1. Introduction
The path-following and roll reduction are two important control objectives in ship motion control problems. Traditionally, the path-following problem and roll reduction problem are studied separately, due to the fact that they have totally different control objectives and strategies. In path-following problem, the rudder is usually the only control input if the propeller revolution is constant. However, in the roll reduction problem, additional devices are usually used to provide effective roll reduction; for example, moving weights [
1], anti-rolling tanks [
2], bilge keels [
3], gyroscopic stabilizers [
4], and stabilizing fins [
5] were widely studied and used as roll reduction devices.
Rudders are designed to control the heading and position of a ship, to make the ship move along the given course, or turn when required. In the process of course-keeping or path-following, the relatively small rudder force often limits the use of the rudder in roll reduction control, mainly due to the following facts: firstly, the slew rate saturation of the steering gear makes it difficult to control the high-frequency roll motion; secondly, the high-frequency rudder operation may cause the wear and tear of the rudder; thirdly, the fast rudder operation may affect the course-keeping or path-following performance.
Despite the above limitations, for a long time the Rudder Roll Stabilization (RRS) control system has attracted great interest from the ship motion control community. This is mainly because the RRS control system does not need any additional expensive devices, thus is cheap and convenient. In the 1980s, the basic RRS control strategies were put forward by Källström [
6], Van der Klugt [
7], Källström et al. [
8]. During the 1990s, more advanced control laws and analyses were presented by Blanke et al. [
9], Van Amerongen et al. [
10], Blanke and Christensen [
11], Lauvdal and Fossen [
12]. In the last two decades, Perez [
13], Perez and Blanke [
14] carried out a comprehensive study on RRS in the course-keeping problem; Ren et al. [
15] introduced singular perturbation method for the RRS problem.
Nowadays, by designing a more powerful rudder, it is possible for the rudder to have a large enough bandwidth to control the high-frequency roll motion. On the other hand, the RRS control should only be used in some emergency situations, such as when the ship encounters severe wave disturbances which may cause a dangerous roll motion. For the most time, the RRS control is not used, thus the wear and tear problem is very limited. It is well known that there exists the so-called bandwidth separation characteristic in many of the four degrees of freedom (4-DoF) (surge, sway, roll, and yaw) motion systems of surface ships [
14,
16]. This bandwidth separation characteristic guarantees that there is a large enough bandwidth separation gap between the yaw motion system and the roll motion system, thus the control input in a system has a very limited interference effect on the other system.
The study on RRS control system may be traced back to the pioneering work by Cowley and Lambert [
17], and the original research on the design of RRS was carried out mainly in the 1980s. The studies that were the basis for real implementations can be found in Källstrom [
6], Van der Klugt [
7], Van Amerongen et al. [
10], Blanke et al. [
9,
18], Grimble et al. [
19], Lauvdal and Fossen [
12], and Crossland [
20], among others. In these studies, however, the control objective was limited to RRS control in the course-keeping problem. During the last two decades, the roll reduction control in the path-following problem has drawn a lot of interest from the ship motion control community. Most of the analyses are in the time-domain framework, where the state space equations are given and the details of the system information can be tracked. Besides, the stability analysis can also be conducted in the time domain. Fang and Luo [
21] studied the track-keeping problem with roll reduction control by using separated sliding mode controllers. Li et al. [
22] considered the roll angle constraints in the path-following problem by using the model predictive control (MPC) approach. Liu et al. [
23] combined the line-of-sight strategy and the MPC method to the roll control in the path-following problem. However, most of the studies used the separated model of the 4-DoF ship motion system, and there were seldom an analytical framework and techniques to handle the coupling effects between the roll motion and the maneuvering motion in the horizontal plane. Few studies concentrated on the analysis of the 4-DoF ship motion system with different time-scale characteristics.
In this paper, a time-scale decomposition method is introduced to the RRS control system in the path-following problem, where the rudder is the only input for both the heading control and the roll reduction control. The time-scale analysis strategy offers a new analytical framework for considering the coupling effects of the 4-DoF ship motion system. This technique is used to decouple the ship motion system into a subsystem of slow heading control and a subsystem of fast roll motion control. The coupling effects between the two subsystems of different time scales are taken into account, which is of great importance in a path-following problem.
It is well known that the roll motion is generally much faster than the motions of other DoFs. The interaction between the opposite effects of fast and slow dynamic systems causes the non-minimum phase (NMP) phenomenon in the 4-DoF ship motion system. The NMP system has an inverse initial response and a large phase lag, which is considered as a major challenge for RRS control system design [
13,
24]. In this paper, a time-scale analysis technique based on a singular perturbation strategy is used to decouple the motions of different time scales. The possibility for the singular perturbation method being used in the RRS control system in course-keeping problems has been explored in the previous study [
15]. In this paper, the singular perturbation equations are introduced to describe the 4-DoF motion of a surface ship in the path-following problem with RRS control.
