
Predicted Mapping of Seabed Sediments Based on MBES Backscatter and Bathymetric Data: A Case Study in Joseph Bonaparte Gulf, Australia, Using Random Forest Decision Tree



Abstract
:1. Introduction
2. Study Area and Data
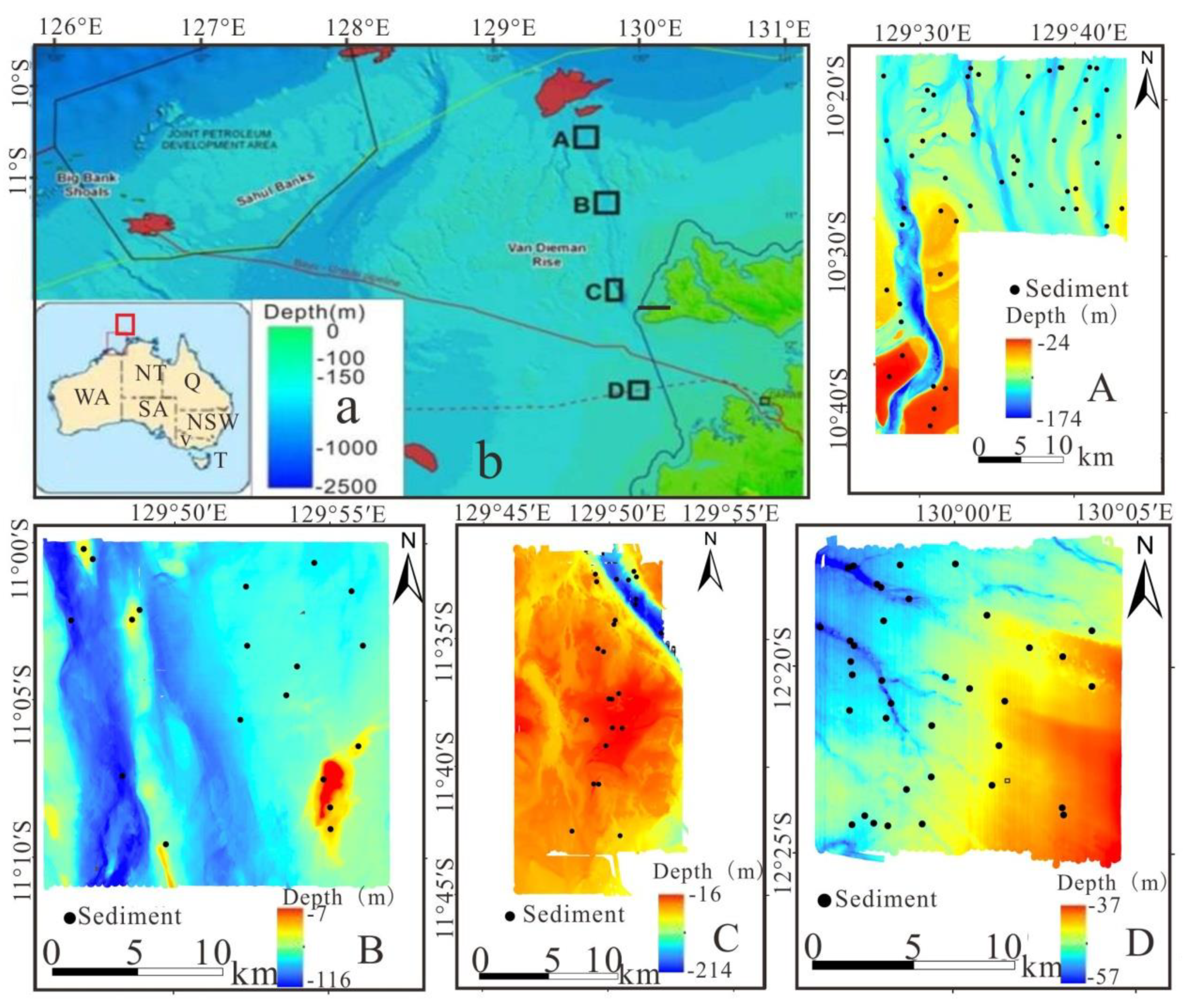
2.1. Study Area
2.2. Sediment Samples and Property
2.3. Multibeam Data and Its Processing
2.3.1. Backscatter Data
2.3.2. Bathymetric Data and Derivatives
3. Sediment Mapping Methods
3.1. Predictive Model—Random Forest Decision Tree
3.1.1. Target and Explanatory Variables
3.1.2. Selection of the Best Combination of Modeling Parameters
- Number of trees in the forest: 200;
- Maximum tree levels: 10;
- Minimum size node to split: 3;
- Random predictor control: square root of total predictors and overall accuracy.
- Number of trees in the forest: 1000;
- Maximum tree levels: 10;
- Minimum size node to split: 4;
- Random predictor control: overall accuracy.
3.1.3. Selection of the Best Combination of Explanatory Variables
3.1.4. Generation of the Predictive Relationships between the Important Explanatory Variables and Target Variables
3.2. Methods for Estimating Prediction Accuracy of Seabed Sediment
3.3. Two Experiments
4. Results
4.1. Prediction of Sediment Grain Size Properties
4.1.1. Modeling Results of Predicting Sediment Grain Size Properties
- The combination of explanatory variables for predicting %gravel was BIA of 15, 18, and 34° with the highest adjusted R2 of 0.68;
- The combination of explanatory variables for predicting %mud was BIA of 13 and 21°with the highest adjusted R2 of 0.46;
- The combination of explanatory variables for predicting MGS was BIA of 14, 48, 25, 33, and 22°, which achieved the highest adjusted R2 with 0.86 (Table 3).
- The combination of explanatory variables for predicting %gravel were BM and BIA of 15 and 34° with the highest adjusted R2 of 0.77;
- The combination of explanatory variables for predicting %mud were BM and BIA of 13 and 21°with the highest adjusted R2 of 0.57;
- The combination of explanatory variables for predicting MGS were BM and BIA of 14 and 24°, which achieved the highest adjusted R2 with 0.85 (Table 4).
