
Real-Time Management of Vessel Carbon Dioxide Emissions Based on Automatic Identification System Database Using Deep Learning



Abstract
:1. Introduction
1.1. Greenhouse Gases (GHGs) of Vessels
1.2. Vessel Trajectory Prediction in Deep Learning
1.3. The Motivation of the Study
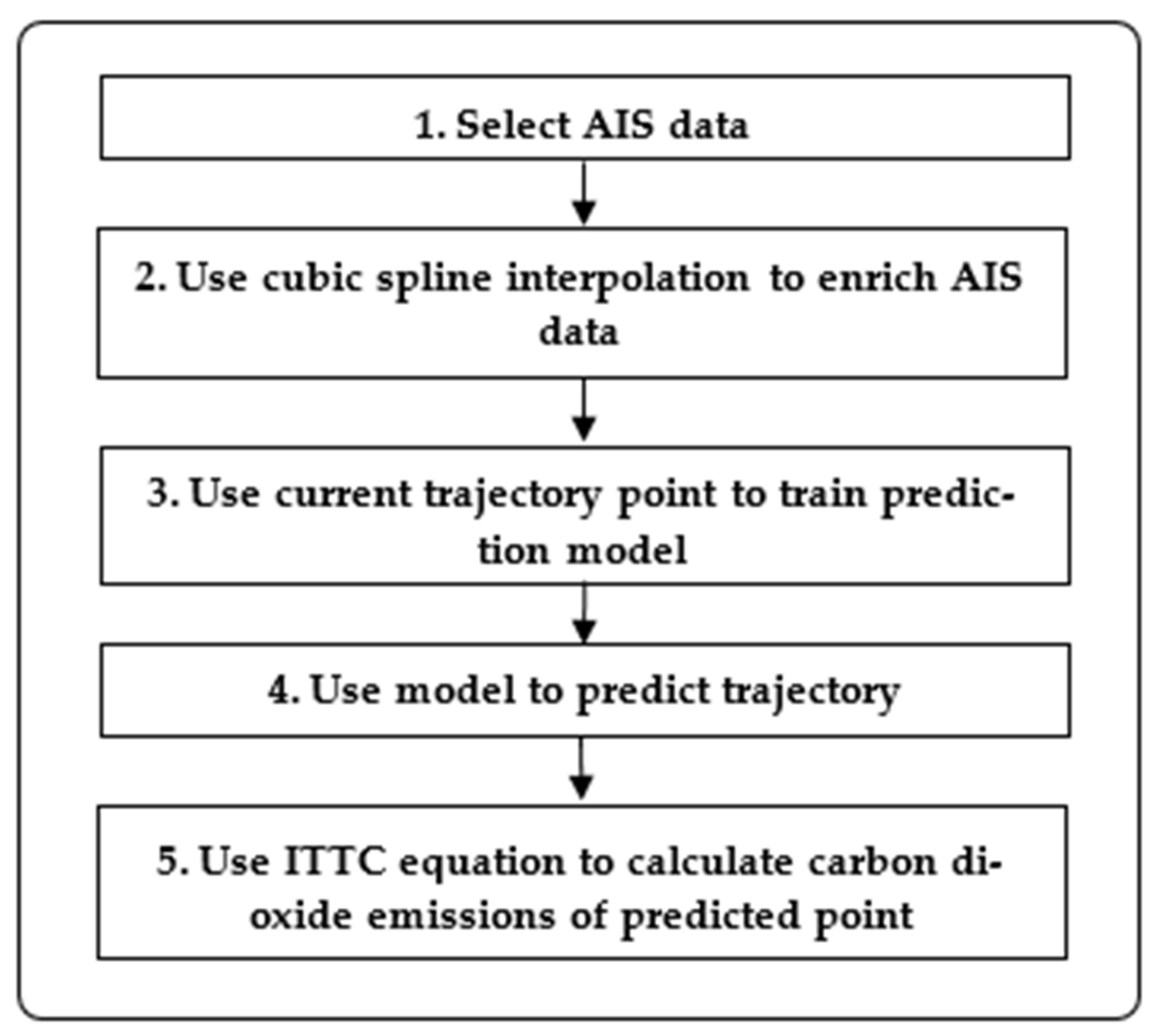
2. Equations of the Model
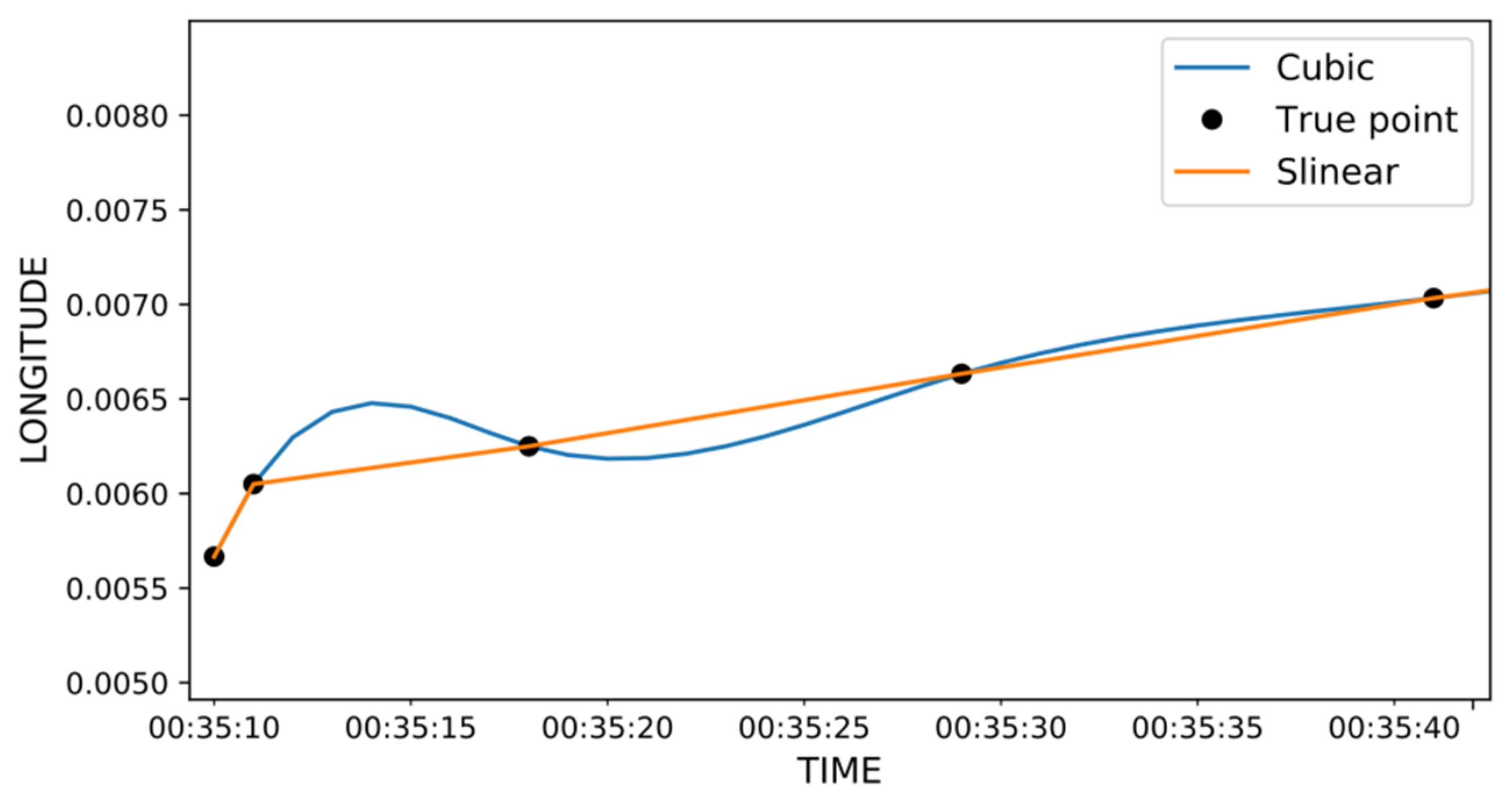
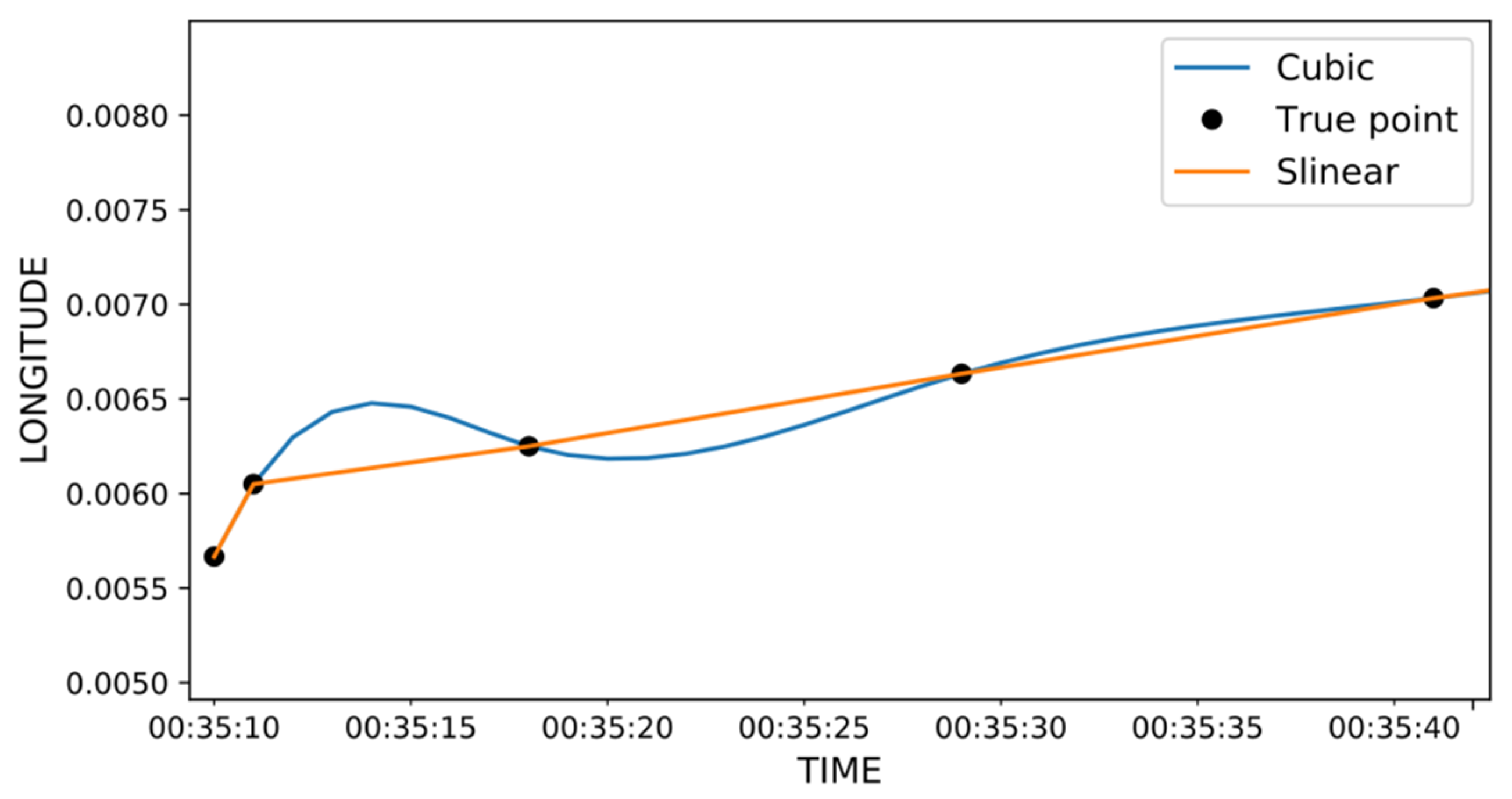
2.1. Cubic Spline Interpolation Model
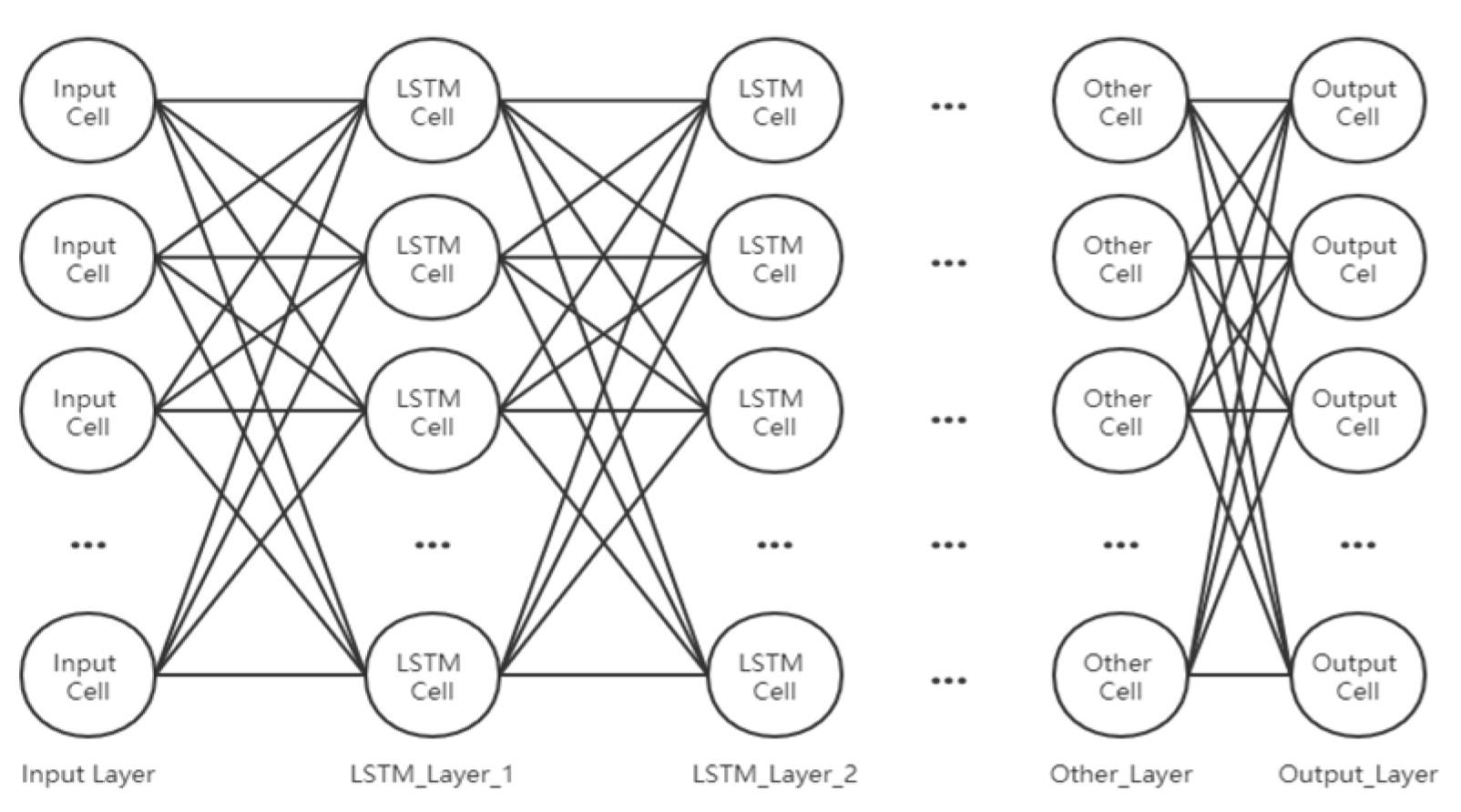
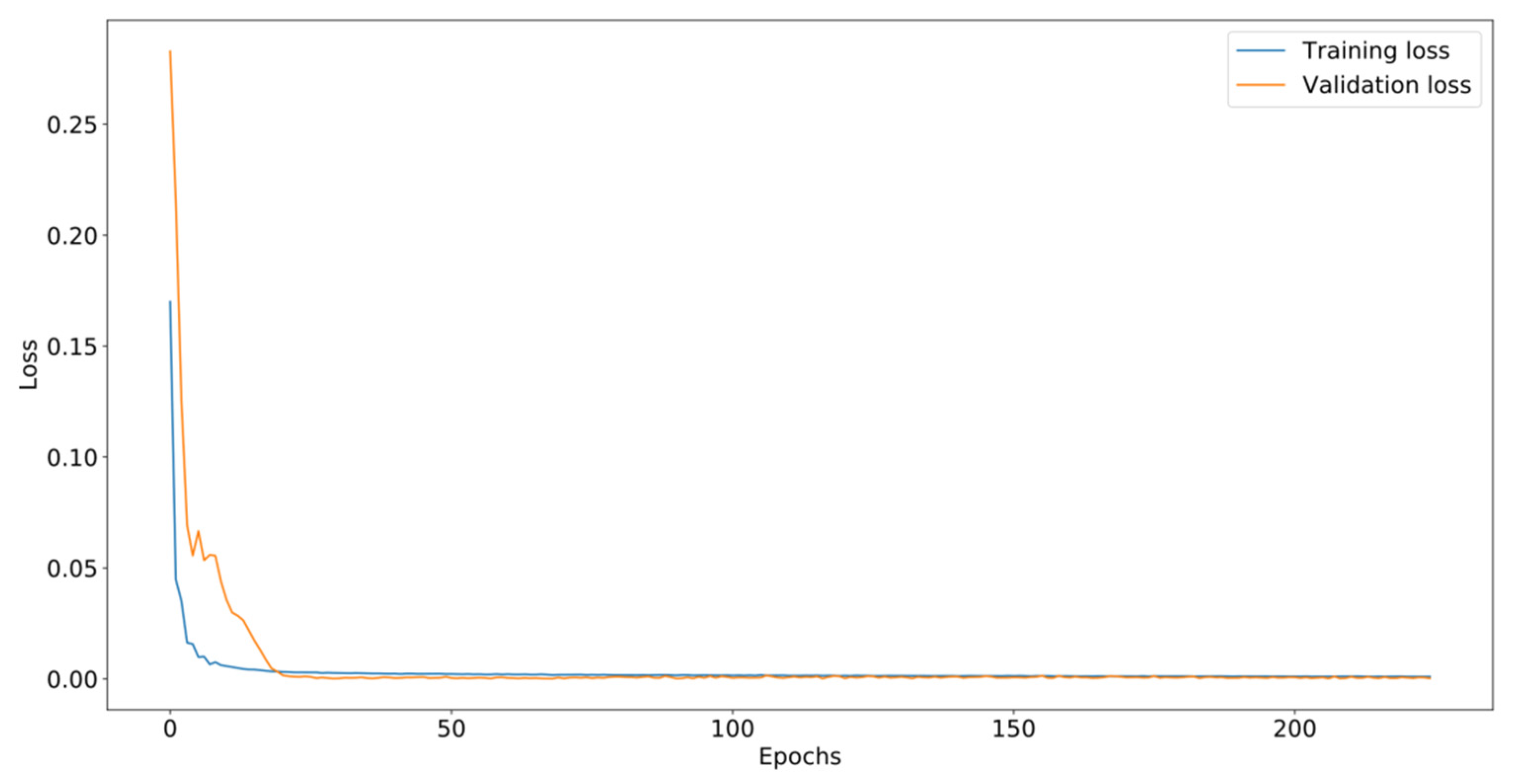
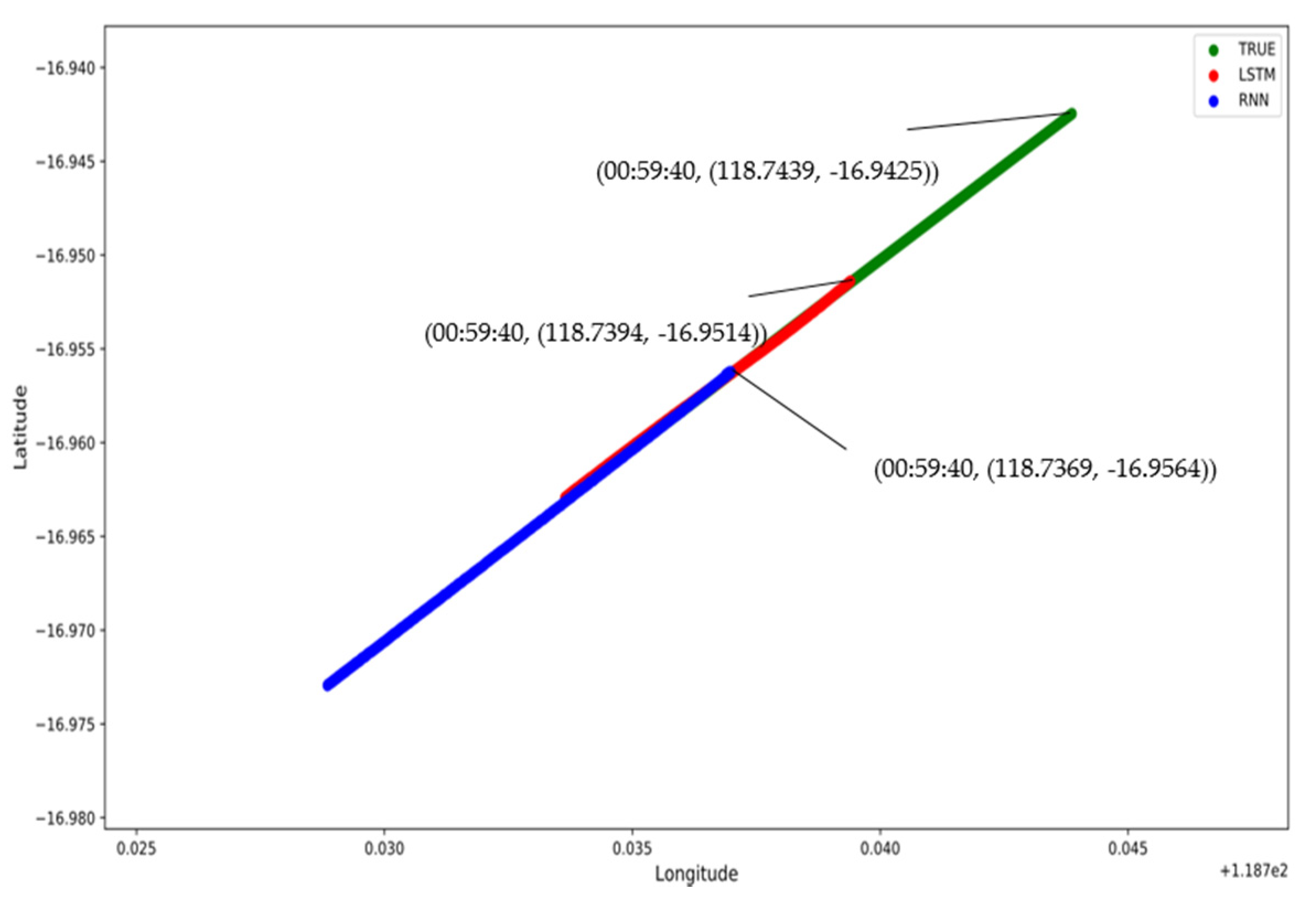
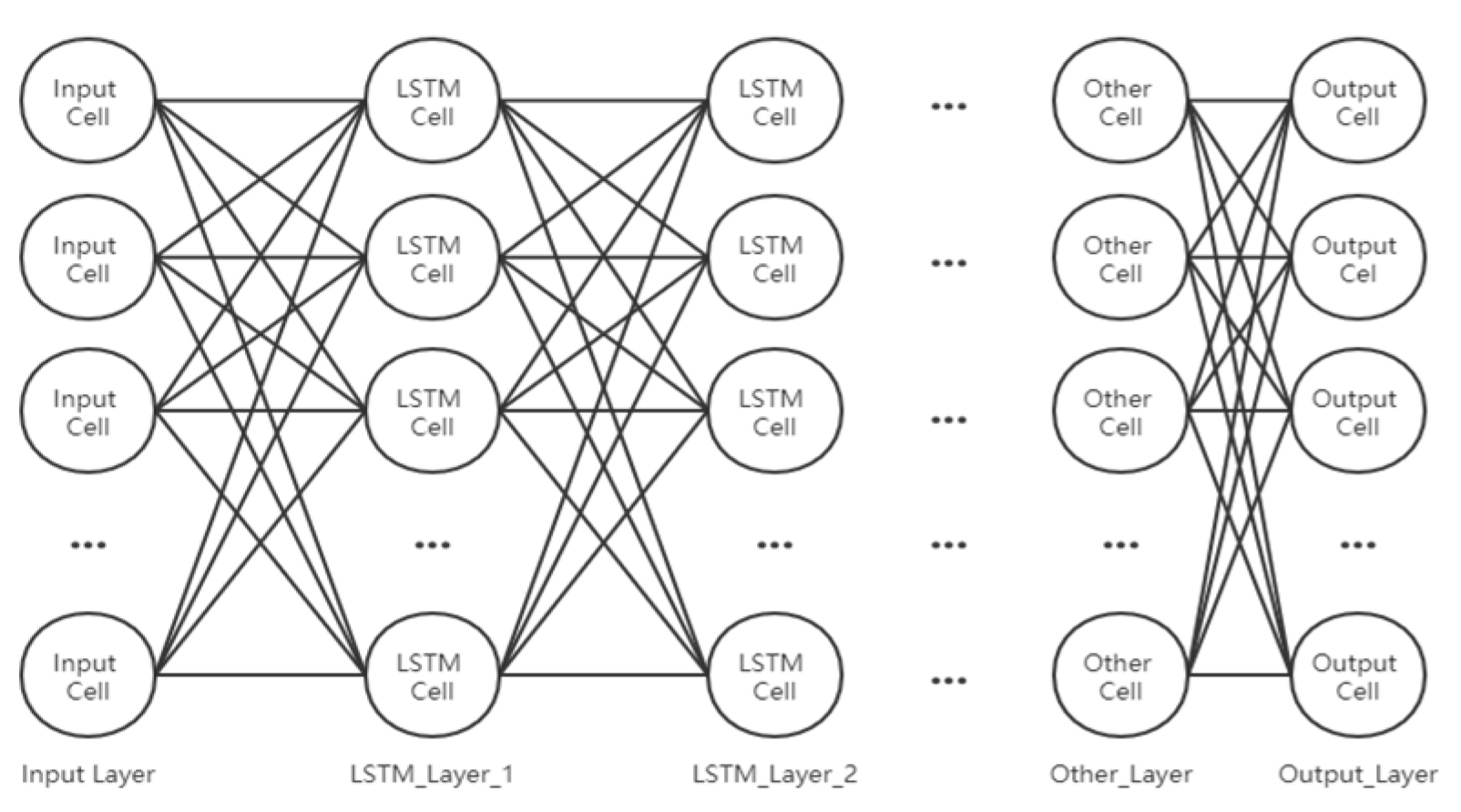
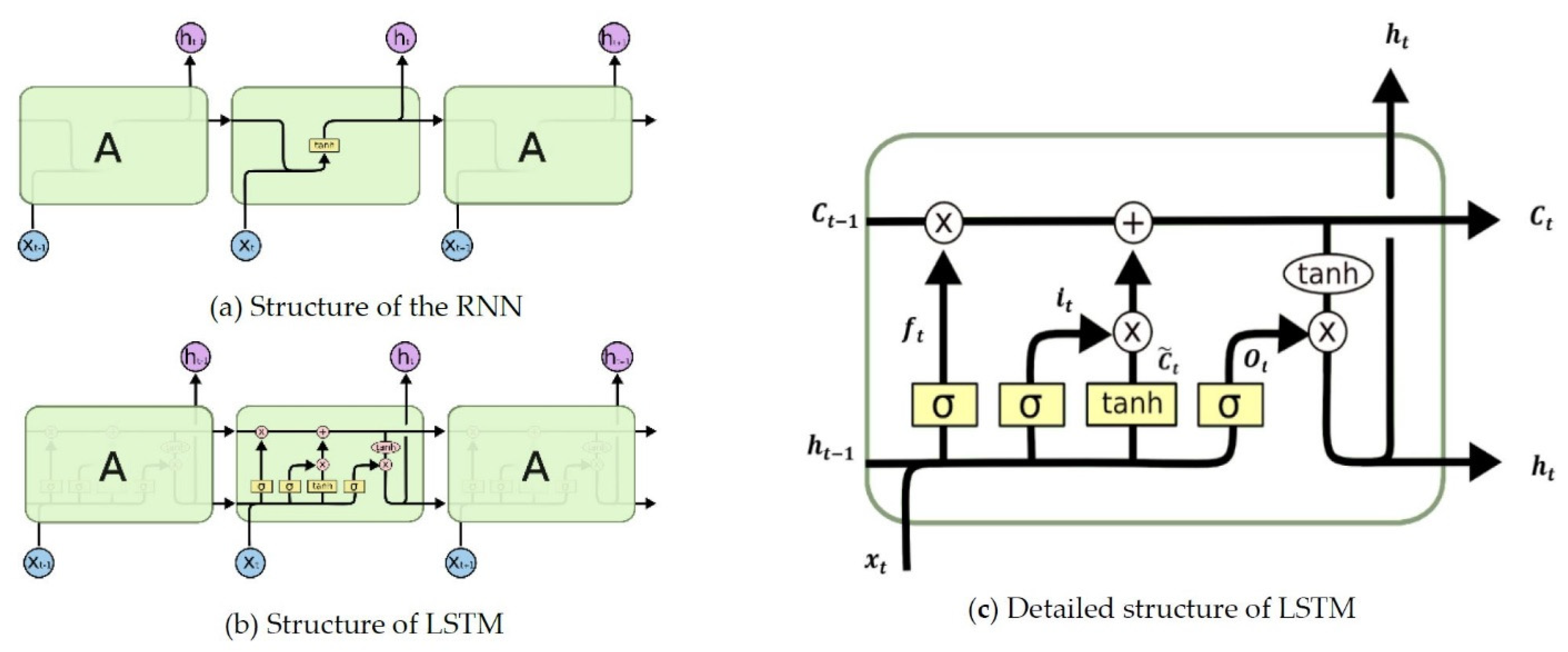
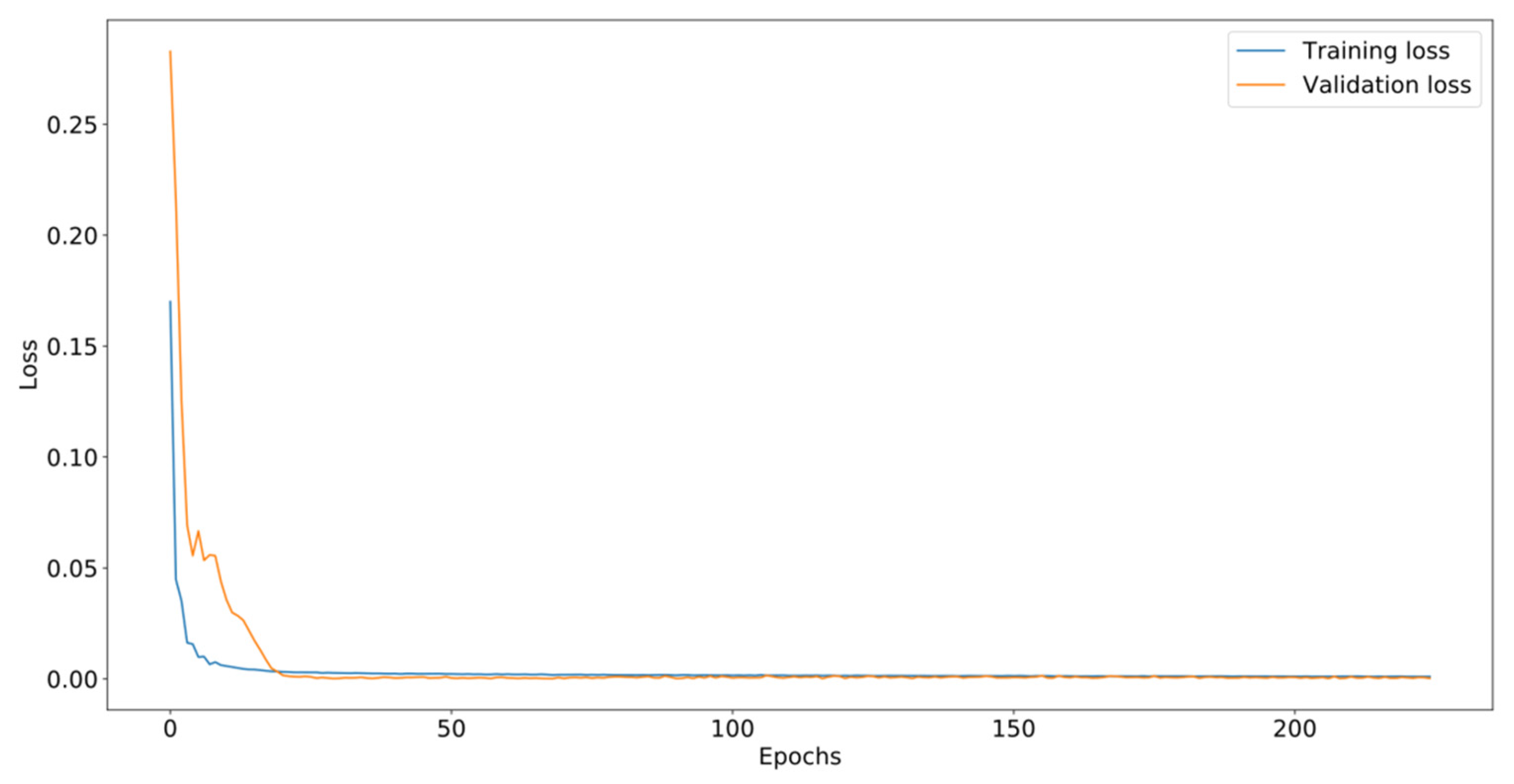
2.2. Long Short-Term Memory Model
2.3. Emission Estimation Model
3. Experiments and Results
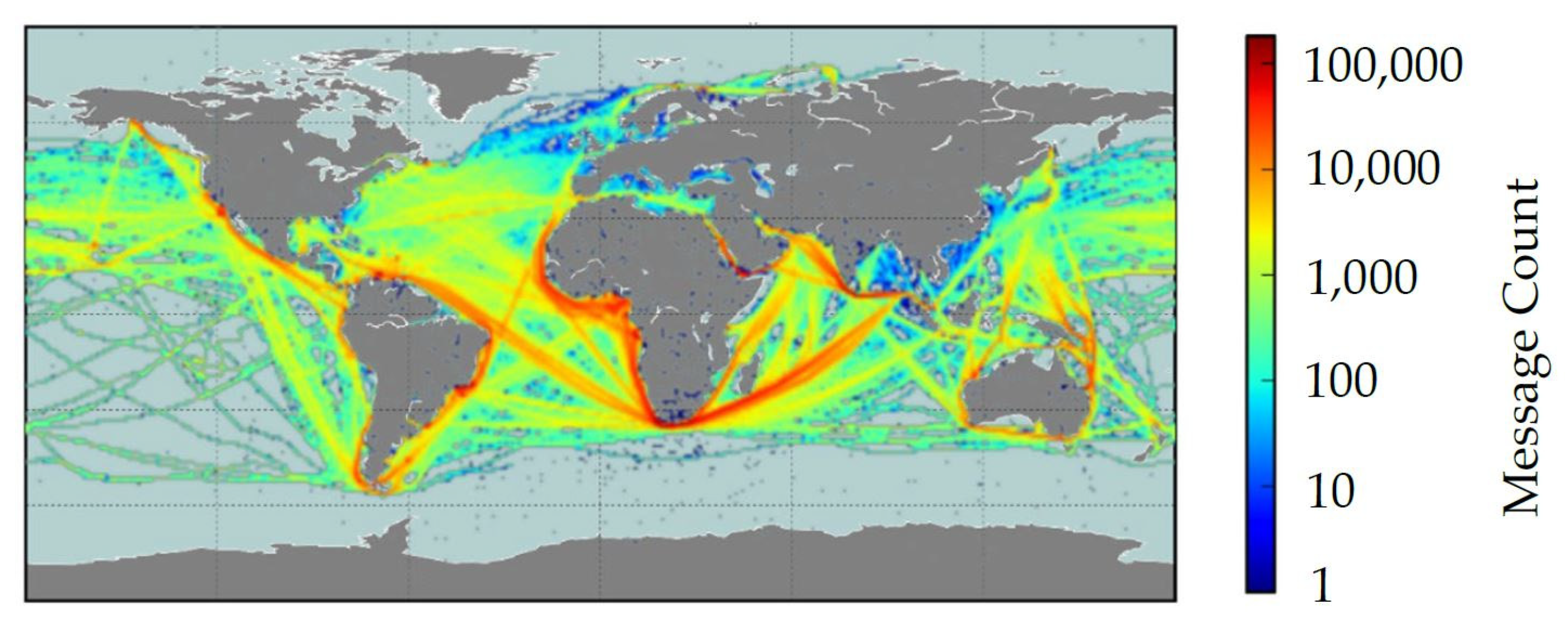
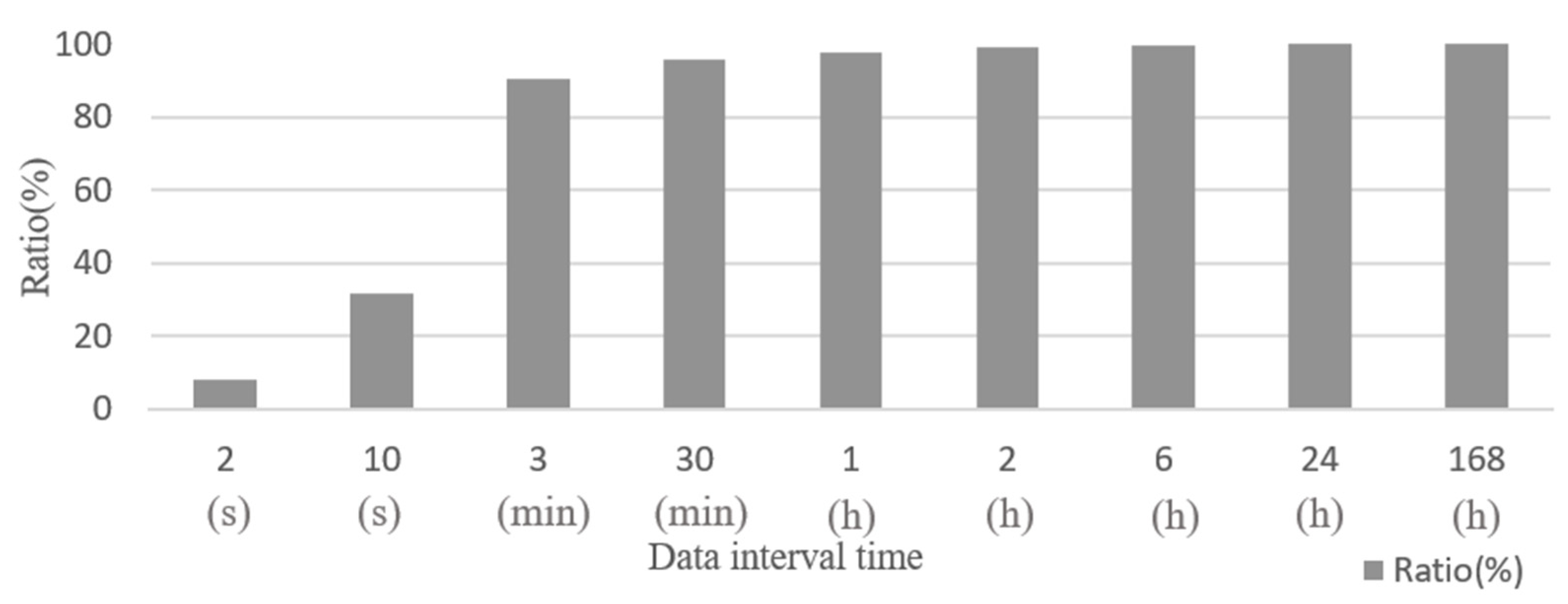
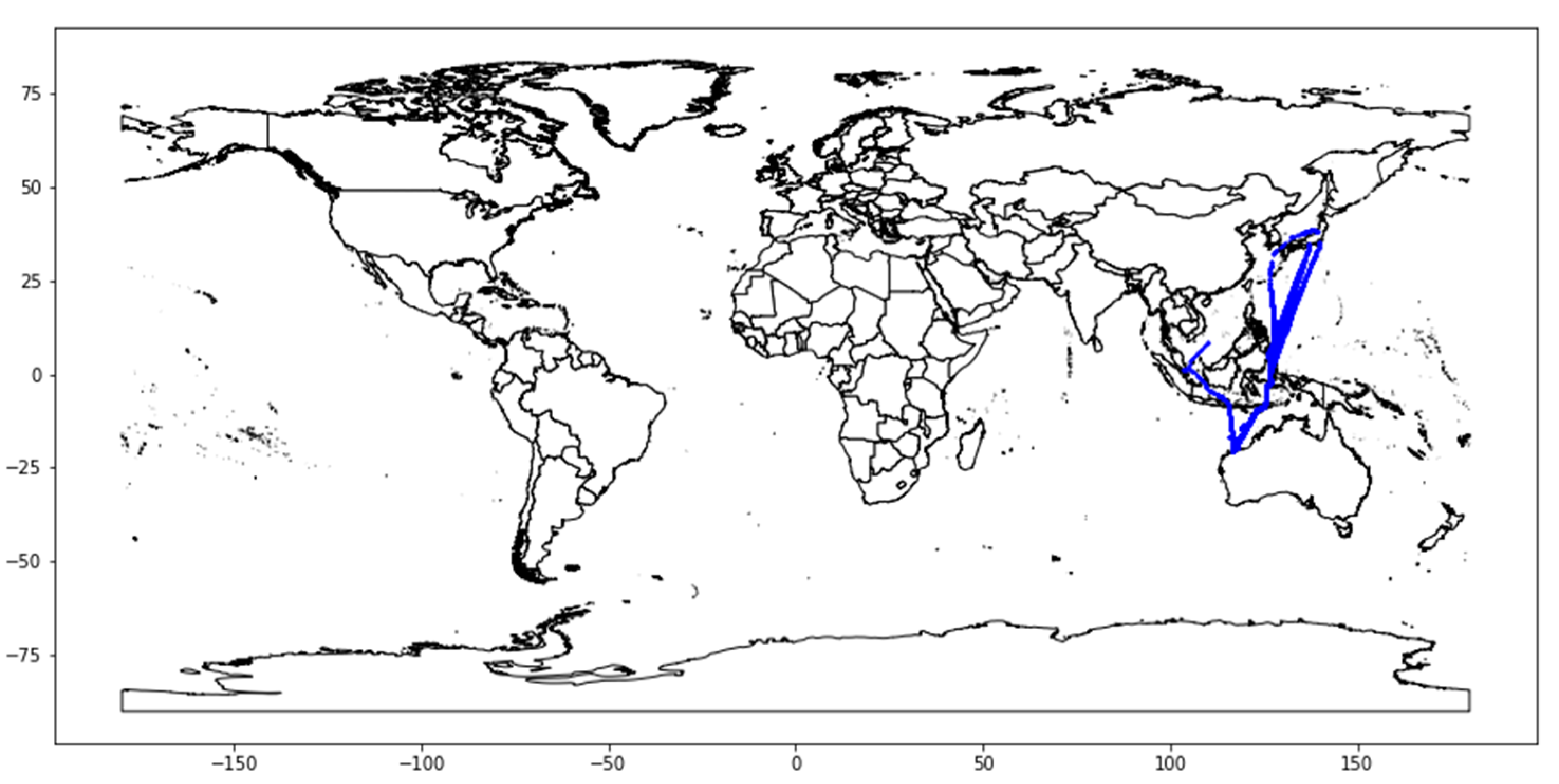
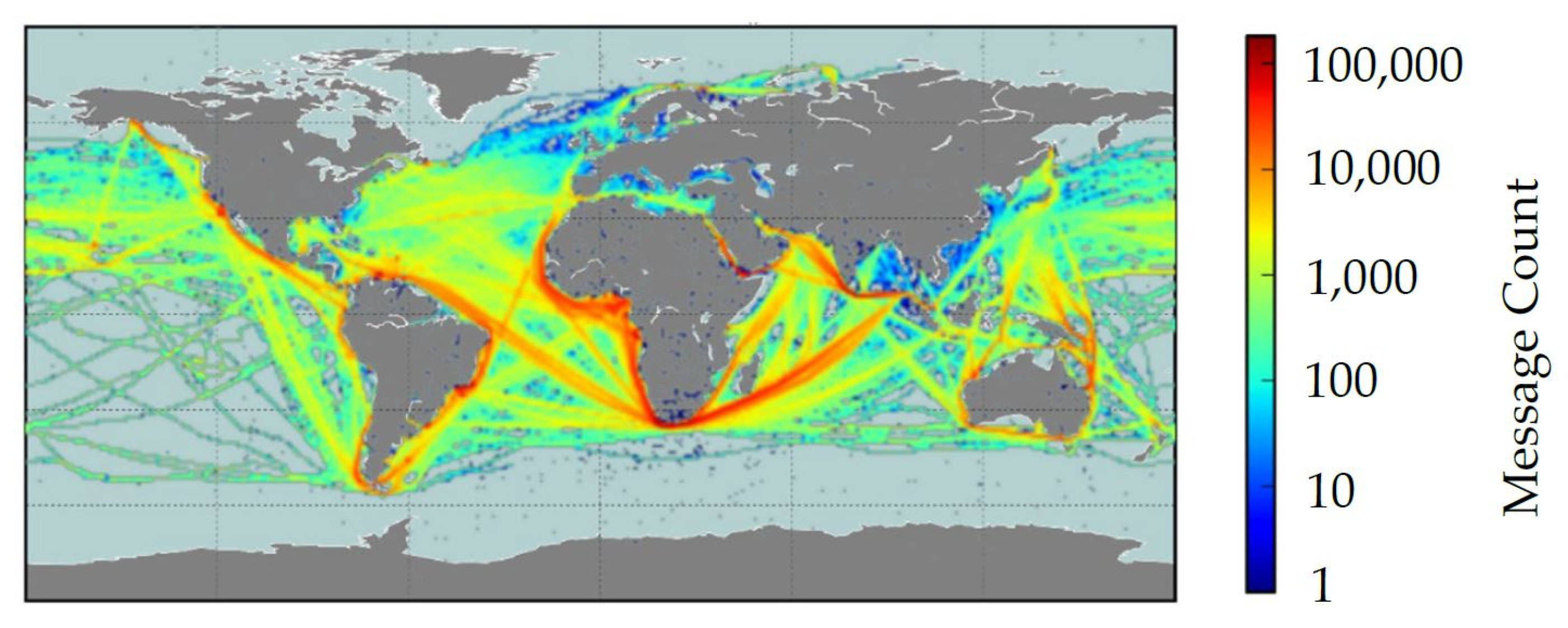
3.1. Automatic Identification System (AIS) Dataset Analysis
3.2. Interpolation Calculation
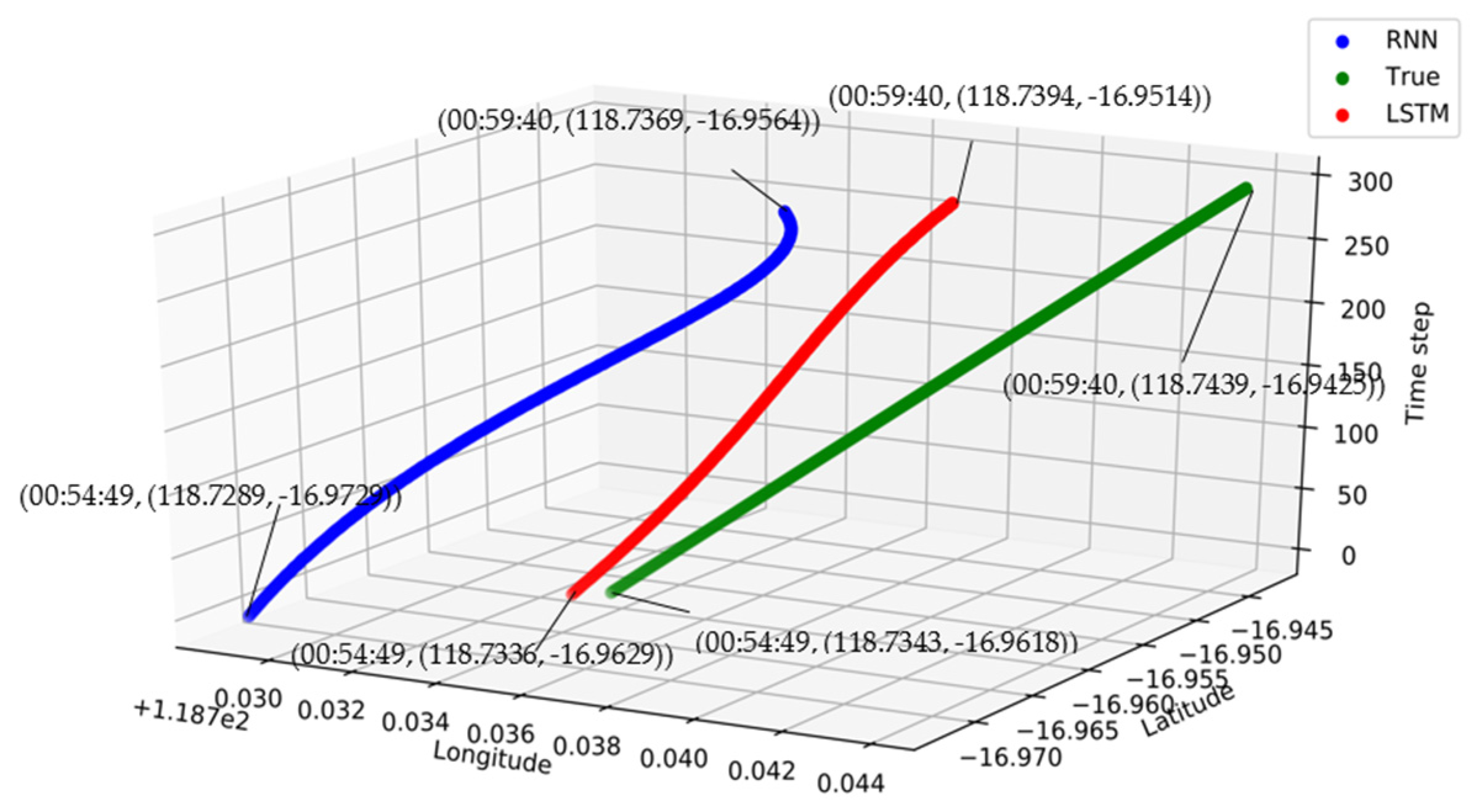