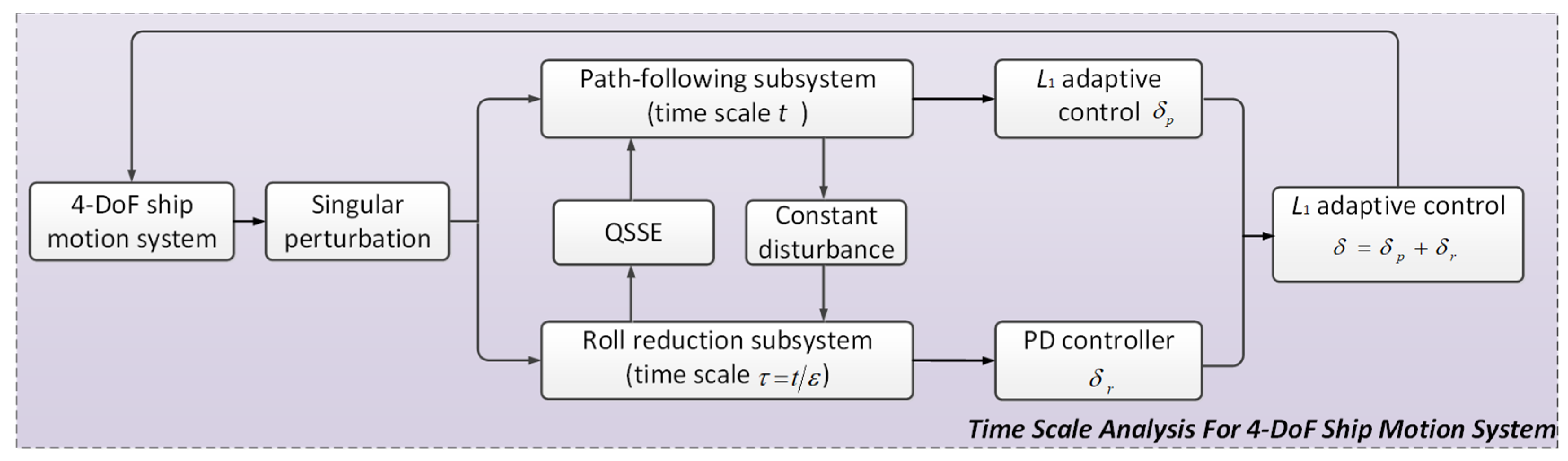
The overall scheme of the time-scale analysis is shown in
Figure 1. By following the standard singular perturbation procedures, the whole system is decoupled into two subsystems of different time scales, namely the slow path-following subsystem and the fast roll motion subsystem. A new time scale
τ is introduced to describe the roll motion subsystem. Under such a time scale, the coupling effect from the slow subsystem can be regarded as a constant disturbance to the fast subsystem. The so-called quasi-steady-state equilibrium (QSSE) is introduced to pass information between the subsystems of different time scales. The control objectives and strategies of these two subsystems are treated separately, and the overall control input is set as the sum of the rudder commands of these two subsystems.
Different from the typical course-keeping problem, the RRS control in the path-following problem is much more complicated. Due to the complex curve path tracking motion and time-varying wave disturbances, large uncertainties of the model and its parameters are added into the motion system. Enough input bandwidth separation should be guaranteed to avoid the interference between different subsystems in the RRS control system [
15], which is particularly difficult during the path-following problem. In reality, the fast time-varying wave disturbances may cause the slow motion of some high-frequency components; if these high-frequency components are fed into the slow path-following subsystem, the control performance of the fast roll motion will be severely affected [
25]. Thus, to gain good performances in both of the two time-scale subsystems, the control strategy in the slow path-following subsystem is most important.
To deal with this system uncertainty and filter the high-frequency disturbances in the slow subsystem, the
adaptive control strategy is introduced. It was first introduced in aircraft control community [
26]. This adaptive control strategy has a fast adaption speed and is applicable for systems with a large system uncertainty and time-varying characteristics. It has been introduced to the field of ship motion control in recent years [
27,
28,
29], but has not yet been used for RRS control.
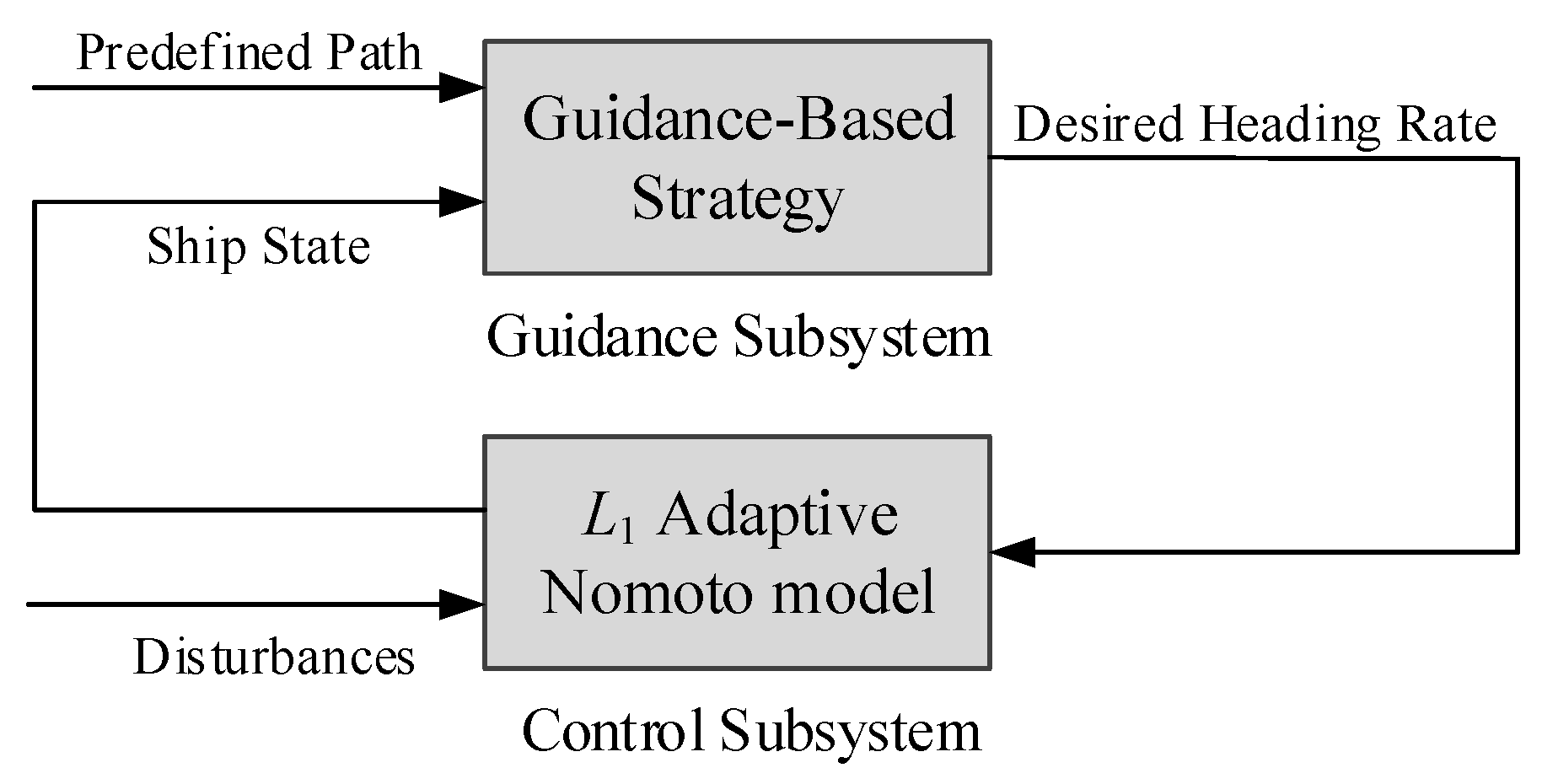
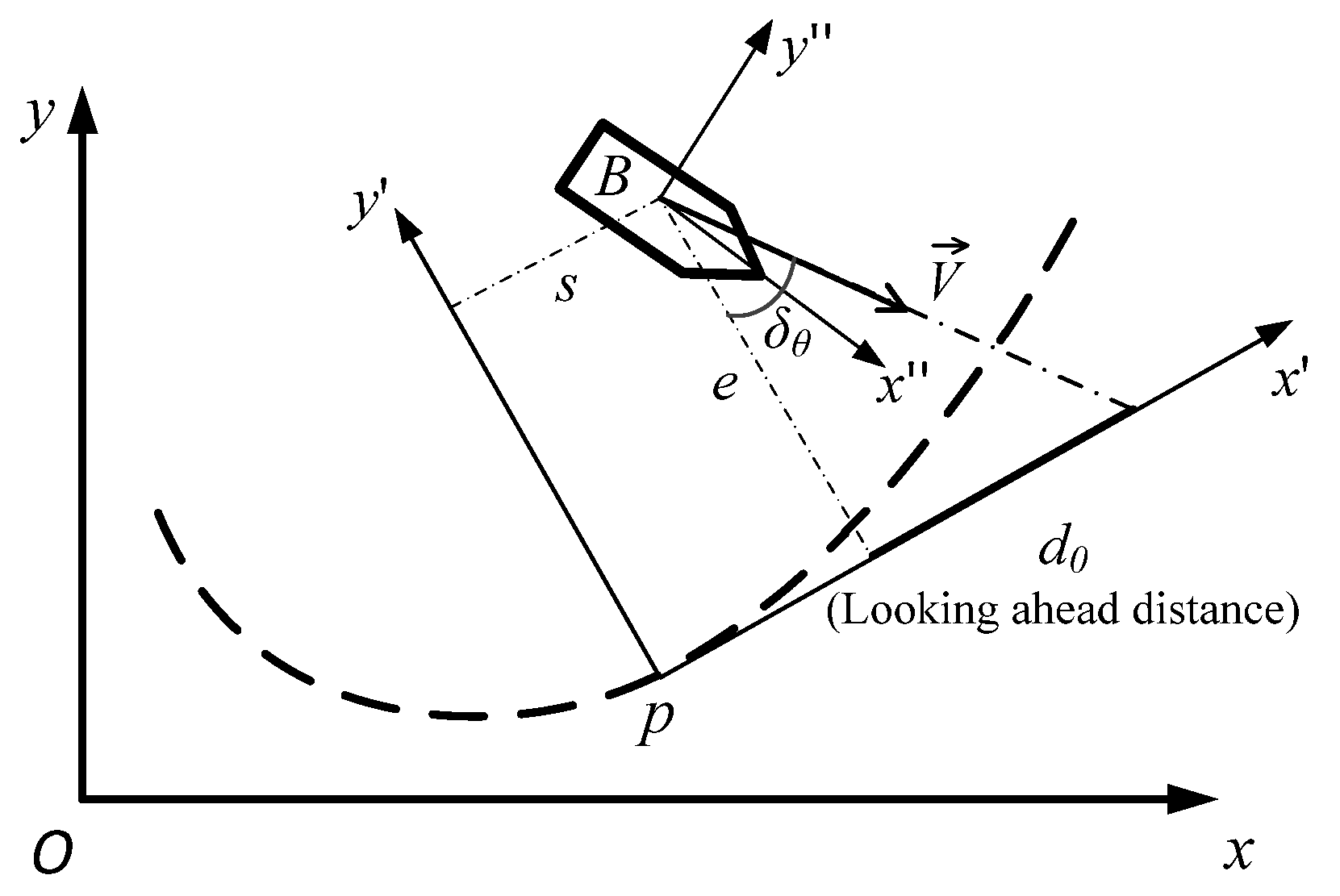
