
An Agent-Based Ship Firefighting Model




Abstract
:1. Introduction
2. Ship Fire Protection
3. Multi-Agent Systems and Agent-Based Modeling and Simulation
4. Ship Firefighting Model Based on Agents
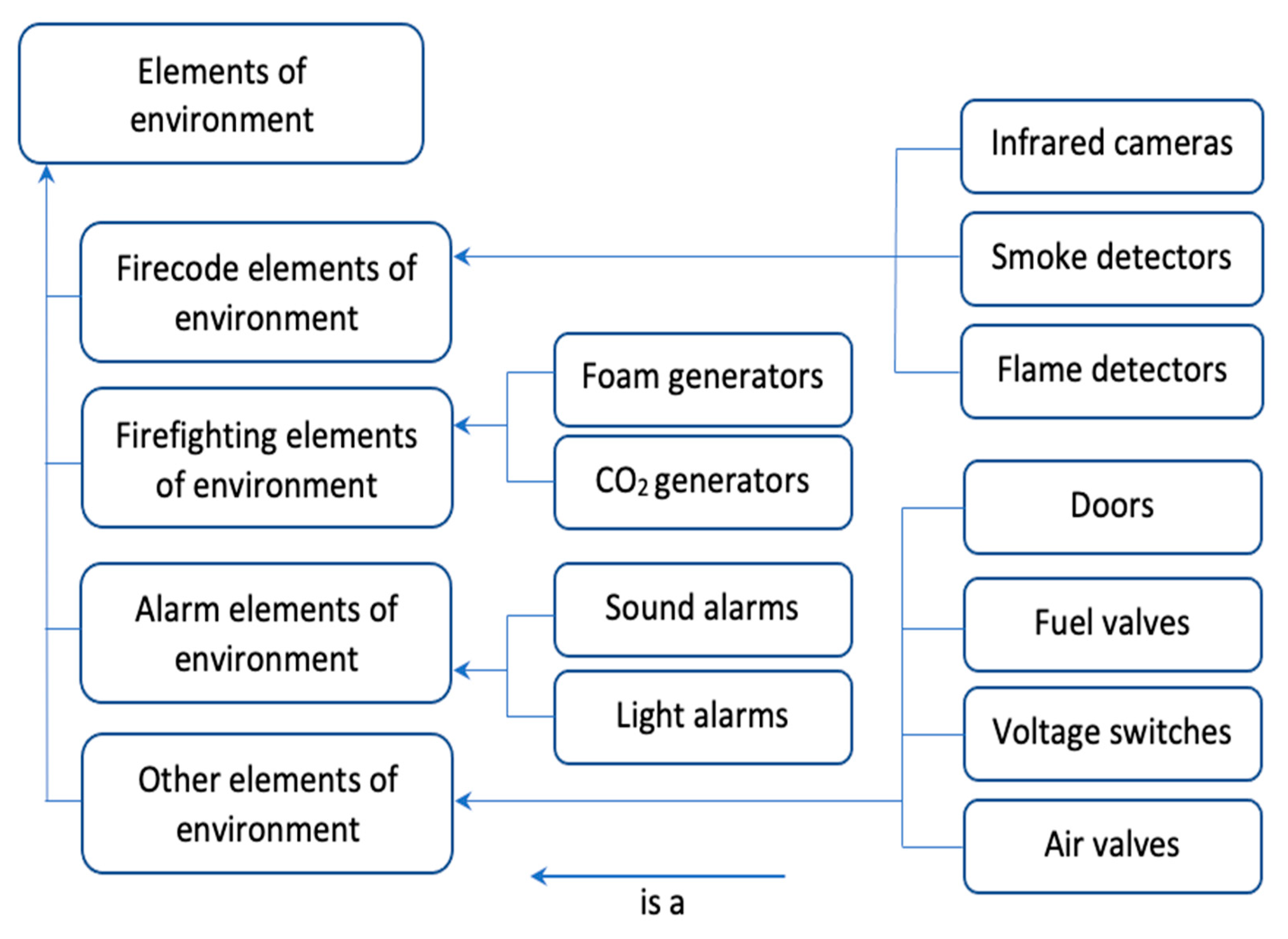
- (i)
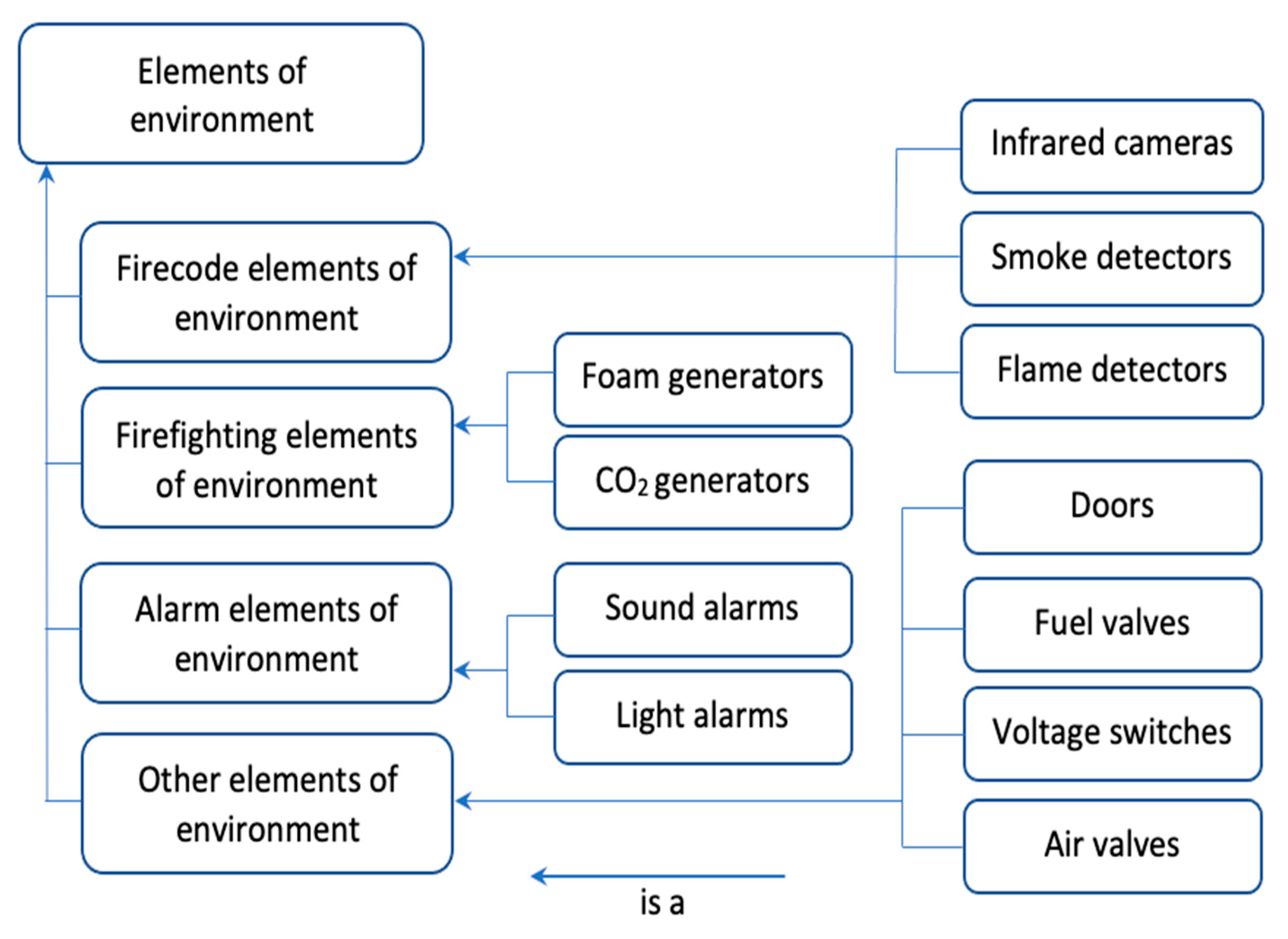
- Ship elements that are relevant to fire detection and fire extinguishing, such as infrared cameras, smoke detectors, and foam generators. In the formal definition of ontology, these elements will be called categories and marked denoted using the letter K.
- (ii)
