
Improving Near Miss Detection in Maritime Traffic in the Northern Baltic Sea from AIS Data



Abstract
1. Introduction
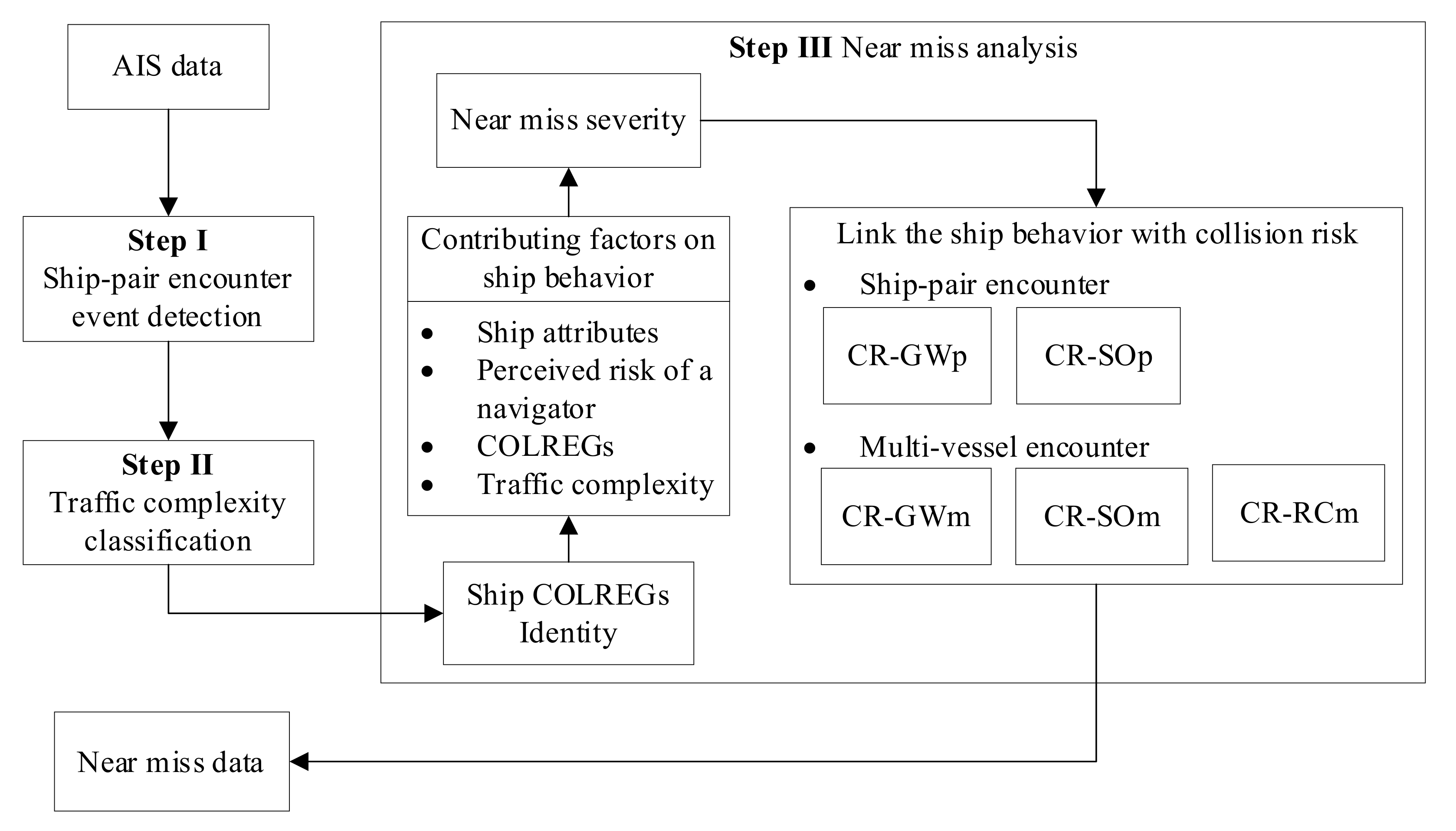
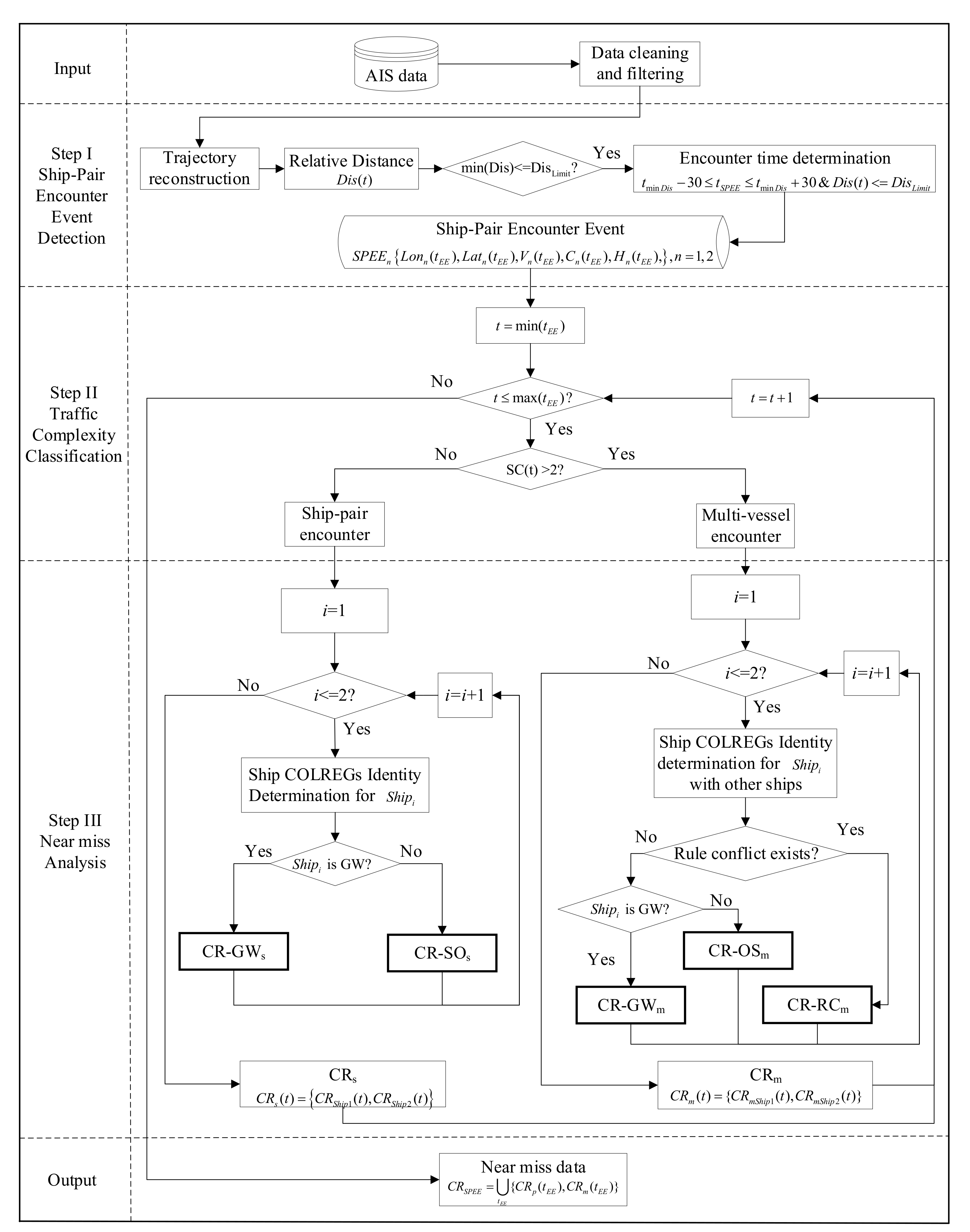
2. Materials and Methods
2.1. Step I: Ship Pair Encounter Event Detection
2.2. Step II: Traffic Complexity Classification
2.3. Step III: Near Miss Analysis
2.3.1. Ship COLREGs Identity
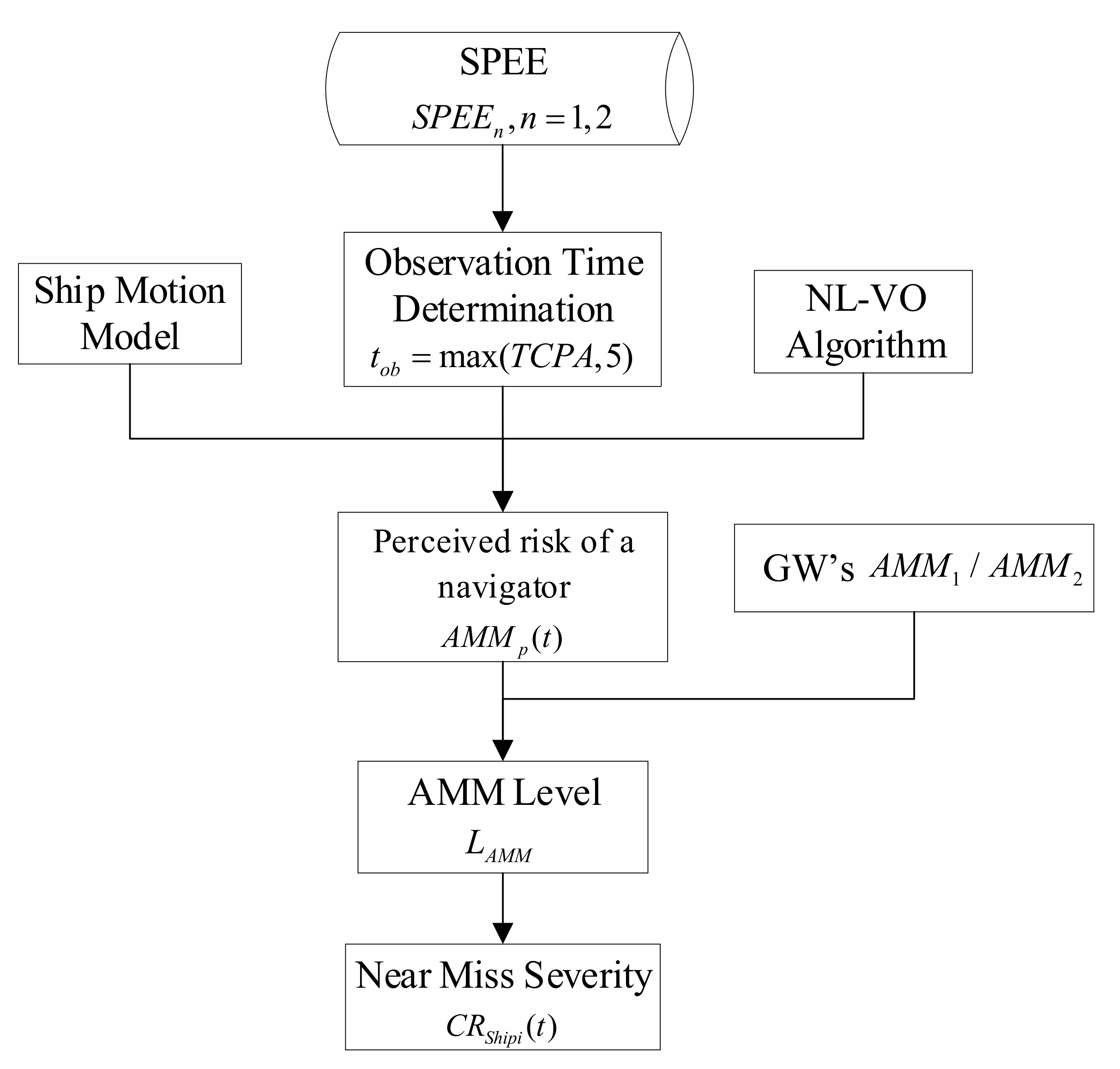
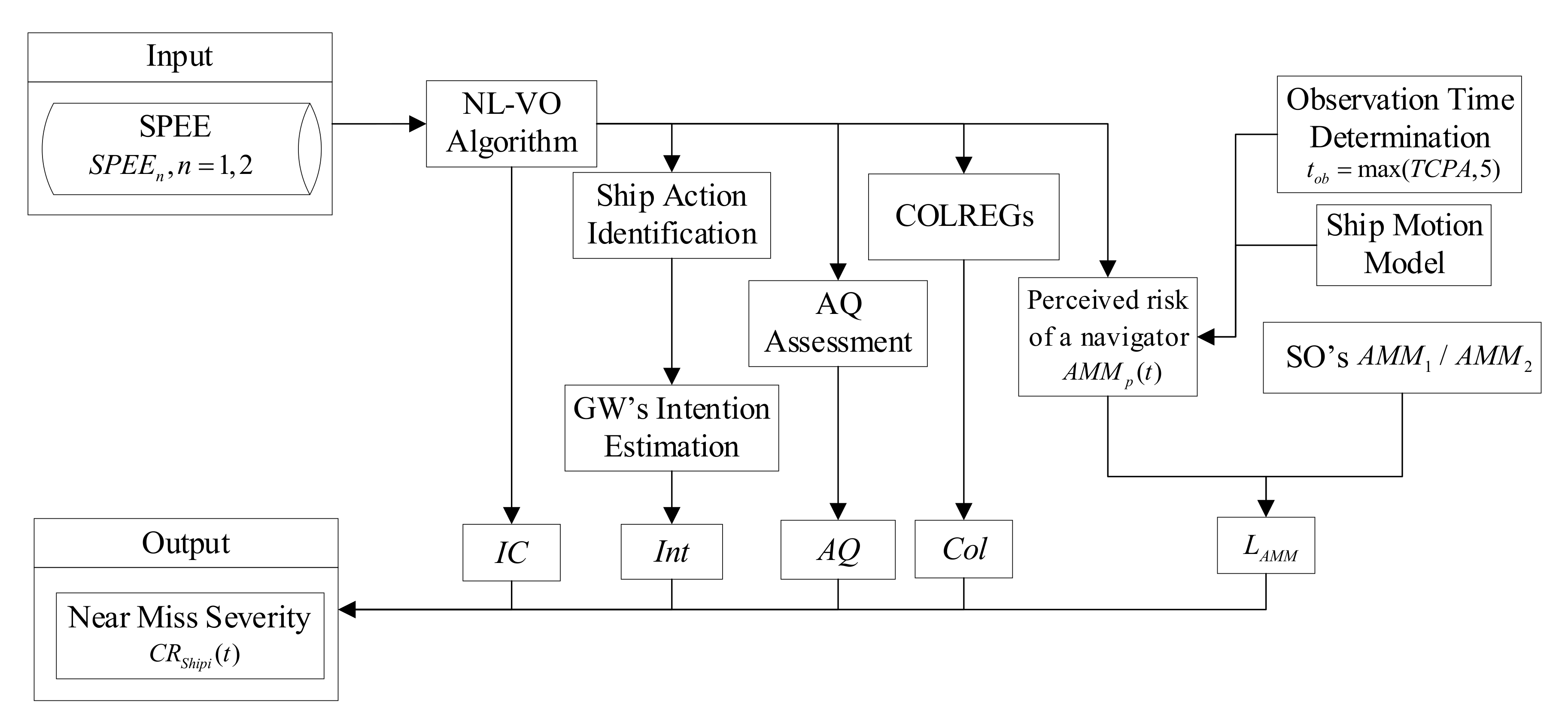
2.3.2. Near Miss Severity
Near Miss Severity of a GW
Near Miss Severity of a SO
2.3.3. Near Miss Analysis in the Ship Pair Encounter Scenario
Near Miss Severity of a GW in the Ship Pair Encounter Scenario
Near Miss Severity of a SO in the Ship pair Encounter Scenario
2.3.4. Near Miss Analysis in the Multi-Vessel Encounter Scenario
