
Artificial Intelligence Application on Sediment Transport



Abstract
1. Introduction
2. Hydraulic Model Experiment
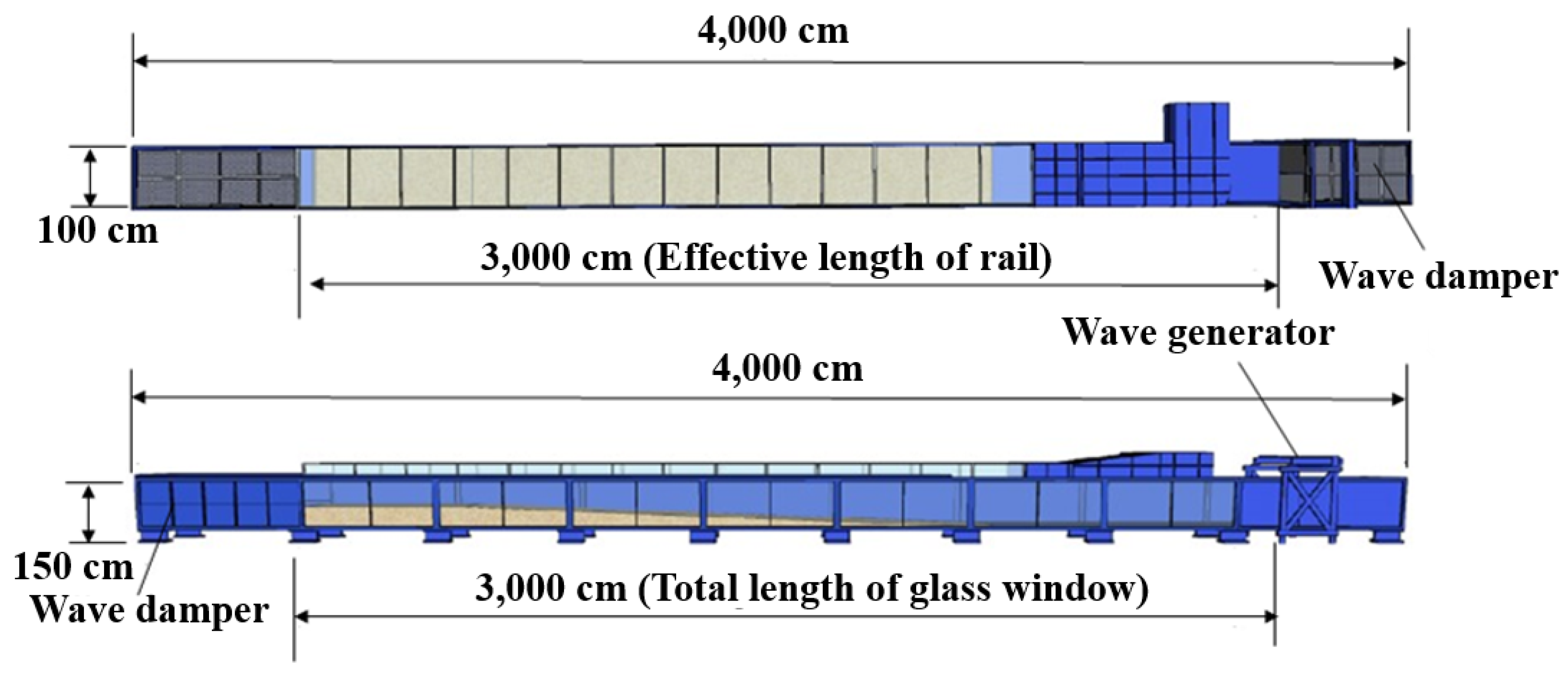
2.1. Experimental Setup
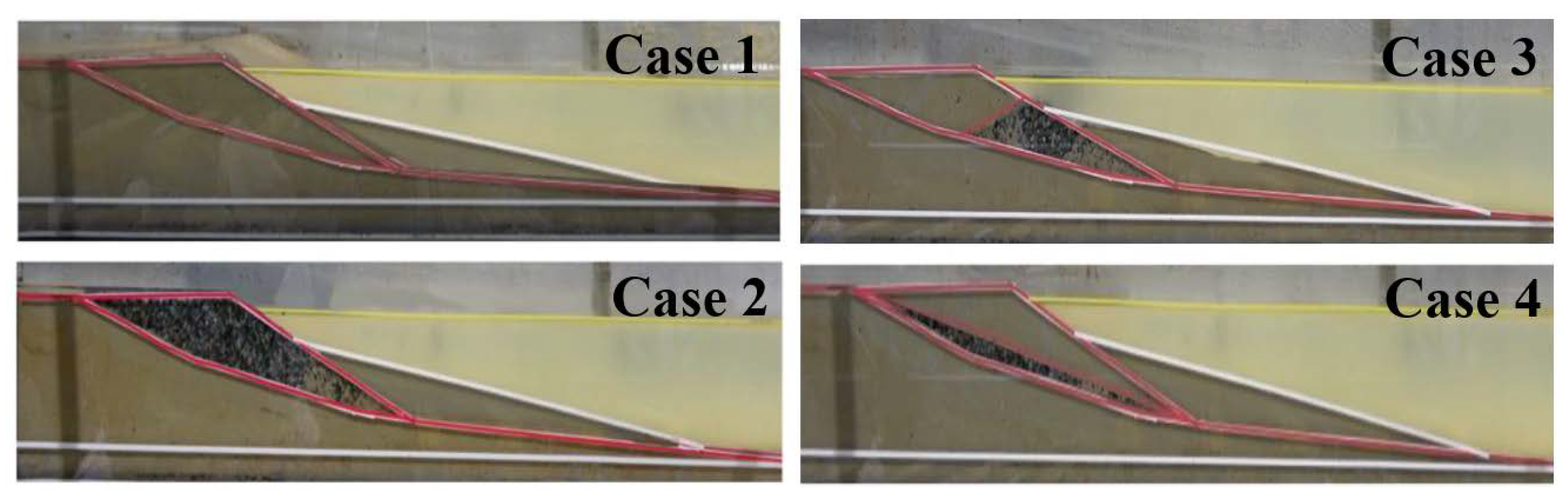
2.2. Hydraulic Model Test Cases
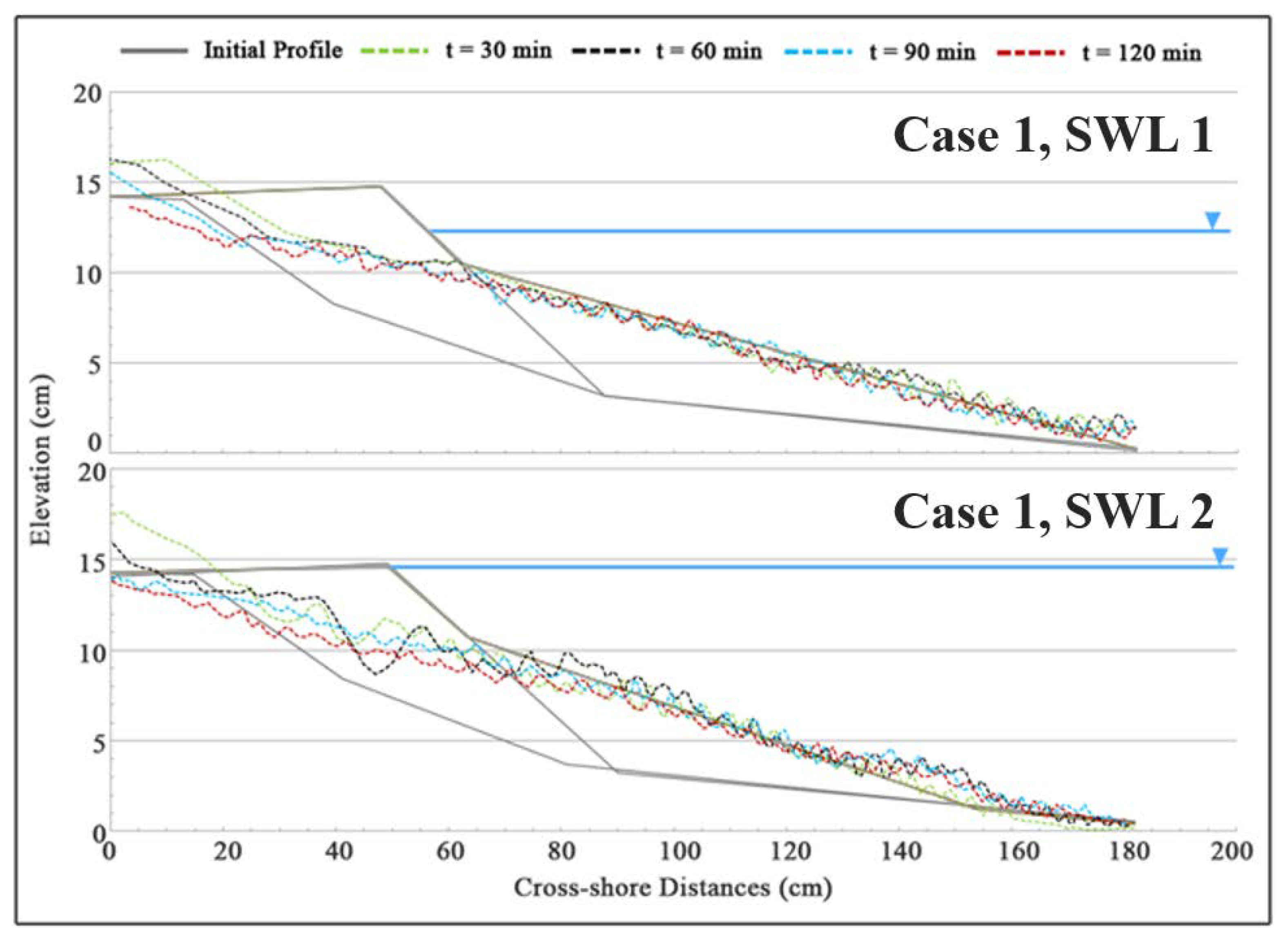
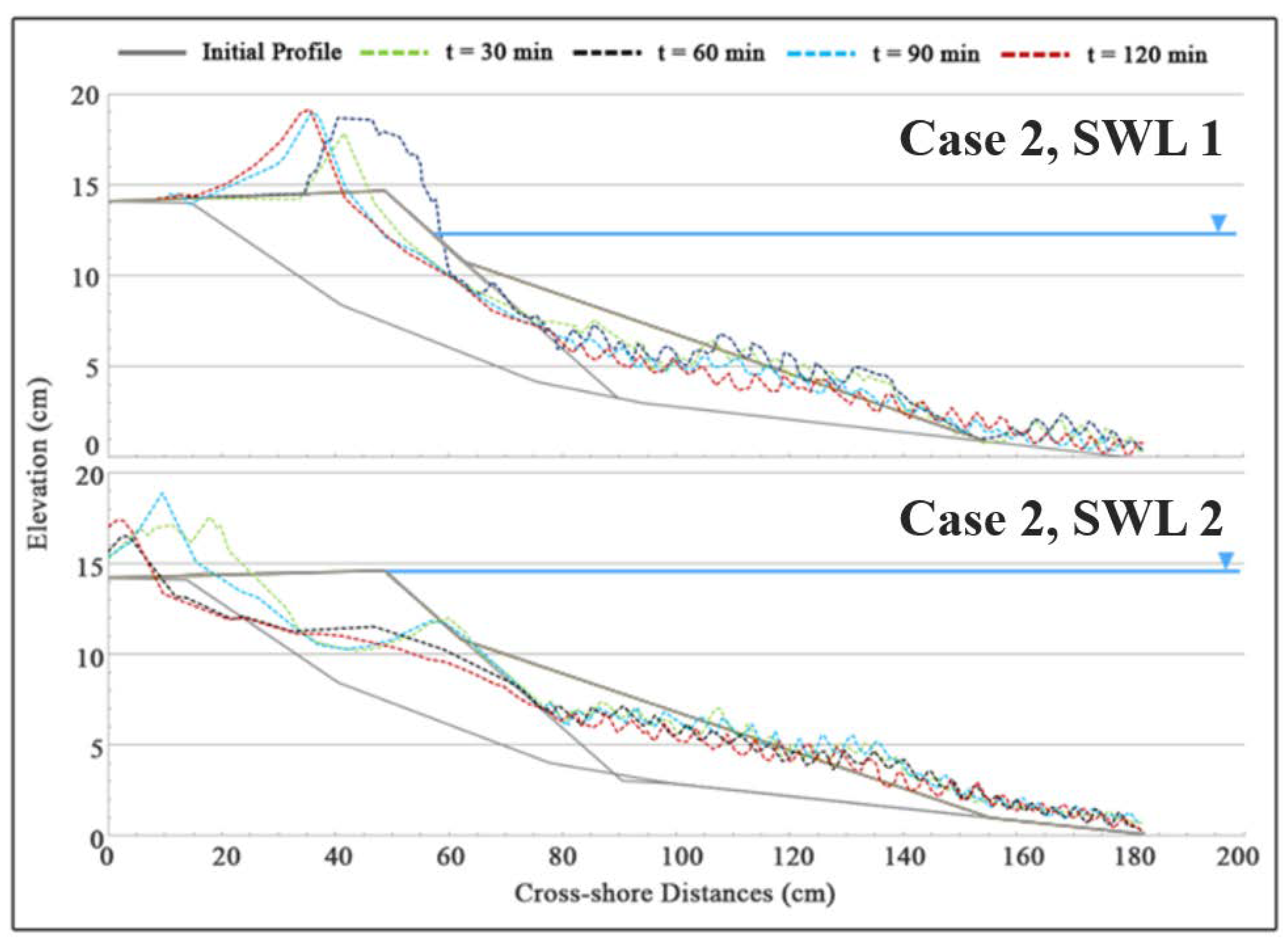
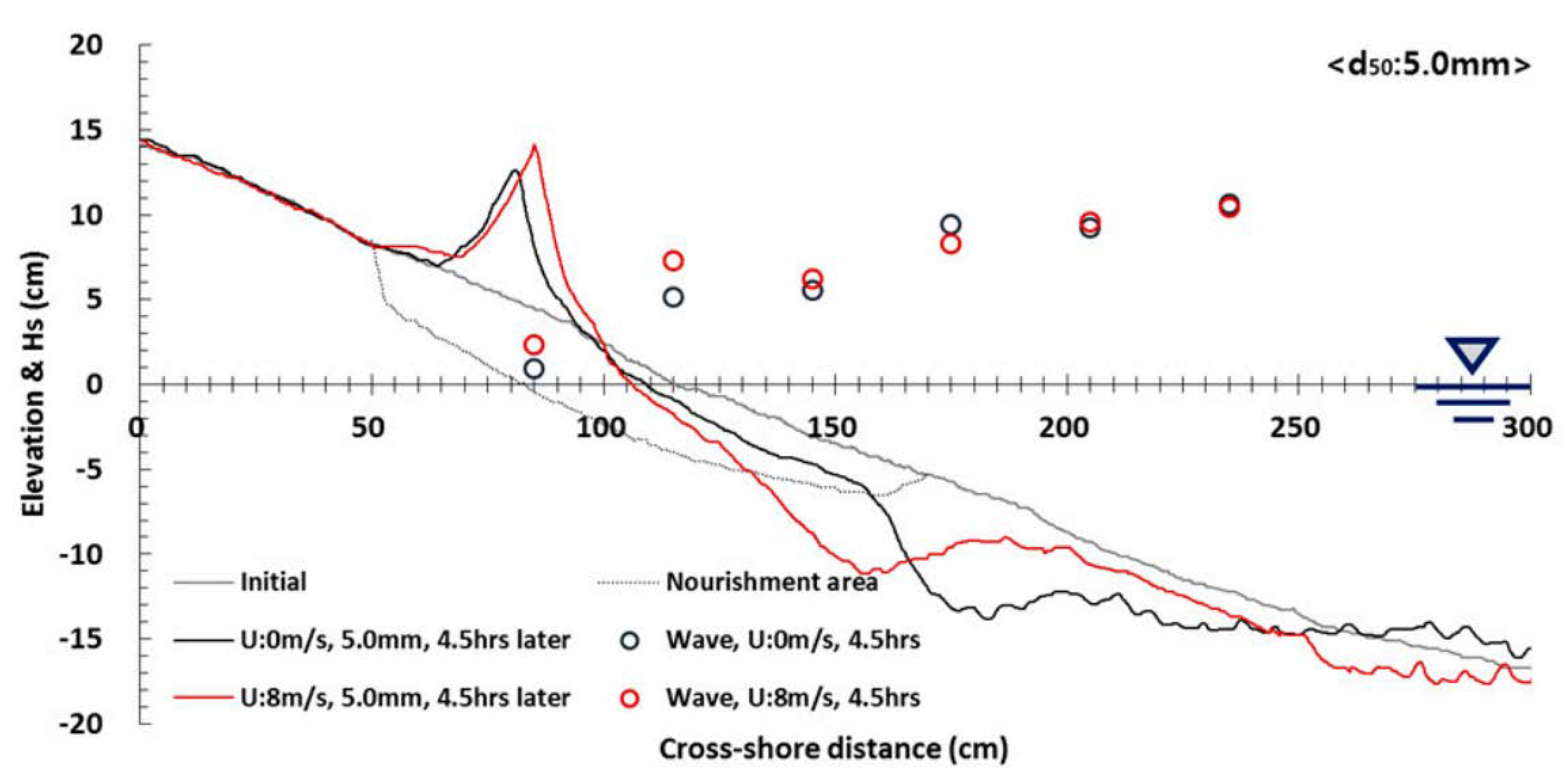
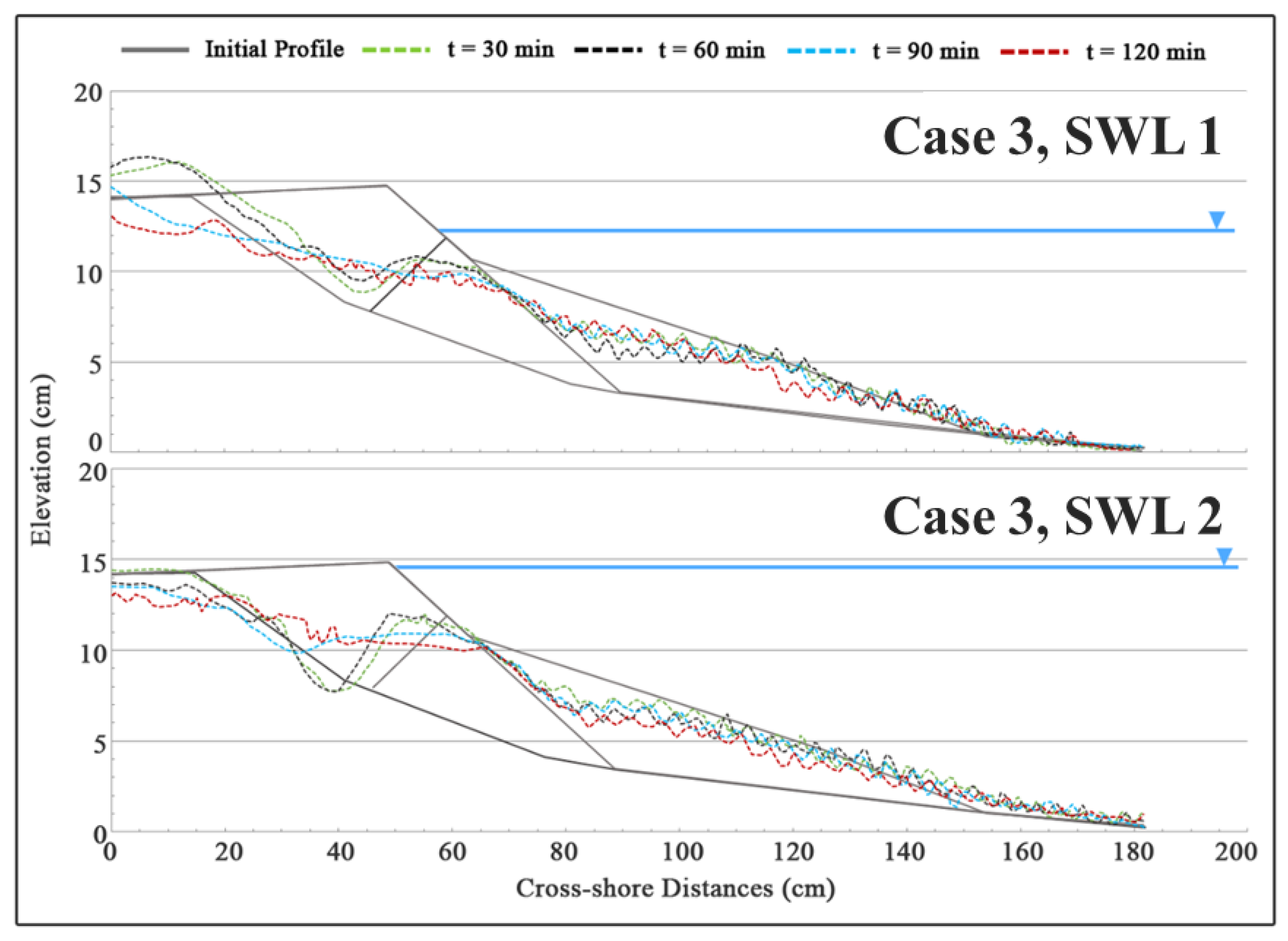
2.3. Beach Profile Evolution
3. Numerical Simulations and Artificial Intelligence
3.1. Artificial Neural Networks
3.2. Dataset and Architecture of the ANN Model
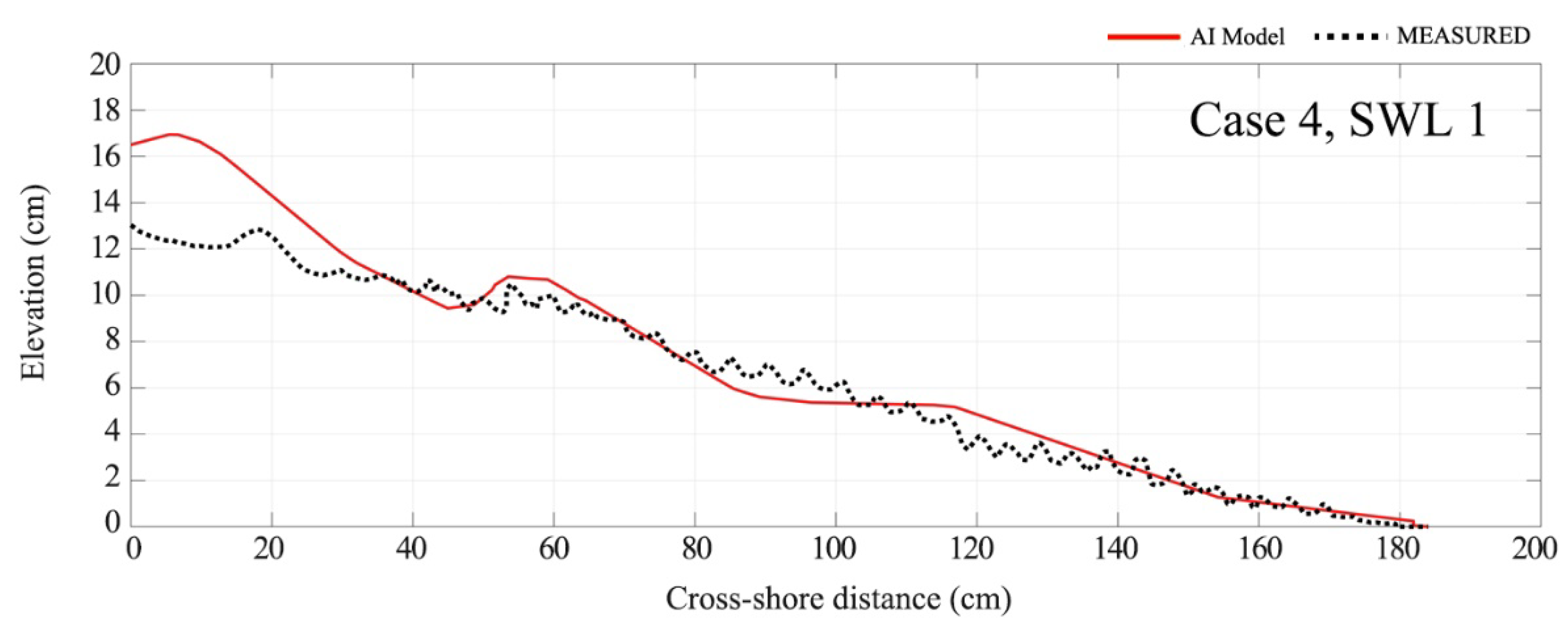
3.3. AI (ANN) Model Results
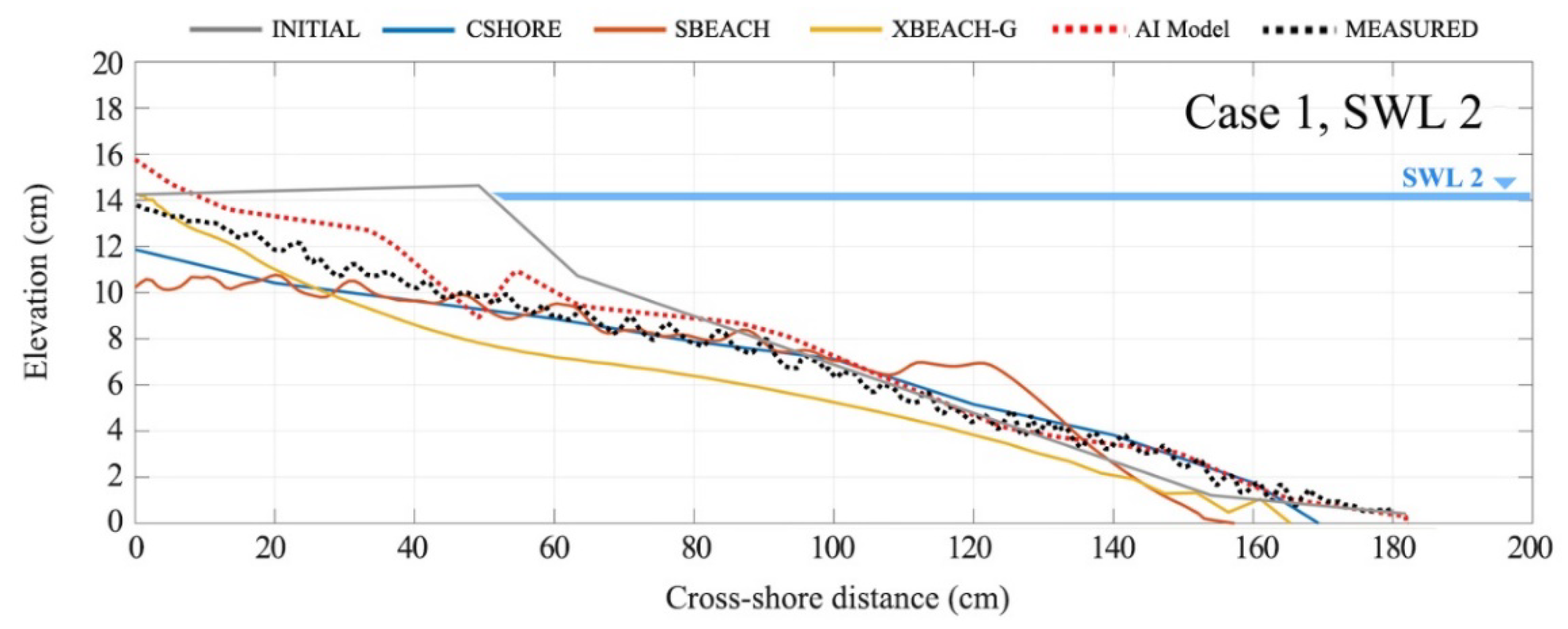
3.4. Numerical Simulations and Comparisons
