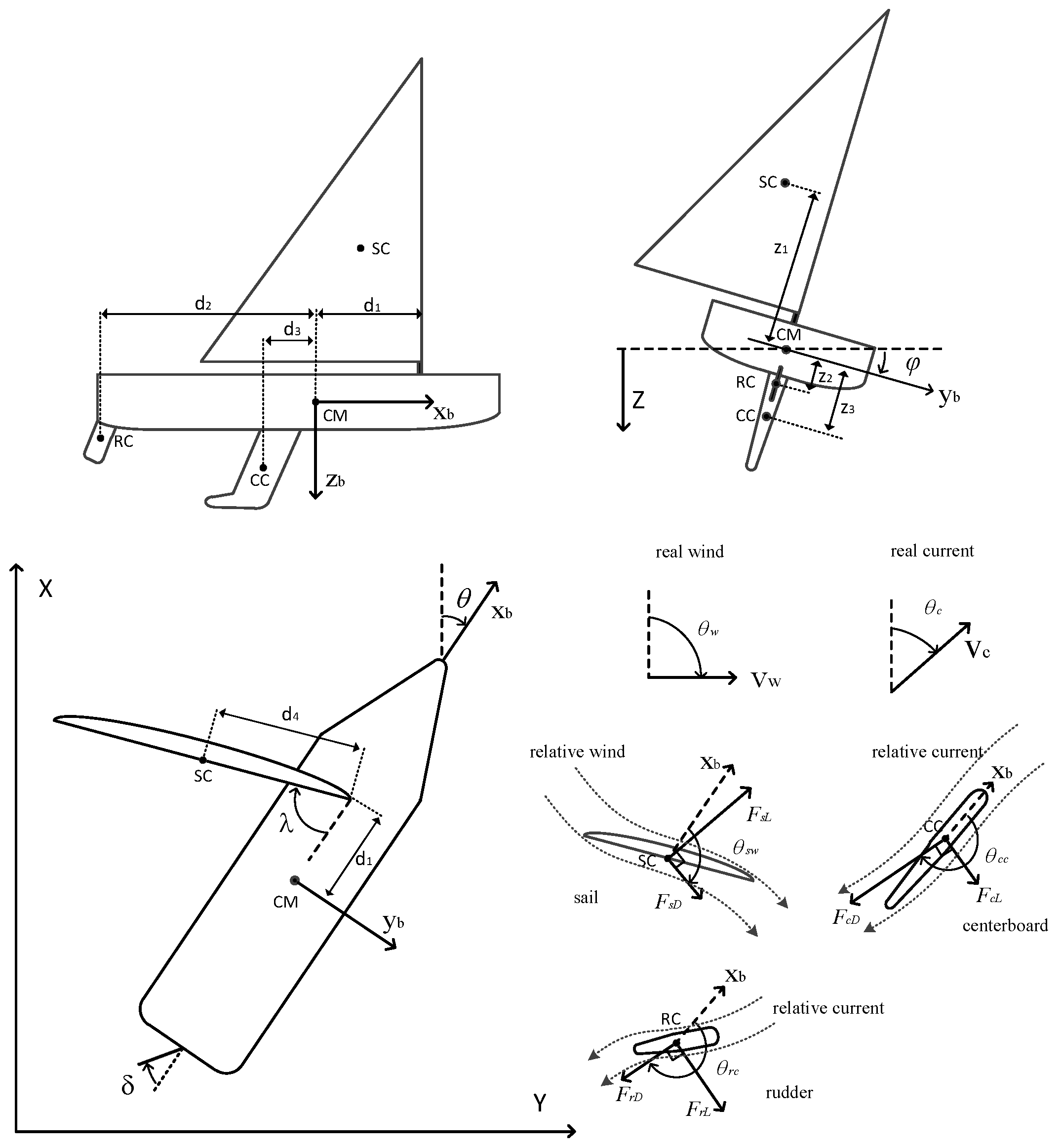
Figure 1.
Variables and schematics of sailboat model.
Figure 1.
Variables and schematics of sailboat model.
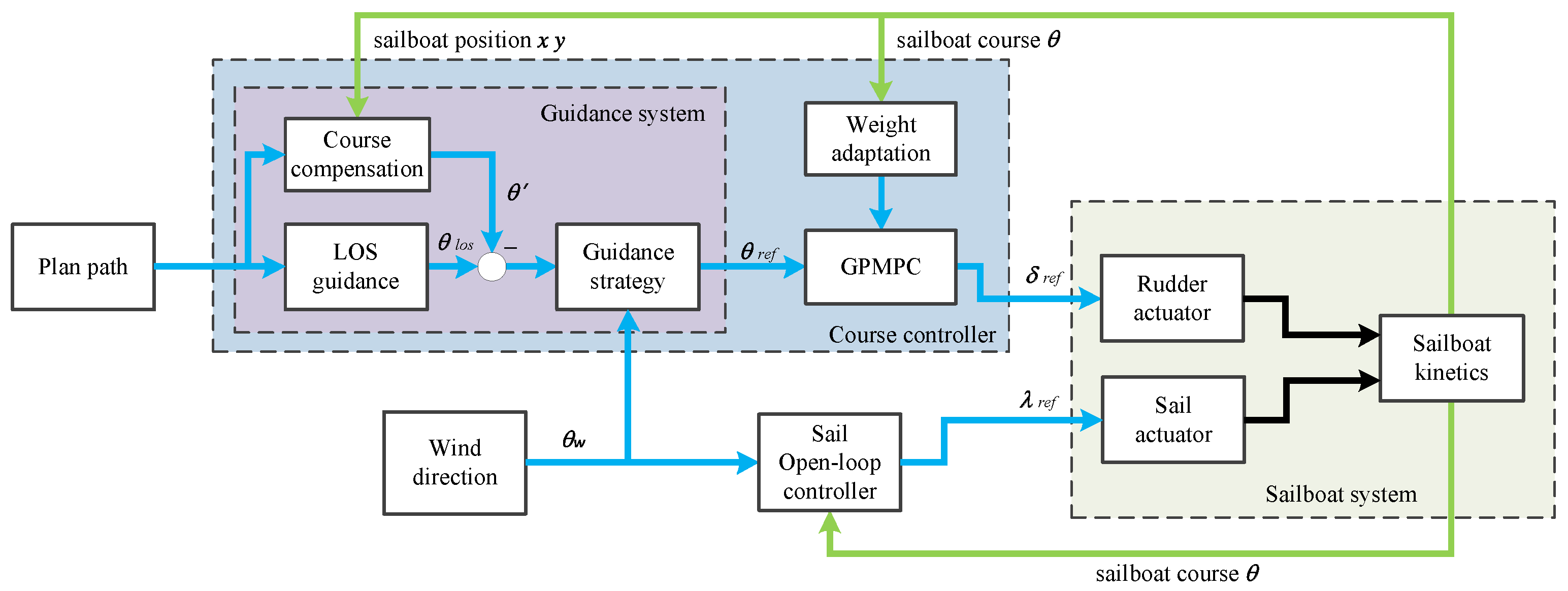
Figure 2.
The control architecture of the sailboat. It includes the sailboat system on the right side, the course control system on the upper side, and the speed controller on the lower side.
Figure 2.
The control architecture of the sailboat. It includes the sailboat system on the right side, the course control system on the upper side, and the speed controller on the lower side.
