1. Introduction
The underwater towed system has been found widely used in the collection of marine environmental parameters [
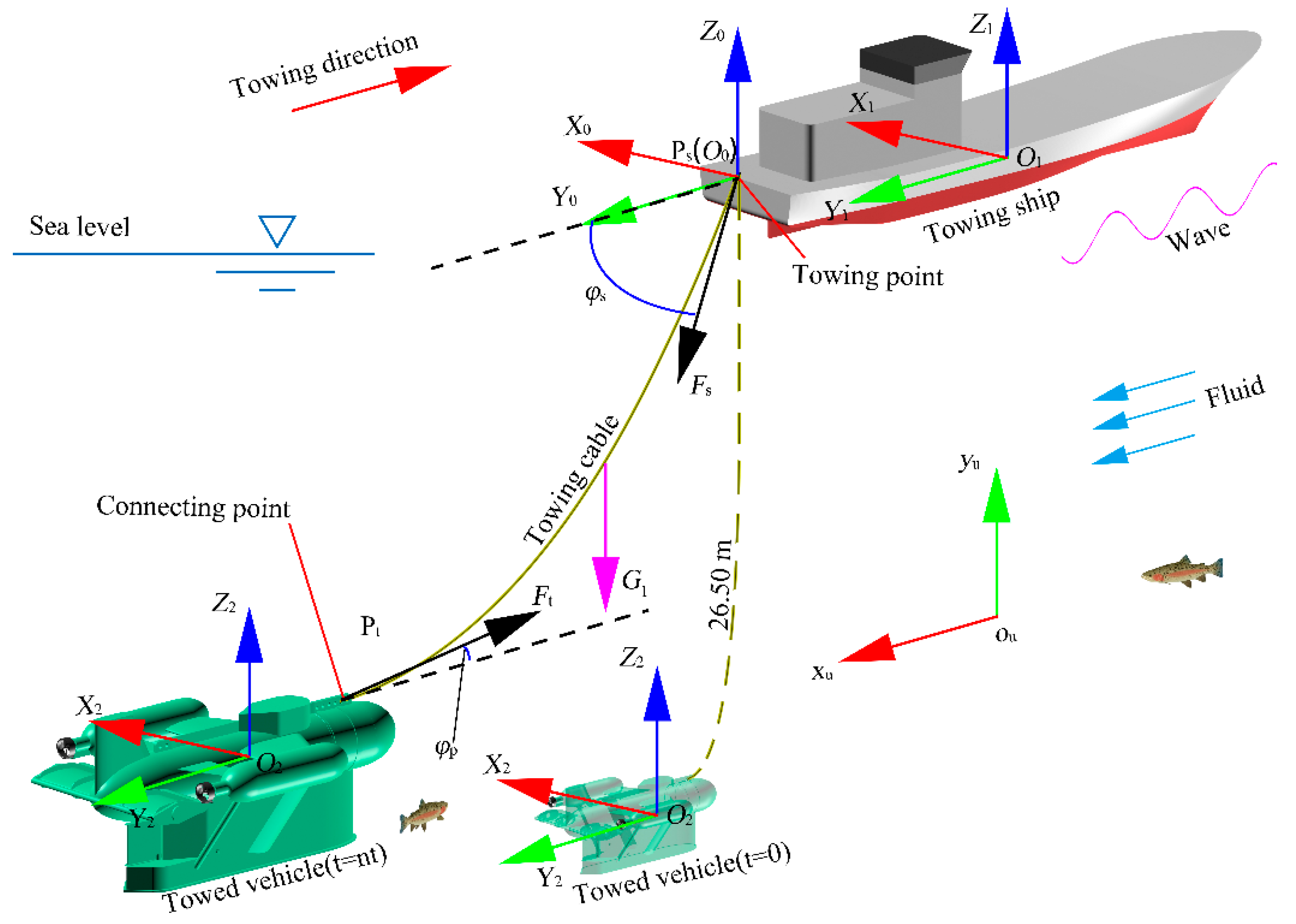
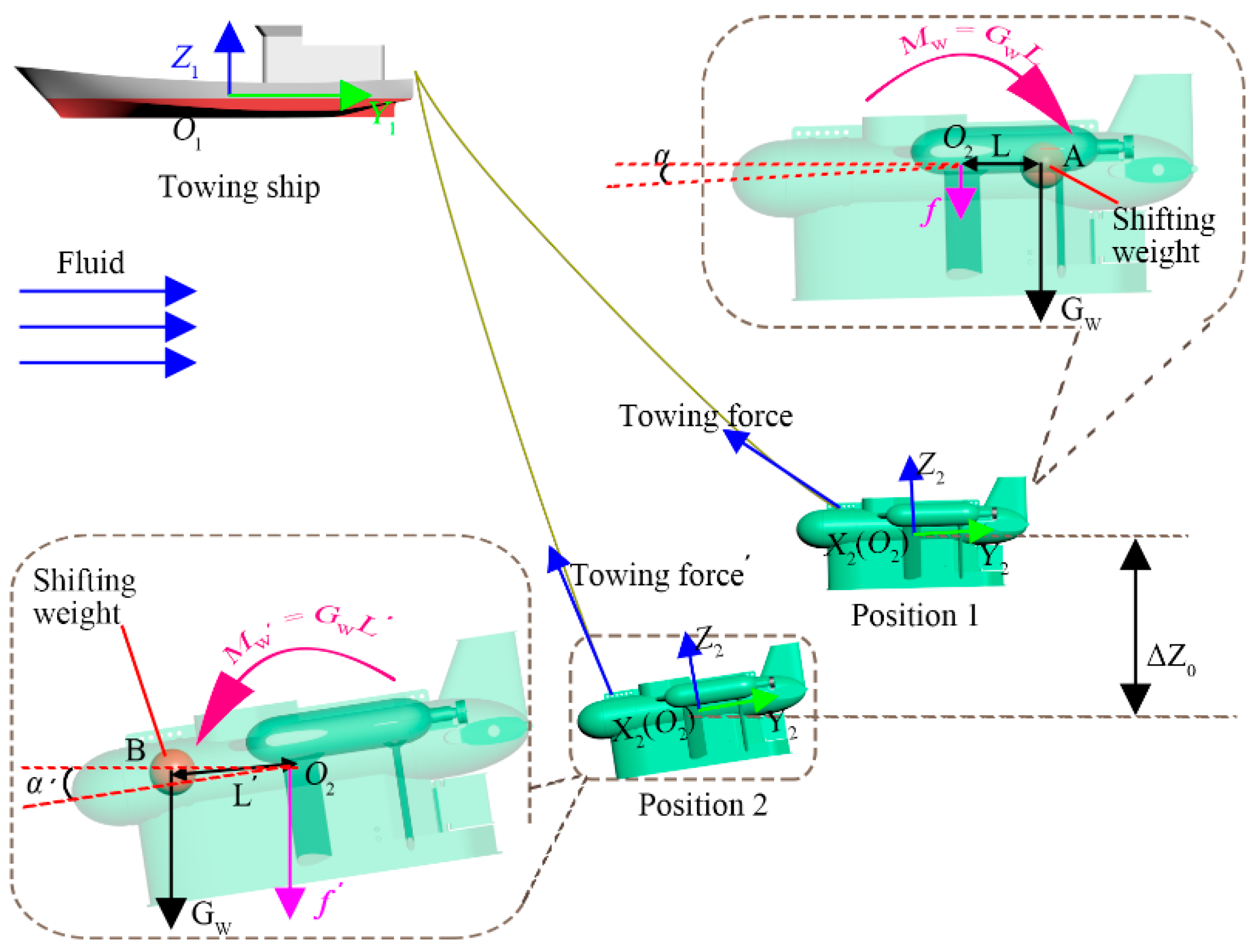
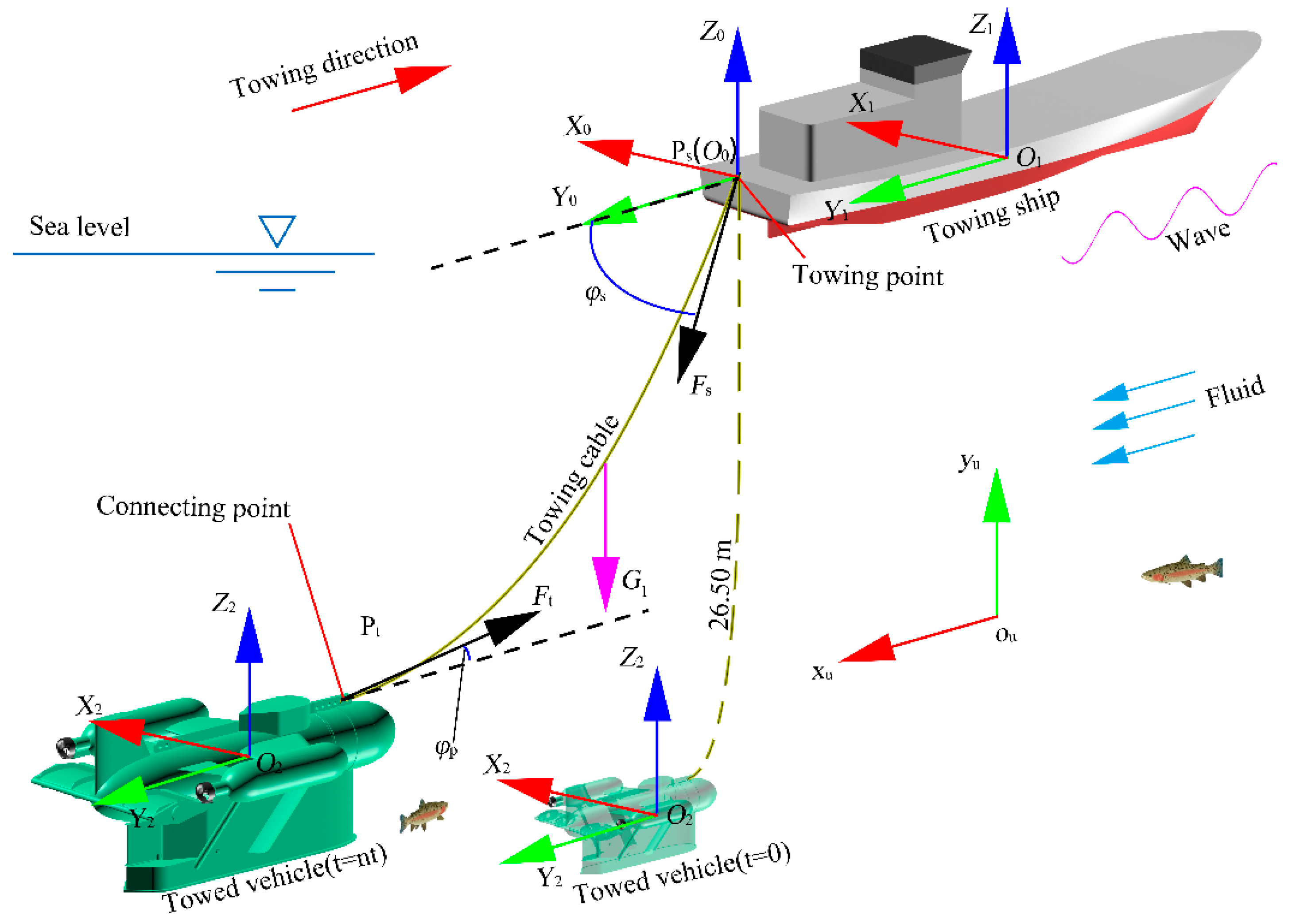
1]. A typical underwater towed system is usually composed of a towing ship, a towing cable, and a towed vehicle equipped with control mechanisms and corresponding control systems to control the trajectory or attitude of the towed vehicle. It is of practical significance to discuss the hydrodynamic and control characteristics under interference conditions in an underwater towed system’s research and development.
In studying the trajectory and attitude control performance of an underwater vehicle, many beneficial research and explorations have been conducted on the mathematical models or numerical approaches. Huy Ngoc Tran et al. [
2] developed a tracking controller for a hybrid autonomous underwater vehicle (AUV); the controller considered the effect of the roll angle and model uncertainty, numerical simulations are carried out to analyze the robust stability of the proposed controller. Jinmo Park et al. [
3] proposed a dynamics model based on an absolute nodal coordinate formulation and a 6-DOF equation; the forward running and turning behavior of an underwater towed system are discussed to validate the effectiveness of the dynamics model. Pham Nguyen Nhut Thanh et al. [
4] presented a three-dimensional trajectory tracking controller for AUV vehicles; uncertain nonlinear model features, model uncertainty, and the roll motion’s effect are considered in the trajectory tracking controller. Wu, J.M. et al. [
5] proposed an integrated hydrodynamics and control model based on the fuzzy sliding mode control (FSMC) algorithm; the umbilical cable and hydrodynamic behaviors of an underwater robot are governed by a finite difference method and the six-degrees-of-freedom equations of motion for submarine simulations, respectively. In another research, Wu, J.M. et al. [
6] introduced the hybrid feed-forward and feedback control coupling with the incremental proportional–integral–derivative algorithm into the hydrodynamic model for a tethered underwater robot system; the trajectory following control of the tethered underwater robot is investigated. Francisco Curado Teixeira et al. [
7] discussed the problem of depth tracking and attitude control of a towed vehicle whose controller is based on the nonlinear adaptive output feedback control law. Vu, M.T. et al. [
8] proposed a new model of the behavior of an underwater vehicle affected by umbilical cable dynamics; the umbilical cable in this model is described by the governing equations based on the catenary equation method, the maneuvering behaviors of the underwater vehicle with an umbilical cable effect was simulated and instructive results were obtained. Cho, H. et al. [
9], Vu, M.T. et al. [
10] and Jung, D.W. et al. [
11] investigated the control of a multi-marine vehicles system-integrated unmanned surface vehicle and underwater vehicle; the unmanned surface vehicle and the underwater vehicle are connected via an underwater cable, the performance of the system is demonstrated by an experimental method. Vu, M.T. et al. [
12] investigated a station-keeping control of an underwater vehicle; the station-keeping control algorithm based on a sliding mode control theory is proposed and demonstrated by a series of simulations and experiments. In another study by Vu, M.T. et al. [
13], the least square method and quadratic programming method were designed for the positioning controller; numerical results show that the controller using the quadratic programming method shows better performance. Much has been extensively discussed regarding the trajectory and attitude manipulation problems of different types of underwater vehicle systems, various dynamic control models or physical models have been proposed, and relevant numerical simulations or experiments have been investigated.
However, on the one hand, when it comes to trajectory and attitude control issues of underwater vehicles, most of the research usually focuses on the control topic, while relatively less attention is paid to the hydrodynamic factors considering the viscous effect. It is certain that hydrodynamics factors are indispensable in the discussions on manipulation problems of underwater vehicles. Further, there is less attention on the overall dynamics of the underwater towed system, especially considering the complex coupling among the towed vehicle, towing ship, towing cable, and the surrounding flow field under wave interference. On the other hand, the dynamic characteristics of the depth tracking operation by adjusting the center of gravity of the towed vehicle have been less explored, which hinders the understanding of the control mechanism of this control mode. Finally, few studies involve the towing ship hydrodynamic factors on the towed vehicle’s manipulation, which is non-negligible when the towing ship is small or suffering rough sea conditions.
The key to accurately predicting the hydrodynamic characteristics of a towed system under the control operation is to construct an accurate and practicable hydrodynamic model combing the towing ship, the towing cable, the towed vehicle, and the control system. For a better understanding of the depth tracking control characteristics, especially the hydrodynamic characteristics of an underwater towed system under an interference condition, the depth tracking operation of an underwater towed system in head waves is numerically simulated. The internal relationship between the depth tracking system, the control mechanism, and the vertical trajectory of the towed vehicle is analyzed. The depth tracking control model is based on the PID algorithm; the hydrodynamic behaviors of the towing ship and the towed vehicle in head waves are simulated by the computational fluid dynamics (CFD) method, the motions of the towed vehicle and the towing ship are described based on the overset mesh technique, the head waves are captured by the volume of fluid (VOF) method; the towing cable is described by the quasi-steady-state catenary equations. The dynamic characteristics of the underwater towed system under the control operation are discussed. The main contributions of this paper include the followings: firstly, a numerical model combining the control system with the CFD method based on the overset mesh technique is explored and constructed; secondly, the influence of the towing ship and head waves is introduced into the numerical analysis of the underwater towed system; thirdly, a depth control system based on the center of gravity adjustment is proposed and its control characteristics, especially its dynamic mechanisms, are discussed.