- Relationships between ship elements relevant for fire detection and fire extinguishing. In the formal definition of ontology, these elements will be called relations and denoted using the letter R.
- (iii)
- Properties of ship elements relevant for fire detection and fire extinguishing. In the formal definition of ontology, these elements will be called the categories’ properties and denoted using the letter P.
if smoke_detector.detection_state = “smoke in the room” then{if (ir_camera.fire_detection_state = “fire in space” orir_camera.fire_detection_state = “raised level of caution”)then {sound_alarm.activity = “active”light_alarm.activity = “active”…}
5. Implementation of the Model in an Agent Simulation Environment
- (i)
- the platform must enable the use of a programming language for both the environment and agents;
- (ii)
- the platform must enable the implementation of sufficiently complex models in order to implement the proposed model;
- (iii)
- the platform must enable the extraction of internal data of the states of agents during the performance of their tasks—this condition is mandatory due to the subsequent analysis of the data to be obtained by the simulation.
- (i)
- the platform must enable as rapid development as possible without affecting the quality of the built system;
- (ii)
- the platform must be well documented;
- (iii)
- the platform must be demonstrated to be used in independent research and outside the institution where it is developed;
- (iv)
- the platform must be adapted to current versions of operating systems (the last version of the platform must not be older than two years).
