
Ship Roll Prediction Algorithm Based on Bi-LSTM-TPA Combined Model

Abstract
1. Introduction
2. Bi-LSTM and TPA Algorithm
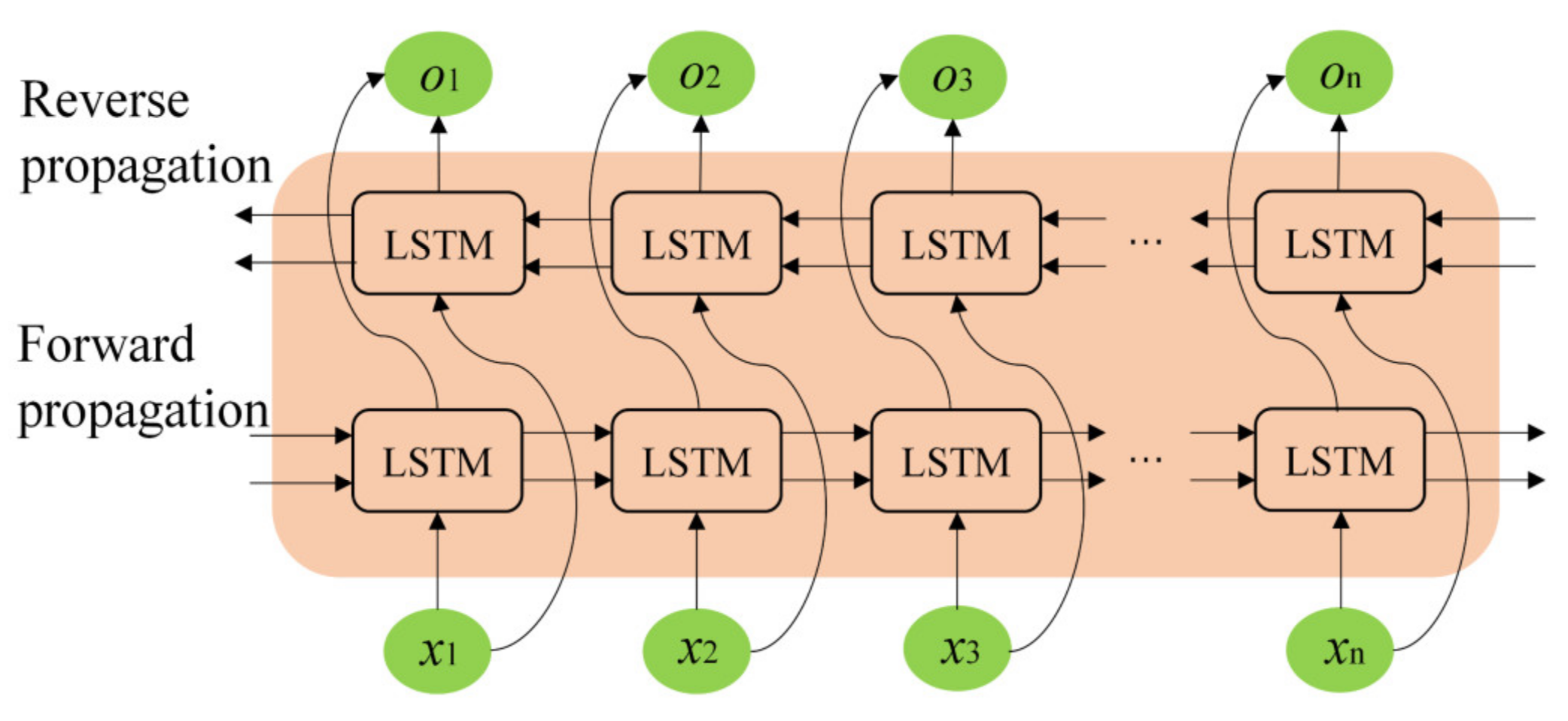
2.1. Bi-LSTM Model Structure
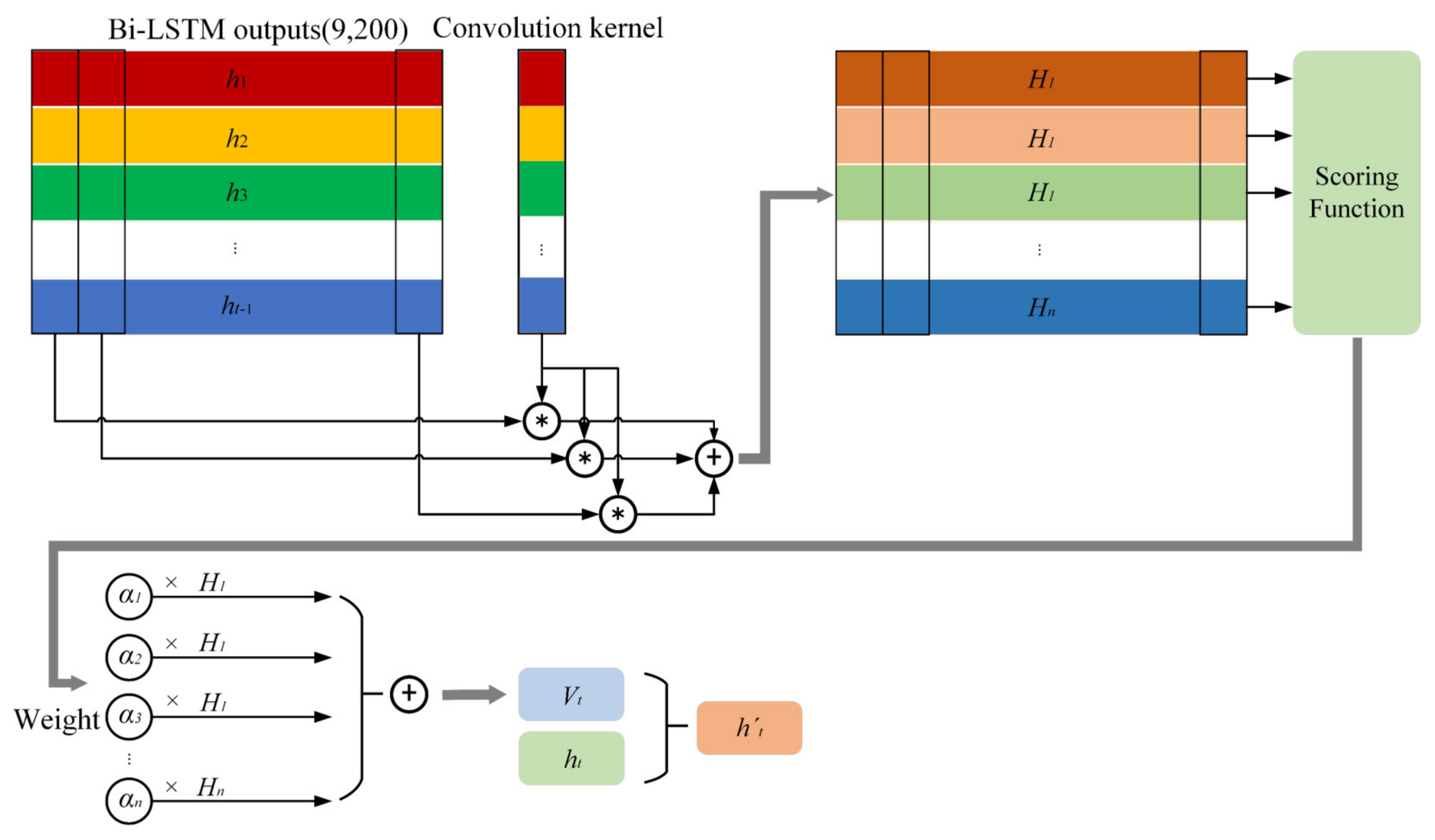
2.2. TPA Structure
3. Ship Roll Angle Prediction Algorithm Based on Bi-LSTM-TPA Model
4. Simulation Results of Roll Angle Prediction
4.1. Evaluation Indicators
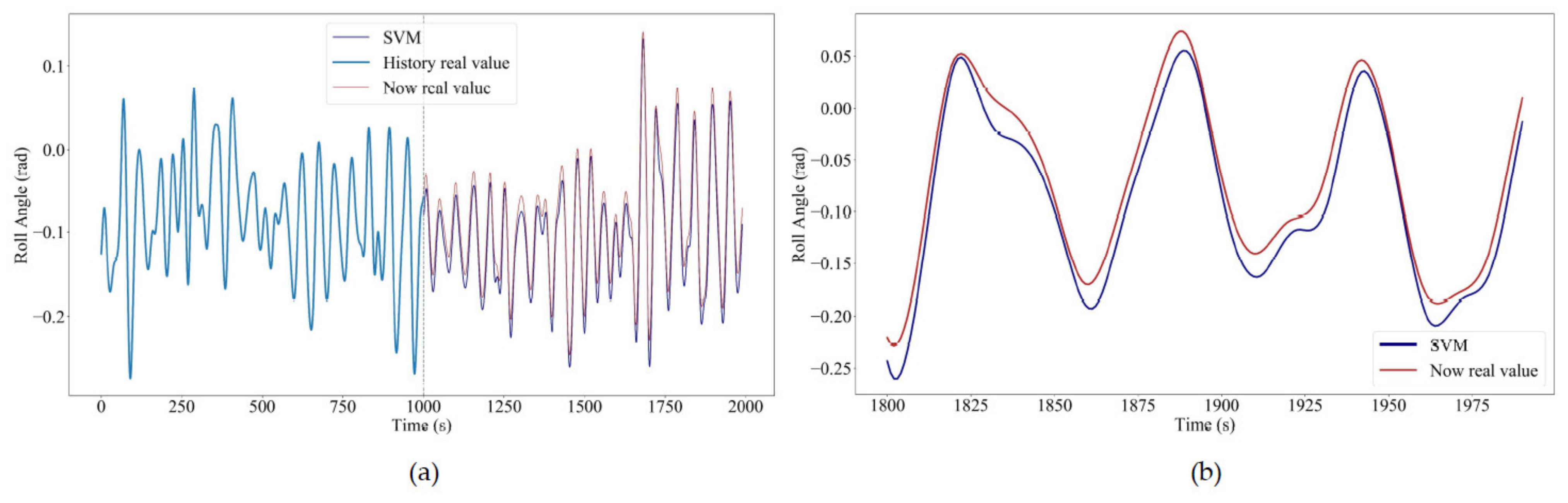
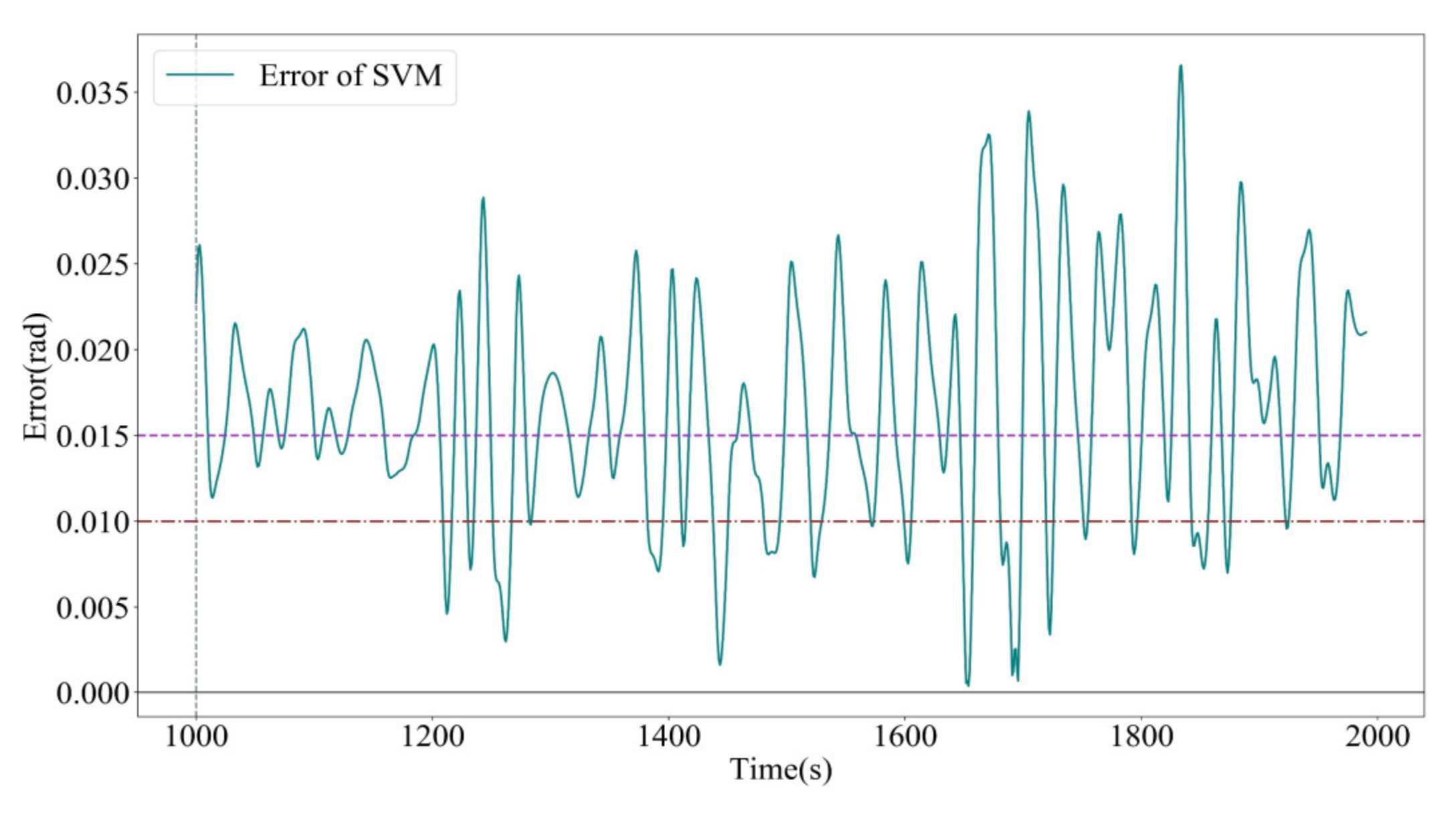
4.2. Prediction of Ship Roll Angle Based on SVM Model
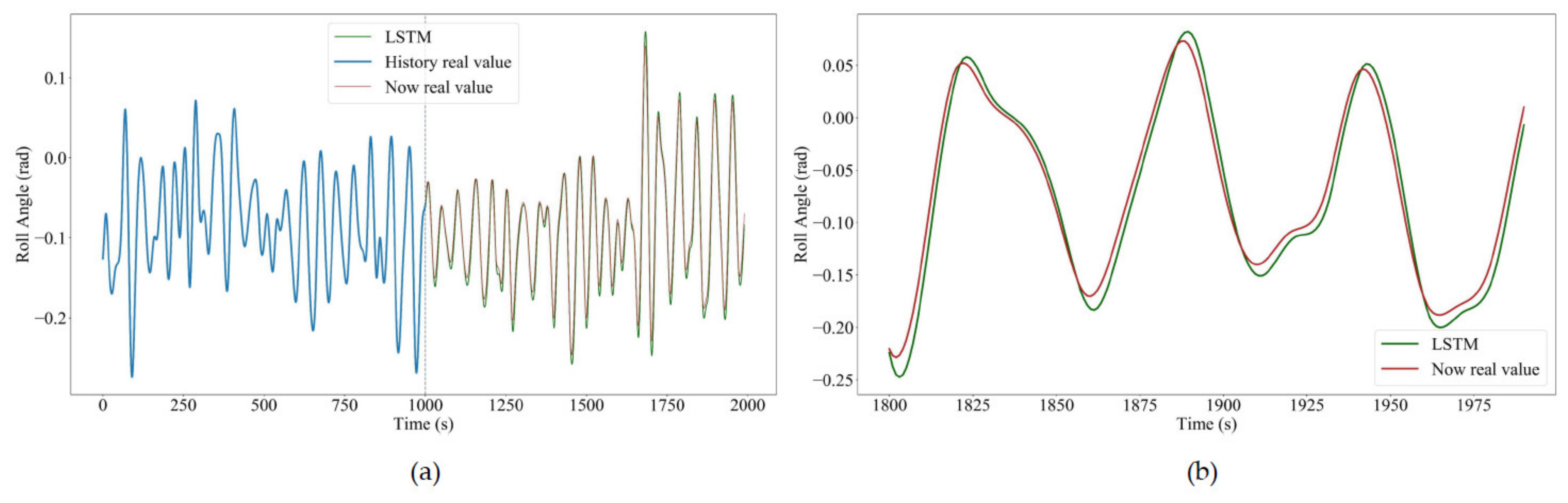
4.3. Prediction of Ship Roll Angle Based on LSTM Model
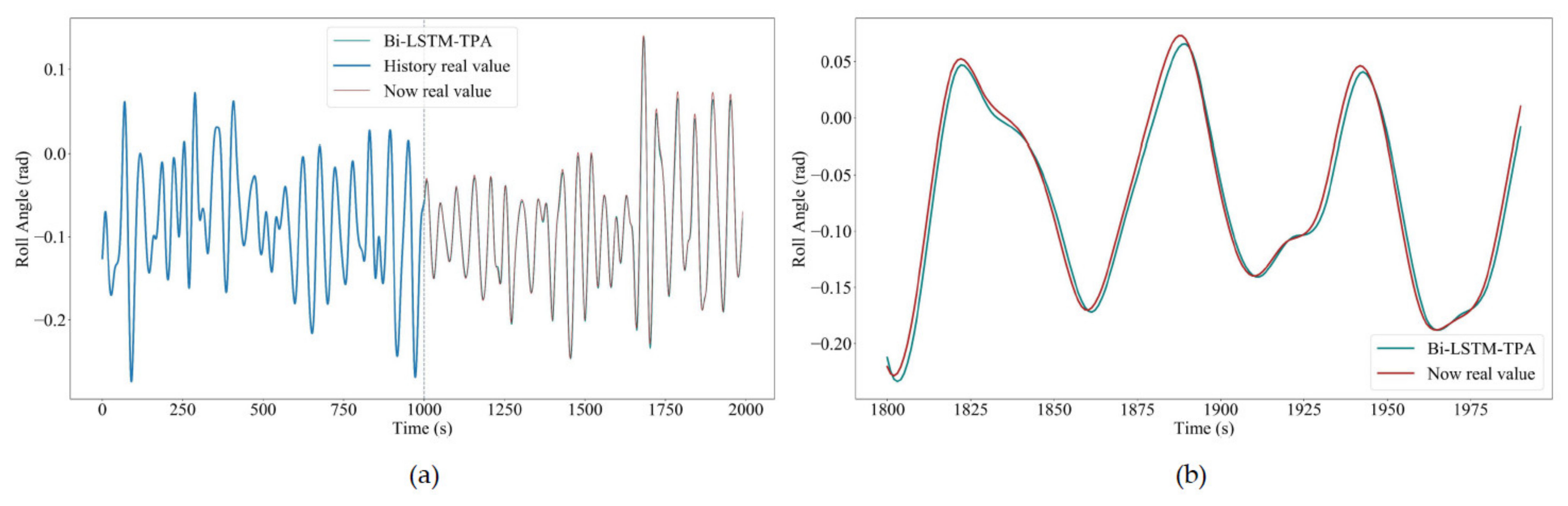
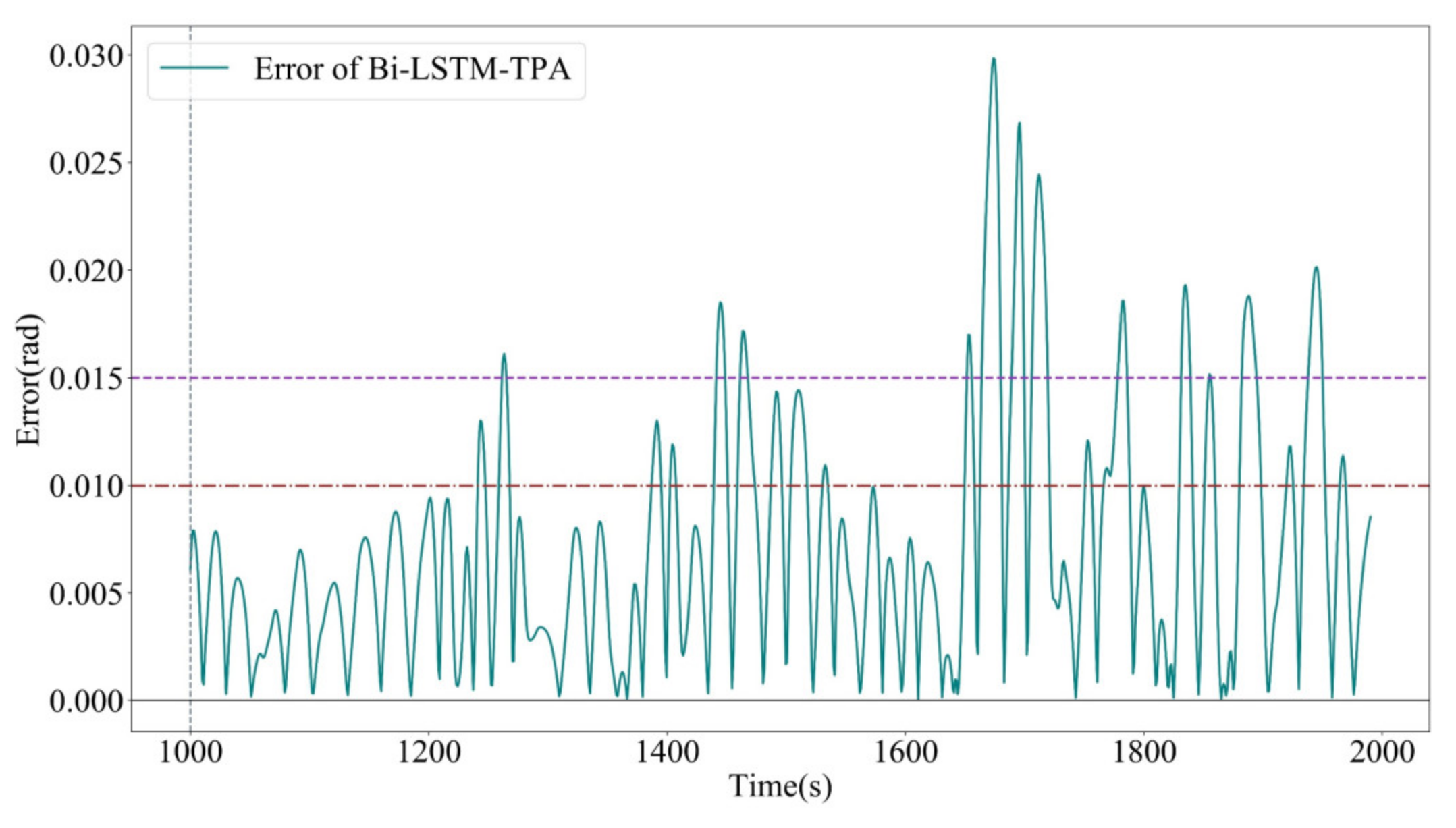
4.4. Prediction of Ship Roll Angle Based on Bi-LSTM-TPA
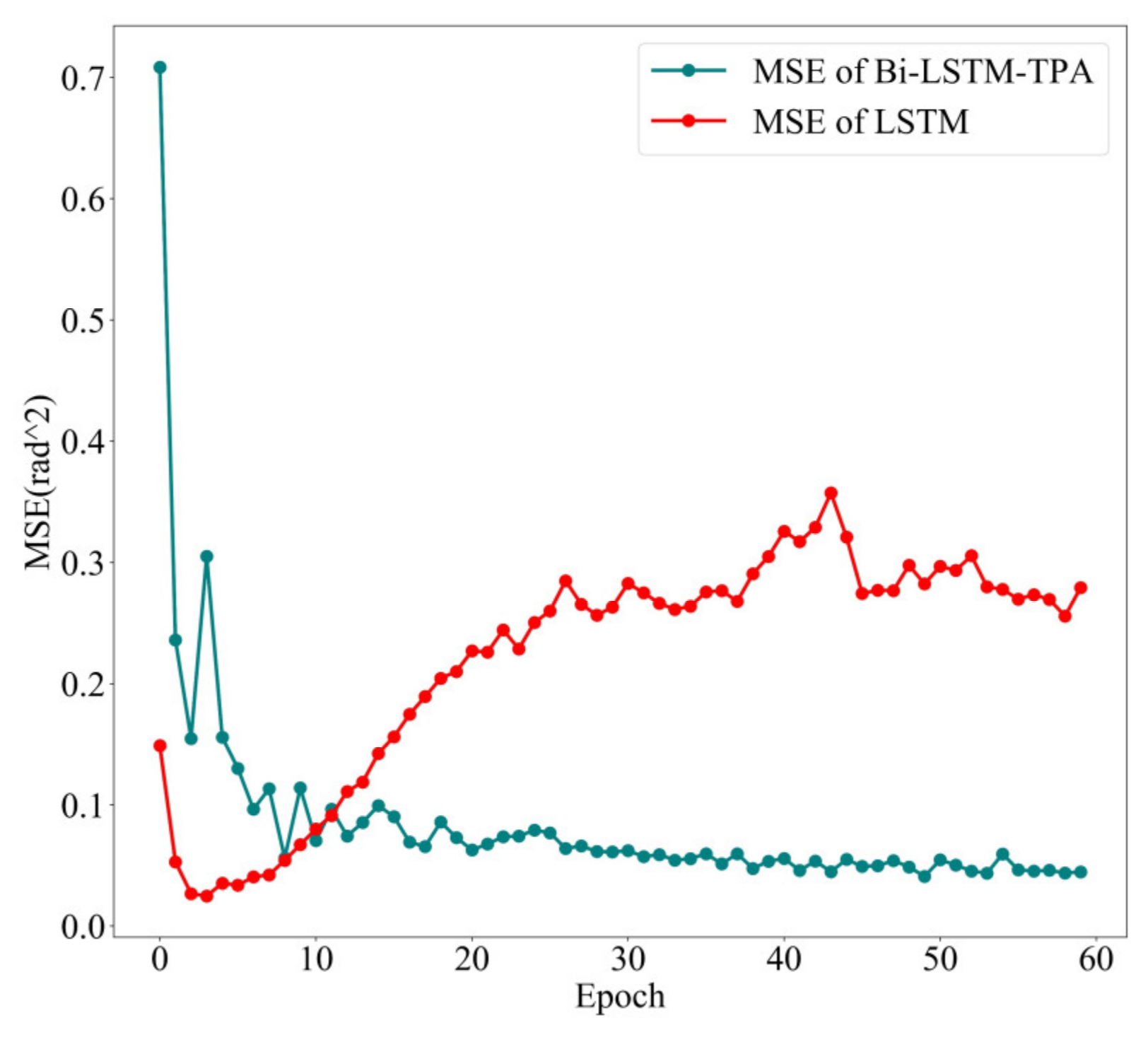
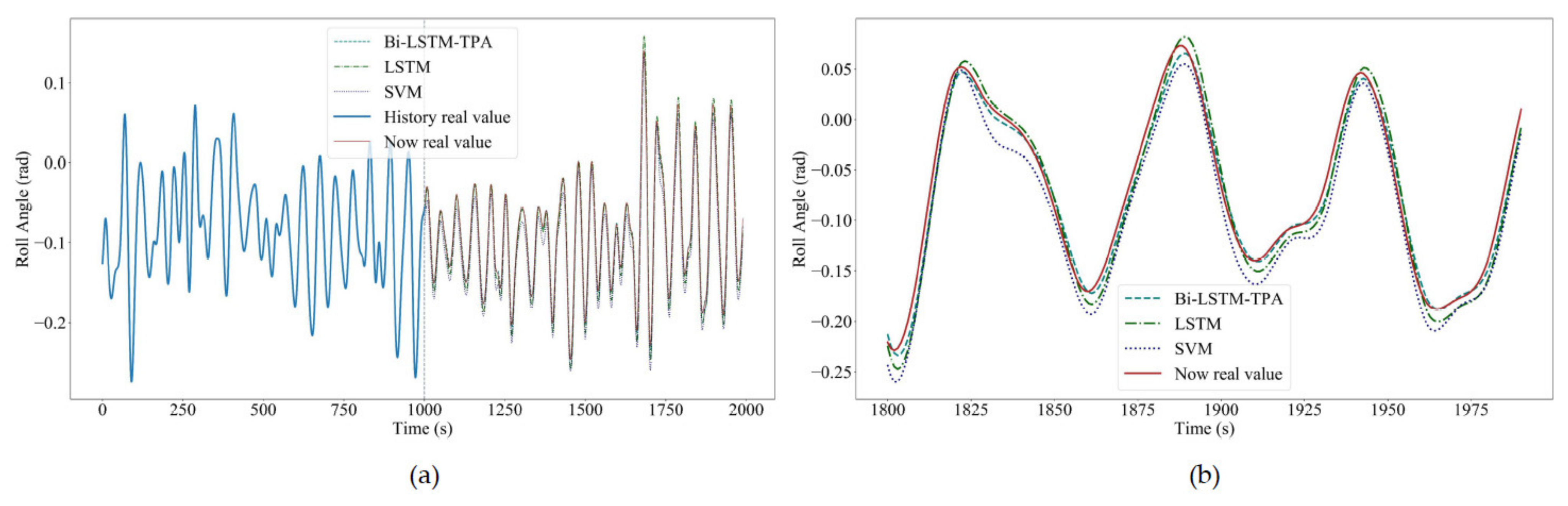
4.5. Comparison of Prediction Results of Three Models
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yu, L.; Ma, N.; Wang, S. Parametric Roll Prediction of the KCS Containership in Head Waves with Emphasis on the Roll Damping and Nonlinear Restoring Moment. Ocean Eng. 2019, 188, 106298. [Google Scholar] [CrossRef]
- Li, Y.; He, Y.; Su, Y. Forecasting the daily power output of a grid-connected photovoltaic system based on multivariate adaptive regression splines. Appl. Energy 2016, 180, 392–401. [Google Scholar] [CrossRef]
