1. Introduction
The continuous monitoring of marine animals has always been considered a hard task. Cetaceans spend most of their lives submerged in the deep sea, emerging primarily only for respiration. Since acoustic methods permit the detection of animals underwater, at night, and in poor weather conditions, passive acoustic observation has been used increasingly often over the last decade to study marine mammal distribution, abundance, and movements, as well as for mitigation of potentially harmful anthropogenic effects. Multiple projects around the world have performed continuous passive acoustic monitoring (PAM) [
1,
2,
3], but rarely do they allow real-time monitoring.
In this review, we will distinguish the autonomous recorders that need a posteriori data recovery (
Section 2) from the real-time acoustic monitoring of cetaceans (
Section 3). The advantage of real-time systems is that they can be dedicated to the protection of cetaceans, as we describe in more detail the two projects in the Ligurian Sea.
The increasing number of cabled submarine infrastructures provides a unique opportunity for high throughput data transmission. In particular, the infrastructure associated with submarine neutrino telescopes hosts acoustic monitoring systems dedicated to the calibration of the detector. This system can also be exploited for passive acoustic cetacean studies, as described in
Section 4.
2. Passive Acoustic Systems without Real-Time Data Transmission
A non-exhaustive list of different approaches for PAM without real-time data transmission is provided below. In the Baltic Sea, the LIFE+ NATURA 2000 project SAMBAH [
4] used data collected from 304 static acoustic monitoring devices, C-PODs (Cetacean and Porpoise Detectors, Chelonia Ltd), between May 2011 and April 2013 to study the seasonal distribution of harbour porpoise (
Phocoena phocoena). This system, however, required retrieval of the detector units every 3–6 days for data downloading and battery replacement. The data described the properties of tonal signals, including the time and duration of echolocation signals.
C-PODs have also been used in Ireland to study the Shannon dolphins between May and November 2013 (five C-PODs have been deployed in different sites to record more than 6963 h of acoustic data) [
5] and in Canada, where seven C-PODs have been used in 2011 and 2012 to investigate the presence of harbour porpoise and white-sided dolphins (
Lagenorhynchus obliquidens) in the Minas passage (collecting 1342 days of data) [
6].
Another shallow water system has been used in southern China, where an array of seven PAM platforms were installed on the ocean floor at depths of 10–20 m. Each platform consisted of a frame supporting a concrete weight and stainless-steel tubes that protected the hydrophone inside the structure. In the winter of 2018, this system was used to study the Indo-Pacific humpback dolphin (
Sousa chinensis), recording around 1600 h of waveform acoustic data [
7].
In California, a Drifting Acoustic Spar Buoy Recorders (or DASBRs) and autonomous PAM systems have been used to study sperm whales (
Physeter macrocephalus) and beaked whales (
Ziphiidae), during the fall of 2014 [
8]. These apparatuses consist of a free-floating buoy with an array of two hydrophones separated by 2 m, and suspended 100 m below the buoy. The data are recorded on a flash memory. In each deployment, the buoys were retrieved after a couple of days.
In the Southern Atlantic Ocean, an ocean-wave-propelled autonomous surface vehicle wave gliders equipped with a towed hydrophone and recording system was used to collect acoustic data between 6 and 25 February 2016 [
9]. In such a short time, the system travelled for 750 km, and it detected 165,130 high-frequency signals in 31 encounters, including 1789 whistles, 389 burst-pulse sounds, and 162,952 echolocation clicks.
In the next section, we will focus on several real-time or near-real-time passive acoustic systems. The advantage of these systems is the possibility to take prompt action in case of a cetacean detection, i.e., implementing a system for the protection of the animals.
3. Passive Acoustic Systems with Real-Time Data Transmission
A near-real-time acoustic monitoring of cetaceans was performed off the west coast of the Island of Hawaii in 2009 using a remotely operated glider, which was equipped with a single hydrophone. The glider repeatedly dove to 1000 m depth and then ascended to the surface again. The glider reported the detection of cetacean signals back to shore via satellite while surfacing in between the dives [
10]. The instrument covered approximately 390 km in a 3-week campaign and collected a total of 194 h of acoustic data. The post-processing of data revealed a high number of vocalisations of delphinids and sperm whales, but the system also successfully reported near-real-time alerts of the presence of beaked whales.
As another example of near-real-time monitoring, there is the system implemented between 2017 and 2019 in Scotland in the Gills Bay Port, where tidal energy generators turbines were active [
11]. Twelve hydrophones arranged in three small tetrahedral clusters were deployed on an operational commercial-scale tidal turbine. The system was semi-automatic, with real-time data transmission and cetacean detection, but operator screening of remaining sounds was required to select and confirm detections from the stored data. The system has been used to evaluate the frequency of collision of cetaceans and the turbine and to provide high-resolution tracking data for animals close to the turbine.