Near Miss Severity of a GW in the Multi-Vessel Encounter Scenario with No Rule Conflict
Near Miss Severity of a SO in the Multi-Vessel Encounter Scenario with No Rule Conflict
Near Miss Severity of a Ship in the Multi-Vessel Encounter Scenario with Rule Conflict
3. Application
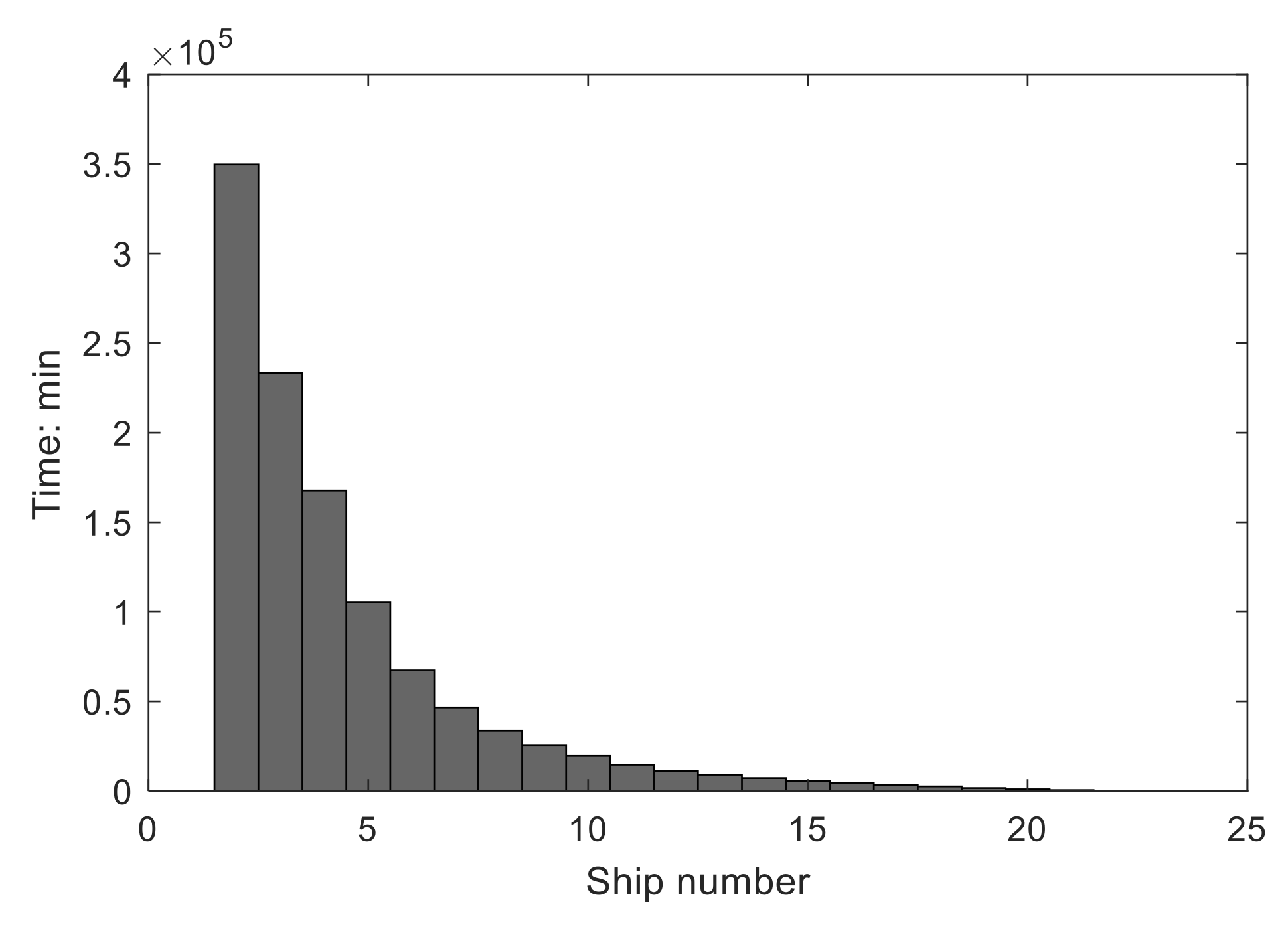
3.1. Traffic Profile
3.1.1. Ship Pair Encounter Event Detection
3.1.2. Traffic Complexity Classification
3.2. Demonstration of Near Miss Analysis
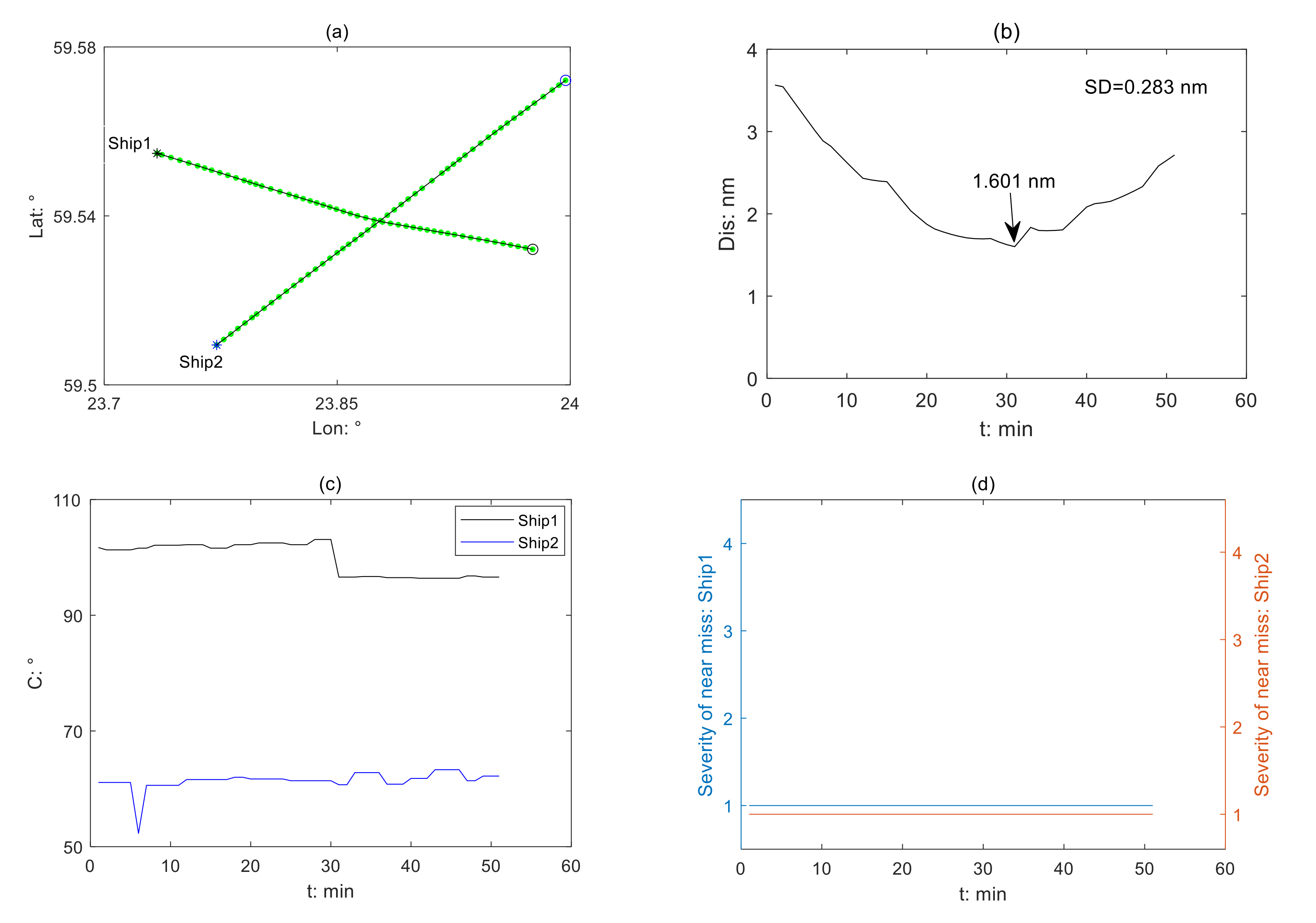
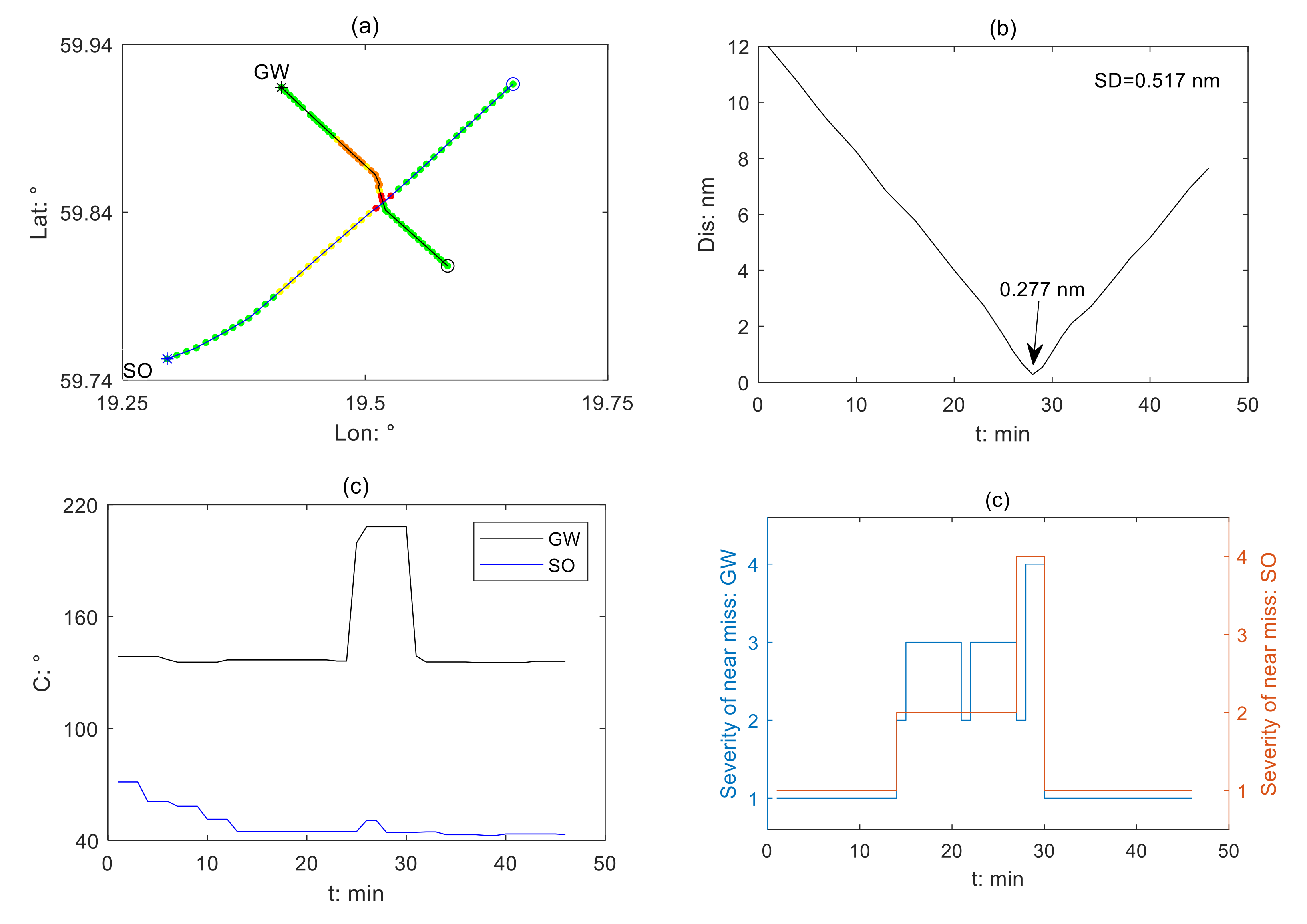
3.2.1. Ship Pair Encounter Scenario
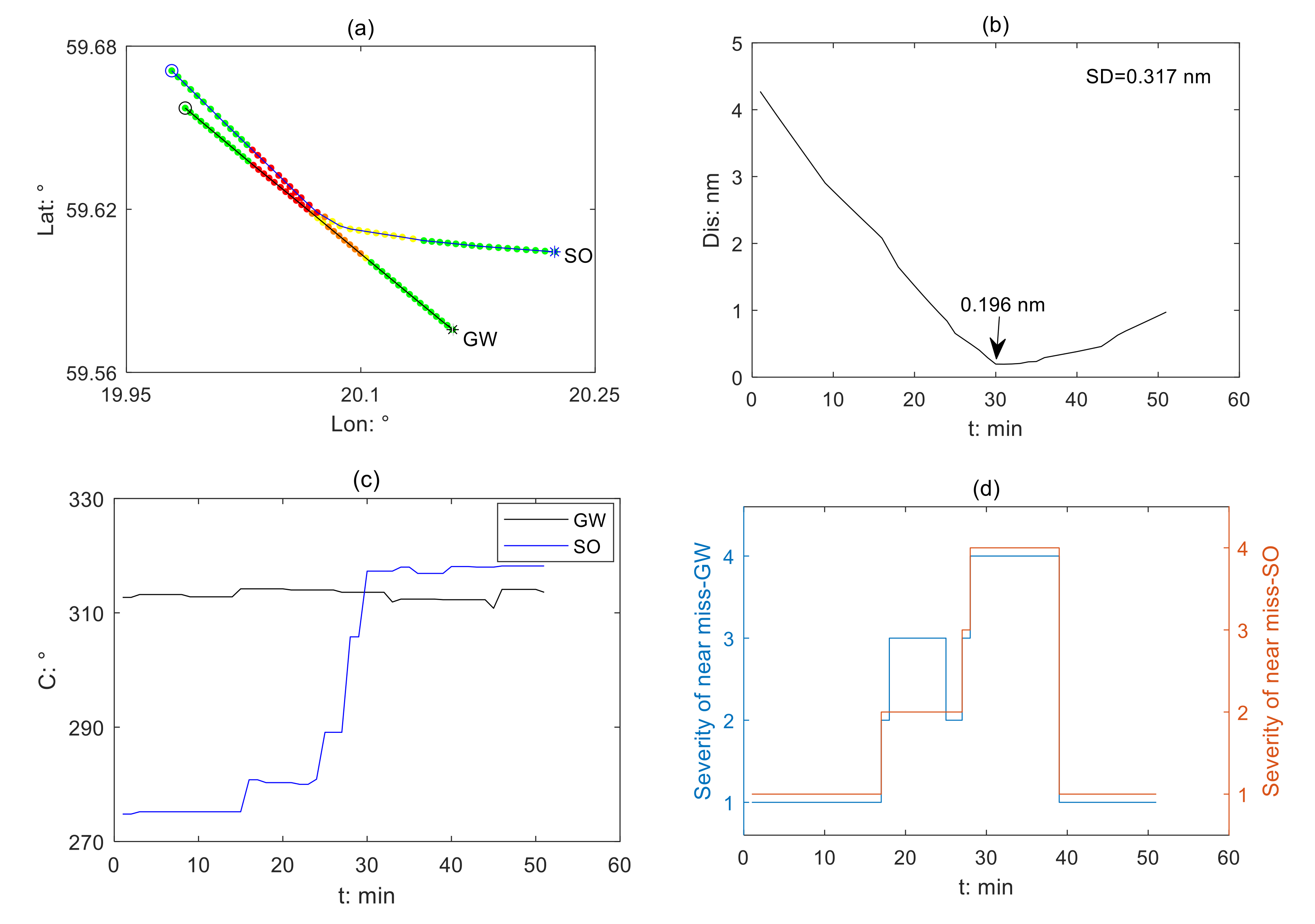
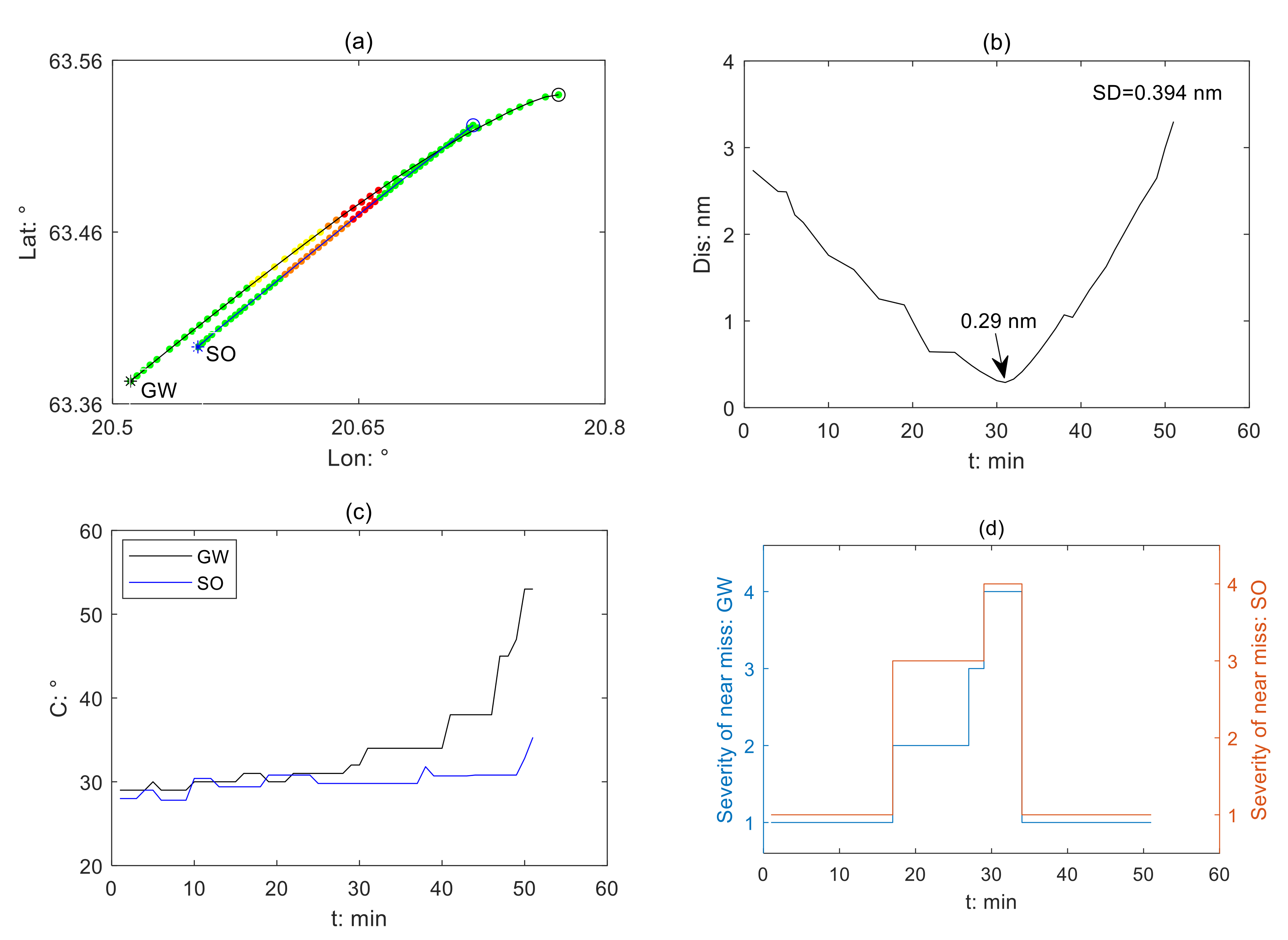
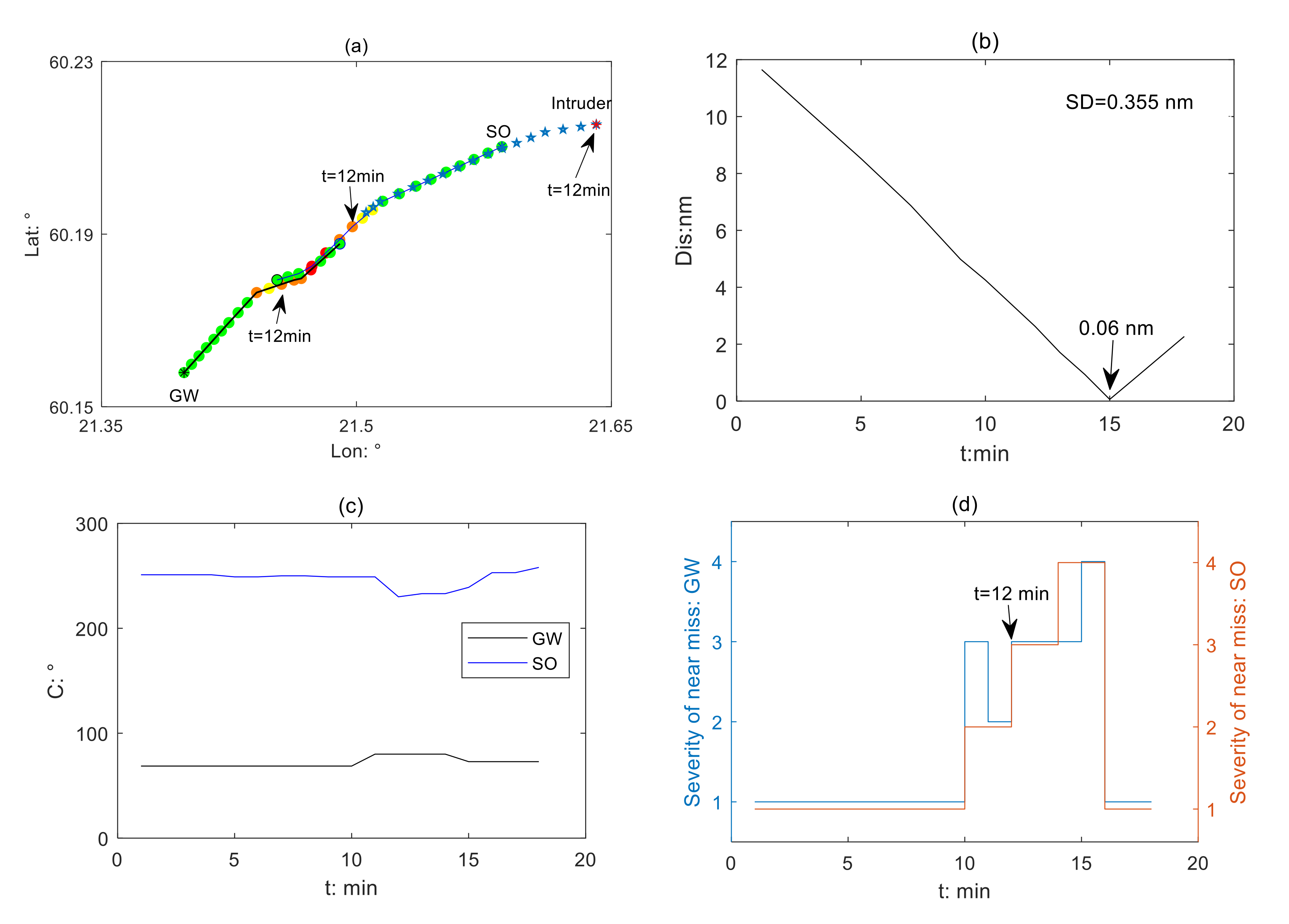
3.2.2. Multi-Vessel Encounter Scenario
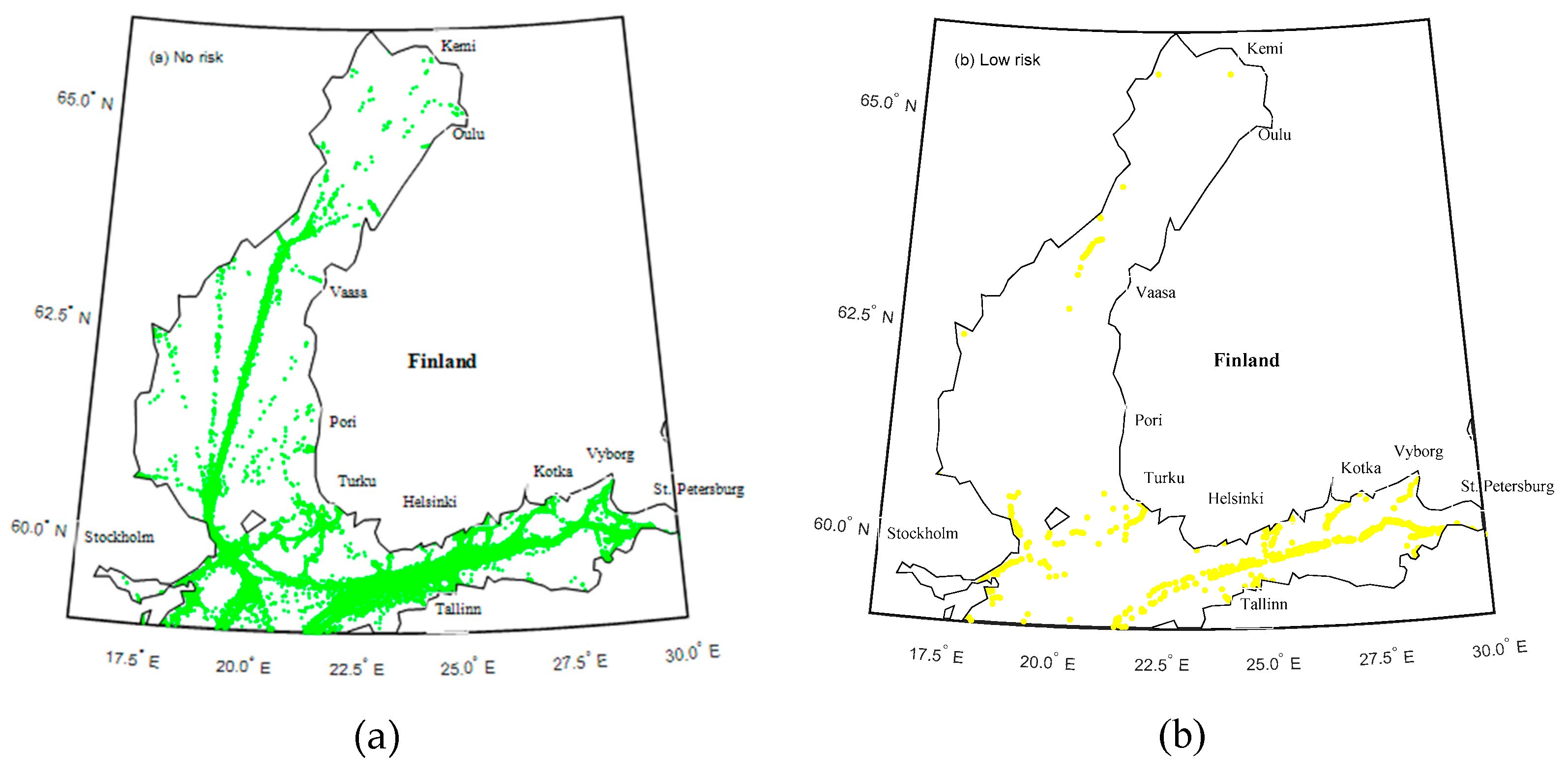
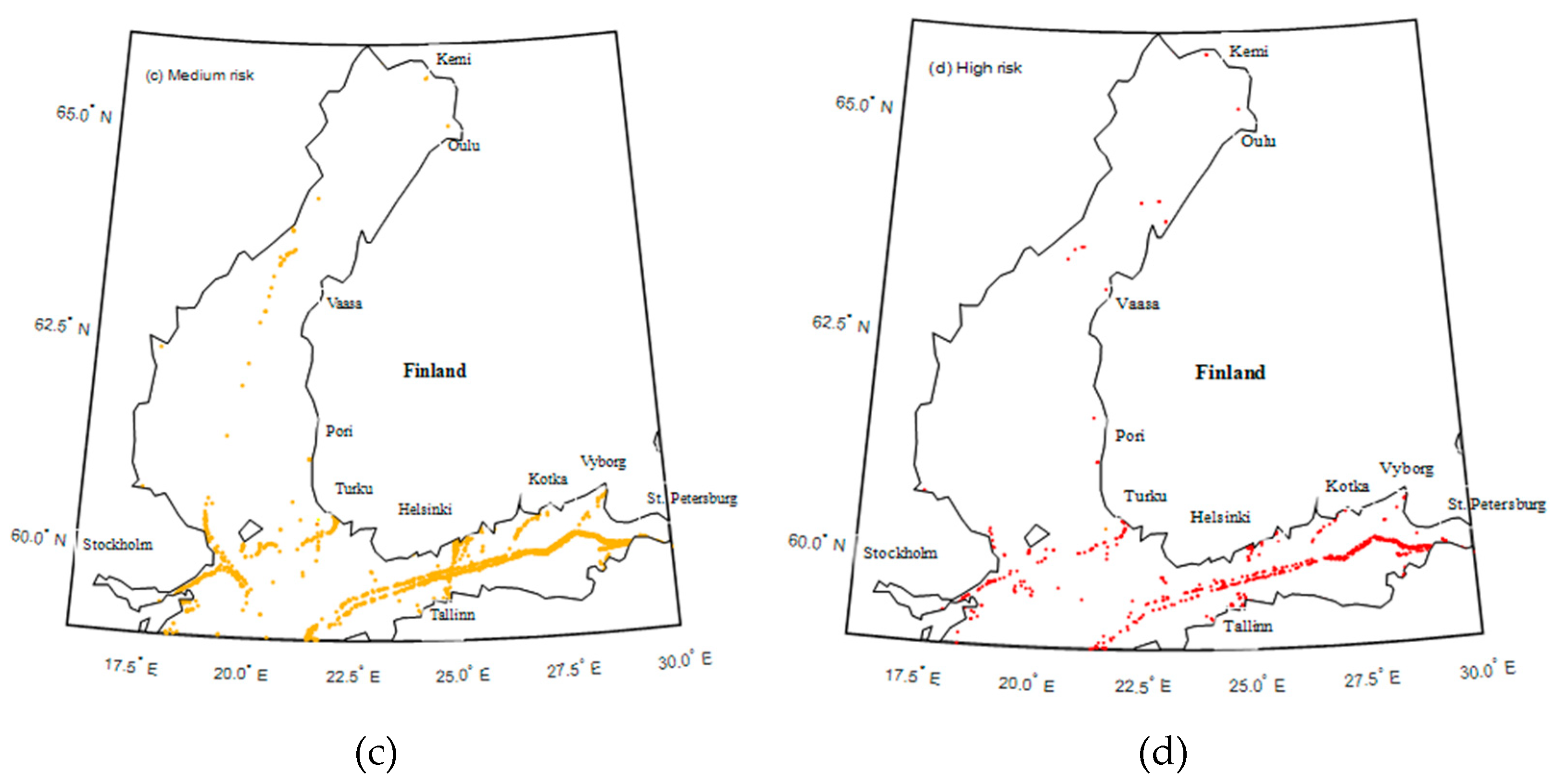
3.3. Near Miss Detection Results
3.4. Serious Encounter Analysis