In this paper, the slow path-following subsystem is decoupled into a guidance subsystem and a control subsystem. A revised Serret–Frenet frame is adopted in the guidance subsystem to describe the ship motion in a path-fixed frame [
30]. An adaptive Nomoto model is used in the control subsystem to describe the dynamics of the yaw motion in the revised Serret–Frenet frame. A time-varying parameter is introduced to capture the uncertainty of the model and is identified by the
adaptive law. The
adaptive control has a fast adaption speed and can deal with system uncertainties, thus is quite suitable for the path-following subsystem, which has large system uncertainties [
28]. Moreover, there is a low-pass filter in the
adaptive law which can filter the high-frequency components and give a smooth control input to the slow path-following subsystem, thus guaranteeing the input bandwidth separation.
In the roll reduction subsystem, a Proportion-Differentiation (PD) controller has a good roll reduction performance in the wave regime it is tuned for. Yet, different from the traditional separate control, where the interaction between the roll motion and the motions of other DoFs is seldom considered [
21], the coupling effect is considered by introducing QSSE in this paper. In the stretched time scale
τ, the coupling effect from the slow path-following subsystem in terms of rudder offsets can be regarded as a constant disturbance to the roll reduction subsystem. The coupling effect is important in the path-following problem. For example, there is a steady roll angle during the steady turning of a ship, which should be taken into the feedback law of the roll reduction control. In fact, this roll angle reflects the interaction effect of the slow path-following dynamics on the fast roll motion.
In this paper, the ship motion control problem of path-following in the horizontal plane with a simultaneous roll reduction is studied. By neglecting the heave and pitch motions in the vertical plane, a 4-DoF (surge, sway, roll, and yaw) maneuvering motion model is adopted. A comprehensive 4-DoF maneuvering motion model of a high-speed container ship [
16,
31] is used for the simulation study. Based on a set of captive model tests with varying heel angles, the 4-DoF equations of coupled surge–sway–roll–yaw motions are derived [
31]. This maneuvering motion model is often used as the benchmark model to evaluate ship motion control performance, especially when taking the effect of roll motion into account.
