A Novel Improved Coupled Dynamic Solid Boundary Treatment for 2D Fluid Sloshing Simulation


Abstract
:1. Introduction
2. The SPH Scheme
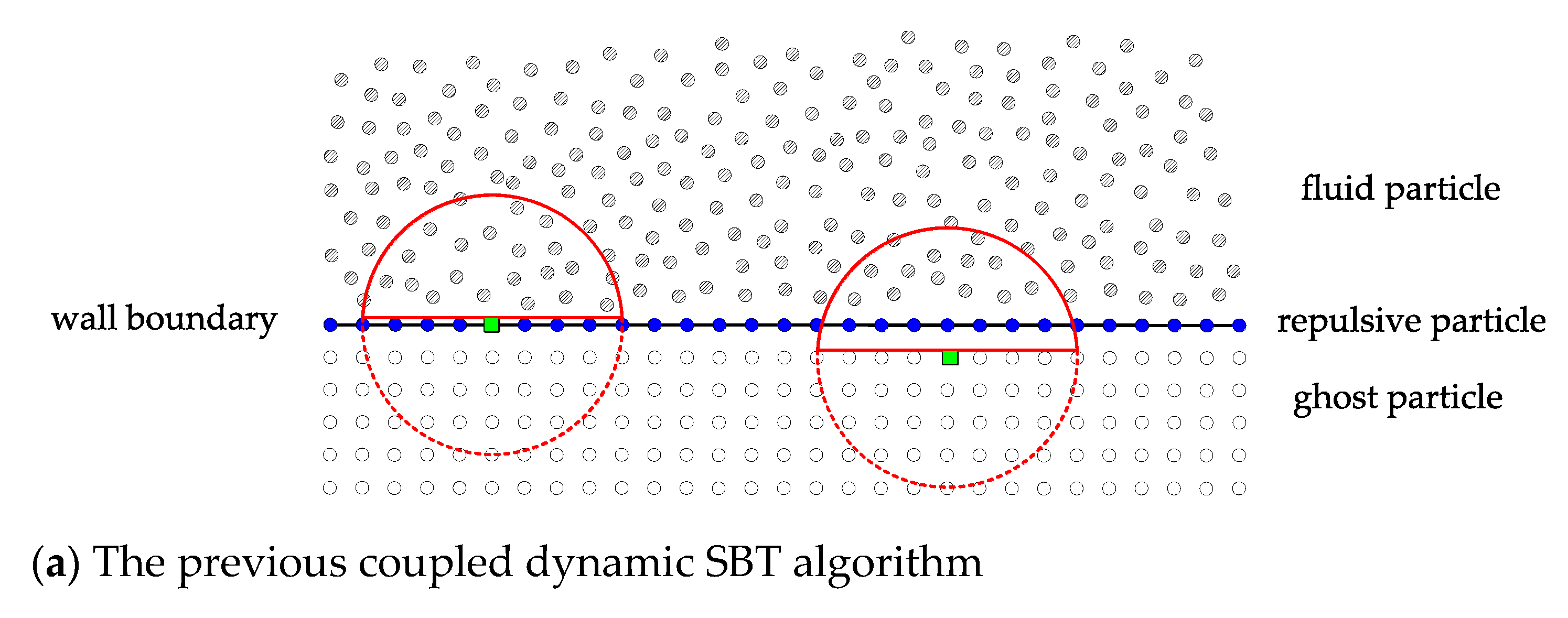
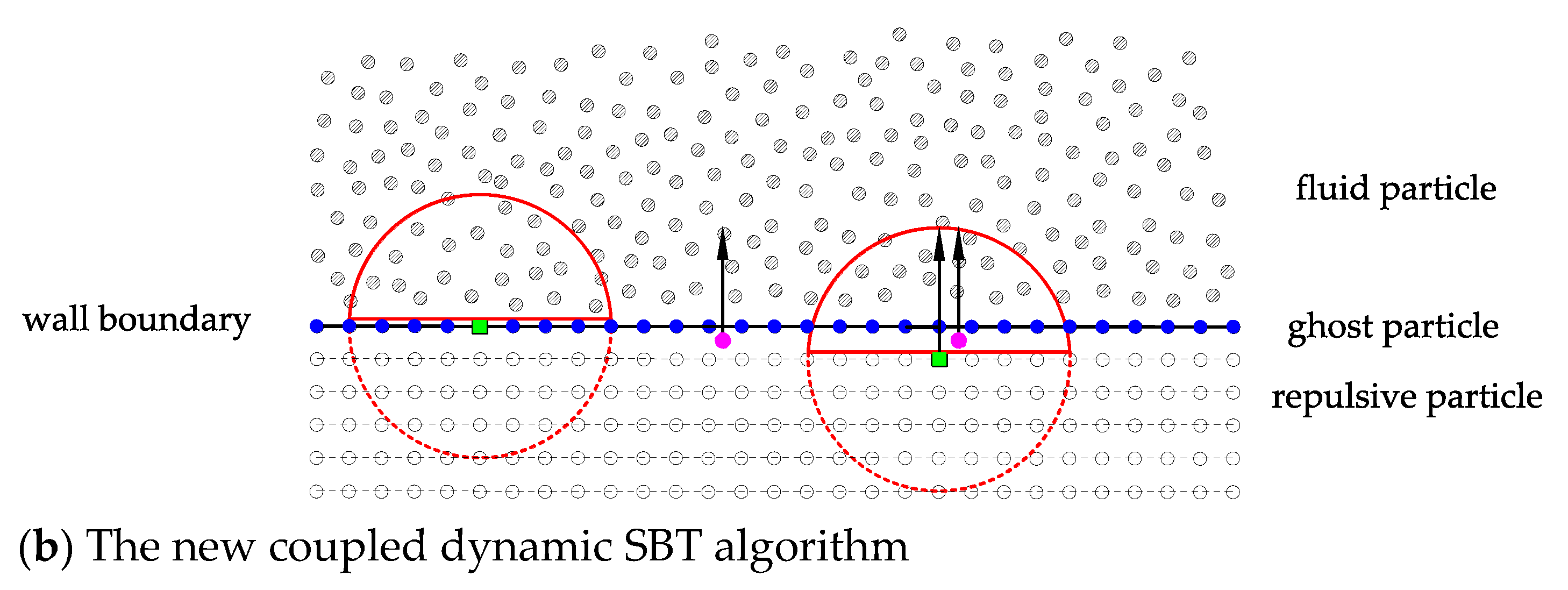
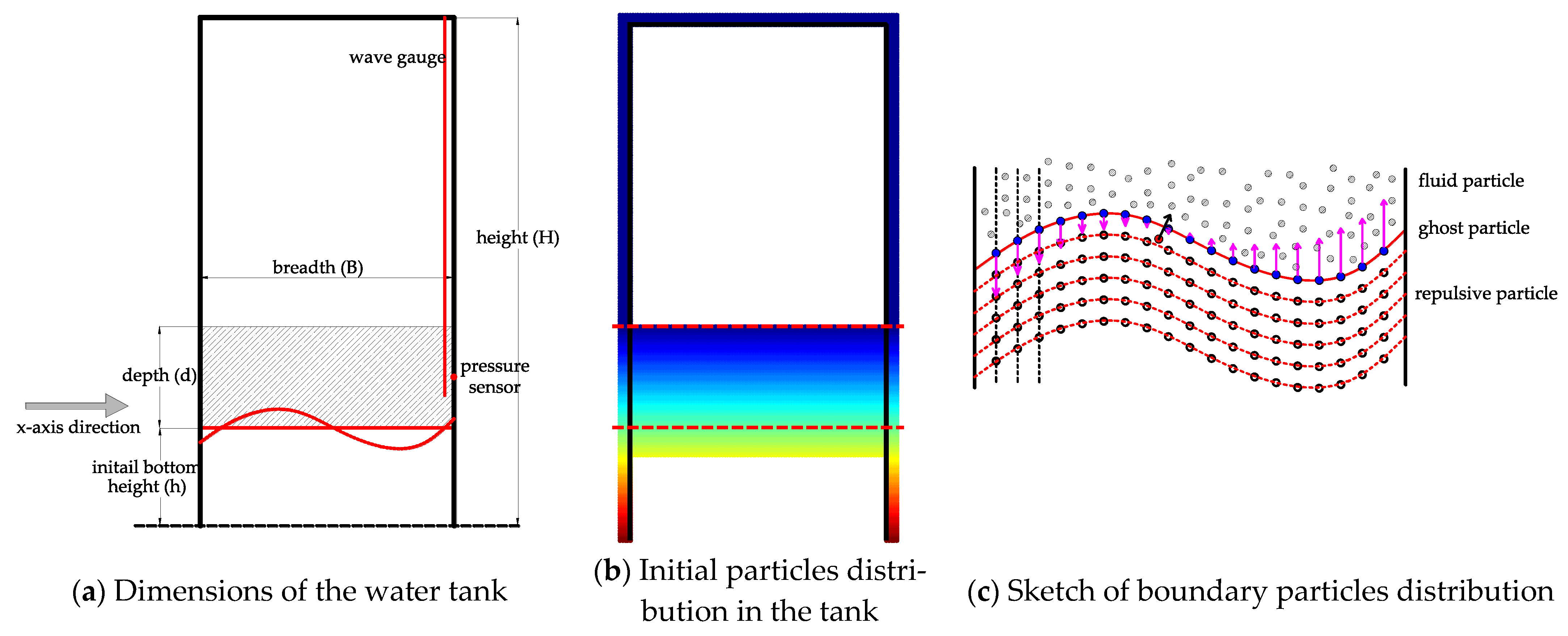
3. Wall Boundary Conditions Methodology
4. Numerical Results
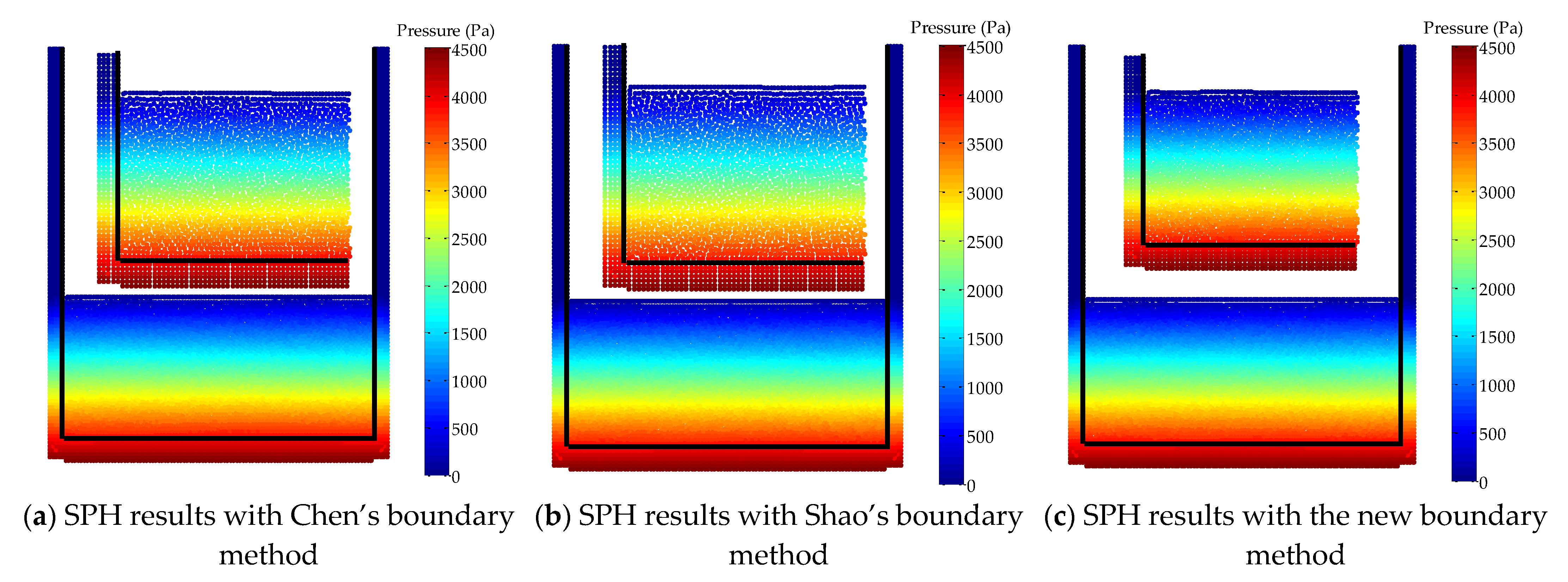
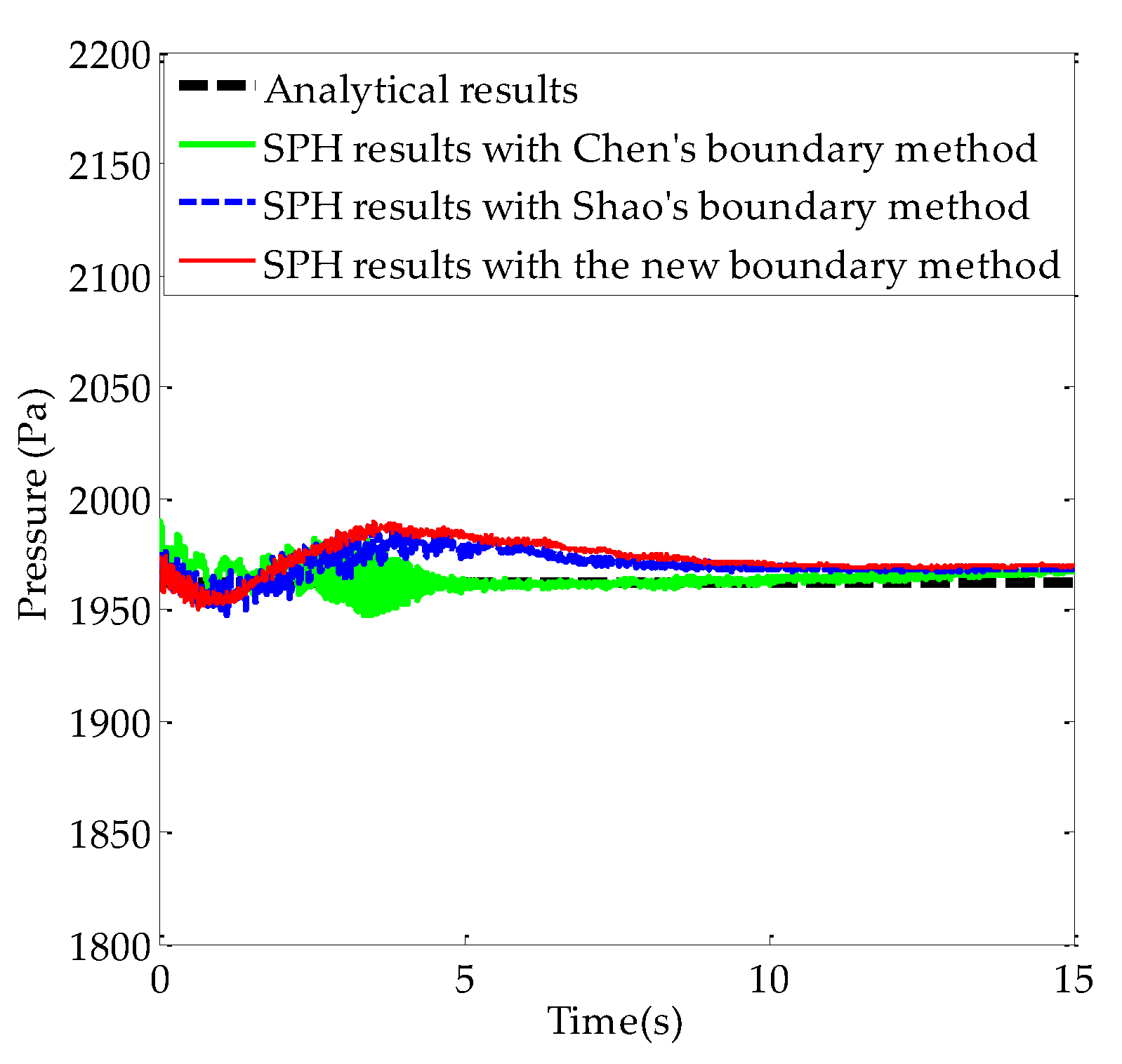
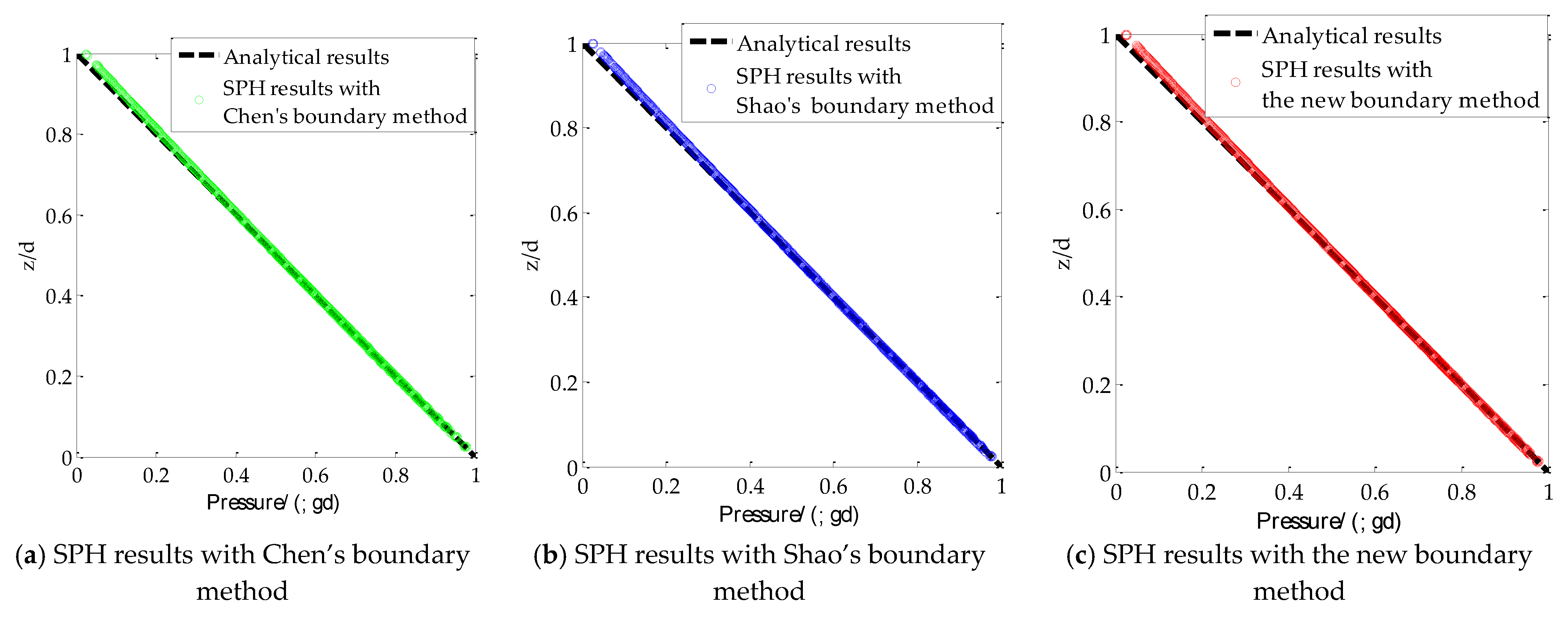
4.1. Still Water Case
4.2. Sloshing in Rectangular Tank with Different Filling Ratios
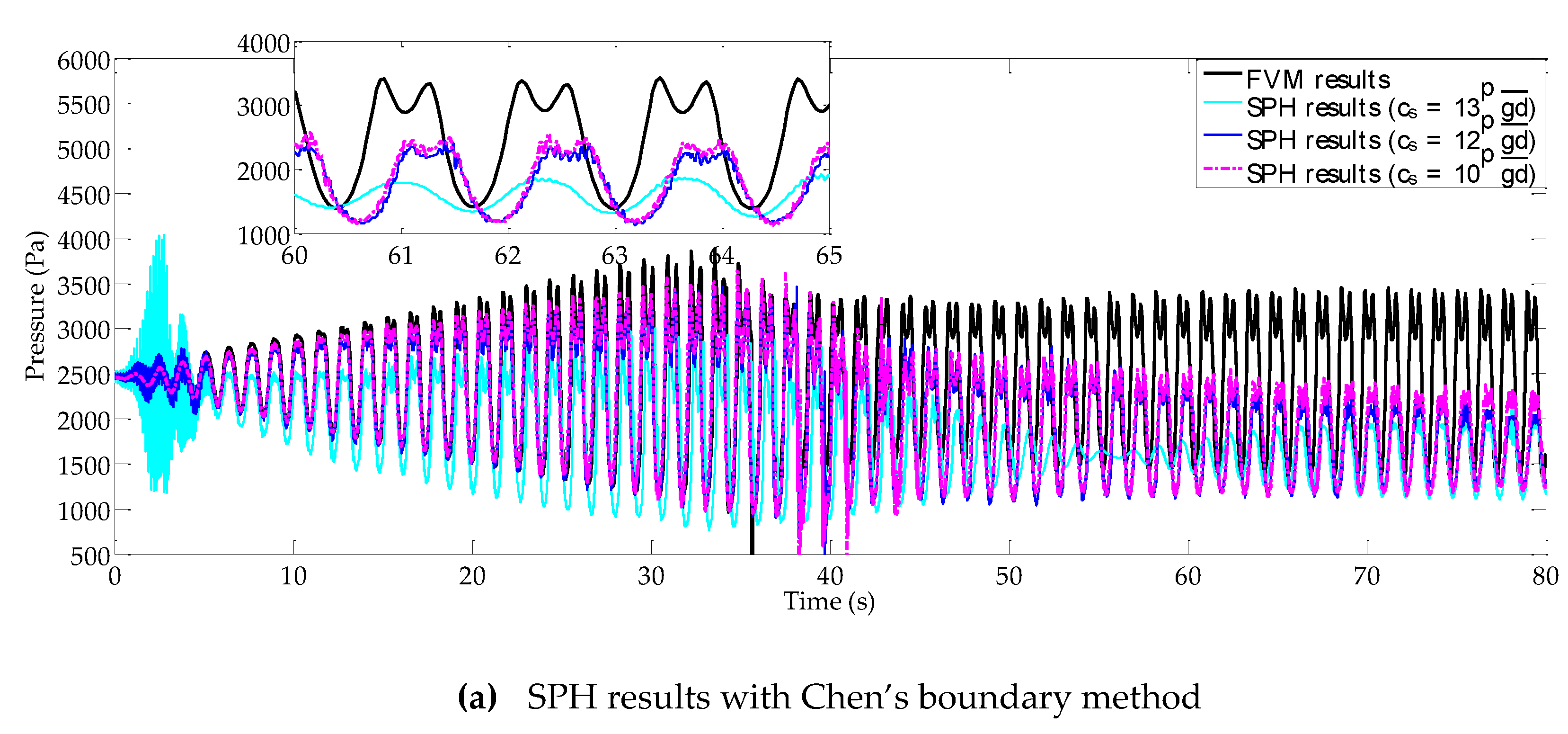
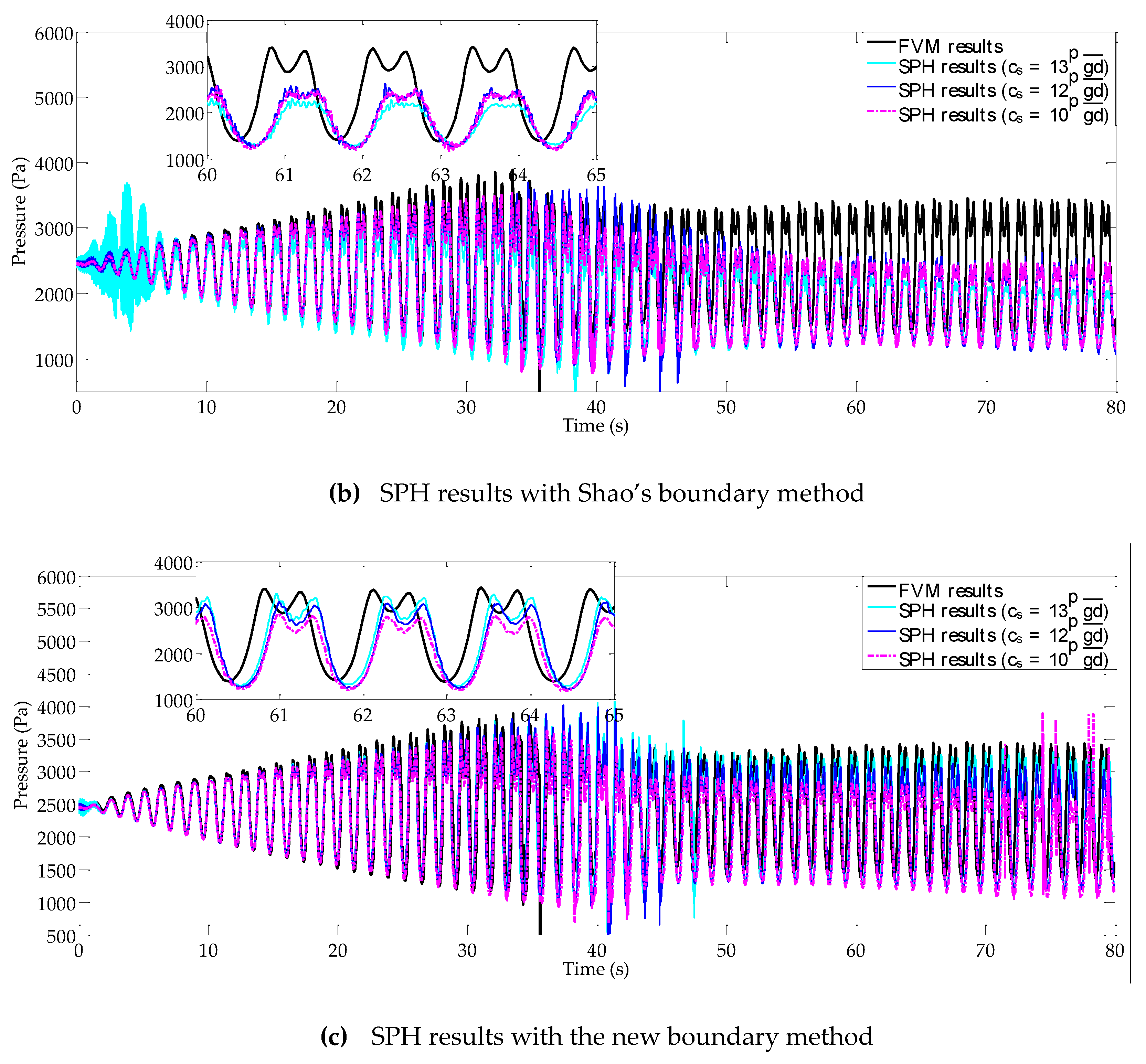
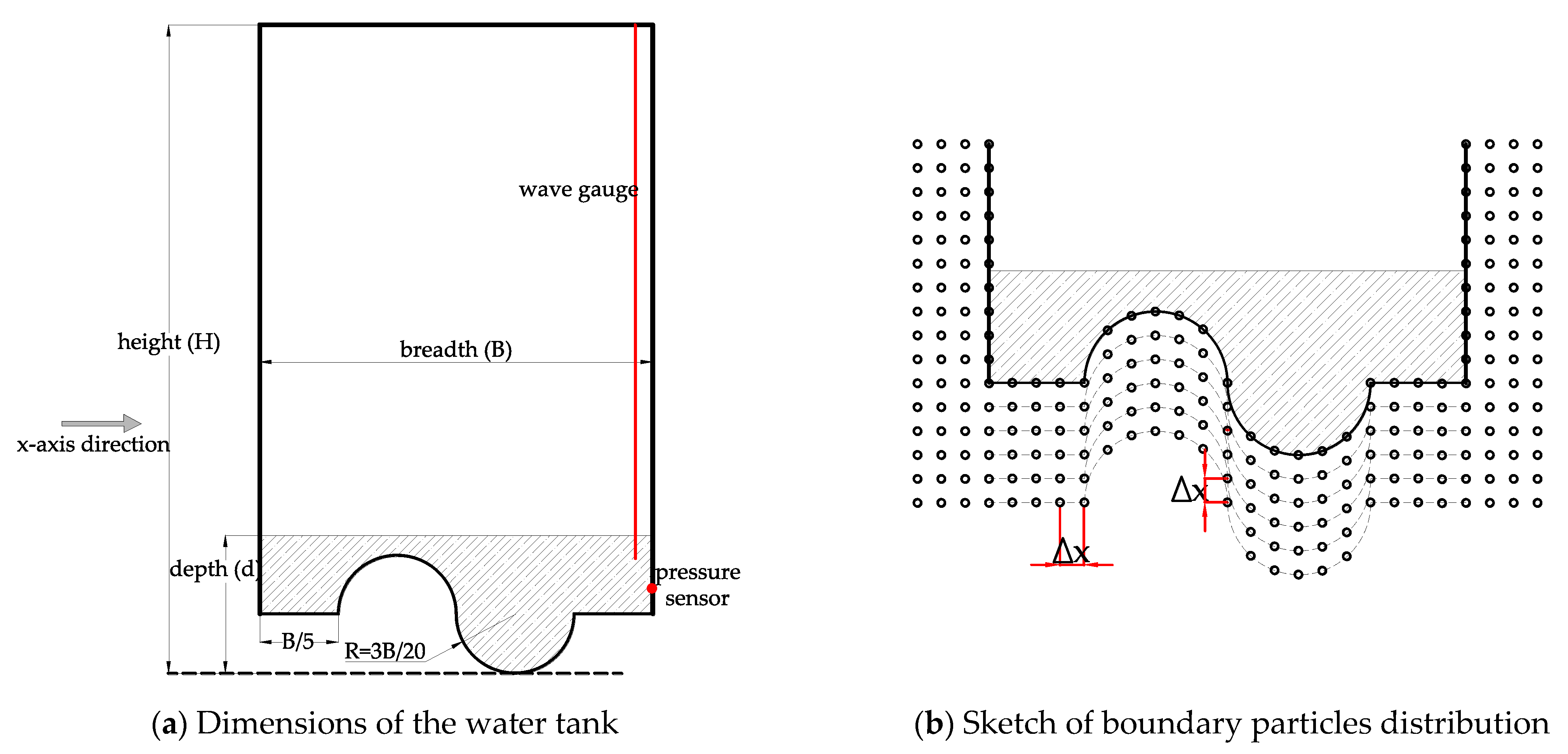
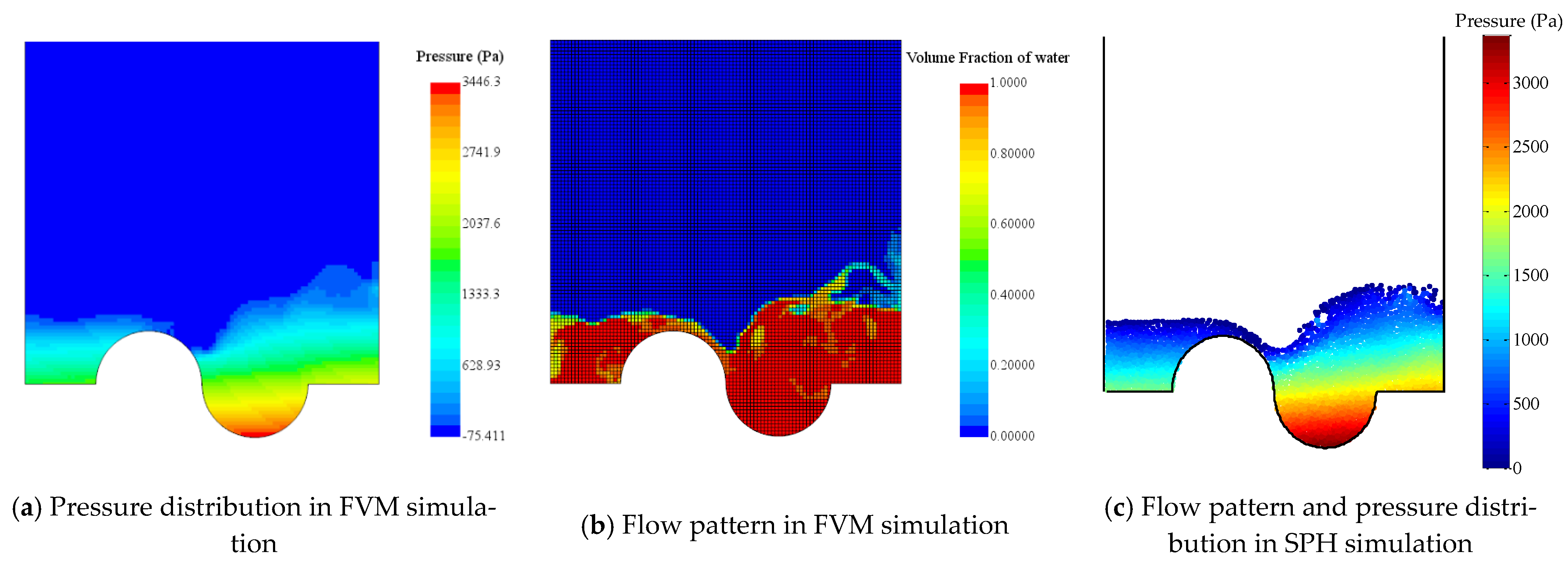
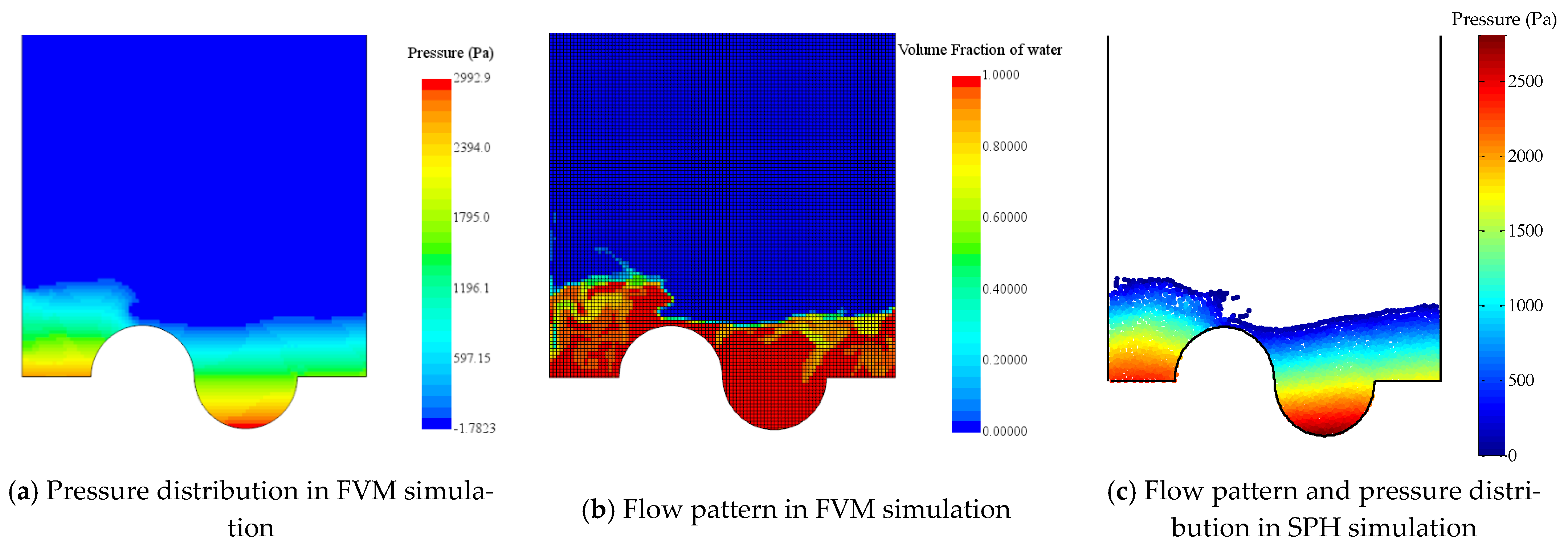
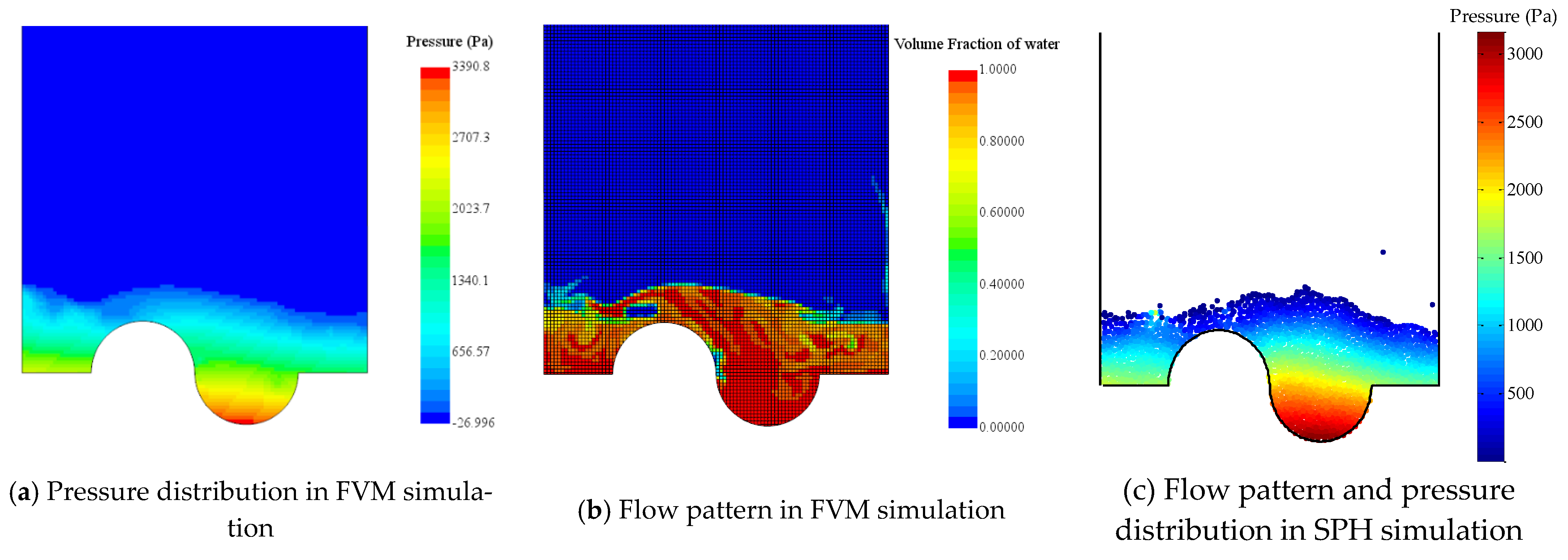
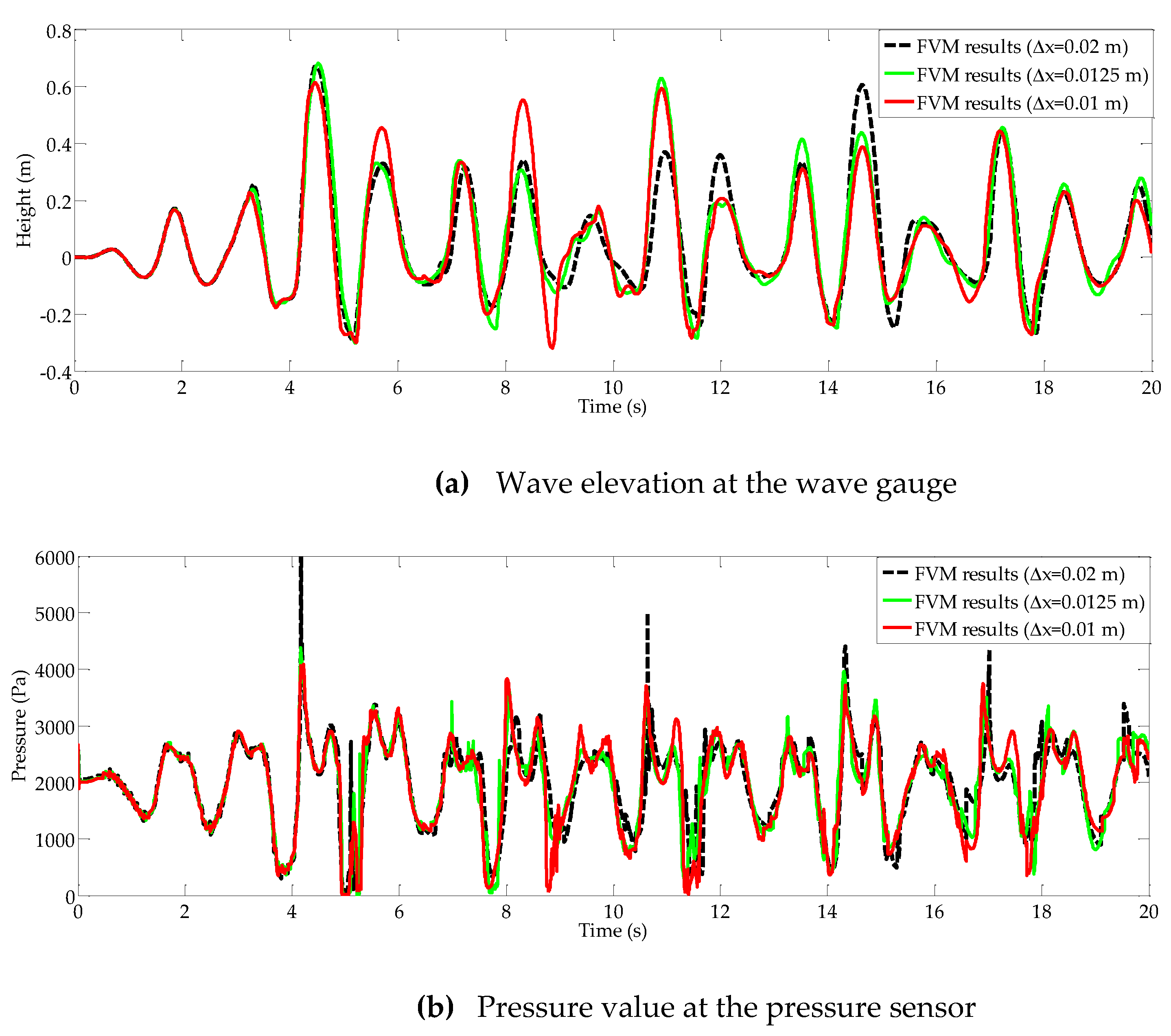
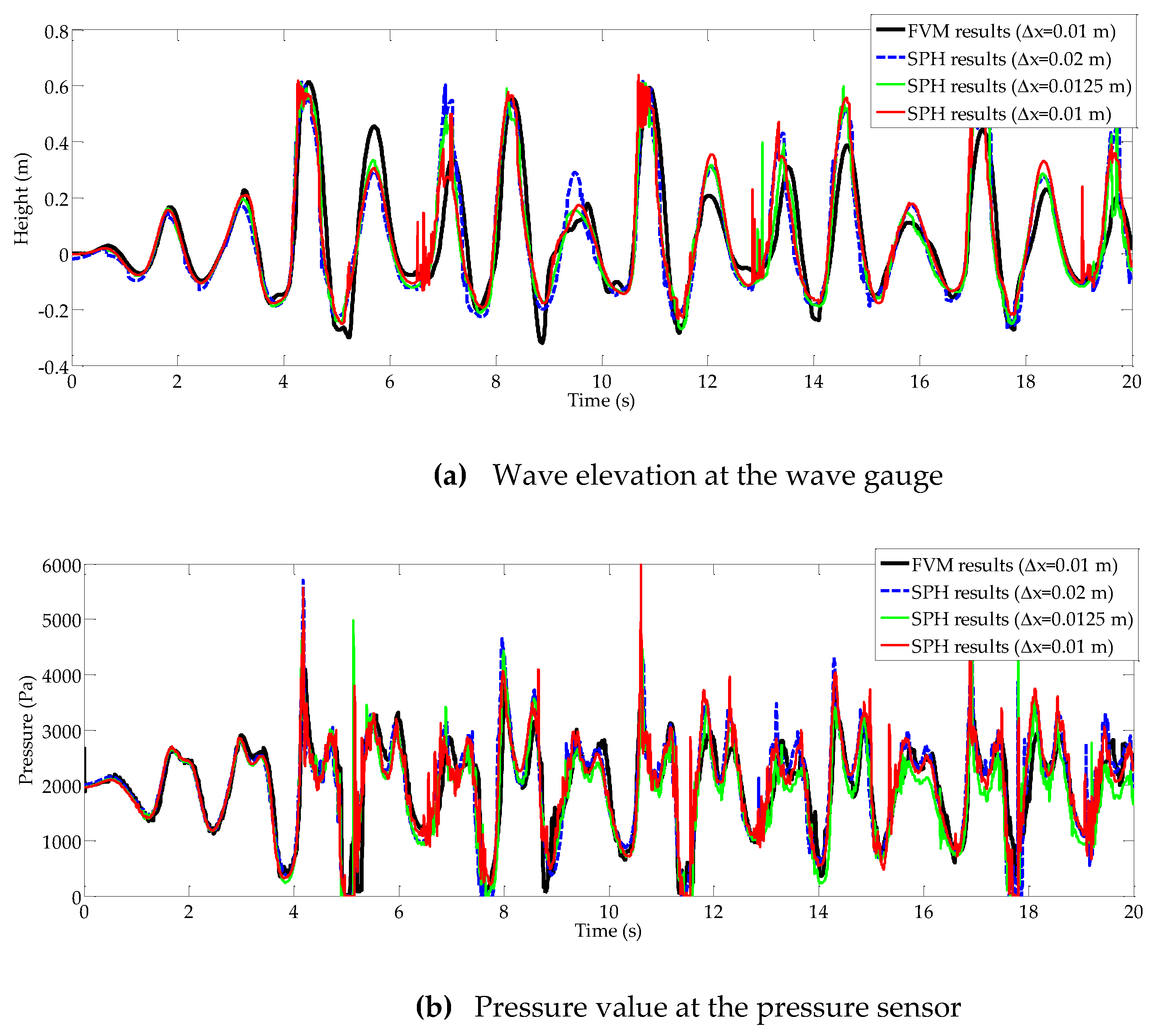
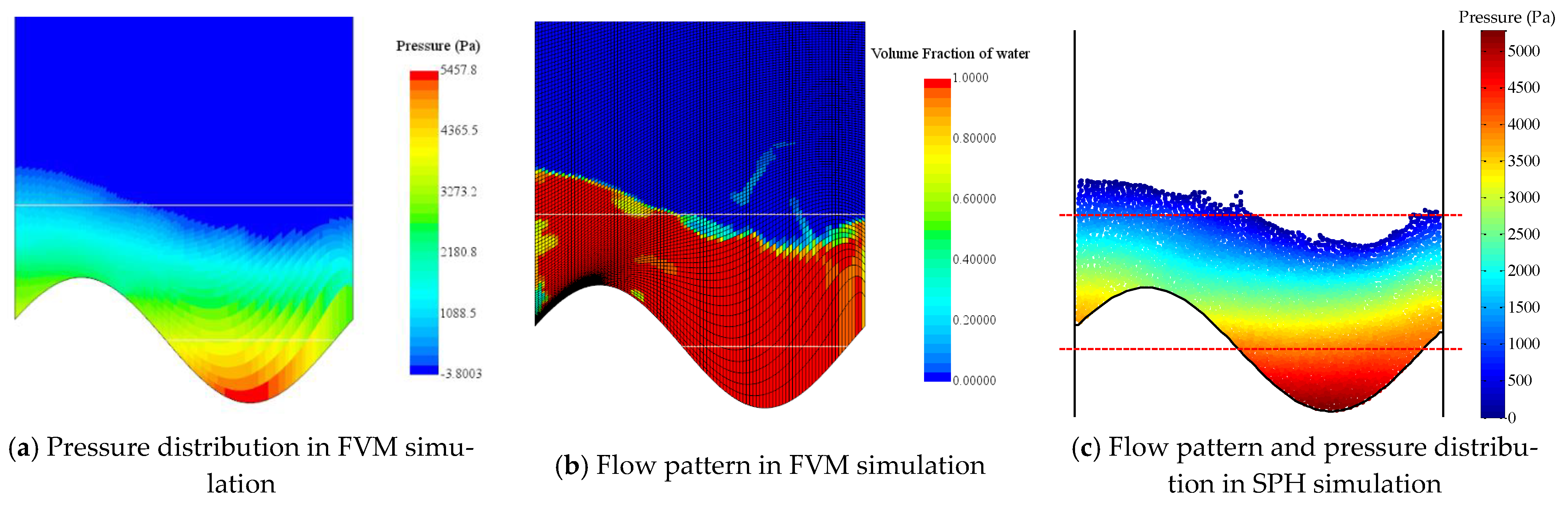
4.3. Sloshing in Tanks with Complex Geometry
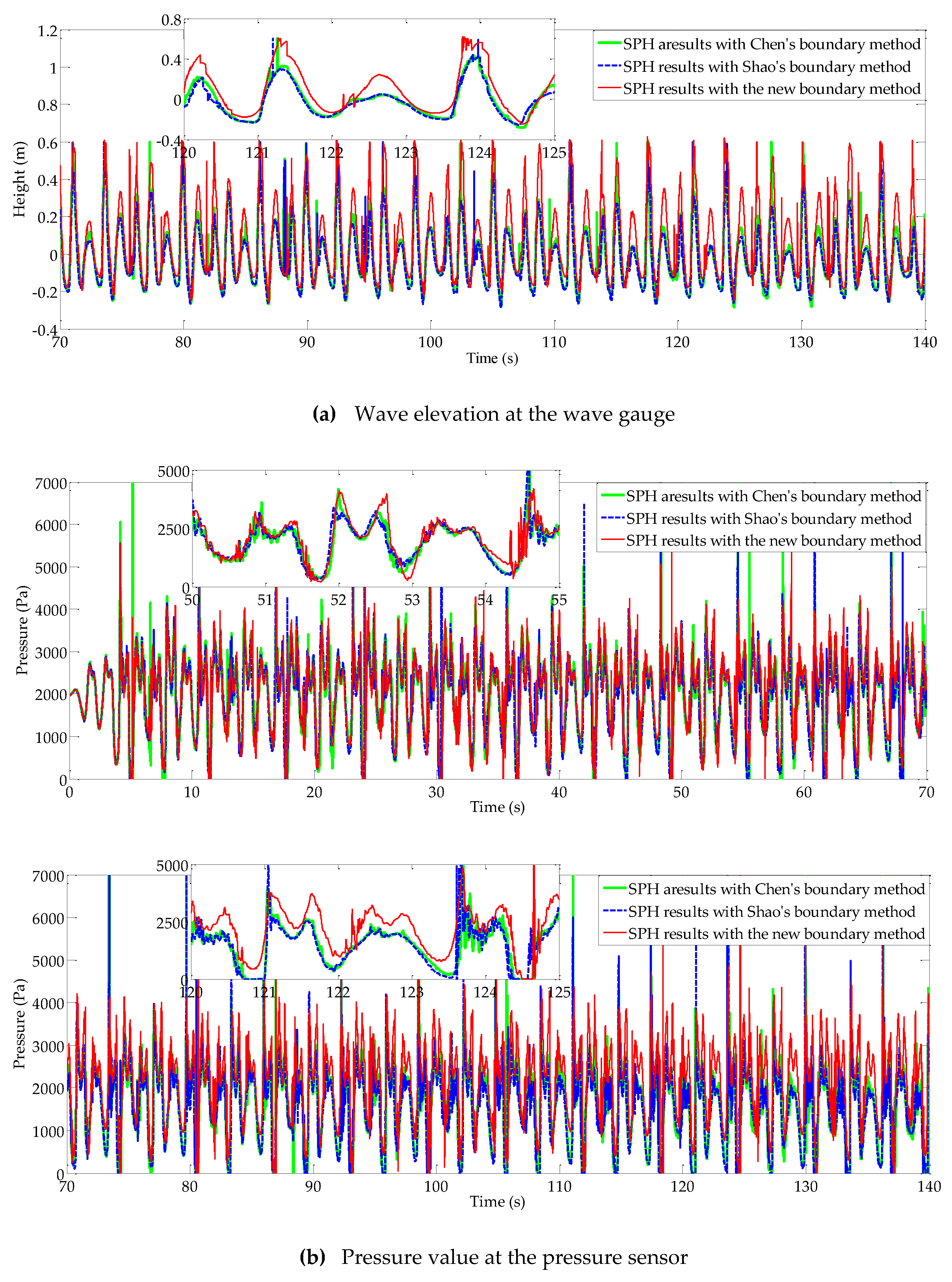
4.4. Sloshing in Tank with Unidirectional Deformable Boundaries
5. Conclusions
- (1)
- The improvement in the ability to prevent fluid particles penetration is achieved in the new SBT algorithm by improving the formulation of the repulsive forces, which enables the boundary method to simulate violent sloshing cases with complex geometries. Besides, comparing with the previous SBT algorithm, the numerical dissipation in these simulations with the new SBT algorithm is obviously reduced.