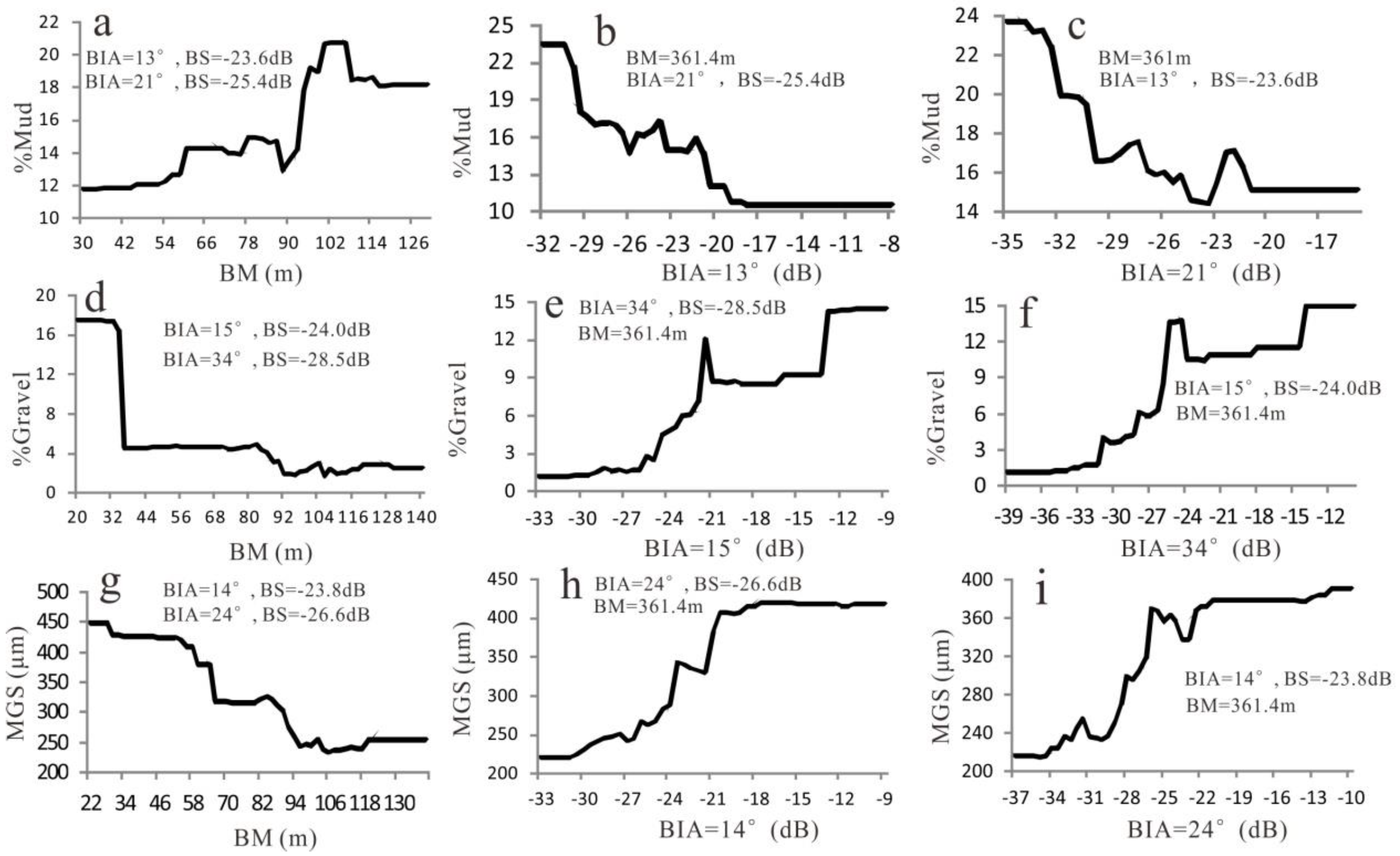
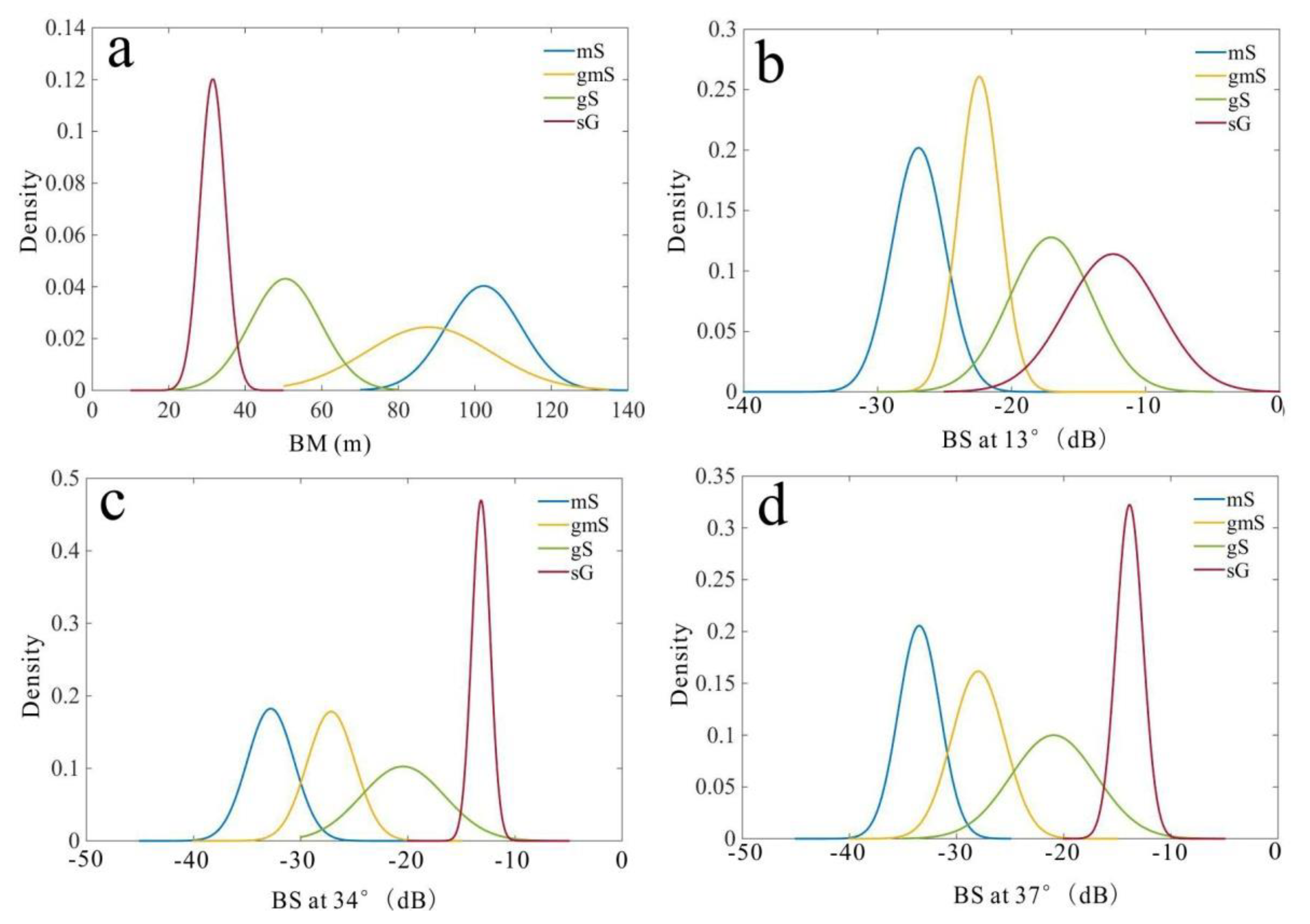
4.1.2. The Predicted Relationships between Multibeam Data and Sediment Properties
- The overall relationships between %gravel and the BIA of 15 and 34° were positive (Figure 3e,f). When the BS increases to ~−22 dB, the %gravel increases from 1% to 12%; increasing the BS further to −15 dB, however, decreases the %gravel to ~9%; further increasing the BS to −12 dB increases the %gravel again to ~15%. There is an abrupt relationship between the %gravel and BM. When the BM is shallower than ~32 m, the corresponding %gravel is more than 16%. However, when the BM is deeper than ~32 m, the %gravel sharply decreases to about 4% (Figure 3d);
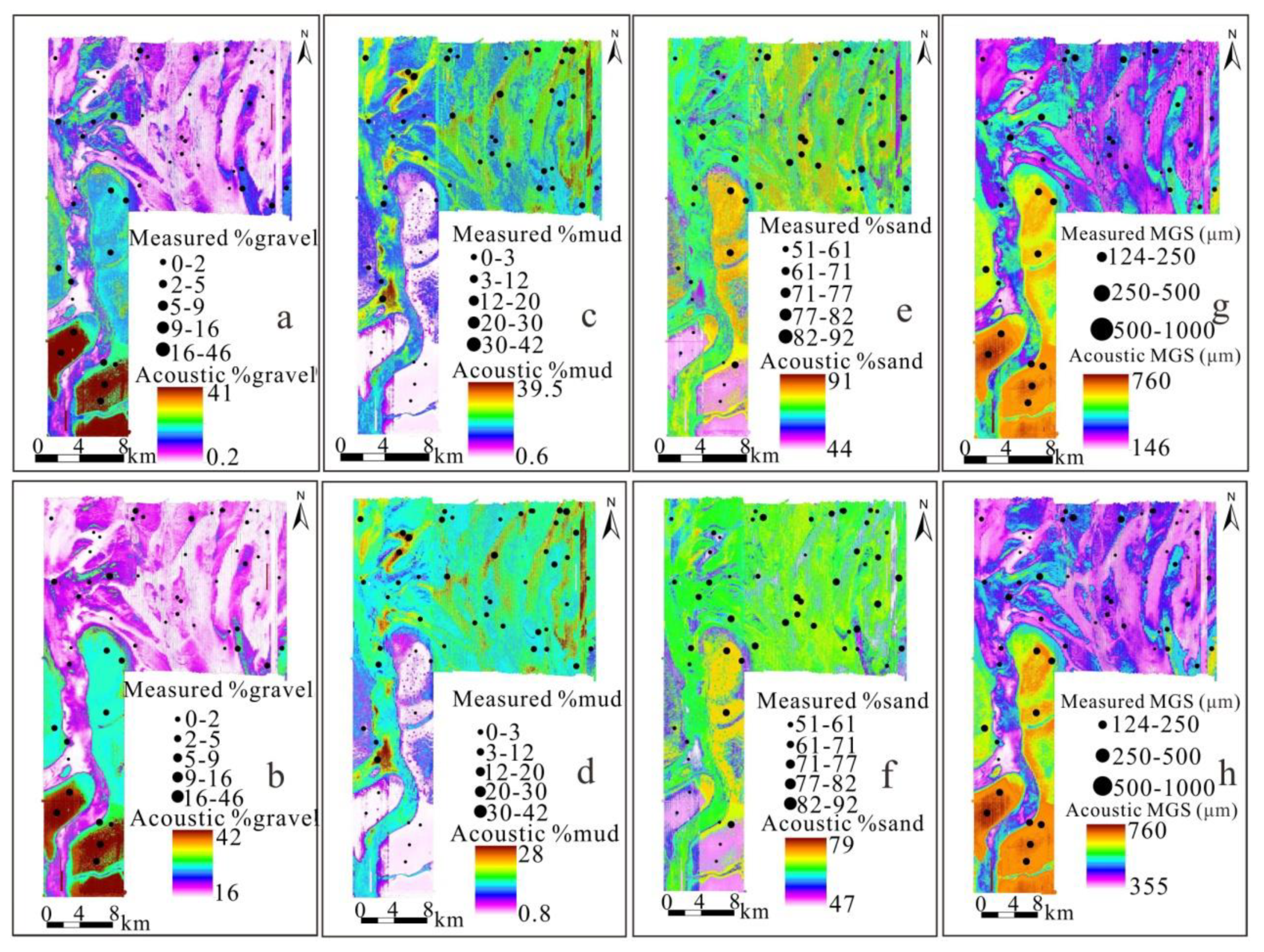
4.1.3. The Prediction Maps of the Sediment Grain Size Properties
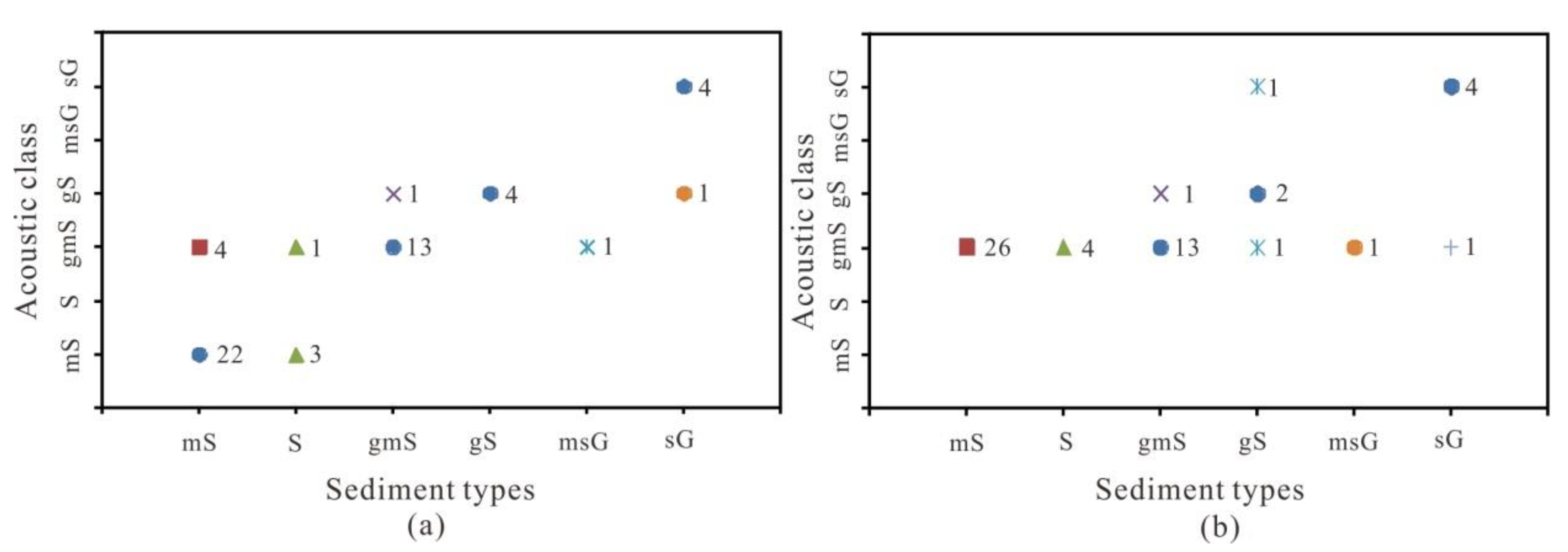
4.2. Prediction of Sediment Types
5. Discussions
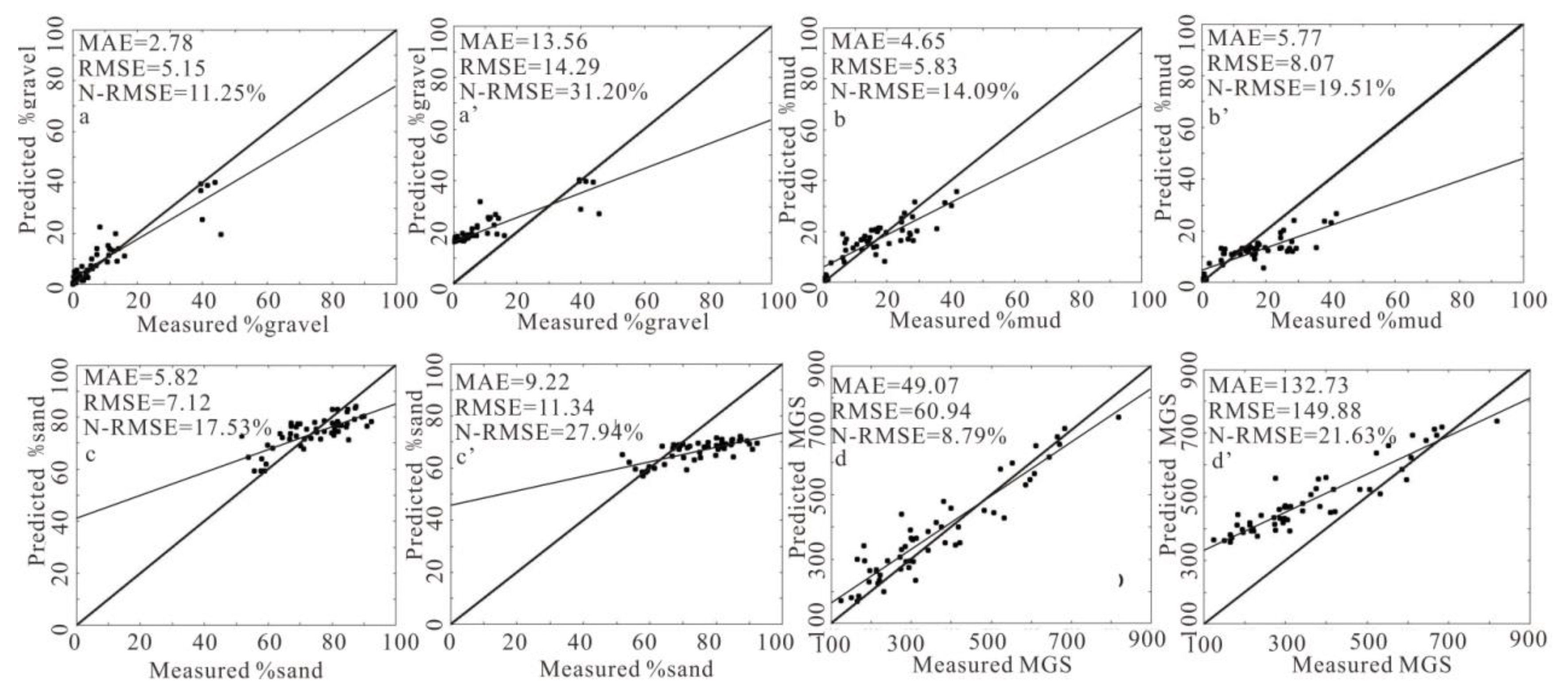
5.1. Evaluation of Model Prediction
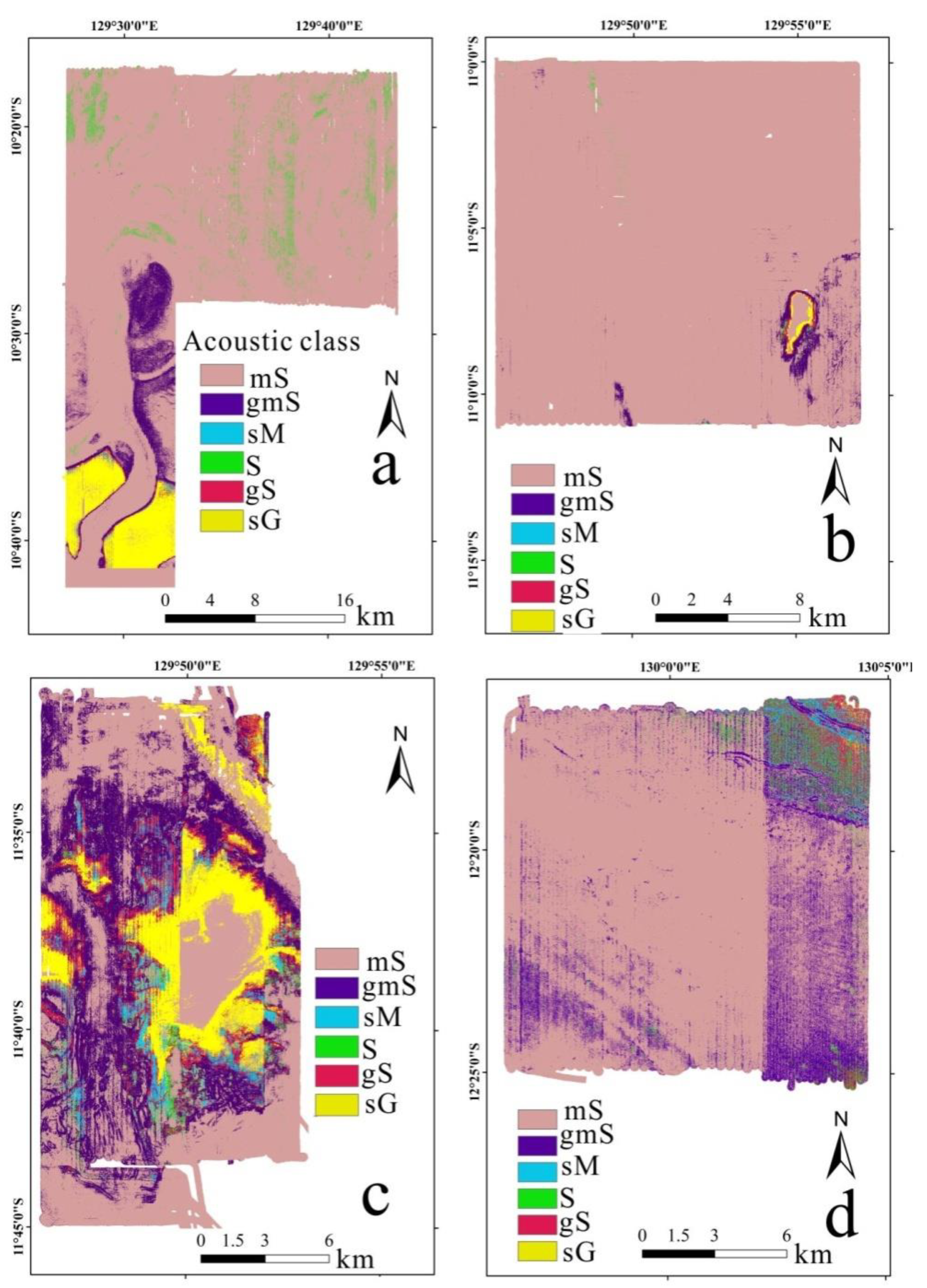
5.2. Predicted Sediment Distributions and Application
- For BP_A, there were six predicted classes. Among them, mS, S, gmS, and sG can be visually distinguished. The remaining two types (gS and sM) had smaller distribution areas. Compared with the measured sediment types, gmS disappeared in the acoustic types, but there was a type of sM in the acoustic class that was not in the measured types (Table 2 and Figure 8a);
- For BP_B, there were six predicted classes. Among them, gmS, mS, and sG could be clearly distinguished visually. The acoustic class of S was scattered sporadically in the area, and the acoustic class of sM was rarely distributed in this area. However, only four sediment types were measured (Table 2). Compared with the type of measurement, the type that disappeared in the acoustic type was the msG. However, there were three types of acoustic classes that were not included in the measured sediment. These were mS, sM and sG (Table 2 and Figure 8b);
- For BP_C, there were six predicted classes. The distribution of acoustic classes was complex. Through visual inspection, we found that the more distributed acoustic classes were mS, gmS, and sG. The remaining acoustic classes were sM, gS, and S. Compared with the measured sediment types, the type that disappeared in the acoustic type was msG (Table 2 and Figure 8c),
- For BP_D, there were six predicted classes. Most of the predicted classes were mS and gmS. The remaining classes were sM, S, gS and sG, and they were distributed in the northeast corner of the area. Compared with the measured sediment types, there were two types of sG and S in the acoustic class that were not measured (Table 2 and Figure 8d).
6. Conclusions
- (1)
- Using multibeam BM in addition to multibeam BS improves the sediment prediction performance. The prediction performance achieved an improvement of ~10% for %gravel and %mud. The overall accuracy of the sediment type prediction will be improved from 35.18% to 79.63%, the Kappa will be improved from 0.15 to 0.70, and in comparison, only BS was set as the explanatory variable;
