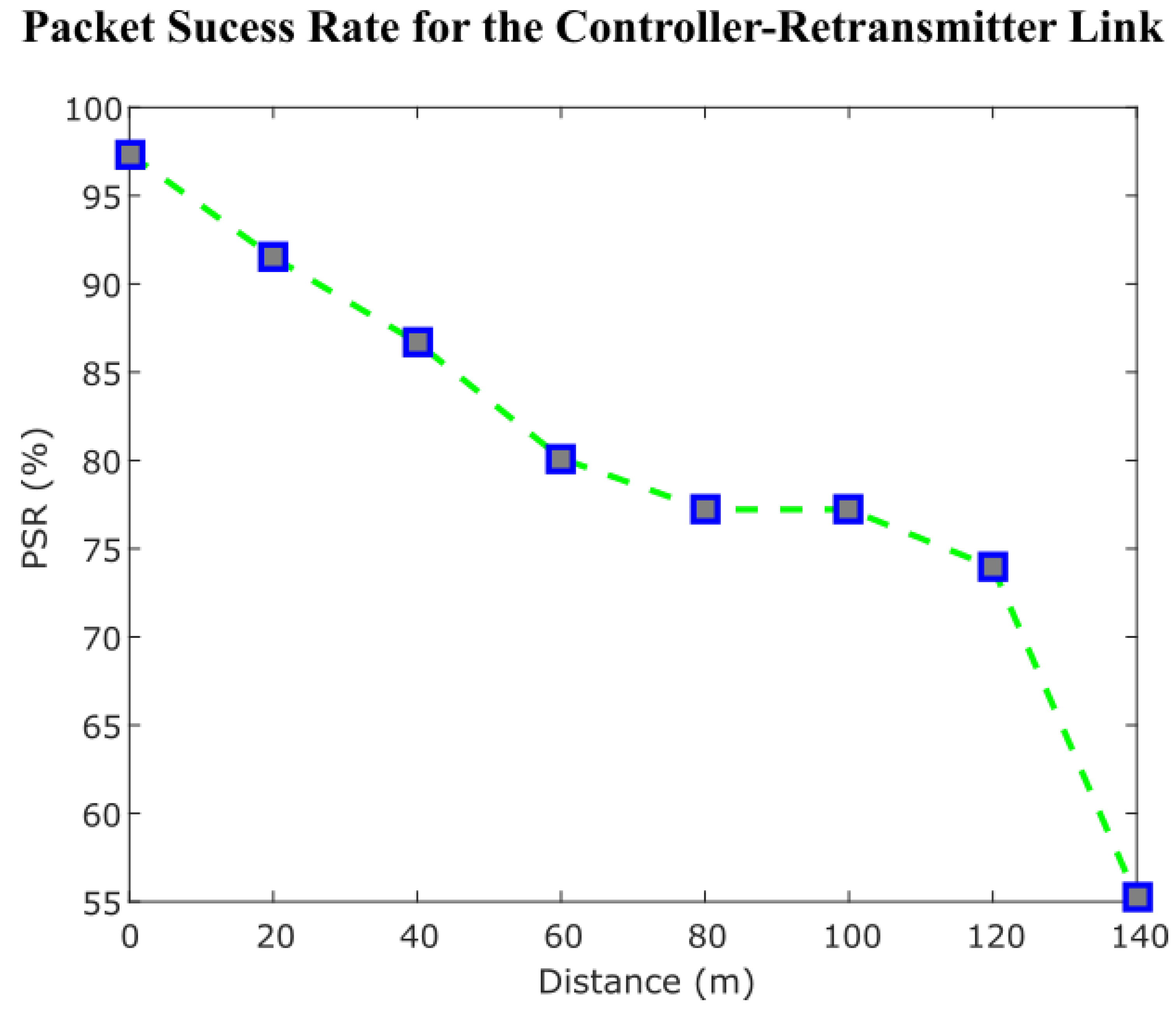
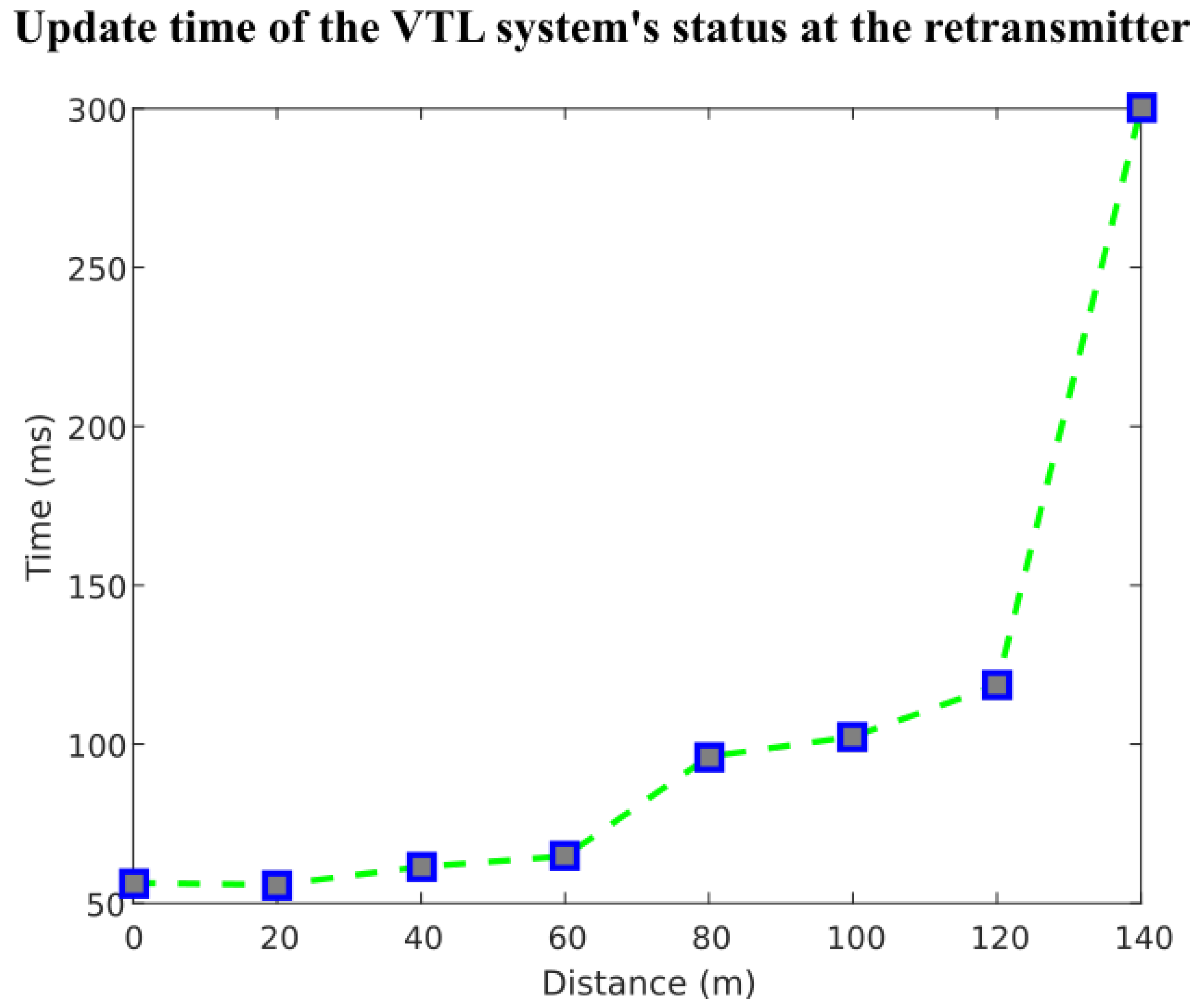
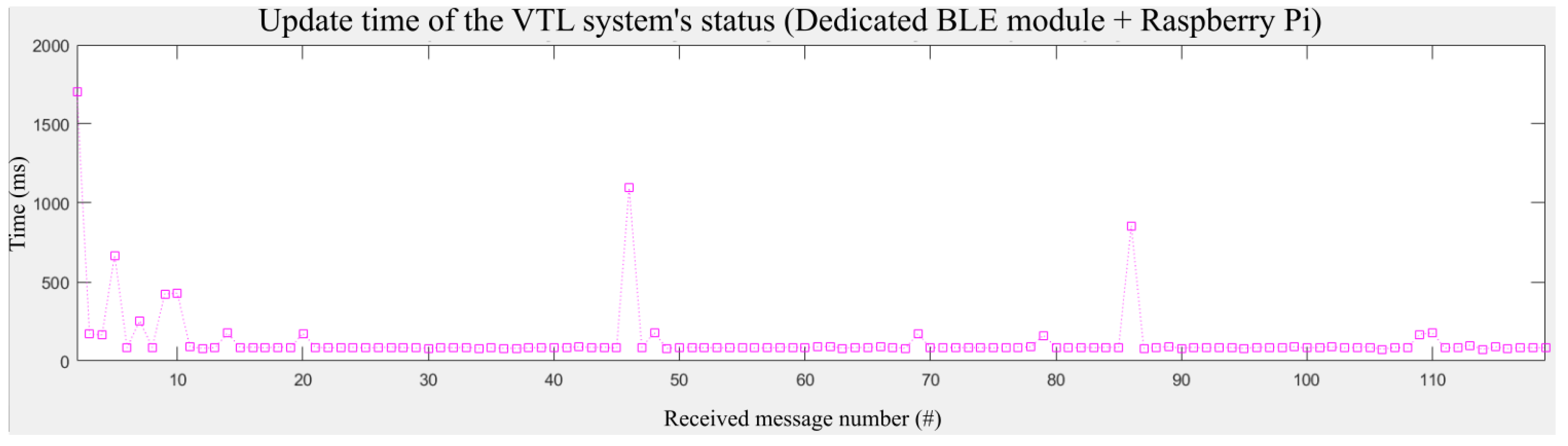
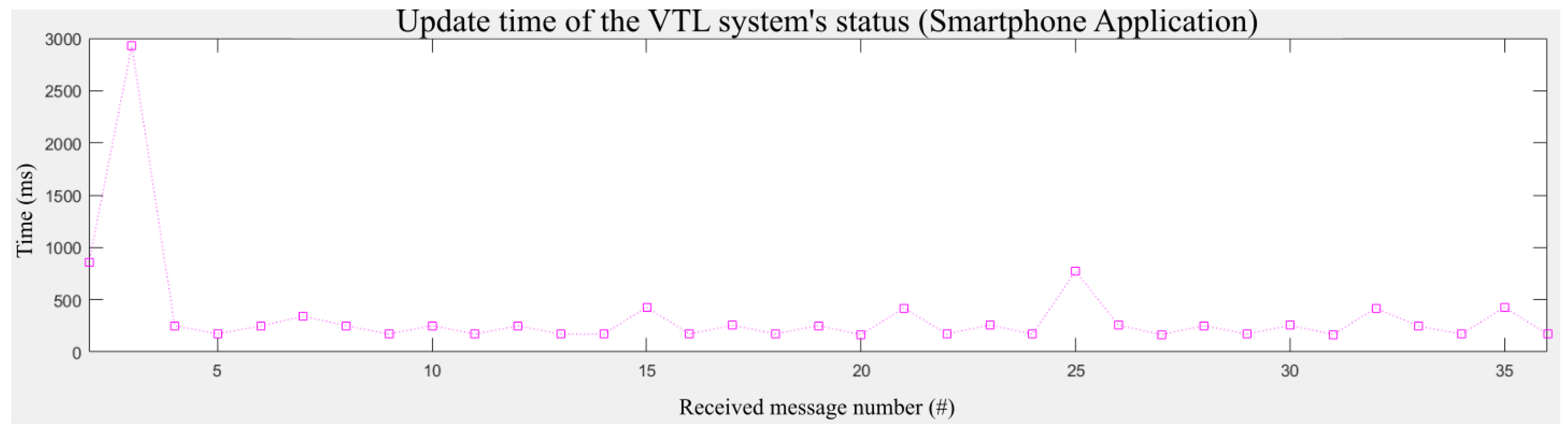
6. Experimental Evaluation
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| ASCII | American Standard Code for Information Interchange |
| BLE | Bluetooth Low Energy |
| CRC | Cyclic Redundancy Check |
| DSRC | Dedicated Short-Range Communication |
| ITS | Intelligent Transportation Systems |
| I2V | Infrastructure to Vehicle |
| MAC | Medium Acess Control |
| MIC | Message Integrity Check |
| NS3 | Network Simulator 3 |
| OBU | Onboard Unit |
| RSU | RoadSide Unit |
| UART | Universal Asynchronous Receiver-Transmitter |
| WHO | World Health Organization |
| PSR | Packet Success Rate |
| RSSI | Received Signal Strength Indication |
| TCS | Traffic Control System |
| VTL | Virtual Traffic Light |
| V2V | Vehicle to Vehicle |
References
- Sousanis, J. World Vehicle Population Tops 1 Billion Units. Available online: https://www.wardsauto.com/news-analysis/world-vehicle-population-tops-1-billion-units (accessed on 3 January 2019).
