Sparse Bayesian Learning Based Direction-of-Arrival Estimation under Spatially Colored Noise Using Acoustic Hydrophone Arrays

 , and
, and
Abstract
1. Introduction
2. Problem Description
2.1. Signal Model
2.2. Noise Model
3. Proposed Technique
3.1. Time Domain Fitting of Finite Bandwidth Signals with Prolate Spheroidal Wave Functions
- (1)
- are smooth, real, and form a spatially normalized orthogonal basis of , i.e.
- (2)
- are real numbers that are positive and can be ordered by the magnitude of their values as
- (3)
- When i is an odd number, is an odd function with respect to t; when i is an even number, is a even function with respect to t.
3.2. Establish Spatially Colored Noise Model Using Prolate Spheroidal Wave Functions
3.3. Sparse Bayesian Learning Based DOA Estimation under Spatially Colored Noise
- (1)
- Initialize the hyperparameter vector and the directional noise weight coefficients vector .
- (2)
- Repeat the following two steps until iteration termination conditions are satisfied:
- Estimate spatial power spectrum by updating , according to Equations (35)–(37);
- Fit the noise according to Equation (34) and estimate the noise parameter
| Algorithm 1 Procedure of the proposed algorithm |
| Initialization: , |
| Repeat: (1) Calculate and according to Equation (36)–(37). |
| (2) Update parameter according to Equations (35)–(37); |