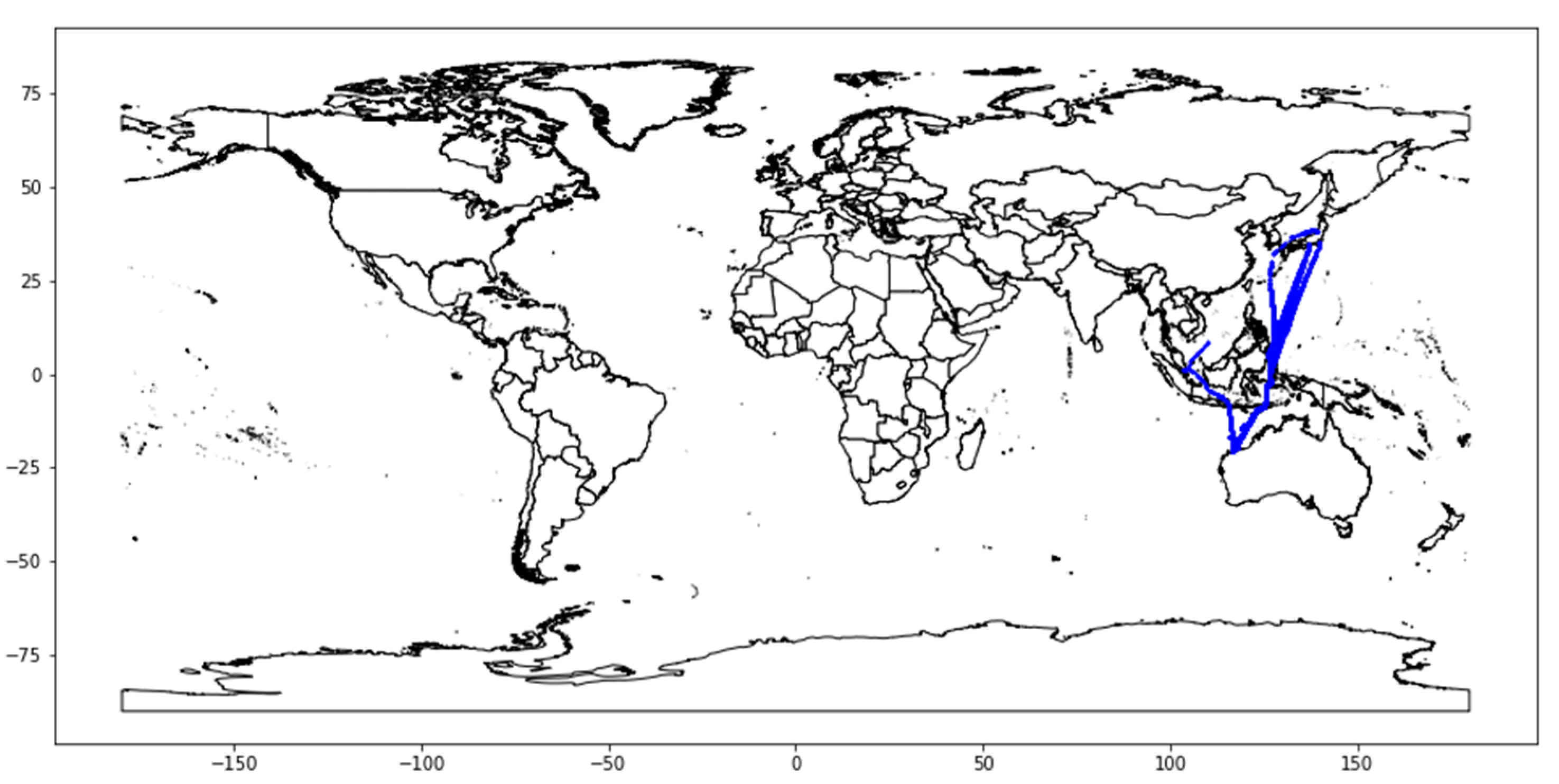
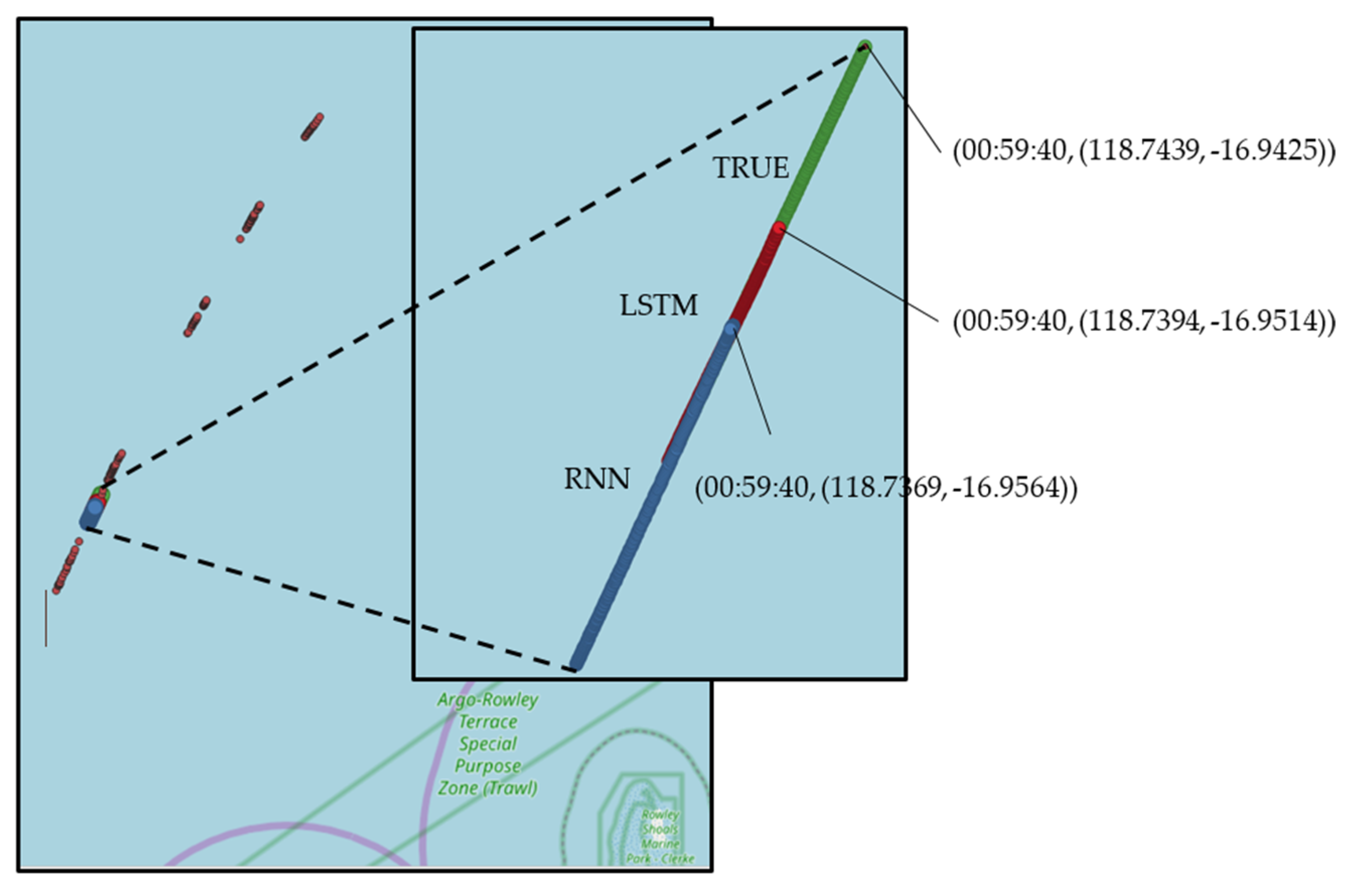
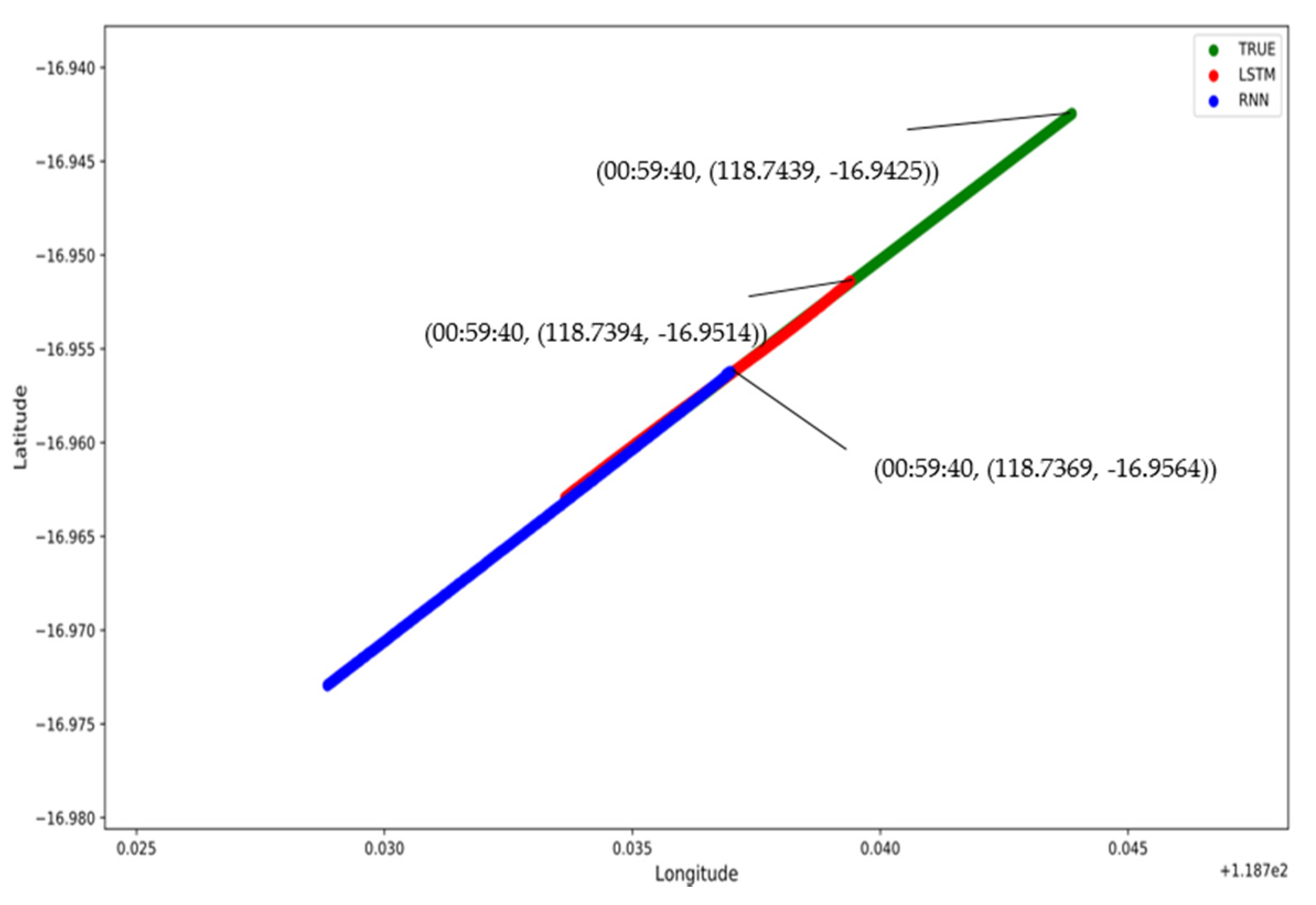
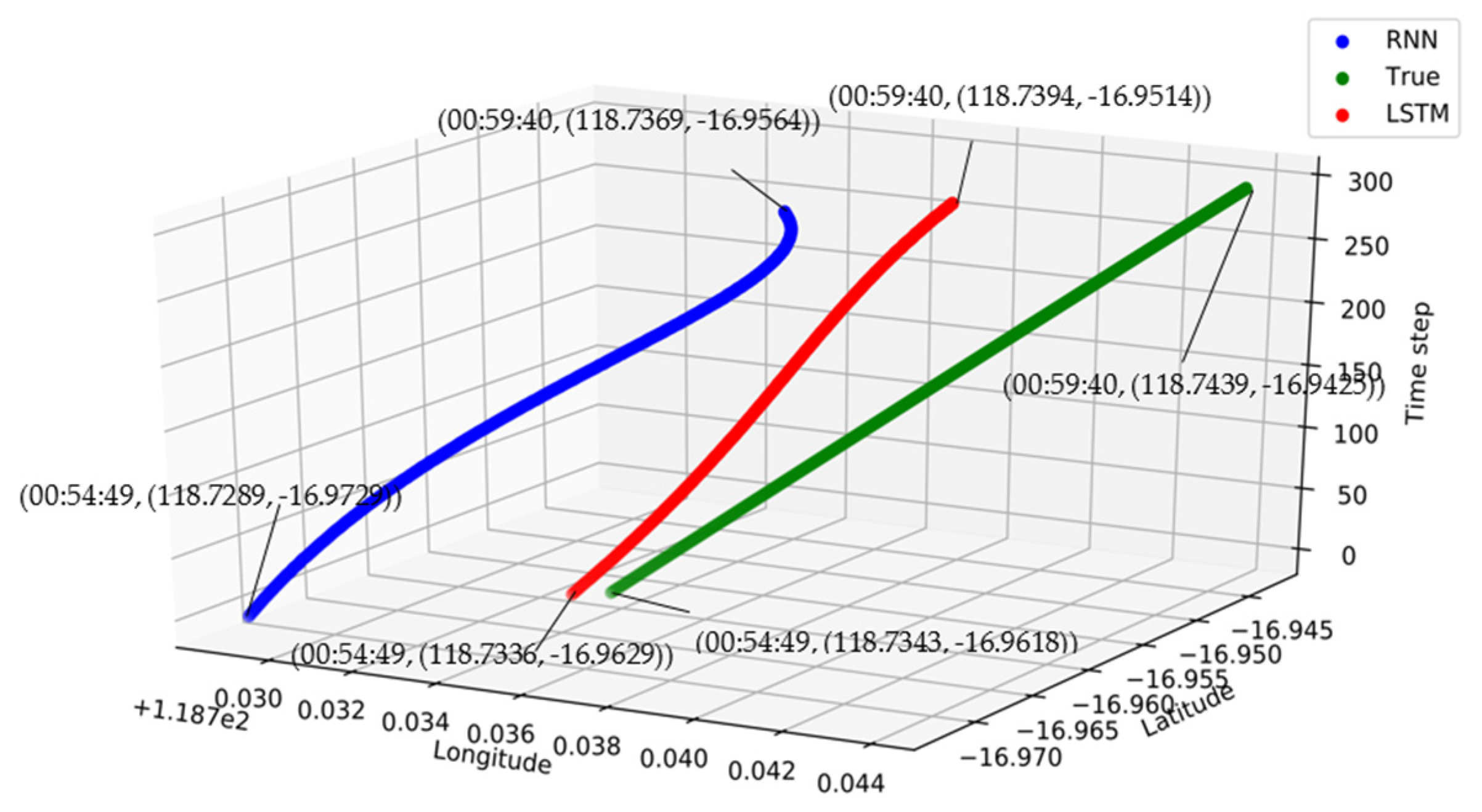
3.3. Vessel Trajectory Prediction
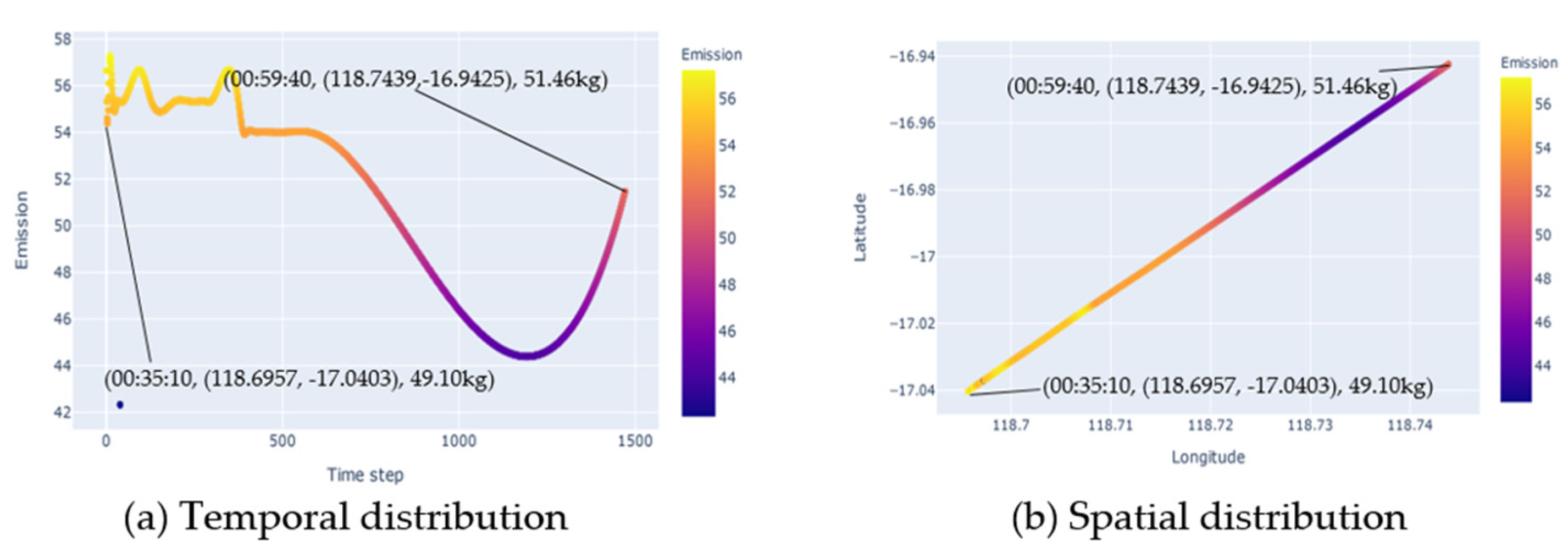
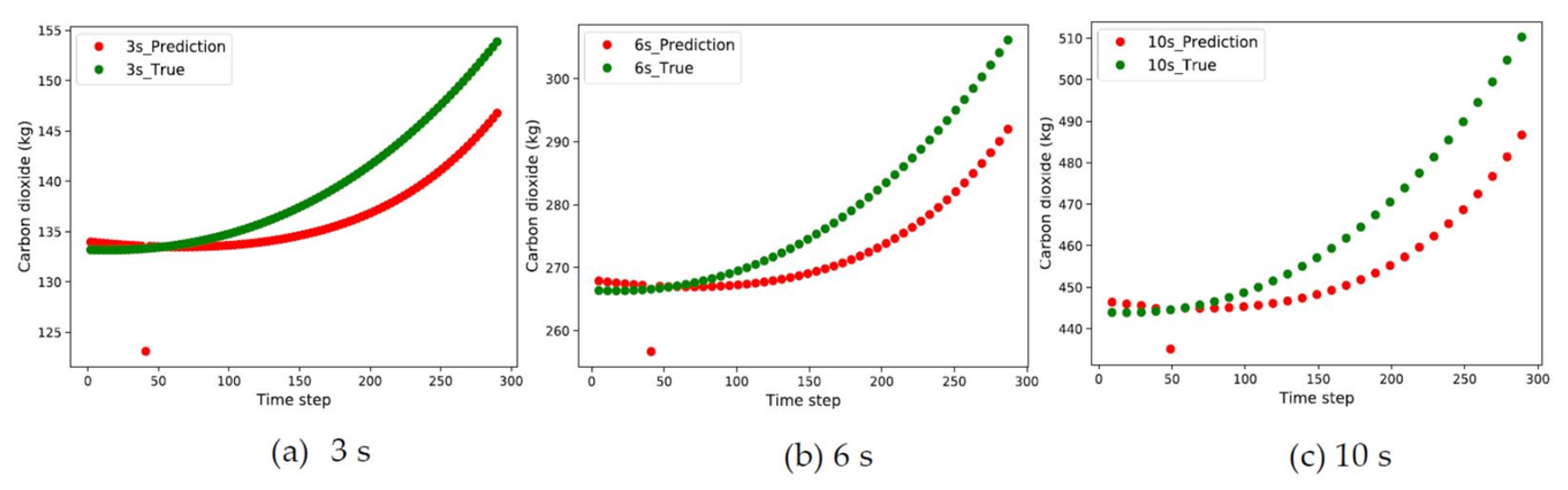
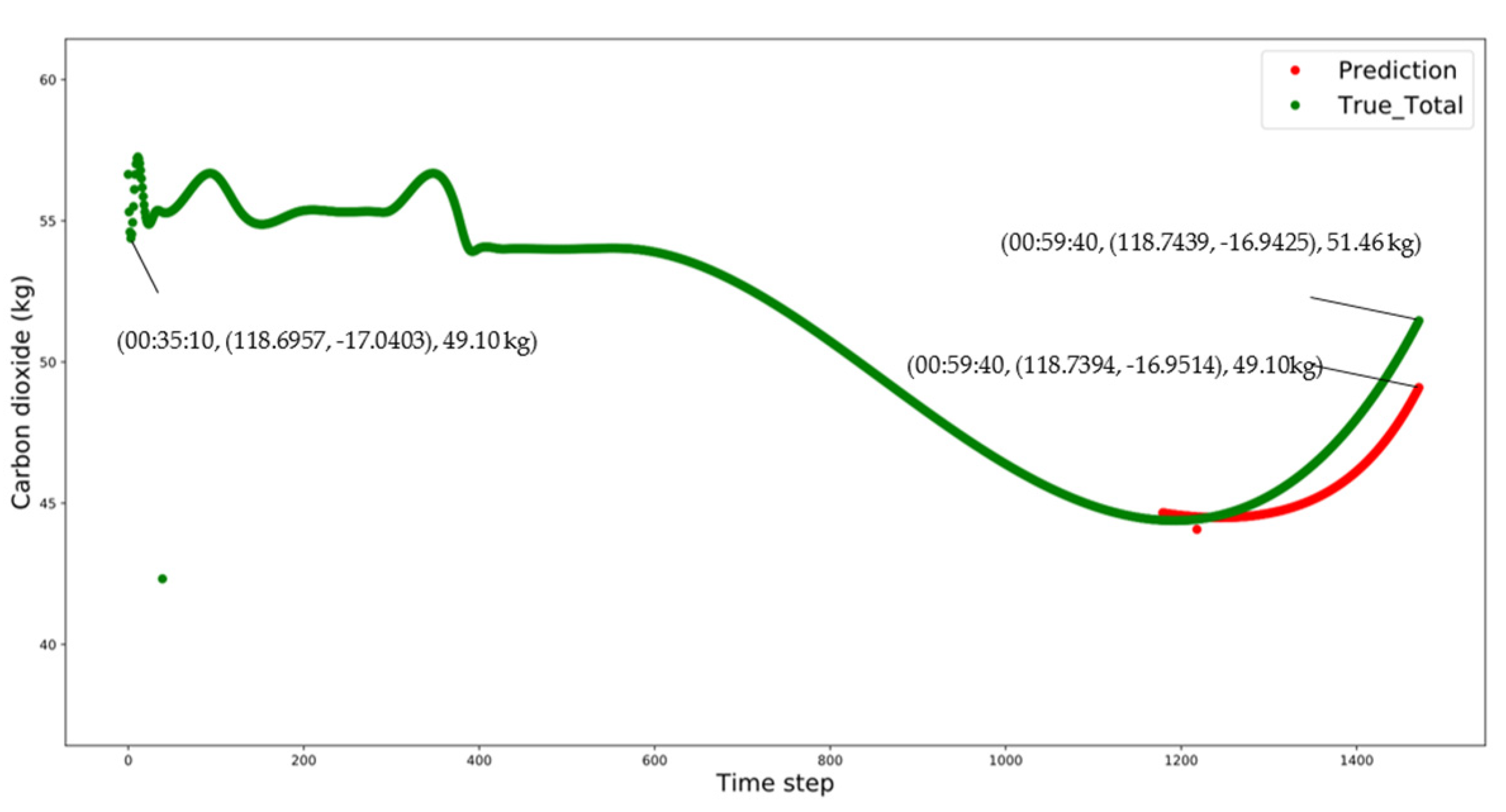
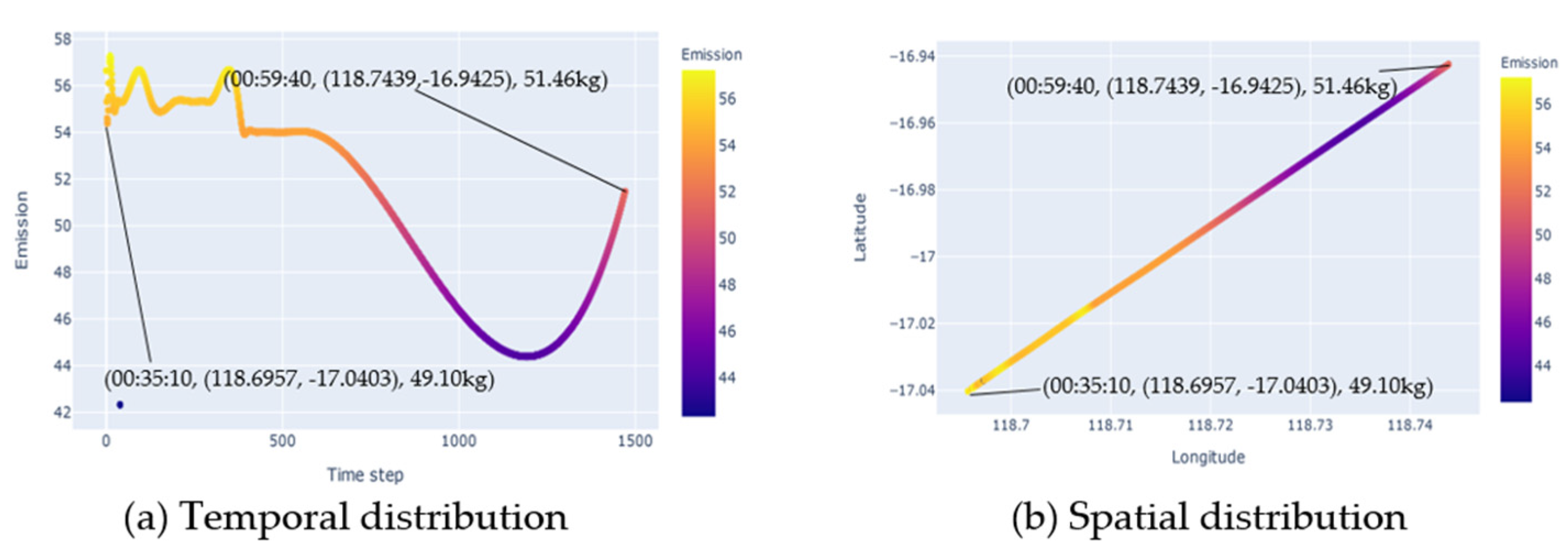
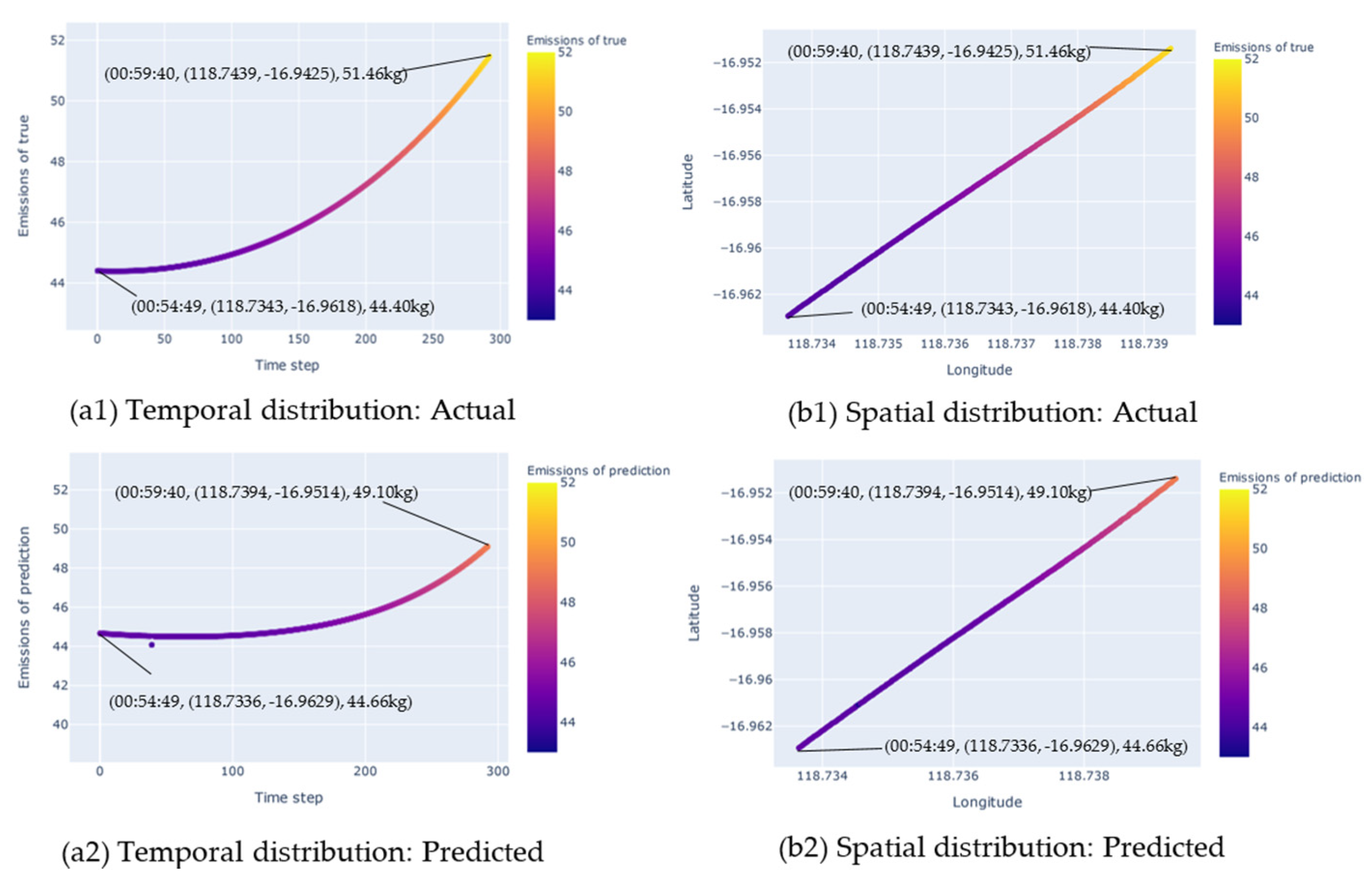
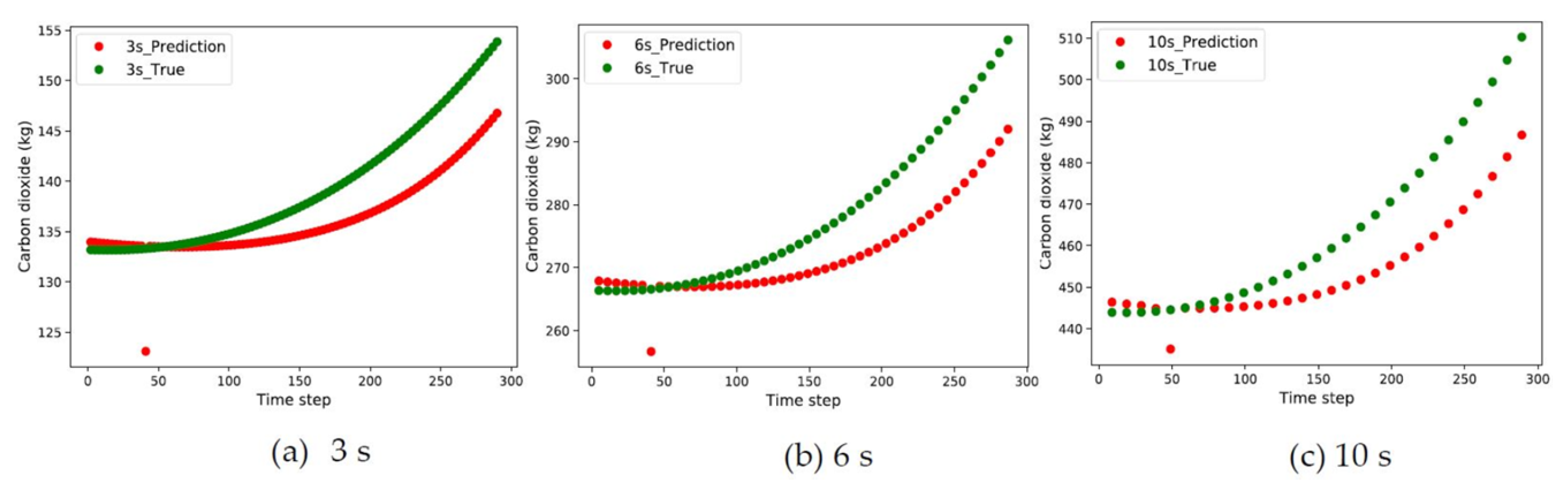
3.4. Carbon Dioxide Estimation
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mabunda, A.; Astito, A.; Hamdoune, S. Estimating Carbon Dioxide and Particulate Matter Emissions from Ships using Automatic Identification System Data. Int. J. Comput. Appl. 2014, 88, 27–31. [Google Scholar]
- Winther, M.; Christensen, J.H.; Plejdrup, M.S.; Ravn, E.S.; Eriksson, O.F.; Kristensen, H.O. Emission inventories for ships in the arctic based on satellite sampled AIS data. Atmos. Environ. 2014, 91, 1–14. [Google Scholar] [CrossRef]