- Huang, S.J.; Huang, C.L. Control of an Inverted Pendulum Using Grey Prediction Model. IEEE Trans. Ind. Appl. 2000, 36, 452–458. [Google Scholar] [CrossRef]
- Yazdanbakhsh, O.; Dick, S. Forecasting of Multivariate Time Series via Complex Fuzzy Logic. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 2160–2171. [Google Scholar] [CrossRef]
- Cai, M.; Pipattanasomporn, M.; Rahman, S. Day-ahead building-level load forecastsusing deep learning vs. traditional time-series techniques. Appl. Energy 2019, 236, 1078–1088. [Google Scholar] [CrossRef]
- Gonzalez, J.P.; Roque, A.M.S.; Perez, E.A. Forecasting Functional Time Series with a New Hilbertian ARMAX Model: Application to Electricity Price Forecasting. IEEE Trans. Power Syst. 2018, 33, 545–556. [Google Scholar] [CrossRef]
- De Lima Silva, P.C.; Sadaei, H.J.; Ballini, R.; Guimaraes, F.G. Probabilistic Forecasting with Fuzzy Time Series. IEEE Trans. Fuzzy Syst. 2020, 28, 1771–1784. [Google Scholar] [CrossRef]
- Li, R.; Jiang, C.; Zhu, F.; Chen, X. Traffic Flow Data Forecasting Based on Interval Type-2 Fuzzy Sets Theory. IEEE CAA J. Autom. Sin. 2016, 3, 141–148. [Google Scholar] [CrossRef]