- (2)
- The relationships between sediment properties and multibeam data are nonlinear. The %mud has a negative correlation with BS between −35 and −17 dB, but it is positively correlated with BM between 30 and 100 m. The %gravel has a positive correlation with BS between −36 and −12 dB. However, the relationship between %gravel and depth is poor, which indicates that this method is not suitable for deep water areas with high %gravel because of the unclear underlying relationship between %gravel and BM. The MGS has a positive correlation with BS between −37 and −19 dB, while it is negatively correlated with BM between 22 and 118 m.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Brown, C.J.; Smith, S.J.; Lawton, P.; Anderson, J.T. Benthic habitat mapping: A review of progress towards improved understanding of the spatial ecology of the seafloor using acoustic techniques. Estuar. Coast. Shelf Sci. 2011, 92, 502–520. [Google Scholar] [CrossRef]
- Cui, X.; Liu, H.; Fan, M.; Ai, B.; Ma, D.; Yang, F. Seafloor habitat mapping using multibeam bathymetric and backscatter intensity multi-features SVM classification framework. Appl. Acoust. 2021, 174, 107728. [Google Scholar] [CrossRef]
- Erdey-Heydorn, M.D. An ArcGIS seabed characterization toolbox developed for investigating benthic habitats. Mar. Geod. 2008, 31, 318–358. [Google Scholar] [CrossRef]
- Lanier, A.; Romsos, C.; Goldfinger, C. Seafloor habitat mapping on the oregon continental margin: A spatially nested GIS approach to mapping scale, mapping methods, and accuracy quantification. Mar. Geod. 2007, 30, 51–76. [Google Scholar] [CrossRef]
- Le Gonidec, Y.; Lamarche, G.; Wright, I.C. Inhomogeneous substrate analysis using EM300 backscatter imagery. Mar. Geophys. Res. 2003, 24, 311–327. [Google Scholar] [CrossRef]
- Courtney, R.C.; Shaw, J. Multibeam bathymetry and back-scatter imaging of the Canadian continental shelf. Geosci. Can. 2000, 27, 31–42. [Google Scholar]
- Goff, J.A.; Orange, D.L.; Mayer, L.A.; Clarke, J.E.H. Detailed investigation of continental shelf morphology using a high-resolution swath sonar survey: The Eel margin, northern California. Mar. Geol. 1999, 154, 255–269. [Google Scholar] [CrossRef]
- Ji, X.; Yang, B.; Tang, Q. Seabed sediment classification using multibeam backscatter data based on the selecting optimal random forest model. Appl. Acoust. 2020, 167, 107387. [Google Scholar] [CrossRef]
- Mitchell, N.C.; Clarke, J.E.H. Classification of seafloor geology using multibeam sonar data from the Scotian Shelf. Mar. Geol. 1994, 121, 143–160. [Google Scholar] [CrossRef]
- Snellen, M.; Gaida, T.C.; Koop, L.; Alevizos, E.; Simons, D.G. Performance of multibeam echosounder backscatter-based classification for monitoring sediment distributions using multitemporal large-scale ocean data sets. IEEE J. Ocean. Eng. 2019, 44, 142–155. [Google Scholar] [CrossRef] [Green Version]