| (3) Fit the noise according to Equation (34) and estimate the noise parameter ; (4) Repeat Steps (1), (2) and (3) steps until and converge to a fixed value. If convergent, terminate the iteration and break; otherwise, return to first step; End. |
3.4. Complexity Analysis
4. Property Analysis
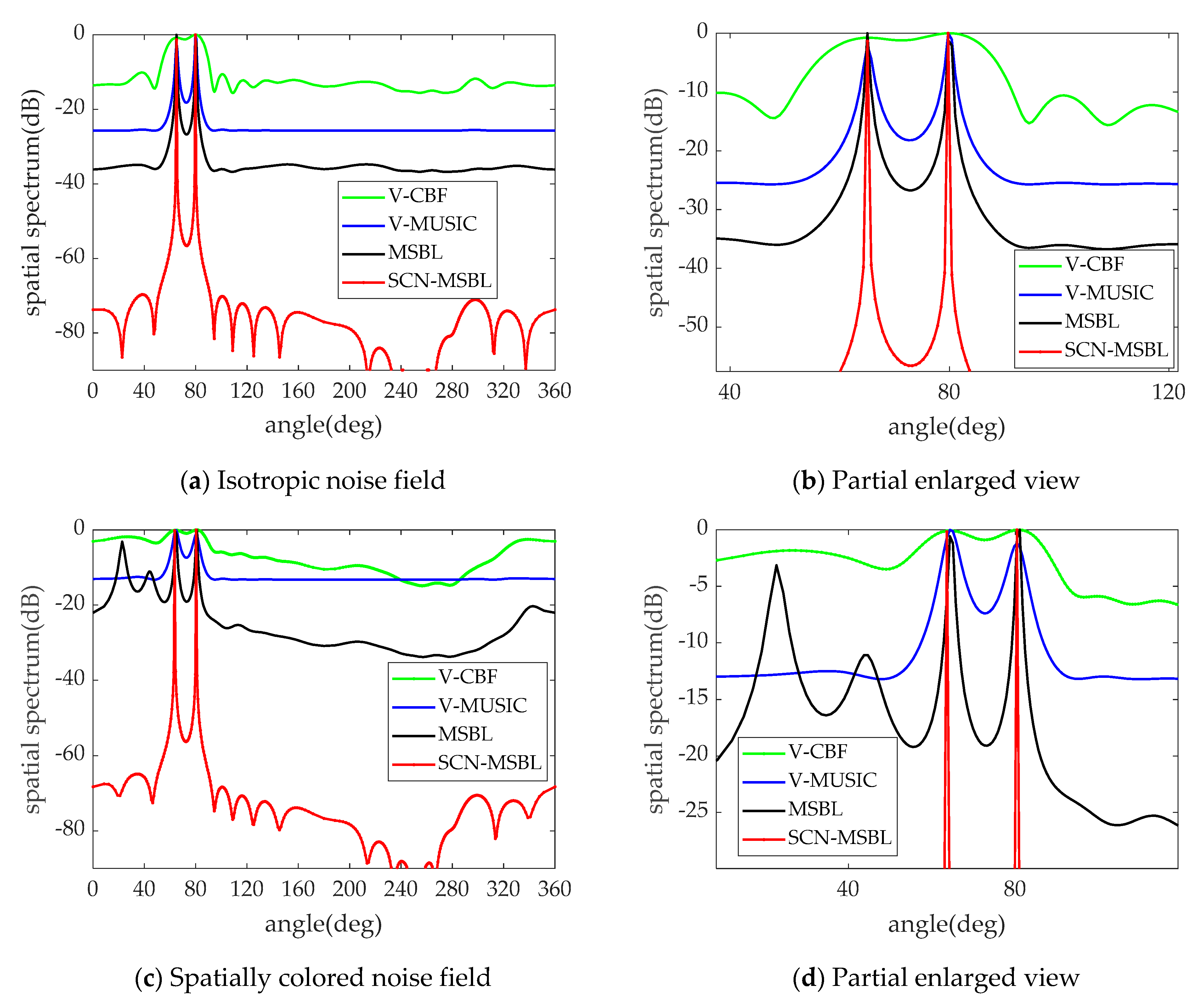
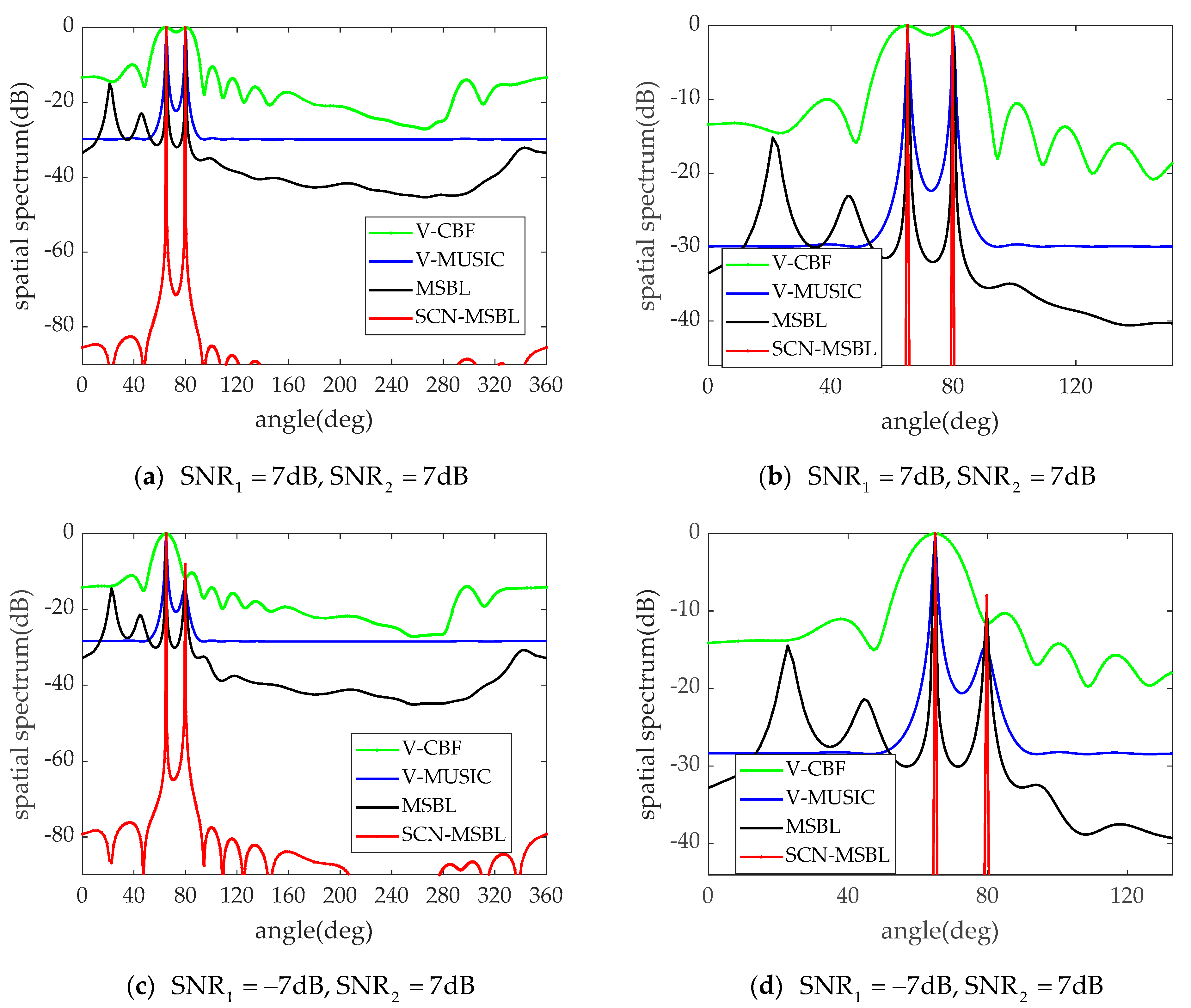
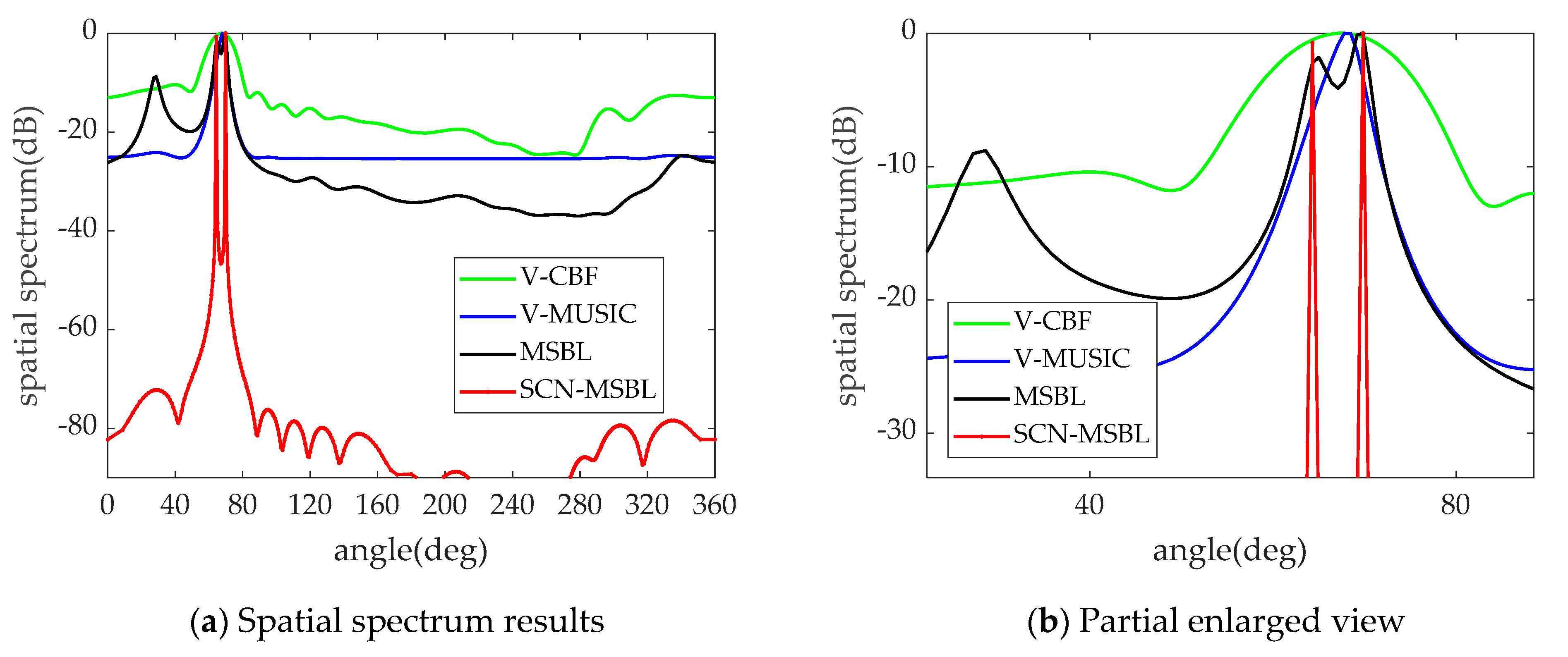
4.1. Simulation Results of Spatial Spectrum Estimates
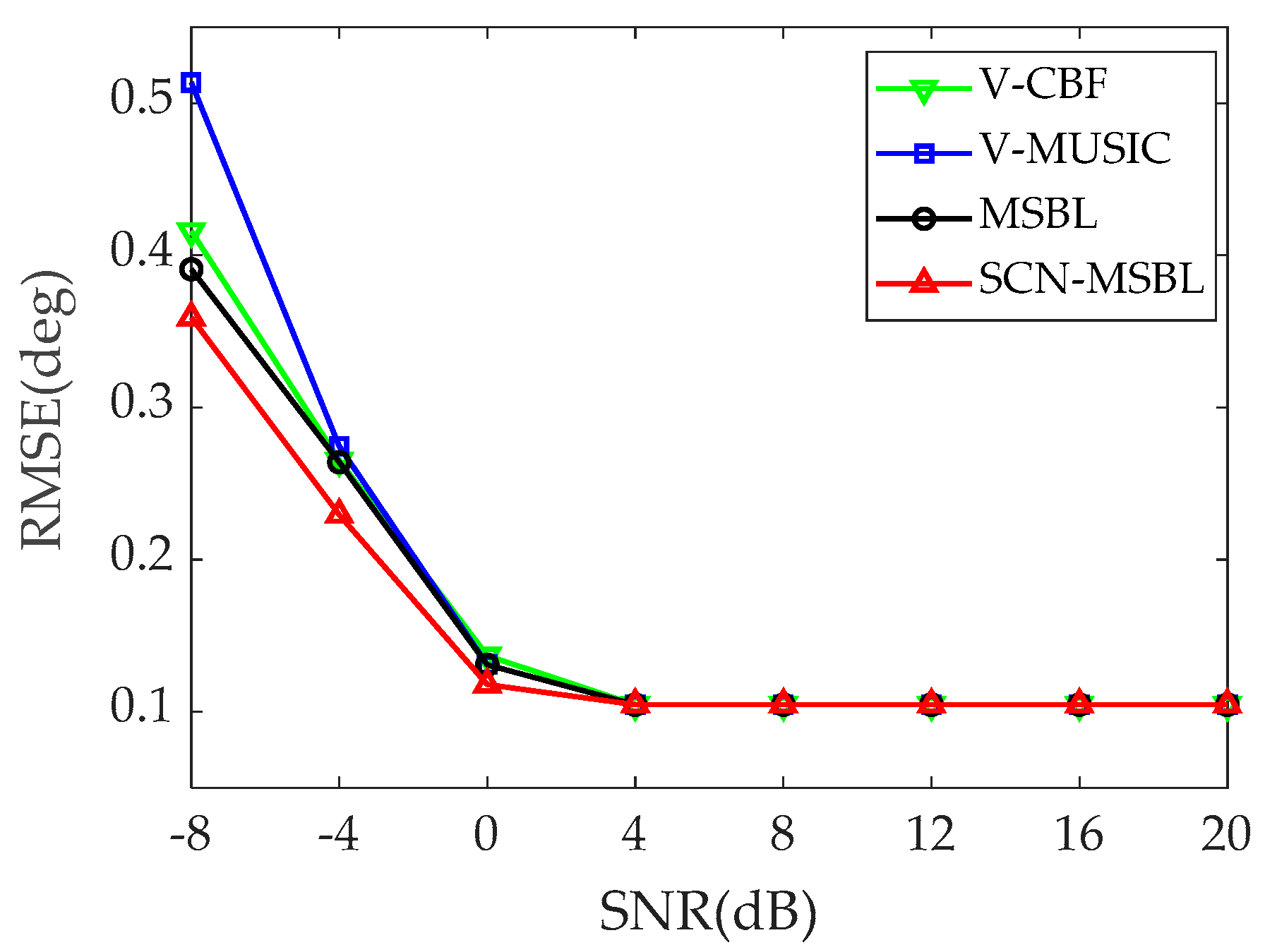