- Jiang, H.; Duan, S.; Huang, L.; Han, Y.; Yang, H.; Ma, Q. Scale Effects in AR Model Real-Time Ship Motion Prediction. Ocean Eng. 2020, 203, 107202. [Google Scholar] [CrossRef]
- Li, R.; Huang, Y.; Wang, J. Long-Term Traffic Volume Prediction Based on K-Means Gaussian Interval Type-2 Fuzzy Sets. IEEE CAA J. Autom. Sin. 2019, 6, 1344–1351. [Google Scholar] [CrossRef]
- Liu, B.; Nowotarski, J.; Hong, T.; Weron, R. Probabilistic Load Forecasting via Quantile Regression Averaging on Sister Forecasts. IEEE Trans. Smart Grid 2015, 8, 730–737. [Google Scholar] [CrossRef]
- Benetazzo, A.; Barbariol, F.; Bergamasco, F.; Torsello, A.; Carniel, S.; Sclavo, M. Stereo Wave Imaging from Moving Vessels: Practical Use and Applications. Coast. Eng. 2016, 109, 114–127. [Google Scholar] [CrossRef]
- Bergamasco, F.; Benetazzo, A.; Barbariol, F.; Carniel, S.; Sclavo, M. Multi-View Horizon-Driven Sea Plane Estimation for Stereo Wave Imaging on Moving Vessels. Comput. Geosci. 2016, 95, 105–117. [Google Scholar] [CrossRef]
- Wu, J.; Liu, H.; Wei, G.; Song, T.; Zhang, C.; Zhou, H. Flash Flood Forecasting Using Support Vector Regression Model in a Small Mountainous Catchment. Water 2019, 11, 1327. [Google Scholar] [CrossRef]
- Jiang, H.; Zhang, Y.; Muljadi, E.; Zhang, J.J.; Gao, D.W. A Short-Term and High-Resolution Distribution System Load Forecasting Approach Using Support Vector Regression with Hybrid Parameters Optimization. IEEE Trans. Smart Grid. 2018, 9, 3341–3350. [Google Scholar] [CrossRef]