- International Maritime Organization (IMO). MEPC 75/7/15: Reduction of GHG Emissions from Ships: Fourth IMO GHG Study 2020—Final Report; International Maritime Organization (IMO): London, UK, 2020. [Google Scholar]
- Coello, J.; Williams, I.; Hudson, D.A.; Kemp, S. An AIS-based approach to calculate atmospheric emissions from the UK fishing fleet. Atmos. Environ. 2015, 114, 1–7. [Google Scholar] [CrossRef]
- Yao, X.; Mou, J.; Chen, P.; Zhang, X. Ship emission inventories in estuary of the Yangtze River using terrestrial AIS data. TransNav 2016, 10, 633–640. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.H.; Wang, W.X.; Shi, X. AIS data-based ship emission estimation model and real ship verification. J. Shanghai Marit. Univ. 2019, 40, 12–16. [Google Scholar]
- Kim, H.; Watanabe, D.; Toriumi, S.; Hirata, E. Spatial Analysis of an Emission Inventory from Liquefied Natural Gas Fleet Based on Automatic Identification System Database. Sustainability 2021, 13, 1250. [Google Scholar] [CrossRef]
- Laxhammar, R.; Falkman, G.; Sviestins, E. Anomaly detection in sea traffic—A comparison of the Gaussian Mixture Model and the Kernel Density Estimator. In Proceedings of the 12th International Conference on Information Fusion, Seattle, WA, USA, 6–9 July 2009; pp. 756–763. [Google Scholar]