- Huang, Z.; Brooke, B.P.; Harris, P.T. A new approach to mapping marine benthic habitats using physical environmental data. Cont. Shelf Res. 2011, 31, S4–S16. [Google Scholar] [CrossRef]
- Collier, J.S.; Brown, C.J. Correlation of sidescan backscatter with grain size distribution of surficial seabed sediments. Mar. Geol. 2005, 214, 431–449. [Google Scholar] [CrossRef]
- Ferrini, V.L.; Flood, R.D. A comparison of Rippled Scour Depressions identified with multibeam sonar: Evidence of sediment transport in inner shelf environments. Cont. Shelf Res. 2005, 25, 1979–1995. [Google Scholar] [CrossRef]
- Haris, K.; Chakraborty, B.; Ingole, B.; Menezes, A.; Srivastava, R. Seabed habitat mapping employing single and multibeam backscatter data: A case study from the western continental shelf of India. Cont. Shelf Res. 2012, 48, 40–49. [Google Scholar] [CrossRef]
- Huang, Z.; Siwabessy, J.; Nichol, S.L.; Brooke, B.P. Predictive mapping of seabed substrate using high-resolution multibeam sonar data: A case study from a shelf with complex geomorphology. Mar. Geol. 2014, 357, 37–52. [Google Scholar]
- Huang, Z.; Siwabessy, J.; Cheng, H.; Nichol, S.; Heqin, C. Using multibeam backscatter data to investigate sediment-acoustic relationships. J. Geophys. Res. Oceans 2018, 123, 4649–4665. [Google Scholar] [CrossRef]
- Urick, R.J. Principles of Underwater Sound; McGraw-Hill: New York, NY, USA, 1983. [Google Scholar]
- Fonseca, L.; Brown, C.; Calder, B.; Mayer, L.; Rzhanov, Y. Angular range analysis of acoustic themes from Stanton Banks Ireland: A link between visual interpretation and multibeam echo sounder angular signatures. Appl. Acoust. 2009, 70, 1298–1304. [Google Scholar] [CrossRef]
- De Falco, G.; Tonielli, R.; Di Martino, G.; Innangi, S.; Simeone, S.; Parnum, I. Relationships between multibeam backscatter, sediment grain size and Posidonia oceanica seagrass distribution. Cont. Shelf Res. 2010, 30, 1941–1950. [Google Scholar] [CrossRef]
- Davis, K.S.; Slowey, N.C.; Stender, I.H.; Fiedler, H.; Bryant, W.R.; Fechner, G. Acoustic backscatter and sediment textural properties of inner shelf sands, northeastern Gulf of Mexico. Geo Mar. Lett. 1996, 16, 273–278. [Google Scholar] [CrossRef]
- Goff, J.A.; Olson, H.C.; Duncan, C.S. Correlation of side-scan backscatter intensity with grain-size distribution of shelf sediments, New Jersey margin. Geo Mar. Lett. 2000, 20, 43–49. [Google Scholar] [CrossRef]
- Ryan, W.B.F.; Flood, R.D. Side-looking sonar backscatter response at dual frequencies. Mar. Geophys. Res. 1996, 18, 689–705. [Google Scholar] [CrossRef]
- Hamilton, L.J.; Parnum, I. Acoustic seabed segmentation from direct statistical clustering of entire multibeam sonar backscatter curves. Cont. Shelf Res. 2011, 31, 138–148. [Google Scholar] [CrossRef]
- Huang, Z.; Siwabessy, J.; Nichol, S.; Anderson, T.; Brooke, B. Predictive mapping of seabed cover types using angular response curves of multibeam backscatter data: Testing different feature analysis approaches. Cont. Shelf Res. 2013, 61–62, 12–22. [Google Scholar] [CrossRef]