- Liu, Q.; Shen, Y.; Wu, L.; Li, J.; Zhuang, L.; Wang, S. A Hybrid FCW-EMD and KF-BA-SVM Based Model for Short-Term Load Forecasting. CSEE JPES 2018, 4, 226–237. [Google Scholar] [CrossRef]
- Wang, X. Ladle Furnace Temperature Prediction Model Based on Large-Scale Data with Random Forest. IEEE CAA J. Autom. Sin. 2017, 4, 770–774. [Google Scholar] [CrossRef]
- Zhang, W.; Zhang, H.; Liu, J.; Li, K.; Yang, D.; Tian, H. Weather Prediction with Multiclass Support Vector Machines in the Fault Detection of Photovoltaic System. IEEE CAA J. Autom. Sin. 2017, 4, 520–525. [Google Scholar] [CrossRef]
- Yin, J.-C.; Perakis, A.N.; Wang, N. A Real-Time Ship Roll Motion Prediction Using Wavelet Transform and Variable RBF Network. Ocean Eng. 2018, 160, 10–19. [Google Scholar] [CrossRef]
- Mulia, I.E.; Asano, T.; Nagayama, A. Real-Time Forecasting of near-Field Tsunami Waveforms at Coastal Areas Using a Regularized Extreme Learning Machine. Coast. Eng. 2016, 109, 1–8. [Google Scholar] [CrossRef]
- Li, C.; Wang, L.; Zhang, G.; Wang, H.; Shang, F. Functional-Type Single-Input-Rule-Modules Connected Neural Fuzzy System for Wind Speed Prediction. IEEE CAA J. Autom. Sin. 2017, 4, 751–762. [Google Scholar] [CrossRef]
