
Oil Spill Modeling: A Critical Review on Current Trends, Perspectives, and Challenges

 ,
,  , and
, and 
Abstract
1. Introduction
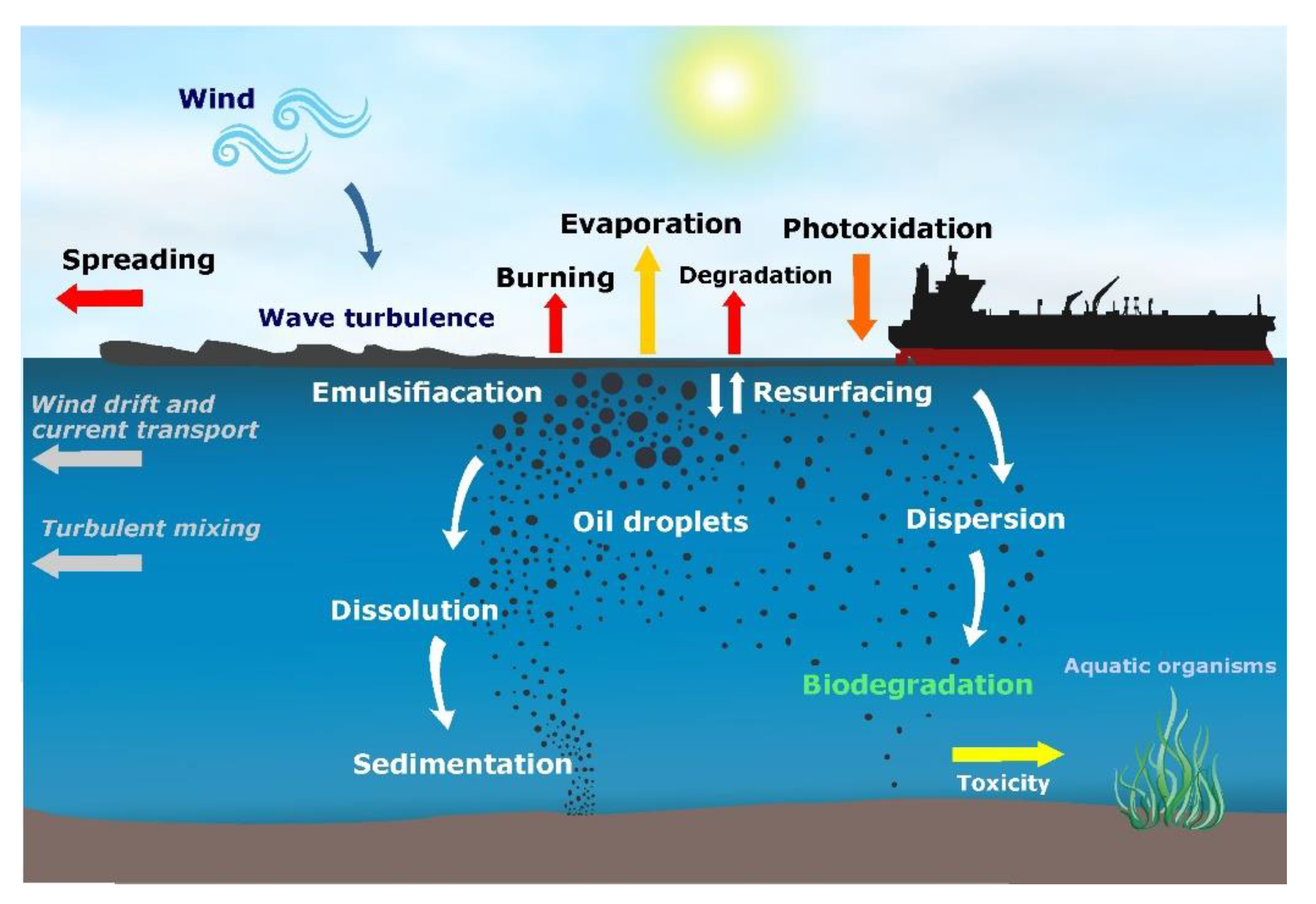
2. Oil Physical Transport and Weathering Processes
2.1. Oil Weathering Processes
2.1.1. Spreading
2.1.2. Evaporation
2.1.3. Emulsification
2.1.4. Dissolution
2.1.5. Photo-Oxidation
2.1.6. Biodegradation
2.1.7. Sedimentation
2.2. Physical Transport Processes
2.2.1. Dispersion
2.2.2. Resurfacing of Submerged Oil
2.2.3. Turbulent Mixing
2.2.4. Transport
3. Oil Spill Models—The State-of-Art
3.1. Surface Oil Spill Models and Blowout/Buoyant Plume Models
3.2. The New Generation of Oil Spill Models
4. A Comparative Assessment of State-of-the-Art Oil Spill Models
4.1. Operational Response Models
4.2. Deep Sea Blowout/Buoyant Plume Models
4.3. Spill Response Planning and Environmental Impact Assessment
4.4. Models Performance against Field Data
5. Conclusions and Recommendations
- the integration of blowout and droplet size distribution model, since the majority of operational oil spill modes are surface. The merging of blowout/ buoyant plume model with the surface oil spill model is essential, considering an oil droplet size distribution algorithm and integrating it in operational models;
- the improvement in the parameterization of oil transport, since the accuracy of the transport process depends on the accuracy of the circulation and atmospheric models. Furthermore, a droplet size distribution algorithm should be taken into account for transport processes in the future operational response models;
- the improvement in the parameterization of entrainment, since evaporation and entrainment are highly complex processes, and generally inconsistently handled in spill models. Entrainment is a function of white capping/wave breaking, which is an intermittent process. Droplets are formed, then are entrained, they rise at various rates to the surface. This is not well handled by assuming wave-averaged Eulerian velocities or average dissipation rates. In addition, treating the oil as a film for the evaporation and as droplets for other processes is inconsistent. For this reason, future operational model should include the wave spectrum, the white capping and entrainment of oil, depending on oil droplet distribution;
- the parametrization of photo-oxidation and integration in operational oil spill models, since the existing operational models do not include photo-oxidation, as there is limited knowledge about the process and parametric expressions are missing. The importance of this process has not yet been properly understood, thus an algorithm should be developed;
- the parametrization of MOSSFA process and its integration in the operational oil spill models, since the current operational models do not include the MOSSFA process, which has significant role in risk and hazard assessment, in biological impact analysis and in response planning modeling.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- ITOPF. Oil Tanker Spill Statistics 2011; The International Tanker Owners Pollution Federation Limited: London, UK, 2011. [Google Scholar]
- ITOPF. Statistics—ITOPF. Available online: https://www.itopf.org/knowledge-resources/data-statistics/statistics/ (accessed on 1 January 2018).
- ITOPF. Oil Tanker Spill Statistics 2020. Available online: https://www.itopf.org/knowledge-resources/data-statistics/statistics/ (accessed on 5 February 2021).
- Walker, A.H.; Pavia, R.; Bostrom, A.; Leschine, T.M.; Starbird, K. Communication practices for oil spills: Stakeholder engagement during preparedness and response. Hum. Ecol. Risk Assess. Int. J. 2015, 21, 667–690. [Google Scholar] [CrossRef]
- Fingas, M.; Fieldhouse, B. Water-in-oil emulsions: Formation and prediction. In Handbook of Oil Spill Science Technology; John Wiley & Sons: Hoboken, NJ, USA, 2014; p. 225. [Google Scholar]
- Azevedo, A.; Oliveira, A.; Fortunato, A.B.; Zhang, J.; Baptista, A.M. A cross-scale numerical modeling system for management support of oil spill accidents. Mar. Pollut. Bull. 2014, 80, 132–147. [Google Scholar] [CrossRef] [PubMed]
- Mishra, A.K.; Kumar, G.S. Weathering of oil spill: Modeling and analysis. Aquat. Procedia 2015, 4, 435–442. [Google Scholar] [CrossRef]
- Chen, H.; An, W.; You, Y.; Lei, F.; Zhao, Y.; Li, J. Numerical study of underwater fate of oil spilled from deepwater blowout. Ocean Eng. 2015, 110, 227–243. [Google Scholar] [CrossRef]
- Hardeo, A.; Chakrabarti, D.P. Vector-Based Oil Spill Model. Chem. Eng. Commun. 2016, 203, 1656–1665. [Google Scholar] [CrossRef]
- Zafirakou, A. Oil Spill Dispersion Forecasting Models. In Monitoring of Marine Pollution; IntechOpen: London, UK, 2018. [Google Scholar]
- Spaulding, M.L. A state-of-the-art review of oil spill trajectory and fate modeling. Oil Chem. Pollut. 1988, 4, 39–55. [Google Scholar] [CrossRef]
- Spaulding, M.L. State of the art review and future directions in oil spill modeling. Mar. Pollut. Bull. 2017, 115, 7–19. [Google Scholar] [CrossRef] [PubMed]
- ASCE. State-of-the-art review of modeling transport and fate of oil spills. J. Hydraul. Eng. 1996, 122, 594–609. [Google Scholar] [CrossRef]
- Reed, M.; Johansen, Ø.; Brandvik, P.J.; Daling, P.; Lewis, A.; Fiocco, R.; Mackay, D.; Prentki, R. Oil spill modeling towards the close of the 20th century: Overview of the state of the art. Spill Sci. Technol. Bull. 1999, 5, 3–16. [Google Scholar] [CrossRef]
- Barker, C.H.; Kourafalou, V.H.; Beegle-Krause, C.J.; Boufadel, M.; Bourassa, M.A.; Buschang, S.G.; Androulidakis, Y.; Chassignet, E.P.; Dagestad, K.-F.; Danmeier, D.G. Progress in Operational Modeling in Support of Oil Spill Response. J. Mar. Sci. Eng. 2020, 8, 668. [Google Scholar] [CrossRef]
- Simecek-Beatty, D.; Lehr, W.J. Extended oil spill spreading with Langmuir circulation. Mar. Pollut. Bull. 2017, 122, 226–235. [Google Scholar] [CrossRef]
- Gług, M.; Wąs, J. Modeling of oil spill spreading disasters using combination of Langrangian discrete particle algorithm with Cellular Automata approach. Ocean Eng. 2018, 156, 396–405. [Google Scholar] [CrossRef]
- Buist, I.; Twardus, E. In-situ burning of uncontained oil slicks. In Proceedings of the 7th Arctic and Marine Oil Spill Program (AMOP) Technical Seminar, Edmonton, AB, Canada, 12–14 June 1984; Environment Canada: Ottawa, ON, Canada, 1984; pp. 127–154. [Google Scholar]
- Fay, J. The Spread of Oil Slicks on a Calm Sea. In Oil on the Sea; Hoult, D.P., Ed.; Springer: Boston, MA, USA, 1969; pp. 53–63. [Google Scholar] [CrossRef]
- Fay, J.A. Physical processes in the spread of oil on a water surface. In Proceedings of the International Oil Spill Conference, Washington, DC, USA, 15–17 June 1971; pp. 463–467. [Google Scholar]
- Hoult, D.P. Oil spreading on the sea. Annu. Rev. Fluid Mech. 1972, 4, 341–368. [Google Scholar] [CrossRef]
- Mackay, D.; Buist, I.A.; Mascarenhas, R.; Paterson, S. Oil Spill Processes and Models: Environment Canada Manuscript Report No 8; Environment Canada: Ottawa, ON, Canada, 1980.
- Mackay, D.; Paterson, S.; Trudel, K. A Mathematical Model of Oil Spill Behaviour. Report to Research and Development Division, Environment Emergency Branch, Environmental Impact Control Directorate; Environment Canada: Ottawa, ON, Canada, 1980.