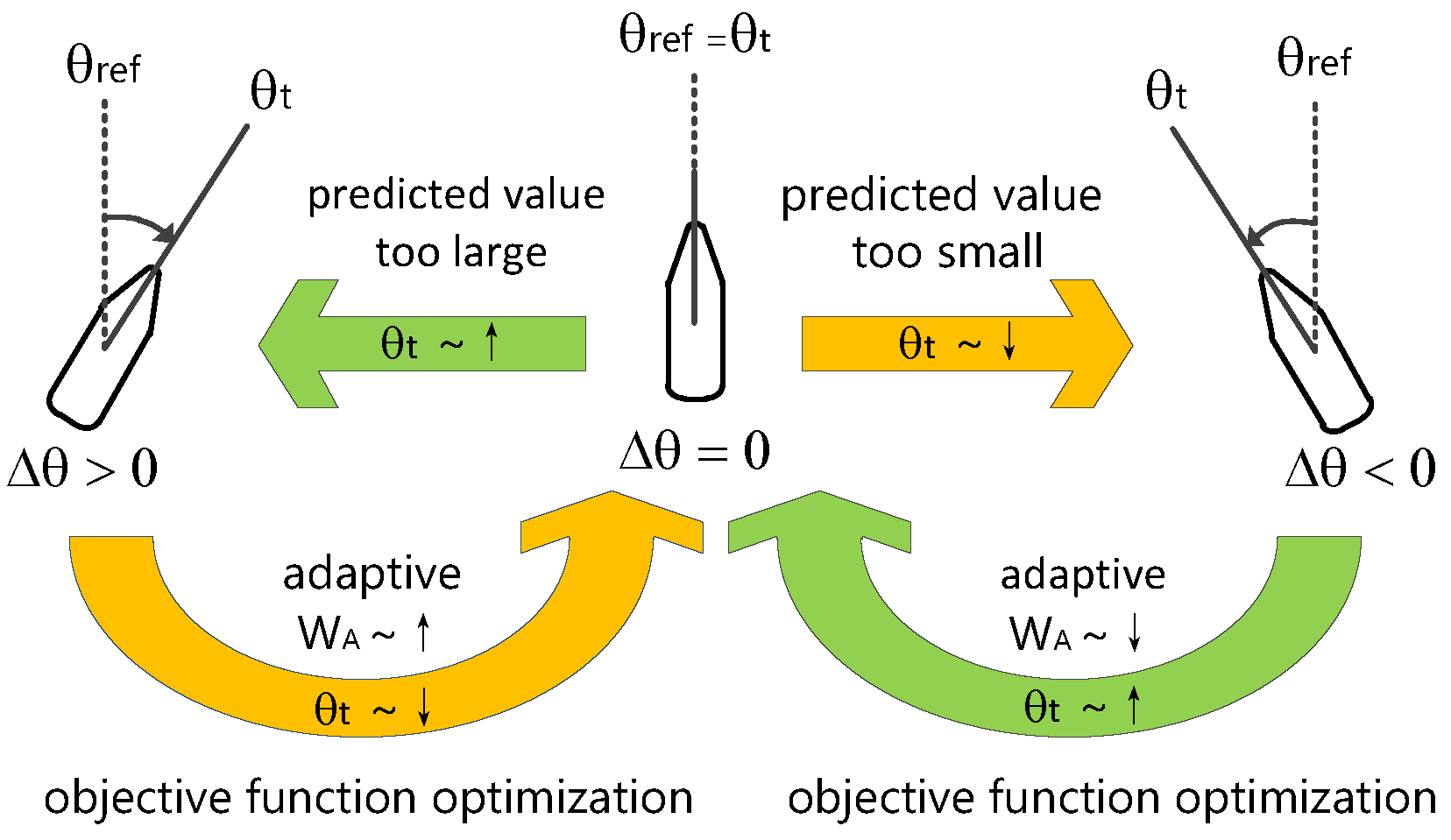
Figure 3.
The effect of weight adaptation term in the control process.
Figure 3.
The effect of weight adaptation term in the control process.
Figure 4.
The relationship between the windward angle and maximum forward speed of a sailboat.
Figure 4.
The relationship between the windward angle and maximum forward speed of a sailboat.
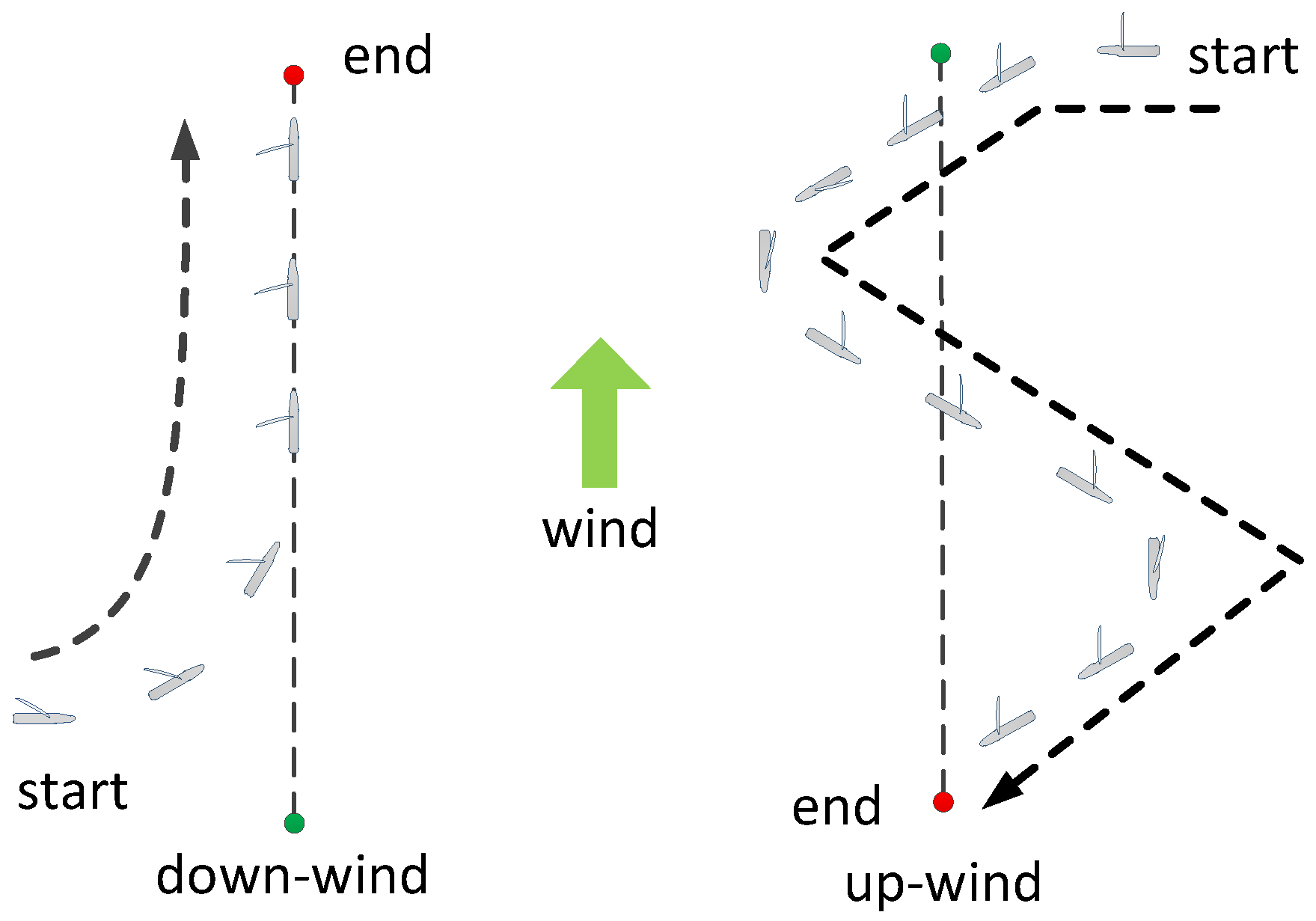
Figure 5.
Sailing in up-wind and down-wind.
Figure 5.
Sailing in up-wind and down-wind.
Figure 6.
Guidance strategy flow chart.
Figure 6.
Guidance strategy flow chart.
Figure 7.
Line-of-sight guidance.
Figure 7.
Line-of-sight guidance.
Figure 8.
Schematic diagram of heading deviation and the compensation.
Figure 8.
Schematic diagram of heading deviation and the compensation.
Figure 9.
Effect of course compensation.
Figure 9.
Effect of course compensation.
Figure 10.
The navigation data used for learning the Gaussian model. The navigation sampling data of the solid blue trajectory in the figure is used as the learning data of the Gaussian model. The navigation sampling data of the orange dashed line is used as test data to verify the accuracy of the Gaussian model.
Figure 10.
The navigation data used for learning the Gaussian model. The navigation sampling data of the solid blue trajectory in the figure is used as the learning data of the Gaussian model. The navigation sampling data of the orange dashed line is used as test data to verify the accuracy of the Gaussian model.