- Rafiei, M.; Niknam, T.; Aghaei, J.; Shafie-Khah, M.; Catalao, J.P.S. Probabilistic Load Forecasting Using an Improved Wavelet Neural Network Trained by Generalized Extreme Learning Machine. IEEE Trans. Smart Grid 2018, 9, 6961–6971. [Google Scholar] [CrossRef]
- Zhang, P.; Jia, Y.; Gao, J.; Song, W.; Leung, H. Short-Term Rainfall Forecasting Using Multi-Layer Perceptron. IEEE Trans. Big Data 2020, 6, 93–106. [Google Scholar] [CrossRef]
- Gong, X.; Cardenas-Barrera, J.L.; Castillo-Guerra, E.; Cao, B.; Saleh, S.A.; Chang, L. Bottom-Up Load Forecasting with Markov-Based Error Reduction Method for Aggregated Domestic Electric Water Heaters. IEEE Trans. Ind. Appl. 2019, 55, 6401–6413. [Google Scholar] [CrossRef]
- Zhang, C.-Y.; Chen, C.L.P.; Gan, M.; Chen, L. Predictive Deep Boltzmann Machine for Multiperiod Wind Speed Forecasting. IEEE Trans. Sustain. Energy 2015, 6, 1416–1425. [Google Scholar] [CrossRef]
- Hinton, G.E.; Osindero, S.; Teh, Y.-W. A Fast Learning Algorithm for Deep Belief Nets. Neural Comput. 2006, 18, 1527–1554. [Google Scholar] [CrossRef]
- Ouyang, T.; He, Y.; Li, H.; Sun, Z.; Baek, S. Modeling and Forecasting Short-Term Power Load With Copula Model and Deep Belief Network. IEEE Trans. Emerg. Top. Comput. Intell. 2019, 3, 127–136. [Google Scholar] [CrossRef]