- Mccullagh, D.; Benetti, S.; Plets, R.; Sacchetti, F.; O’Keeffe, E.; Lyons, K. Geomorphology and substrate of Galway Bay, Western Ireland. J. Maps 2020, 16, 166–178. [Google Scholar] [CrossRef]
- McGonigle, C.; Brown, C.; Quinn, R.; Grabowski, J. Evaluation of image-based multibeam sonar backscatter classification for benthic habitat discrimination and mapping at Stanton Banks, UK. Estuar. Coast. Shelf Sci. 2009, 81, 423–437. [Google Scholar] [CrossRef]
- Preston, J. Automated acoustic seabed classification of multibeam images of Stanton Banks. Appl. Acoust. 2009, 70, 1277–1287. [Google Scholar] [CrossRef]
- Clarke, J.H. Toward remote seafloor classification using the angular response of acoustic backscattering: A case study from multiple overlapping GLORIA data. IEEE J. Ocean. Eng. 1994, 19, 112–127. [Google Scholar] [CrossRef]
- Fonseca, L.; Mayer, L.A. Remote estimation of surficial seafloor properties through the application Angular Range Analysis to multibeam sonar data. Mar. Geophys. Res. 2007, 28, 119–126. [Google Scholar] [CrossRef]
- Dartnell, P.; Gardner, J.V. Predicting seafloor facies from multibeam bathymetric and backscatter data. Photogramm. Eng. Remote Sens. 2004, 70, 1081–1091. [Google Scholar] [CrossRef] [Green Version]
- Huang, Z.; Nichol, S.L.; Siwabessy, J.P.; Daniell, J.; Brooke, B.P. Predictive modelling of seabed sediment parameters using multibeam acoustic data: A case study on the Carnarvon Shelf, Western Australia. Int. J. Geogr. Inf. Sci. 2012, 26, 283–307. [Google Scholar] [CrossRef]
- Alevizos, E.; Greinert, J. The hyper-angular cube concept for improving the spatial and acoustic resolution of mbes backscatter angular response analysis. Geosciences 2018, 8, 446. [Google Scholar] [CrossRef] [Green Version]
- Hasan, R.C.; Ierodiaconou, D.; Laurenson, L. Combining angular response classification and backscatter imagery segmentation for benthic biological habitat mapping. Estuar. Coast. Shelf Sci. 2012, 97, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Friedman, J.H. Stochastic gradient boosing. Comput. Stat. Data Anal. 2002, 38, 367–378. [Google Scholar] [CrossRef]
- Ierodiaconou, D.; Monk, J.; Rattray, A.; Laurenson, L.; Versace, V.L. Comparison of automated classification techniques for predicting benthic biological communities using hydro-acoustics and video observations. Cont. Shelf Res. 2011, 31, S28–S38. [Google Scholar] [CrossRef]
- Rattray, A.; Ierodiaconou, D.; Laurenson, L.; Burq, S.; Reston, M. Hydro-acoustic remote sensing of benthic biological communities on the shallow South East Australian continental shelf. Estuar. Coast. Shelf Sci. 2009, 84, 237–245. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Hasan, R.C.; Ierodiaconou, D.; Laurenson, L.; Schimel, A. Integrating multibeam backscatter angular response; mosaic and bathymetry data for benthic habitat mapping. PLoS ONE 2014, 9, e97339. [Google Scholar]