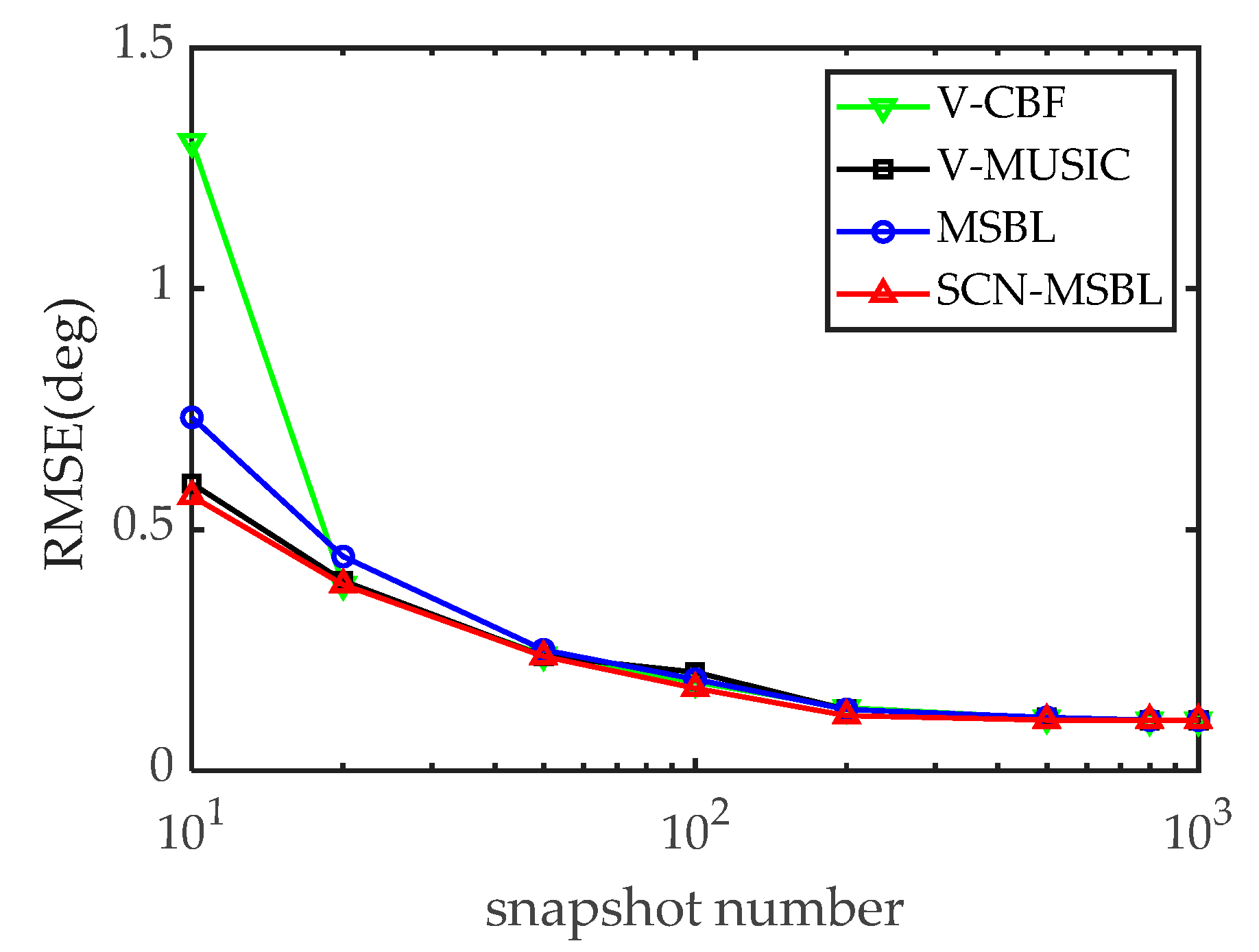
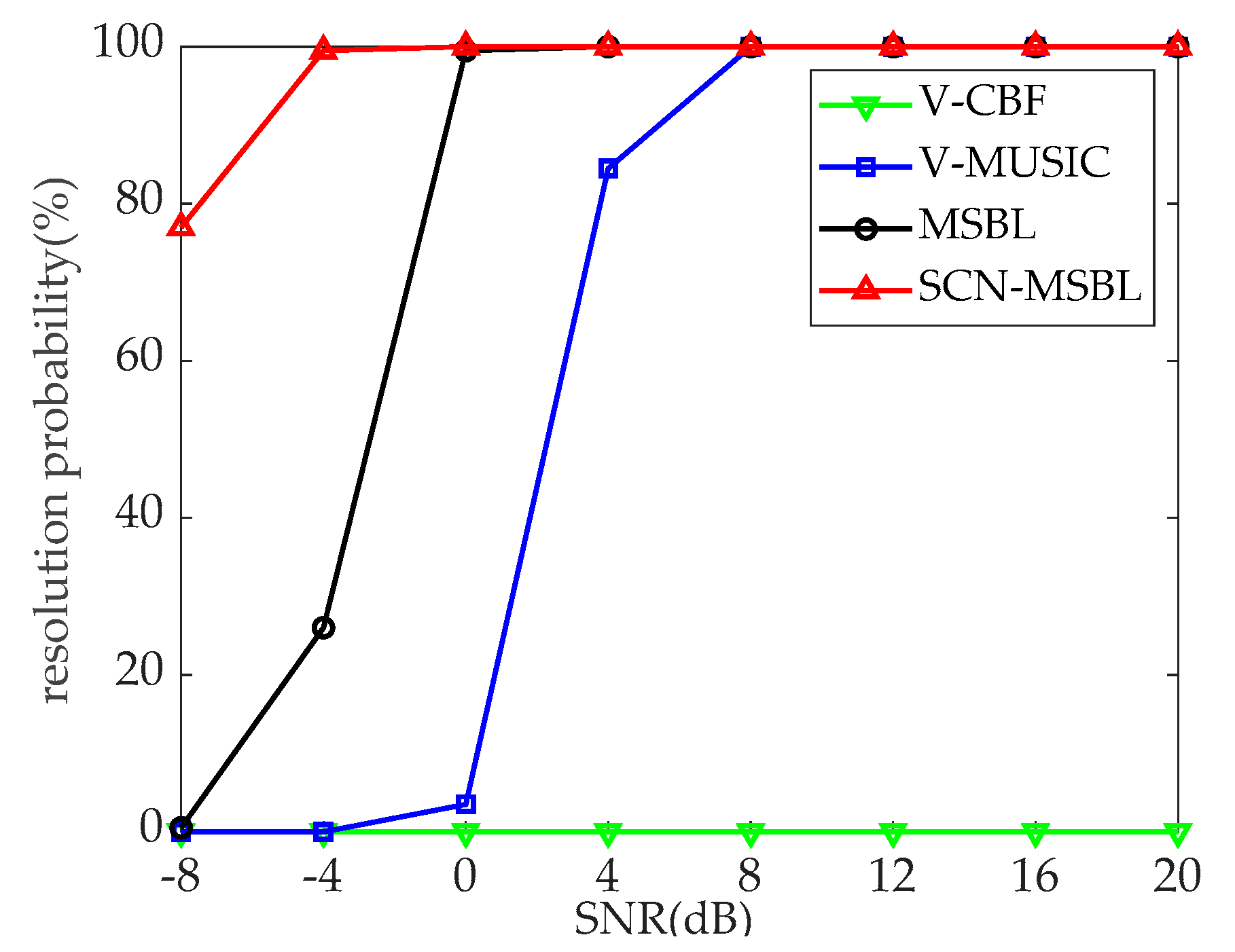
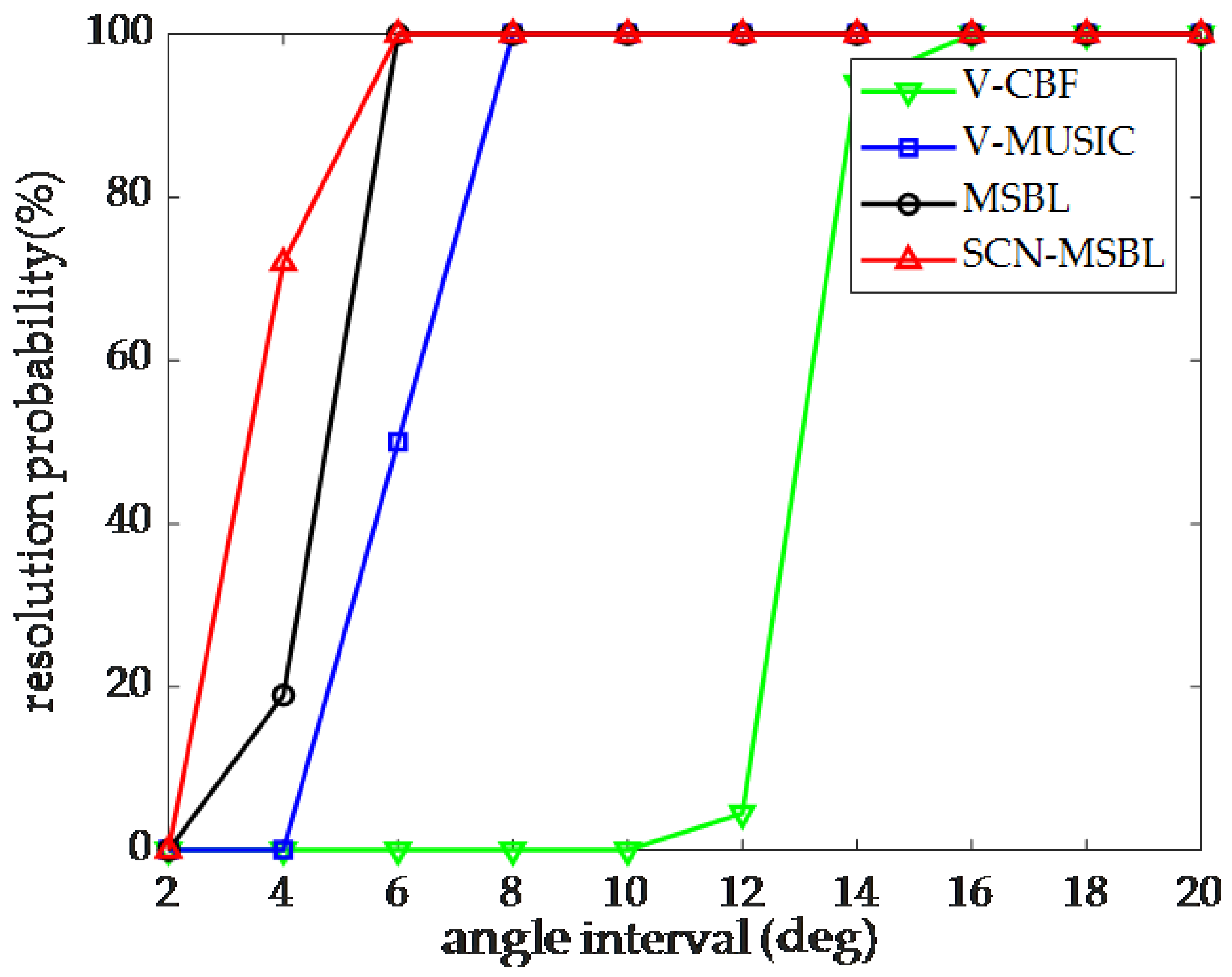
4.2. Statistical Performance Analysis of Simulation Results
5. Conclusions
- (1)
- When the spatial noise is highly directional, the proposed algorithms effectively suppress the significant increase in pseudo-peaks and noise spectral levels, while ensuring the high resolution of the sparse reconstruction class algorithm.