- (2)
- With the new SBT algorithm, the SPH scheme in this study can be used to simulate sloshing cases with unidirectional deformable boundary. The new SBT algorithm produces results with better numerical stability than the previous SBT algorithms.
- (3)
- The numerical stability and accuracy of the new SBT algorithm is validated for liquid sloshing cases. The numerical results obtained by the SPH scheme are in satisfactory agreement with the experimental results or FVM results calculated by STAR-CCM+. Besides, the new SBT algorithm shows great potential in the application of fluid-structure interaction problems.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Nasar, A.M. Eulerian and Lagrangian Smoothed Particle Hydrodynamics as Models for the Interaction of Fluids and Flexible Structures in Biomedical Flows; The University of Manchester: Manchester, UK, 2016. [Google Scholar]
- Gingold, R.A.; Monaghan, J.J. Smoothed particle hydrodynamics: Theory and application to non-spherical stars. Mon. Not. R. Astron. Soc. 1977, 181, 375–389. [Google Scholar] [CrossRef]
- Lin, J.; Naceur, H.; Coutellier, D.; Laksimi, A. Efficient meshless SPH method for the numerical modeling of thick shell structures undergoing large deformations. Int. J. Non-Linear Mech. 2014, 65, 1–13. [Google Scholar] [CrossRef]