One rare example of real-time acoustic monitoring of cetaceans is the Marine Cable Hosted Observatory (MACHO) in Taiwan [
12]. The acoustic detection system consists of single hydrophone systems connected to shore with a 45-km-long submarine cable. The hydrophones are placed at a depth of 277 m. The acoustic data are continuously transmitted to the land station in real-time and saved in waveform audio files (WAV) every 30 s. The continuous recording results in 64.5 GB of data per day. In one year of data taking, the system identified seven different species of cetaceans, and different patterns of seasonal occurrence were revealed thanks to this data.
In the Mediterranean Sea, offshore Toulon, a small nonuniform array of five hydrophones mounted directly under an autonomous surface vehicle was operated [
13]. The vehicle was 17 m long, and it hosted four hydrophones at a depth of −2 m, spaced 35–70 cm apart, while one hydrophone was at a depth of −0.2 m and 7 m apart from the others. This detector operated for 2 h in August 2018, and it demonstrated that cetaceans can be real-time tracked precisely in 3D using a moving near-surface hydrophone array. The system managed to reconstruct 3D tracks describing the behaviour of the cetacean in the abyss (−1.2 km), at one position per second. This high resolution allowed the observation of a correlation between the repetition rate of the predator’s biosonar and the tortuosity of its track.
In the same area, also operates the BOMBYX project [
14]. In particular, the second implementation of the project employs a floatability variation system, which allows for both 20 m deep recording and surface wireless data transmission, for an estimated battery life of 6 months. This system, which houses five hydrophones, can deliver real-time alerts for sperm whale and fin whale (
Balaenoptera physalus) presence, reducing the collision risks via speed regulation or course modification.
In addition to the detectors in the Mediterranean Sea described below, we should mention the OBSEA observatory, which operates 4 km off the Vilanova i la Geltru coast in Spain [
15]. The observatory monitors the temperature, conductivity, pressure, salinity, and speed of sound of seawater in real-time via an optical Ethernet link. The detector also houses a hydrophone that provides real-time measurement of the environmental acoustic background.
Below, we will focus on two European LIFE projects dedicated to the protection of cetaceans through passive acoustic monitoring. The ARION project was focused on bottlenose dolphins in the Portofino Marine Protected Area, while WHALESAFE aimed to protect sperm whales in an area with high maritime traffic, the port of Savona Vado. Both projects were aimed to acoustically track the position of the animals and then send the positions in real-time to the Coast Guard in order to avoid possible interference between vessels and cetaceans.
3.1. ARION
From 2010 to 2015, the EU Life+ project LIFE09 NAT/IT/000190 ARION operated in the Portofino Marine Protected Area. Its objective was to protect the transient and resident population of bottlenose dolphins (
Tursiops truncatus) present in the area [
16].
The system was able to detect the simultaneous presence of boats and vessels in order to generate alert messages that were transmitted to all interested parties (tourists, professional fishermen). The detector had two separate acoustic units located about 1 km off the Portofino promontory, each housed four hydrophones.
The single detection unit consists of a special type of floating marine structure, called an elastic beacon, moored to the sea bottom and powered by solar energy. At the top of each beacon, there was a control tower housing a watertight box containing all the electronic devices dedicated to the digitalisation of acoustic signals, the radio link with the shore station and the acquisition of auxiliary parameters needed for the tracking algorithms.
The total length of the beacon was 30 m, of which 7 m emerged. At the lower end, the structure was connected to a 60 m long anti-twisting steel wire terminating in a 30 t mooring element. The floating element was placed 6 m below sea level and provided the upward thrust to maintain tension over the whole structure and a high degree of stability even during swells. The four hydrophones are placed at a depth of 20 m as on the vertices of a tetrahedron, each pair of hydrophones is spaced 5 m apart, and the vertical distance of the two pairs is 5 m. Omnidirectional CO.L.MAR (
https://www.colmaritalia.it, accessed on 1 November 2021). GP0280-M hydrophones were chosen with a reception sensitivity of −169 dB re 1 V/μPa (−3 dB: 740 to 68 kHz).
The system was connected in real-time with the shore station via a radio link so that an alert could be sent to Coast Guard in the event of the simultaneous presence of animals and boats in one of the sectors into which the study area was divided. The Coast Guard, in turn, notified the vessels in the area to follow the protocol of conduct defined to reduce risks.