- Mackay, D.; Shiu, W.Y.; Hossain, K.; Stiver, W.; McCurdy, D. Development and Calibration of an Oil Spill Behavior Model; Toronto University (ONTARIO) Department of Chemical Engineering and Applied Chemistry: Toronto, ON, Canada, 1982. [Google Scholar]
- Lehr, W.; Jones, R.; Evans, M.; Simecek-Beatty, D.; Overstreet, R. Revisions of the ADIOS oil spill model. Environ. Model. Softw. 2002, 17, 189–197. [Google Scholar] [CrossRef]
- Geng, X.; Boufadel, M.C.; Ozgokmen, T.; King, T.; Lee, K.; Lu, Y.; Zhao, L. Oil droplets transport due to irregular waves: Development of large-scale spreading coefficients. Mar. Pollut. Bull. 2016, 104, 279–289. [Google Scholar] [CrossRef]
- Elliott, A.J. Shear diffusion and the spread of oil in the surface layers of the North Sea. Dtsch. Hydrogr. Z. 1986, 39, 113–137. [Google Scholar] [CrossRef]
- Galt, J.; Overstreet, R. Development of Spreading Algorithms for the ROC; Genwest Systems Inc.: Edmonds, WA, USA, 2009; p. 68. [Google Scholar]
- Korinenko, A.E.; Malinovsky, V.V. Field study of film spreading on a sea surface. Oceanologia 2014, 56, 461–475. [Google Scholar] [CrossRef]
- Horn, M. Trajectory and Fate Modelling in Support of the ExxonMobil Eastern Newfoundland Offshore Exploration Drilling Project; RPS: South Kingstown, RI, USA, 2018. [Google Scholar]
- Ocean Studies Board; National Academies of Sciences, Engineering, and Medicine. The Use of Dispersants in Marine Oil Spill Response; National Academies Press: Washington, DC, USA, 2020. [Google Scholar]
- Stiver, W.; Mackay, D. Evaporation rate of spills of hydrocarbons and petroleum mixtures. Environ. Sci. Technol. 1984, 18, 834–840. [Google Scholar] [CrossRef]
- Lehr, W.J.; Overstreet, R.; Jones, R.; Watabayashi, G. ADIOS-Automated Data Inquiry for Oil Spills; Environment Canada: Ottawa, ON, Canada, 1992.
- Overstreet, R.; Lewandowski, A.; Lehr, W.; Jones, R.; Simecek-Beatty, D.; Calhoun, D. Sensitivity analysis in oil spill models: Case study using ADIOS. In Proceedings of the International Oil Spill Conference, Long Beach, CA, USA, 27 February–2 March 1995; pp. 898–900. [Google Scholar]
- Jones, R. A simplified pseudo-component oil evaporation model. In Proceedings of the Arctic and Marine Oilspill Program Technical Seminar, Vancouver, BC, Canada, 11–13 June 1997; pp. 43–62. [Google Scholar]
- Payne, J.; Kirstein, B.; McNabb, G., Jr.; Lambach, J.; Redding, R.; Jordan, R.; Hom, W.; De Oliveira, C.; Smith, G.; Baxter, D. Multivariate analysis of petroleum weathering in the marine environment–sub Arctic. Environ. Assess. Alsk. Cont. Shelf Final Rep. Princ. Investig. 1984, 21, 423–434. [Google Scholar]
- Reed, M.; Daling, P.S.; Brakstad, O.G.; Singsaas, I.; Faksness, L.-G.; Hetland, B.; Ekrol, N. OSCAR2000: A multi-component 3-dimensional oil spill contingency and response model. In Proceedings of the Arctic and Marine Oilspill Program Technical Seminar, Vancouver, BC, Canada, 14–16 June 2000; pp. 663–680. [Google Scholar]
- French-McCay, D. Development and application of damage assessment modeling: Example assessment for the North Cape oil spill. Mar. Pollut. Bull. 2003, 47, 341–359. [Google Scholar] [CrossRef]
- French-McCay, D.; Rowe, J.J. Evaluation of bird impacts in historical oil spill cases using the SIMAP oil spill model. In Proceedings of the Arctic and Marine Oilspill Program Technical Seminar, Edmonton, AB, Canada, 8–10 June 2004; pp. 421–452. [Google Scholar]
- Fingas, M.F. Modeling evaporation using models that are not boundary-layer regulated. J. Hazard. Mater. 2004, 107, 27–36. [Google Scholar] [CrossRef]
- Fingas, M.F. Studies on the evaporation regulation mechanisms of crude oil and petroleum products. Adv. Chem. Eng. Sci. 2012, 2, 246–256. [Google Scholar] [CrossRef]
- Fingas, M.F. Oil and petroleum evaporation. In Handbook of Oil Spill Science Technology; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2015; Volume 2, pp. 205–223. [Google Scholar]
- Fingas, M.; Fieldhouse, B.; Mullin, J. Studies of water-in-oil emulsions and techniques to measure emulsion treating agents. In Proceedings of the Arctic and Marine Oilspill Program Technical Seminar, Vancouver, BC, Canada, 8–10 June 1994; p. 213. [Google Scholar]
- Fingas, M. Water-in-oil emulsion formation: A review of physics and mathematical modelling. Spill Sci. Technol. Bull. 1995, 2, 55–59. [Google Scholar] [CrossRef]
- Fingas, M.; Fieldhouse, B.; Lane, J.; Mullin, J. Studies of water-in-oil emulsions: Long-term stability, oil properties, and emulsions formed at sea. In Proceedings of the Arctic and Marine Oilspill Program Technical Seminar, Vancouver, BC, Canada, 14–16 June 2000; pp. 145–160. [Google Scholar]
- Payne, J.R. Petroleum Spills in the Marine Environment: The Chemistry and Formation of Water-in-Oil Emulsions and Tar Balls; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Daling, P.S.; Moldestad, M.Ø.; Johansen, Ø.; Lewis, A.; Rødal, J. Norwegian testing of emulsion properties at sea—The importance of oil type and release conditions. Spill Sci. Technol. Bull. 2003, 8, 123–136. [Google Scholar] [CrossRef]
- Ashrafizadeh, S.; Motaee, E.; Hoshyargar, V. Emulsification of heavy crude oil in water by natural surfactants. J. Pet. Sci. Eng. 2012, 86, 137–143. [Google Scholar] [CrossRef]
- Komaiko, J.; Sastrosubroto, A.; McClements, D.J. Formation of oil-in-water emulsions from natural emulsifiers using spontaneous emulsification: Sunflower phospholipids. J. Agric. Food Chem. 2015, 63, 10078–10088. [Google Scholar] [CrossRef] [PubMed]
- MacKay, D.; Zagorski, W. Studies of Water-in-Oil Emulsions; Environment Canada: Ottawa, ON, Canada, 1982. [Google Scholar]
- Council, N.R. Oil in the Sea, Inputs, Fates, and Effects; The National Academies Press: Washington, DC, USA, 1985. [Google Scholar] [CrossRef]
- Fingas, M. The evaporation of oil spills: Prediction of equations using distillation data. Spill Sci. Technol. Bull. 1996, 3, 191–192. [Google Scholar] [CrossRef]
- Fingas, M.F. The evaporation of oil spills: Development and implementation of new prediction methodology. In Proceedings of the International Oil Spill Conference, Calgary, AB, Canada, 2–4 June 1999; pp. 281–287. [Google Scholar]
- Fingas, M.F. Oil Spill Science and Technology: Prevention, 1st ed.; Gulf Professional Publishing: Amsterdam, The Netherlands, 2011; p. 1192. [Google Scholar]
- Fingas, M. Models for water-in-oil emulsion formation. In Oil Spill Science and Technology; Elsevier: Amsterdam, The Netherlands, 2011; pp. 243–273. [Google Scholar]
- Fingas, M.; Fieldhouse, B. Studies on crude oil and petroleum product emulsions: Water resolution and rheology. Colloids Surf. A Physicochem. Eng. Asp. 2009, 333, 67–81. [Google Scholar] [CrossRef]
- Daling, P.S.; StrØm, T. Weathering of oils at sea: Model/field data comparisons. Spill Sci. Technol. Bull. 1999, 5, 63–74. [Google Scholar] [CrossRef]
- ITOPF. Fate of Marine Oil Spills. Available online: https://www.itopf.org/knowledge-resources/documents-guides/fate-of-oil-spills/ (accessed on 17 April 2014).
- Abianeh, O.S.; Chen, C. Modelling of evaporation and dissolution of multicomponent oil droplet in shallow water. Adv. Comput. Methods Exp. Heat Transf. 2012, 12, 231. [Google Scholar]
- Mackay, D. Mathematical Model of the Behavior of Oil Spills on Water with Natural and Chemical Dispersion; Environment Canada: Ottawa, ON, Canada, 1977.
