
Effect of Boundary Conditions on Fluid–Structure Coupled Modal Analysis of Runners



Abstract
1. Introduction
2. Numerical Model
2.1. Governing Equation
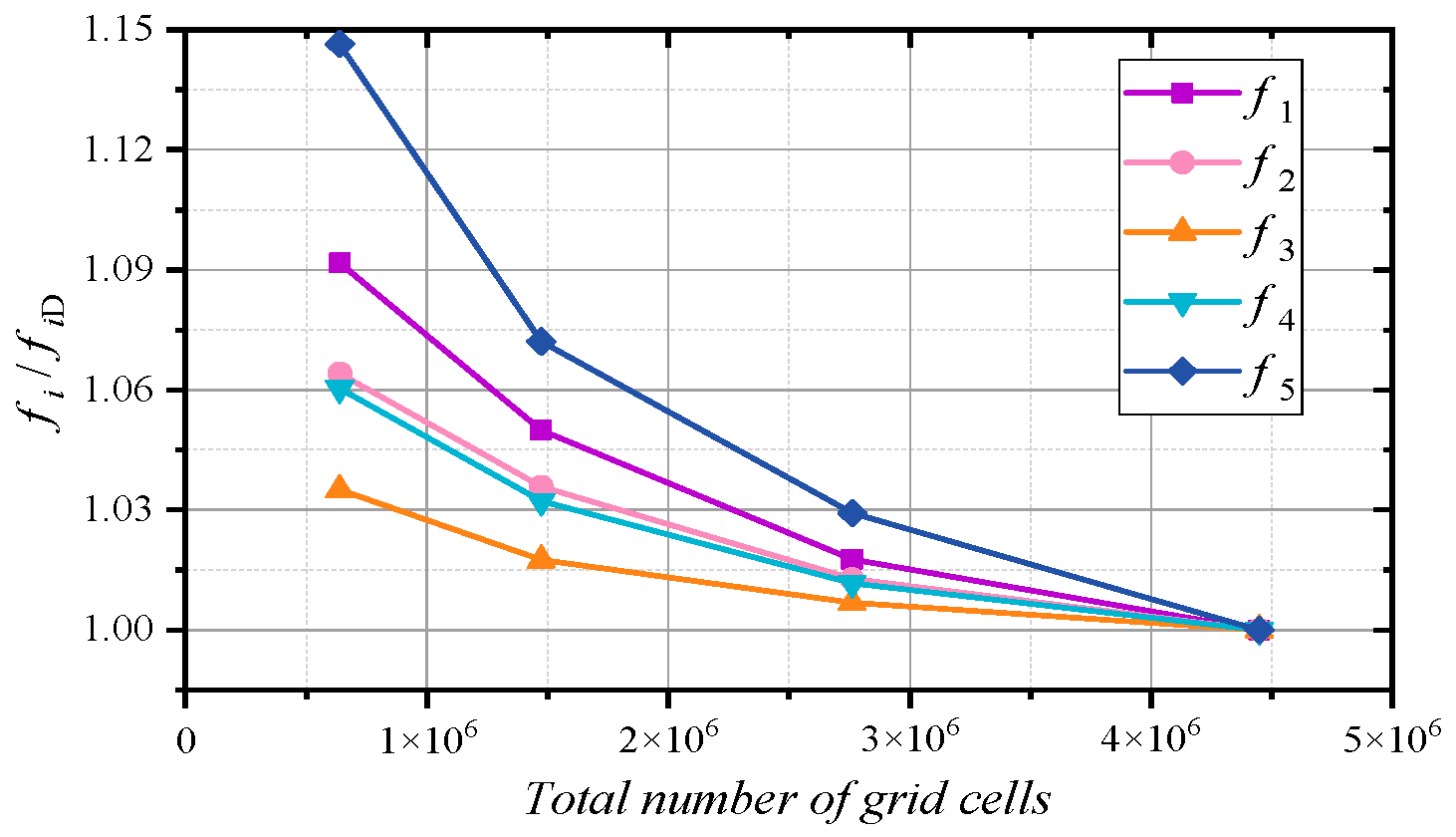
2.2. Finite Element Model
2.3. Definition of Vibration Mode
3. Results and Discussion
3.1. Modes under Different Constraints
3.2. Modes Considering Energy Loss on the Wall
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liang, Q.W.; Wang, Z.W.; Fang, Y. Modal analysis of Francis turbine with considering FSI. J. Hydroelectr. Eng. 2004, 23, 116–120. (In Chinese) [Google Scholar]
- Rodriguez, C.G.; Egusquiza, E.; Escaler, X.; Liang, Q.; Avellan, F. Experimental investigation of added mass effects on a Francis turbine runner in still water. J. Fluids Struct. 2006, 22, 699–712. [Google Scholar] [CrossRef]
- Han, Q.L.; Xing, W.T.; Li, W.H.; Zhang, Z.; Guo, S.S. Experimental modal analysis of blades in different media. Acta Energ. Sol. Sin. 2019, 40, 285–290. (In Chinese) [Google Scholar]
- Presas, A.; Valero, C.; Huang, X.X.; Egusquiza, E.; Farhat, M.; Avellan, F. Analysis of the dynamic response of pump-turbine runners—Part I: Experiment. In Proceedings of the IOP Conference Series: Earth and Environmental Science, Beijing, China, 19–23 August 2012; IOP Publishing: Bristol, UK, 2012; Volume 15. [Google Scholar]
- Østby, P.T.K.; Sivertsen, K.; Billdal, J.T.; Haugen, B. Experimental investigation on the effect off near walls on the eigen frequency of a low specific speed francis runner. Mech. Syst. Signal Process. 2019, 118, 757–766. [Google Scholar] [CrossRef]
- Egusquiza, E.; Valero, C.; Liang, Q.W.; Coussirat, M.; Seidel, U. Fluid added mass effect in the modal response of a pump-turbine impeller. In Proceedings of the 2009 International Conference on Mechatronic and Embedded Systems and Applications, San Diego, CA, USA, 30 August–2 September 2009; Volume 48982, pp. 715–724. [Google Scholar]
- Hübner, B.; Seidel, U.; Roth, S. Application of fluid-structure coupling to predict the dynamic behavior of turbine components. In Proceedings of the 25th IAHR Symposium on Hydraulic Machinery and Systems, Timisoara, Romania, 20–24 September 2010. [Google Scholar]