- (2)
- The proposed algorithms require lower SNR thresholds and angle interval thresholds to successfully distinguish adjacent targets, compared to beamforming algorithms and subspace-like algorithms.
- (3)
- As for the accuracy of the DOA estimation, the RMSE of the DOA estimation of the SCN-MSBL algorithm is slightly smaller than that of the V-MUSIC algorithm, and comparable to that of the MSBL algorithm, provided that all methods can accurately distinguish the adjacent targets.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Shi, Z.; Liang, G.; Qiu, L.; Wan, G.; Zhao, L. Vector Hydrophone Array Design Based on Off-Grid Compressed Sensing. Sensors 2020, 20, 6949. [Google Scholar] [CrossRef]
- Nehorai, A.; Paldi, E. Acoustic vector-sensor array processing. IEEE Trans. Signal Process. 1994, 42, 2481–2491. [Google Scholar] [CrossRef]
- Chen, H.-W.; Zhao, J.-W. Wideband MVDR beamforming for acoustic vector sensor linear array. IEEE Proc. Radar. Sonar Navig. 2004, 151, 158. [Google Scholar] [CrossRef]
- Wong, K.; Zoltowski, M. ESPRIT-based extended-aperture source localization using velocity-hydrophones. In OCEANS 96 MTS/IEEE Conference, Proceedings of the Coastal Ocean Prospects for the 21st Century, Fort Lauderdale, FL, USA, 23–26 September 1996; IEEE: Piscataway, NJ, USA, 2002; Volume 3, pp. 1427–1432. [Google Scholar]
- Wong, K.; Zoltowski, M. Extended-aperture underwater acoustic multisource azimuth/elevation direction-finding using uniformly but sparsely spaced vector hydrophones. IEEE J. Ocean. Eng. 1997, 22, 659–672. [Google Scholar] [CrossRef]
- Wong, K.T.; Zoltowski, M.D. Polarization-beamspace self-initiating MUSIC for azimuth/elevation angle estimation. In Proceedings of the Radar Systems (RADAR 97), Edinburgh, UK, 14–16 October 1997; pp. 328–333. [Google Scholar]
- Hamson, R. The modelling of ambient noise due to shipping and wind sources in complex environments. Appl. Acoust. 1997, 51, 251–287. [Google Scholar] [CrossRef]
- Sabra, K.; Roux, P.; Thode, A.; D’Spain, G.; Hodgkiss, W.; Kuperman, W. Using Ocean Ambient Noise for Array Self-Localization and Self-Synchronization. IEEE J. Ocean. Eng. 2005, 30, 338–347. [Google Scholar] [CrossRef]
- Shi, Y.; Yang, Y.; Tian, J.; Sun, C.; Zhao, W.; Li, Z.; Ma, Y. Long-term ambient noise statistics in the northeast South China Sea. J. Acoust. Soc. Am. 2019, 145, EL501–EL507. [Google Scholar] [CrossRef]
- Huang, Y.; Guo, J. Spatial correlation of the acoustic vector field of the surface noise in three-dimensional ocean environments. J. Acoust. Soc. Am. 2014, 135, 2397. [Google Scholar] [CrossRef]
- Cron, B.F.; Sherman, C.H. Spatial-Correlation Functions for Various Noise Models. J. Acoust. Soc. Am. 1962, 34, 1732–1736. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, Y.; He, Z.; Ma, Y.; Li, B. Robust Superdirective Frequency-Invariant Beamforming for Circular Sensor Arrays. IEEE Signal Process. Lett. 2017, 24, 1193–1197. [Google Scholar] [CrossRef]
- Shchurov, V.A. Coherent and diffusive fields of underwater acoustic ambient noise. J. Acoust. Soc. Am. 1991, 90, 991–1001. [Google Scholar] [CrossRef]
- Hawkes, M.; Nehorai, A. Acoustic vector-sensor correlations in ambient noise. IEEE J. Ocean. Eng. 2001, 26, 337–347. [Google Scholar] [CrossRef]
- Viberg, M. Sensitivity of parametric direction finding to colored noise fields and undermodeling. Signal Process. 1993, 34, 207–222. [Google Scholar] [CrossRef]
- Li, M.; Lu, Y. Dimension reduction for array processing with robust interference cancellation. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 103–112. [Google Scholar] [CrossRef]
- Meng, Z.; Shen, F.; Zhou, W. Adaptive beamforming using the cyclostationarity of the source signals. Electron. Lett. 2017, 53, 858–860. [Google Scholar] [CrossRef]
- Meng, Z.; Shen, F.; Zhou, W. Iterative adaptive approach to interference covariance matrix reconstruction for robust adaptive beamforming. IET Microwaves Antennas Propag. 2018, 12, 1704–1708. [Google Scholar] [CrossRef]
- Meng, Z.; Zhou, W. Robust adaptive beamforming using iterative adaptive approach. J. Electromagn. Waves Appl. 2018, 33, 504–519. [Google Scholar] [CrossRef]
- Meng, Z.; Zhou, W. Direction-of-Arrival Estimation in Coprime Array Using the ESPRIT-Based Method. Sensors 2019, 19, 707. [Google Scholar] [CrossRef]