4. Discussion
4.1. Features and Advantages of the Proposed Method
4.2. Limitations and Future Improvements
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| Abbreviations | |||
| AIS | automatic identification system | MMSI | Maritime Mobile Service Identity |
| AMM | available maneuvering margin | NLVO | non-linear VO |
| COLREGs | Convention on the International Regulations for Preventing Collisions at Sea | OS | own ship |
| CPA | Closet point of approach | RB | relative bearing |
| CR-GWm | collision risk module for a GW in the multi-vessel encounter scenario | RH | relative heading |
| CR-GWp | collision risk module for a GW in the ship pair encounter scenario | ROT | rate of turn |
| CR-RCm | collision risk module for a ship in the multi-vessel encounter scenario with rule conflict | SC | ship count |
| CR-SOm | collision risk module for a SO in the multi-vessel encounter scenario | SD | ship domain |
| CR-SOp | collision risk module for a SO in the ship pair encounter scenario | SO | stand-on ship |
| DP algorithm | Douglas–Peucker algorithm | SPEE | ship pair encounter event |
| GW | give-way ship | TS | target ship |
| IMO | International Maritime Organization | TCPA | time to CPA |
| MMG | Maneuvering Modeling Group | VCRO | vessel conflict ranking operator |
| Notations | |||
| value of calculated AMM | latitude | ||
| upper limit of AMM | longitude | ||
| lower limit of AMM | reachable ship velocity | ||
| ship action quality index | velocity obstacle zone in TS’s velocity space | ||
| Col | COLREGs scrutiny index | observation time | |
| ship course | moment of closet point of approach | ||