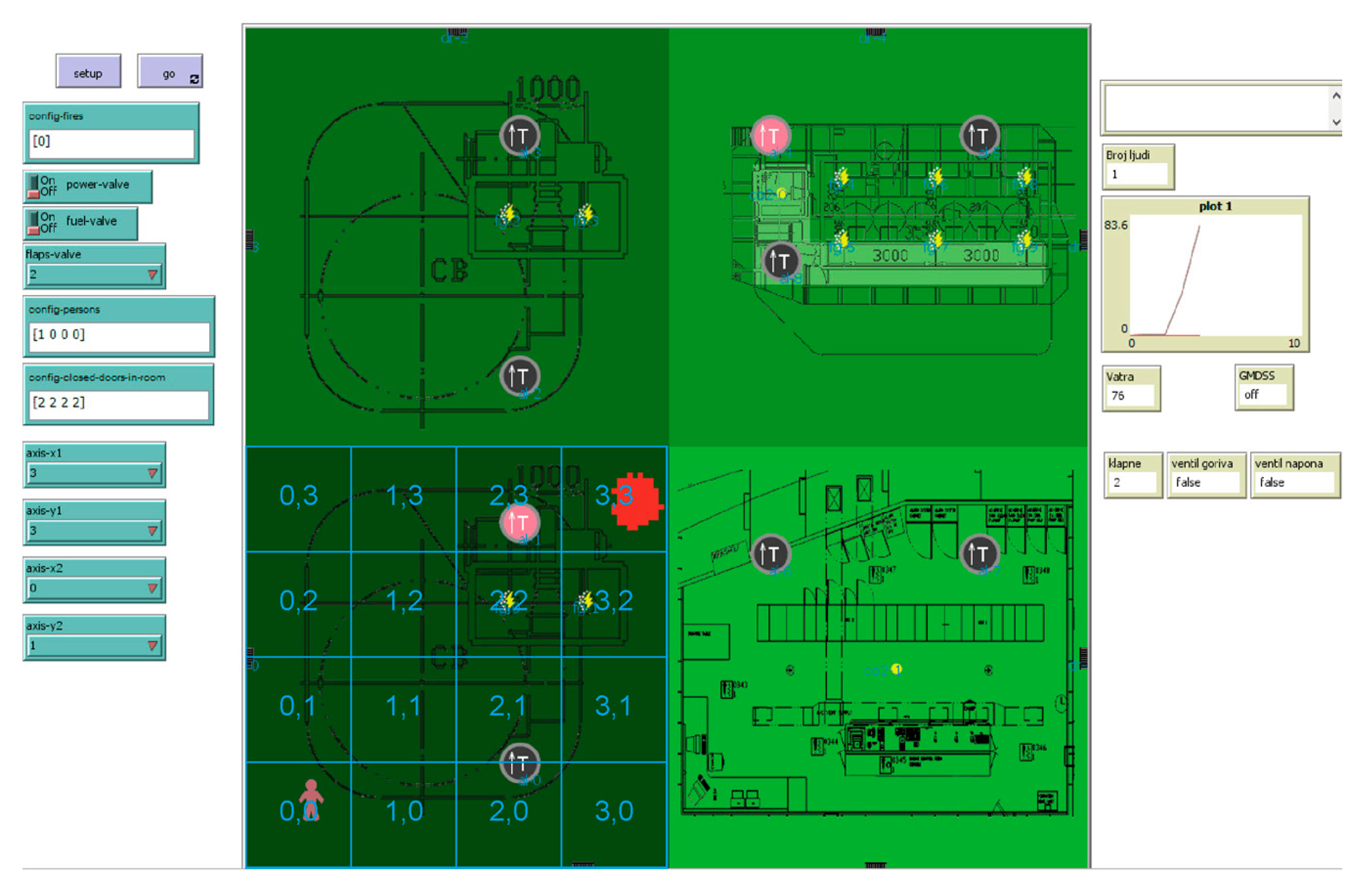
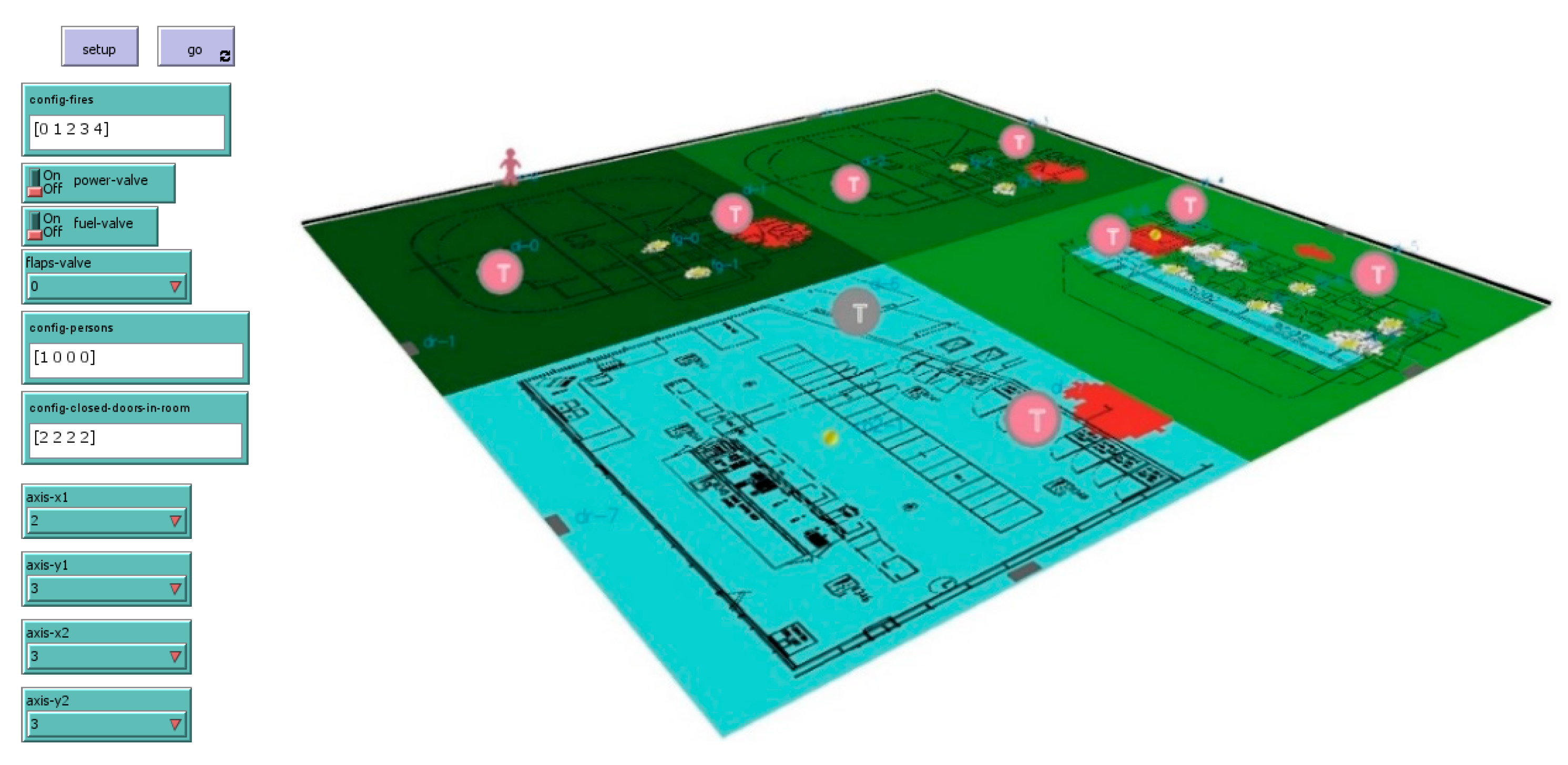
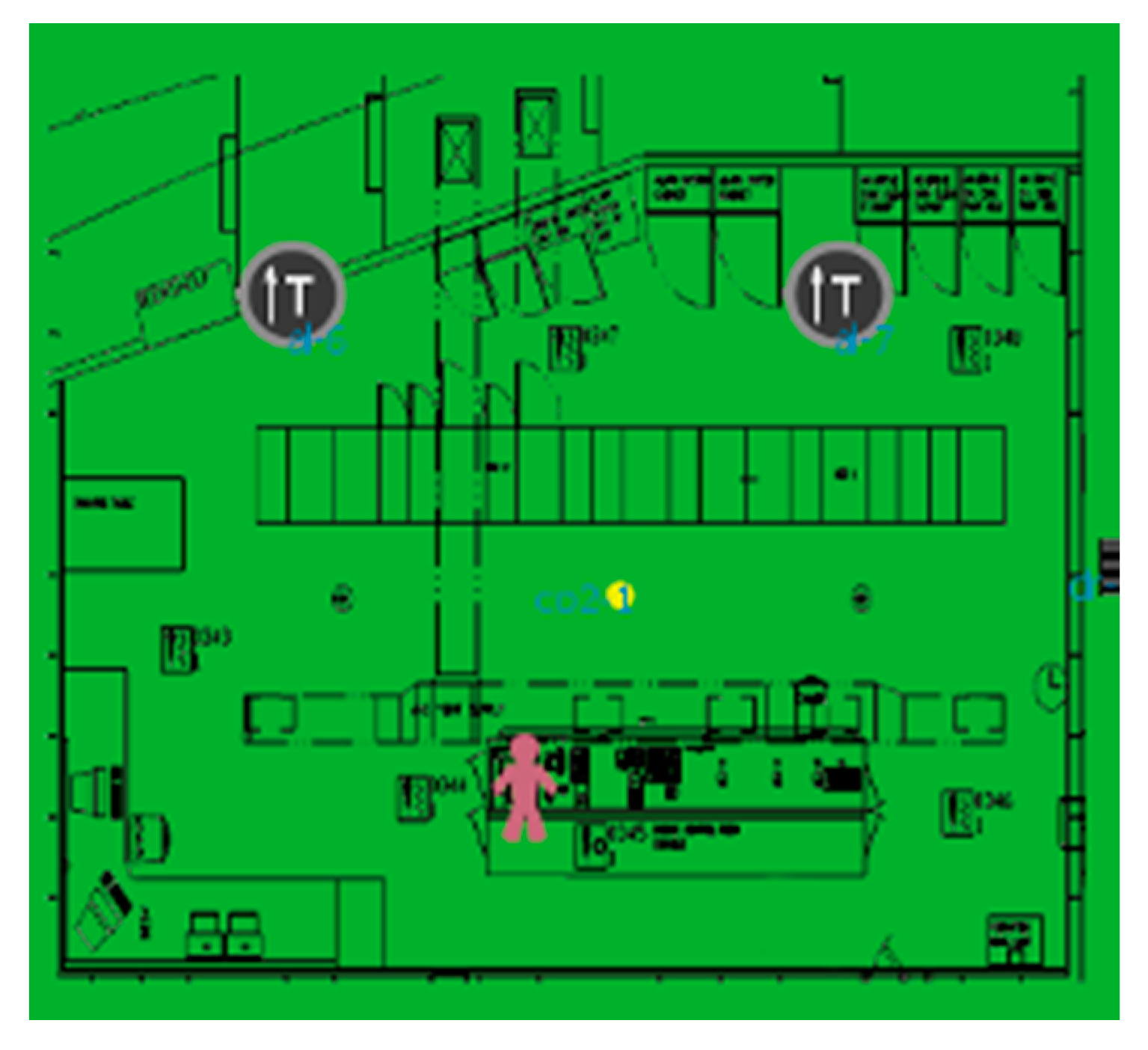
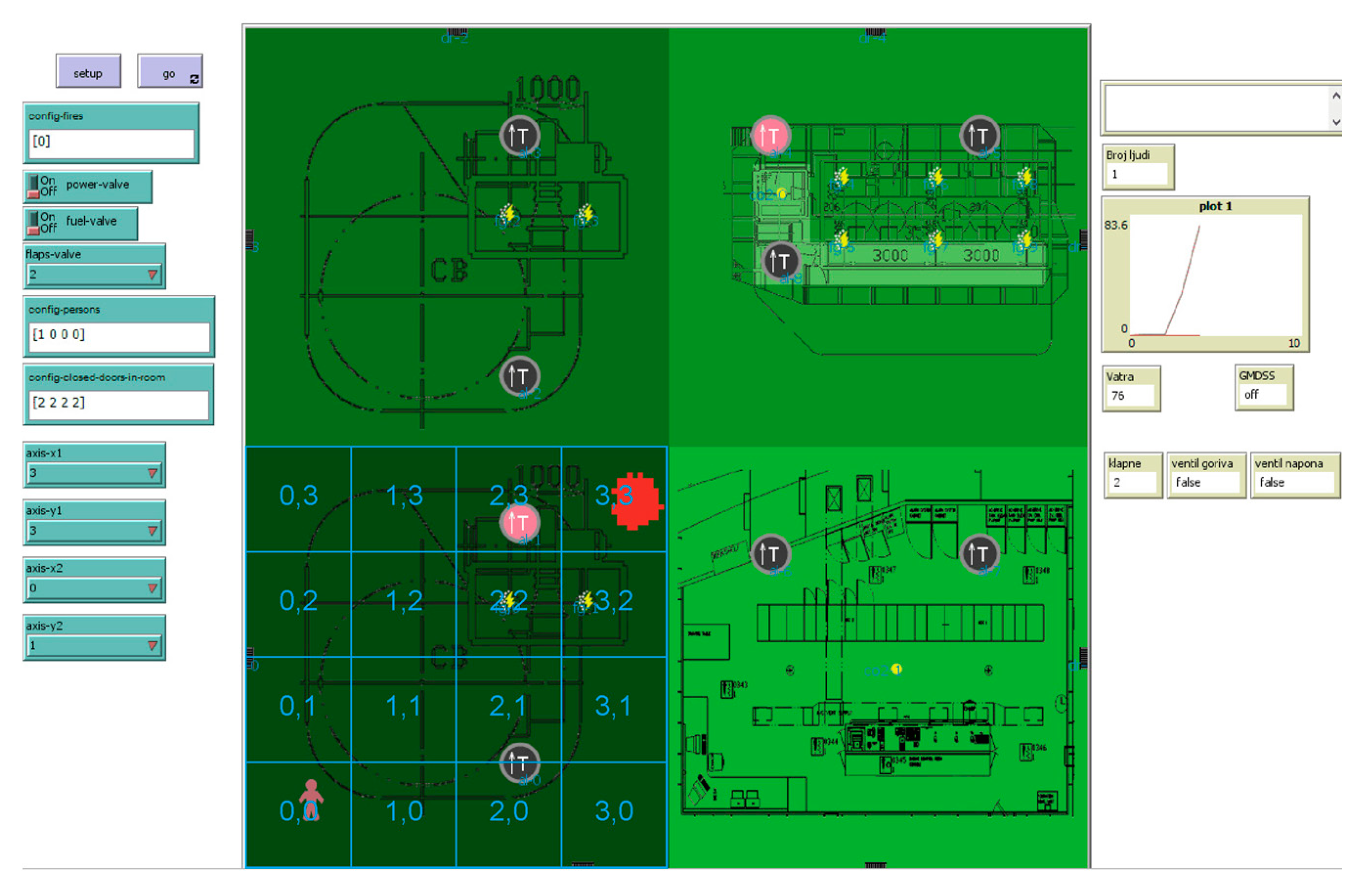
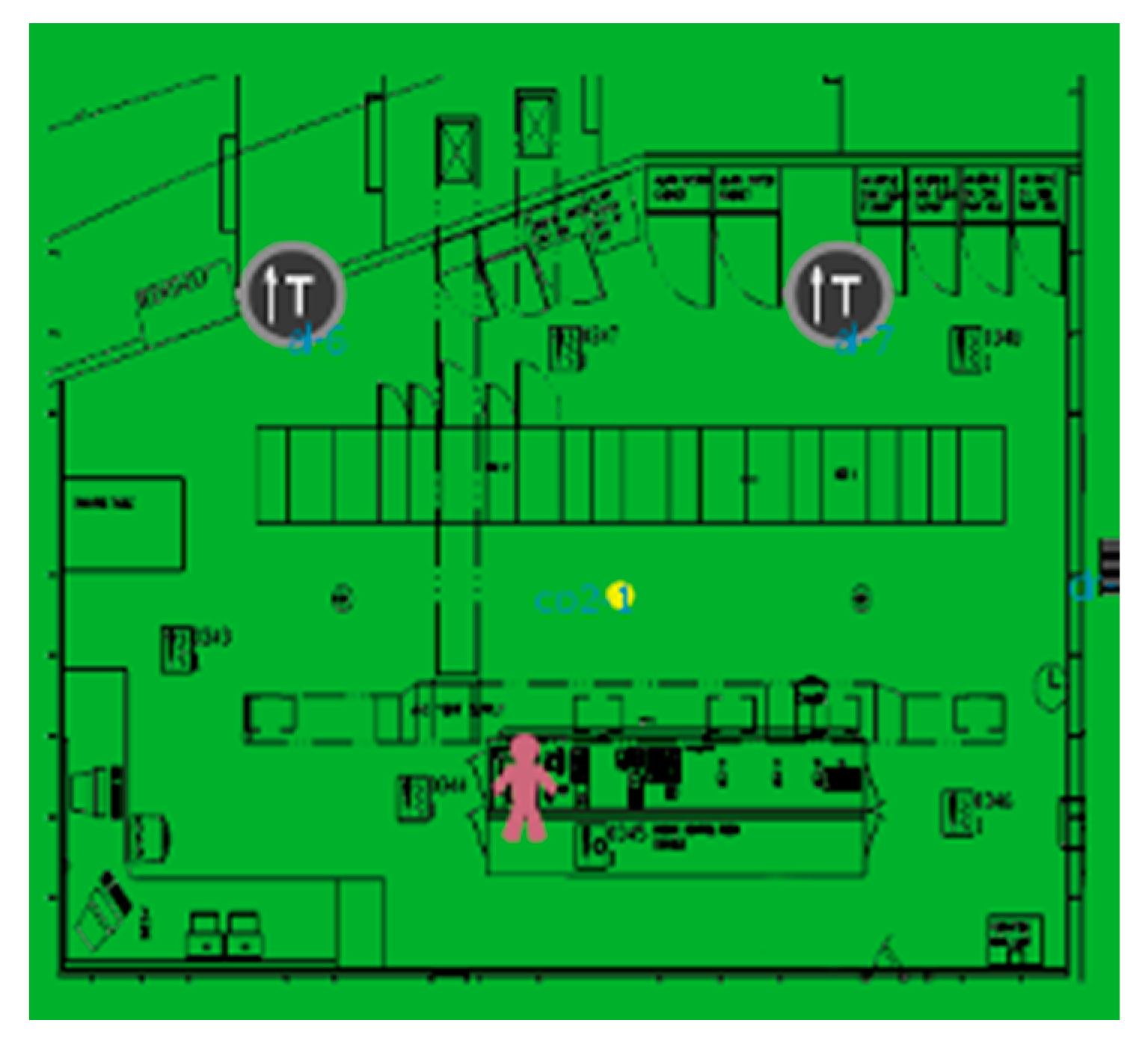
- (i)
- a ground plan of any real ship environment;
- (ii)
- various firefighting elements and their states and positioning within the ship’ environment;
- (iii)
- simulation of one or more simultaneous fires occurring in any part of the ship’s environment;
- (iv)
- simulation of fire detection and extinguishing using a developed agent ship firefighting model.
6. Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- International Maritime Organization. SOLAS, Consolidated Edition 2014: Consolidated Text of the International Convention for the Safety of Life at Sea, 1974, and Its Protocol of 1988: Articles, Annexes and Certificates; International Maritime Organization: London, UK, 2014.
- CRS. Rules for the Classification of Ships Part 17—Fire Protection; CRS Press: Boca Raton, FL, USA, 2020; pp. 1–167. [Google Scholar]
- International Maritime Organization. FSS Code: International Code for Fire Safety Systems: Resolution MSC.98(73); International Maritime Organization: London, UK, 2015; ISBN 978-92-801-1601-4 (9789280116014).
- Celik, M.; Cebi, S. Analytical HFACS for investigating human errors in shipping accidents. Accid. Anal. Prev. 2009, 41, 66–75. [Google Scholar] [CrossRef]
- STCW: Including 2010 Manila Amendments: STCW Convention and STCW Code: International Convention on Standards of Training, Certification and Watchkeeping for Seafarers, 3rd Consolidated ed.; International Maritime Organization: London, UK, 2011.
- Hanzu-Pazara, R.; Barsan, E.; Arsenie, P.; Chiotoroiu, L.; Raicu, G. Reducing of maritime accidents caused by human factors using simulators in training process. J. Marit. Res. 2008, 15, 3–18. [Google Scholar]
- Islam, R.; Anantharaman, M.; Khan, F.; Abbassi, R.; Garaniya, V. A hybrid human reliability assessment technique for the maintenance operations of marine and offshore systems. Process Saf. Prog. 2020, 39, e12118. [Google Scholar] [CrossRef] [Green Version]
- Sumić, D. Agent Based Decision-Making Model of on-Board Distress Situation (in Croatian). Ph.D. Thesis, University of Zagreb, Zagreb, Croatia, 2021. [Google Scholar]
- Ji, J.; Ma, Z.H.; He, J.J.; Xu, Y.J.; Liu, Z.Q. Research on Risk Evaluation and Dynamic Escape Path Planning Algorithm Based on Real-Time Spread of Ship Comprehensive Fire. J. Mar. Sci. Eng. 2020, 8, 602. [Google Scholar] [CrossRef]
- Novozhilov, V. Fire Hazards of Some Modern Solid Fuels. Energies 2017, 10, 113. [Google Scholar] [CrossRef] [Green Version]
- Kim, T.-E.; Mallam, S. A Delphi-AHP study on STCW leadership competence in the age of autonomous maritime operations. WMU J. Marit. Aff. 2020, 19, 163–181. [Google Scholar] [CrossRef]
- Wesche, J.S.; Sonderegger, A. When computers take the lead: The automation of leadership. Comput. Hum. Behav. 2019, 101, 197–209. [Google Scholar] [CrossRef]
- Wang, Q.; Mao, B.; Stoliarov, S.I.; Sun, J. A review of lithium ion battery failure mechanisms and fire prevention strategies. Prog. Energy Combust. Sci. 2019, 73, 95–131. [Google Scholar] [CrossRef]
- Wooldridge, M.J. An Introduction to Multiagent Systems; John Wiley & Sons Ltd: New York, NY, USA, 2002; p. 348. [Google Scholar]
- Ferber, J. Multi-Agent Systems: An Introduction to Distributed Artificial Intelligence; Addison-Wesley: Harlow, UK, 1999; p. 509. [Google Scholar]
- Uhrmacher, A.M.; Weyns, D. Multi-Agent Systems: Simulation and Applications; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Macal, C.M. Everything you need to know about agent-based modelling and simulation. J. Simul. 2016, 10, 144–156. [Google Scholar] [CrossRef]
- Bonabeau, E. Agent-based modeling: Methods and techniques for simulating human systems. Proc. Natl. Acad. Sci. USA 2002, 99, 7280–7287. [Google Scholar] [CrossRef] [Green Version]
- Abar, S.; Theodoropoulos, G.K.; Lemarinier, P.; O’Hare, G.M.P. Agent Based Modelling and Simulation tools: A review of the state-of-art software. Comput. Sci. Rev. 2017, 24, 13–33. [Google Scholar] [CrossRef]
- Moon, Y.B. Simulation modelling for sustainability: A review of the literature. Int. J. Sustain. Eng. 2017, 10, 2–19. [Google Scholar] [CrossRef]
- Squazzoni, F. The Impact Of Agent-Based Models In The Social Sciences After 15 Years Of Incursions. Hist. Econ. Ideas 2010, 18, 197–233. [Google Scholar]
- do Nascimento, N.M.; de Lucena, C.J.P. FIoT: An agent-based framework for self-adaptive and self-organizing applications based on the Internet of Things. Inf. Sci. 2017, 378, 161–176. [Google Scholar] [CrossRef]
- Crooks, A.T.; Heppenstall, A.J. Introduction to agent-based modelling. In Agent-Based Models of Geographical Systems; Springer: New York, NY, USA, 2012; pp. 85–105. [Google Scholar]
- Hackl, J.; Dubernet, T. Epidemic Spreading in Urban Areas Using Agent-Based Transportation Models. Future Internet 2019, 11, 92. [Google Scholar] [CrossRef] [Green Version]
- Kabiri Chimeh, M.; Heywood, P.; Pennisi, M.; Pappalardo, F.; Richmond, P. Parallelisation strategies for agent based simulation of immune systems. BMC Bioinform. 2019, 20, 579. [Google Scholar] [CrossRef] [PubMed]