- Liu, M.; Liu, G. Smoothed particle hydrodynamics (SPH): An overview and recent developments. Arch. Comput. Methods Eng. 2010, 17, 25–76. [Google Scholar] [CrossRef] [Green Version]
- Iglesias, A.S.; Rojas, L.P.; Rodríguez, R.Z. Simulation of anti-roll tanks and sloshing type problems with smoothed particle hydrodynamics. Ocean Eng. 2004, 31, 1169–1192. [Google Scholar] [CrossRef]
- Souto-Iglesias, A.; Delorme, L.; Pérez-Rojas, L.; Abril-Pérez, S. Liquid moment amplitude assessment in sloshing type problems with smooth particle hydrodynamics. Ocean Eng. 2006, 33, 1462–1484. [Google Scholar] [CrossRef]
- Chen, Z.; Zong, Z.; Liu, M.; Li, H. A comparative study of truly incompressible and weakly compressible SPH methods for free surface incompressible flows. Int. J. Numer. Methods Fluids 2013, 73, 813–829. [Google Scholar] [CrossRef] [Green Version]
- Monaghan, J.J.; Rafiee, A. A simple SPH algorithm for multi-fluid flow with high density ratios. Int. J. Numer. Methods Fluids 2013, 71, 537–561. [Google Scholar] [CrossRef]
- Dincer, A.E. Investigation of the sloshing behavior due to seismic excitations considering two-way coupling of the fluid and the structure. Water 2019, 11, 2664. [Google Scholar] [CrossRef] [Green Version]