The rest of the paper is structured as follows: In
Section 2, a brief introduction of the singular perturbation approach used for the 4-DoF ship motion control system is given. In
Section 3, the control laws for the slow and fast subsystems are designed.
Section 4 shows the simulation results. The conclusions drawn from this study are presented in
Section 5.
4. Simulation Results
A nonlinear 4-DoF (surge, sway, roll, and yaw) maneuvering motion model of a single-screw, high-speed container ship [
16,
31] is used to evaluate the performances of the derived path-following and RRS control laws. This nonlinear model is widely used as a benchmark model in the field of ship motion control to evaluate the performances of different control strategies. The principal particulars of the ship are given in
Table 1. More details of the nonlinear model can be found in [
16].
The wave disturbances are modeled by shape functions, which are actually second-order linear approximations of the Pierson–Moskowitz spectral density functions. This kind of wave model is widely used in RRS control systems for its simplicity and validity [
12,
38].
Considering the wave direction, the disturbances in the path-following subsystem and the roll reduction subsystem,
and
, can be described as:
where
is the Gaussian white noise with a variance
and a zero mean;
is the wave direction. Without loss of generality,
is assumed to be zero. The shaping filters,
and
, are expressed as:
where
and
denote the dominated wave strength coefficients of yaw and roll motions. The terms
and
are the damping coefficient and the encountered wave frequency. Their values are selected as
,
,
,
, according to O’Brien [
38]. These values are chosen to create a relatively large roll motion to evaluate the RRS performance; for example,
is selected as 0.23 because it is near the ship’s natural frequency (
rad/s).
A fourth-order Runge–Kutta method is used in the simulation of ship motion. The rudder saturation and rate limits () are considered in the simulation. The total speed of the ship is around 7.2 m/s. The initial values of the state variables and ship position are selected as: and X0 −8000 m, and Y0 6000 m.
The control law parameters for the path-following subsystem are selected as: , , , , , , , and . The control law parameters for the roll reduction subsystem are selected as and . The values of the control law parameters are determined by the method of trial and error, but also with some physical insight. For example, the controller gain parameter is tuned to have a fast response according to the roll motion subsystem Equation (44); the damping coefficient is tuned to have a proper damping speed to the roll motion considering the rudder constraint.
Figure 4 describes the slow path-following performances with and without
adaptive control, both with simultaneous RRS control. The blue solid line describes the predefined path for the ship to track. There are three special points, points A, B, and C, which represent three very different turning points in the path. Point A has a relatively small curvature, point B has a medium one, and point C has a maximum curvature in the path. This path is designed as general enough to evaluate the path-following performance of the control system.
In
Figure 4, the red dashed line describes the performance without the
adaptive control. It can be seen that the control system has a relatively fast response speed, but with much larger overshoots. The control input cannot give a stable output under wave disturbances, thus there must be a lot of unnecessary rudder commands in this situation. The black solid line describes the performance with the
adaptive control; it is shown that the trajectory is much smoother. The system turns to be stable in a short time and the control output is quite robust even with system uncertainties. There are some relatively large deviations near the point B; this is mainly caused by the geometrical complexity of the path and the large looking-ahead distance
in this situation. The control output may have some unavoidable tracking errors due to this feedforward geometric information. However, it is necessary to have a large enough
to guarantee the stable performance. Thus, it is necessary to make a tradeoff between the accuracy and the stability of the control system. For the RRS control in path-following problem, the stability is considered as more important than the tracking accuracy, because it is impossible to have an effective RRS performance without a stable path-following output.
Figure 5 demonstrates the performance of the error dynamics. It actually contains the same information as shown in
Figure 4, but with a clearer sight of the tangential and cross-tracking errors described in the revised Serret–Frenet frame. As shown in the upper subfigure of
Figure 5, the tangential error converges to zero in a very short time. It should be noted that the tangential updating law of frame
P is governed by
in Equation (24). Since the tangential error remains zero for most of the time, the revised Serret–Frenet frame is actually the same as the traditional Serret–Frenet frame. The lower subfigure of
Figure 5 describes the cross errors in the cases with and without the
adaptive control. Without the
adaptive control, the cross error has a much larger transient overshoot and the system is not stable in a limited time. On the other hand, the performance is much better in the case with the
adaptive control. The cross error has very small overshoots and tends to give a relatively stable cross-tracking performance, despite some small deviations.