- Statista. Number of Cars Sold Worldwide from 1990 to 2017 (in Million Units). Available online: https://www.wardsauto.com/news-analysis/world-vehicle-population-tops-1-billion-units (accessed on 19 January 2018).
- Organization, W.H. Projections of Mortality and Causes of Death, 2015 and 2030. Available online: http://www.who.int/healthinfo/global_burden_disease/projections/en/ (accessed on 19 January 2018).
- European Commission. Road Safety in the European Union: Trends, Statistics and Main Challenges. Available online: https://ec.europa.eu/transport/road_safety/sites/roadsafety/files/vademecum_2016.pdf (accessed on 3 September 2018).
- James Chang. Market Penetration Analysis for VSC—A Safety Benefit Opportunities Estimation; Discussion Document, Prepared for ITS Joint Program Office, RITA, and the NHTSA. Available online: https://docplayer.net/31413147-Market-penetration-analysis-for-vsc-a-safety-benefit-opportunities-estimation-discussion-document-james-chang-noblis.html (accessed on 8 June 2010).
- Ferreira, M.; Fernandes, R.; Conceição, H.; Viriyasitavat, W.; Tonguz, O.K. Self-organized Traffic Control. In Proceedings of the Seventh ACM International Workshop on VehiculAr InterNETworking (VANET ’10), Chicago, IL, USA, 24 September 2010; ACM: New York, NY, USA, 2010; pp. 85–90. [Google Scholar] [CrossRef]
- Conceicao, H.; Ferreira, M.; Steenkiste, P. Virtual traffic lights in partial deployment scenarios. In Proceedings of the 2013 IEEE Intelligent Vehicles Symposium (IV), Old Coast, QLD, Australia, 23–26 June 2013. [Google Scholar] [CrossRef]
- Nakamurakare, M.; Viriyasitavat, W.; Tonguz, O.K. A prototype of Virtual Traffic Lights on Android-based smartphones. In Proceedings of the 2013 IEEE International Conference on Sensing, Communications and Networking (SECON), New Orleans, LA, USA, 24–27 June 2013. [Google Scholar] [CrossRef]
- Bazzi, A.; Zanella, A.; Masini, B.M.; Pasolini, G. A distributed algorithm for virtual traffic lights with IEEE 802.11p. In Proceedings of the 2014 European Conference on Networks and Communications (EuCNC), Bologna, Italy, 23–26 June 2014. [Google Scholar] [CrossRef]
- Iglesias, I.; Isasi, L.; Larburu, M.; Martinez, V.; Molinete, B. I2V Communication Driving Assistance System: On-Board Traffic Light Assistant. In Proceedings of the 2008 IEEE 68th Vehicular Technology Conference, Calgary, BC, Canada, 21–24 September 2008. [Google Scholar] [CrossRef]
- Gheorghiu, R.A.; Minea, M. Energy-efficient solution for vehicle prioritisation employing ZigBee V2I communications. In Proceedings of the 2016 IEEE International Conference on Applied and Theoretical Electricity (ICATE), Craiova, Romania, 6–8 October 2016. [Google Scholar] [CrossRef]
- Kodire, V.; Bhaskaran, S.; Vishwas, H.N. GPS and ZigBee based traffic signal preemption. In Proceedings of the 2016 IEEE International Conference on Inventive Computation Technologies (ICICT), Coimbatore, India, 26–27 August 2016. [Google Scholar] [CrossRef]
- Bluetooth SIG, Inc. Bluetooth Specification Version 4.0. Available online: https://www.bluetooth.org/docman/handlers/downloaddoc.ashx?doc_id=229737 (accessed on 19 January 2018).