This paper is constructed as follows: Firstly,
Section 2, the computational scheme used in this paper is introduced in detail. In this section, the assumptions of this paper are given first, and then the equations describe the flow field, the governing equations of the towed system are presented. The geometric models of the towed system are described. The division and definition of computational domains are introduced. Next,
Section 3 briefly discussed the control mechanism of the depth control system. Next,
Section 4, the feasibility of the numerical method is demonstrated by experimental results. Then,
Section 5, numerical results are presented and discussed. Finally,
Section 6 summarizes this paper and gives several conclusions.
3. Model on Hydrodynamic Simulation of Depth Tracking
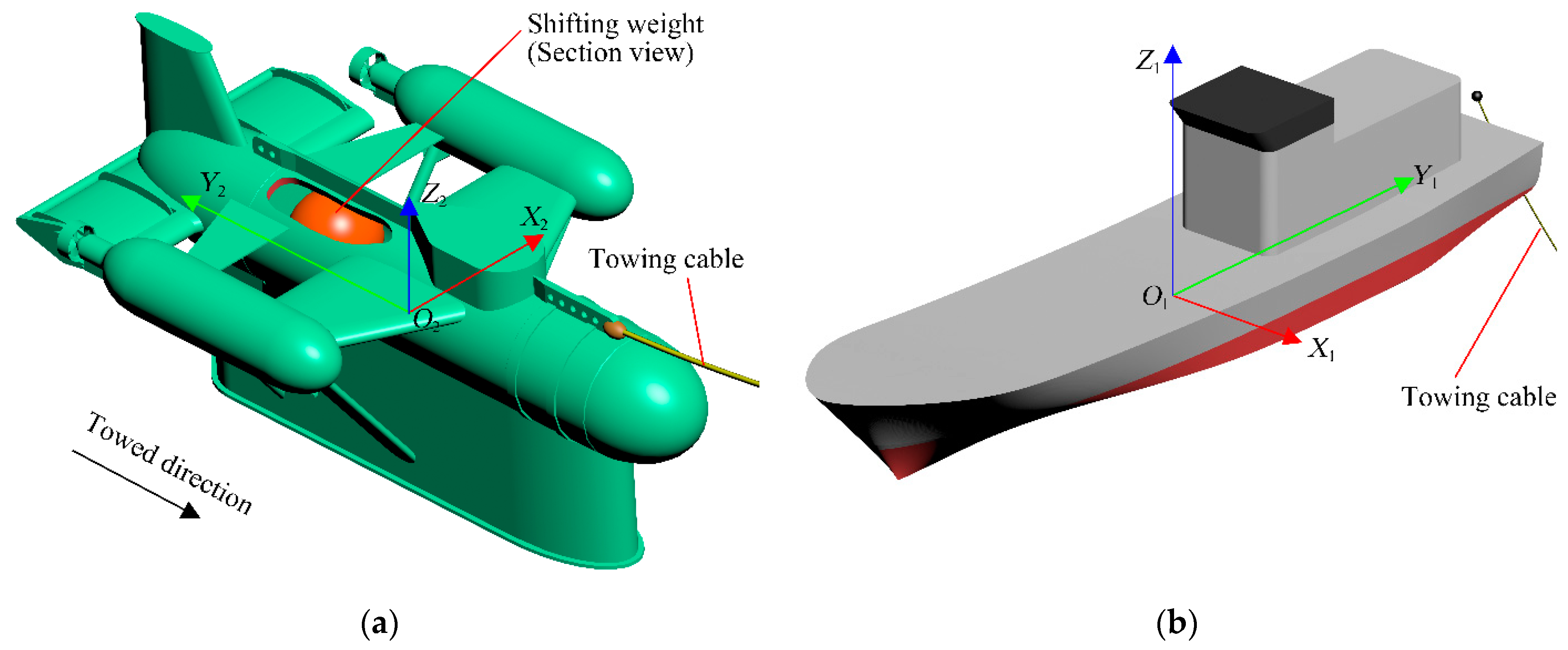
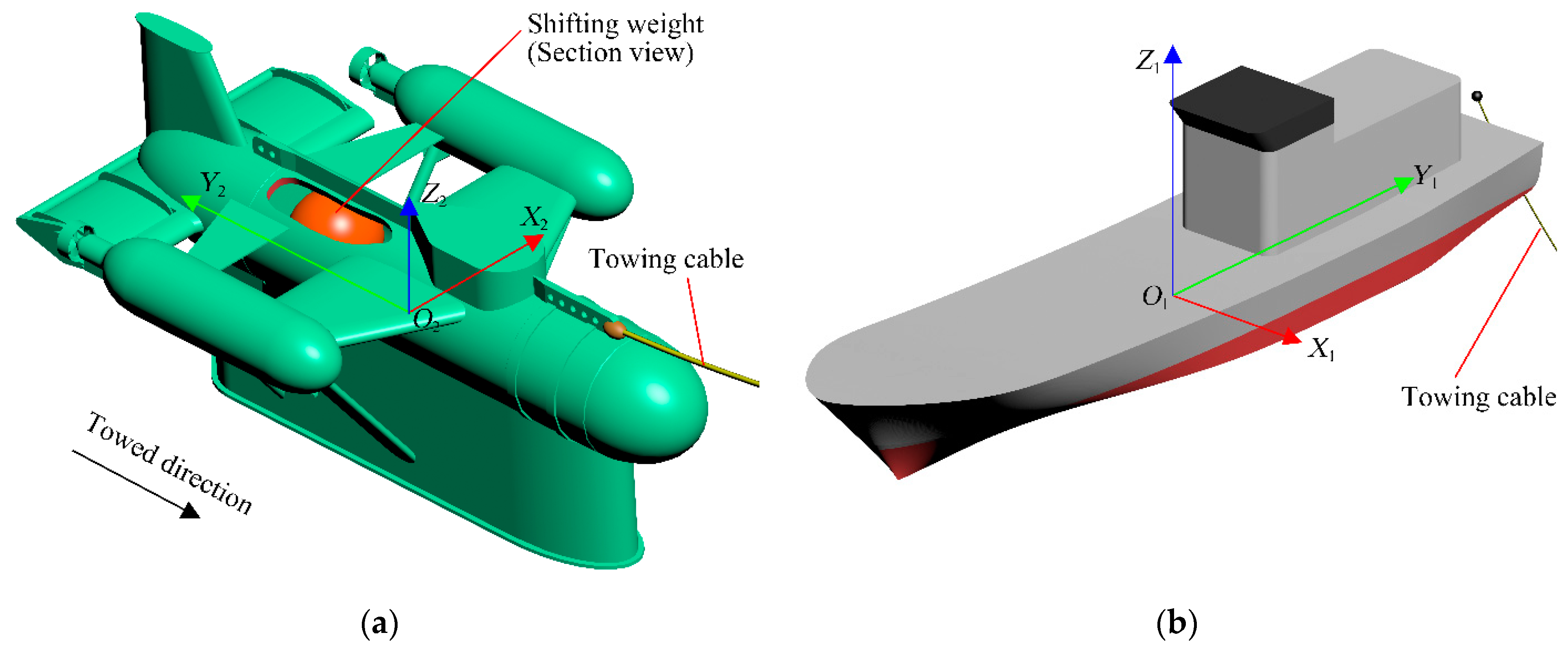
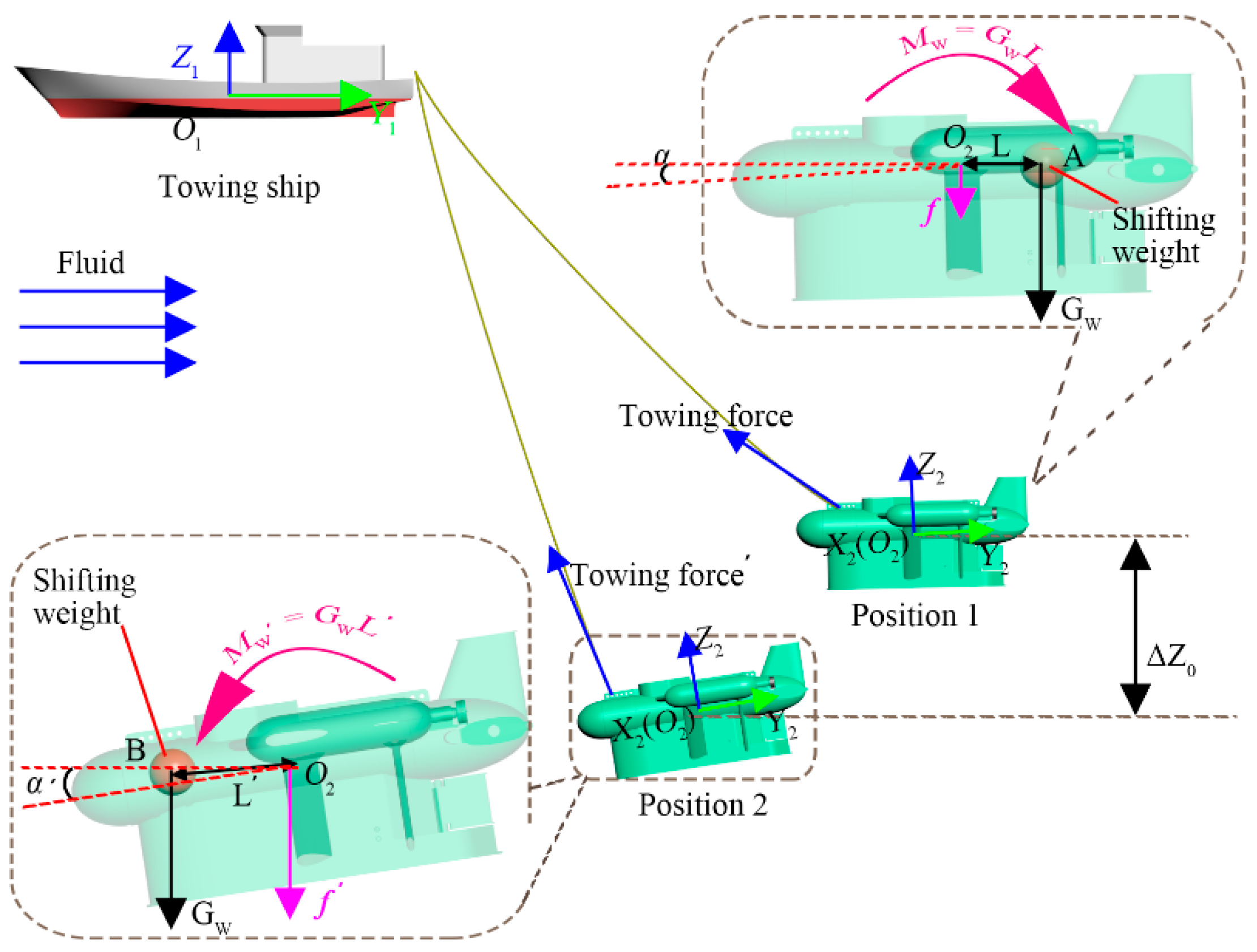
As is shown in
Figure 2, the shifting weight arranged in a watertight cabin is driven by a servo motor and moves along the longitudinal direction (
Y2 direction) of the towed vehicle. The depth tracking control system can control the pitching angle of the towed vehicle by controlling the longitudinal position
L of the shifting weight and longitudinal moment caused by the shifting weight at
O2 to realize the submerged depth control of the towed vehicle. Specifically, as is shown in
Figure 5, the whole towed vehicle is treated as a hydrofoil in the
X2Y2 plane. When the shifting weight moves from point A to point B, the longitudinal moment formed by the shifting weight‘s gravity
GW at
O2 changes from
MW to
MW′ accordingly. Obviously, the change of the additional longitudinal moment results in the pitching angles of the towed vehicle increasing from
α to
α’; according to the wing theory, the lift acting on the towed vehicle increases from
f to
f’, accordingly. According to Newton’s second law, the towed vehicle will undergo an acceleration until it reaches a new balance position (Position 2) from the current position (Position 1). When the shifting weight moves from point B to point A, it is the other way round.
The control system works as described above. In this paper, the position
L of the shifting weight was described in the coordinate system
O2-
X2Y2Z2 whose
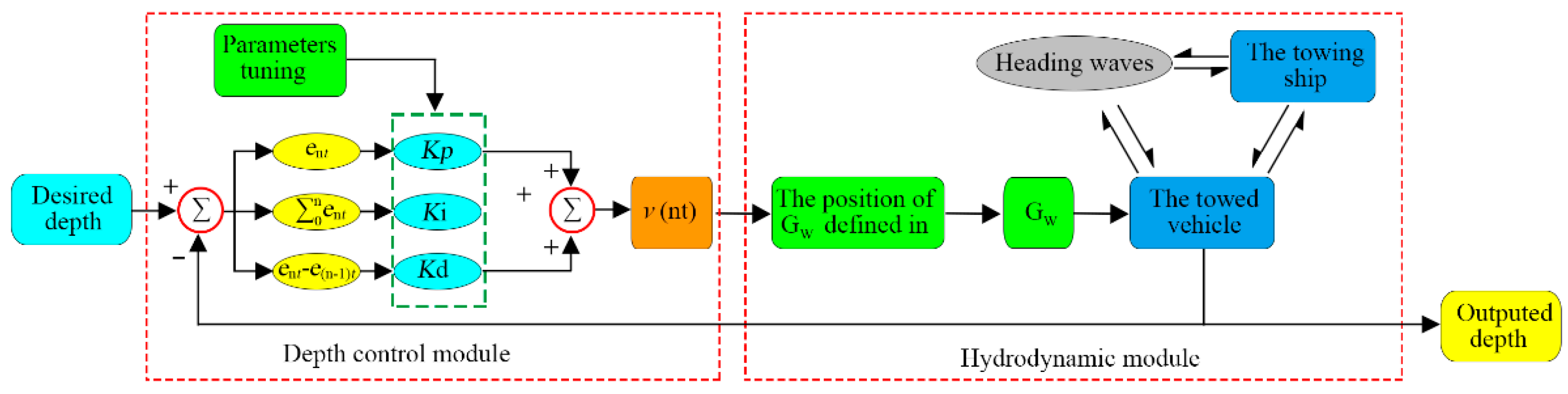
O2 is the center of gravity of the towed vehicle not including the shifting weight. The PID-based control system controls the speed of the shifting weight to control the longitudinal position of the shifting weight [
21]. In the control system, to avoid the damage caused by the collision between the shifting weight and other structures, limit positions of the shifting weight are defined. When the shifting weight oversteps the safety range, the longitudinal velocity of the shifting weight becomes zero until the system output makes the shifting weight return to the safety range. The longitudinal velocity
v(nt) of the shifting weight can be written as:
where
Kp,
Ki, and
Kd are the PID parameters;
en is the vertical position deviation, and
L is the longitudinal position of the shifting weight defined in
O2-
X2Y2Z2.