During the operation time (May 2013–September 2015) the ARION project archived 1452 min of recording with bottlenose dolphin whistles and demonstrated that the system can localise the cetaceans with a precision of approximately 3% at the maximum detection range (3700 m). Similarly, the system has also successfully monitored the route of vessels in the area, demonstrating the ability to issue alerts in order to protect endangered animals. There were 1877 alarms for the presence of dolphins generated during the duration of the project. The presence of bottlenose dolphins presented seasonal variations. Many individuals were observed during spring, while the presence is dramatically reduced during summer when the boat traffic is particularly intense. The study showed a high frequency of detections between the late afternoon and early morning, particularly in the sectors closer to the coast [
17].
3.2. WHALESAFE
The LIFE13 NAT/IT/001061 NATURA 2000 project WHALESAFE operated in the Ligurian Sea near the port of Savona-Vado from 2014 to 2020 [
18]. Similar to the ARION project, WHALESAFE aimed to monitor cetaceans in the area, in this case, sperm whales, so that alerts could be sent if a vessel was on a collision route with an animal at the surface during its breathing phase.
Initially, the project involved two detection units, each consisting of two buoys. The primary buoy housed the instrumentation dedicated to power and analysing the signals and transmiting them ashore, while the secondary buoy housed two pairs of hydrophones located at a depth of approximately 65 m and the instrumentation dedicated to digitising the acoustic signals. The hydrophones (GP0280-M produced by COLMAR 2.7–90 kHz, sensitivity 69 dB re V/μPa on single output @ 5 kHz) were fixed on a tetrahedral mechanical frame, the distance between each pair of hydrophones was 4 m, and the vertical spacing was also 4 m.
The data were transmitted to the ground via a Wifi bridge (signal strength of −57 dBm with transmission and reception rates up to 100 Mbps). At the ground station, the sperm whale’s vocalisations, known as clicks, were analysed in order to reconstruct their direction of origin and thus the position of their source. The system was reconstructing the sperm whale’s trajectory in real-time to predict its surfacing coordinates early enough to send an alert signal to the Coast Guard to warn vessels on a collision course.
During its first test campaign, the system was damaged by vessels cutting the cable connecting the primary buoy to the secondary buoy, despite the fact that navigation was prohibited in the proximity of the detector. For this reason, the system was modified using a single “primary” buoy where the structure with the four hydrophones was directly installed. This new system configuration compensated for the lack of a twin detector by exploiting the reflection of the sound waves on the sea surface. In this way, it was possible to triangulate the source by exploiting the direct acoustic signal and the signal reflected from the sea surface. The possibility of operating the system in this configuration had already been demonstrated during the first test campaign of the WHALESAFE project, where the results of triangulation using two twin systems or a single system (using the reflected signals) gave comparable results [
18].
The system was active during the summer–autumn season for a total of 177 days over a three-year period. During this period, the presence of sperm whales was recorded on five separate days, with an average of 1 sperm whale per month. More than 5000 sperm whale clicks were recorded, allowing the complete reconstruction of four dives [
19]. Unfortunately, the storm surge on 29 October 2018 completely destroyed the system when it was retired in the Savona-Vado harbour and the project activities were suspended.
4. Real-Time Passive Acoustic Monitoring of Cetaceans with Submarine Neutrino Telescope Infrastructures
Submarine neutrino telescopes are installed at significant sea depths (over 2000 m). They consist of several detection lines anchored to the seabed and held in a vertical position by buoys. Numerous single-photon sensitive light radiation detectors (phototubes) are distributed along these detection lines.
The mechanism of neutrino detection involves the interaction of the neutrino in the vicinity of the detector with the subsequent production of one or more charged particles. These particles typically move faster than light in water, thus inducing the emission of a faint Cherenkov light radiation that can be detected by the detector phototubes. The measurement of this radiation allows the trajectory of the incoming neutrino to be reconstructed and the detector to be used as a telescope.
Detector lines are typically not rigid, so they are free to move due to sea currents. For this reason, neutrino telescopes are equipped with a system of acoustic emitters and receivers that are used to triangulate the position of the various detector components. The used hydrophones also record ambient sounds from the deep sea, so they can be used to monitor cetaceans. In addition, the interaction of neutrinos produces an acoustic wave in the frequency range of 10 to 100 kHz, which propagates for kilometres, so acoustic receivers are also used to study neutrinos.
The neutrino telescopes are connected to the shore in real-time by electro-optical cable, which transmits the signals recorded by both the phototubes and the acoustic sensors in real-time. In this way, cetacean monitoring can be carried out in real-time. In this section, we will briefly describe the studies that have been carried out by several neutrino telescopes in the Mediterranean.
