
Imbalance Fault Classification Based on VMD Denoising and S-LDA for Variable-Speed Marine Current Turbine





Abstract
1. Introduction
2. Problem Description
2.1. Effect of Variable Marine Current
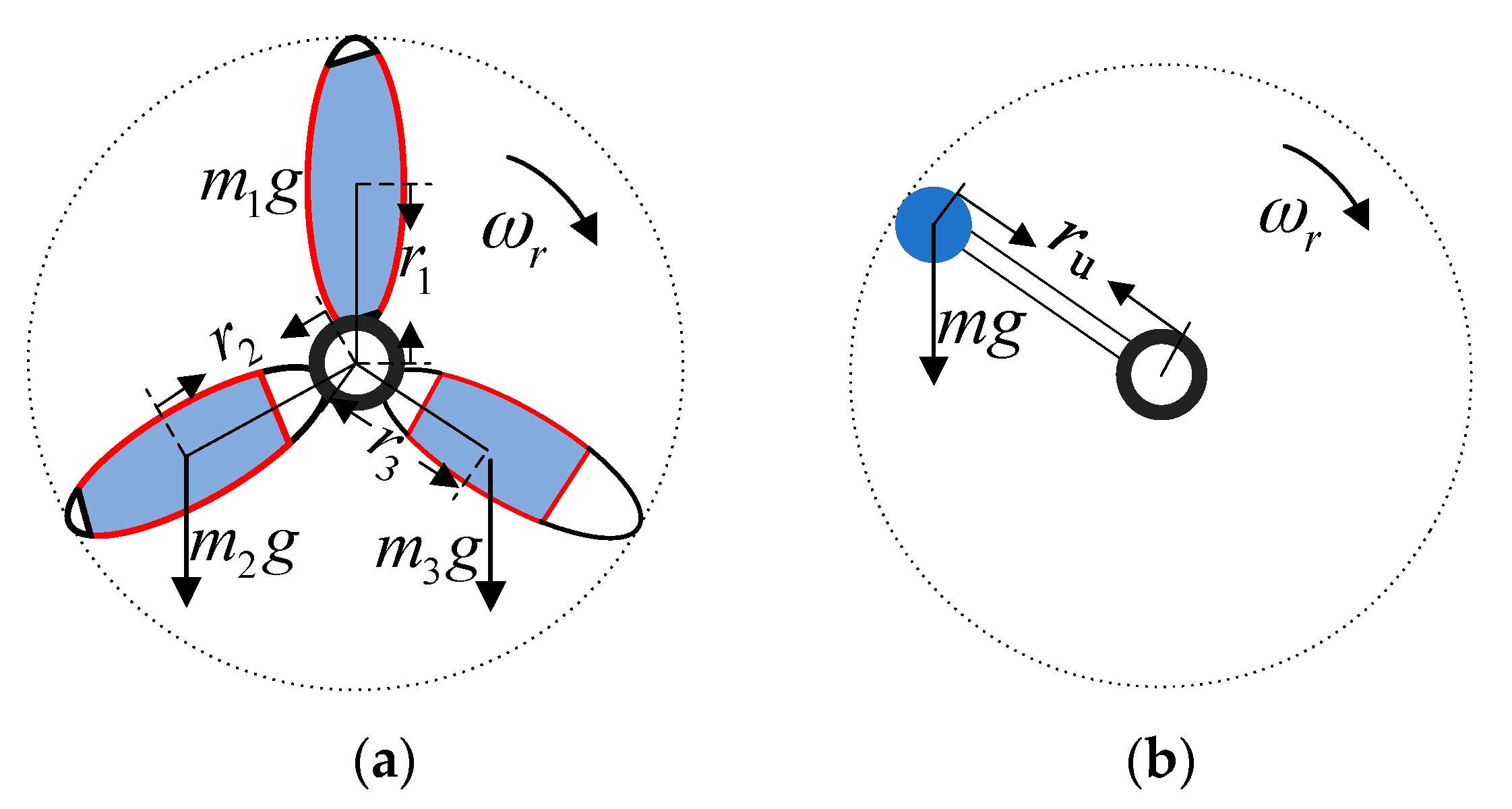
2.2. Effect of MCT Imbalance Fault
3. The VMD Denoising and S-LDA Method for MCT Imbalance Fault
3.1. Estimate Instantaneous Frequency Based on HT
3.2. VMD Denoising Method for Instantaneous Frequency
3.2.1. Constructing the Variational Problem
3.2.2. Feature Selection Based on MIC
3.3. S-LDA Is Used to Classify the Fault Severities Based on the Samples of Power Signals
3.3.1. Preliminary Screening by Passband Frequency
3.3.2. Dimension Reduction Based on LDA
3.3.3. Fault Classification Based on Probability Mode
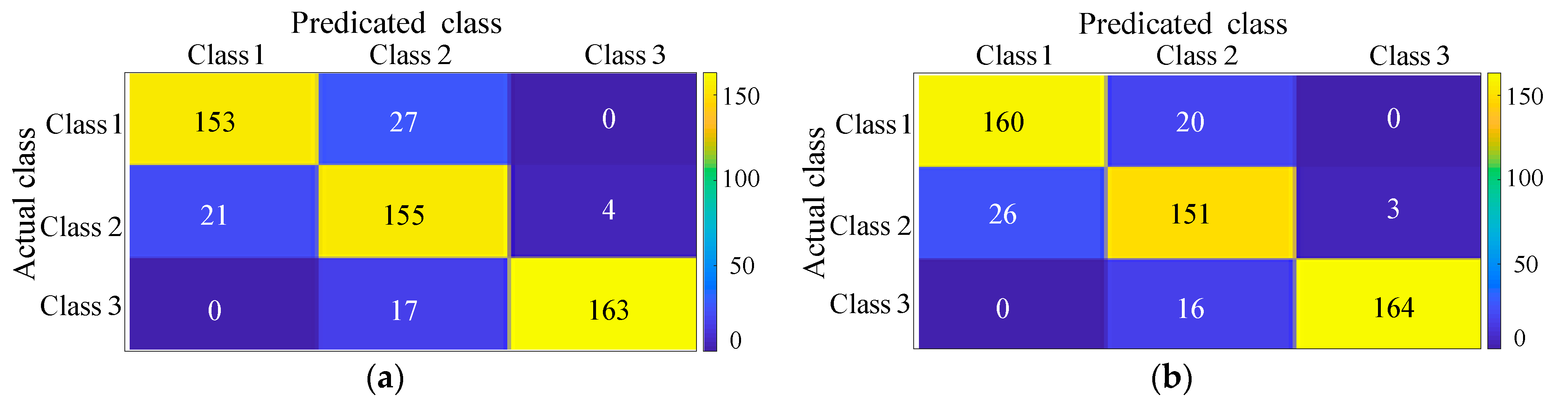
4. Experimental Results and Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rivera, G.; Felix, A.; Mendoza, E. A Review on Environmental and Social Impacts of Thermal Gradient and Tidal Currents Energy Conversion and Application to the Case of Chiapas, Mexico. Int. J. Environ. Res. Public Health 2020, 17, 7791. [Google Scholar] [CrossRef] [PubMed]
- Chen, H.; Tang, T.; Ait-Ahmed, N. Attraction, Challenge and Current Status of Marine Current Energy. IEEE Access 2018, 6, 12665–12685. [Google Scholar] [CrossRef]
- Li, Y.; Guo, Q.; Ma, X. Study of an electromagnetic ocean wave energy harvester driven by an efficient swing body towards the self-powered ocean buoy application. IEEE Access 2019, 7, 129758–129769. [Google Scholar] [CrossRef]
- Saidi, L.; Benbouzid, M.; Diallo, D.; Amirat, Y.; Elbouchikhi, E.; Wang, T. PMSG-based Tidal Current Turbine Biofouling Diagnosis using Stator Current Bispectrum Analysis. In Proceedings of the IECON 2019—45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019; pp. 6998–7003. [Google Scholar]
- Vinagre, P.A.; Simas, T.; Cruz, E. Marine Biofouling: A European Database for the Marine Renewable Energy Sector. J. Mar. Sci. Eng. 2020, 8, 495. [Google Scholar] [CrossRef]
- Hyun, B.; Kim, J.M.; Jang, P.G.; Jang, M.C.; Choi, K.H.; Lee, K.; Yang, E.J.; Noh, J.H.; Shin, K. The Effects of Ocean Acidification and Warming on Growth of a Natural Community of Coastal Phytoplankton. J. Mar. Sci. Eng. 2020, 8, 821. [Google Scholar] [CrossRef]
- Haddad, R.Z.; Strangas, E.G. On the Accuracy of Fault Detection and Separation in Permanent Magnet Synchronous Machines Using MCSA/MVSA and LDA. IEEE Trans. Energy Convers. 2016, 31, 924–934. [Google Scholar] [CrossRef]