- Trimulyono, A.; Hashimoto, H.; Matsuda, A. Experimental validation of single-and two-phase smoothed particle hydrodynamics on sloshing in a prismatic tank. J. Mar. Sci. Eng. 2019, 7, 247. [Google Scholar] [CrossRef] [Green Version]
- Gabl, R.; Davey, T.; Ingram, D.M. Roll Motion of a Water Filled Floating Cylinder—Additional Experimental Verification. Water 2020, 12, 2219. [Google Scholar] [CrossRef]
- Kocaman, S.; Dal, K. A New Experimental Study and SPH Comparison for the Sequential Dam-Break Problem. J. Mar. Sci. Eng. 2020, 8, 905. [Google Scholar] [CrossRef]
- Tran-Duc, T.; Meylan, M.H.; Thamwattana, N.; Lamichhane, B.P. Wave Interaction and Overwash with a Flexible Plate by Smoothed Particle Hydrodynamics. Water 2020, 12, 3354. [Google Scholar] [CrossRef]
- Qian, L.; Causon, D.M.; Mingham, C.G.; Ingram, D.M. A free-surface capturing method for two fluid flows with moving bodies. Proc. R. Soc. A Math. Phys. Eng. Sci. 2006, 462, 21–42. [Google Scholar] [CrossRef]
- Lee, D.; Kim, M.; Kwon, S.; Kim, J.; Lee, Y. A parametric sensitivity study on LNG tank sloshing loads by numerical simulations. Ocean Eng. 2007, 34, 3–9. [Google Scholar] [CrossRef]
- Chen, Z.; Zong, Z.; Li, H.; Li, J. An investigation into the pressure on solid walls in 2D sloshing using SPH method. Ocean Eng. 2013, 59, 129–141. [Google Scholar] [CrossRef]
- Fourtakas, G.; Dominguez, J.M.; Vacondio, R.; Rogers, B.D. Local uniform stencil (LUST) boundary condition for arbitrary 3-D boundaries in parallel smoothed particle hydrodynamics (SPH) models. Comput. Fluids 2019, 190, 346–361. [Google Scholar] [CrossRef]