| collision risk of each ship of SPEE | time period of SPEE | ||
| distance limit | total available rudder angle | ||
| ship heading | adopted rudder angle that can eliminate the existing collision risk | ||
| conflict index | union of of all the surrounding ships | ||
| Int | ship action intention index | ship speed | |
| level of AMM | |||
References
- Kujala, P.; Hänninen, M.; Arola, T.; Ylitalo, J. Analysis of the marine traffic safety in the Gulf of Finland. Reliab. Eng. Syst. Saf. 2009, 94, 1349–1357. [Google Scholar] [CrossRef]
- Valdez Banda, O.A.; Goerlandt, F.; Montewka, J.; Kujala, P. A risk analysis of winter navigation in Finnish sea areas. Accid. Anal. Prev. 2015, 79, 100–116. [Google Scholar] [CrossRef] [PubMed]
- Lu, L.; Goerlandt, F.; Banda OA, V.; Kujala, P.; Höglund, A.; Arneborg, L. A Bayesian Network risk model for assessing oil spill recovery effectiveness in the ice-covered Northern Baltic Sea. Mar. Pollut. Bull. 2019, 139, 440–458. [Google Scholar] [CrossRef] [PubMed]
- Zhang, W.; Zou, Z.; Wang, J.; Du, L. Multi-ship following operation in ice-covered waters with consideration of inter-ship communication. Ocean Eng. 2020, 210, 107545. [Google Scholar] [CrossRef]
- HELCOM. Annual Report on Shipping Accidents in the Baltic Sea in 2013. 2014. Available online: https://helcom.fi/media/publications/Annual-report-on-shipping-accidents-in-the-Baltic-Sea-area-during-2013.pdf (accessed on 9 February 2021).
- HELCOM. Report on Shipping Accidents in the Baltic Sea from 2014 to 2017. 2018. Available online: http://www.helcom.fi/Lists/Publications/Report%20on%20shipping%20accidents%20in%20the%20Baltic%20Sea%20from%202014%20to%202017.pdf (accessed on 9 February 2021).