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Lopez, I.; Aragones, I.; Villacampa, Y.; Gonzalez, F.J. Gravel beach nourishment: Modelling the equilibrium beach profile. Sci. Total Environ. 2017, 619–620, 772–783. [Google Scholar] [CrossRef] [PubMed]
- National Research Council. Beach Nourishment and Protection; National Academy Press: Washington, DC, USA, 1995. [Google Scholar]
- Wieser, W. The effect of grain zize on the distribution of small invertebrates inhabiting the beaches of Puget Sound. Limnol. Oceanogr. 1953, 4, 181–194. [Google Scholar] [CrossRef]
- Kumada, T.; Uda, T.; Matsuura, T.; Sumiya, M. Field Experiment on Beach Nourishment Using Gravel at Jinkoji Coast. In Proceedings of the 32nd Conference on Coastal Engineering, Shanghai, China, 30 June–5 July 2010; pp. 1–13. [Google Scholar]
- Cammelli, C.; Jackson, N.L.; Nordstrom, K.F.; Pranzini, E. Assessment of a gravel nourishment project fronting a seawall at Marina di Pisa, Italy. J. Coast. Res. 2006, 2, 770–775. [Google Scholar]
- Cohen, O.; Anthony, E.J. Gravel beach erosion and nourishment in Nice, French Riviera. Mediterranee 2007, 108, 99–103. [Google Scholar] [CrossRef]
- Onaka, S.; Ichikawa, S.; Izumi, M.; Uda, T.; Hirano, J. Effectiveness of gravel beach nourishment on Pacific Island, world scientific. Asian Pac. Coasts 2017, 2017, 651–662. [Google Scholar]
- Kim, H.D.; Kim, K.H.; Aoki, S.; Koo, S.; Kwak, K. Gravel beach nourishment at a low-wave energy environment to control the effects of global warming. Coast. Sediment. 2019, 19, 329–337. [Google Scholar]
- Noble, D.R.; Draycott, S.; Thomas, A.; Bruce, T. Design diagram for wavelength discrepancy in tank testing with inconsistently scaled intermediate water depth. Int. J. Mar. Energy 2017, 18, 109–113. [Google Scholar] [CrossRef]