Figure 6 shows the simulation flow of the control system in this paper as followings:
Step 1: Combined with
Section 2.6, construct a control and CFD collaborative simulation system as shown in
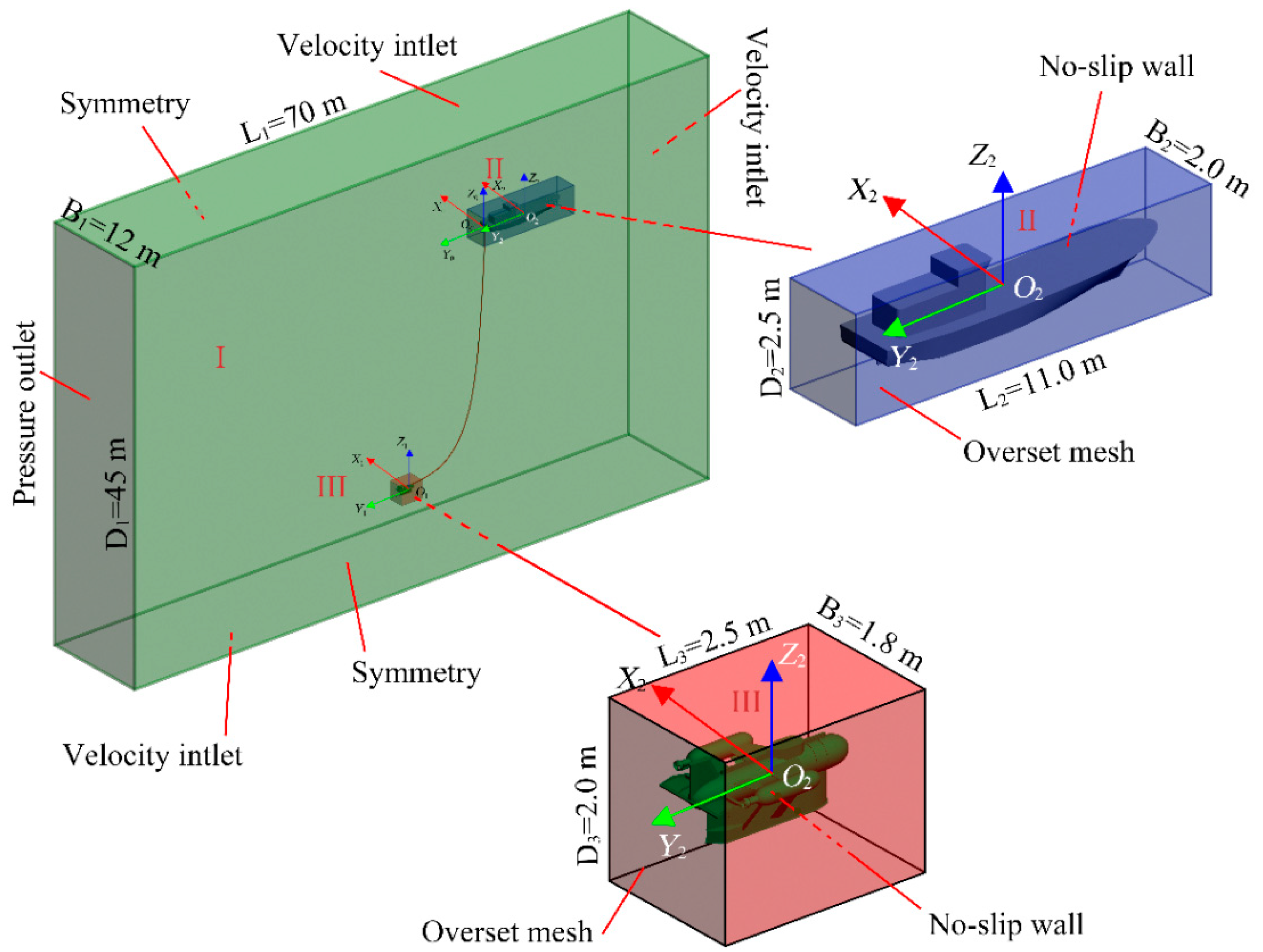
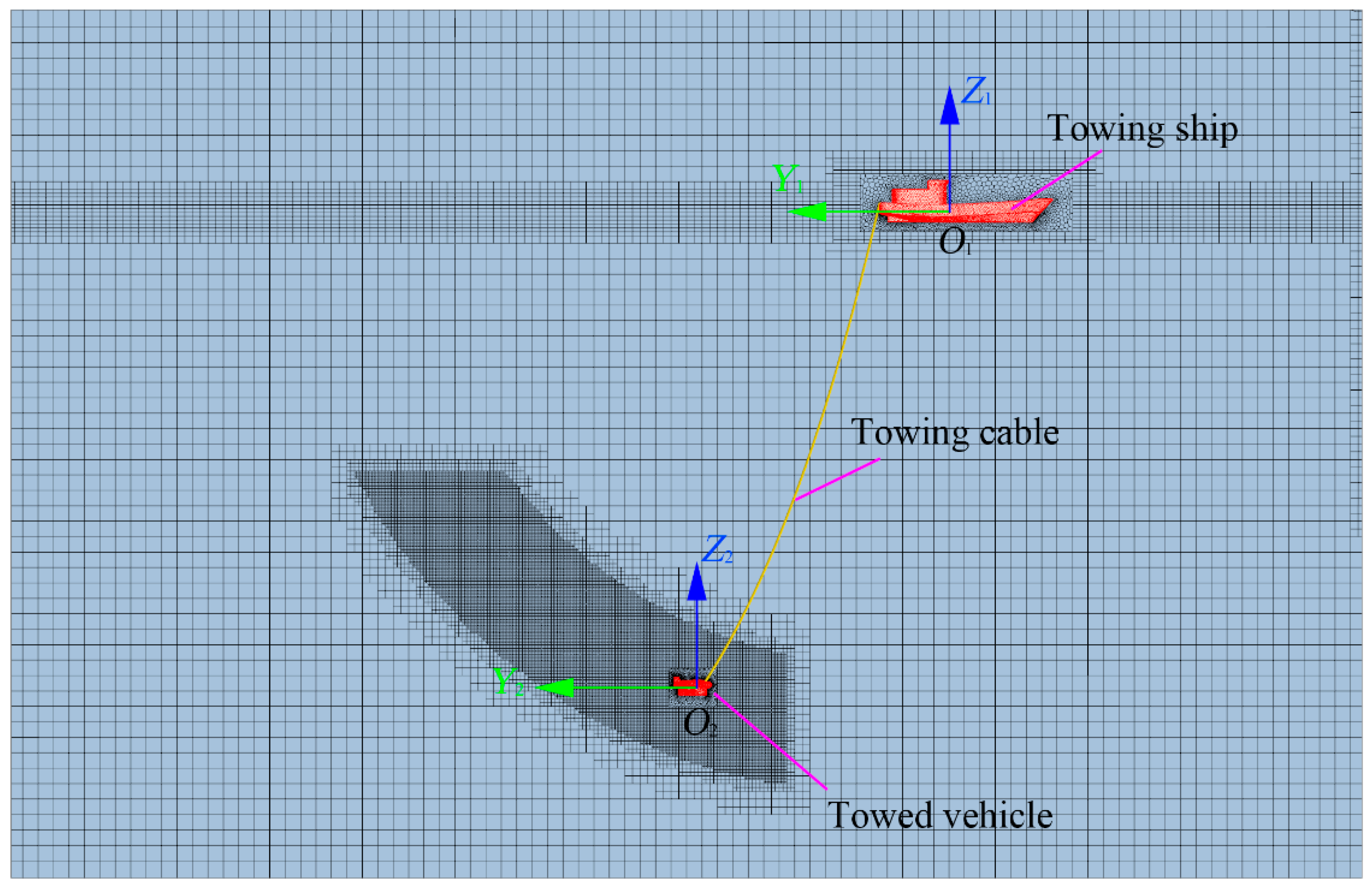
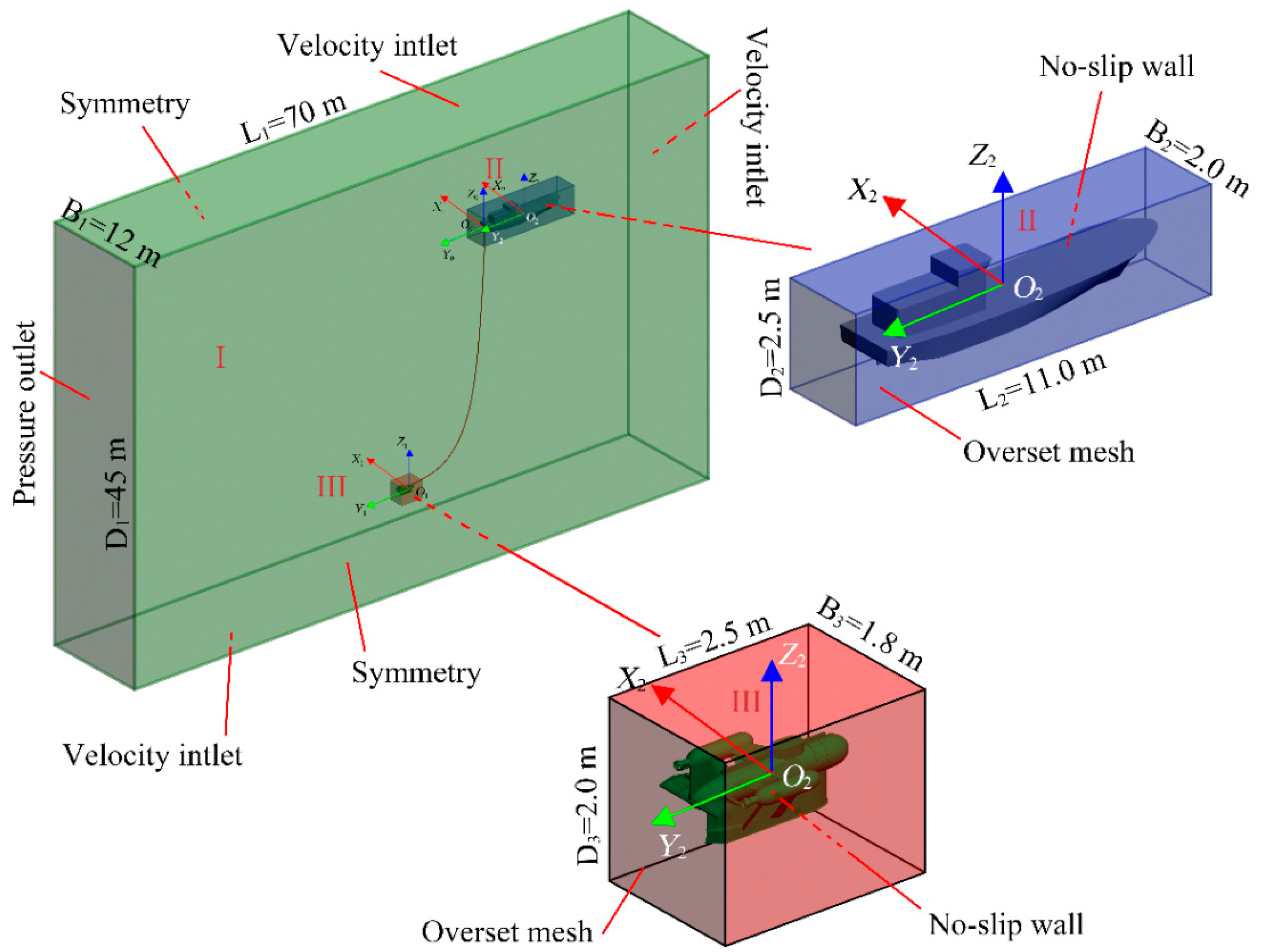
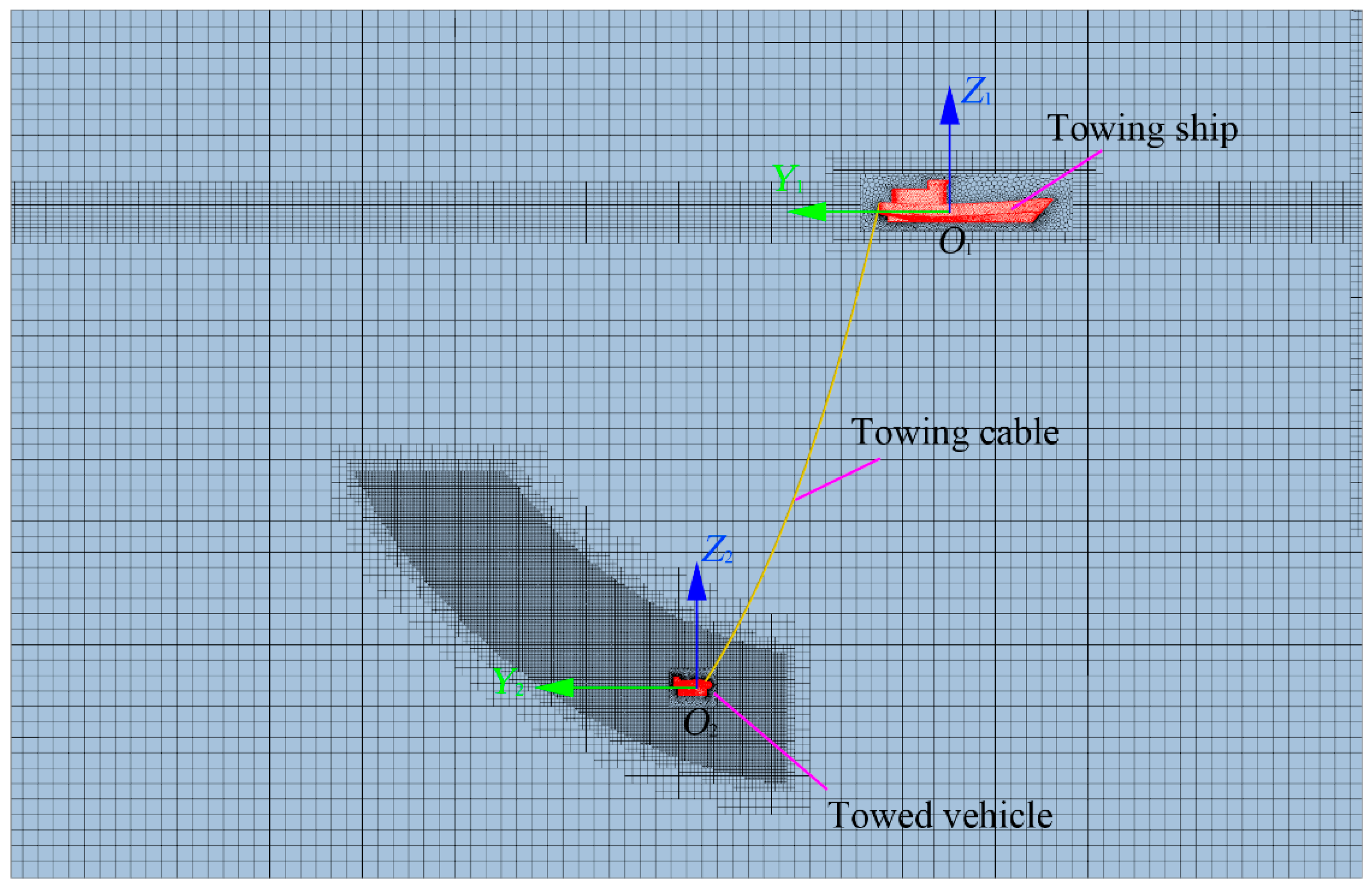
Figure 6. Create the computational domains shown in
Figure 3 and
Figure 4; create the towing cable model and connect the towing ship and the towed vehicle; establish the PID control equations and connect the control model with the CFD model.
Step 2: In the process of the PID parameters tuning, three possible PID parameters are given to the initial system, then a target depth is given; run the simulation, observe the deviation between the outputs submerged depth of the towed vehicle and the target one; adjust the PID parameters accordingly. Repeated this until an acceptable deviation occurs.
Step 3: Enter a desired submerged depth and start the simulation.