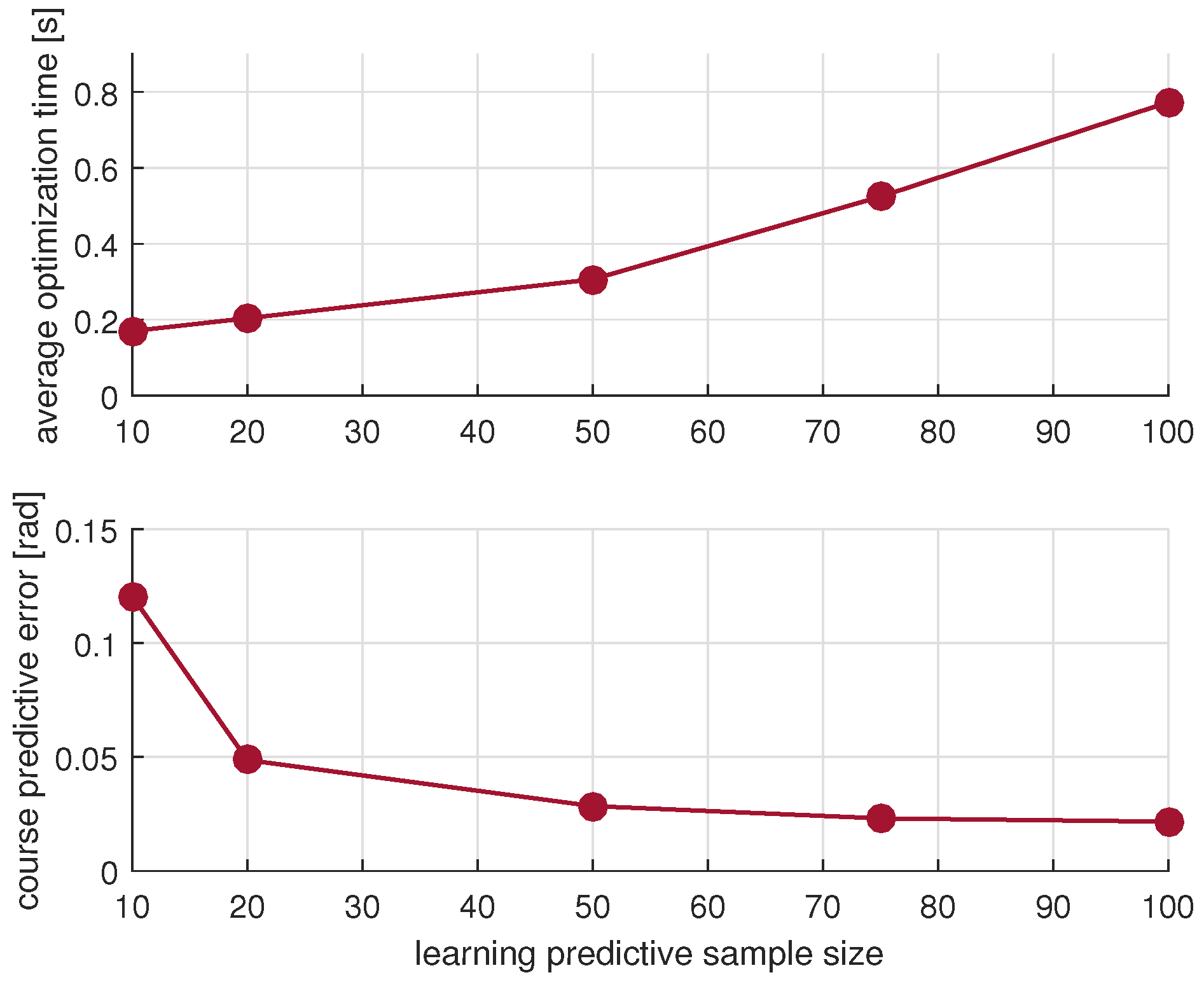
Figure 11.
The effect of learning sample size in Gaussian model on prediction accuracy and optimization time.
Figure 11.
The effect of learning sample size in Gaussian model on prediction accuracy and optimization time.
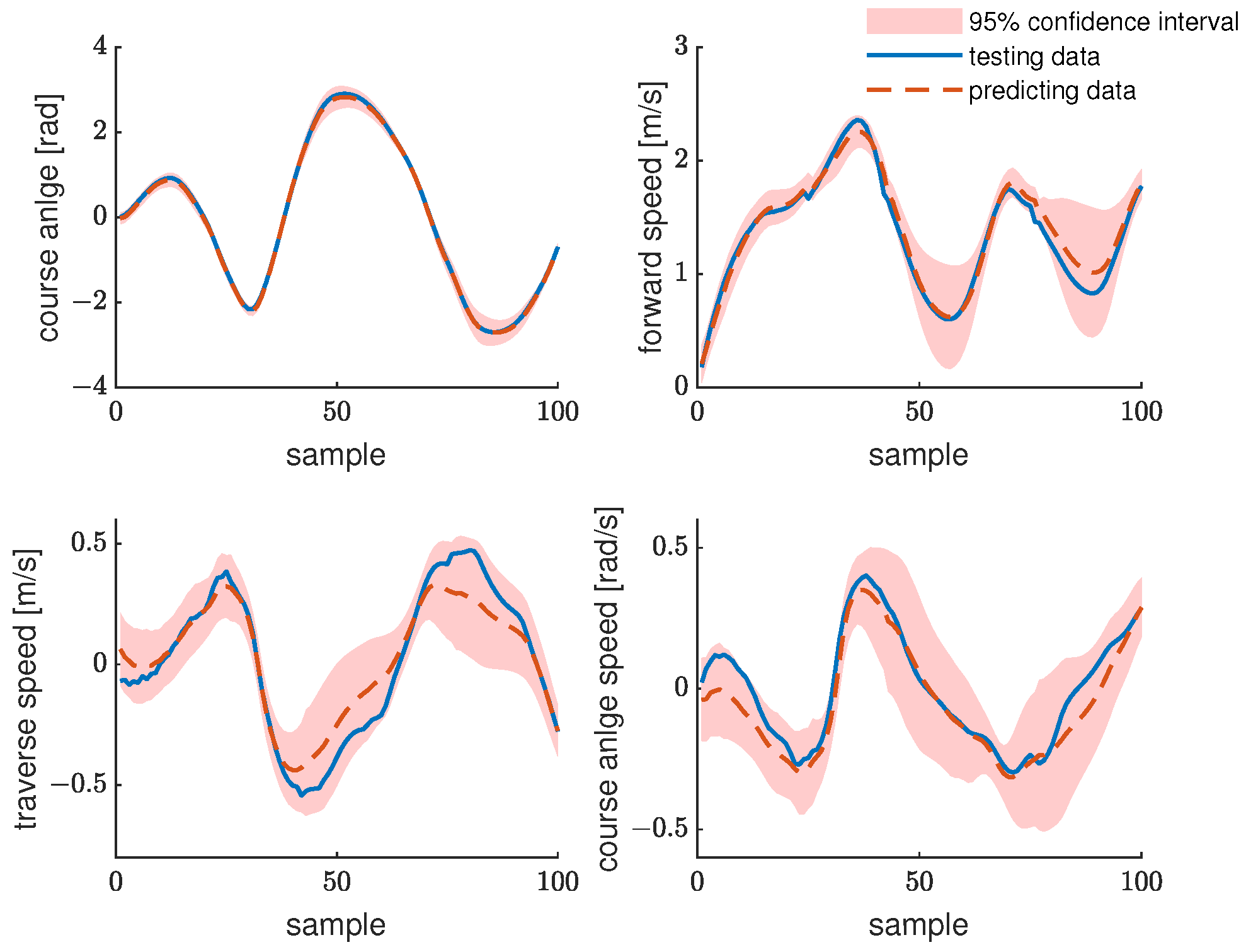
Figure 12.
Results of Gaussian model predictions. Prediction results for heading, forward speed, lateral speed, and yaw angle speed for the test data in the case of 50 learning samples. The solid blue line in the figure shows the actual data, the dashed orange line shows prediction results, and the red area shows the 95% confidence interval.
Figure 12.
Results of Gaussian model predictions. Prediction results for heading, forward speed, lateral speed, and yaw angle speed for the test data in the case of 50 learning samples. The solid blue line in the figure shows the actual data, the dashed orange line shows prediction results, and the red area shows the 95% confidence interval.
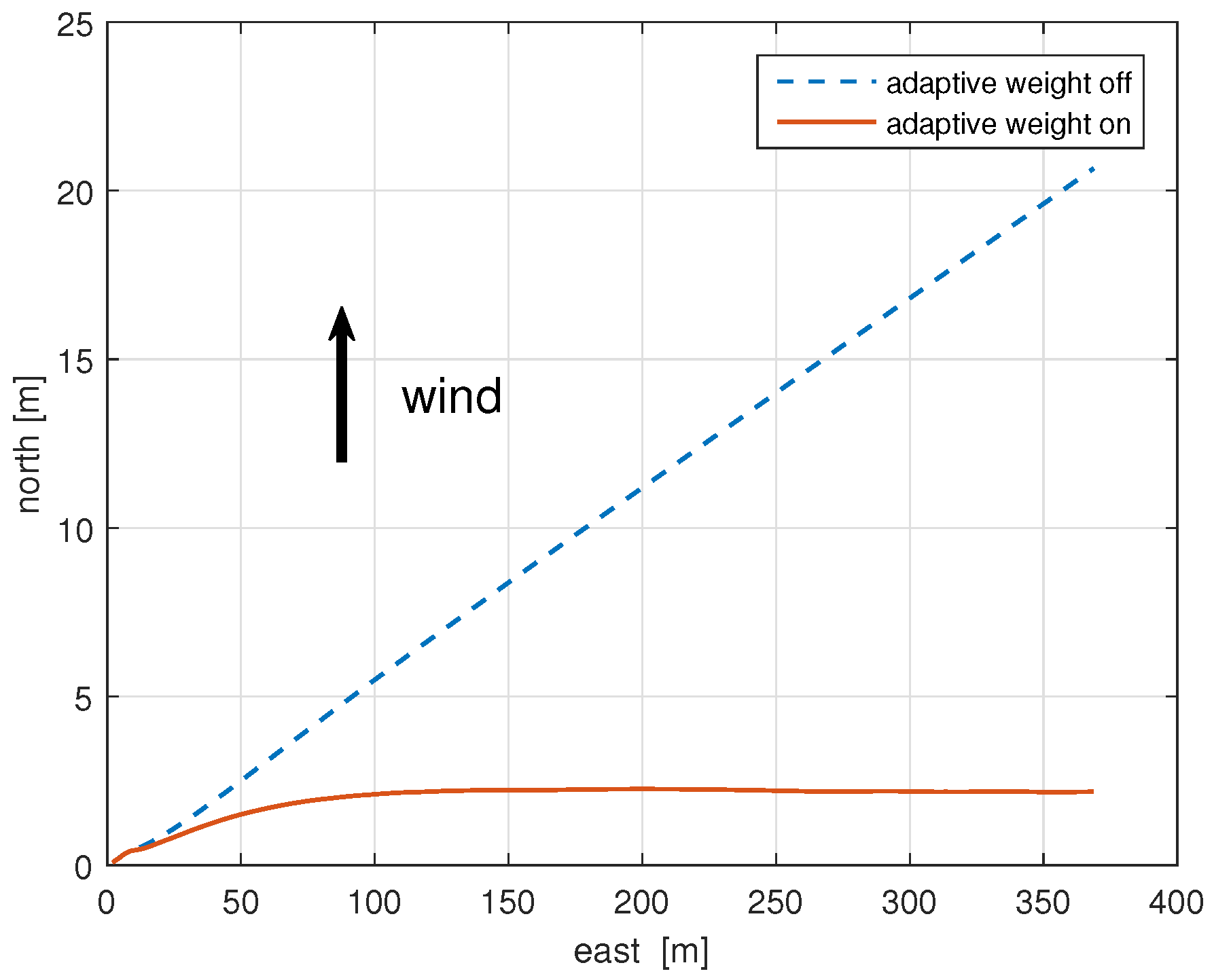
Figure 13.