- Allmark, M.; Grosvenor, R.; Prickett, P. An approach to the characterisation of the performance of a tidal stream turbine. Renew. Energy 2017, 111, 849–860. [Google Scholar] [CrossRef]
- Allmark, M.; Grosvenor, R.; Byrne, C. Condition Monitoring of a Tidal Stream Turbine: Development of an Experimental Methodology. In Proceedings of the 10th European Wave and Tidal Energy Conference, Aalborg, Denmark, 2 September 2013. [Google Scholar] [CrossRef]
- Allmark, M.; Prickett, P.; Grosvenor, R. Detection of tidal stream turbine rotor imbalance faults for turbulent flow conditions and optimal tip speed ratio control. In Proceedings of the 12th European Wave and Tidal Energy Conference (EWTEC), Cork, Ireland, 27 August–1 September 2017. [Google Scholar]
- Ordonezsanchez, S.; Porter, K.; Ellis, R. Numerical modelling techniques to predict rotor imbalance problems in tidal stream turbines. In Proceedings of the 12th European Wave and Tidal Energy Conference, Cork, Ireland, 27 August 2017. [Google Scholar]
- Xie, T.; Wang, T.; He, Q.; Diallo, D.; Claramunt, C. A review of current issues of marine current turbine blade fault detection. Ocean Eng. 2020, 218, 108194. [Google Scholar] [CrossRef]
- Hernandez, C.; Luis, J.; Almanza-Ojeda, D.L.; Ledesma, S. Quaternion Signal Analysis Algorithm for Induction Motor Fault Detection. IEEE Trans. Ind. Electron. 2019, 66, 1. [Google Scholar]
- Helmi, H.; Forouzantabar, A. Rolling bearing fault detection of electric motor using time domain and frequency domain features extraction and ANFIS. IET Electr. Power Appl. 2019, 13, 662–669. [Google Scholar] [CrossRef]
- Hassan, O.E.; Amer, M.; Abdelsalam, A.K. Induction motor broken rotor bar fault detection techniques based on fault signature analysis—A review. IET Electr. Power Appl. 2018, 12, 895–907. [Google Scholar] [CrossRef]
- Chen, P.; Zhao, X.; Zhu, Q. A novel classification method based on ICGOA-KELM for fault diagnosis of rolling bearing. Appl. Intell. 2020, 50, 2833–2847. [Google Scholar] [CrossRef]
- Chen, S.; Yang, G. Review of vibration fault diagnosis methods for hydraulic turbines. Electr. Eng. 2019, 20, 1–5. [Google Scholar]
- Park, Y. Stray Flux Monitoring for Reliable Detection of Rotor Faults under the Influence of Rotor Axial Air Ducts. IEEE Trans. Ind. Electron. 2019, 66, 7561–7570. [Google Scholar] [CrossRef]