- Diesing, M.; Green, S.L.; Stephens, D.; Lark, R.; Stewart, H.A.; Dove, D. Mapping seabed sediments: Comparison of manual, geostatistical, object-based image analysis and machine learning approaches. Cont. Shelf Res. 2014, 84, 107–119. [Google Scholar] [CrossRef] [Green Version]
- Lucieer, V.; Hill, N.A.; Barrett, N.S.; Nichol, S. Do marine substrates ‘look’ and ‘sound’ the same? Supervised classification of multibeam acoustic data using autonomous underwater vehicle images. Estuar. Coast. Shelf Sci. 2013, 117, 94–106. [Google Scholar] [CrossRef]
- Li, J.; Tran, M.; Siwabessy, J. Selecting optimal random forest predictive models: A case study on predicting the spatial distribution of seabed hardness. PLoS ONE 2016, 11, e0149089. [Google Scholar] [CrossRef]
- Cortes, C.; Vapnik, V. Support-vector networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Hasan, R.C.; Ierodiaconou, D.; Monk, J. Evaluation of four supervised learning methods for benthic habitat mapping using backscatter from multi- beam sonar. Remote Sens. 2012, 4, 3427–3443. [Google Scholar] [CrossRef] [Green Version]
- Marsh, I.; Brown, C. Neural network classification of multibeam backscatter and bathymetric data from Stanton Bank (Area IV). Appl. Acoust. 2009, 70, 1269–1276. [Google Scholar] [CrossRef]
- Brown, C.J.; Collier, J.S. Mapping benthic habitat in regions of gradational substrata: An automated approach utilizing geophysical, geological, and biological relationships. Estuar. Coast. Shelf Sci. 2008, 78, 203–214. [Google Scholar] [CrossRef]
- Francke, T.; López-Tarazón, J.; Schröder, B. Estimation of suspended sediment concentration and yield using linear models, random forests and quantile regression forests. Hydrol. Process. 2008, 22, 4892–4904. [Google Scholar] [CrossRef]
- Anderson, T.J.; Nichol, S.; Radke, L.; Heap, A.D.; Battershill, C.; Hughes, M.; Siwabessy, P.J.; Barrie, V.; De Glasby, B.A.; Tran, M.; et al. Seabed Environment of the Eastern Joseph Bonaparte Gulf, Northern Australia; SOL 4934—Post-Survey Report; Geoscience Australia: Canberra, Australia, 2010; p. 78. [Google Scholar]
- Przeslawski, R.; Daniell, J.; Anderson, T.; Barrie, J.V.; Heap, A.; Hughes, M.; Li, J.; Potter, A.; Radke, L.; Siwabessy, J.; et al. Seabed Habitats and Hazards of the Joseph Bonaparte Gulf and Timor Sea, Northern Australia; Geoscience Australia: Canberra, Australia, 2011; p. 69, Record 2011/40. [Google Scholar]
- Anderson, T.J.; Nichol, S.; Radke, L.; Heap, A.D.; Battershill, C.; Hughes, M.; Siwabessy, P.J.; Barrie, V.; De Glasby, B.A.; Tran, M.; et al. Seabed Environments of the Eastern Joseph Bonaparte Gulf, Northern Australia; GA0325/Sol5117—Post-Survey Report; Geoscience Australia: Canberra, Australia, 2011. [Google Scholar]
- Lees, B.G. Recent terrigenous sedimentation in Joseph Bonaparte Gulf, Northwestern Australia. Mar. Geol. 1992, 103, 199–213. [Google Scholar] [CrossRef]
- Lewis, D.W.; Mcconchie, D. Analytical Sedimentology; Springer: New York, NY, USA, 1994. [Google Scholar]