Sailing trajectory with and without adaptive weight term. The blue dashed line in the figure is the trajectory without adaptive weight term, and the solid orange line is the trajectory with adaptive weight term, when keeping a 90 + 1.5 degrees course in calm water.
Figure 13.
Sailing trajectory with and without adaptive weight term. The blue dashed line in the figure is the trajectory without adaptive weight term, and the solid orange line is the trajectory with adaptive weight term, when keeping a 90 + 1.5 degrees course in calm water.
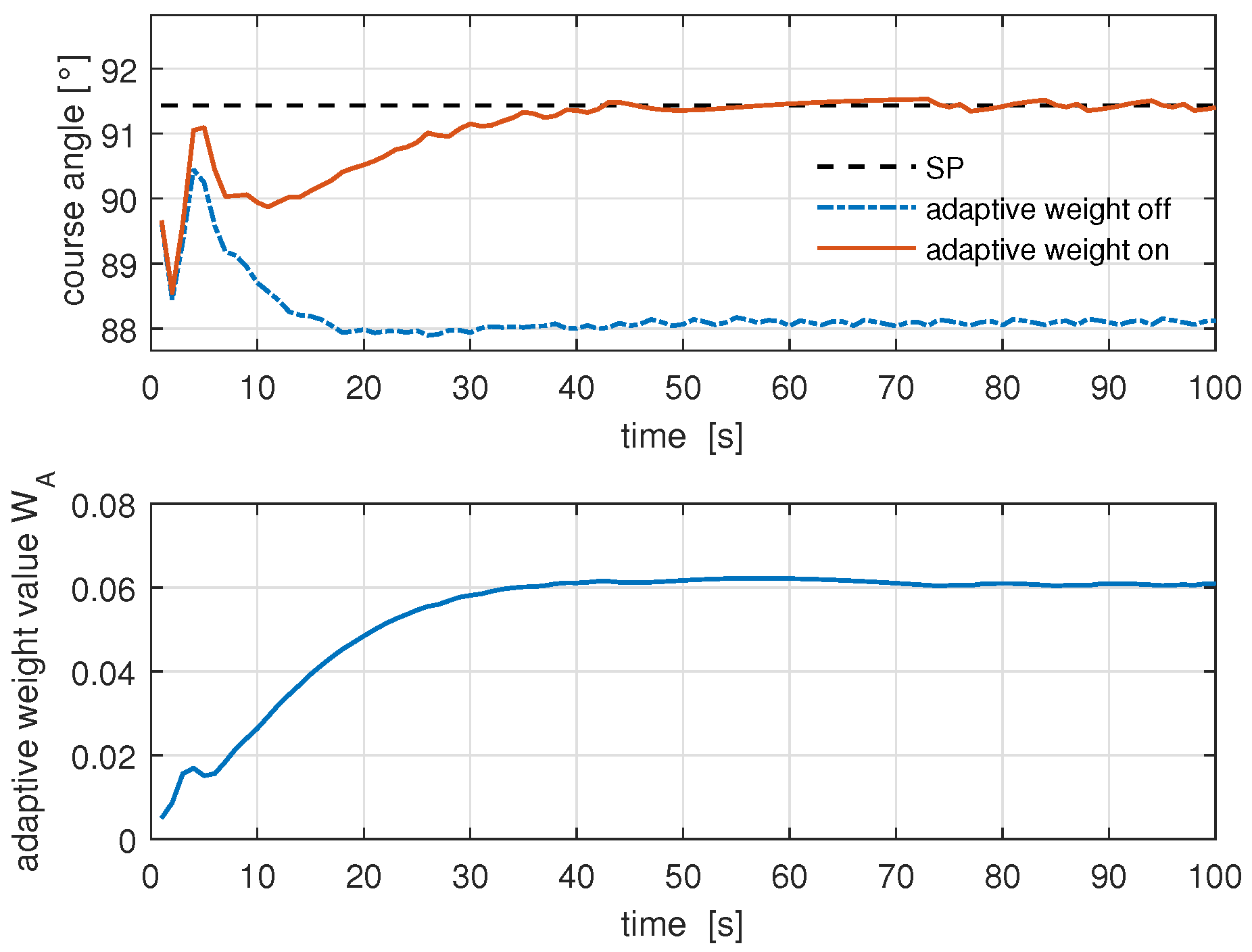
Figure 14.
Course tracking data with and without adaptive weight term. The top graph shows the change of heading during the course of navigation. The SP (Set Point) is heading control input. The solid orange line shows the change of heading with adaptive weight, and the dashed blue line shows the change of heading without adaptive weight. The lower graph shows the trend of the adaptive weight value during the course of the navigation.
Figure 14.
Course tracking data with and without adaptive weight term. The top graph shows the change of heading during the course of navigation. The SP (Set Point) is heading control input. The solid orange line shows the change of heading with adaptive weight, and the dashed blue line shows the change of heading without adaptive weight. The lower graph shows the trend of the adaptive weight value during the course of the navigation.
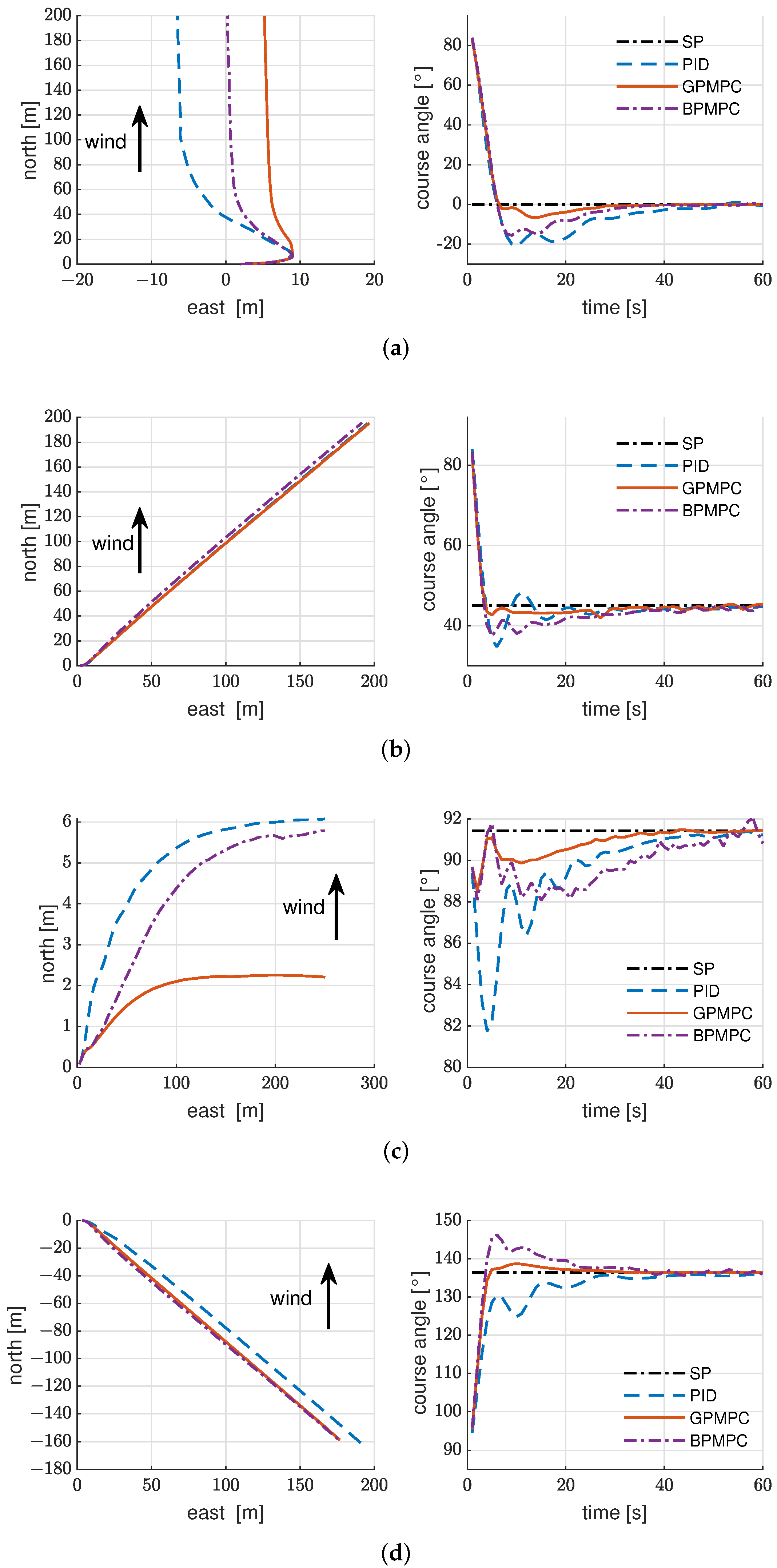
Figure 15.