- Zhao, S.B.; Tang, C.; Liang, S.; Wang, D. Track prediction of vessel in controlled waterway based on improved Kalman filter. J. Comput. Appl. 2012, 32, 3247–3250. [Google Scholar] [CrossRef]
- Quan, B.; Yang, B.; Guo, C.; Li, Q. Prediction Model of Ship Trajectory Based on LSTM. Comput. Sci. 2018, 45, 126–131. [Google Scholar]
- Nguyen, D.D.; Le Van, C.; Ali, M.I. Vessel trajectory prediction using sequence-to-sequence models over spatial grid. In Proceedings of the 12th ACM International Conference on Distributed and Event-based Systems, Hamilton, New Zealand, 25–29 June 2018; pp. 258–261. [Google Scholar]
- Ljunggren, H. Using Deep Learning for Classifying Ship Trajectories. In Proceedings of the 21st International Conference on Information Fusion (FUSION), Cambridge, UK, 10–13 July 2018; pp. 2158–2164. [Google Scholar]
- Wang, L.L.; Liu, J. Ship behavior recognition method based on multi-scale convolution. J. Comput. Appl. 2019, 39, 3691–3696. [Google Scholar]
- Theodoropoulos, P.; Spandonidis, C.C.; Themelis, N.; Giordamlis, C.; Fassois, S. Evaluation of Different Deep-Learning Models for the Prediction of a Ship’s Propulsion Power. J. Mar. Sci. Eng. 2021, 9, 116. [Google Scholar] [CrossRef]
- Theodoropoulos, P.; Spandonidis, C.C.; Giordamlis, C.; Fassois, S. Stability and Safety of Ships and Ocean Vehicles Enhancing vessel ’s operational safety using Convolutional Neural Networks and Big Data techniques. In Proceedings of the 1st International Conference on the Stability and Safety of Ships and Ocean Vehicles (STAB&S), Online, Glasgow, UK, 6–11 June 2021. [Google Scholar]
- Bartels, R.; Beatty, J.; Barsky, B. Hermite and Cubic Spline Interpolation: Chapter 3. In An Introduction to Splines for Use in Computer Graphics and Geometric Modelling; Morgan Kaufmann: Burlington, MA, USA, 1995; pp. 9–17. [Google Scholar]
- Hochreiter, S.; Schmidhuber, J. Long Short-Term Memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- Olah, C. Understanding LSTM Networks. 2015. Available online: https://colah.github.io/posts/2015-08-Understanding-LSTMs/ (accessed on 7 August 2021).