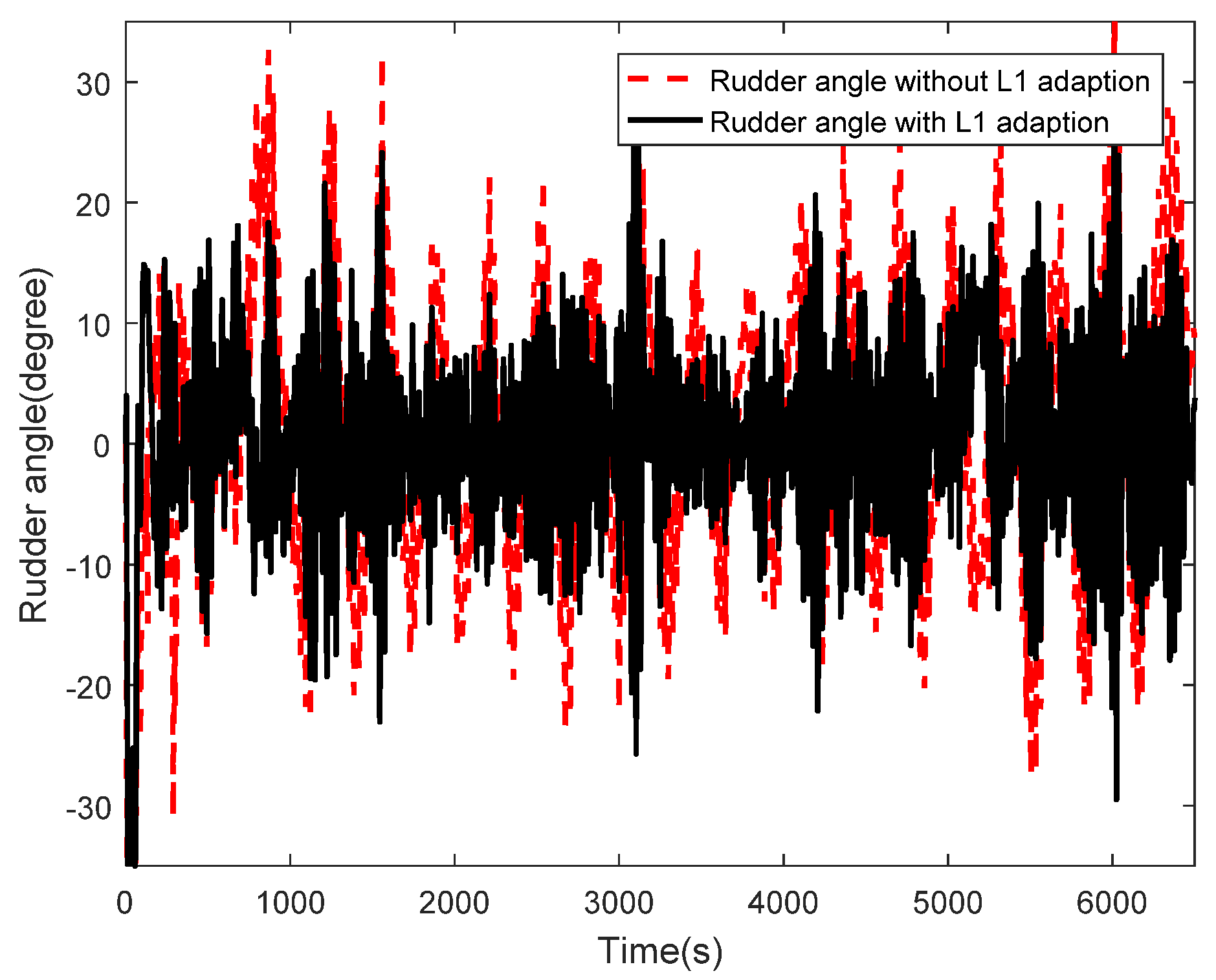
Figure 6 shows the rudder angles with and without
adaptive control, both with RRS control at the same time. The black solid line describes the rudder angle with
adaptive control, whose amplitude is smaller than that of the red dashed line for the rudder angle without
adaptive control.
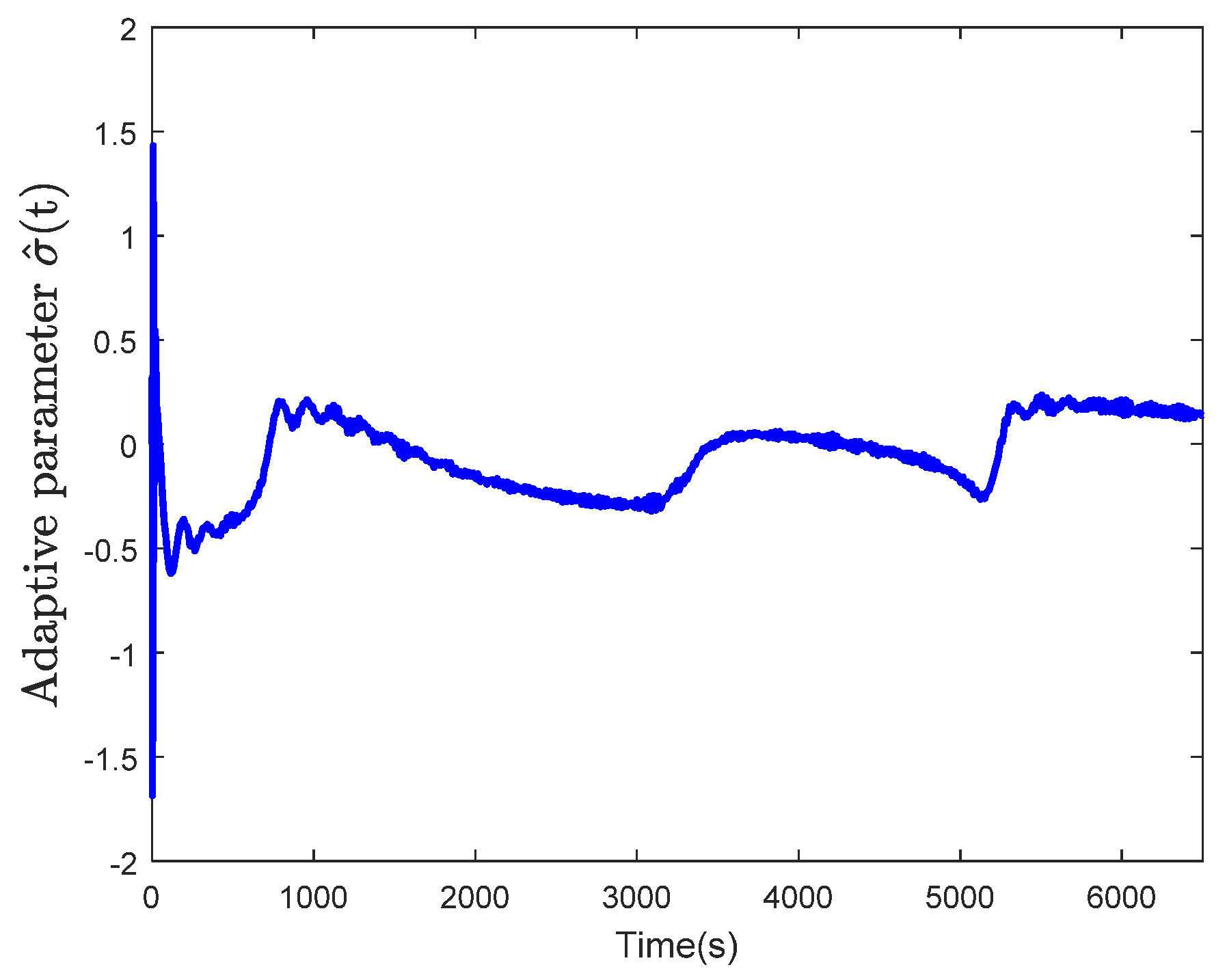
Figure 7 presents the prediction value of the adaptive parameter
. The value of
demonstrates the uncertainty of the system and varies with the states of the system. As shown in
Figure 7, the geometrical change of the path can be reflected in
, which has different slow-varying values at different tracking stages according to the path. The system uncertainty caused by the curve path is captured by
in this way. It also shows that
tends to exhibit a chattering phenomenon at the initial time and each turning point. The sudden change of the states adds large uncertainty to the system and may cause the chattering of
. In some sense, the chattering is inevitable in most adaptive control methods. However, the
adaptive control has a fast adaption speed, and the value of
can become stable after a very short time, which guarantees the good performance of the path-following subsystem in the long term.