The sailing trajectory (left) and course angle curve (right) in different heading changes. The black dotted line is Set Point (SP), the blue dashed line is the PID control effect, the purple dotted line is the BPMPC control effect, and the orange solid line is the GPMPC control effect. (a) The course angle from 90 degrees to 0 degrees; (b) the course angle from 90 degrees to 45 degrees; (c) the course angle from 90 degrees to 90 + 1.5 degrees; and (d) the course angle from 90 degrees to 135 degrees.
Figure 15.
The sailing trajectory (left) and course angle curve (right) in different heading changes. The black dotted line is Set Point (SP), the blue dashed line is the PID control effect, the purple dotted line is the BPMPC control effect, and the orange solid line is the GPMPC control effect. (a) The course angle from 90 degrees to 0 degrees; (b) the course angle from 90 degrees to 45 degrees; (c) the course angle from 90 degrees to 90 + 1.5 degrees; and (d) the course angle from 90 degrees to 135 degrees.
Figure 16.
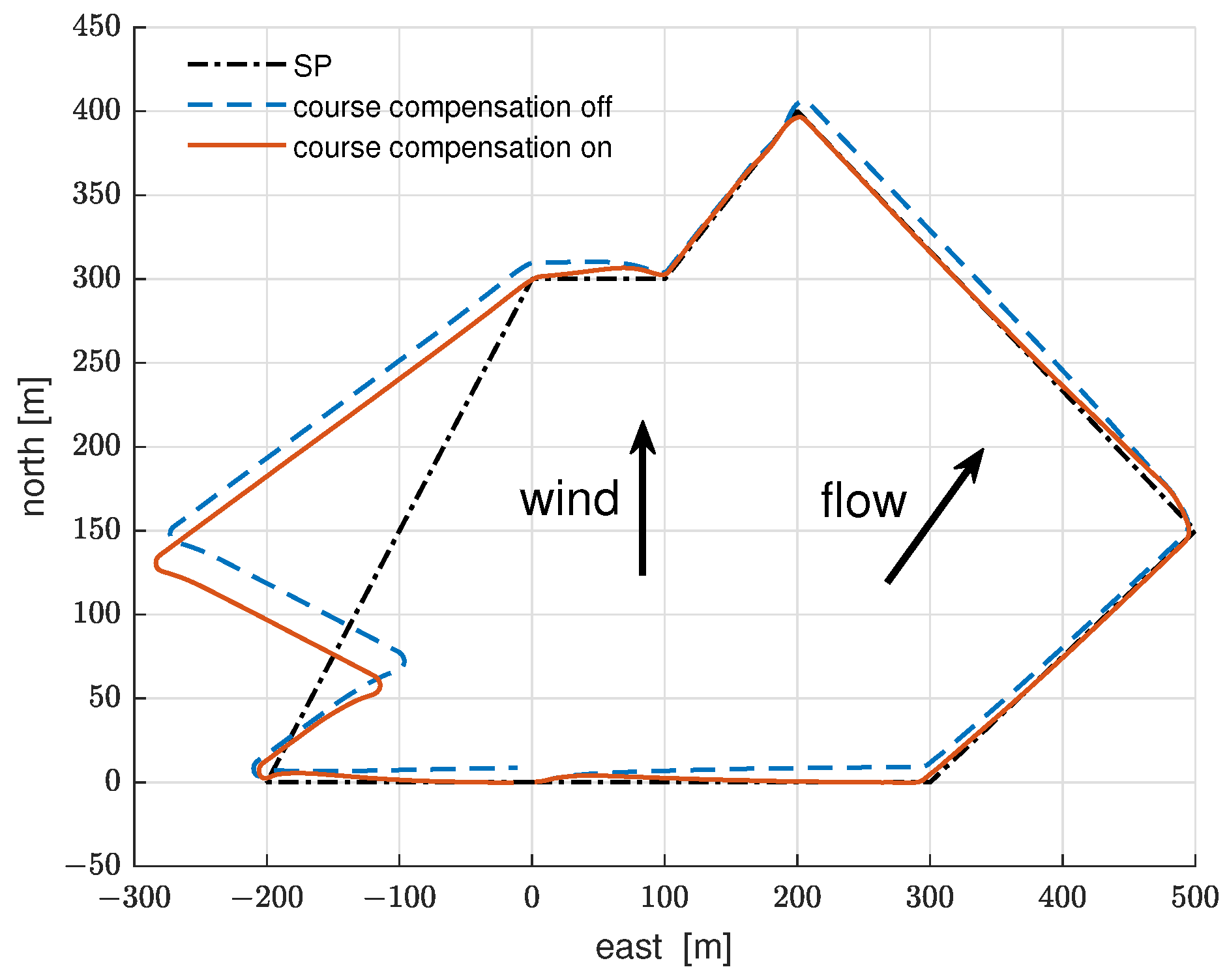
The sailing trajectory of LOS with and without heading compensation when there is current interference. The trajectory of waypoints in
Table 3 with wind direction at 0 degree, wind speed at 5 m/s. The black dotted line SP is the reference trajectory, the blue dashed line is the case without heading compensation, and the orange solid line is the case with heading compensation.
Figure 16.
The sailing trajectory of LOS with and without heading compensation when there is current interference. The trajectory of waypoints in
Table 3 with wind direction at 0 degree, wind speed at 5 m/s. The black dotted line SP is the reference trajectory, the blue dashed line is the case without heading compensation, and the orange solid line is the case with heading compensation.
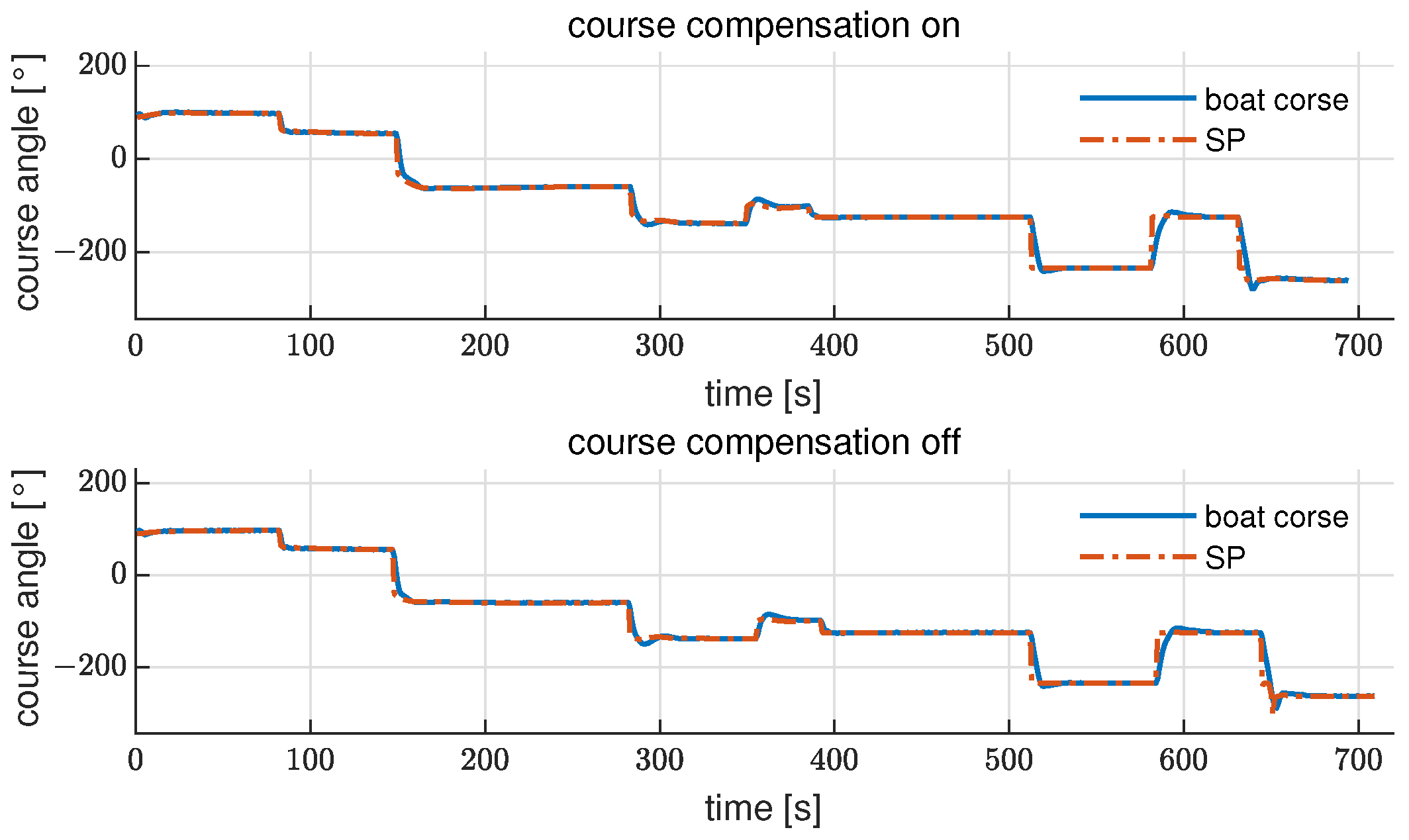
Figure 17.