- Barra, S.; Carta, S.M.; Corriga, A.; Podda, A.S.; Recupero, D.R. Deep Learning and Time Series-to-Image Encoding for Financial Forecasting. IEEE CAA J. Autom. Sin. 2020, 7, 683–692. [Google Scholar] [CrossRef]
- Tang, X.; Dai, Y.; Liu, Q.; Dang, X.; Xu, J. Application of Bidirectional Recurrent Neural Network Combined with Deep Belief Network in Short-Term Load Forecasting. IEEE Access 2019, 7, 160660–160670. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Liang, R.; Kong, F.; Xie, Y.; Tang, G.; Cheng, J. Real-Time Speech Enhancement Algorithm Based on Attention LSTM. IEEE Access 2020, 8, 48464–48476. [Google Scholar] [CrossRef]
- Poornima, S.; Pushpalatha, M. Prediction of Rainfall Using Intensified LSTM Based Recurrent Neural Network with Weighted Linear Units. Atmosphere 2019, 10, 668. [Google Scholar] [CrossRef]
- Zhao, X.; Chen, Y.; Guo, J.; Zhao, D. A Spatial-Temporal Attention Model for Human Trajectory Prediction. IEEE CAA J. Autom. Sin. 2020, 7, 965–974. [Google Scholar] [CrossRef]
- Tan, M.; Yuan, S.; Li, S.; Su, Y.; Li, H.; He, F.H. Ultra-Short-Term Industrial Power Demand Forecasting Using LSTM Based Hybrid Ensemble Learning. IEEE Trans. Power Syst. 2020, 35, 2937–2948. [Google Scholar] [CrossRef]