5. Simulation Results and Discussion
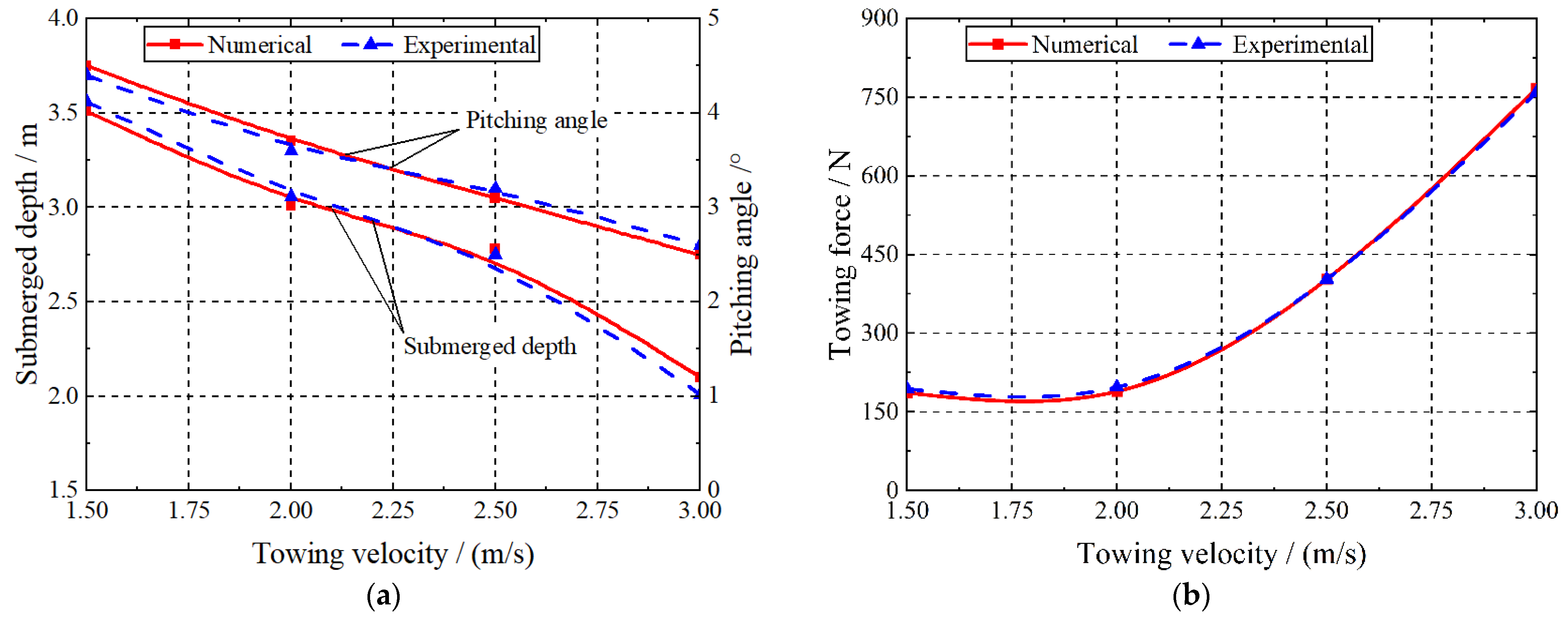
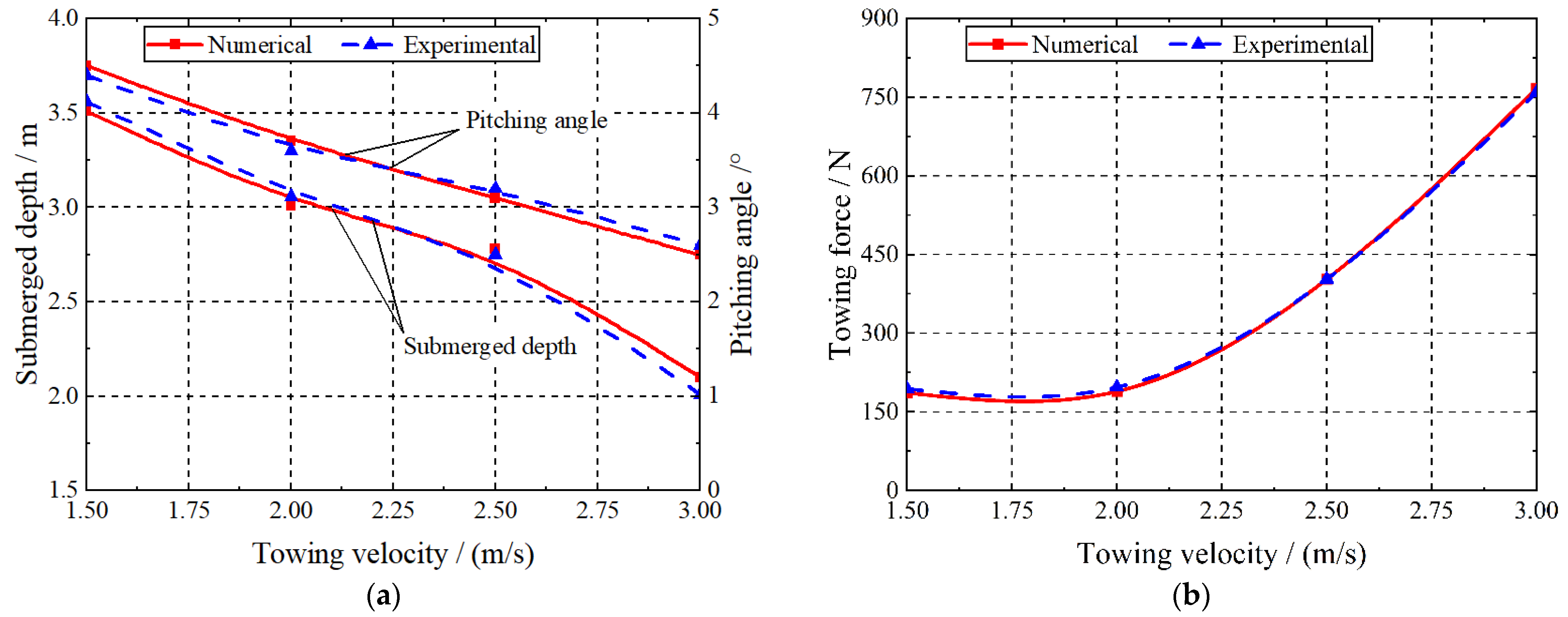
It can be seen from the results in
Figure 8 that it was feasible to simulate the underwater towed system by the numerical method mentioned above. In this section, the vertical trajectory tracking in head waves of the complete towed system, as is shown in
Figure 1, was numerically simulated. In the simulation, the wave height was 0.5 m, the wavelength was 36 m, and the forward speed was 5 kn;
Kp = −0.045,
Ki = −0.000015,
Kd = −8.5. At
t = 0 s, the towed vehicle was freely suspended in still water, and the towing cable drooped naturally; when 0<
t ≤ 100 s, the shifting weight was held at
L = 0 m, and the towed vehicle was towed uncontrollably until it reached a stable state;
t > = 100 s, depth tracking control was initiated. There were three stages in the depth tracking control, that is, Stage I: tracked the target
Z0 = −14.5 m in the period of 100 s<
t ≤ 200 s; Stage II: tracked the target
Z0 = −17.0 m in the period of 200 <
t ≤ 300 s; Stage III: tracked the target
Z0 = −18.0 m in the period of 300 s <
t ≤ 400 s.
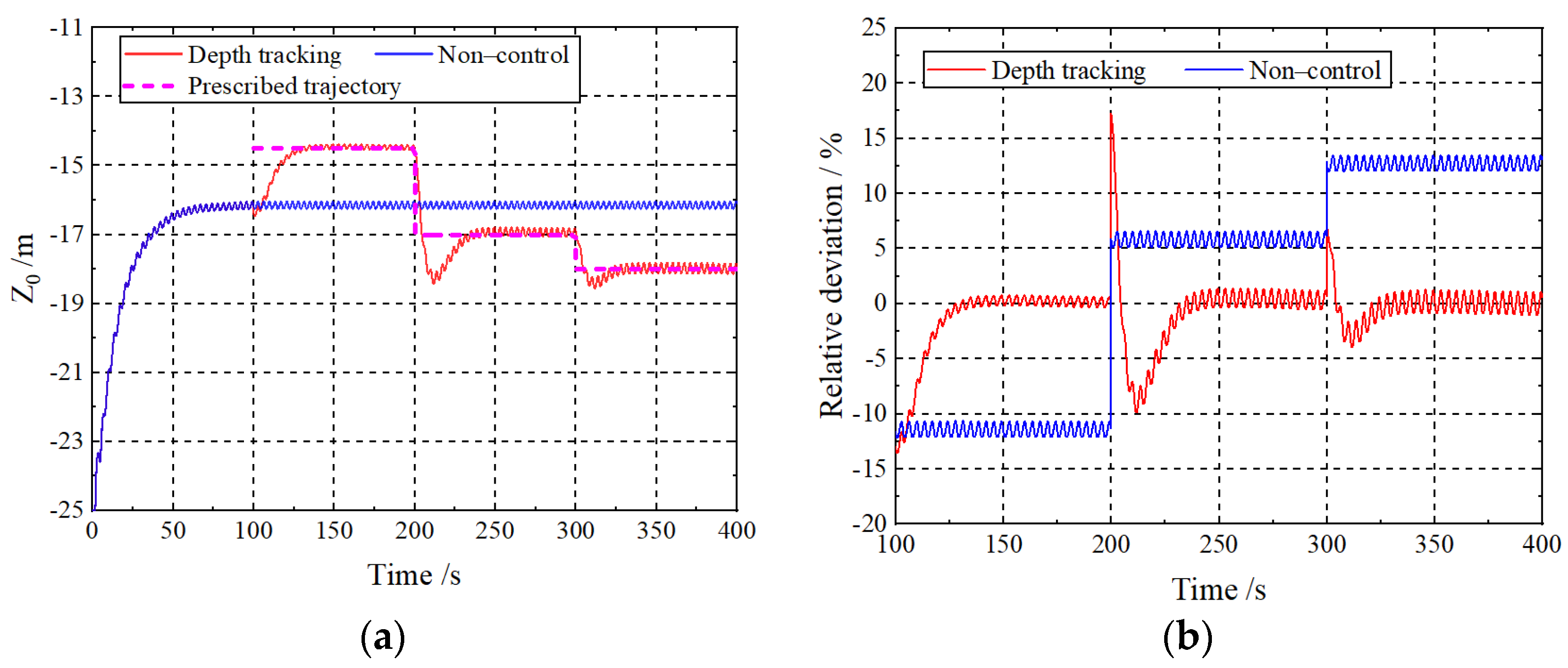
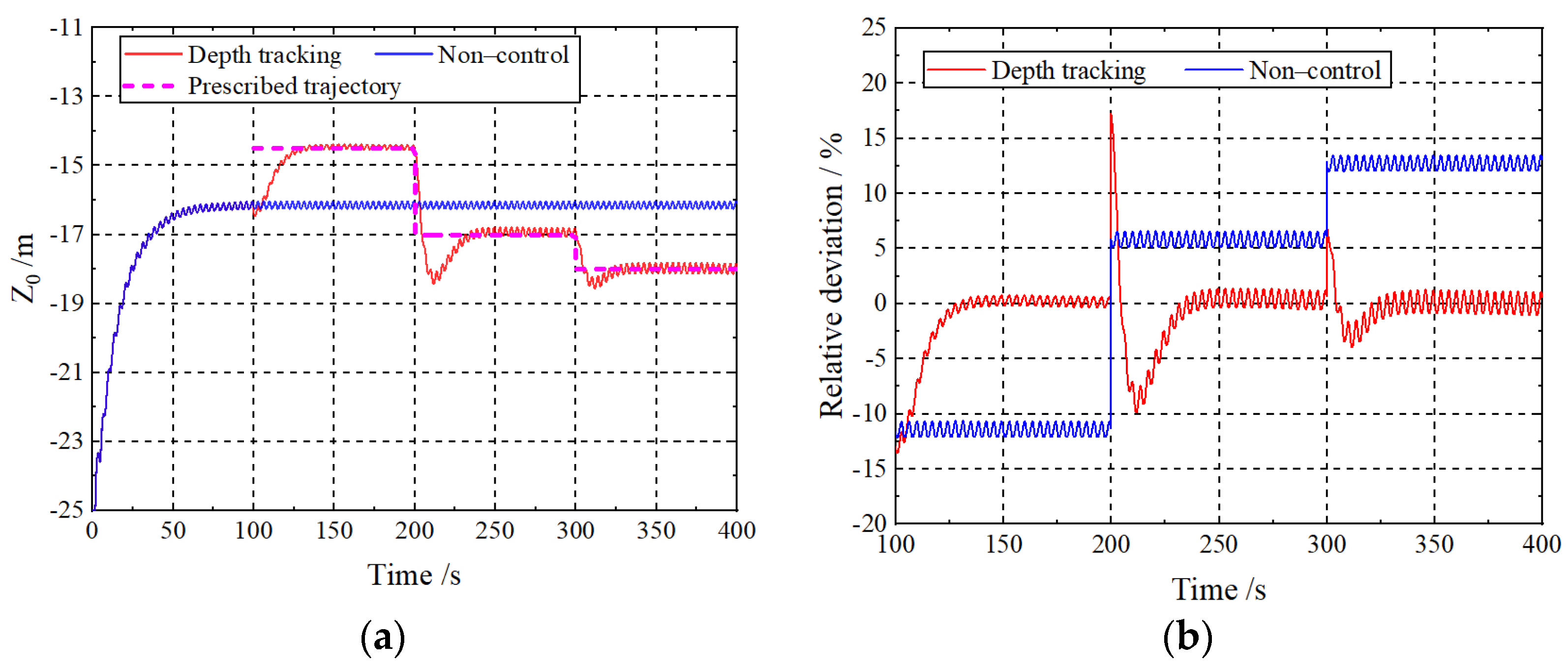
The numerical simulation results of the vertical trajectory tracking operation of the towed vehicle are given in
Figure 9a,b. As shown in
Figure 9a, the towed vehicle ascended rapidly from the original position to the target after the target
Z0 = −14.5 m was given at
t = 100 s, then vibrated stably around the target; similarly, as the new target
Z0 = −17.0 m and
Z0 = −18.0 m were given at
t = 200 s and
t = 300 s, respectively, the towed vehicle could also approach rapidly and vibrate stably around the new targets; as shown in
Figure 9b, the steady-state deviation between the instantaneous vertical trajectory and the prescribed one of the towed vehicle was within 2.0%. The depth tracking system exhibited a good control robustness, and the target trajectory was tracked well in each stage. In addition, the vertical trajectory fluctuation of the towed vehicle under the depth tracking control system’s control was equivalent to the non-control condition, which indicated that the vertical trajectory saw no deterioration under the depth tracking control operation.
In addition, it can be seen from
Figure 9 that the steady-state vertical oscillation amplitude of the towed vehicle changed with the change of the submerged depth. Specifically, that is, with the increase in the submerged depth, the vertical vibration amplitude of the towed vehicle increased. However, it is believed that the effects of wave on the motion of the underwater vehicle should be reduced with an increasing depth. In fact, when the towed vehicle was in a lower position, the angle between the almost-tight towing cable and the vertical direction was smaller, and the disturbance (vertical motion) of the towing point P
s would be more transmitted to the towed vehicle. It’s almost certain that the smaller the angle between the almost-tight towing cable and the vertical direction, the greater the disturbance transmitted to the towed vehicle. This was why the vertical oscillation of the towed vehicle did not decrease with the submerged depth, but increase.