Course change response curve of LOS with and without heading compensation in the current environment. The solid blue line is the actual heading and the dotted orange line SP is the control input.
Figure 17.
Course change response curve of LOS with and without heading compensation in the current environment. The solid blue line is the actual heading and the dotted orange line SP is the control input.
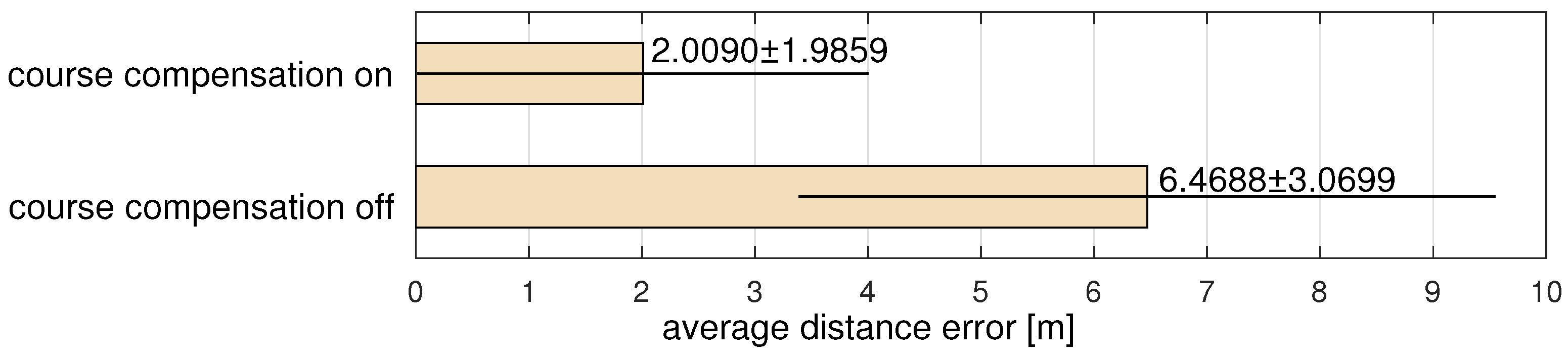
Figure 18.
The distance deviation from the reference trajectory. The mean and standard deviation of the distance deviation with and without heading compensation, for both control modes.
Figure 18.
The distance deviation from the reference trajectory. The mean and standard deviation of the distance deviation with and without heading compensation, for both control modes.
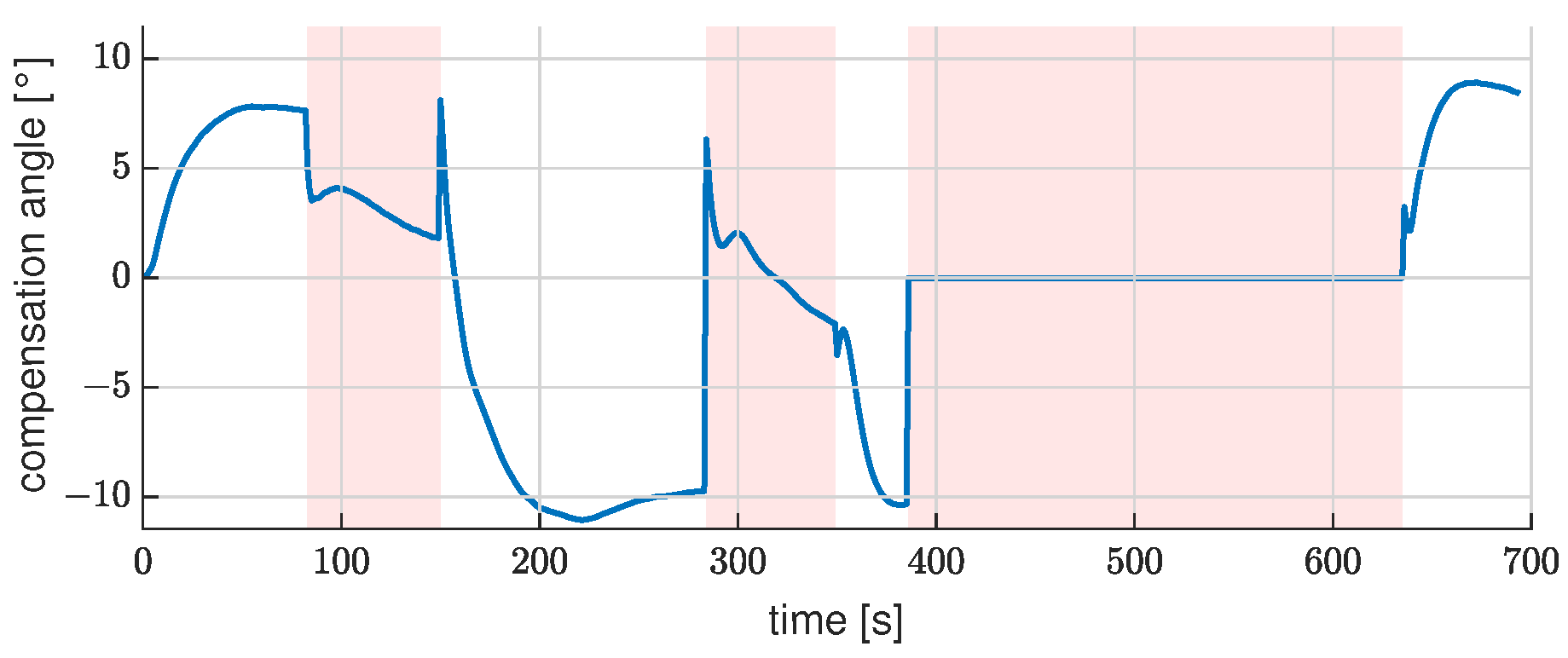
Figure 19.
Heading compensation amount. The amount of heading compensation for each course track during navigation, which is zero when sailing up-wind because there is no reference track.
Figure 19.
Heading compensation amount. The amount of heading compensation for each course track during navigation, which is zero when sailing up-wind because there is no reference track.