- Ward, C.P.; Overton, E.B. How the 2010 Deepwater Horizon spill reshaped our understanding of crude oil photochemical weathering at sea: A past, present, and future perspective. Environ. Sci. Process. Impacts 2020, 22, 1125–1138. [Google Scholar] [CrossRef]
- Ward, C.P.; Sharpless, C.M.; Valentine, D.L.; French-McCay, D.P.; Aeppli, C.; White, H.K.; Rodgers, R.P.; Gosselin, K.M.; Nelson, R.K.; Reddy, C.M. Partial photochemical oxidation was a dominant fate of Deepwater Horizon surface oil. Environ. Sci. Technol. 2018, 52, 1797–1805. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Fingas, M.F. Development of oil hydrocarbon fingerprinting and identification techniques. Mar. Pollut. Bull. 2003, 47, 423–452. [Google Scholar] [CrossRef]
- Shankar, R.; Shim, W.J.; An, J.G.; Yim, U.H. A practical review on photooxidation of crude oil: Laboratory lamp setup and factors affecting it. Water Res. 2015, 68, 304–315. [Google Scholar] [CrossRef] [PubMed]
- Kolpack, R.; Plutchak, N.; Stearns, R. Fate of Oil in Water Environment±Phase II, a Dynamic Model of the Mass Balance for Released Oil; University of Southern California: Washington, DC, USA, 1977. [Google Scholar]
- Das, N.; Chandran, P. Microbial degradation of petroleum hydrocarbon contaminants: An overview. Biotechnol. Res. Int. 2011, 2011, 941810. [Google Scholar] [CrossRef]
- McGenity, T.J.; Folwell, B.D.; McKew, B.A.; Sanni, G.O. Marine crude-oil biodegradation: A central role for interspecies interactions. Aquat. Biosyst. 2012, 8, 10. [Google Scholar] [CrossRef] [PubMed]
- Xue, J.; Yu, Y.; Bai, Y.; Wang, L.; Wu, Y. Marine oil-degrading microorganisms and biodegradation process of petroleum hydrocarbon in marine environments: A review. Curr. Microbiol. 2015, 71, 220–228. [Google Scholar] [CrossRef]
- Li, Z.; McCay, D.F. Review of Hydrocarbon Biodegradation Rates for Use in Modeling Oil Fate in Seawater; RPS ASA Group: Wakefield, RI, USA, 2016. [Google Scholar]
- Ławniczak, Ł.; Woźniak-Karczewska, M.; Loibner, A.P.; Heipieper, H.J.; Chrzanowski, Ł. Microbial degradation of hydrocarbons—Basic principles for bioremediation: A review. Molecules 2020, 25, 856. [Google Scholar] [CrossRef]
- Kostka, J.E.; Joye, S.B.; Overholt, W.; Bubenheim, P.; Hackbusch, S.; Larter, S.R.; Liese, A.; Lincoln, S.A.; Marietou, A.; Müller, R. Biodegradation of petroleum hydrocarbons in the deep sea. In Deep Oil Spills; Springer: Cham, Switzerland, 2020; pp. 107–124. [Google Scholar]
- Socolofsky, S.A.; Gros, J.; North, E.; Boufadel, M.C.; Parkerton, T.F.; Adams, E.E. The treatment of biodegradation in models of sub-surface oil spills: A review and sensitivity study. Mar. Pollut. Bull. 2019, 143, 204–219. [Google Scholar] [CrossRef] [PubMed]
- Thrift-Viveros, D.L.; Jones, R.; Boufadel, M. Development of a new oil biodegradation algorithm for NOAA’s oil spill modeling suite (GNOME/ADIOS). In Proceedings of the 38th AMOP Technical Seminar, Vancouver, BC, Canada, 2–4 June 2015; Environment Canada: Ottawa, ON, Canada, 2015; pp. 143–152. [Google Scholar]
- Kleindienst, S.; Paul, J.H.; Joye, S.B. Using dispersants after oil spills: Impacts on the composition and activity of microbial communities. Nat. Rev. Microbiol. 2015, 13, 388–396. [Google Scholar] [CrossRef]
- Rahsepar, S.; Smit, M.P.J.; Murk, A.J.; Rijnaarts, H.H.M.; Langenhoff, A.A.M. Chemical dispersants: Oil biodegradation friend or foe? Mar. Pollut. Bull. 2016, 108, 113–119. [Google Scholar] [CrossRef]
- Vilcáez, J.; Li, L.; Hubbard, S.S. A new model for the biodegradation kinetics of oil droplets: Application to the Deepwater Horizon oil spill in the Gulf of Mexico. Geochem. Trans. 2013, 14, 4. [Google Scholar] [CrossRef] [PubMed]
- Yassine, M.H.; Wu, S.; Suidan, M.T.; Venosa, A.D. Aerobic biodegradation kinetics and mineralization of six petrodiesel/soybean-biodiesel blends. Environ. Sci. Technol. 2013, 47, 4619–4627. [Google Scholar] [CrossRef]
- Olson, G.M.; Gao, H.; Meyer, B.M.; Miles, M.S.; Overton, E.B. Effect of Corexit 9500A on Mississippi Canyon crude oil weathering patterns using artificial and natural seawater. Heliyon 2017, 3, e00269. [Google Scholar] [CrossRef] [PubMed]
- McFarlin, K.M.; Prince, R.C.; Perkins, R.; Leigh, M.B. Biodegradation of Dispersed Oil in Arctic Seawater at −1 °C. PLoS ONE 2014, 9, e84297. [Google Scholar] [CrossRef]
- Denis, B.; Pérez, O.A.; Lizardi-Jiménez, M.A.; Dutta, A. Numerical evaluation of direct interfacial uptake by a microbial consortium in an airlift bioreactor. Int. Biodeterior. Biodegrad. 2017, 119, 542–551. [Google Scholar] [CrossRef]
- García-Cruz, N.U.; Valdivia-Rivera, S.; Narciso-Ortiz, L.; García-Maldonado, J.Q.; Uribe-Flores, M.M.; Aguirre-Macedo, M.L.; Lizardi-Jiménez, M.A. Diesel uptake by an indigenous microbial consortium isolated from sediments of the Southern Gulf of Mexico: Emulsion characterisation. Environ. Pollut. 2019, 250, 849–855. [Google Scholar] [CrossRef]
- Brakstad, O.G.; Nordtug, T.; Throne-Holst, M. Biodegradation of dispersed Macondo oil in seawater at low temperature and different oil droplet sizes. Mar. Pollut. Bull. 2015, 93, 144–152. [Google Scholar] [CrossRef] [PubMed]
- Brakstad, O.G.; Almås, I.K.; Krause, D.F. Biotransformation of natural gas and oil compounds associated with marine oil discharges. Chemosphere 2017, 182, 555–558. [Google Scholar] [CrossRef]
- Brakstad, O.G.; Daling, P.S.; Faksness, L.G.; Almås, I.K.; Vang, S.H.; Syslak, L.; Leirvik, F. Depletion and biodegradation of hydrocarbons in dispersions and emulsions of the Macondo 252 oil generated in an oil-on-seawater mesocosm flume basin. Mar. Pollut. Bull. 2014, 84, 125–134. [Google Scholar] [CrossRef]
- Kapellos, G.E. Chapter 2—Microbial Strategies for Oil Biodegradation. In Modeling of Microscale Transport in Biological Processes; Becker, S.M., Ed.; Academic Press: Cambridge, MA, USA, 2017; pp. 19–39. [Google Scholar] [CrossRef]
- Kapellos, G.E.; Paraskeva, C.A.; Kalogerakis, N.; Doyle, P.S. Theoretical Insight into the Biodegradation of Solitary Oil Microdroplets Moving through a Water Column. Bioengineering 2018, 5, 15. [Google Scholar] [CrossRef] [PubMed]
- TAMOC—Texas A&M Oilspill Calculator. Available online: http://github.com/socolofs/tamoc (accessed on 10 October 2020).
- North, E.W.; Adams, E.E.; Thessen, A.E.; Schlag, Z.; He, R.; Socolofsky, S.A.; Masutani, S.M.; Peckham, S.D. The influence of droplet size and biodegradation on the transport of subsurface oil droplets during the Deepwater Horizon spill: A model sensitivity study. Environ. Res. Lett. 2015, 10, 024016. [Google Scholar] [CrossRef]
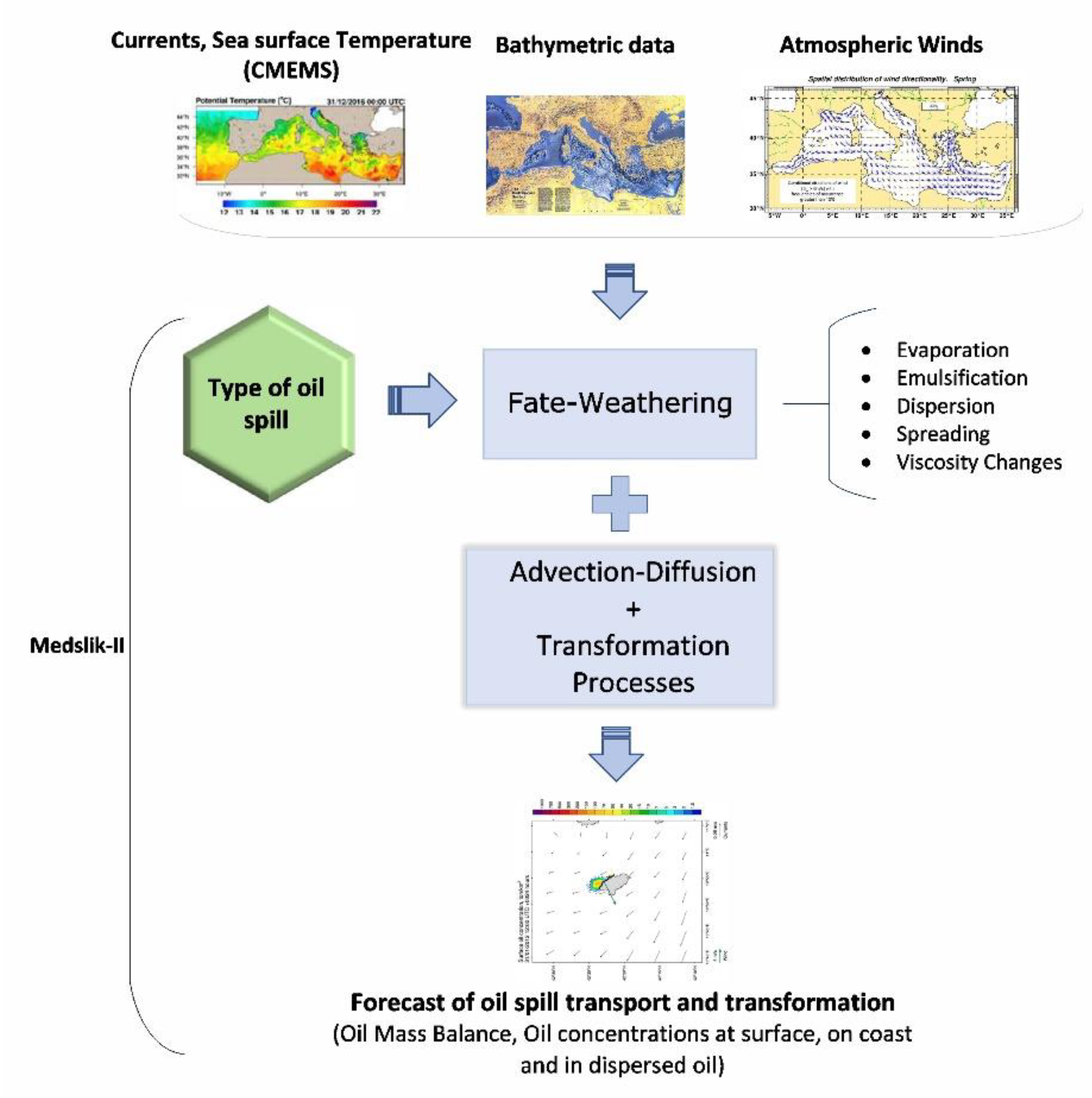
- De Dominicis, M.; Pinardi, N.; Zodiatis, G.; Lardner, R. MEDSLIK-II, a Lagrangian marine surface oil spill model for short-term forecasting—Part 1: Theory. Geosci. Model Dev. 2013, 6, 1851–1869. [Google Scholar] [CrossRef]
- De Dominicis, M.; Pinardi, N.; Zodiatis, G.; Archetti, R. MEDSLIK-II, a Lagrangian marine surface oil spill model for short-term forecasting-Part 2: Numerical simulations and validations. Geosci. Model Dev. 2013, 6, 1871–1888. [Google Scholar] [CrossRef]
- Spanoudaki, K.; Kampanis, N.; Kalogerakis, N.; Zodiatis, G.; Kozyrakis, G. Modelling of oil spills from deep sea releases. EGUGA 2018, 20, 16401. [Google Scholar]
- Zodiatis, G.; Lardner, R.; Spanoudaki, K.; Sofianos, S.; Radhakrishnan, H.; Coppini, G.; Liubartseva, S.; Kampanis, N.; Krokos, G.; Hoteit, I.; et al. Oil Spill Modelling Processes; Makarynskyy, O., Ed.; Elsevier: Amsterdam, The Netherlands, 2021. [Google Scholar]
- Levenspiel, O. Chemical reaction engineering. Ind. Eng. Chem. Res. 1999, 38, 4140–4143. [Google Scholar] [CrossRef]
- Li, H.; Bao, M.; Li, Y.; Zhao, L.; King, T.; Xie, Y. Effects of suspended particulate matter, surface oil layer thickness and surfactants on the formation and transport of oil-sediment aggregates (OSA). Int. Biodeterior. Biodegrad. 2020, 149, 104925. [Google Scholar] [CrossRef]
- Sun, J.; Zheng, X. A review of oil-suspended particulate matter aggregation—a natural process of cleansing spilled oil in the aquatic environment. J. Environ. Monit. 2009, 11, 1801–1809. [Google Scholar] [CrossRef]
- Gustitus, S.A.; Clement, T.P. Formation, fate, and impacts of microscopic and macroscopic oil-sediment residues in nearshore marine environments: A critical review. Rev. Geophys. 2017, 55, 1130–1157. [Google Scholar] [CrossRef]
- Payne, J.R.; Clayton, J.R.; Kirstein, B.E. Oil/Suspended Particulate Material Interactions and Sedimentation. Spill Sci. Technol. Bull. 2003, 8, 201–221. [Google Scholar] [CrossRef]
- Gong, Y.; Zhao, X.; Cai, Z.; O’Reilly, S.E.; Hao, X.; Zhao, D. A review of oil, dispersed oil and sediment interactions in the aquatic environment: Influence on the fate, transport and remediation of oil spills. Mar. Pollut. Bull. 2014, 79, 16–33. [Google Scholar] [CrossRef] [PubMed]
- Loh, A.; Shim, W.J.; Ha, S.Y.; Yim, U.H. Oil-suspended particulate matter aggregates: Formation mechanism and fate in the marine environment. Ocean Sci. J. 2014, 49, 329–341. [Google Scholar] [CrossRef]
- Gao, Y.; Zhao, X.; Ju, Z.; Yu, Y.; Qi, Z.; Xiong, D. Effects of the suspended sediment concentration and oil type on the formation of sunken and suspended oils in the Bohai Sea. Environ. Sci. Process. Impacts 2018, 20, 1404–1413. [Google Scholar] [CrossRef] [PubMed]
- Khelifa, A.; Ajijolaiya, L.; MacPherson, P.; Lee, K.; Hill, P.; Gharbi, S.; Blouin, M. Validation of OMA Formation in Cold Brackish and Sea Waters; Environment Canada: Ottawa, ON, Canada, 2005; Volume 1, pp. 527–538. [Google Scholar]
- Khelifa, A.; Stoffyn-Egli, P.; Hill, P.; Lee, K. Effects of salinity and clay type on oil-mineral aggregation. Mar. Environ. Res. 2005, 59, 235–254. [Google Scholar] [CrossRef]
- Khelifa, A.; Hill, P.S.; Lee, K. A comprehensive numerical approach to predict oil-mineral aggregate (oma) formation following oil spills in aquatic environments. Int. Oil Spill Conf. Proc. 2005, 2005, 873–877. [Google Scholar] [CrossRef]