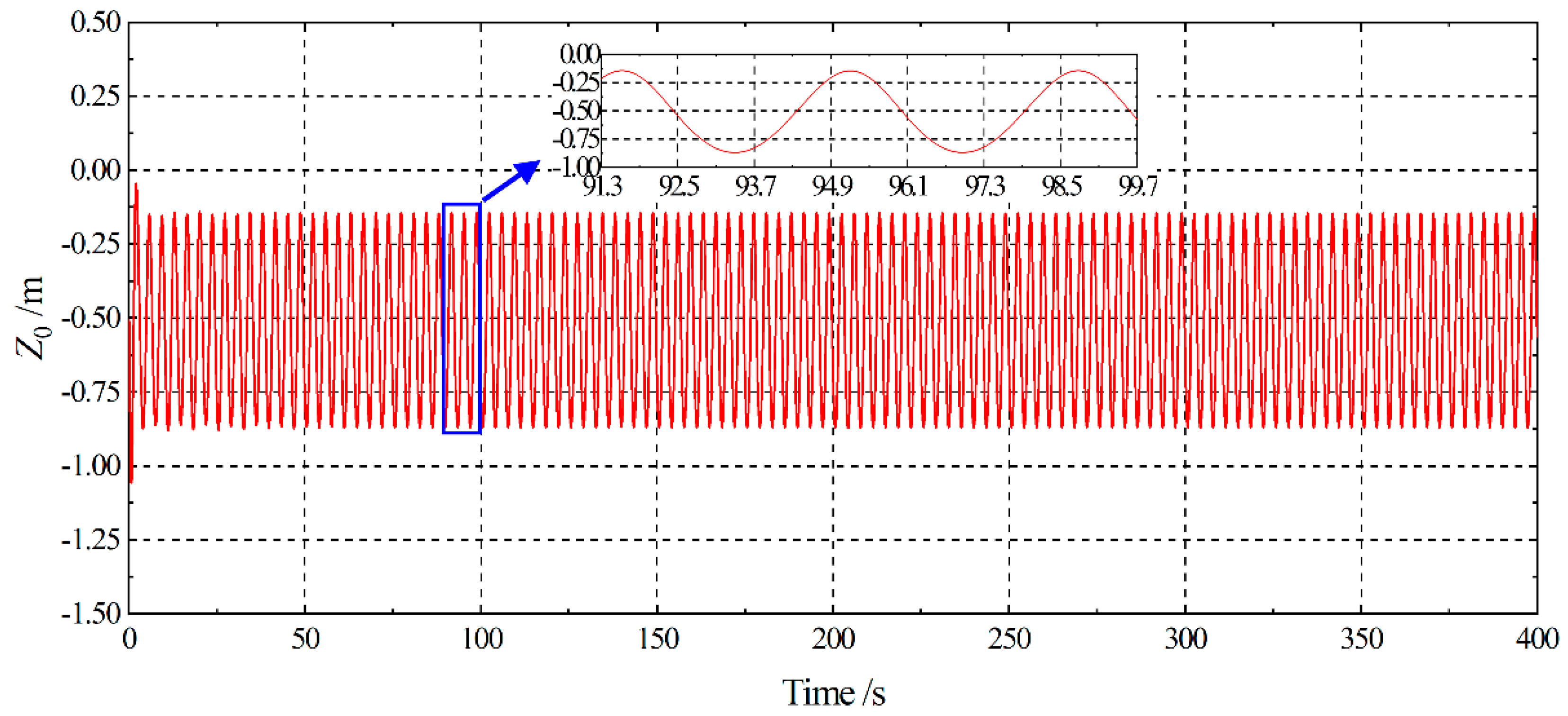
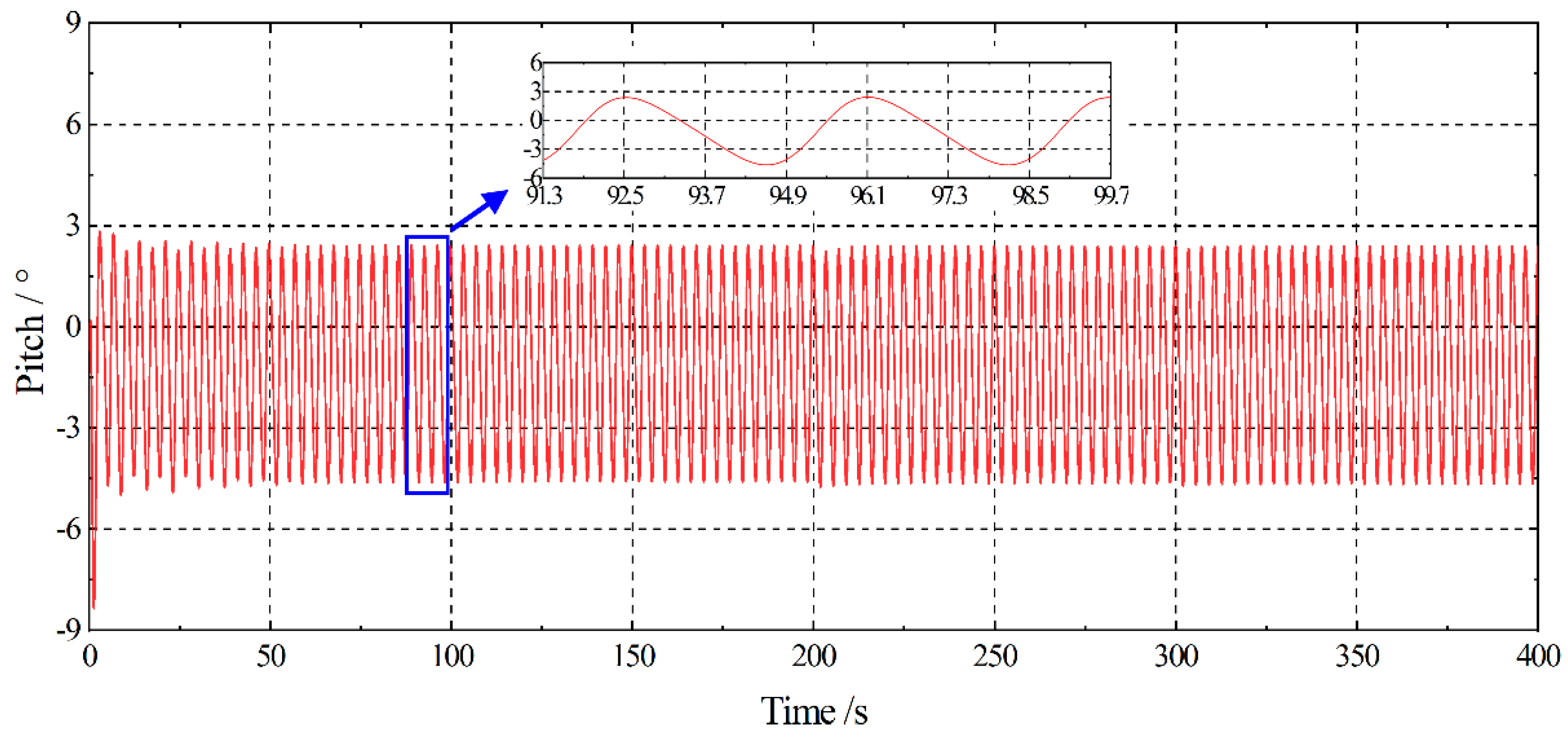
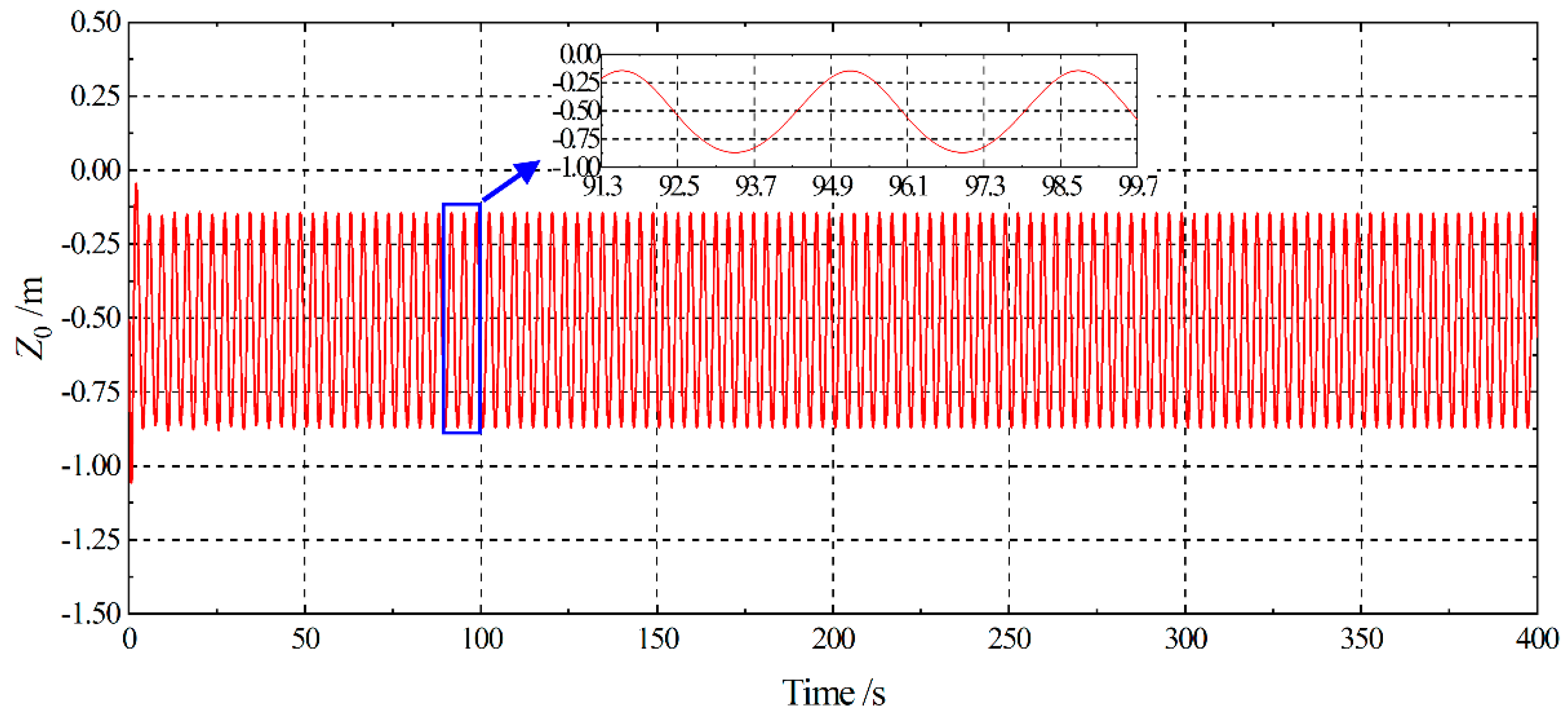
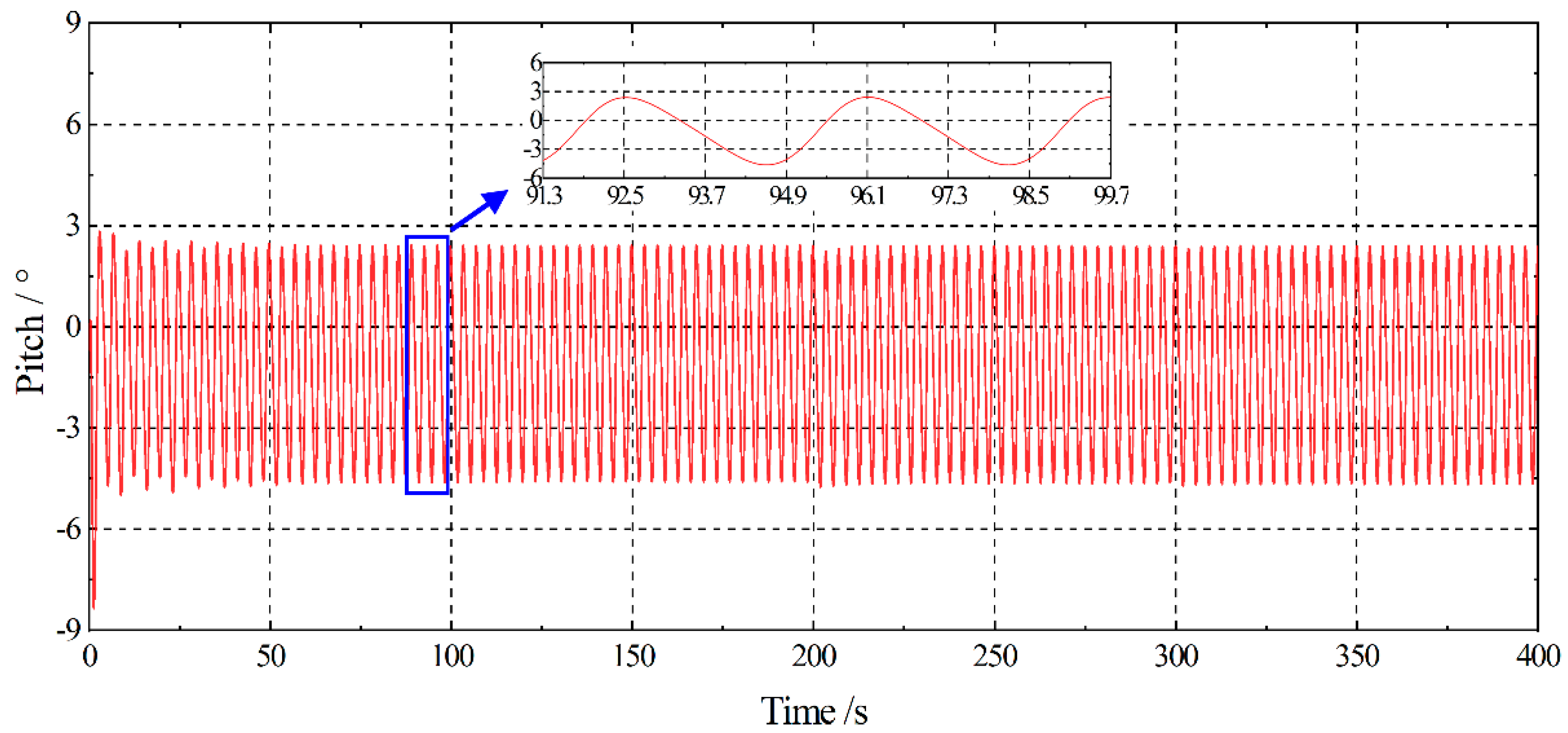
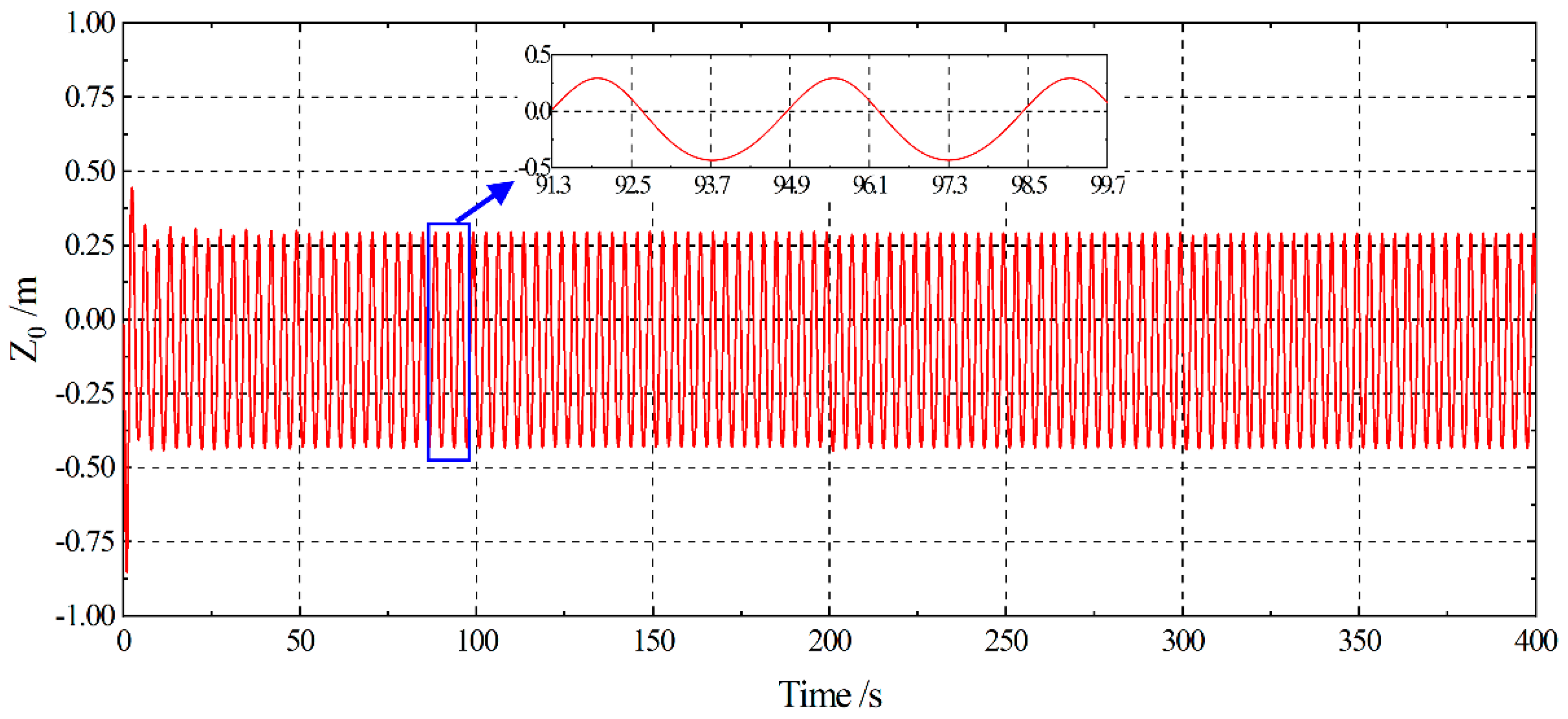
Figure 10 and
Figure 11 show the time histories of the vertical trajectory and the pitching angle of the towing ship, respectively;
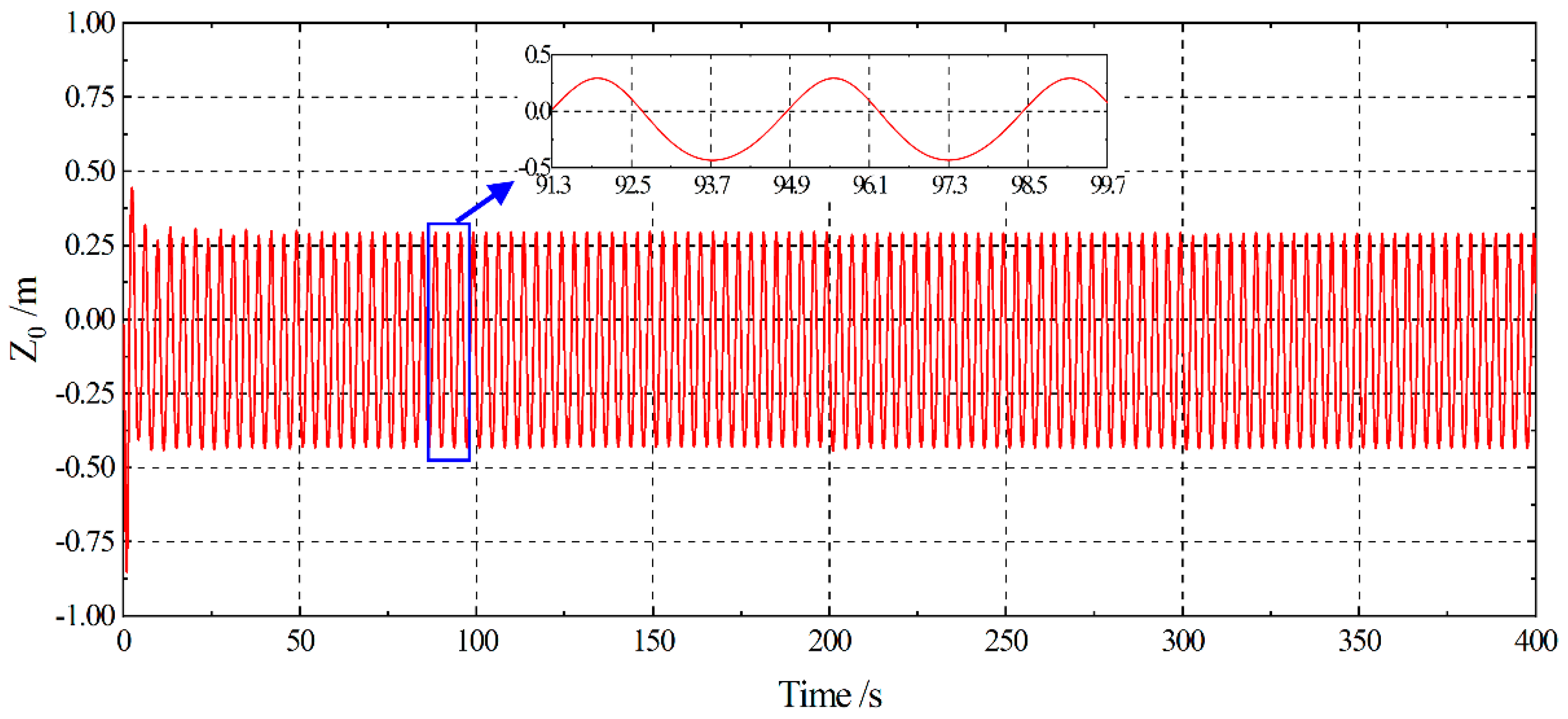
Figure 12 shows the vertical trajectory of the towing point P
s. It can be seen that under the influence of the head waves, the towing ship vibrated in the vertical plane with an amplitude of about 0.35 m and a period of about 3.6 s. At the same time, the pitching angle vibrated around −1° with an amplitude of about 3.0° and a period of about 4.0 s. The towing point P
s oscillated periodically around
Z0 ≈ −0.1 m with an amplitude of about 0.35 m and a period of about 3.6 s. It can be seen from
Figure 9 and
Figure 10 that the oscillation of the towing ship was much greater than that of the towed vehicle; the depth tracking operation of the towed vehicle had no significant effect on the towing ship.