.
Figure 8 shows the comparison between the desired heading angle in the guidance subsystem and the actual heading angle with the
adaptive control. As it can be seen, both of the desired and actual heading angles can reflect the geometrical change of the path. The actual heading angle cannot track the desired heading angle for all time, since the curvature of the designed curve is large and the ship’s maneuverability is poor. However, the trends of the actual and desired heading angles are consistent; in some relatively flat parts of the path, the actual heading angle can track the desired angle with considerably high accuracy, demonstrating the good control performance. There is also a chattering phenomenon in the actual heading angle at the initial time and the sudden turning points, which is caused by the chattering of
entering the feedback loop. Fortunately, the performance becomes stable after a short time.
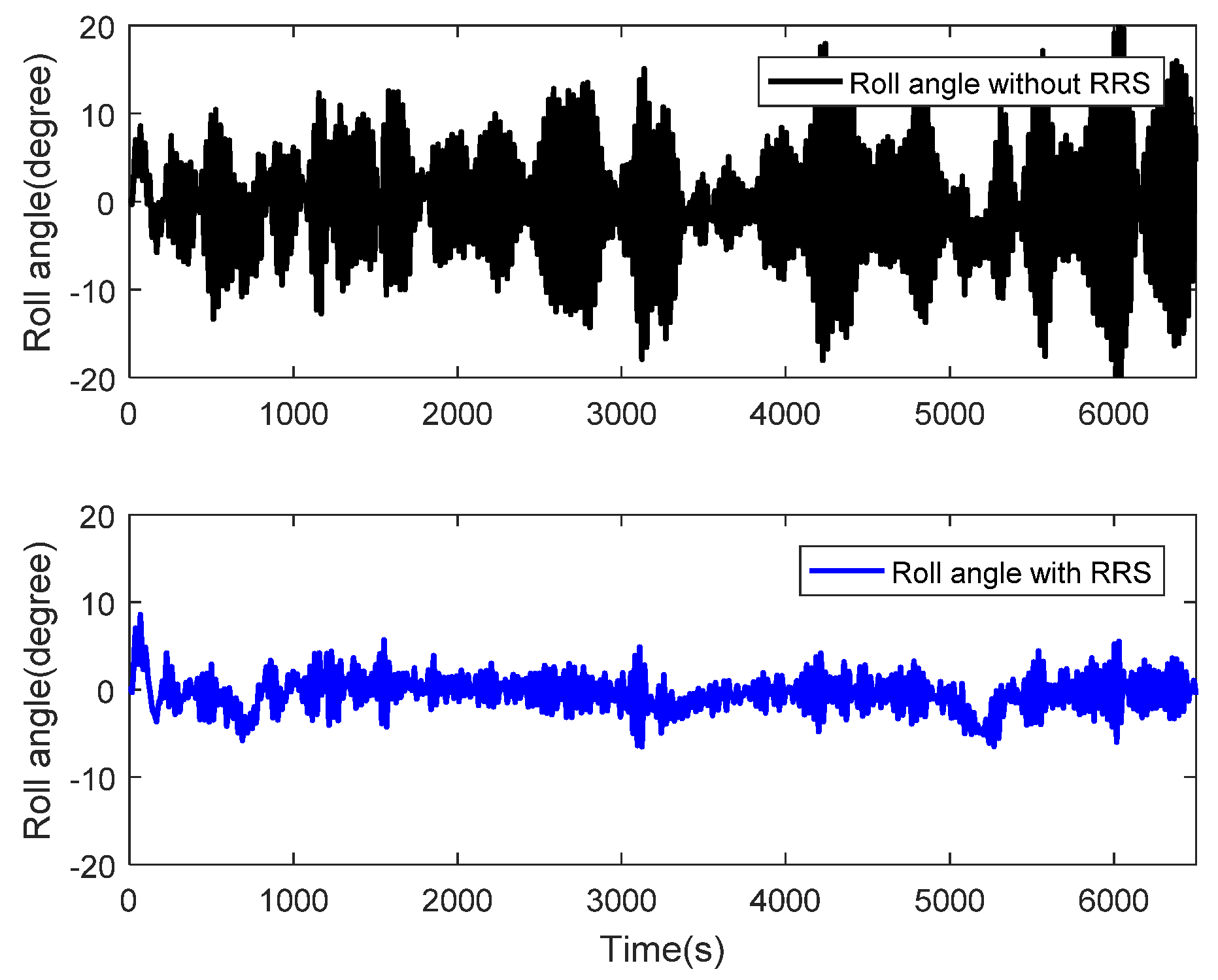
Figure 9 shows the performances of the roll reduction subsystem with and without the RRS control strategy. In these two cases, the
adaptive control is ON in the simulation. It is easy to find out that there is a large rate of roll reduction when the subsystem has the RRS control. Without the RRS control, the roll angle is around 10° for most of the time. The peak value can reach to over 20° under the wave disturbances. However, with the RRS control the roll angle is reduced to less than 5° for most of the time. To evaluate the roll reduction performance, a so-called Roll Reduction Rate (
RRR) is introduced. It is defined as [
24]:
where
RRCS and
AP are the standard deviations with and without RRS, respectively. Under this definition, the
RRR is 69.2(%) in this simulation case.