- Zhao, L.; Boufadel, M.C.; Lee, K.; King, T.; Loney, N.; Geng, X. Evolution of bubble size distribution from gas blowout in shallow water. J. Geophys. Res. Ocean. 2016, 121, 1573–1599. [Google Scholar] [CrossRef]
- Zhao, L.; Boufadel, M.C.; Geng, X.; Lee, K.; King, T.; Robinson, B.H.; Fitzpatrick, F.A. A-DROP: A predictive model for the formation of oil particle aggregates (OPAs). Mar. Pollut. Bull. 2016, 106, 245–259. [Google Scholar] [CrossRef] [PubMed]
- Daly, K.L.; Passow, U.; Chanton, J.; Hollander, D. Assessing the impacts of oil-associated marine snow formation and sedimentation during and after the Deepwater Horizon oil spill. Anthropocene 2016, 13, 18–33. [Google Scholar] [CrossRef]
- Foekema, E.M.; van Eenennaam, J.S.; Hollander, D.J.; Langenhoff, A.M.; Oldenburg, T.B.P.; Radović, J.R.; Rohal, M.; Romero, I.C.; Schwing, P.T.; Murk, A.J. Testing the Effect of MOSSFA (Marine Oil Snow Sedimentation and Flocculent Accumulation) Events in Benthic Microcosms. In Scenarios and Responses to Future Deep Oil Spills; Springer: Cham, Switzerland, 2020; pp. 288–299. [Google Scholar]
- Daly, K.L.; Vaz, A.C.; Paris, C.B. Physical Processes Influencing the Sedimentation and Lateral Transport of MOSSFA in the NE Gulf of Mexico. In Scenarios and Responses to Future Deep Oil Spills; Springer: Cham, Switzerland, 2020; pp. 300–314. [Google Scholar]
- Quigg, A.; Passow, U.; Daly, K.L.; Burd, A.; Hollander, D.J.; Schwing, P.T.; Lee, K. marine oil snow sedimentation and flocculent accumulation (MOSSFA) events: Learning from the past to predict the future. In Deep Oil Spills; Springer: Cham, Switzerland, 2020; pp. 196–220. [Google Scholar]
- Delvigne, G.A.L.; Sweeney, C.E. Natural dispersion of oil. Oil Chem. Pollut. 1988, 4, 281–310. [Google Scholar] [CrossRef]
- Tkalich, P.; Chan, E.S. Vertical mixing of oil droplets by breaking waves. Mar. Pollut. Bull. 2002, 44, 1219–1229. [Google Scholar] [CrossRef]
- Röhrs, J.; Dagestad, K.F.; Asbjørnsen, H.; Nordam, T.; Skancke, J.; Jones, C.E.; Brekke, C. The effect of vertical mixing on the horizontal drift of oil spills. Ocean Sci. 2018, 14, 1581–1601. [Google Scholar] [CrossRef]
- Zeinstra-Helfrich, M.; Murk, A.J. Effects of Oil Properties and Slick Thickness on Dispersant Field Effectiveness and Oil Fate. In Deep Oil Spills; Springer: Cham, Switzerland, 2020; pp. 155–169. [Google Scholar]
- Buist, I.; Potter, S.; Mackay, D.; Charles, M. Laboratory studies on the behavior and cleanup of waxy crude oil spills. In Proceedings of the International Oil Spill Conference, San Antonio, TX, USA, 13–16 February 1989; pp. 105–113. [Google Scholar]
- Reed, M.; Turner, C.; Odulo, A. The role of wind and emulsification in modelling oil spill and surface drifter trajectories. Spill Sci. Technol. Bull. 1994, 1, 143–157. [Google Scholar] [CrossRef]
- Delvigne, G.A. Natural dispersion of oil by different sources of turbulence. In Proceedings of the International Oil Spill Conference, Tampa, FL, USA, 29 March–1 April 1993; pp. 415–419. [Google Scholar]
- French-McCay, D.; Isaji, T. Evaluation of the consequences of chemical spills using modeling: Chemicals used in deepwater oil and gas operations. Environ. Model. Softw. 2004, 19, 629–644. [Google Scholar] [CrossRef]
- Reed, M.; Rye, H. A three-dimensional oil and chemical spill model for environmental impact assessment. In Proceedings of the International Oil Spill Conference, Long Beach, CA, USA, 27 February–2 March 1995; pp. 61–66. [Google Scholar]
- Reed, M.; Aamo, O.M.; Daling, P.S. Quantitative analysis of alternate oil spill response strategies using OSCAR. Spill Sci. Technol. Bull. 1995, 2, 67–74. [Google Scholar] [CrossRef]
- Aamo, O.; Downing, K.; Reed, M. Calibration, verification, and sensitivity analysis of the IKU oil spill contingency and response (OSCAR) model system. Report 1996, 42, 4048. [Google Scholar]
- Aamo, O.M.; Reed, M.; Downing, K. Oil spill contingency and response (OSCAR) model system: Sensitivity studies. In Proceedings of the International Oil Spill Conference, Fort Lauderdale, FL, USA, 7–10 April 1997; pp. 429–438. [Google Scholar]
- Spaulding, M.; Kolluru, V.; Anderson, E.; Howlett, E. Application of three-dimensional oil spill model (WOSM/OILMAP) to hindcast the Braer spill. Spill Sci. Technol. Bull. 1994, 1, 23–35. [Google Scholar] [CrossRef]
- Lardner, R.; Zodiatis, G.; Loizides, L.; Demetropoulos, A. An operational oil spill model for the Levantine Basin (Eastern Mediterranean Sea). In Proceedings of the International Symposium on Marine Pollution, Monaco, 5–9 October 1998; IAEA: Vienna, Austria, 1999. [Google Scholar]
- Lardner, R.; Zodiatis, G.; Hayes, D.; Pinardi, N. Application of the MEDSLIK Oil Spill Model to the Lebanese Spill of July 2006; European Group of Experts on Satellite Monitoring of Sea Based Oil Pollution; European Communities: Brussels, Belgium, 2006; pp. 1018–5593. [Google Scholar]
- Zodiatis, G.; Lardner, R.; Hayes, D.; Georgiou, G.; Pinardi, N.; De Dominicis, M.; Panayidou, X. The Mediterranean oil spill and trajectory prediction model in assisting the EU response agencies. In Proceedings of the Congreso Nacional de Salvamento en la Mar, Cadiz, Spain, 2–4 October 2008; pp. 2–4. [Google Scholar]
- Li, C.; Miller, J.; Wang, J.; Koley, S.; Katz, J. Size distribution and dispersion of droplets generated by impingement of breaking waves on oil slicks. J. Geophys. Res. Ocean. 2017, 122, 7938–7957. [Google Scholar] [CrossRef]
- Li, Z.; Spaulding, M.; McCay, D.F.; Crowley, D.; Payne, J.R. Development of a unified oil droplet size distribution model with application to surface breaking waves and subsea blowout releases considering dispersant effects. Mar. Pollut. Bull. 2017, 114, 247–257. [Google Scholar] [CrossRef] [PubMed]
- Zeinstra-Helfrich, M.; Koops, W.; Murk, A.J. How oil properties and layer thickness determine the entrainment of spilled surface oil. Mar. Pollut. Bull. 2016, 110, 184–193. [Google Scholar] [CrossRef]
- Reed, M.; Johansen, O.; Leirvik, F.; Brørs, B. Numerical Algorithm to Compute the Effects of BreakingWaves on Surface Oil Spilled at Sea; Final Report Submitted to the Coastal Response Research Center; Report F; SINTEF Institute for Materials and Chemistry: Trondheim, Norway, 2009; p. 131. [Google Scholar]
- Holthuijsen, L.; Herbers, T. Statistics of breaking waves observed as whitecaps in the open sea. J. Phys. Oceanogr. 1986, 16, 290–297. [Google Scholar] [CrossRef]
- Callaghan, A.H.; Deane, G.B.; Stokes, M.D. Observed physical and environmental causes of scatter in whitecap coverage values in a fetch-limited coastal zone. J. Geophys. Res. Ocean. 2008, 113, C05022. [Google Scholar] [CrossRef]
- Zhao, D.; Toba, Y. Dependence of whitecap coverage on wind and wind-wave properties. J. Oceanogr. 2001, 57, 603–616. [Google Scholar] [CrossRef]
- Johansen, Ø.; Reed, M.; Bodsberg, N.R. Natural dispersion revisited. Mar. Pollut. Bull. 2015, 93, 20–26. [Google Scholar] [CrossRef]
- Zeinstra-Helfrich, M.; Koops, W.; Murk, A.J. Predicting the consequence of natural and chemical dispersion for oil slick size over time. J. Geophys. Res. Ocean. 2017, 122, 7312–7324. [Google Scholar] [CrossRef]
- Li, Z.; Spaulding, M.L.; French-McCay, D. An algorithm for modeling entrainment and naturally and chemically dispersed oil droplet size distribution under surface breaking wave conditions. Mar. Pollut. Bull. 2017, 119, 145–152. [Google Scholar] [CrossRef] [PubMed]
- Hou, X.; Hodges, B.R. Hydrodynamic Uncertainty in Oil Spill Modeling; Center for Research in Water Resources, University of Texas at Austin: Austin, TX, USA, 2013. [Google Scholar]
- Warner, J.C.; Sherwood, C.R.; Arango, H.G.; Signell, R.P. Performance of four turbulence closure models implemented using a generic length scale method. Ocean Model. 2005, 8, 81–113. [Google Scholar] [CrossRef]
- Sundby, S. A one-dimensional model for the vertical distribution of pelagic fish eggs in the mixed layer. Deep Sea Res. Part A Oceanogr. Res. Pap. 1983, 30, 645–661. [Google Scholar] [CrossRef]
- Sperrevik, A.K.; Röhrs, J.; Christensen, K.H. Impact of data assimilation on E ulerian versus L agrangian estimates of upper ocean transport. J. Geophys. Res. Ocean. 2017, 122, 5445–5457. [Google Scholar] [CrossRef]
- Nordam, T.; Kristiansen, R.; Nepstad, R.; Röhrs, J. Numerical analysis of boundary conditions in a Lagrangian particle model for vertical mixing, transport and surfacing of buoyant particles in the water column. Ocean Model. 2019, 136, 107–119. [Google Scholar] [CrossRef]
- Visser, A.W. Using random walk models to simulate the vertical distribution of particles in a turbulent water column. Mar. Ecol. Prog. Ser. 1997, 158, 275–281. [Google Scholar] [CrossRef]
- Li, Y.; Zhu, J.; Wang, H. The impact of different vertical diffusion schemes in a three-dimensional oil spill model in the Bohai Sea. Adv. Atmos. Sci. 2013, 30, 1569–1586. [Google Scholar] [CrossRef]
- Drivdal, M.; Broström, G.; Christensen, K. Wave-induced mixing and transport of buoyant particles: Application to the Statfjord A oil spill. Ocean Sci. 2014, 10, 977. [Google Scholar] [CrossRef]
- Lardner, R.; Zodiatis, G. Modelling oil plumes from subsurface spills. Mar. Pollut. Bull. 2017, 124, 94–101. [Google Scholar] [CrossRef]
- Zodiatis, G.; Lardner, R.; Alves, T.M.; Krestenitis, Y.; Perivoliotis, L.; Sofianos, S.; Spanoudaki, K. Oil spill forecasting (prediction). J. Mar. Res. 2017, 75, 923–953. [Google Scholar] [CrossRef]
- Zhu, H.; You, J.; Zhao, H. An experimental investigation of underwater spread of oil spill in a shear flow. Mar. Pollut. Bull. 2017, 116, 156–166. [Google Scholar] [CrossRef]
- Nagheeby, M.; Kolahdoozan, M. Numerical modeling of two-phase fluid flow and oil slick transport in estuarine water. Int. J. Environ. Sci. Technol. 2010, 7, 771–784. [Google Scholar] [CrossRef]
- Copernicus Marine Service. Available online: http://marine.copernicus.eu/ (accessed on 3 August 2020).