- Schulze, J.; Muller, B.; Groeneveld, J.; Grimm, V. Agent-Based Modelling of Social-Ecological Systems: Achievements, Challenges, and a Way Forward. J. Artif. Soc. Soc. Simul. 2017, 20, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Huber, L.; Rudisser, J.; Meisch, C.; Stotten, R.; Leitinger, G.; Tappeiner, U. Agent-based modelling of water balance in a social-ecological system: A multidisciplinary approach for mountain catchments. Sci. Total Environ. 2021, 755, 142962. [Google Scholar] [CrossRef] [PubMed]
- El Fazziki, A.; Benslimane, D.; Sadiq, A.; Ouarzazi, J.; Sadgal, M. An Agent Based Traffic Regulation System for the Roadside Air Quality Control. IEEE Access 2017, 5, 13192–13201. [Google Scholar] [CrossRef]
- Bernhardt, K. Agent-based modeling in transportation. Artif. Intell. Transp. 2007, 72, 72–80. [Google Scholar]
- Bazzan, A.L.C.; Klugl, F. A review on agent-based technology for traffic and transportation. Knowl. Eng. Rev. 2014, 29, 375–403. [Google Scholar] [CrossRef]
- Abdulsattar, H.; Siam, M.R.K.; Wang, H.Z. Characterisation of the impacts of autonomous driving on highway capacity in a mixed traffic environment: An agent-based approach. IET Intell. Transp. Syst. 2020, 14, 1132–1141. [Google Scholar] [CrossRef]
- Rodrigues, N.; Oliveira, E.; Leitao, P. Decentralized and on-the-fly agent-based service reconfiguration in manufacturing systems. Comput. Ind. 2018, 101, 81–90. [Google Scholar] [CrossRef] [Green Version]
- Tang, H.; Li, D.; Wang, S.; Dong, Z. CASOA: An architecture for agent-based manufacturing system in the context of industry 4.0. IEEE Access 2017, 6, 12746–12754. [Google Scholar] [CrossRef]
- Wagner, N.; Agrawal, V. An agent-based simulation system for concert venue crowd evacuation modeling in the presence of a fire disaster. Expert Syst. Appl. 2014, 41, 2807–2815. [Google Scholar] [CrossRef]
- Zarboutis, N.; Marmaras, N. Design of formative evacuation plans using agent-based simulation. Saf. Sci. 2007, 45, 920–940. [Google Scholar] [CrossRef]
- Abdelghany, A.; Abdelghany, K.; Mahmassani, H.; Alhalabi, W. Modeling framework for optimal evacuation of large-scale crowded pedestrian facilities. Eur. J. Oper. Res. 2014, 237, 1105–1118. [Google Scholar] [CrossRef]
- Chen, L. Agent-based modeling in urban and architectural research: A brief literature review. Front. Archit. Res. 2012, 1, 166–177. [Google Scholar] [CrossRef] [Green Version]
- De la Prieta, F.; Rodriguez-Gonzalez, S.; Chamoso, P.; Corchado, J.M.; Bajo, J. Survey of agent-based cloud computing applications. Future Gener. Comp. Syst. 2019, 100, 223–236. [Google Scholar] [CrossRef]
- Lieder, M.; Asif, F.M.A.; Rashid, A. Towards Circular Economy implementation: An agent-based simulation approach for business model changes. Auton. Agents Multi-Agent Syst. 2017, 31, 1377–1402. [Google Scholar] [CrossRef] [Green Version]
- Fagiolo, G.; Guerini, M.; Lamperti, F.; Moneta, A.; Roventini, A. Validation of agent-based models in economics and finance. In Computer Simulation Validation; Springer: Cham, Switzerland, 2019; pp. 763–787. [Google Scholar]
- Gomez-Cruz, N.A.; Saa, I.L.; Hurtado, F.F.O. Agent-based simulation in management and organizational studies: A survey. Eur. J. Manag. Bus. Econ. 2017, 26, 313–328. [Google Scholar] [CrossRef] [Green Version]
- Vinogradov, E.; Leick, B.; Kivedal, B.K. An agent-based modelling approach to housing market regulations and Airbnb-induced tourism. Tour. Manag. 2020, 77, 104004. [Google Scholar] [CrossRef]
- Nicholls, S.; Amelung, B.; Student, J. Agent-based modeling: A powerful tool for tourism researchers. J. Travel Res. 2017, 56, 3–15. [Google Scholar] [CrossRef]
- Qiu, L.; Phang, R. Agent-based modeling in political decision making. In Oxford Research Encyclopedia of Politics; Oxford University Press: New York, NY, USA, 2020. [Google Scholar]
- Hughes, H.P.N.; Clegg, C.W.; Robinson, M.A.; Crowder, R.M. Agent-based modelling and simulation: The potential contribution to organizational psychology. J. Occup. Organ. Psychol. 2012, 85, 487–502. [Google Scholar] [CrossRef]
- Eberlen, J.; Scholz, G.; Gagliolo, M. Simulate this! An Introduction to Agent-Based Models and their Power to Improve your Research Practice. Int. Rev. Soc. Psychol. 2017, 30, 149–160. [Google Scholar] [CrossRef] [Green Version]
- Rakic, K.; Rosic, M.; Boljat, I. A Survey of Agent-Based Modelling and Simulation Tools for Educational Purpose. Teh. Vjesn. 2020, 27, 1014–1020. [Google Scholar] [CrossRef]
- Kravari, K.; Bassiliades, N. A Survey of Agent Platforms. J. Artif. Soc. Soc. Simul. 2015, 18, 11. [Google Scholar] [CrossRef]
- Rob, A. A Survey of Agent Based Modelling and Simulation Tools; Technical Report DL-TR-2010-07, Science and Technology Facilities Council; STFC Daresbury Laboratory: Daresbury, UK; Warrington, UK, 2010. [Google Scholar]
- Nikolai, C.; Madey, G. Tools of the Trade: A Survey of Various Agent Based Modeling Platforms. J. Artif. Soc. Soc. Simul. 2009, 12, 2. [Google Scholar]