- Mutavhatsindi, T.; Sigauke, C.; Mbuvha, R. Forecasting Hourly Global Horizontal Solar Irradiance in South Africa Using Machine Learning Models. IEEE Access 2020, 8, 198872–198885. [Google Scholar] [CrossRef]
- Wang, K.; Qi, X.; Liu, H. Photovoltaic Power Forecasting Based LSTM-Convolutional Network. Energy 2019, 189, 116225. [Google Scholar] [CrossRef]
- Wang, K.; Qi, X.; Liu, H. A Comparison of Day-Ahead Photovoltaic Power Forecasting Models Based on Deep Learning Neural Network. Appl. Energy 2019, 251, 113315. [Google Scholar] [CrossRef]
- Sun, Z.; Zhao, M. Short-Term Wind Power Forecasting Based on VMD Decomposition, ConvLSTM Networks and Error Analysis. IEEE Access 2020, 8, 134422–134434. [Google Scholar] [CrossRef]
- Alhussein, M.; Aurangzeb, K.; Haider, S.I. Hybrid CNN-LSTM Model for Short-Term Individual Household Load Forecasting. IEEE Access 2020, 8, 180544–180557. [Google Scholar] [CrossRef]
- Zhang, G.; Tan, F.; Wu, Y. Ship Motion Attitude Prediction Based on an Adaptive Dynamic Particle Swarm Optimization Algorithm and Bidirectional LSTM Neural Network. IEEE Access 2020, 8, 90087–90098. [Google Scholar] [CrossRef]
- Saeed, A.; Li, C.; Danish, M.; Rubaiee, S.; Tang, G.; Gan, Z.; Ahmed, A. Hybrid Bidirectional LSTM Model for Short-Term Wind Speed Interval Prediction. IEEE Access 2020, 8, 182283–182294. [Google Scholar] [CrossRef]