- Urbanik, T.; Tanaka, A.; Lozner, B.; Lindstrom, E.; Lee, K.; Quayle, S.; Beaird, S.; Tsoi, S.; Ryus, P.; Gettman, D.; et al. Signal Timing Manual; Transportation Research Board: Washington, DC, USA, 2015. [Google Scholar]
- Governors Highway Safety Association. Pedestrian Traffic Fatalities by State: 2016 Preliminary Data. Available online: https://www.ghsa.org/sites/default/files/2017-03/2017ped_FINAL_4.pdf (accessed on 19 January 2018).
- Raspberry Pi Foundation. Raspberry Pi Model B (Homepage). Available online: https://www.raspberrypi.org/products/raspberry-pi-3-model-b/ (accessed on 3 January 2019).
- Henderson, G. Wiring Pi GPIO Interface Library for the Raspberry Pi. Available online: http://wiringpi.com/ (accessed on 3 January 2019).
- RN4020 Bluetooth Low Energy Module Data Sheet. Available online: http://ww1.microchip.com/downloads/en/DeviceDoc/50002279B.pdf (accessed on 30 September 2018).
- Peterson, W.W.; Brown, D.T. Cyclic Codes for Error Detection. Proc. IRE 1961, 49, 228–235. [Google Scholar] [CrossRef]
- Chang, K. Bluetooth: A viable solution for IoT? [Industry Perspectives]. IEEE Wirel. Commun. 2014, 21, 6–7. [Google Scholar] [CrossRef]
- Ferreira, J.; Fonseca, J.; Gomes, D.; Barraca, J.; Fernandes, B.; Rufino, J.; Almeida, J.; Aguiar, R. PASMO: An open living lab for cooperative ITS and smart regions. In Proceedings of the 2017 International IEEE Smart Cities Conference (ISC2), Wuxi, China, 14–17 September 2017; pp. 1–6. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| State | Pedestrians | Vehicles | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| P2 | P4 | P6 | P8 | |||||||||||||
| 5 | 2 | 12 | 1 | 6 | 16 | 7 | 4 | 14 | 3 | 8 | 18 | |||||
| ↳ | ↓ | ↵ | ↰ | ↑ | ↱ |  | ← |  |  | → | ↴ | |||||
| 1 | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● |
| 2 | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● |
| 3 | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● |
| 4 | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● |
| 5 | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● |
| 6 | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● |
| 7 | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● |
| 8 | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● |
| 9 | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● |
| 10 | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● |
| 11 | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● |
| 12 | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● |
| 13 | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Martins, V.; Rufino, J.; Silva, L.; Almeida, J.; Miguel Fernandes Silva, B.; Ferreira, J.; Fonseca, J. Towards Personal Virtual Traffic Lights. Information 2019, 10, 32. https://doi.org/10.3390/info10010032
Martins V, Rufino J, Silva L, Almeida J, Miguel Fernandes Silva B, Ferreira J, Fonseca J. Towards Personal Virtual Traffic Lights. Information. 2019; 10(1):32. https://doi.org/10.3390/info10010032
Chicago/Turabian StyleMartins, Vanessa, João Rufino, Luis Silva, João Almeida, Bruno Miguel Fernandes Silva, Joaquim Ferreira, and José Fonseca. 2019. "Towards Personal Virtual Traffic Lights" Information 10, no. 1: 32. https://doi.org/10.3390/info10010032
APA StyleMartins, V., Rufino, J., Silva, L., Almeida, J., Miguel Fernandes Silva, B., Ferreira, J., & Fonseca, J. (2019). Towards Personal Virtual Traffic Lights. Information, 10(1), 32. https://doi.org/10.3390/info10010032