Figure 13 shows the attitude of the towing ship and the towed vehicle when the towing ship was at different positions of the head waves. As shown, the numerical results in
Figure 10,
Figure 11,
Figure 12 and
Figure 13, the vertical position and pitching angle of the towing ship, the vertical position of the towing point P
s changed periodically with the towing ship moving from the trough to the crest of the head waves periodically. As the towing ship moved from the wave trough to the wave crest, the center of gravity of the towing ship ascended, the pitching angle decreased, and the towing point P
s moved upward. While the towing ship moved from the wave crest to the wave trough, the situation was in an exact opposite way.
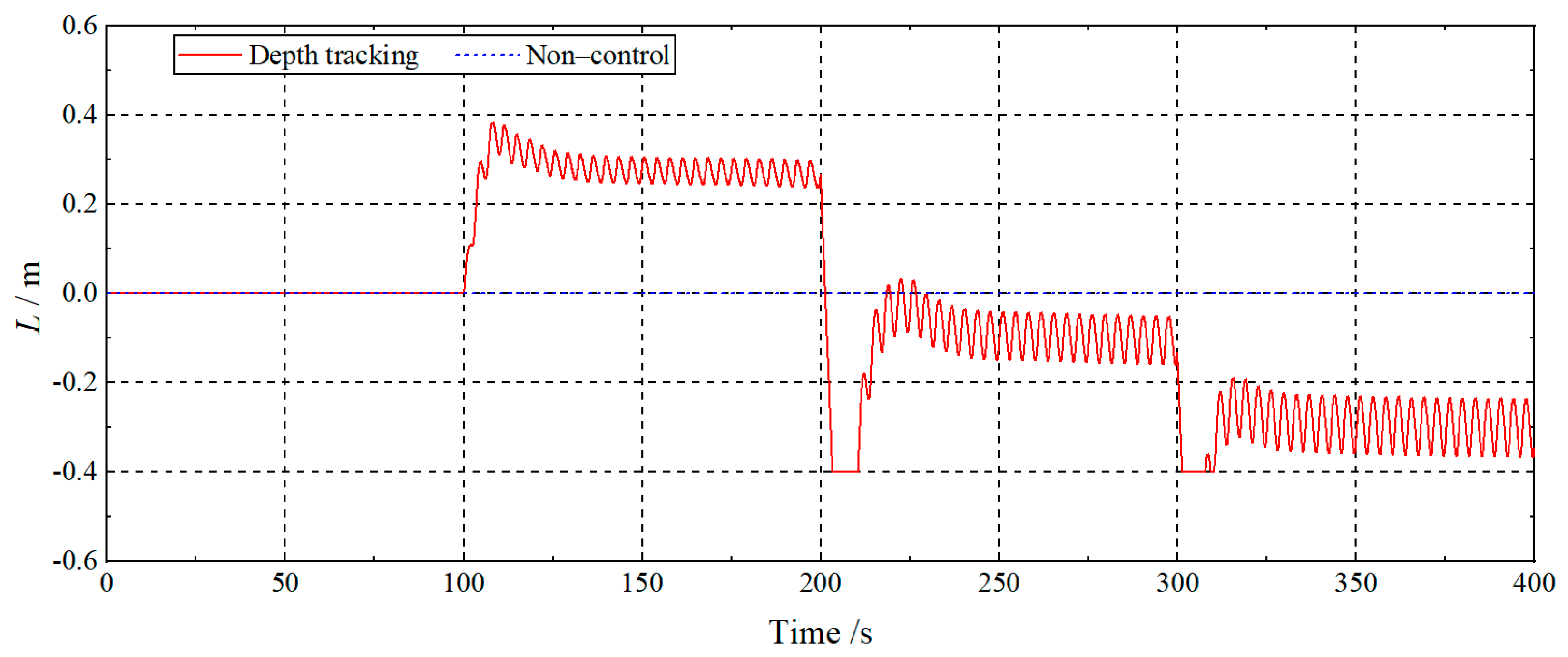
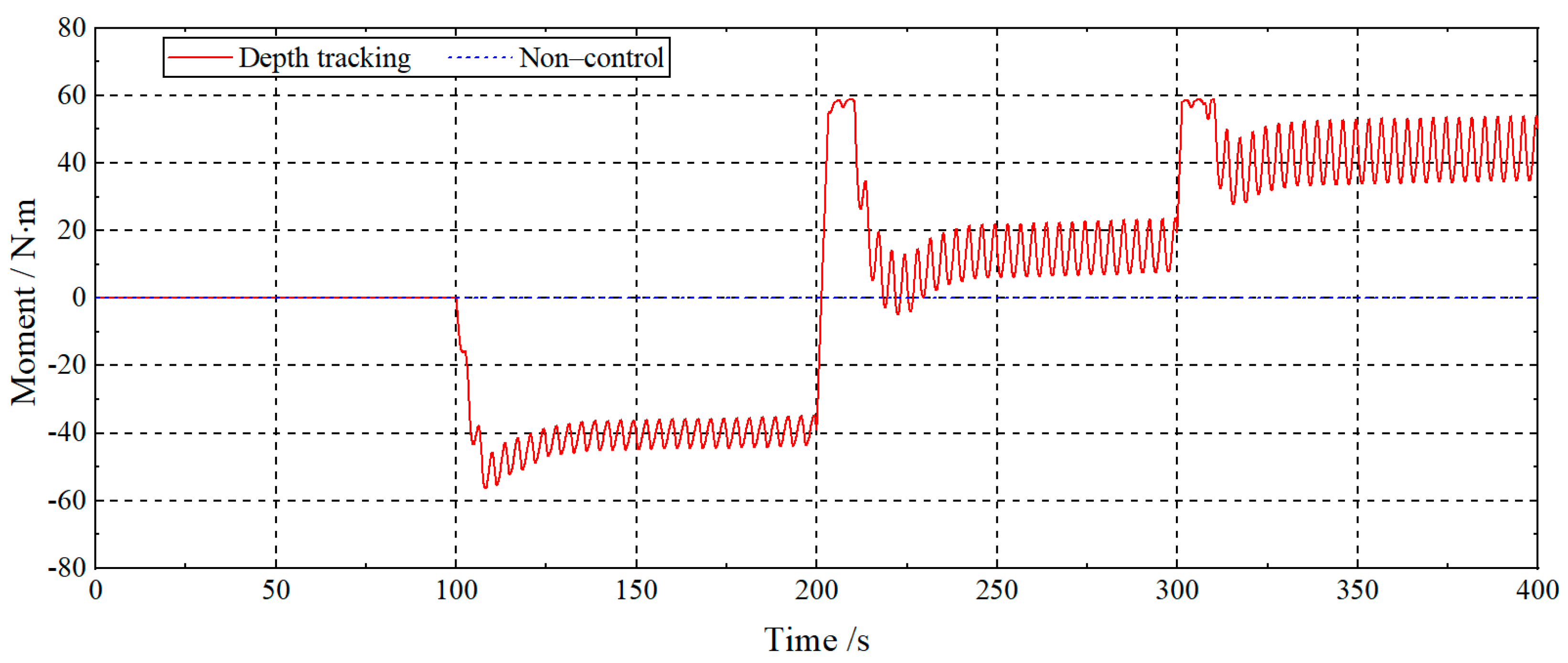