- Shim, K.T.; Kim, K.H.; Park, J.H. The effectiveness of adaptive beach protection methods under wind application. J. Mar. Sci. Eng. 2019, 7, 387. [Google Scholar] [CrossRef]
- Abambres, M.; Ferreira, A. Application of ANN in pavement engineering: State-of-Art. HAL 2017, hal-0200668v2. [Google Scholar] [CrossRef]
- Konate, A. Artificial neural network: A tool for approximating complex functions. HAL 2019, hal-020759. [Google Scholar]
- Salahudeen, A.B.; Ijimdiya, T.S.; Eberemu, A.O.; Osinubi, K.J. Artificial neural networks prediction of compaction characteristics of black cotton soil stabilized with cement kiln dust. J. Soft Comput. Civil. Eng. 2018, 2, 50–71. [Google Scholar]
- Matuszewski, J.; Sikorska-Lukasiewicz, K. Neural network application for emitter identification. In Proceedings of the 18th International Radar Symposium (IRS), Prague, Czech Republic, 28–30 June 2017; pp. 1–8. [Google Scholar]
- Ramachandran, P.; Zoph, B.; Le, Q. Searching for activation functions. arXiv 2017, arXiv:1710.05941. [Google Scholar]
- Yuan, F. Cross-Shore Beach Morphological Model for Beach Erosion and Recovery. Ph.D. Thesis, School of Civil and Environmental Engineering, UNSW University, Sydney, NSW, Australia, 2017. [Google Scholar]
- Bruun, P. Coastal erosion and the development of beach profiles. In Beach Erosion Board Technical Memo No. 44; US Army Engineer Waterways Experiment Station: Vicksburg, MS, USA, 1954. [Google Scholar]
- Bagnold, R.A. An Approach to The Sediment Transport Problem from General Physics; Geological Survey Professional Paper 422-1; United States Government Printing Office: Washington, DC, USA, 1996. [Google Scholar]