- International Towing Tank Conference. ITTC—Recommended Procedures and Guidelines; Procedure 7.5-02-02-01, Revision 04; ITTC Association: Zürich, Switzerland, 2017. [Google Scholar]
- Molland, A.F.; Turnock, S.R.; Hudson, D.A. Ship Resistance and Propulsion: Practical Estimation of Ship Propulsive Power, 2nd ed.; Cambridge University Press: Cambridge, UK, 2017. [Google Scholar]
- Smith, T.W.P.; Jalkanen, J.P.; Anderson, B.A.; Corbett, J.J.; Faber, J.; Hanayama, S.; O’Keeffe, E.; Parker, S.; Johansson, L.; Aldous, L.; et al. Third IMO GHG Study 2014; International Maritime Organization: London, UK, 2015. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Engine Age | Slow-Speed Diesel (SSD) Engine | Medium-Speed Diesel (MSD) Engine | High-Speed Diesel (HSD) Engine |
|---|---|---|---|
| Before 1983 | 205 | 215 | 225 |
| 1984–2000 | 185 | 195 | 205 |
| Post–2001 | 175 | 185 | 195 |
| Items | Hour | Minutes | Seconds |
|---|---|---|---|
| Count (number) | 9,072,291 | 9,072,291 | 9,072,291 |
| Mean | 0.14 | 8.68 | 520.52 |