- Sun, S.; Zhang, X.; Zheng, C.; Fu, J.; Zhao, C. Underwater Acoustical Localization of the Black Box Utilizing Single Autonomous Underwater Vehicle Based on the Second-Order Time Difference of Arrival. IEEE J. Ocean. Eng. 2020, 45, 1268–1279. [Google Scholar] [CrossRef]
- Sun, S.; Qin, S.; Hao, Y.; Zhang, G.; Zhao, C. Underwater Acoustic Localization of the Black Box Based on Generalized Second-Order Time Difference of Arrival (GSTDOA). IEEE Trans. Geosci. Remote. Sens. 2020, 1–11. [Google Scholar] [CrossRef]
- Xie, J.; Yuan, Y.; Liu, Y. Super-resolution processing for HF surface wave radar based on pre-whitened MUSIC. IEEE J. Ocean. Eng. 1998, 23, 313–321. [Google Scholar] [CrossRef]
- Wu, Y.; Hou, C.; Liao, G.; Guo, Q. Direction-of-Arrival Estimation in the Presence of Unknown Nonuniform Noise Fields. IEEE J. Ocean. Eng. 2006, 31, 504–510. [Google Scholar] [CrossRef]
- Le Cadre, J. Parametric methods for spatial signal processing in the presence of unknown colored noise fields. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 965–983. [Google Scholar] [CrossRef]
- Tewfik, A. Direction finding in the presence of colored noise by candidate identification. IEEE Trans. Signal Process. 1991, 39, 1933–1942. [Google Scholar] [CrossRef]
- Ye, H.; DeGroat, D. Maximum likelihood DOA estimation and asymptotic Cramer-Rao bounds for additive unknown colored noise. IEEE Trans. Signal Process. 1995, 43, 938–949. [Google Scholar] [CrossRef]
- Nagesha, V.; Kay, S. Maximum likelihood estimation for array processing in colored noise. IEEE Trans. Signal Process. 1996, 44, 169–180. [Google Scholar] [CrossRef]
- Tugnait, J. Time delay estimation with unknown spatially correlated Gaussian noise. IEEE Trans. Signal Process. 1993, 41, 549–558. [Google Scholar] [CrossRef]
- Cardoso, J.-F.; Moulines, E. Asymptotic performance analysis of direction-finding algorithms based on fourth-order cumulants. IEEE Trans. Signal Process. 1995, 43, 214–224. [Google Scholar] [CrossRef]
- Paulraj, A.; Kailath, T. Eigenstructure methods for direction of arrival estimation in the presence of unknown noise fields. IEEE Trans. Acoust. Speech Signal Process. 1986, 34, 13–20. [Google Scholar] [CrossRef]
- Jin, M.; Liao, G.; Li, J. Joint DOD and DOA estimation for bistatic MIMO radar. Signal Process. 2009, 89, 244–251. [Google Scholar] [CrossRef]
- Chen, J.; Gu, H.; Su, W. A new method for joint DOD and DOA estimation in bistatic MIMO radar. Signal Process. 2010, 90, 714–718. [Google Scholar] [CrossRef]
- Wen, F.; Xiong, X.; Su, J.; Zhang, Z. Angle estimation for bistatic MIMO radar in the presence of spatial colored noise. Signal Process. 2017, 134, 261–267. [Google Scholar] [CrossRef]
- Wen, F.; Zhang, Z.; Zhang, G. Joint DOD and DOA Estimation for Bistatic MIMO Radar: A Covariance Trilinear Decomposition Perspective. IEEE Access 2019, 7, 53273–53283. [Google Scholar] [CrossRef]
- Hong, S.; Wan, X.; Cheng, F.; Ke, H. Covariance differencing-based matrix decomposition for coherent sources localisation in bi-static multiple-input-multiple-output radar. IET Radar Sonar Navig. 2015, 9, 540–549. [Google Scholar] [CrossRef]
- He, J.; Liu, Z. Two-dimensional direction finding of acoustic sources by a vector sensor array using the propagator method. Signal Process. 2008, 88, 2492–2499. [Google Scholar] [CrossRef]
- Qiu, L.; Lan, T.; Wang, Y. A Sparse Perspective for Direction-of-Arrival Estimation Under Strong Near-Field Interference Environment. Sensors 2019, 20, 163. [Google Scholar] [CrossRef]
- Wang, L.; Zhao, L.; Bi, G.; Wan, C.; Zhang, L.; Zhang, H. Novel Wideband DOA Estimation Based on Sparse Bayesian Learning with Dirichlet Process Priors. IEEE Trans. Signal Process. 2015, 64, 275–289. [Google Scholar] [CrossRef]
- Yang, Z.; Xie, L.; Zhang, C. Off-Grid Direction of Arrival Estimation Using Sparse Bayesian Inference. IEEE Trans. Signal Process. 2013, 61, 38–43. [Google Scholar] [CrossRef]
- Liu, H.; Zhao, L.; Li, Y.; Jing, X.; Truong, T.-K. A Sparse-Based Approach for DOA Estimation and Array Calibration in Uniform Linear Array. IEEE Sens. J. 2016, 16, 6018–6027. [Google Scholar] [CrossRef]
- Xu, X.; Wei, X.; Ye, Z. DOA Estimation Based on Sparse Signal Recovery Utilizing Weighted l1-Norm Penalty. IEEE Signal Process. Lett. 2012, 19, 155–158. [Google Scholar] [CrossRef]
- Zhang, Z.; Rao, B.D. Sparse Signal Recovery with Temporally Correlated Source Vectors Using Sparse Bayesian Learning. IEEE J. Sel. Top. Signal Process. 2011, 5, 912–926. [Google Scholar] [CrossRef]