- Zodiatis, G.; Lardner, R.; Solovyov, D.; Panayidou, X.; De Dominicis, M. Predictions for oil slicks detected from satellite images using MyOcean forecasting data. Ocean Sci. 2012, 8, 1105–1115. [Google Scholar] [CrossRef]
- Klemas, V. Tracking oil slicks and predicting their trajectories using remote sensors and models: Case studies of the Sea Princess and Deepwater Horizon oil spills. J. Coast. Res. 2010, 26, 789–797. [Google Scholar] [CrossRef]
- Liu, Y.; Weisberg, R.H.; Hu, C.; Zheng, L. Tracking the Deepwater Horizon oil spill: A modeling perspective. Eos Trans. Am. Geophys. Union 2011, 92, 45–46. [Google Scholar] [CrossRef]
- Lehr, W.; Socolofsky, S.A. The Importance of Understanding Fundamental Physics and Chemistry of Deep Oil Blowouts. In Deep Oil Spills; Springer: Cham, Switzerland, 2020; pp. 14–24. [Google Scholar]
- Murawski, S.A.; Ainsworth, C.H.; Gilbert, S.; Hollander, D.J.; Paris, C.B.; Schlüter, M.; Wetzel, D.L. Scenarios and Responses to Future Deep Oil Spills: Fighting the Next War; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar]
- Murray, K.J.; Boehm, P.D.; Prince, R.C. The Importance of Understanding Transport and Degradation of Oil and Gasses from Deep-Sea Blowouts. In Deep Oil Spills; Springer: Cham, Switzerland, 2020; pp. 86–106. [Google Scholar]
- Sim, L.; Graham, J.; Rose, K.; Duran, R.; Nelson, J.; Umhoefer, J.; Vielma, J. Developing a Comprehensive Deepwater Blowout and Spill Model; U.S. Department of Energy, National Energy Technology Laboratory: Albany, NY, USA, 2015; p. 44.
- Yapa, P.D.; Wimalaratne, M.R.; Dissanayake, A.L.; DeGraff, J.A., Jr. How does oil and gas behave when released in deepwater? J. Hydro Environ. Res. 2012, 6, 275–285. [Google Scholar] [CrossRef]
- Oldenburg, T.B.; Jaeger, P.; Gros, J.; Socolofsky, S.A.; Pesch, S.; Radović, J.R.; Jaggi, A. Physical and Chemical Properties of Oil and Gas Under Reservoir and Deep-Sea Conditions. In Deep Oil Spills; Springer: Cham, Switzerland, 2020; pp. 25–42. [Google Scholar]
- Pesch, S.; Schlüter, M.; Aman, Z.M.; Malone, K.; Krause, D.; Paris, C.B. Behavior of Rising Droplets and Bubbles: Impact on the Physics of Deep-Sea Blowouts and Oil Fate. In Deep Oil Spills; Springer: Cham, Switzerland, 2020; pp. 65–82. [Google Scholar]
- Vaz, A.C.; Paris, C.B.; Dissanayake, A.L.; Socolofsky, S.A.; Gros, J.; Boufadel, M.C. Dynamic Coupling of Near-Field and Far-Field Models. In Deep Oil Spills; Springer: Cham, Switzerland, 2020; pp. 139–154. [Google Scholar]
- Masutani, S.M.; Adams, E.E. Experimental Study of Multi-Phase Plumes with Application to Deep Ocean Oil Spills; Hawaii Natural Energy Institute, University of Hawaii: Herndon, VA, USA, 2001. [Google Scholar]
- Boxall, J.A.; Koh, C.A.; Sloan, E.D.; Sum, A.K.; Wu, D.T. Droplet size scaling of water-in-oil emulsions under turbulent flow. Langmuir 2012, 28, 104–110. [Google Scholar] [CrossRef]
- Lefebvre, A.H.; McDonell, V.G. Atomization and Sprays; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Malone, K.; Aman, Z.M.; Pesch, S.; Schlüter, M.; Krause, D. Jet formation at the spill site and resulting droplet size distributions. In Deep Oil Spills; Springer: Cham, Switzerland, 2020; pp. 43–64. [Google Scholar]
- Johansen, Ø.; Brandvik, P.J.; Farooq, U. Droplet breakup in subsea oil releases–Part 2: Predictions of droplet size distributions with and without injection of chemical dispersants. Mar. Pollut. Bull. 2013, 73, 327–335. [Google Scholar] [CrossRef]
- Wang, B.; Socolofsky, S.A.; Lai, C.C.; Adams, E.E.; Boufadel, M.C. Behavior and dynamics of bubble breakup in gas pipeline leaks and accidental subsea oil well blowouts. Mar. Pollut. Bull. 2018, 131, 72–86. [Google Scholar] [CrossRef]
- Bandara, U.C.; Yapa, P.D. Bubble Sizes, Breakup, and Coalescence in Deepwater Gas/Oil Plumes; 0733-9429; American Society of Civil Engineers: Reston, VA, USA, 2011; pp. 729–738. [Google Scholar]
- Zhao, L.; Boufadel, M.C.; Socolofsky, S.A.; Adams, E.; King, T.; Lee, K. Evolution of droplets in subsea oil and gas blowouts: Development and validation of the numerical model VDROP-J. Mar. Pollut. Bull. 2014, 83, 58–69. [Google Scholar] [CrossRef]
- Zhao, L.; Boufadel, M.C.; Adams, E.; Socolofsky, S.A.; King, T.; Lee, K.; Nedwed, T. Simulation of scenarios of oil droplet formation from the Deepwater Horizon blowout. Mar. Pollut. Bull. 2015, 101, 304–319. [Google Scholar] [CrossRef] [PubMed]
- Zhao, L.; Boufadel, M.C.; King, T.; Robinson, B.; Gao, F.; Socolofsky, S.A.; Lee, K. Droplet and bubble formation of combined oil and gas releases in subsea blowouts. Mar. Pollut. Bull. 2017, 120, 203–216. [Google Scholar] [CrossRef]
- Johansen, Ø.; Rye, H.; Cooper, C. DeepSpill––field study of a simulated oil and gas blowout in deep water. Spill Sci. Technol. Bull. 2003, 8, 433–443. [Google Scholar] [CrossRef]
- Yapa, P.D.; Zheng, L.; Chen, F. A model for deepwater oil/gas blowouts. Mar. Pollut. Bull. 2001, 43, 234–241. [Google Scholar] [CrossRef]
- Chen, F.; Yapa, P.D. A model for simulating deep water oil and gas blowouts-Part II: Comparison of numerical simulations with “Deepspill” field experiments. J. Hydraul. Res. 2003, 41, 353–365. [Google Scholar] [CrossRef]
- Fraga, B.; Stoesser, T.; Lai, C.C.; Socolofsky, S.A. A LES-based Eulerian–Lagrangian approach to predict the dynamics of bubble plumes. Ocean Model. 2016, 97, 27–36. [Google Scholar] [CrossRef]
- Zodiatis, G.; Coppini, G.; Perivoliotis, L.; Lardner, R.; Alves, T.; Pinardi, N.; Liubartseva, S.; De Dominicis, M.; Bourma, E.; Neves, A.A.S. Numerical modeling of oil pollution in the Eastern Mediterranean Sea. In Oil Pollution in the Mediterranean Sea: Part I; Springer: Cham, Switzerland, 2017; pp. 215–254. [Google Scholar]
- Carpenter, A.; Kostianoy, A.G. Oil Pollution in the Mediterranean Sea: Part I: The International Context; Springer: Berlin/Heidelberg, Germany, 2019; Volume 83. [Google Scholar]
- De Dominicis, M.; Falchetti, S.; Trotta, F.; Pinardi, N.; Giacomelli, L.; Napolitano, E.; Fazioli, L.; Sorgente, R.; Haley, P.J., Jr.; Lermusiaux, P.F. A relocatable ocean model in support of environmental emergencies. Ocean Dyn. 2014, 64, 667–688. [Google Scholar] [CrossRef]
- De Dominicis, M.; Bruciaferri, D.; Gerin, R.; Pinardi, N.; Poulain, P.; Garreau, P.; Zodiatis, G.; Perivoliotis, L.; Fazioli, L.; Sorgente, R. A multi-model assessment of the impact of currents, waves and wind in modelling surface drifters and oil spill. Deep Sea Res. Part II Top. Stud. Oceanogr. 2016, 133, 21–38. [Google Scholar] [CrossRef]
- ASTM D6521-19. Standard Practice for Accelerated Aging of Asphalt Binder Using a Pressurized Aging Vessel (PAV); ASTM: West Conshohocken, PA, USA, 2019. [Google Scholar]
- Liubartseva, S.; Coppini, G.; Pinardi, N.; De Dominicis, M.; Lecci, R.; Turrisi, G.; Cretì, S.; Martinelli, S.; Agostini, P.; Marra, P. Decision support system for emergency management of oil spill accidents in the Mediterranean Sea. Nat. Hazards Earth Syst. Sci. 2016, 16, 2009–2020. [Google Scholar] [CrossRef]
- Zelenke, B.; O’Connor, C.; Barker, C.H.; Beegle-Krause, C.; Eclipse, L. General NOAA Operational Modeling Environment (GNOME) Technical Documentation; U.S. Department of Commerce: Seattle, WA, USA, 2012.