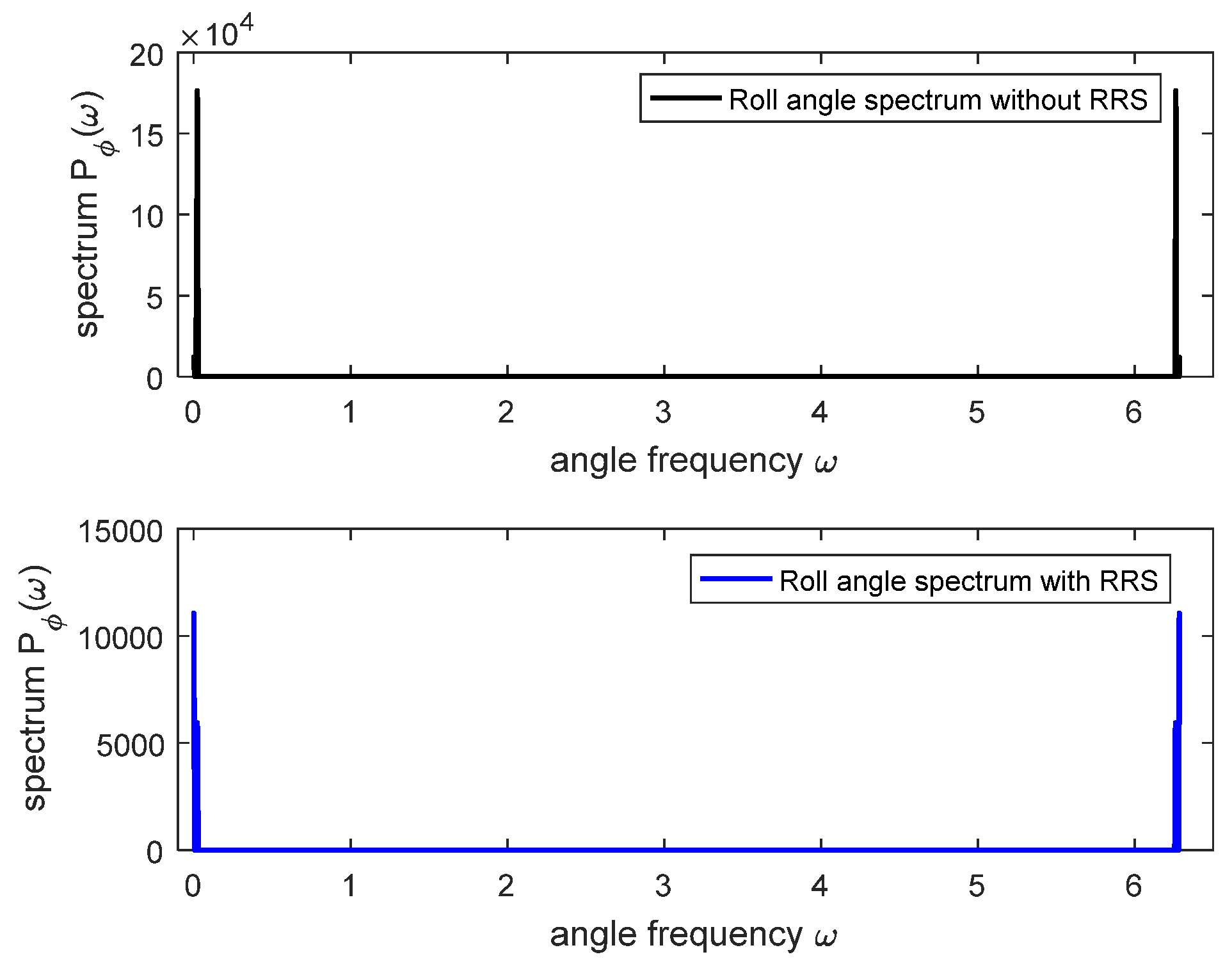
The power spectrum of the roll angle with and without RRS is presented in
Figure 10. It can be seen that the amplitude without RRS is much larger than that with RRS, which validates the effectiveness of the RRS control.
Figure 11 shows the rudder commands in the slow path-following subsystem and the fast roll reduction subsystem. The rudder commands are of great importance in the time-scale analysis, because enough large input bandwidth separation gaps should be kept to guarantee the control performances of different subsystems. The upper subfigure of
Figure 11 presents the rudder command in the roll reduction subsystem. It can be seen that a rudder input of a much higher frequency is needed in the roll reduction control. The lower subfigure of
Figure 11 shows the rudder command in the path-following subsystem. Except for the chattering at the initial time, the rudder input is of low frequency and shows a smooth and mild change. At the turning point C, which has the maximum curvature on the path, there is a relatively large rudder command to give a sudden turning motion of the ship. It shows that there is a large enough bandwidth separation gap to guarantee that the control performance of a subsystem is not interfered with by the control input in the other subsystem. It should be noted that some rudder commands are beyond the rudder saturation and rate limits, and these commands are filtered out by the control law. Fortunately, most of the rudder commands are within the limits, which guarantees the effectiveness of the control input.