- Malioutov, D.; Cetin, M.; Willsky, A. A sparse signal reconstruction perspective for source localization with sensor arrays. IEEE Trans. Signal Process. 2005, 53, 3010–3022. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, X.; Xie, J.; Wanga, L.; Ng, B.W.-H. Sparsity-Inducing DOA Estimation of Coherent Signals Under the Coexistence of Mutual Coupling and Nonuniform Noise. IEEE Access 2019, 7, 40271–40278. [Google Scholar] [CrossRef]
- Hu, N.; Sun, B.; Zhang, Y.; Dai, J.; Wang, J.; Chang, C. Underdetermined DOA Estimation Method for Wideband Signals Using Joint Nonnegative Sparse Bayesian Learning. IEEE Signal Process. Lett. 2017, 24, 535–539. [Google Scholar] [CrossRef]
- Friedlander, B.; Weiss, A. Direction finding using noise covariance modeling. IEEE Trans. Signal Process. 1995, 43, 1557–1567. [Google Scholar] [CrossRef]
- Landau, H.J.; Pollak, H.O. Prolate spheroidal wave functions, Fourier analysis and uncertainty principle II. Bell System Tech. J. 1961, 40, 65–84. [Google Scholar] [CrossRef]
- Slepian, D.; Pollak, H.O. Prolate Spheroidal Wave Functions, Fourier Analysis and Uncertainty I. Bell Syst. Tech. J. 1961, 40, 43–63. [Google Scholar] [CrossRef]
- Xiao, H.; Rokhlin, V.; Yarvin, N. Prolate spheroidal wavefunctions, quadrature and interpolation. Inverse Probl. 2001, 17, 805–838. [Google Scholar] [CrossRef]
- Chen, C.-Y.; Vaidyanathan, P.P. MIMO Radar Space–Time Adaptive Processing Using Prolate Spheroidal Wave Functions. IEEE Trans. Signal Process. 2008, 56, 623–635. [Google Scholar] [CrossRef]
- Slepian, D. Prolate Spheroidal Wave Functions, Fourier Analysis, and Uncertainty-V: The Discrete Case. Bell Syst. Tech. J. 1978, 57, 1371–1430. [Google Scholar] [CrossRef]
- Scheinman, A.H. A Method for Simplifying Boolean Functions. Bell Syst. Tech. J. 1962, 41, 1337–1346. [Google Scholar] [CrossRef]
- Gosse, L. Effective band-limited extrapolation relying on Slepian series and ℓ1 regularization. Comput. Math. Appl. 2010, 60, 1259–1279. [Google Scholar] [CrossRef]
- Shkolnisky, Y.; Tygert, M.; Rokhlin, V. Approximation of bandlimited functions. Appl. Comput. Harmon. Anal. 2006, 21, 413–420. [Google Scholar] [CrossRef][Green Version]
- Wang, L.-L. Analysis of spectral approximations using prolate spheroidal wave functions. Math. Comput. 2009, 79, 807–827. [Google Scholar] [CrossRef]
- Walden, A.T. Spectral Analysis for Physical Applications; Cambridge University Press: Cambridge, UK, 1993. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Approach | Advantages | Disadvantages |
|---|---|---|
| V-CBF | Noise robustness | Poor resolution |
| Faster and low complexity | Not suitable for spatially colored noise | |
| V-MUSIC | Ability to super-resolve | Not suitable for spatially colored noise |
| MSBL | Higher resolution capability | High computational cost |
| Higher estimation accuracy | Results are prior dependent which is needed to select | |
| Not suitable for spatially colored noise | ||
| SCN-MSBL | Higher resolution capability | High computational cost |
| Higher estimation accuracy | Results are prior dependent which is needed to select | |
| Suitable for spatially colored noise |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, G.; Shi, Z.; Qiu, L.; Sun, S.; Lan, T. Sparse Bayesian Learning Based Direction-of-Arrival Estimation under Spatially Colored Noise Using Acoustic Hydrophone Arrays. J. Mar. Sci. Eng. 2021, 9, 127. https://doi.org/10.3390/jmse9020127
Liang G, Shi Z, Qiu L, Sun S, Lan T. Sparse Bayesian Learning Based Direction-of-Arrival Estimation under Spatially Colored Noise Using Acoustic Hydrophone Arrays. Journal of Marine Science and Engineering. 2021; 9(2):127. https://doi.org/10.3390/jmse9020127
Chicago/Turabian StyleLiang, Guolong, Zhibo Shi, Longhao Qiu, Sibo Sun, and Tian Lan. 2021. "Sparse Bayesian Learning Based Direction-of-Arrival Estimation under Spatially Colored Noise Using Acoustic Hydrophone Arrays" Journal of Marine Science and Engineering 9, no. 2: 127. https://doi.org/10.3390/jmse9020127
APA StyleLiang, G., Shi, Z., Qiu, L., Sun, S., & Lan, T. (2021). Sparse Bayesian Learning Based Direction-of-Arrival Estimation under Spatially Colored Noise Using Acoustic Hydrophone Arrays. Journal of Marine Science and Engineering, 9(2), 127. https://doi.org/10.3390/jmse9020127