| 25% | 0.00 | 0.10 | 6.00 |
| 50% | 0.00 | 0.28 | 17.00 |
| 75% | 0.01 | 0.70 | 42.00 |
| MMSI | Time | Longitude | Latitude | SOG | COG |
|---|---|---|---|---|---|
| 310028000 | 00:35:10 | 118.6957 | −17.0403 | 15.9 | 24.7 |
| 310028000 | 00:35:11 | 118.6961 | −17.0395 | 15.8 | 25.1 |
| 310028000 | 00:35:18 | 118.6963 | −17.0391 | 15.9 | 25.1 |
| 310028000 | 00:35:29 | 118.6966 | −17.0383 | 15.8 | 25 |
| 310028000 | 00:35:41 | 118.697 | −17.0375 | 15.8 | 24.8 |
| 310028000 | 00:35:48 | 118.6972 | −17.0371 | 15.8 | 25.2 |
| Items | Parameters | Items | Parameters |
|---|---|---|---|
| Base Learning Rate | 0.001 | LSTM_layer_1 | 256 |
| Optimizer | Adaptive moment estimation | LSTM_layer_2 | 128 |
| Epoch | 125 | Dropout_layer _1 | 128 |
| Batch size | 138 | Dense_layer _1 | 128 |
| Loss function | Mean square error | Dropout_layer _2 | 128 |
| Activation_1 | Tanh | Dense_layer _2 | 4 |
| Activation_2 | Linear | Kernel_initializer | Orthogonal |
| Train set | 938 | Validation set | 235 |