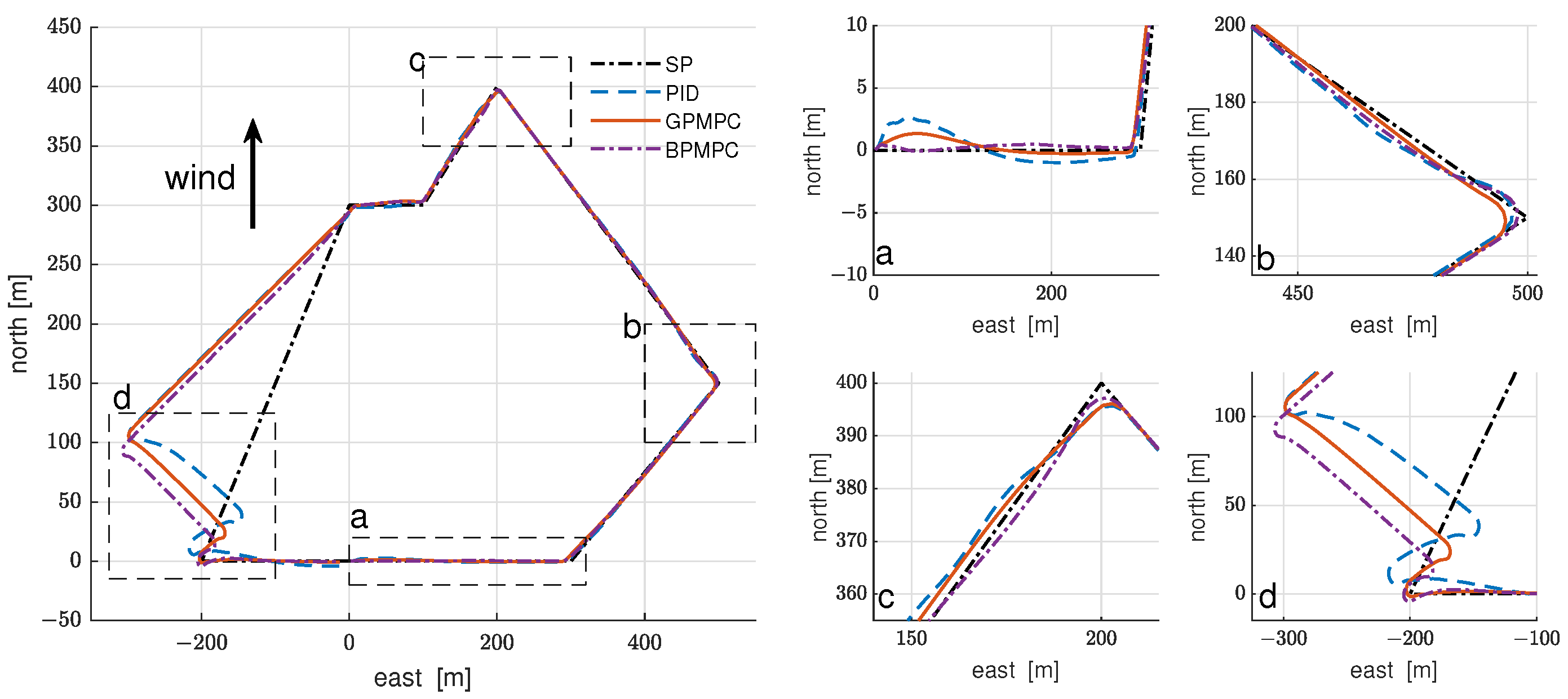
Figure 20.
The sailing trajectory under the calm water surface. The black dotted line in the figure is the reference trajectory, the blue dashed line is the PID control effect, the purple dotted line is the BPMPC control effect, and the orange solid line is the GPMPC control effect. The right side shows the zoomed-in view of the local trajectories in the four areas of (a–d).
Figure 20.
The sailing trajectory under the calm water surface. The black dotted line in the figure is the reference trajectory, the blue dashed line is the PID control effect, the purple dotted line is the BPMPC control effect, and the orange solid line is the GPMPC control effect. The right side shows the zoomed-in view of the local trajectories in the four areas of (a–d).
Figure 21.
Heading change under calm water. The top graph shows the response curve of heading change under PID control, the middle graph shows the response curve of heading change under BPMPC control, and the bottom graph shows the response curve of heading change under GPMPC control, the solid blue line is the actual heading and the dashed orange line is the target heading.
Figure 21.
Heading change under calm water. The top graph shows the response curve of heading change under PID control, the middle graph shows the response curve of heading change under BPMPC control, and the bottom graph shows the response curve of heading change under GPMPC control, the solid blue line is the actual heading and the dashed orange line is the target heading.
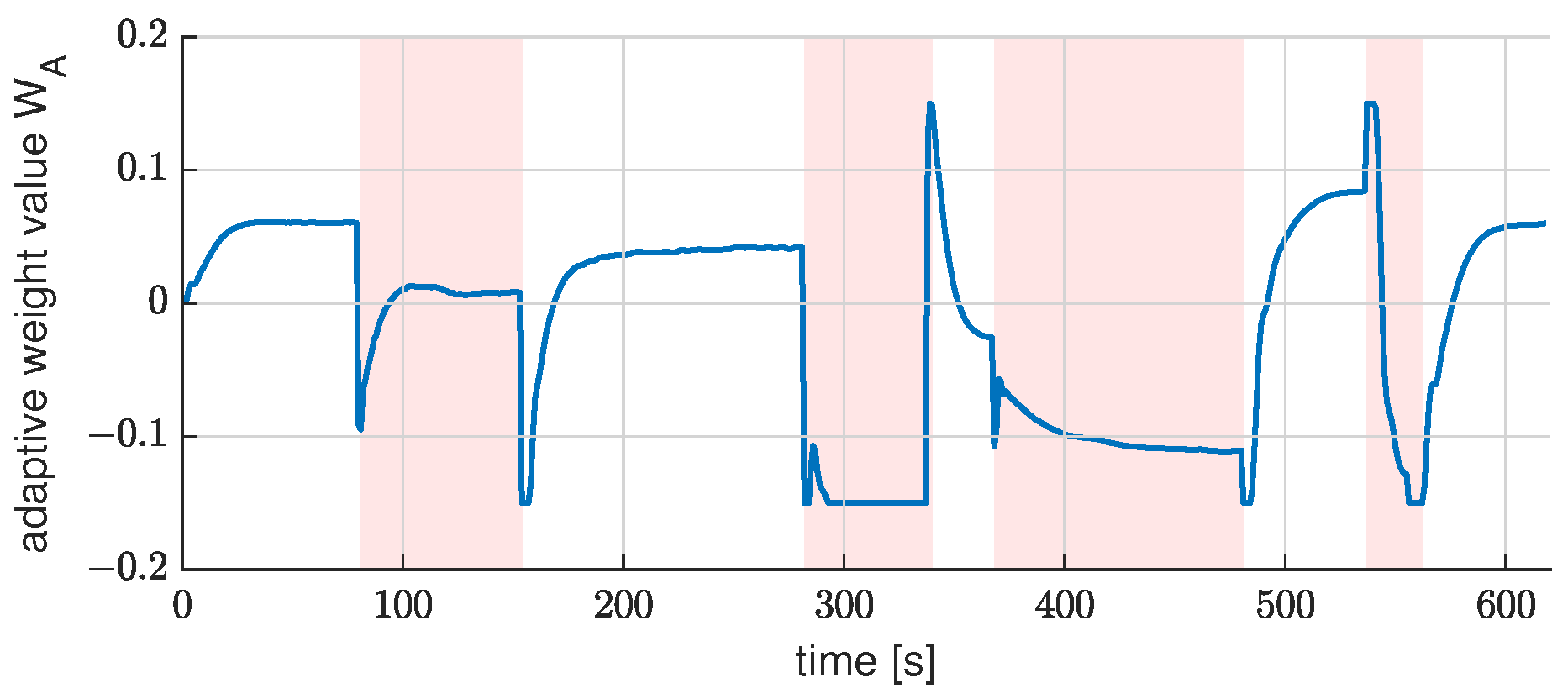
Figure 22.
The change in the adaptive weight value for each leg of the course during navigation.
Figure 22.
The change in the adaptive weight value for each leg of the course during navigation.
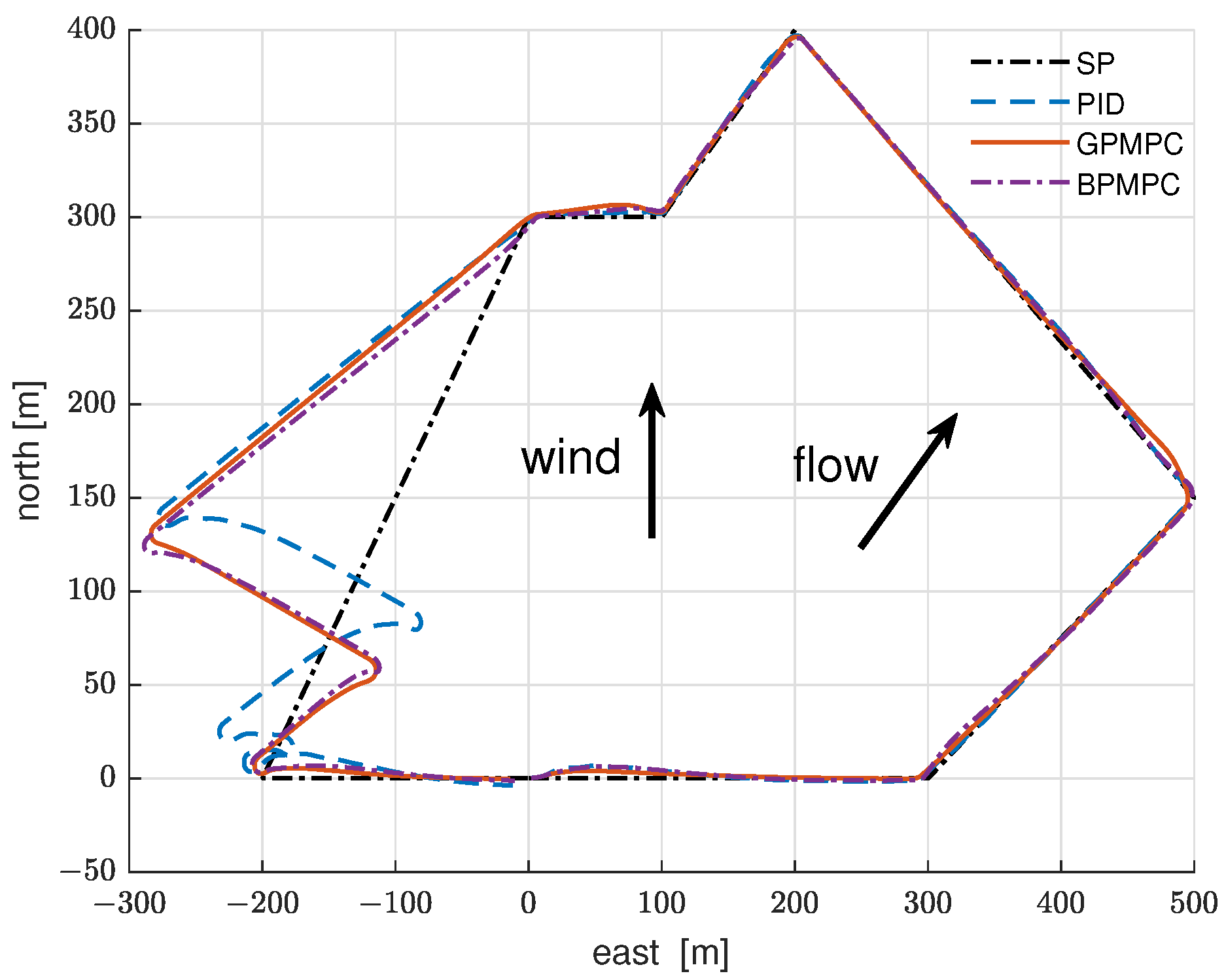
Figure 23.