- Folk, R.L. Petrology of Sedimentary Rocks: Austin; Hemphill Publishing: Austin, TX, USA, 1968; Volume 21, pp. 714–727. [Google Scholar]
- Lamarche, G.; Lurton, X. Recommendations for improved and coherent acquisition and processing of backscatter data from seafloor-mapping sonars. Mar. Geophys. Res. 2017, 39, 5–22. [Google Scholar] [CrossRef] [Green Version]
- Gavrilov, A.N.; Siwabessy, P.J.W.; Parnum, I.M. Multibeam Echo Sounder Backscatter Analysis: Theory Review, Methods and Application to Sydney Harbour Swath Data; Centre for Marine Science and Technology: Perth, Australian, 2005. [Google Scholar]
- Gavrilov, A.N.; Duncan, A.J.; McCauley, R.D.; Parnum, I.M.; Penrose, J.D.; Siwabessy, P.J.W.; Woods, A.J.; Tseng, Y.-T. Characterization of the seafloor in Australia’s coastal zone using acoustic techniques. In Proceedings of the 1st International Conference in Underwater Acoustic Measurements: Technologies & Results, Crete, Greece, 28 June–1 July 2005. [Google Scholar]
- De Moustier, C.; Alexandrou, D. Angular dependence of 12-kHz seafloor acoustic backscatter. J. Acoust. Soc. Am. 1991, 90, 522–531. [Google Scholar] [CrossRef]
- Jackson, D.; Winebrenner, D.P.; Ishimaru, A. Application of the composite roughness model to high-frequency bottom backscattering. J. Acoust. Soc. Am. 1986, 79, 1410–1422. [Google Scholar] [CrossRef]
- Lurton, X.; Lamarche, G.; Brown, C.; Rice, G.; Schimel, A.; Weber, T. Backscatter Measurements by Seafloor-Mapping Sonars—Guidelines and Recommendations; Technical Report; GEOHAB: Oostende, Belgium, 2015; pp. 1–200. [Google Scholar]
- Parnum, I.M.; Gavrilov, A.N. High-frequency multibeam echo-sounder measurements of seafloor backscatter in shallow water: Part 2—Mosaic production, analysis and classification. Underw. Technol. Int. J. Soc. Underw. 2011, 30, 13–26. [Google Scholar] [CrossRef]
- Weiss, A.D. Topographic position and landforms analysis. In Proceedings of the ESRI International User Conference, San Diego, CA, USA, 9–13 July 2001. [Google Scholar]
- Jenness, J.S. Calculating landscape surface area from digital elevation models. Wildl. Soc. Bull. 2004, 32, 829–839. [Google Scholar] [CrossRef]
- Huang, Z.; McArthur, M.; Radke, L.; Anderson, T.; Nichol, S.; Siwabessy, J.; Brooke, B. Developing physical surrogates for benthic biodiversity using co-located samples and regression tree models: A conceptual synthesis for a sandy temperate embayment. Int. J. Geogr. Inf. Sci. 2012, 26, 2141–2160. [Google Scholar] [CrossRef]
- Lecours, V.; Brown, C.; Devillers, R.; Lucieer, V.; Edinger, E.N. Comparing selections of environmental variables for ecological studies: A focus on terrain attributes. PLoS ONE 2016, 11, e0167128. [Google Scholar] [CrossRef] [Green Version]
- Lucieer, V.L. Object-oriented classification of sidescan sonar data for mapping benthic marine habitats. Int. J. Remote Sens. 2007, 29, 905–921. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Seabed Sample Types | Radio of Sand to Mud | %Gravel | Number of Samples |