- Chen, X.; Xu, X.; Yang, Y.; Wu, H.; Tang, J.; Zhao, J. Augmented ship tracking under occlusion conditions from maritime surveillance videos. IEEE Access 2020, 8, 42884–42897. [Google Scholar] [CrossRef]
- Wang, L.; Li, Y.; Wan, Z.; Yang, Z.; Wang, T.; Guan, K.; Fu, L. Use of AIS data for performance evaluation of ship traffic with speed control. Ocean Eng. 2020, 204, 107259. [Google Scholar] [CrossRef]
- Zhang, M.; Zhang, D.; Fu, S.; Yan, X.; Goncharov, V. Safety distance modeling for ship escort operations in Arctic ice-covered waters. Ocean Eng. 2017, 146, 202–216. [Google Scholar] [CrossRef]
- Zhang, M.; Zhang, D.; Yao, H.; Zhang, K. A probabilistic model of human error assessment for autonomous cargo ships focusing on human–autonomy collaboration. Saf. Sci. 2020, 130, 104838. [Google Scholar] [CrossRef]
- Debnath, A.K.; Chin, H.C. Navigational traffic conflict technique: A proactive approach to quantitative measurement of collision risks in port waters. J. Navig. 2010, 63, 137–152. [Google Scholar] [CrossRef]
- Zhang, W.; Goerlandt, F.; Montewka, J.; Kujala, P. A method for detecting possible near miss ship collisions from AIS data. Ocean Eng. 2015, 107, 60–69. [Google Scholar] [CrossRef]
- Zhang, L.; Meng, Q.; Xiao, Z.; Fu, X. A novel ship trajectory reconstruction approach using AIS data. Ocean Eng. 2018, 159, 165–174. [Google Scholar] [CrossRef]
- Du, L.; Goerlandt, F.; Kujala, P. Review and analysis of methods for assessing maritime waterway risk based on non-accident critical events detected from AIS data. Reliab. Eng. Syst. Saf. 2020, 200, 106933. [Google Scholar] [CrossRef]
- Qu, X.; Meng, Q.; Suyi, L. Ship collision risk assessment for the Singapore Strait. Accid. Anal. Prev. 2011, 43, 2030–2036. [Google Scholar] [CrossRef] [PubMed]
- Goerlandt, F.; Montewka, J.; Lammi, H.; Kujala, P. Analysis of near collisions in the Gulf of Finland. In Advances in Safety, Reliability and Risk Management; Taylor & Francis Group: London, UK, 2012; pp. 2880–2886. [Google Scholar]
- Weng, J.; Xue, S. Ship collision frequency estimation in port fairways: A case study. J. Navig. 2015, 68, 602–618. [Google Scholar] [CrossRef]
- van Iperen, W.H. Classifying ship encounters to monitor traffic safety on the North Sea from AIS data. Transnav Int. J. Mar. Navig. Saf. Sea Transp. 2015, 9, 51–58. [Google Scholar] [CrossRef]
- Zhang, W.; Goerlandt, F.; Kujala, P.; Wang, Y. An advanced method for detecting possible near miss ship collisions from AIS data. Ocean Eng. 2016, 124, 141–156. [Google Scholar] [CrossRef]
- Zhang, W.; Kopca, C.; Tang, J.; Ma, D.; Wang, Y. A Systematic Approach for Collision Risk Analysis based on AIS Data. J. Navig. 2017, 70, 1117–1132. [Google Scholar] [CrossRef]
- Szłapczyński, R.; Niksa-Rynkiewicz, T. A framework of a ship domain-based near-miss detection method using mamdani neuro-fuzzy classification. Pol. Marit. Res. 2018, 25, 14–21. [Google Scholar] [CrossRef]
- Hörteborn, A.; Ringsberg, J.W.; Svanberg, M. A comparison of two definitions of ship domain for analysing near ship–ship collisions. In Developments in the Collision and Grounding of Ships and Offshore Structures: Proceedings of the 8th International Conference on Collision and Grounding of Ships and Offshore Structures (ICCGS 2019), Lisbon, Portugal, 21–23 October 2019; CRC Press: Boca Raton, FL, USA, 2019; p. 308. [Google Scholar]
- Wu, X.; Mehta, A.L.; Zaloom, V.A.; Craig, B.N. Analysis of waterway transportation in Southeast Texas waterway based on AIS data. Ocean Eng. 2016, 121, 196–209. [Google Scholar] [CrossRef]
- Chen, P.; Huang, Y.; Mou, J.; van Gelder, P.H.A.J.M. Ship collision candidate detection method: A velocity obstacle approach. Ocean Eng. 2018, 170, 186–198. [Google Scholar] [CrossRef]
- Du, L.; Banda, O.V.; Kujala, P. An intelligent method for real-time ship collision risk assessment and visualization. In Developments in the Collision and Grounding of Ships and Offshore Structures: Proceedings of the 8th International Conference on Collision and Grounding of Ships and Offshore Structures (ICCGS 2019), Lisbon, Portugal, 21–23 October 2019; CRC Press: Boca Raton, FL, USA, 2019; p. 293. [Google Scholar]
- Baldauf, M.; Mehdi, R.; Fischer, S.; Gluch, M. A Perfect Warning to avoid collisions at sea? Sci. J. Marit. Univ. Szczec. 2017, 49, 53–64. [Google Scholar]
- Mestl, T.; Tallakstad, K.T.; Castberg, R. Identifying and analyzing safety critical maneuvers from high resolution AIS data. Transnav Int. J. Mar. Navig. Saf. Sea Transp. 2016, 10, 69–77. [Google Scholar] [CrossRef]
- Baldauf, M.; Mehdi, R.; Deeb, H.; Schröder-Hinrichs, J.U.; Benedict, K.; Krüger, C.; Fischer, S.; Gluch, M. Manoeuvring areas to adapt ACAS for the maritime domain. Zesz. Nauk. Akad. Mor. Szczec. 2015, 43, 39–47. [Google Scholar]
- Montewka, J.; Hinz, T.; Kujala, P.; Matusiak, J. Probability modelling of vessel collisions. Reliab. Eng. Syst. Saf. 2010, 95, 573–589. [Google Scholar] [CrossRef]
- Zhuo, Y.; Tang, T. An intelligent decision support system to ship anti-collision in multi-ship encounter. In Proceedings of the 2008 7th World Congress on Intelligent Control and Automation, Chongqing, China, 25–27 June 2008; pp. 1066–1071. [Google Scholar]
- Du, L.; Goerlandt, F.; Valdez Banda, O.A.; Huang, Y.; Wen, Y.; Kujala, P. Improving stand-on ship’s situational awareness by estimating the intention of the give-way ship. Ocean Eng. 2020, 201, 107110. [Google Scholar] [CrossRef]
- COLREGs-Conventions on the International Regulations for Preventing Collision at Sea; International Maritime Organization (IMO): London, UK, 1972.
- Chauvin, C.; Lardjane, S. Decision making and strategies in an interaction situation: Collision avoidance at sea. Transp. Res. Part F Traffic Psychol. Behav. 2008, 11, 259–269. [Google Scholar] [CrossRef]
- Du, L.; Valdez Banda, O.A.; Goerlandt, F.; Huang, Y.; Kujala, P. A COLREG-compliant ship collision alert system for stand-on vessels. Ocean Eng. 2020, 218, 107866. [Google Scholar] [CrossRef]
- Huang, Y.; van Gelder, P.H.A.J.M. Collision risk measure for triggering evasive actions of maritime autonomous surface ships. Saf. Sci. 2020, 127, 104708. [Google Scholar] [CrossRef]
- Du, L.; Valdez Banda, O.A.; Huang, Y.; Goerlandt, F.; Kujala, P.; Zhang, W. An empirical ship domain based on evasive maneuver and perceived collision risk. Reliab. Eng. Syst. Saf. 2020. under review. [Google Scholar]
- Goerlandt, F.; Montewka, J.; Kuzmin, V.; Kujala, P. A risk-informed ship collision alert system: Framework and application. Saf. Sci. 2015, 77, 182–204. [Google Scholar] [CrossRef]
- van Westrenen, F.; Ellerbroek, J. The effect of traffic complexity on the development of near misses on the North Sea. IEEE Trans. Syst. Manand Cybern. Syst. 2015, 47, 432–440. [Google Scholar] [CrossRef]
- Tam, C.; Bucknall, R. Collision risk assessment for ships. J. Mar. Sci. Technol. 2010, 15, 257–270. [Google Scholar] [CrossRef]
- Juszkiewicz, W. Verification of the accuracy requirements for relative course and closest point of approach. Zesz. Nauk. Akad. Morska Szczec. 2016, 45, 108–113. [Google Scholar]
- Asmi, E.; Kivekäs, N.; Kerminen, V.M.; Komppula, M.; Hyvärinen, A.P.; Hatakka, J.; Viisanen, Y.; Lihavainen, H. Secondary new particle formation in Northern Finland Pallas site between the years 2000 and 2010. Atmos. Chem. Phys. Discuss. 2011, 11, 12959–12972. [Google Scholar] [CrossRef]
- Huang, Y.; van Gelder, P.H.A.J.M. Non-linear velocity obstacles with applications to the maritime domain. In Proceedings of the 7th International Congress on Maritime Transportation and Harvesting of Sea Resources, Lisbon, Portugal, 9–11 October 2017. [Google Scholar]