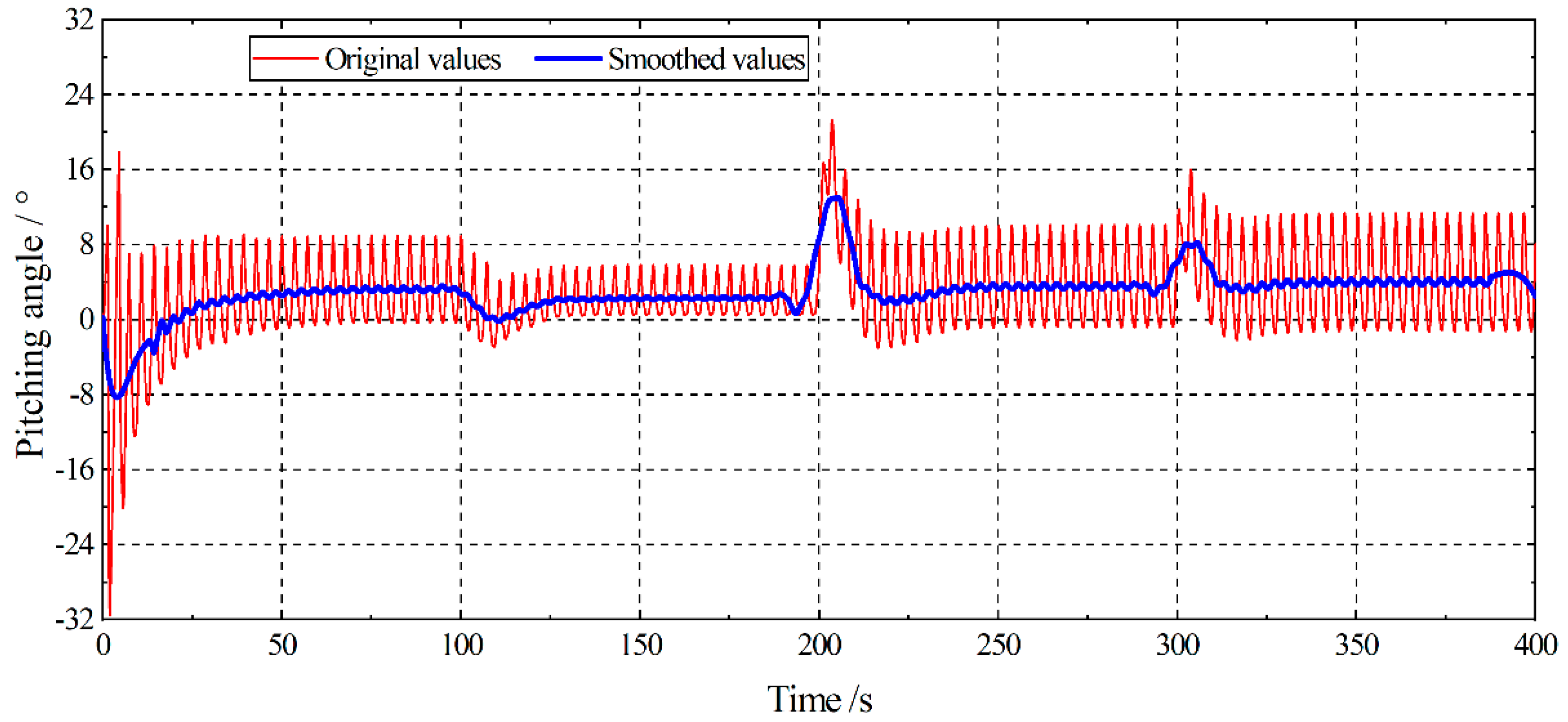
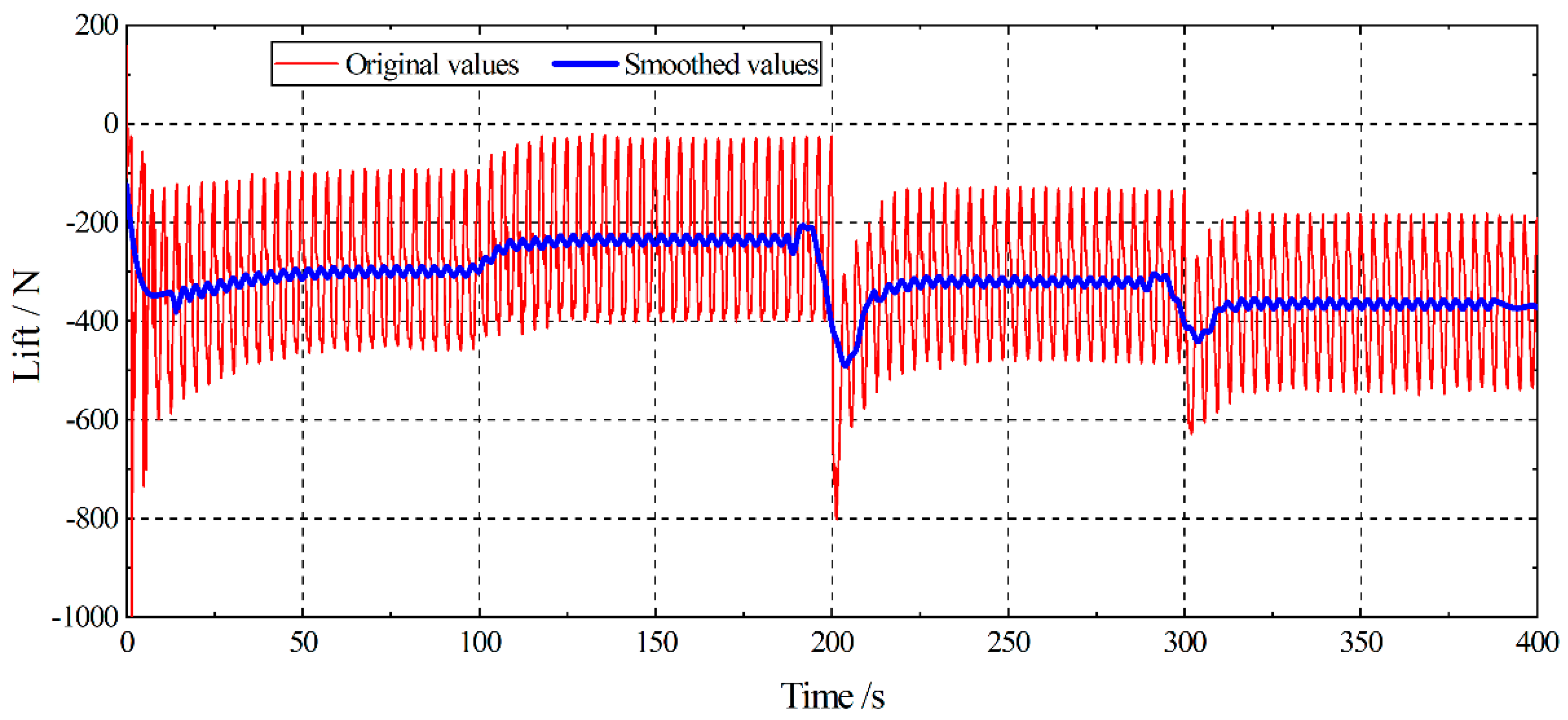
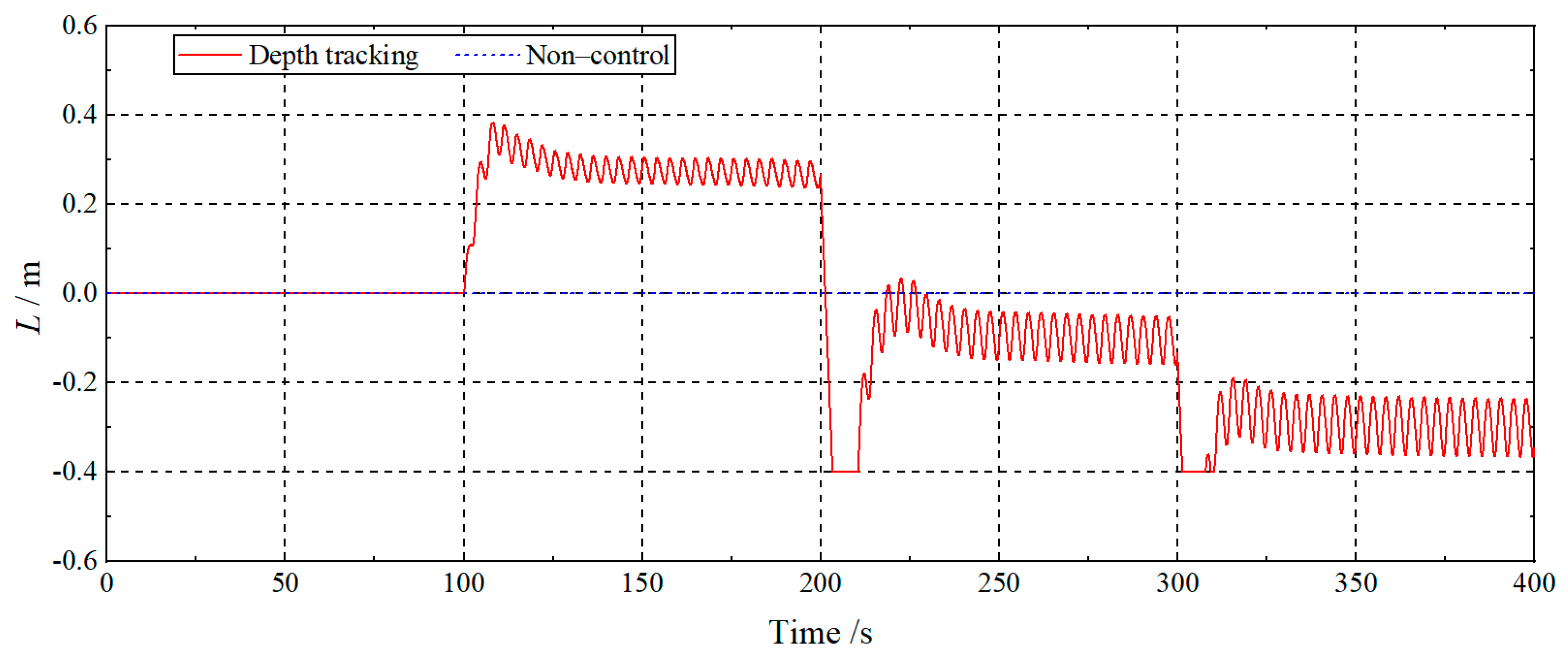
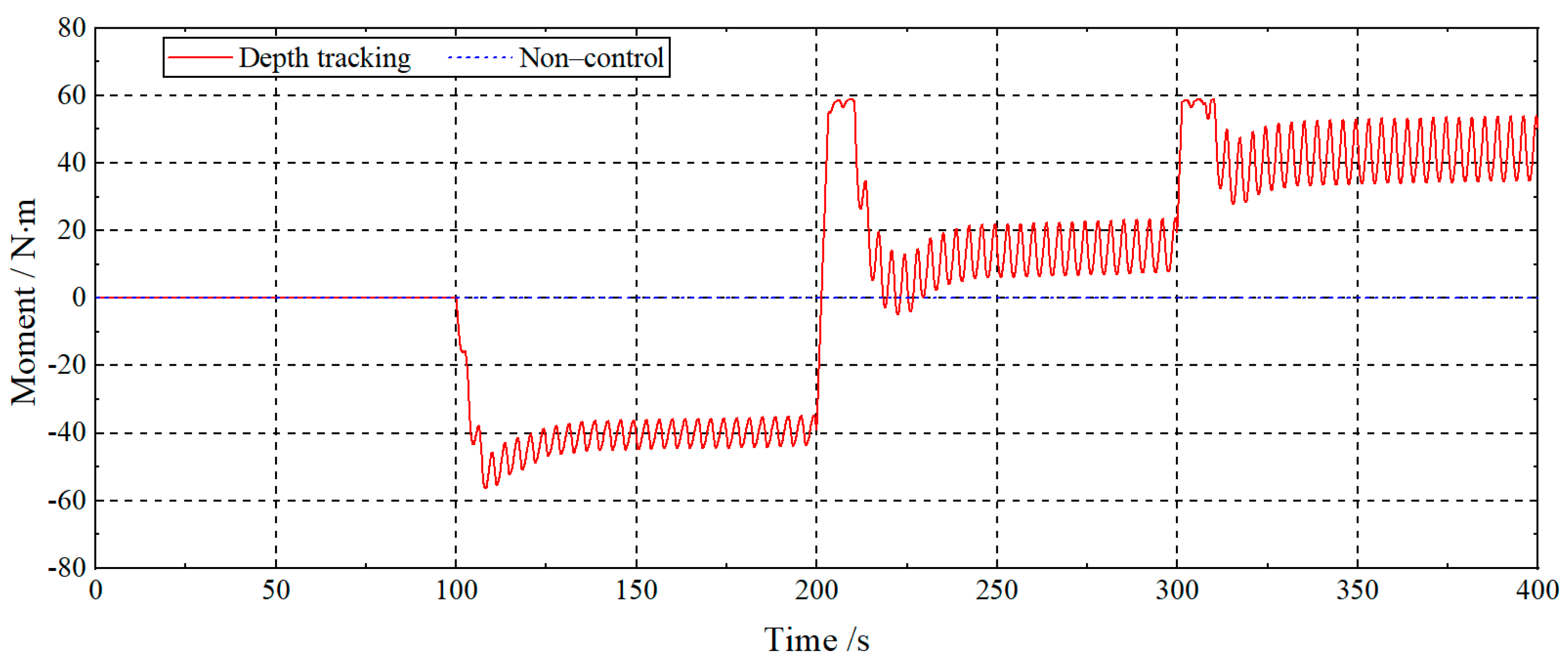
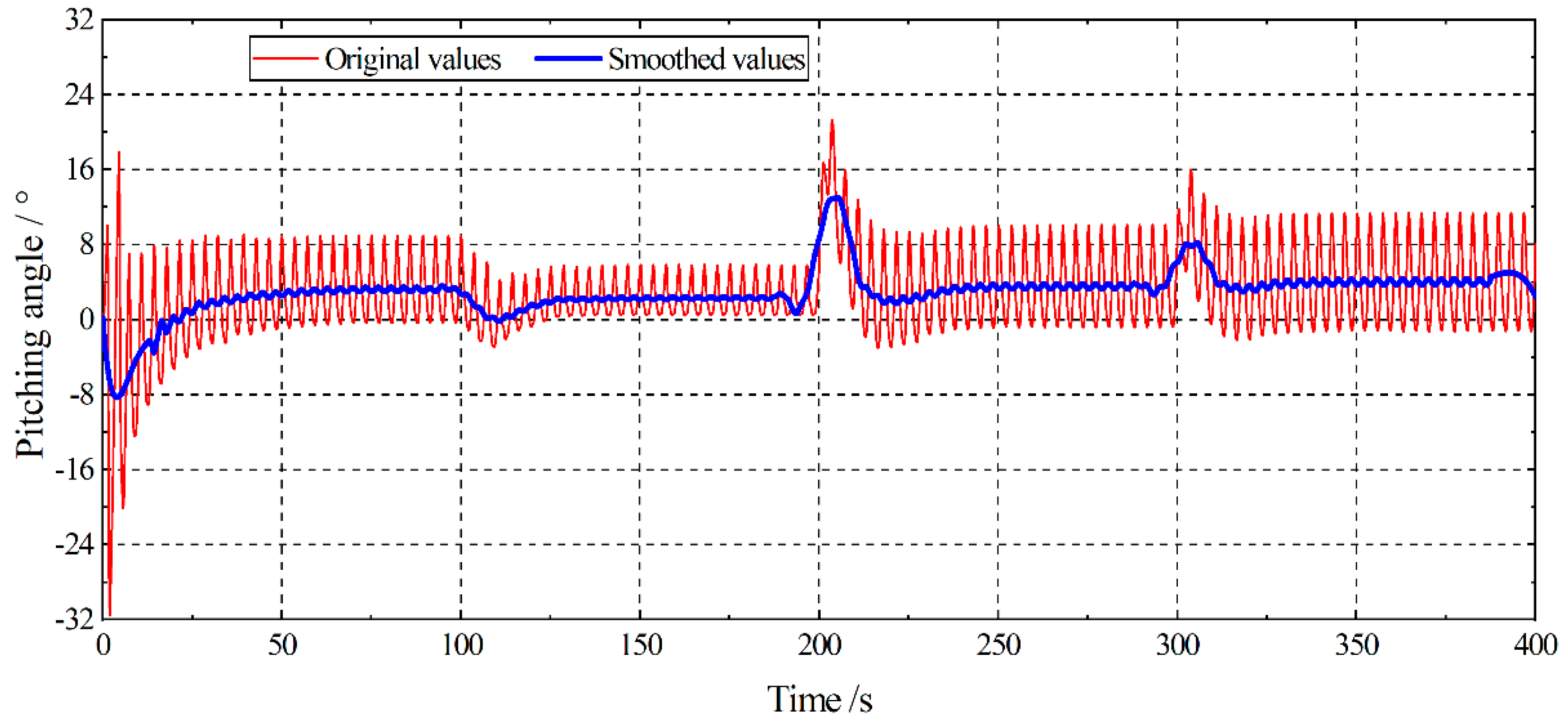
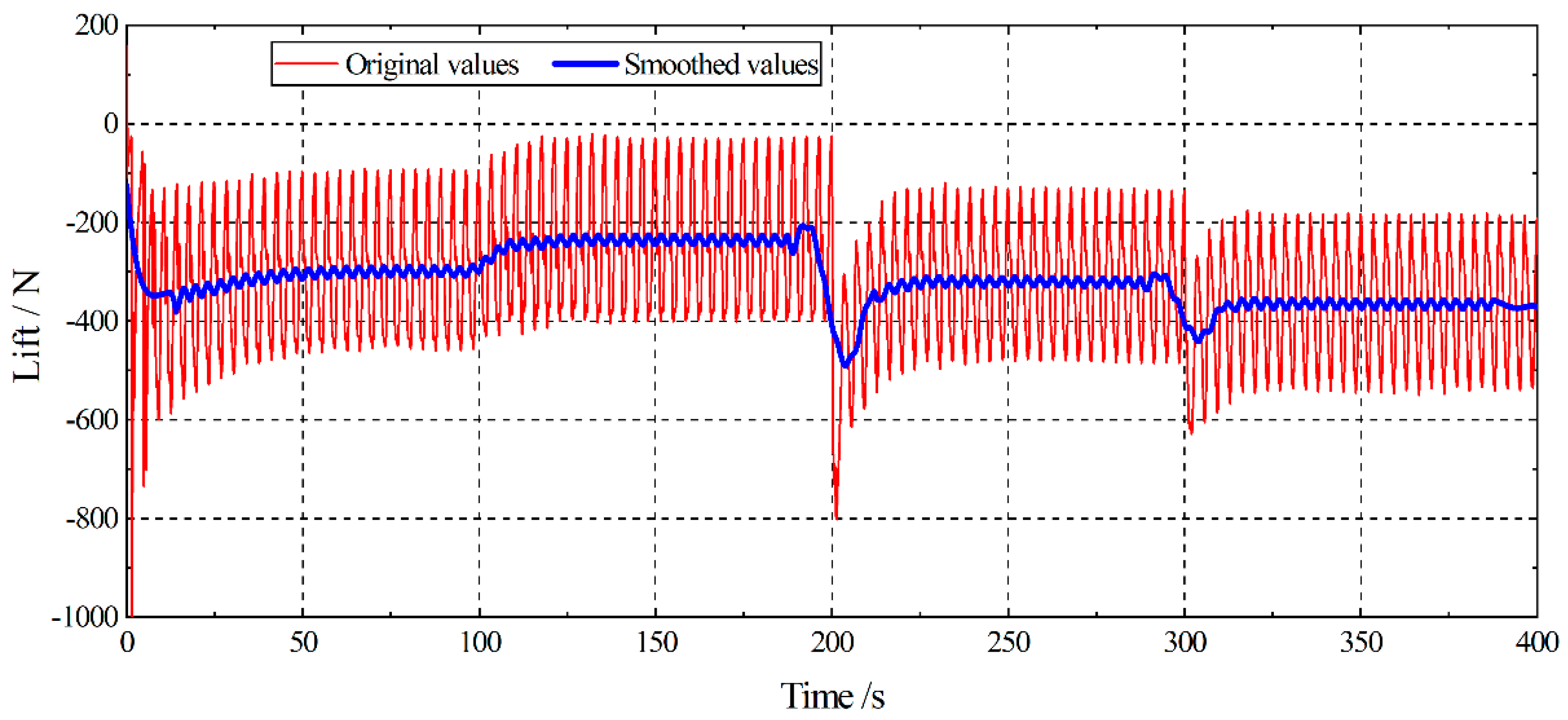
The depth tracking operation of the towed vehicle was closely related to the lift variation resulting in the change of the longitudinal position of the shifting weight. The time histories of the longitudinal position of the shifting weight, the longitudinal moment caused by the shifting weight at the
O2, the pitching angle of the towed vehicle, and the lift on the towed vehicle are shown in
Figure 14,
Figure 15,
Figure 16 and
Figure 17, respectively. The 5th order Savitzky–Golay method was used to smooth the time histories of the pitching angle and the lift.