- Bailard, J.A. Modeling On-Offshore Sediment Transport in the Surfzone. In Proceedings of the 18th International Conference on Coastal Engineering, Cape Town, South Africa, 14–19 November 1982. [Google Scholar]
- Stive, M.J.F.; De Vriend, H.J. Quasi-3D nearshore current modelling: Wave-induced secondary current. In Proceedings of the Coastal Hydrodynamics, ASCE, Newark, DL, USA, 28 June–1 July 1987; pp. 356–370. [Google Scholar]
- Larson, M. A model of beach profile change under random waves. J. Waterw. Port. Coast. Ocean. Eng. 1996, 122, 172–181. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Trial | Condition | Wave Characteristics | Sea Level |
|---|---|---|---|
| Case 1-1 | Sand Only | Hs = 5.2 m Ts = 1.1 s | SWL 1 |
| Case 1-2 | SWL 2 | ||
| Case 2-1 | Gravel Only | SWL 1 | |
| Case 2-2 | SWL 2 | ||
| Case 3-1 | Sand (Top) + Gravel (Bottom) | SWL 1 | |
| Case 3-2 | SWL 2 | ||
| Case 4-1 | Sand (Left) + Gravel (Right) | SWL 1 | |
| Case 4-2 | SWL 2 |
| Parameter | LAF Case | RAF Case | SAF Case | |
|---|---|---|---|---|
| Model | Deep Neural Network | |||
| Input parameter | Cross-shore distance (value) | |||
| Initial profile | ||||
| Time | ||||
| Height | ||||
| Period | ||||
| Case | ||||
| Sea Water Level | ||||
| Activation function | Linear | ReLU | sigmoid | |
| Hidden layer | 3 | |||
| Hidden layer’s node | 254 | |||
| Output node | 1 | |||
| Target | Change Profile | |||
| SWL | CASE | RMSE | MAE | MSE |
|---|---|---|---|---|
| SWL 1 | 1 | 0.6141 | 0.6141 | 0.7235 |
| 2 | 1.3004 | 1.3004 | 3.9409 | |
| 3 | 0.9777 | 0.9777 | 1.9097 | |
| 4 | 0.8903 | 0.8903 | 1.9033 | |
| SWL 2 | 1 | 0.7559 | 0.7559 | 0.9443 |
| 2 | 0.8308 | 0.8308 | 1.2265 | |
| 3 | 0.5345 | 0.5345 | 0.4829 | |
| 4 | 0.6398 | 0.6398 | 0.7698 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, H.D.; Aoki, S.-i. Artificial Intelligence Application on Sediment Transport. J. Mar. Sci. Eng. 2021, 9, 600. https://doi.org/10.3390/jmse9060600
Kim HD, Aoki S-i. Artificial Intelligence Application on Sediment Transport. Journal of Marine Science and Engineering. 2021; 9(6):600. https://doi.org/10.3390/jmse9060600
Chicago/Turabian StyleKim, Hyun Dong, and Shin-ichi Aoki. 2021. "Artificial Intelligence Application on Sediment Transport" Journal of Marine Science and Engineering 9, no. 6: 600. https://doi.org/10.3390/jmse9060600
APA StyleKim, H. D., & Aoki, S.-i. (2021). Artificial Intelligence Application on Sediment Transport. Journal of Marine Science and Engineering, 9(6), 600. https://doi.org/10.3390/jmse9060600