- Liu, X.; Luo, Y.Y.; Karney, B.W.; Wang, Z.; Zhai, L. Virtual testing for modal and damping ratio identification of submerged structures using the PolyMAX algorithm with two-way fluid-structure Interactions. J. Fluids Struct. 2015, 54, 548–565. [Google Scholar] [CrossRef]
- Liang, Q.W.; Rodriguez, C.G.; Egusquiza, E.; Escaler, X.; Farhat, M.; Avellan, F. Numerical simulation of fluid added mass effect on a francis turbine runner. Comput. Fluids 2007, 36, 1106–1118. [Google Scholar] [CrossRef]
- Egusquiza, E.; Valero, C.; Huang, X.X.; ou, E.; Guardo, A.; Rodriguez, C. Failure investigation of a large pump-turbine runner. Eng. Fail. Anal. 2012, 23, 27–34. [Google Scholar] [CrossRef]
- Huang, X.X.; Escaler, X. Added mass effects on a Francis turbine runner with attached blade cavitation. Fluids 2019, 4, 107. [Google Scholar] [CrossRef]
- Huang, X.X.; Oram, C.; Sick, M. Static and dynamic stress analyses of the prototype high head Francis runner based on site measurement. In Proceedings of the IOP Conference Series: Earth and Environmental Science, Montreal, QC, Canada, 22–26 September 2014; IOP Publishing: Bristol, UK, 2014; Volume 22, p. 032052. [Google Scholar]
- Rodriguez, C.G.; Flores, P.; Pierart, F.G.; Contzen, L.R.; Egusquiza, E. Capability of structural-acoustical FSI numerical model to predict natural frequencies of submerged structures with nearby rigid surfaces. Comput. Fluids 2012, 64, 117–126. [Google Scholar] [CrossRef]
- Askari, E.; Jeong, K.; Amabili, M. Hydroelastic vibration of circular plates immersed in a liquid-filled container with free surface. J. Sound Vib. 2013, 332, 3064–3085. [Google Scholar] [CrossRef]
- He, L.Y.; Zhou, L.J.; Ahn, S.H.; Wang, Z.; Nakahara, Y.; Kurosawa, S. Evaluation of gap influence on the dynamic response behavior of pump-turbine runner. Eng. Comput. 2019, 36, 491–508. [Google Scholar] [CrossRef]
- Valentín, D.; Ramos, D.; Bossio, M.; Presas, A.; Egusquiza, E.; Valero, C. Influence of the boundary conditions on the natural frequencies of a Francis turbine. In Proceedings of the IOP Conference Series: Earth and Environmental Science, Grenoble, France, 4–8 July 2016; IOP Publishing: Bristol, UK, 2016; Volume 49, p. 072004. [Google Scholar]
- Egusquiza, E.; Valero, C.; Presas, A.; Huang, X.; Guardo, A.; Seidel, U. Analysis of the dynamic response of pump-turbine impellers. Influence of the rotor. Mech. Syst. Signal Process. 2016, 68, 330–341. [Google Scholar] [CrossRef]