| Test set | 293 | - | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Watanabe, D.; Hirata, E.; Toriumi, S. Real-Time Management of Vessel Carbon Dioxide Emissions Based on Automatic Identification System Database Using Deep Learning. J. Mar. Sci. Eng. 2021, 9, 871. https://doi.org/10.3390/jmse9080871
Wang Y, Watanabe D, Hirata E, Toriumi S. Real-Time Management of Vessel Carbon Dioxide Emissions Based on Automatic Identification System Database Using Deep Learning. Journal of Marine Science and Engineering. 2021; 9(8):871. https://doi.org/10.3390/jmse9080871
Chicago/Turabian StyleWang, Yongpeng, Daisuke Watanabe, Enna Hirata, and Shigeki Toriumi. 2021. "Real-Time Management of Vessel Carbon Dioxide Emissions Based on Automatic Identification System Database Using Deep Learning" Journal of Marine Science and Engineering 9, no. 8: 871. https://doi.org/10.3390/jmse9080871
APA StyleWang, Y., Watanabe, D., Hirata, E., & Toriumi, S. (2021). Real-Time Management of Vessel Carbon Dioxide Emissions Based on Automatic Identification System Database Using Deep Learning. Journal of Marine Science and Engineering, 9(8), 871. https://doi.org/10.3390/jmse9080871