- Beegle-Krause, J. General NOAA oil modeling environment (GNOME): A new spill trajectory model. In Proceedings of the International Oil Spill Conference, Tampa, FL, USA, 26–29 March 2001; pp. 865–871. [Google Scholar]
- Bergin, M.S.; Noblet, G.S.; Petrini, K.; Dhieux, J.R.; Milford, J.B.; Harley, R.A. Formal uncertainty analysis of a Lagrangian photochemical air pollution model. Environ. Sci. Technol. 1999, 33, 1116–1126. [Google Scholar] [CrossRef]
- Fingas, M.; Brown, C. Oil spill remote sensing. In Earth System Monitoring; Springer: New York, NY, USA, 2013; pp. 337–388. [Google Scholar]
- Fingas, M.; Brown, C.E. A review of oil spill remote sensing. Sensors 2018, 18, 91. [Google Scholar] [CrossRef] [PubMed]
- Yapa, P.D.; Zheng, L. Modelling oil and gas releases from deep water: A review. Spill Sci. Technol. Bull. 1997, 4, 189–198. [Google Scholar] [CrossRef]
- Zheng, L.; Yapa, P.D.; Chen, F. A model for simulating deepwater oil and gas blowouts-Part I: Theory and model formulation. J. Hydraul. Res. 2003, 41, 339–351. [Google Scholar] [CrossRef]
- Leech, M.; Tyler, A.; Wiltshire, M. OSIS: A PC-based oil spill information system. In Proceedings of the International Oil Spill Conference, Tampa, FL, USA, 29 March–1 April 1993; pp. 863–864. [Google Scholar]
- ASA. OILMAP for Windows (Technical Manual); ASA: Narrangansett, RI, USA, 1997. [Google Scholar]
- Crowley, D.; Mendelsohn, D.; Mulanaphy, N.W.; Li, Z.; Spaulding, M. Modeling subsurface dispersant applications for response planning and preparation. In Proceedings of the International Oil Spill Conference Proceedings, Savannah, GA, USA, 5–8 May 2014; pp. 933–948. [Google Scholar]
- Spaulding, M.; Mendelsohn, D.; Crowley, D.; Li, Z.; Bird, A. Draft Technical Reports for Deepwater Horizon Water Column Injury Assessment: WC_TR. 13: Application of OILMAP DEEP to the Deepwater Horizon Blowout; Prepared for National Oceanic Atmospheric Administration; RPS ASA: South Kingstown, RI, USA, 2015. [Google Scholar]
- Spaulding, M.; Li, Z.; Mendelsohn, D.; Crowley, D.; French-McCay, D.; Bird, A. Application of an integrated blowout model system, OILMAP DEEP, to the Deepwater Horizon (DWH) spill. Mar. Pollut. Bull. 2017, 120, 37–50. [Google Scholar] [CrossRef]
- French McCay, D.; Jayko, K.; Li, Z.; Horn, M.; Kim, Y.; Isaji, T.; Crowley, D.; Spaulding, M.; Decker, L.; Turner, C. Technical Reports for Deepwater Horizon Water Column Injury Assessment–WC_TR14: Modeling Oil Fate and Exposure Concentrations in the Deepwater Plume and Cone of Rising Oil Resulting from the Deepwater Horizon Oil Spill; RPS ASA: South Kingstown, RI, USA, 2015. [Google Scholar]
- Gros, J.; Reddy, C.M.; Nelson, R.K.; Socolofsky, S.A.; Arey, J.S. Simulating gas–liquid–water partitioning and fluid properties of petroleum under pressure: Implications for deep-sea blowouts. Environ. Sci. Technol. 2016, 50, 7397–7408. [Google Scholar] [CrossRef] [PubMed]
- Gros, J.; Socolofsky, S.A.; Dissanayake, A.L.; Jun, I.; Zhao, L.; Boufadel, M.C.; Reddy, C.M.; Arey, J.S. Petroleum dynamics in the sea and influence of subsea dispersant injection during Deepwater Horizon. Proc. Natl. Acad. Sci. USA 2017, 114, 10065–10070. [Google Scholar] [CrossRef]
- Gros, J.; Arey, J.S.; Socolofsky, S.A.; Dissanayake, A.L. Dynamics of live oil droplets and natural gas bubbles in deep water. Environ. Sci. Technol. 2020, 54, 11865–11875. [Google Scholar] [CrossRef]
- Daniel, P. Operational forecasting of oil spill drift at Météo-France. Pract. Appl. Eng. 1996, 3, 53–64. [Google Scholar] [CrossRef]
- Daniel, P.; Jan, G.; Cabioc’h, F.; Landau, Y.; Loiseau, E. Drift modeling of cargo containers. Spill Sci. Technol. Bull. 2002, 7, 279–288. [Google Scholar] [CrossRef]
- Daniel, P.; Marty, F.; Josse, P.; Skandrani, C.; Benshila, R. Improvement of drift calculation in Mothy operational oil spill prediction system. In Proceedings of the International Oil Spill Conference, Vancouver, BC, Canada, 6–11 April 2003; pp. 1067–1072. [Google Scholar]
- Daniel, P.; Josse, P.; Dandin, P. Further improvement of drift forecast at sea based on operational oceanography systems. WIT Trans. Built Environ. 2005, 78. [Google Scholar] [CrossRef]
- Brovchenko, I.; Kuschan, A.; Maderich, V.; Zheleznyak, M. The modelling system for simulation of the oil spills in the Black Sea. In Proceedings of the 3rd EuroGOOS Conference: Building the European Capacity in Operational Oceanography, Athens, Greece, 3–6 December 2002. [Google Scholar]
- Carracedo, P.; Torres-Lopez, S.; Barreiro, M.; Montero, P.; Balseiro, C.F.; Penabad, E.; Leitao, P.C.; Perez-Munuzuri, V. Improvement of pollutant drift forecast system applied to the Prestige oil spills in Galicia Coast (NW of Spain): Development of an operational system. Mar. Pollut. Bull. 2006, 53, 350–360. [Google Scholar] [CrossRef] [PubMed]
- Pollani, A.; Triantafyllou, G.; Petihakis, G.; Nittis, K.; Dounas, C.; Koutitas, C. The Poseidon operational tool for the prediction of floating pollutant transport. Mar. Pollut. Bull. 2001, 43, 270–278. [Google Scholar] [CrossRef]
- Berry, A.; Dabrowski, T.; Lyons, K. The oil spill model OILTRANS and its application to the Celtic Sea. Mar. Pollut. Bull. 2012, 64, 2489–2501. [Google Scholar] [CrossRef]
- Legrand, S.; Duliere, V. OSERIT: An oil spill evaluation and response integrated tool. In Proceedings of the Book of Abstracts of the Fourth International Conference on the Application of Physical Modelling to Port and Coastal Protection, Ghent, Belgium, 17–20 September 2012; pp. 275–276. [Google Scholar]
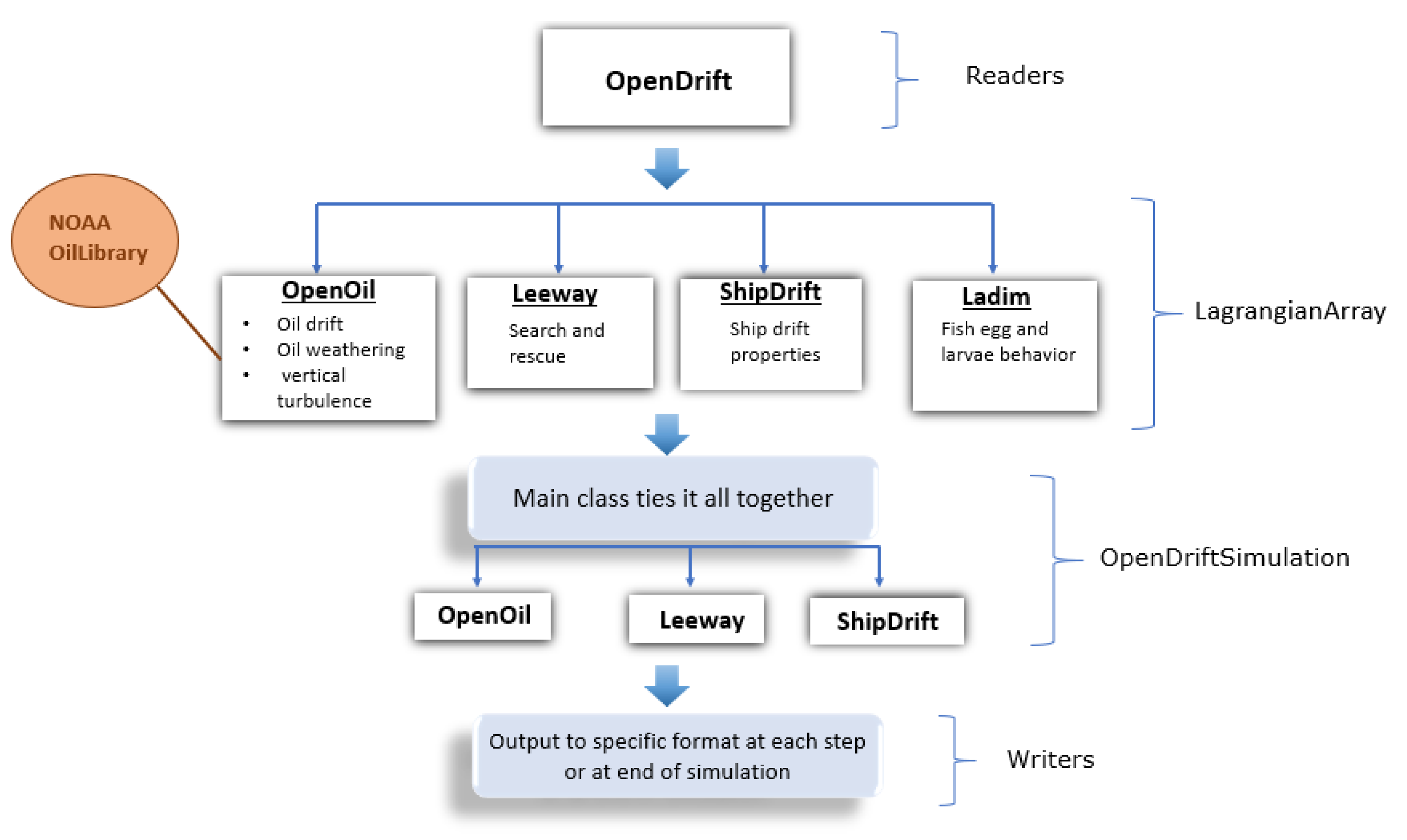
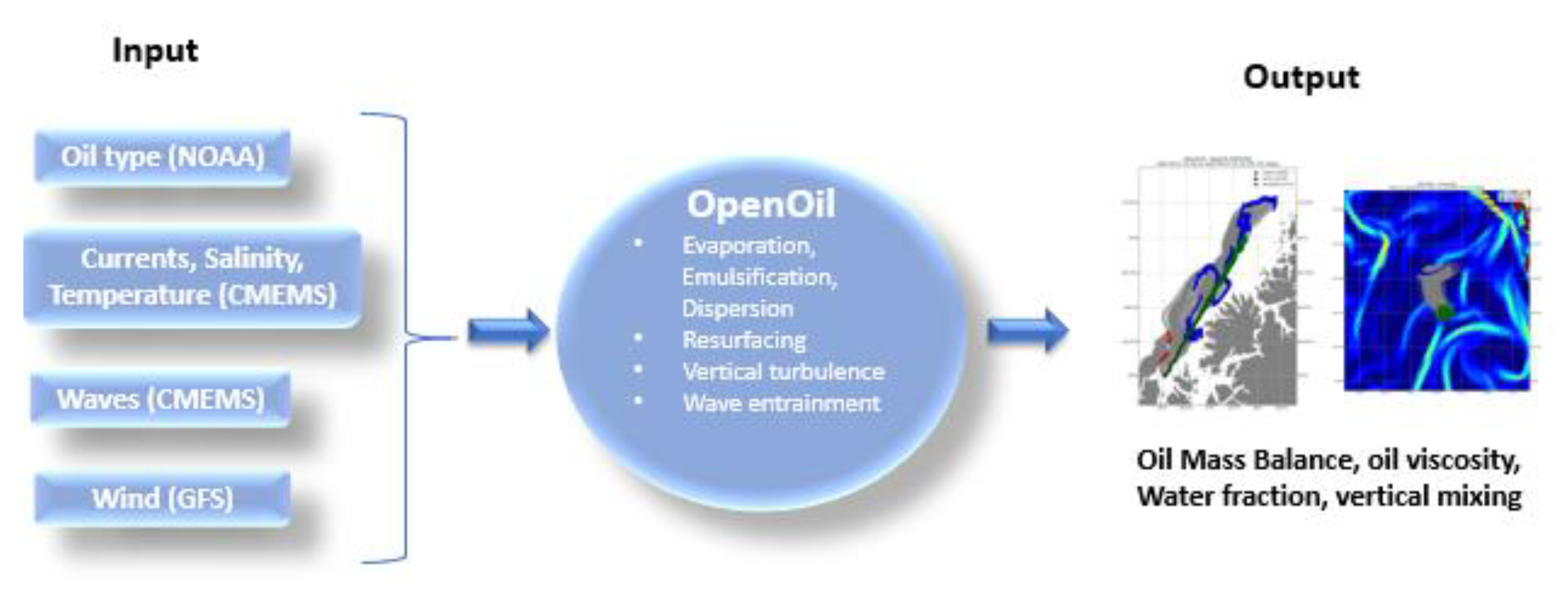
- Dagestad, K.F.; Röhrs, J.; Breivik, Ø.; Ådlandsvik, B. OpenDrift v1.0: A generic framework for trajectory modelling. Geosci. Model Dev. 2018, 11, 1405–1420. [Google Scholar] [CrossRef]
- Yapa, P.D.; Li, Z. Simulation of oil spills from underwater accidents I: Model development. J. Hydraul. Res. 1997, 35, 673–688. [Google Scholar] [CrossRef]
- Yapa, P.D.; Chen, F. Behavior of oil and gas from deepwater blowouts. J. Hydraul. Eng. 2004, 130, 540–553. [Google Scholar] [CrossRef]
- Crowley, D.; French-McCay, D.; Santos, L.; Chowdhury, B.; Markussen, R. Modeling atmospheric volatile organic compound concentrations resulting from a deepwater oil well blowout–Mitigation by subsea dispersant injection. Mar. Pollut. Bull. 2018, 136, 152–163. [Google Scholar] [CrossRef] [PubMed]
- Yapa, P.; Zheng, L.; Chen, F. Clarkson Deepwater Oil & Gas∼ CDOG Model; Department of Civil and Environmental Engineering, Clarkson University: Potsdam, NY, USA, 2001. [Google Scholar]
- French-McCay, D.; Crowley, D.; Rowe, J.J.; Bock, M.; Robinson, H.; Wenning, R.; Walker, A.H.; Joeckel, J.; Nedwed, T.J.; Parkerton, T.F. Comparative risk assessment of spill response options for a deepwater oil well blowout: Part 1. Oil spill modeling. Mar. Pollut. Bull. 2018, 133, 1001–1015. [Google Scholar] [CrossRef] [PubMed]
- Spaulding, M.; Bishnoi, P.; Anderson, E.; Isaji, T. An integrated model for prediction of oil transport from a deep water blowout. In Proceedings of the Arctic and Marine Oilspill Program Technical Seminar, Vancouver, BC, Canada, 14–16 June 2000; pp. 611–636. [Google Scholar]
- French, D.P.; Schuttenberg, H.Z.; Isaji, T. Probabilities of oil exceeding thresholds of concern: Examples from an evaluation for Florida Power and Light. In Proceedings of the Arctic and Marine Oilspill Program Technical Seminar, Calgary, AB, Canada, 2–4 June 1999; pp. 243–270. [Google Scholar]
- French, D.P.; Rines, H.M. Validation and use of spill impact modeling for impact assessment. In Proceedings of the International Oil Spill Conference, Fort Lauderdale, FL, USA, 6–9 April 1997; pp. 829–834. [Google Scholar]
- Aamo, O.M.; Reed, M.; Daling, P. A Laboratory-Based Weathering Model: PC Version for Coupling to Transport Models; Environment Canada: Ottawa, ON, Canada, 1993.