- Monaghan, J.J. Simulating free surface flows with SPH. J. Comput. Phys. 1994, 110, 399–406. [Google Scholar] [CrossRef]
- Kulasegaram, S.; Bonet, J.; Lewis, R.; Profit, M. A variational formulation based contact algorithm for rigid boundaries in two-dimensional SPH applications. Comput. Mech. 2004, 33, 316–325. [Google Scholar] [CrossRef]
- Randles, P.; Libersky, L.D. Smoothed particle hydrodynamics: Some recent improvements and applications. Comput. Methods Appl. Mech. Eng. 1996, 139, 375–408. [Google Scholar] [CrossRef]
- Crespo, A.J.; Gómez-Gesteira, M.; Dalrymple, R.A. Boundary conditions generated by dynamic particles in SPH methods. Comput. Mater. Contin. 2007, 5, 173–184. [Google Scholar]
- Adami, S.; Hu, X.Y.; Adams, N.A. A generalized wall boundary condition for smoothed particle hydrodynamics. J. Comput. Phys. 2012, 231, 7057–7075. [Google Scholar] [CrossRef]
- Shao, J.; Li, H.; Liu, G.; Liu, M. An improved SPH method for modeling liquid sloshing dynamics. Comput. Struct. 2012, 100, 18–26. [Google Scholar] [CrossRef] [Green Version]
- Liu, M.; Shao, J.; Chang, J. On the treatment of solid boundary in smoothed particle hydrodynamics. Sci. China Technol. Sci. 2012, 55, 244–254. [Google Scholar] [CrossRef]