- Shih, S.Y.; Sun, F.K.; Lee, H.Y. Temporal Pattern Attention for Multivariate Time Series Forecasting. Mach. Learn. 2019, 108, 1421–1441. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bi-LSTM-TPA | LSTM | SVM | |
|---|---|---|---|
| MSE | 8.01 × 10−5 | 1.48 × 10−4 | 3.26 × 10−4 |
| MAPE (%) | 12.0 | 16.0 | 27.9 |
| MAE | 0.007 | 0.010 | 0.017 |
| SVM | LSTM | |
|---|---|---|
| PMSE (%) | 75.4 | 45.8 |
| PMAPE (%) | 56.6 | 25.0 |
| PMAE (%) | 58.8 | 30.0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Wang, H.; Zou, D.; Fu, H. Ship Roll Prediction Algorithm Based on Bi-LSTM-TPA Combined Model. J. Mar. Sci. Eng. 2021, 9, 387. https://doi.org/10.3390/jmse9040387
Wang Y, Wang H, Zou D, Fu H. Ship Roll Prediction Algorithm Based on Bi-LSTM-TPA Combined Model. Journal of Marine Science and Engineering. 2021; 9(4):387. https://doi.org/10.3390/jmse9040387
Chicago/Turabian StyleWang, Yuchao, Hui Wang, Dexin Zou, and Huixuan Fu. 2021. "Ship Roll Prediction Algorithm Based on Bi-LSTM-TPA Combined Model" Journal of Marine Science and Engineering 9, no. 4: 387. https://doi.org/10.3390/jmse9040387
APA StyleWang, Y., Wang, H., Zou, D., & Fu, H. (2021). Ship Roll Prediction Algorithm Based on Bi-LSTM-TPA Combined Model. Journal of Marine Science and Engineering, 9(4), 387. https://doi.org/10.3390/jmse9040387