- Railsback, S.F.; Lytinen, S.L.; Jackson, S.K. Agent-based simulation platforms: Review and development recommendations. Simul. Trans. Soc. Modeling Simul. Int. 2006, 82, 609–623. [Google Scholar] [CrossRef]
- Bordini, R.H.; Dastani, M.; Winikoff, M. Current Issues in Multi-Agent Systems Development. In Proceedings of the 7th International Workshop, Engineering Societies in the Agents World (ESAW) 2006, Dublin, Ireland, 6–8 September 2006; Springer: Berlin/Heidelberg, Germany, 2007; pp. 38–61. [Google Scholar]
- Wilensky, U.; Rand, W. An Introduction to Agent-Based Modeling: Modeling Natural, Social, and Engineered Complex Systems with NetLogo; MIT Press: Cambridge, MA, USA, 2015. [Google Scholar]
- Jaxa-Rozen, M.; Kwakkel, J.H.; Bloemendal, M. A coupled simulation architecture for agent-based/geohydrological modelling with NetLogo and MODFLOW. Environ. Modell. Softw. 2019, 115, 19–37. [Google Scholar] [CrossRef]
- Flores-Parra, J.M.; Castanon-Puga, M.; Gaxiola-Pacheco, C.; Palafox-Maestre, L.E.; Rosales, R.; Tirado-Ramos, A. A Fuzzy Inference System and Data Mining Toolkit for Agent-Based Simulation in NetLogo. Stud. Syst. Decis. Cont. 2018, 143, 127–149. [Google Scholar] [CrossRef]
- Gruber, T.R. Ontolingua: A Mechanism to Support Portable Ontologies; Knowledge Systems Laboratory, Stanford University: Stanford, CA, USA, 1992. [Google Scholar]
- Gruber, T.R. Toward principles for the design of ontologies used for knowledge sharing. Int. J. Hum. Comput. Stud. 1995, 43, 907–928. [Google Scholar] [CrossRef]
- Sumić, D.; Maleš, L.; Rosić, M. Agent Based Onboard Firefighting System. Trans. Marit. Sci. 2021, 10, 101–111. [Google Scholar] [CrossRef]
- Mahulkar, V.; Mckay, S.; Adams, D.E.; Chaturvedi, A.R. System-of-Systems Modeling and Simulation of a Ship Environment With Wireless and Intelligent Maintenance Technologies. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2009, 39, 1255–1270. [Google Scholar] [CrossRef]
- Shitao, L.; Tao, J. A MAS Approach for Shipboard Firefighting Simulation. In Proceedings of the 2010 International Conference on Intelligent System Design and Engineering Application, Changsha, China, 13–14 October 2010. [Google Scholar]
- Carrillo, E.; Yeotikar, S.; Nayak, S.; Jaffar, M.K.M.; Azarm, S.; Herrmann, J.W.; Otte, M.; Xu, H. Communication-aware multi-agent metareasoning for decentralized task allocation. IEEE Access 2021, 9, 98712–98730. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Kategory Name | Property Name | Allowed Property Values |
|---|---|---|
| Ship rooms | ID | Room identification number |
| Permitted_method_of_ extinguishing | “CO2”, “foam”, “CO2 and foam” | |
| co2_quantity | Required number of CO2 units (sufficient to extinguish the room) | |
| foam_quantity | Required number of foam units (sufficient to extinguish the room) | |
| Infrared cameras | ID | Infrared camera identification number |
| location | The coordinates on which the infrared camera is located | |
| fire_detection_status | “fire in space”, “no fires in space”, “raised level of vigilance” | |
| persons_in_room | number of persons in the room | |
| Foam generators | ID | Foam generator identification number |
| Activity | “in the process of generation”, “inactive” |
| Room Type | Number of Rooms in Configuration | Elements of Environment Located in the Room * | Mode of Extinguishing |
|---|---|---|---|
| Fired boiler room | 2 | Infrared camera (1) | Foam |
| Smoke detector (1) | |||
| Flame detector (1) | |||
| Foam generator (2) | |||
| Door (2) | |||
| Fuel valve (1) | |||
| Air valve (1) | |||
| Voltage switch (1) | |||
| Main engine room | 1 | Infrared camera (1) | Foam |
| Smoke detector (1) | |||
| Flame detector (1) | |||
| Foam generator (6) | |||
| Door (2) | |||
| Fuel valve (1) | |||
| Air valve (1) | |||
| Voltage switch (1) | |||
| Engine control room | 1 | Infrared camera (1) | CO2 |
| Smoke detector (2) | |||
| CO2 generator (1) | |||
| Door (2) | |||
| Fuel valve (1) | |||
| Air valve (1) | |||
| Voltage switch (1) | |||
| Main engine scavenge air space | 1 | Infrared camera (1) | CO2 |
| CO2 generator (1) | |||
| Fuel valve (1) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sumic, D.; Males, L.; Rosic, M. An Agent-Based Ship Firefighting Model. J. Mar. Sci. Eng. 2021, 9, 902. https://doi.org/10.3390/jmse9080902
Sumic D, Males L, Rosic M. An Agent-Based Ship Firefighting Model. Journal of Marine Science and Engineering. 2021; 9(8):902. https://doi.org/10.3390/jmse9080902
Chicago/Turabian StyleSumic, Dean, Lada Males, and Marko Rosic. 2021. "An Agent-Based Ship Firefighting Model" Journal of Marine Science and Engineering 9, no. 8: 902. https://doi.org/10.3390/jmse9080902
APA StyleSumic, D., Males, L., & Rosic, M. (2021). An Agent-Based Ship Firefighting Model. Journal of Marine Science and Engineering, 9(8), 902. https://doi.org/10.3390/jmse9080902