- Cao, X.; Ming, F.; Zhang, A. Sloshing in a rectangular tank based on SPH simulation. Appl. Ocean Res. 2014, 47, 241–254. [Google Scholar] [CrossRef]
- Green, M.D.; Peiró, J. Long duration SPH simulations of sloshing in tanks with a low fill ratio and high stretching. Comput. Fluids 2018, 174, 179–199. [Google Scholar] [CrossRef]
- Crespo, A.; Dominguez, J.; Gómez-Gesteira, M.; Barreiro, A.; Rogers, B. User Guide for DualSPHysics Code; University of Vigo: Vigo, Spain; The University of Manchester: Manchester, UK; Johns Hopkins University: Baltimore, MD, USA, 2011. [Google Scholar]
- Monaghan, J.J. Smoothed particle hydrodynamics. Annu. Rev. Astron. Astrophys. 1992, 30, 543–574. [Google Scholar] [CrossRef]
- Colagrossi, A.; Landrini, M. Numerical simulation of interfacial flows by smoothed particle hydrodynamics. J. Comput. Phys. 2003, 191, 448–475. [Google Scholar] [CrossRef]
- Lind, S.J.; Xu, R.; Stansby, P.K.; Rogers, B.D. Incompressible smoothed particle hydrodynamics for free-surface flows: A generalised diffusion-based algorithm for stability and validations for impulsive flows and propagating waves. J. Comput. Phys. 2012, 231, 1499–1523. [Google Scholar] [CrossRef]
- Skillen, A.; Lind, S.; Stansby, P.K.; Rogers, B.D. Incompressible smoothed particle hydrodynamics (SPH) with reduced temporal noise and generalised Fickian smoothing applied to body–water slam and efficient wave–body interaction. Comput. Methods Appl. Mech. Eng. 2013, 265, 163–173. [Google Scholar] [CrossRef]