- Daling, P.S.; Brandvik, P.J.; Mackay, D.; Johansen, O. Characterization of crude oils for environmental purposes. Oil Chem. Pollut. 1990, 7, 199–224. [Google Scholar] [CrossRef]
- Daling, P.S.; Brandvik, P.J. Characterization and Prediction of the Weathering Properties of Oils at Sea-A Manual for the Oils Investigated in the DIWO Project; Institutt for Kontinentalundersoekelser og Petroleumsteknologi A/S: Trondheim, Norway, 1991. [Google Scholar]
- Downing, K.; Reed, M. Object-oriented migration modelling for biological impact assessment. Ecol. Model. 1996, 93, 203–219. [Google Scholar] [CrossRef]
- Spaulding, M.; Howlett, E.; Anderson, E.; Jayko, K. OILMAP: A Global Approach to Spill Modeling; Environment Canada: Ottawa, ON, Canada, 1992.
- Howlett, E.; Jayko, K.; Isaji, T.; Anid, P.; Gary, M.; Francois, S. Marine forecasting and oil spill modeling in Dubai and the Gulf region. In Proceedings of the CODEPEC VII, Dubai, UAE, 24–28 February 2018. [Google Scholar]
- McGinnis, D.F.; Greinert, J.; Artemov, Y.; Beaubien, S.E.; Wüest, A. Fate of rising methane bubbles in stratified waters: How much methane reaches the atmosphere? J. Geophys. Res. Ocean. 2006, 111. [Google Scholar] [CrossRef]
- Socolofsky, S.A.; Bhaumik, T.; Seol, D.-G. Double-plume integral models for near-field mixing in multiphase plumes. J. Hydraul. Eng. 2008, 134, 772–783. [Google Scholar] [CrossRef]
- Daniel, P.; Josse, P.; Dandin, P.; Gouriou, V.; Marchand, M.; Tiercelin, C. Forecasting the Erika oil spills. In Proceedings of the International Oil Spill Conference, Tampa, FL, USA, 26–29 March 2001; pp. 649–655. [Google Scholar]
- Daniel, P. Drift Forecasts for the Erika and Prestige Oil Spills. Pract. Appl. Eng. 2010, 4, 301–308. [Google Scholar]
- Cucco, A.; Daniel, P. Numerical modeling of oil pollution in the Western Mediterranean Sea. In Oil Pollution in the Mediterranean Sea: Part I; Springer: Cham, Switzerland, 2016; pp. 255–274. [Google Scholar]
- Zodiatis, G.; De Dominicis, M.; Perivoliotis, L.; Radhakrishnan, H.; Georgoudis, E.; Sotillo, M.; Lardner, R.; Krokos, G.; Bruciaferri, D.; Clementi, E. The Mediterranean decision support system for marine safety dedicated to oil slicks predictions. Deep Sea Res. Part II Top. Stud. Oceanogr. 2016, 133, 4–20. [Google Scholar] [CrossRef]
- Daniel, P.; Josse, P.; Dandin, P.; Lefevre, J.-M.; Lery, G.; Cabioch, F.; Gouriou, V. Forecasting the Prestige oil spills. In Proceedings of the Interspill 2004 Conference, Trondheim, Norway, 14–17 June 2004. [Google Scholar]
- Brovchenko, I.; Maderich, V. Numerical Lagrangian method for the modelling of the surface oil slick. Appl. Hydromech. 2002, 4, 23–31. [Google Scholar]
- Saraiva, S.; Fernandes, L.; Leitão, P.C.; Pina, P.; Santos, F.B.; Neves, R. MaBenE Deliverable D4. 5–Part II Integrated modelling tool-MOHID Water Modelling System. 2006. [Google Scholar]
- Perivoliotis, L.; Krokos, G.; Nittis, K.; Korres, G. The Aegean sea marine security decision support system. Ocean Sci. 2011, 7, 671. [Google Scholar] [CrossRef]
- Oil Spill Fate and Trajectory Model. Available online: https://poseidon.hcmr.gr/components/forecasting-components/oil-spill-model (accessed on 20 November 2020).
- NOAA-ORR-ERD. Available online: https://github.com/NOAA-ORR-ERD (accessed on 5 November 2020).
- ADIOS Oil Database. Available online: https://adios-stage.orr.noaa.gov (accessed on 10 December 2020).
- GNOME Online Oceanographic Data Server. Available online: https://gnome.orr.noaa.gov/goods (accessed on 15 December 2020).
- North, E.W.; Adams, E.E.; Schlag, Z.; Sherwood, C.R.; He, R.; Hyun, K.H.; Socolofsky, S.A. Simulating oil droplet dispersal from the Deepwater Horizon spill with a Lagrangian approach. Geophys. Monogr. Ser 2011, 195, 217–226. [Google Scholar]
- Berry, A. Development of OILTRANS Model Code, Drift and Pollutants Behaviour Prediction ARCOPOL: The Atlantic Regions Coastal Pollution Response, Atlantic Area Transnational Programme, version 1.0; European Union: Brussels, Belgium, 2011; p. 24. [Google Scholar]
- Berry, A. OILTRANS: Oil Spill Modelling Software Application User Manual; European Union: Brussels, Belgium, 2012. [Google Scholar]
- Dulière, V.; Legrand, S.; Ovidio, F. Development of an Integrated Software for Forecasting the Impacts of Accidental Oil Pollution (OSERIT); Royal Belgian Institute of Natural Sciences: Brussels, Belgium, 2010. [Google Scholar]
- Jokuty, P.; Whiticar, S.; Wang, Z.; Fingas, M.; Fieldhouse, B.; Lambert, P.; Mullin, J.J.E.-O. Properties of Crude Oils and Oil Products; Environment Canada: Ottawa, ON, Canada, 1999.
- Sim, L.H. Blowout and Spill Occurrence Model; Oregon State University: Corvallis, OR, USA, 2013. [Google Scholar]
- Duran, R.; Romeo, L.; Whiting, J.; Vielma, J.; Rose, K.; Bunn, A.; Bauer, J. Simulation of the 2003 foss barge-point wells oil spill: A comparison between BLOSOM and GNOME oil spill models. J. Mar. Sci. Eng. 2018, 6, 104. [Google Scholar] [CrossRef]
- Socolofsky, S.A.; Adams, E.E.; Boufadel, M.C.; Aman, Z.M.; Johansen, Ø.; Konkel, W.J.; Lindo, D.; Madsen, M.N.; North, E.W.; Paris, C.B. Intercomparison of oil spill prediction models for accidental blowout scenarios with and without subsea chemical dispersant injection. Mar. Pollut. Bull. 2015, 96, 110–126. [Google Scholar] [CrossRef] [PubMed]
- Rye, H.; Brandvik, P.; Reed, M. Subsurface oil release field experiment-observations and modelling of subsurface plume behaviour. In Proceedings of the Arctic and Marine Oilspill Program Technical Seminar, Calgary, AB, Canada, 12–14 June 1996; pp. 1417–1436. [Google Scholar]
- Rye, H.; Brandvik, P.J. Verification of subsurface oil spill models. In Proceedings of the International Oil Spill Conference, Fort Lauderdale, FL, USA, 7–10 April 1997; pp. 551–557. [Google Scholar]
- Deltares. D-WAQ PART, User Manual; Deltares: Delft, The Netherlands, 2018. [Google Scholar]
- Bi, H.; Si, H. Dynamic risk assessment of oil spill scenario for Three Gorges Reservoir in China based on numerical simulation. Saf. Sci. 2012, 50, 1112–1118. [Google Scholar] [CrossRef]
- Wang, Y.; Zheng, X.; Yu, X.; Liu, X. Temperature and salinity effects in modeling the trajectory of the 2011 Penglai 19-3 oil spill. Mar. Georesour. Geotechnol. 2017, 35, 946–953. [Google Scholar] [CrossRef]
- Rubinstein, R.Y.; Kroese, D.P. Simulation and the Monte Carlo Method; John Wiley & Sons: Hoboken, NJ, USA, 2016; Volume 10. [Google Scholar]
- Rubinstein, R. Simulation and the Monte Carlo Method; Wiley: New York, NY, USA, 1981. [Google Scholar]
- De Dominicis, M.; Leuzzi, G.; Monti, P.; Pinardi, N.; Poulain, P.-M. Eddy diffusivity derived from drifter data for dispersion model applications. Ocean Dyn. 2012, 62, 1381–1398. [Google Scholar] [CrossRef]
- Ahlstrom, S. A Mathematical Model for Predicting the Transport of Oil Slicks in Marine Waters; Battelle, Pacific Northwest Laboratories: Richland, WA, USA, 1975. [Google Scholar]
- Hunter, J. The Application of Lagrangian Particle-Tracking Techniques to Modelling of Dispersion in The Sea. North Holl. Math. Stud. 1987, 145, 257–269. [Google Scholar] [CrossRef]
- Hasselmann, K. On the spectral dissipation of ocean waves due to white capping. Bound. Layer Meteorol. 1974, 6, 107–127. [Google Scholar] [CrossRef]
- Coppini, G.; De Dominicis, M.; Zodiatis, G.; Lardner, R.; Pinardi, N.; Santoleri, R.; Colella, S.; Bignami, F.; Hayes, D.R.; Soloviev, D. Hindcast of oil-spill pollution during the Lebanon crisis in the Eastern Mediterranean, July–August 2006. Mar. Pollut. Bull. 2011, 62, 140–153. [Google Scholar] [CrossRef] [PubMed]
- Samaras, A.G.; De Dominicis, M.; Archetti, R.; Lamberti, A.; Pinardi, N. Towards improving the representation of beaching in oil spill models: A case study. Mar. Pollut. Bull. 2014, 88, 91–101. [Google Scholar] [CrossRef]
- Rutherford, R.; Moulitsas, I.; Snow, B.J.; Kolios, A.J.; De Dominicis, M. CranSLIK v2. 0: Improving the stochastic prediction of oil spill transport and fate using approximation methods. Geosci. Model Dev. 2015, 8, 3365–3377. [Google Scholar] [CrossRef]
- Liubartseva, S.; De Dominicis, M.; Oddo, P.; Coppini, G.; Pinardi, N.; Greggio, N. Oil spill hazard from dispersal of oil along shipping lanes in the Southern Adriatic and Northern Ionian Seas. Mar. Pollut. Bull. 2015, 90, 259–272. [Google Scholar] [CrossRef] [PubMed]
- Liubartseva, S.; Smaoui, M.; Coppini, G.; Gonzalez, G.; Lecci, R.; Cretì, S.; Federico, I. Model-based reconstruction of the Ulysse-Virginia oil spill, October–November 2018. Mar. Pollut. Bull. 2020, 154, 111002. [Google Scholar] [CrossRef]
- Coppini, G.; Dominicis, M.D.; Lyubartsev, V.; Gonzalez, G. MOON Emergency Response Office: Support to REMPEC for the management of oil spill emergencies at sea by providing monitoring and forecasting system products. In Proceedings of the Quaderno ARPA per il Secondo convegno Nazionale di Oceanografia Operativa, Cesenatico, Italy, 27–28 May 2010. [Google Scholar]
- REMPEC. Regional Marine Pollution Emergency Response Centre for the Mediterranean Sea (REMPEC). Available online: https://www.rempec.org/en (accessed on 5 February 2021).