- Borges, F. An Unsupervised Method based on Support Vector Machines and Higher-Order Statistics for Mechanical Faults Detection. IEEE Lat. Am. Trans. 2020, 18, 1093–1101. [Google Scholar] [CrossRef]
- Zandi, O.; Poshtan, J. Fault Diagnosis of Brushless DC Motors Using Built-In Hall Sensors. IEEE Sens. J. 2019, 19, 8183–8190. [Google Scholar] [CrossRef]
- Yang, M.; Chai, N.; Liu, Z.; Ren, B.; Xu, D. Motor Speed Signature Analysis for Local Bearing Fault Detection With Noise Cancellation Based on Improved Drive Algorithm. IEEE Trans. Ind. Electron. 2020, 67, 4172–4182. [Google Scholar] [CrossRef]
- Zheng, Y.; Wang, T.; Xin, B.; Xie, T.; Wang, Y. A Sparse Autoencoder and Softmax Regression Based Diagnosis Method for the Attachment on the Blades of Marine Current Turbine. Sensors 2019, 19, 826. [Google Scholar] [CrossRef] [PubMed]
- Wen, P.; Wang, T.; Xin, B. Blade imbalanced fault diagnosis for marine current turbine based on sparse autoencoder and softmax regression. In Proceedings of the 2018 33rd Youth Academic Annual Conference of Chinese Association of Automation (YAC), Nanjing, China, 18–20 May 2018; pp. 246–251. [Google Scholar]
- Rani, M.; Singal, P. Networks of Underwater Sensor Wireless Systems: Latest Problems and Threats. Int. J. Wirel. Netw. Broadband Technol. 2021, 10, 59–69. [Google Scholar] [CrossRef]
- Murugesan, I.; Sathish, K. Gradient Ascent Optimization for Fault Detection in Electrical Power System Based on Wavelet Transformation. Curr. Signal Transduct. Ther. 2020, 15, 294–302. [Google Scholar] [CrossRef]
- Sonje, D.M.; Kundu, P.; Chowdhury, A. A Novel Approach for Sensitive Inter-turn Fault Detection in Induction Motor under Various Operating Conditions. Arab. J. Sci. Eng. 2019, 44, 6887–6900. [Google Scholar] [CrossRef]
- Trachi, Y.; Elbouchikhi, E.; Choqueuse, V. Induction Machines Fault Detection Based on Subspace Spectral Estimation. IEEE Trans. Ind. Electron. 2016, 63, 5641–5651. [Google Scholar] [CrossRef]
- El Bouchikhi, E.H.; Choqueuse, V.; Benbouzid, M.; Charpentier, J.F. Induction machine fault detection enhancement using a stator current high resolution spectrum. In Proceedings of the IECON 2012—38th Annual Conference on IEEE Industrial Electronics Society, Montreal, QC, Canada, 25–28 October 2012; pp. 3913–3918. [Google Scholar]
- Yao, G.; Pang, S.; Ying, T. VPSO-SVM based Open-Circuit Faults Diagnosis of Five-Phase Marine Current Generator Sets. Energies 2020, 13, 6004. [Google Scholar] [CrossRef]