- Gomez-Gesteira, M.; Rogers, B.D.; Dalrymple, R.A.; Crespo, A.J. State-of-the-art of classical SPH for free-surface flows. J. Hydraul. Res. 2010, 48, 6–27. [Google Scholar] [CrossRef]
- Pa’ kozdi, C.; Graczyk, M. Validation of an SPH sloshing simulation by experiments. In Proceedings of the 28th International Conference on Ocean, Offshore and Arctic Engineering, Honolulu, HI, USA, 31 May–5 June 2009; pp. 729–739. [Google Scholar]
- Cao, Y.; Graczyk, M.; Pakozdi, C.; Lu, H.; Huang, F.; Yang, C. Sloshing Load Due to Liquid Motion in a Tank Comparison of Potential Flow, CFD, and Experiment Solutions. In Proceedings of the Twentieth International Offshore and Polar Engineering Conference, Beijing, China, 20–25 June 2010. [Google Scholar]
- Benson, D.J.; Ng, W. Validation of Slosh Modeling Approach Using STAR-CCM+. 2018. Available online: https://ntrs.nasa.gov/citations/20180003007 (accessed on 17 November 2021).
- Li, C.B.; Choung, J. Numerical and Experimental Study on Sloshing Impact Loads in IMO Type-C LNG Tanks with Different Swash Bulkheads. In Practical Design of Ships and Other Floating Structures; Springer: Singapore, 2019; pp. 1046–1055. [Google Scholar]
- User Guide. STAR-CCM+ Version (10.02); CD-Adapco: New York, NY, USA, 2015. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cases | ||||