At the beginning of Stage Ⅰ, the vertical target Z0 = −14.7 m was above the instantaneous one, the shifting weight shifted backward (L > 0) rapidly and then vibrated stably around L = 0.3 m. A longitudinal moment that made the towed vehicle raise its head was formed at O2 as the shifting weight leaves away from O2. The time-mean down-pitch angle of the towed vehicle decreased, and the value of the downward lift decreased. The original equilibrium state was broken. The towed vehicle tracked the target trajectory and ascended rapidly.
In Stage II, the shifting weight moved forward (L < 0), the longitudinal moment at O2, which increased the down-pitch angle of the towed vehicle, reversed. The time-mean down-pitch angle of the towed vehicle increased, the value of the downward lift increased, and the towed vehicle descended.
Similarly, as the target trajectory further decreased to
Z0 = −18.0 m in Stage III, the value of the downward lift further increased, and the towed vehicle continued to descend. In the above stages, the moment formed by the longitudinal position changed of the shifting weight, the pitching angle of the towed vehicle, and the lift all vibrated with the oscillation of the shifting weight. This was the result in the control system dynamically controlling the shifting weight forward or backward to maintain a small deviation under the interference of the head waves. The longitudinal velocity of the shifting weight driven by the servo motor determined the responsiveness of the control system, the result was that the vertical oscillation of the towed vehicle in the short period head waves persisted. However, as shown in
Figure 9, the trajectory and attitude of the towed vehicle saw no deterioration due to the dynamic adjustment of the shifting weight.
Moreover, as mentioned in the analysis of
Figure 9, when the towed vehicle was in a lower position, the angle between the towing cable and the vertical direction was smaller, and the disturbance of the towing point P
s would be more transmitted to the connected point P
t of the towed vehicle, so that the oscillation amplitudes of the vertical trajectory and the pitching angle of the towed vehicle increased with the increasing depth. Further, the increase in the vertical oscillation amplitude would inevitably lead to the increase in the deviation between the instantaneous vertical trajectory and the prescribed one. Under the control system’s operation, as shown in
Figure 14,
Figure 15 and
Figure 16, the oscillation amplitude of the shifting weight increased with the increasing submerged depth resulting in the increase in the pitching angle oscillation amplitude of the towed vehicle.
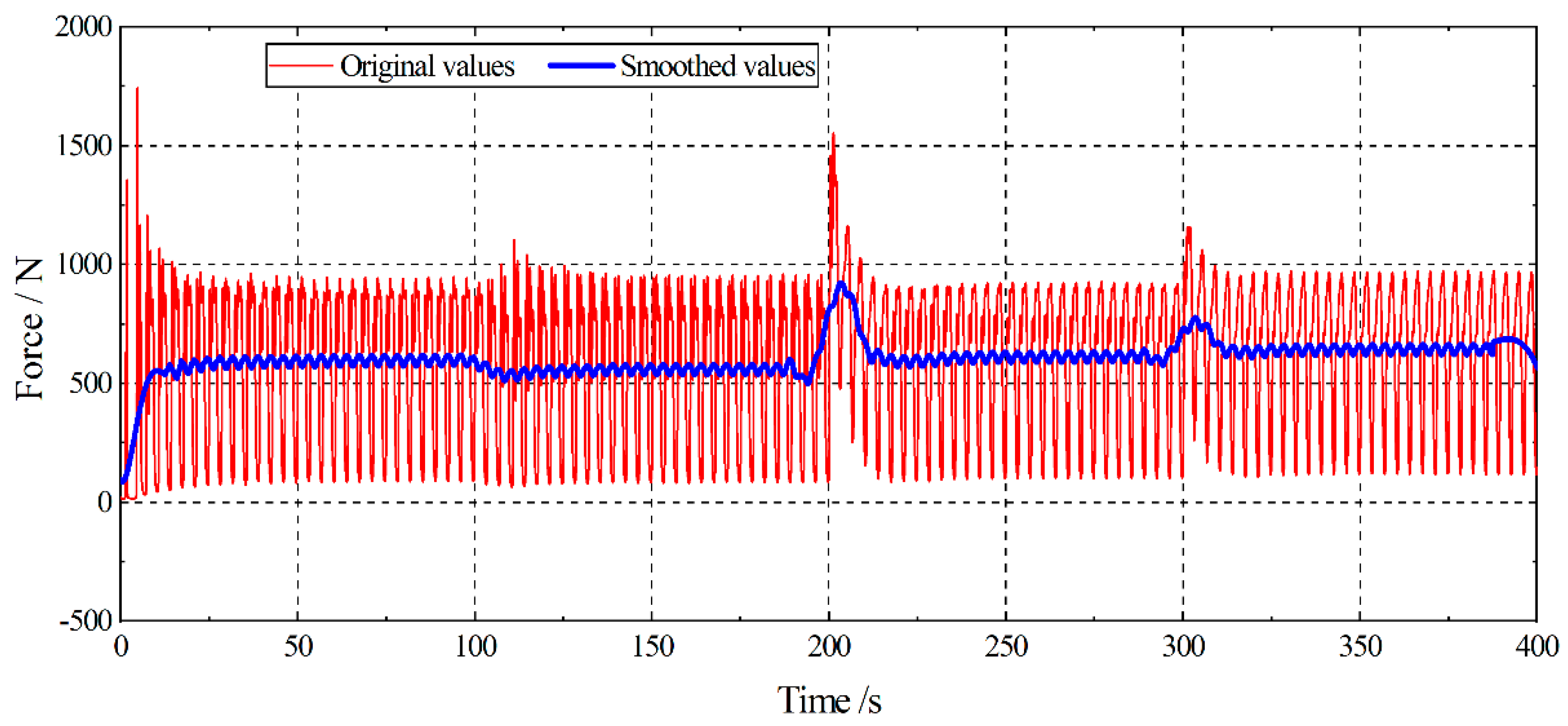
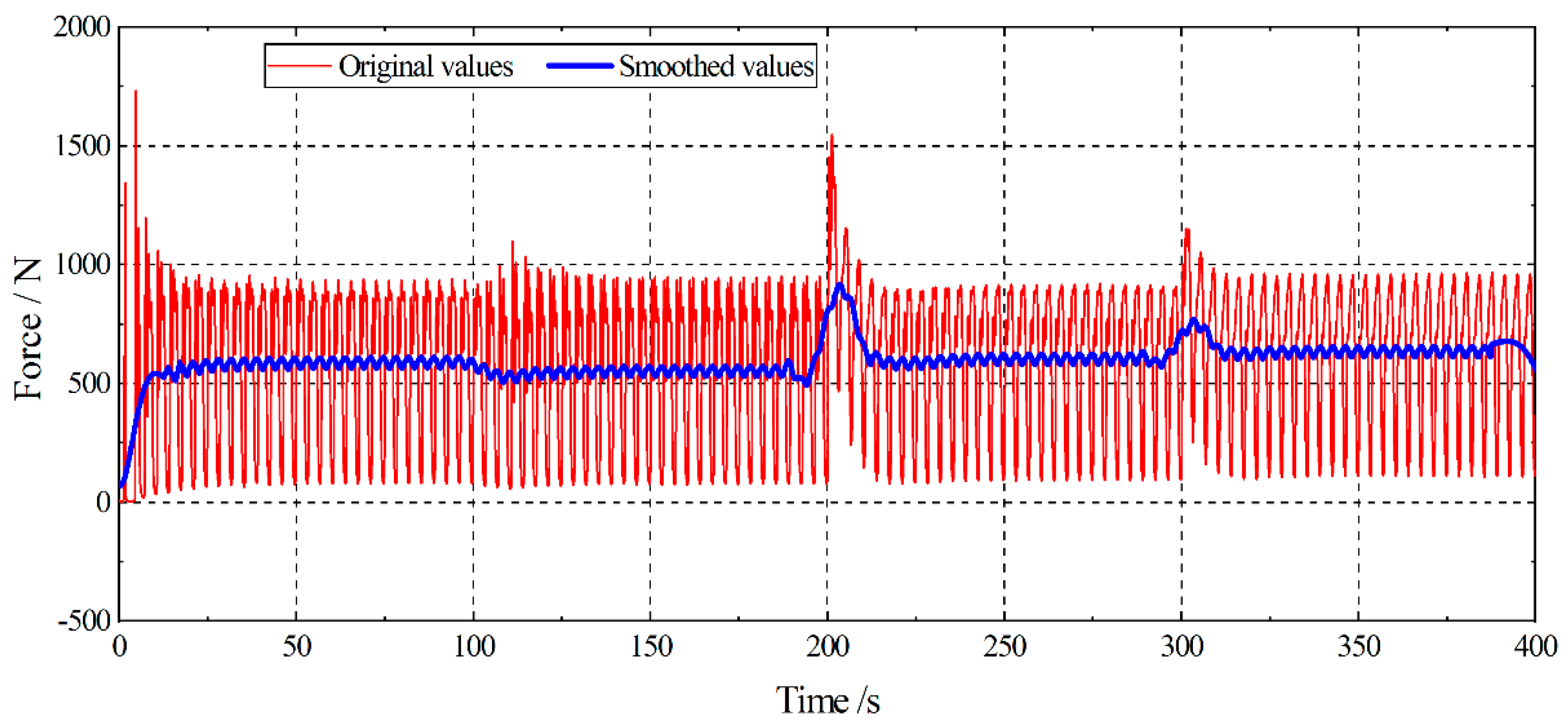
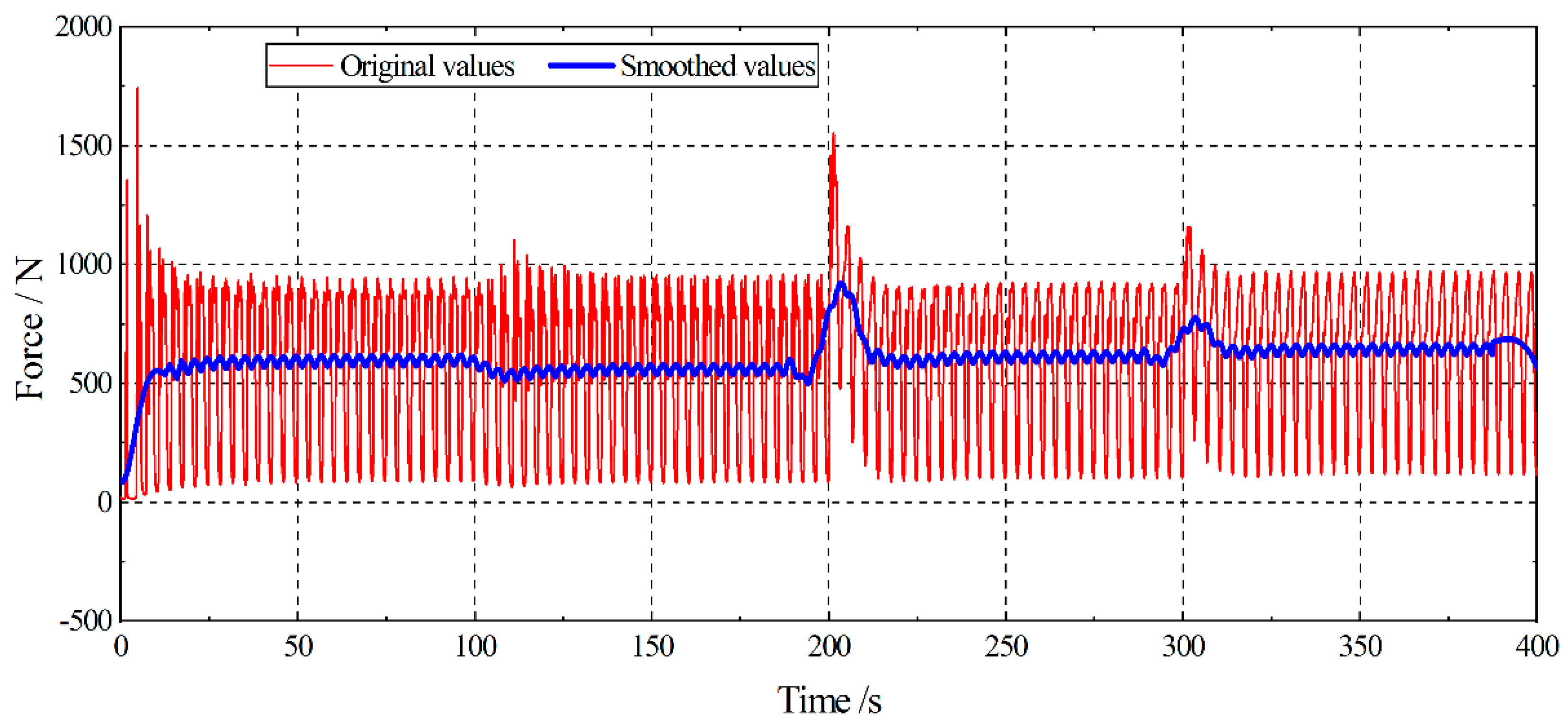
Figure 18 and
Figure 19 show the time histories of the tension at the connecting point P
t and towing point P
s of the towing cable, respectively. In order to better describe the change of towing cable tension in different stages, the 5th order Savitzky–Golay method was used to smooth the time histories of the tension. As is shown in
Figure 18 and
Figure 19, the tension at the connecting point P
t and towing point P
s vibrated with the disturbance in different stages in a period of about 3.6 s; the tension increased suddenly when the control stages were switched; as a result of that, the angle between the towing cable and the resistance changed due to the vertical position changes of the towed vehicle, and the tension of the towing cable changed accordingly. Specifically, the steady-state tension at the connecting point P
t and the towing point P
s of the towing cable in Stage Ⅰ, whose instantaneous position was above that of the non-control towing operation, decreased; on the contrary, the steady-state tensions at the connecting point P
t and the towing point P
s of Stage II and Stage III increased, and the steady-state tension of Stage III was greater due to a lower position. In addition, the result in the influence of the weight of the towing cable, the time-mean tension at the towing point P
s was slightly larger than that at the connecting point P
t. In general, as the submerged depth increased resulting from the decrease in the lift on the towed vehicle, the tensions at the upper and lower ends of the towing cable increased, and vice versa. It was caused by the changes of the position and attitude of the towed vehicle under the control operation. On the one hand, when the towed vehicle was at a lower position, the lift acting on it was smaller. The towing cable needed an additional force to balance the additional vertically downward lift, which led to the increase in the cable tension. On the other hand, the lower position was caused by a smaller lift, which means a larger pitching angle and a larger upstream cross-sectional area. The resistance, which is closely related to the upstream cross-sectional area, was greater. The greater the resistance, the greater the cable tension.
Figure 20 presents the time-mean value of the steady-state parameters of the underwater towed system at different stages. It shows the relationship among the longitudinal position of the shifting weight, the pitching angle, and the vertical position of the towed vehicle, the lift, and the resistance on the towed vehicle, and the tension of the towing cable in a summarized way. It can be seen from
Figure 20 that with the change of the longitudinal position
L of the shifting weight at different depth tracking stages, the pitching angle and the vertical position of the towed vehicle, the lift and the resistance on the towed vehicle, and the tension of the towing cable also changed accordingly. As mentioned above, under an automatic control of the control system, from the free towing stage to Stage I, the shifting weight III moved backward, the longitudinal angle of the towed vehicle decreased, the lift increased, the towed vehicle moved up, the tension of the towing cable decreased, and the resistance decreased; from Stage Ⅰ to Stage II, it was the other way round. Further, from Stage II to Stage III, the shifting weight moved further forward, the pitching angle of the towed vehicle increased, the lift decreased, the towed vehicle descended, the tension of the towed line increased, and the resistance increased.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}