- Li, Z.; Wang, T.; Zhang, M.; Wang, Y.; Diallo, D. An Imbalance Fault Detection Method for MCTs Using Voltage Signal. In Proceedings of the 2019 CAA Symposium on Fault Detection, Supervision and Safety for Technical Processes (SAFEPROCESS), Xiamen, China, 5–7 July 2019; pp. 401–405. [Google Scholar] [CrossRef]
- Choqueuse, V.; Belouchrani, A.; Auger, F.; Benbouzid, M. Frequency and Phasor Estimations in Three-Phase Systems: Maximum Likelihood Algorithms and Theoretical Performance. IEEE Trans. Smart Grid 2019, 10, 3248–3258. [Google Scholar] [CrossRef]
- Li, Z.; Wang, T.; Wang, Y.; Amirat, Y.; Benbouzid, M.; Diallo, D. A Wavelet Threshold Denoising-Based Imbalance Fault Detection Method for Marine Current Turbines. IEEE Access 2020, 8, 29815–29825. [Google Scholar] [CrossRef]
- Tajik, M.; Movasagh, S.; Shoorehdeli, M.A. Gas turbine shaft unbalance fault detection by using vibration data and neural networks. In Proceedings of the 2015 3rd RSI International Conference on Robotics and Mechatronics (ICROM), Tehran, Iran, 7–9 October 2015; p. 15686679. [Google Scholar] [CrossRef]
- Zhang, M.; Wang, T.; Tang, T. An imbalance fault detection method based on data normalization and EMD for marine current turbines. ISA Trans. 2017, 68, 302–312. [Google Scholar] [CrossRef]
- Zhang, M.; Wang, T.; Tang, T. Blade Imbalance Fault Detection Method for Direct-Driven Marine Current Turbine with Permanent Magnet Synchronous Generator. Trans. China Electrotech. Soc. 2018, 33, 38–47. [Google Scholar]
- Zhang, M.; Wang, T.; Tang, T. Imbalance fault detection of marine current turbine under condition of wave and turbulence. In Proceedings of the IECON 2016-42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 23–26 October 2016; p. 16556707. [Google Scholar] [CrossRef]
- Xie, T.; Wang, T.; Diallo, D. Imbalance Fault Detection Based on the Integrated Analysis Strategy for Marine Current Turbines under Variable Current Speed. Entropy 2020, 22, 1069. [Google Scholar] [CrossRef]
- Wu, X.; Peng, Z.; Ren, J.; Cheng, C.; Zhang, W.; Wang, D. Rub-Impact Fault Diagnosis of Rotating Machinery Based on 1-D Convolutional Neural Networks. IEEE Sens. J. 2020, 20, 8349–8363. [Google Scholar] [CrossRef]
- Tang, Y. Rotor Blade Pitch Imbalance Fault Detection for Variable-Speed Marine Current Turbines via Generator Power Signal Analysis. Ocean Eng. 2020, 223, 108666. [Google Scholar]
- Xu, K.; Wren, P.A.; Ma, Y. Tidal and Storm Impacts on Hydrodynamics and Sediment Dynamics in an Energetic Ebb Tidal Delta. J. Mar. Sci. Eng. 2020, 8, 810. [Google Scholar] [CrossRef]