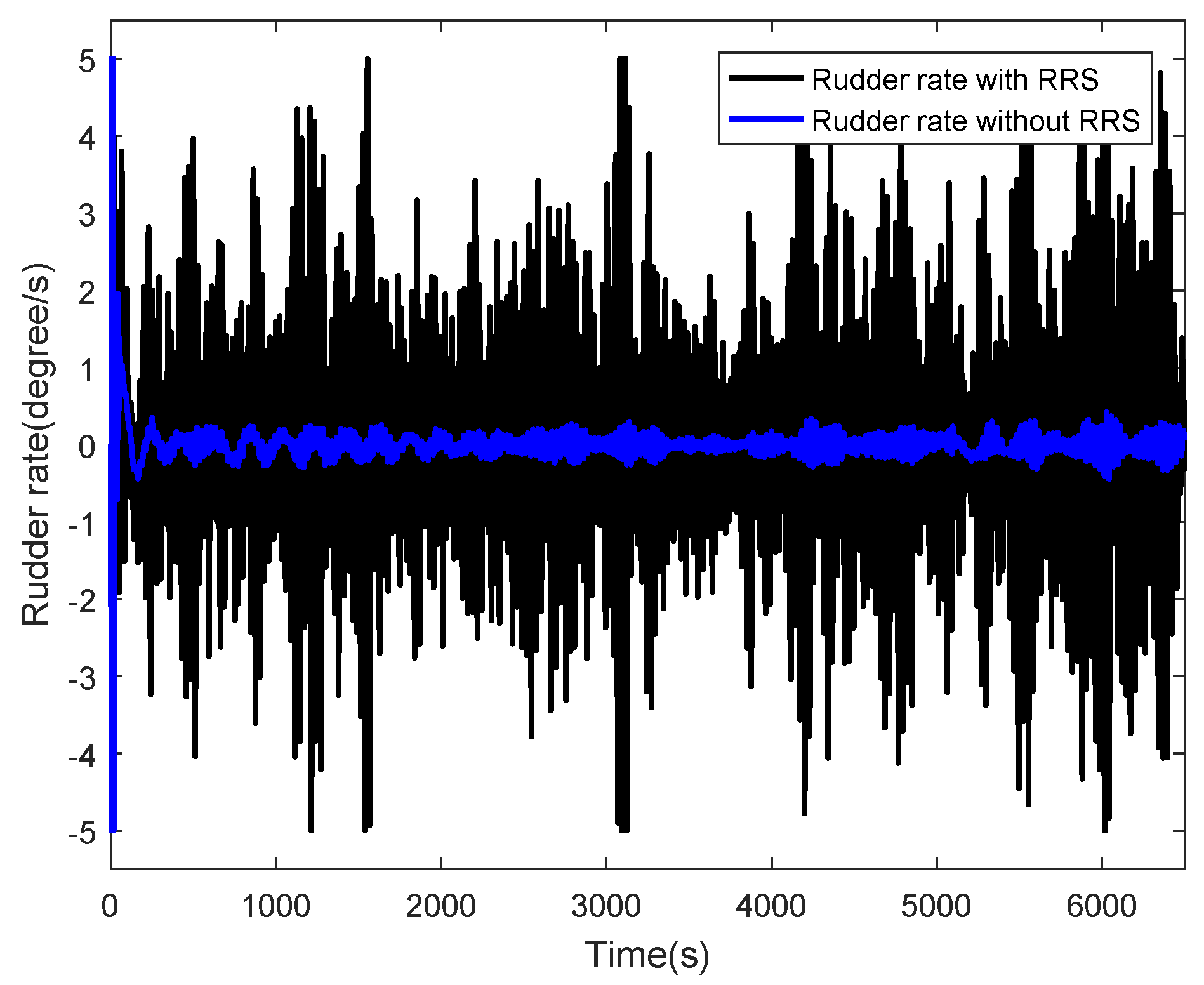
Figure 12 shows the rudder rates with and without RRS. It can be seen that the amplitude of the rudder rate with RRS is much larger than that without RRS, indicating that the good performance in roll reduction is at the expense of rapid steering.
To demonstrate whether the RRS control in the fast subsystem affects the path-following performance, a comparison of the path-following performances with and without the RRS control is conducted. The results are presented in
Figure 13, where the black solid line is the performance with RRS control and the red dashed line is the performance without RRS control. It can be seen that they almost overlap with each other, indicating that the RRS control has very little influence on the path-following performance.
Figure 14 demonstrates the influence of the
adaptive control strategy on the roll reduction performance. It shows that the roll reduction performance is apparently affected by the
adaptive control. The roll angles are a little smaller when the adaptive control is ON, and the performance curve without adaptive control is more periodic than that with adaptive control. This is mainly due to the fact that the control performances of the slow path-following subsystem in these two cases are very different. Without the
adaptive control, there exists a periodic overshooting as shown in
Figure 4, which results in the quasi-periodic properties of the roll motion as shown in the upper subfigure of
Figure 14. While in the case with the
adaptive control, the path-following performance is more stable and milder, and thus has a very limited interference to the roll reduction subsystem. It shows that the path-following performance may greatly affect the roll reduction performance. Thus, it is desirable to pay more attention to the control design of the slow path-following subsystem. Fortunately, the
adaptive control can help to reduce the roll motion to some extent.
5. Conclusions
In this paper, the time-scale decomposition techniques based on the singular perturbation method are used to separate the 4-DoF ship motion system into two subsystems of different time scales: the slow path-following subsystem and the fast roll reduction subsystem. The path-following performance and the rudder roll stabilization (RRS) performance are the two control objectives, with the former as the primary control objective and the latter as the secondary one. The control laws for the two subsystems are designed separately, with the coupling effects between the subsystems being taken into account. To guarantee a large enough input bandwidth separation gap, the adaptive control is adopted in the path-following subsystem to give a robust, stable and adaptive control performance. A PD controller is used in the roll reduction subsystem.
A widely used nonlinear 4-DoF maneuvering motion model of a container ship is adopted for the simulation study. The results show that in the slow subsystem, the path-following performance is much better when the adaptive control is in use. The adaptive parameter can successfully capture the system uncertainty and provide a fast adaption speed. Most importantly, the adaptive control strategy gives a low-frequency control input in the path-following subsystem under the wave disturbances, thus guarantees the input bandwidth separation. In the fast subsystem, the Roll Reduction Rate (RRR) can reach about 70%. The mutual interference effects of the two subsystems are also evaluated. It shows that the RRS control has very little interference in the path-following control. On the other hand, the adaptive control has some positive influence on the roll reduction performance.
However, it should be noted that in the present study, the effects of the heave and pitch motions in the vertical plane are neglected in the analysis and control law design. In reality, a ship sailing in waves will definitely have 6-DoF oscillating motions including heave and pitch motions. Although the present study focuses on the control problem of path-following in the horizontal plane with roll reduction at the same time, for a more practical application, it is desirable to clarify in a further study the extent to which the control performances are affected by the heave and pitch motions by using a 6-DoF maneuvering motion model for simulation study.
Moreover, the RRS control may face the issue of the overuse of steering gear if the proposed control strategy is implemented on a real ship, and the rudder rate is relatively much larger than that in the traditional course-keeping problem, which will cause the rudder to be more vulnerable to damage. Therefore, it should be used only in some emergency situations, such as when the ship encounters severe wave disturbances which may cause dangerous roll motions. In the future, a study on the factor of steering gear and the stability analysis should be conducted to create a better tradeoff between the roll reduction and operation of the steering gear when using the RRS control strategy.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}