- Woyjak, D.B. Acoustic and Fluid Structure Interaction, A Revision 5.0 Tutorial; Swanson Analysis Systems: Houston, TX, USA, 1992. [Google Scholar]
- Rajakumar, C.; Ali, A. Acoustic boundary element eigenproblem with sound absorption and its solution using lanczos algorithm. Int. J. Numer. Methods Eng. 1993, 36, 3957–3972. [Google Scholar] [CrossRef]
- ANSYS Inc. Mechanical APDL Theory Guide; ANSYS: Canonsburg, PA, USA, 2017. [Google Scholar]
- Li, D.K.; Xia, X.; Zhou, L.J.; Gong, K.; Wang, Z. Effect of outer edge modification on dynamic characteristics of pump turbine runner. Eng. Fail. Anal. 2021, 124, 105379. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Grid | A | B | C | D |
|---|---|---|---|---|
| Unit number of structure (-) | 271,271 | 638,713 | 1,209,795 | 2,033,087 |
| Unit number of water (-) | 366,915 | 834,053 | 1,551,437 | 2,414,909 |
| Total unit number (-) | 638,186 | 1,472,766 | 2,761,232 | 4,447,996 |
| 1ND | 0NC | Torsional | Radial | |
|---|---|---|---|---|
| Surface constraint |  |  |  |  |
| line constraint |  |  |  |  |
| shaft constraint |  |  |  |  |
| Modal | 1ND | 2ND | 3ND | 0NC | 1NC |
|---|---|---|---|---|---|
| 0.351 | 0.017 | 0.004 | 0.094 | 0.027 | |
| Modal | 0NC-CP | Torsional | Radial | Blade I | Blade II |
| 0.016 | 0.693 | 0.564 | 0.003 | 0.011 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, D.; Xia, X.; Yang, J.; Wang, Z. Effect of Boundary Conditions on Fluid–Structure Coupled Modal Analysis of Runners. J. Mar. Sci. Eng. 2021, 9, 434. https://doi.org/10.3390/jmse9040434
Liu D, Xia X, Yang J, Wang Z. Effect of Boundary Conditions on Fluid–Structure Coupled Modal Analysis of Runners. Journal of Marine Science and Engineering. 2021; 9(4):434. https://doi.org/10.3390/jmse9040434
Chicago/Turabian StyleLiu, Dianhai, Xiang Xia, Jing Yang, and Zhengwei Wang. 2021. "Effect of Boundary Conditions on Fluid–Structure Coupled Modal Analysis of Runners" Journal of Marine Science and Engineering 9, no. 4: 434. https://doi.org/10.3390/jmse9040434
APA StyleLiu, D., Xia, X., Yang, J., & Wang, Z. (2021). Effect of Boundary Conditions on Fluid–Structure Coupled Modal Analysis of Runners. Journal of Marine Science and Engineering, 9(4), 434. https://doi.org/10.3390/jmse9040434