- GitHub. OpenDrift. Available online: https://github.com/OpenDrift/opendrift/ (accessed on 5 February 2021).
- Hole, L.R.; Dagestad, K.-F.; Röhrs, J.; Wettre, C.; Kourafalou, V.H.; Androulidakis, I.; Le Hénaff, M.; Kang, H.; Garcia-Pineda, O. Revisiting the DeepWater Horizon spill: High resolution model simulations of effects of oil droplet size distribution and river fronts. Ocean Sci. Discuss. 2018. [Google Scholar] [CrossRef]
- Hole, L.R.; Dagestad, K.-F.; Röhrs, J.; Wettre, C.; Kourafalou, V.H.; Androulidakis, Y.; Kang, H.; Le Hénaff, M.; Garcia-Pineda, O. The DeepWater Horizon Oil Slick: High Resolution Model Simulations of River Front Effects, Initialized and Verified by Satellite Observations. J. Mar. Sci. Eng. 2019, 7, 329. [Google Scholar] [CrossRef]
- Jones, C.E.; Dagestad, K.F.; Breivik, Ø.; Holt, B.; Röhrs, J.; Christensen, K.H.; Espeseth, M.; Brekke, C.; Skrunes, S. Measurement and modeling of oil slick transport. J. Geophys. Res. Ocean. 2016, 121, 7759–7775. [Google Scholar] [CrossRef]
- Zheng, L.; Yapa, P.D. Simulation of oil spills from underwater accidents II: Model verification. J. Hydraul. Res. 1998, 36, 117–134. [Google Scholar] [CrossRef]
- Malačič, V. Numerical modelling of the initial spread of sewage from diffusers in the Bay of Piran (northern Adriatic). Ecol. Model. 2001, 138, 173–191. [Google Scholar] [CrossRef]
- Alves, T.M.; Kokinou, E.; Zodiatis, G.; Lardner, R.; Panagiotakis, C.; Radhakrishnan, H. Modelling of oil spills in confined maritime basins: The case for early response in the Eastern Mediterranean Sea. Environ. Pollut. 2015, 206, 390–399. [Google Scholar] [CrossRef]
- Alves, T.M.; Kokinou, E.; Zodiatis, G.; Radhakrishnan, H.; Panagiotakis, C.; Lardner, R. Multidisciplinary oil spill modeling to protect coastal communities and the environment of the Eastern Mediterranean Sea. Sci. Rep. 2016, 6, 1–9. [Google Scholar] [CrossRef] [PubMed]
- Rezki, C.T.; Soesilo, T.E.B.; Herdiansyah, H.; Syahnoedi, U. Integrated Hydrodynamic and Oil Spill Modeling using OILMAP Software for Environment Protection of Oil Spill in Cilacap Regency. In E3S Web of Conferences; EDP Sciences: Les Ulis, France, 2018; p. 03028. [Google Scholar]
- Toz, A.C.; Buber, M. Performance evaluation of oil spill software systems in early fate and trajectory of oil spill: Comparison analysis of OILMAP and PISCES 2 in Mersin bay spill. Environ. Monit. Assess. 2018, 190, 551. [Google Scholar] [CrossRef]
- Toz, A.C. Modelling oil spill around Bay of Samsun, Turkey, with the use of OILMAP and ADIOS software systems. Pol. Marit. Res. 2017, 24, 115–125. [Google Scholar] [CrossRef]
- French-McCay, D.P.; Tajalli-Bakhsh, T.; Jayko, K.; Spaulding, M.L.; Li, Z. Validation of oil spill transport and fate modeling in Arctic ice. Arct. Sci. 2017, 4, 71–97. [Google Scholar] [CrossRef]
- Zhong, X.; Niu, H.; Wu, Y.; Hannah, C.; Li, S.; King, T. A modeling study on the oil spill of M/V Marathassa in Vancouver harbour. J. Mar. Sci. Eng. 2018, 6, 106. [Google Scholar] [CrossRef]
- Abascal, A.J.; Castanedo, S.; Medina, R.; Liste, M. Analysis of the reliability of a statistical oil spill response model. Mar. Pollut. Bull. 2010, 60, 2099–2110. [Google Scholar] [CrossRef]
- Bayramov, E.; Kada, M.; Buchroithner, M. Monitoring oil spill hotspots, contamination probability modelling and assessment of coastal impacts in the Caspian Sea using SENTINEL-1, LANDSAT-8, RADARSAT, ENVISAT and ERS satellite sensors. J. Oper. Oceanogr. 2018, 11, 27–43. [Google Scholar] [CrossRef]
- Nordam, T.; Beegle-Krause, C.J.; Skancke, J.; Nepstad, R.; Reed, M. Improving oil spill trajectory modelling in the Arctic. Mar. Pollut. Bull. 2019, 140, 65–74. [Google Scholar] [CrossRef] [PubMed]
- Ji, H.; Xu, M.; Huang, W.; Yang, K. The Influence of Oil leaking rate and Ocean Current Velocity on the Migration and Diffusion of Underwater Oil Spill. Sci. Rep. 2020, 10, 1–15. [Google Scholar] [CrossRef]
- Huang, J.C. A review of the state-of-the-art of oil spill fate/behavior models. In Proceedings of the International Oil Spill Conference, San Antonio, TX, USA, 28 February–3 March 1983; pp. 313–322. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Period | 7–700 tonnes | >700 tonnes |
|---|---|---|
| 1970–1979 | 543 | 245 |
| 1980–1989 | 360 | 94 |
| 1990–1999 | 281 | 77 |
| 2000–2009 | 149 | 32 |
| 2010–2019 | 45 | 18 |
| 2020 | 3 | 0 |
| Total | 1381 | 466 |
| CDOG | GNOME | OILMAPDEEP | SIMAP | OILMAP | TAMOC | OSCAR | MOTHY | OILTOX | POSEIDON-OSM | MEDSLIK | MEDSLIK-II | OILTRANS | OSERIT | MOHID | BLOSOM | OPENOIL | DELFT3D-PART | ||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| General features | Open-source code | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||||||
| Fate/weathering model | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ||
| Lagrangian model | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |
| Transport model | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ||
| Near field plume | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||||||
| Far field transition | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||||||
| Surface oil model | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ||||
| Blowout/buoyant plume model | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |||||||||||
| Back-tracking option | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |||||||||
| Stochastic component | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |||||
| Random walk scheme for diffusion | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ||||
| Oil database | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |||||||||||
| Bathymetric data | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ||
| Response support | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||
| Environmental impact | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||||||||
| Injury assessment | ✓ | ✓ | ✓ | ✓ | |||||||||||||||
| Research | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |||||||||||||
| Oil transport and weathering processes | Advection | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |
| Spreading | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ||
| Diffusion | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |
| Beaching | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |||||
| Natural dispersion and entrainment | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |||
| Evaporation | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |||
| Emulsification | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |||
| Dissolution | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||||||
| Sedimentation (OSA) | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |||||||||
| Biodegradation | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||||||||
| Wind drift | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |||
| Vertical turbulent mixing | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||
| Resurfacing | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||||||
| Stokes drift | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |||||||||
| Photo-oxidation | ✓ | ||||||||||||||||||
| MOTHY | POSEIDON-OSM | MEDSLIK | MEDSLIK-II | OPENOIL | |
|---|---|---|---|---|---|
| Number of oil types | 3 | No | 240 + API | 230 + API | 1000 |
| Number of parcels | 480 to 500,000 | 1000 to 500,000 | 10,000 to 500,000 | 10,000 to 500,000 | 100 to 500,000 |
| Connection to EMSA CSN | No | No | Yes (Manual) | Yes (Manual) | Yes |
| Oil Library/oil database | No database included/data on oil properties are required as input (e.g., oil density, viscosity) | No database included data on oil properties are required as input (e.g., oil density, viscosity) | Database from REMPEC (Oil spill type) | Database from REMPEC (Oil spill type) | NOAA’S Oil Library (Oil spill type) |
| Bathymetric data | Yes | Yes | Yes | Yes | Yes |
| Meteo data | ARPEGE ( Tair) | POSEIDON ETA , Tair) | Skiron Non- Hydrostatic (), ECMWF () | ECMWF () | ECMWF (, Tair) |
| Wave data | No | POSEIDON WAM Cycle 4 (HS, TW) | CYCOFOS WAM4(HS, TW) | No | CMEMS (HS, TW) |
| HD data | 3D u, v | POSEIDON (3D u, v, T, S) | CYCOFOS (3Du, v, T, S) | CMEMS, AFS (3D u, v, SST, S) | CMEMS (3D u, v, T, S) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Keramea, P.; Spanoudaki, K.; Zodiatis, G.; Gikas, G.; Sylaios, G. Oil Spill Modeling: A Critical Review on Current Trends, Perspectives, and Challenges. J. Mar. Sci. Eng. 2021, 9, 181. https://doi.org/10.3390/jmse9020181
Keramea P, Spanoudaki K, Zodiatis G, Gikas G, Sylaios G. Oil Spill Modeling: A Critical Review on Current Trends, Perspectives, and Challenges. Journal of Marine Science and Engineering. 2021; 9(2):181. https://doi.org/10.3390/jmse9020181
Chicago/Turabian StyleKeramea, Panagiota, Katerina Spanoudaki, George Zodiatis, Georgios Gikas, and Georgios Sylaios. 2021. "Oil Spill Modeling: A Critical Review on Current Trends, Perspectives, and Challenges" Journal of Marine Science and Engineering 9, no. 2: 181. https://doi.org/10.3390/jmse9020181
APA StyleKeramea, P., Spanoudaki, K., Zodiatis, G., Gikas, G., & Sylaios, G. (2021). Oil Spill Modeling: A Critical Review on Current Trends, Perspectives, and Challenges. Journal of Marine Science and Engineering, 9(2), 181. https://doi.org/10.3390/jmse9020181