|---|---|---|---|---|
| Case 1 | 0.337 | 0.985 | 1.2971 | 0.0040 |
| Case 2 | 0.173 | 0.970 | 1.6576 | 0.0100 |
| Cases | ||
|---|---|---|
| Case 1 | 0.340 | |
| Case 2 | 0.170 |
| Time | 20 s | 60 s | 100 s | 140 s | |
|---|---|---|---|---|---|
| Cases | |||||
| New boundary method | 2 | 3 | 5 | 5 | |
| Boundary method by Chen | 122 | 352 | 641 | 863 | |
| Boundary method by Shao | 155 | 469 | 744 | 953 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tao, K.; Zhou, X.; Ren, H. A Novel Improved Coupled Dynamic Solid Boundary Treatment for 2D Fluid Sloshing Simulation. J. Mar. Sci. Eng. 2021, 9, 1395. https://doi.org/10.3390/jmse9121395
Tao K, Zhou X, Ren H. A Novel Improved Coupled Dynamic Solid Boundary Treatment for 2D Fluid Sloshing Simulation. Journal of Marine Science and Engineering. 2021; 9(12):1395. https://doi.org/10.3390/jmse9121395
Chicago/Turabian StyleTao, Kaidong, Xueqian Zhou, and Huiolong Ren. 2021. "A Novel Improved Coupled Dynamic Solid Boundary Treatment for 2D Fluid Sloshing Simulation" Journal of Marine Science and Engineering 9, no. 12: 1395. https://doi.org/10.3390/jmse9121395
APA StyleTao, K., Zhou, X., & Ren, H. (2021). A Novel Improved Coupled Dynamic Solid Boundary Treatment for 2D Fluid Sloshing Simulation. Journal of Marine Science and Engineering, 9(12), 1395. https://doi.org/10.3390/jmse9121395