- Mycek, P.; Gaurier, B.; Germain, G.; Pinon, G.; Rivoalen, E. Experimental study of the turbulence intensity effects on marine current turbines behaviour. Part I: One single turbine. Renew. Energy 2014, 66, 729–746. [Google Scholar] [CrossRef]
- Zhou, Z.; Benbouzid, M.; Charpentier, J.F.; Scuiller, F.; Tang, T. Developments in large marine current turbine technologies a review. Renew. Sustain. Energy Rev. 2017, 71, 852–858. [Google Scholar] [CrossRef]
- Gemechu, A.; Cui, G.; Kong, L. Beampattern Synthesis with Sidelobe Control and Applications. IEEE Trans. Antennas Propag. 2020, 68, 297–310. [Google Scholar] [CrossRef]
- Li, C.; Shao, Y.; Yin, W. Robust and Sparse Linear Discriminant Analysis via an Alternating Direction Method of Multipliers. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 915–926. [Google Scholar] [CrossRef] [PubMed]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Stator resistance | 3.3 Ω |
| q-axis inductance | 11.875 mH |
| d-axis inductance | 11.875 mH |
| Permanent magnet flux | 0.1775 Wb |
| Pole pair number | 8 |
| System total inertia | 3.5 kg m2 |
| Radius of turbine blade | 0.3 m |
| Mass of single blade | 1 kg |
| S-LDA | LDA | KNN | SVM | |
|---|---|---|---|---|
| Accuracy | 92.04% | 33.33% | 87.22% | 87.96% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, J.; Xie, T.; Shi, M.; He, Q.; Wang, T.; Amirat, Y. Imbalance Fault Classification Based on VMD Denoising and S-LDA for Variable-Speed Marine Current Turbine. J. Mar. Sci. Eng. 2021, 9, 248. https://doi.org/10.3390/jmse9030248
Wei J, Xie T, Shi M, He Q, Wang T, Amirat Y. Imbalance Fault Classification Based on VMD Denoising and S-LDA for Variable-Speed Marine Current Turbine. Journal of Marine Science and Engineering. 2021; 9(3):248. https://doi.org/10.3390/jmse9030248
Chicago/Turabian StyleWei, Jiajia, Tao Xie, Ming Shi, Qianqian He, Tianzhen Wang, and Yassine Amirat. 2021. "Imbalance Fault Classification Based on VMD Denoising and S-LDA for Variable-Speed Marine Current Turbine" Journal of Marine Science and Engineering 9, no. 3: 248. https://doi.org/10.3390/jmse9030248
APA StyleWei, J., Xie, T., Shi, M., He, Q., Wang, T., & Amirat, Y. (2021). Imbalance Fault Classification Based on VMD Denoising and S-LDA for Variable-Speed Marine Current Turbine. Journal of Marine Science and Engineering, 9(3), 248. https://doi.org/10.3390/jmse9030248