|---|---|---|---|
| sandy Gravel (sG) | >9 | 30–80% | 9 |
| muddy sandy Gravel (msG) | 1–9 | 30–80% | 5 |
| gravelly Sand (gS) | >9 | 5–30% | 9 |
| gravelly muddy Sand (gmS) | 1–9 | 5–30% | 59 |
| Sand (S) | >9 | <5% | 6 |
| muddy Sand (mS) | 1–9 | <5% | 39 |
| sandy Mud (sM) | <9 | <5% | 4 |
| sG | msG | gS | gmS | S | mS | sM | Numbers | |
|---|---|---|---|---|---|---|---|---|
| BP_A | 5 | 1 | 4 | 14 | 4 | 26 | -- | 54 |
| BP_B | -- | 2 | 1 | 14 | 1 | -- | -- | 18 |
| BP_C | 4 | 2 | 3 | 7 | 1 | 3 | 3 | 23 |
| BP_D | -- | -- | 1 | 25 | -- | 10 | 1 | 37 |
| Numbers | 9 | 5 | 9 | 60 | 6 | 39 | 4 | 132 |
| Iterations | %Gravel (R2) | %Mud (R2) | MGS(R2) |
|---|---|---|---|
| Initial experiment | 15° (0.57) | 13° (0.38) | 14° (0.76) |
| 1st | 18° (0.66) | 21° (0.46) | 48° (0.82) |
| 2nd | 34° (0.68) | 17° (0.45) | 25° (0.84) |
| 3rd | 27° (0.65) | — | 33° (0.85) |
| 6th | — | — | 22° (0.86) |
| 7th | — | — | 27° (0.85) |
| Iterations | %Gravel (R2) | %Mud (R2) | MGS (R2) |
|---|---|---|---|
| Initial experiment | 15° (0.57) | 13° (0.39) | 14° (0.76) |
| 1st | BM (0.74) | BM (0.53) | BM (0.82) |
| 2nd | 34° (0.77) | 21° (0.57) | 24° (0.852) |
| 3rd | 48° (0.65) | 16° (0.56) | 48° (0.849) |
| Sediment Grain Size Property | Relative Importance of Characteristic Variables |
|---|---|
| Mud | 13° (100%), 21° (77.56%), depth (73.64%) |
| Gravel | 15° (100%), 34° (97.95%), depth (88.09%) |
| MGS | 14° (100%), 24° (94.90%), depth (86.53%) |
| Iterations | Explanatory Variable | Classified Percentage |
|---|---|---|
| Initial experiment | Surface area | 42.47 |
| 1st | depth | 55.56 |
| 2nd | 40° | 63.80 |
| 3rd | 9° | 64.16 |
| 4th | 10° | 63.80 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, W.; Cheng, H.; Zheng, S.; Hu, H. Predicted Mapping of Seabed Sediments Based on MBES Backscatter and Bathymetric Data: A Case Study in Joseph Bonaparte Gulf, Australia, Using Random Forest Decision Tree. J. Mar. Sci. Eng. 2021, 9, 947. https://doi.org/10.3390/jmse9090947
Xu W, Cheng H, Zheng S, Hu H. Predicted Mapping of Seabed Sediments Based on MBES Backscatter and Bathymetric Data: A Case Study in Joseph Bonaparte Gulf, Australia, Using Random Forest Decision Tree. Journal of Marine Science and Engineering. 2021; 9(9):947. https://doi.org/10.3390/jmse9090947
Chicago/Turabian StyleXu, Wei, Heqin Cheng, Shuwei Zheng, and Hao Hu. 2021. "Predicted Mapping of Seabed Sediments Based on MBES Backscatter and Bathymetric Data: A Case Study in Joseph Bonaparte Gulf, Australia, Using Random Forest Decision Tree" Journal of Marine Science and Engineering 9, no. 9: 947. https://doi.org/10.3390/jmse9090947
APA StyleXu, W., Cheng, H., Zheng, S., & Hu, H. (2021). Predicted Mapping of Seabed Sediments Based on MBES Backscatter and Bathymetric Data: A Case Study in Joseph Bonaparte Gulf, Australia, Using Random Forest Decision Tree. Journal of Marine Science and Engineering, 9(9), 947. https://doi.org/10.3390/jmse9090947