- IMO. Adoption of the Revised Performance Standards for Integrated Navigation Systems (INS); Resolution MSC 83/23/Add.3-ANNEX 30; IMO: London, UK, 2007. [Google Scholar]
- Douglas, D.H.; Peucker, T.K. Algorithms for the reduction of the number of points required to represent a digitized line or its caricature. Cartogr. Int. J. Geogr. Inf. Geovis. 1973, 10, 112–122. [Google Scholar] [CrossRef]
- d’Engelbronner, J.G.; Borst, C.; Ellerbroek, J.; Van Paassen, M.M.; Mulder, M. Solution-space–based analysis of dynamic air traffic controller workload. J. Aircr. 2015, 52, 1146–1160. [Google Scholar] [CrossRef]
- HELCOM. HELCOM Recommendation 33/1—Unified Interpretation in Relation to Access to and Use of HELCOM AIS; Helsinki Commission, Baltic Marine Environment Protection Commission: Helsinki, Finland, 2012. [Google Scholar]
- Zhou, Y.; Daamen, W.; Vellinga, T.; Hoogendoorn, S.P. Ship classification based on ship behavior clustering from AIS data. Ocean Eng. 2019, 175, 176–187. [Google Scholar] [CrossRef]
- COWI. BRISK—Sub-Regional Risk of Spill of Oil and Haardous Substances in the Baltic Sea; COWI: Copenhagen, Denmark, 2012. [Google Scholar]
- Kim, D.H. Human factors influencing the ship operator’s perceived risk in the last moment of collision encounter. Reliab. Eng. Syst. Saf. 2020, 203, 107078. [Google Scholar] [CrossRef]
- Brcko, T. Determining the most immediate danger during a multi-vessel encounter. In Proceedings of the 18th International Conference on Transport Science (ICTS 2018), Portrož, Slovenia, 14–15 June 2018; pp. 57–64. [Google Scholar]
- Tao, J.; Du, L.; Dehmer, M.; Wen, Y.; Xie, G.; Zhou, Q. Path following control for towing system of cylindrical drilling platform in presence of disturbances and uncertainties. ISA Trans. 2019, 95, 185–193. [Google Scholar] [CrossRef] [PubMed]
- Taimuri, G.; Matusiak, J.; Mikkola, T.; Kujala, P.; Hirdaris, S. A 6-DoF maneuvering model for the rapid estimation of hydrodynamic actions in deep and shallow waters. Ocean Eng. 2020, 218, 108103. [Google Scholar] [CrossRef]
- Valdez Banda, O.A.; Goerlandt, F. A STAMP-based approach for designing maritime safety management systems. Saf. Sci. 2018, 109, 109–129. [Google Scholar] [CrossRef]
- Valdez Banda, O.A.; Kannos, S.; Goerlandt, F.; van Gelder, P.H.; Bergström, M.; Kujala, P. A systemic hazard analysis and management process for the concept design phase of an autonomous vessel. Reliab. Eng. Syst. Saf. 2019, 191, 106584. [Google Scholar] [CrossRef]
- Chaal, M.; Banda OA, V.; Glomsrud, J.A.; Basnet, S.; Hirdaris, S.; Kujala, P. 2020. A framework to model the STPA hierarchical control structure of an autonomous ship. Saf. Sci. 2020, 132, 104939. [Google Scholar] [CrossRef]
- Pietrzykowski, Z.; Uriasz, J. The ship domain–a criterion of navigational safety assessment in an open sea area. J. Navig. 2009, 62, 93–108. [Google Scholar] [CrossRef]
- Wang, Y.; Chin, H.C. An empirically-calibrated ship domain as a safety criterion for navigation in confined waters. J. Navig. 2016, 69, 257–276. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Near Miss Severity | Criteria | |
|---|---|---|
| GW | SO | |
| No risk | IC = 0 | (1) IC = 0 |
| Low risk | IC = 1; LAMM = H | (1) IC = 1; Int = 1; AQ = 1; Col = 1 (2) IC = 1; Int = 1; AQ = −1; LAMM =H; Col = 1 |
| Medium risk | IC = 1; LAMM = M | (1) IC = 1; Int = 1; AQ = 1; Col = 0 (2) IC = 1; Int = 1; AQ = −1; LAMM =M; Col = 1 (3) IC = 1; Int = 0; AQ = −1; LAMM =H; Col = 0 (4) IC = 1; Int = 0; AQ = −1; LAMM =M; Col = 0 |
| High risk | IC = 1; LAMM = L | (1) IC = 1; Int = 1; AQ = −1; LAMM =L; Col = 0 (2) IC = 1; Int = 0; AQ = −1; LAMM =L; Col = 0 |
| Ship Type | COLREGs Identity | |||
|---|---|---|---|---|
| Small Size | Medium Size | Large Size | ||
| Passenger Ship | GW | 0.986/0.586 | 0.914/0.486 | 0.814/0.343 |
| SO | 0.943/0.443 | 0.786/0.314 | 0.729/0.229 | |
| Tanker | GW | 0.871/0.471 | 0.829/0.314 | 0.8/0.229 |
| SO | 0.857/0.371 | 0.629/0.214 | 0.486/0.186 | |
| Cargo Ship | GW | 0.9/0.4 | 0.886/0.343 | 0.871/0.257 |
| SO | 0.729/0.314 | 0.5/0.243 | 0.486/0.157 | |
| Ship Size | Passenger Ships | Tankers | Cargo Ships | |||
|---|---|---|---|---|---|---|
| GW | SO | GW | SO | GW | SO | |
| Small | 1201 | 1145 | 91 | 93 | 493 | 560 |
| Medium | 801 | 689 | 533 | 526 | 1168 | 1049 |
| Large | 472 | 396 | 99 | 70 | 100 | 77 |
| Ship Attributes | COLREGs Identity | MMSI | Type | Length (m) | Width (m) | Initial State | ||
|---|---|---|---|---|---|---|---|---|
| Position | Course | Speed(kn) | ||||||
| Scenario 1 | / | 21047XXXX | Cargo Ship | 87 | 13 | 59.5548°N 23.7341°E | 101.7° | 9.2 |
| / | 30432XXXX | Cargo Ship | 88 | 13 | 59.5094°N 23.7724°E | 61.1° | 9.2667 | |
| Scenario 2 | GW | 20941XXXX | Cargo Ship | 108 | 15 | 59.5757°N 20.1588°E | 312.7° | 8.5667 |
| SO | 21023XXXX | Cargo Ship | 90 | 13 | 59.6044°N 20.224°E | 274.8° | 10.8 | |
| Scenario 3 | GW | 21024XXXX | Cargo Ship | 146 | 20 | 63.3732°N 20.5109°E | 29° | 14.7 |
| SO | 24613XXXX | Cargo Ship | 100 | 13 | 63.3931°N 20.552°E | 28° | 10.84 | |
| Scenario 4 | GW | 21043XXXX | Cargo Ship | 120 | 16 | 59.9142°N 19.4137°E | 138.7° | 11.383 |
| SO | 26500XXXX | Passenger Ship | 203 | 32 | 59.7527°N 19.296°E | 71.3° | 19.4 | |
| Encounter Scenarios | |||||
|---|---|---|---|---|---|
| Scenario 1 | / | / | / | / | / |
| Scenario 2 | 17 min | 122.8° | 326.4° | 336.2° | 33.6° |
| Scenario 3 | 17 min | 43.63° | 358.14° | 225.23° | 1.6° |
| Scenario 4 | 14 min | 76.15° | 268.1° | 348.04° | 91.9° |
| COLREGs Identity | MMSI | Type | Length | Width | Initial State | ||
|---|---|---|---|---|---|---|---|
| (m) | (m) | Position | Course | Speed(kn) | |||
| GW | 23099XXXX | Passenger Ship | 48 | 10 | 60.1579°N 21.3986°E | 49.2° | 12.2 |
| SO | 23015XXXX | Passenger Ship | 171 | 28 | 60.2103°N 21.5856°E | 251° | 16.3 |
| Intruder | 26512XXXX | Passenger Ship | 155 | 22 | 60.2154°N 21.6411°E | 260.7° | 17.3 |
| Ship Type | Ship Size | Occurrence Ratio | |||
|---|---|---|---|---|---|
| Ship Pair Encounter | Multi-Vessel Encounter Without Rule Conflict | Multi-Vessel Encounter with Rule Conflict | Total | ||
| Passenger ship | Small | 0.66% | 1.54% | 3.35% | 5.55% |
| Medium | 1.32% | 1.61% | 3.21% | 6.14% | |
| Large | 1.21% | 1.57% | 3.39% | 6.17% | |
| Tanker | Small | 1.64% | 1.4% | 3.02% | 6.06% |
| Medium | 0.94% | 1.74% | 3.24% | 5.92% | |
| Large | 1.51% | 1.04% | 2.88% | 5.43% | |
| Cargo ship | Small | 1.12% | 1.19% | 2.25% | 4.56% |
| Medium | 1.12% | 1.18% | 2.42% | 4.72% | |
| Large | 1.25% | 0.67% | 2.24% | 4.16% | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Du, L.; Valdez Banda, O.A.; Goerlandt, F.; Kujala, P.; Zhang, W. Improving Near Miss Detection in Maritime Traffic in the Northern Baltic Sea from AIS Data. J. Mar. Sci. Eng. 2021, 9, 180. https://doi.org/10.3390/jmse9020180
Du L, Valdez Banda OA, Goerlandt F, Kujala P, Zhang W. Improving Near Miss Detection in Maritime Traffic in the Northern Baltic Sea from AIS Data. Journal of Marine Science and Engineering. 2021; 9(2):180. https://doi.org/10.3390/jmse9020180
Chicago/Turabian StyleDu, Lei, Osiris A. Valdez Banda, Floris Goerlandt, Pentti Kujala, and Weibin Zhang. 2021. "Improving Near Miss Detection in Maritime Traffic in the Northern Baltic Sea from AIS Data" Journal of Marine Science and Engineering 9, no. 2: 180. https://doi.org/10.3390/jmse9020180
APA StyleDu, L., Valdez Banda, O. A., Goerlandt, F., Kujala, P., & Zhang, W. (2021). Improving Near Miss Detection in Maritime Traffic in the Northern Baltic Sea from AIS Data. Journal of Marine Science and Engineering, 9(2), 180. https://doi.org/10.3390/jmse9020180