Sailing trajectory with current disturbance. The black dotted line is the reference trajectory, the blue dashed line is the PID control, the purple dotted line is the BPMPC control effect, and the orange solid line is the GPMPC control.
Figure 23.
Sailing trajectory with current disturbance. The black dotted line is the reference trajectory, the blue dashed line is the PID control, the purple dotted line is the BPMPC control effect, and the orange solid line is the GPMPC control.
Figure 24.
The response curve of heading change with and without course compensation for LOS with current disturbance. The top graph shows the PID control case, the middle graph shows the BPMPC control case, and the bottom graph shows the GPMPC control case. The solid blue line is the actual heading and the dashed orange line is the target heading.
Figure 24.
The response curve of heading change with and without course compensation for LOS with current disturbance. The top graph shows the PID control case, the middle graph shows the BPMPC control case, and the bottom graph shows the GPMPC control case. The solid blue line is the actual heading and the dashed orange line is the target heading.
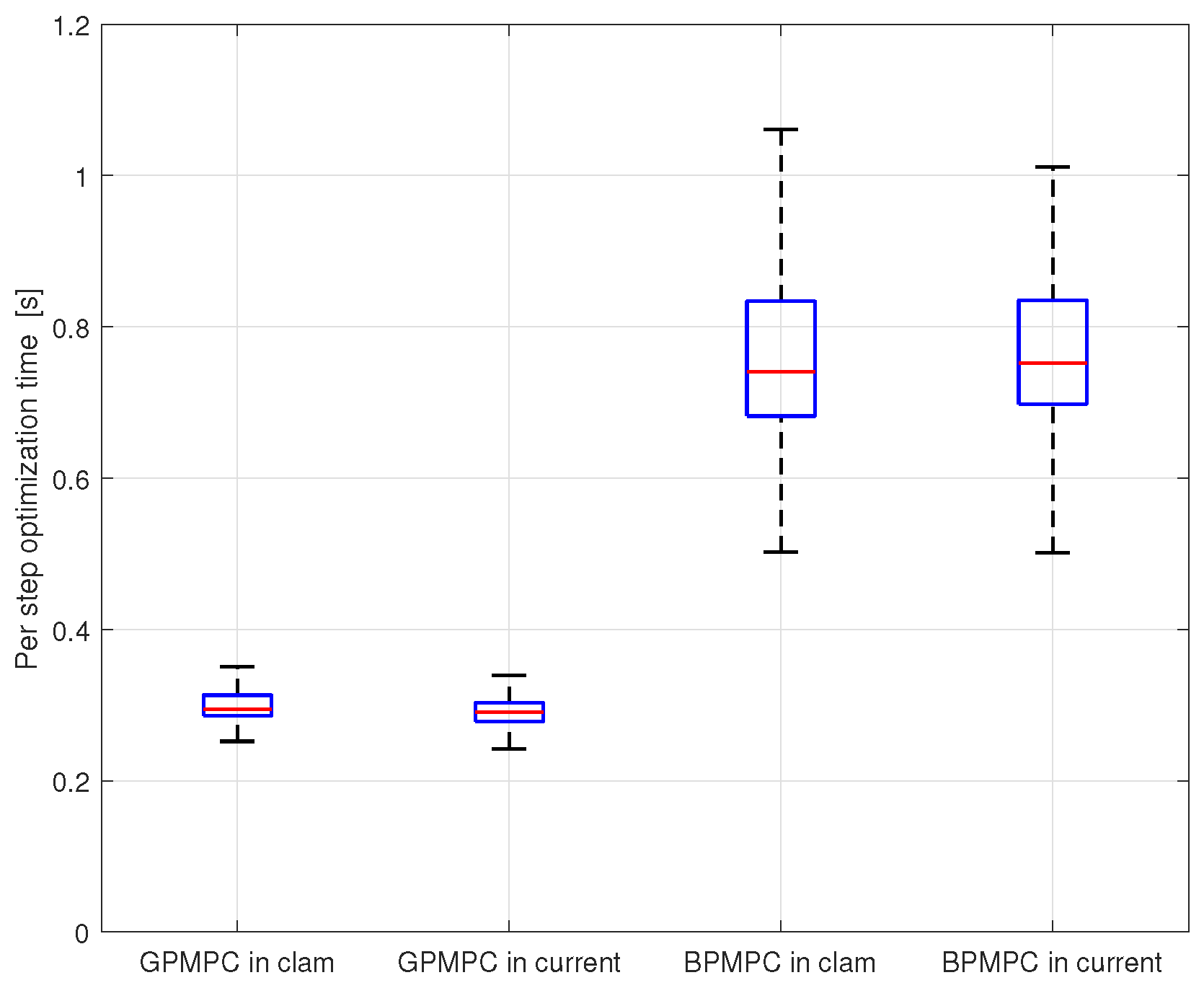
Figure 25.
Single step optimization time statistics of GPMPC and BPMPC under different conditions (box diagram).
Figure 25.
Single step optimization time statistics of GPMPC and BPMPC under different conditions (box diagram).
Table 1.
Variable definitions.
Table 1.
Variable definitions.
| Variable | Description |
|---|
| Sailboat X-axis position |
| Sailboat Y-axis position |
| Sailboat roll angle |
| Sailboat yaw angle |
| Sailboat forward velocity |
| Sailboat transverse velocity |
| Sailboat roll velocity |
| Sailboat yaw velocity |
| Sail angle |
| Rudder angle |
| Geodetic coordinate |
| Sailboat hull coordinate |
| CM | Sailboat center of mass |
| SC, CC, RC | Force center of sail/centerboard/rudder |
| Lift force and drag force of sail |
| Lift force and drag force of centerboard |
| Lift force and drag force of rudder |
| Absolute wind/current angle |
| Absolute wind/current velocity |
| Relative angle between fluid and foil |
| Reference input of rudder/sail/course |
| Line of sight guidance heading |
Table 2.
Sailing physical parameters.
Table 2.
Sailing physical parameters.
| Parameter | Value |
|---|
| Rigid body mass matrix | |
| Added mass matrix | |
| Rigid body coriolis matrix | |
| Added coriolis matrix | |
| Mass | |
| -axis moment of inertia | |
| -axis moment of inertia | |
Table 3.
Planned waypoints.
Table 3.
Planned waypoints.
| Number | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
|---|
| x[m] | 0 | 0 | 150 | 400 | 300 | 300 | 0 | 0 |
| y[m] | 0 | 300 | 500 | 200 | 100 | 0 | −200 | 0 |
Table 4.
The control accuracy of heading deviation and vertical distance deviation.
Table 4.
The control accuracy of heading deviation and vertical distance deviation.
| | Case A | Case B | Case C | Case D | Case E | Case F | Case G |
|---|
| RMS of | 0.2413 | 0.2572 | 0.2047 | 0.3021 | 0.2022 | 0.1847 | 0.1903 |
| CEP95 of | 0.4383 | 0.2981 | 0.1178 | 0.7103 | 0.2546 | 0.1791 | 0.1960 |
| RMS of | 2.6703 | 1.7821 | 2.0118 | 3.7047 | 3.0128 | 2.8232 | 7.1267 |
| CEP95 of | 6.4367 | 3.1951 | 3.6889 | 8.9354 | 6.1171 | 5.1812 | 9.7369 |
Table 5.
The dynamic response index of course tracking control.
Table 5.
The dynamic response index of course tracking control.
| | Case A | Case B | Case C | Case D | Case E | Case F |
|---|
| Maximum overshoot | 42.4% | 27.2% | 23.8% | 47.3% | 26.1% | 9.89% |
| Maximum adjustment time | 36 s | 16 s | 15 s | 42 s | 18 s | 17 s |










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}