4.1. ANTARES
The ANTARES telescope [
20] is located 40 km off the coast of Toulon in France (42°48′ N, 6°10′ E) at a depth of 2475 m; it has collected data since 2007. The detector consists of a three-dimensional grid of optical modules (OMs) and pressure resistant glass spheres, each containing one 10″ photomultiplier tube (PMT). The OMs are arranged in triplets, forming a storey, along twelve vertical lines, for a total of 885 OMs. The lines are anchored to the seabed and held in a vertical position by a buoy at the top; the total length of the strings is 450 m with the storeys spaced 14.5 m apart, while the distance between the strings varies from 65 to 70 m. A positioning system comprising hydrophones, compasses, and tiltmeters is used to monitor the detector geometry.
The detector also includes a dedicated network of acoustic sensors called AMADEUS [
21]. The hydrophones are distributed in two lines with distances of 200 m horizontally and ranging from 10 to 100 m vertically. The system is able to reconstruct the position of a point-like sound source in the frequency range from 1 to 125 kHz. The sampling rate is 250 kHz, hydrophone sensitivity −170 dB re 1 V/μPa, gain 10 dB, and quantisation +2 V.
Once transferred onshore, acoustic data are analysed with a dedicated algorithm. The cetacean signal classification modules are part of a larger system [
22], which includes impulse and short tonal sound detectors and classifiers applied to several frequency bands covering the whole bandwidth of the data. The modules work on segments of ∼16.8 s with a sampling rate of 250 kHz.
One of the most import important cetacean studies of the ANTARES collaboration has been the estimation of the presence of sperm whales in the Ligurian Sea and the study of the influence of anthropic noise on the foraging behaviour of the sperm whales [
23]. Two years of continuous data taking (2011–2012) were automatically processed in real-time to detect sperm whale vocalisations. The analysis concluded that sperm whales are more often present at daylight hours independently of shipping appearance.
4.2. NEMO-OνDE and Subsequent Projects
The NEMO (NEutrino Mediterranean Observatory) collaboration [
24] installed, 25 km offshore of Catania (Sicily) at a 2000 m depth, an underwater laboratory to perform long-term tests of prototypes and new technologies for an underwater high energy neutrino km
3-scale detector in the Mediterranean Sea. In order to measure the level of acoustic noise in the deep Mediterranean Sea, the NEMO Collaboration has constructed and operated the experimental station O
DE (Ocean noise Detection Experiment) from January 2005 to November 2006 with a duty cycle of 5 min/hour. The O
DE detector consists of four large-bandwidth (5–90 kHz) hydrophones placed on the vertex of a tetrahedron (1 m size), and it was connected to shore with an electro-optical cable. The recorded data have been fundamental for studies on sperm whales, measuring the Inter Pulse Interval (IPI) [
25] it was noted that the size category most represented was from 9 to 12 m (adult females or juvenile males) and specimens longer than 14 m (old males) seemed to be absent [
26]. Furthermore, the Delphinidae activity over multiple temporal scales has been studied through the detection of their echolocation clicks. The activity of dolphins was mostly confined to nighttime and crepuscular hours, in contrast with communicative signals (whistles), while seasonal variation was also evident [
27].
In 2012 an array of four hydrophones (O
DE-2) was installed at the same location of NEMO-O
DE, and it has been fully operative since 2017. Compared to its predecessor, the data transmission system to shore has been fully dispatching signals through TCP/IP protocol to a computer farm to be continuously analysed in real-time. Moreover, thanks to the direct optical fibre high-speed connection from deep-sea to an Italian computing network, it is possible to perform the online analysis of the acoustic data stream by machines spread all over the world. Raw data are also saved in storage with a duty cycle of 5 min per hour for further offline analysis [
28].
O
DE-2 has been a test-bench for the SMO (Submarine Multidisciplinary Observatory) project [
29]. This successor consisted of a 3D array of 14 large bandwidth acoustic sensors installed onboard the Cherenkov neutrino detector prototype NEMO—Phase II. The system was deployed southeast of Sicily, off Capo Passero, at a distance of about 100 km from the coast. The depth of 3500 m required the development of a special type of hydrophone that maintained optimum performance down to depths of about 4000 m. The acoustic data were analysed in real-time for the position calibration measurements of the neutrino telescope, while 5 min of raw data were stored on hard disks and saved in a digital library for offline studies from March 2013 to August 2014.
Finally, NEMO-SN1 [
30], the first node of EMSO (European Multidisciplinary Seafloor Observatory) [
31] located at a site close to that of NEMO-O
DE, was completed in 2012. The system was composed of an array of four large-bandwidth hydrophones of the same model used in SMO and O
DE 2 projects. The acquired signals are sampled offshore by a commercial four-channel audio analogue-to-digital converter and time-stamped onshore by a dedicated electronic board. The detector allowed the study of the presence of fin whales in the Gulf of Catania. About 7000 h of acoustic recordings have been investigated through spectrograms analysis, and the typical Mediterranean fin whale (
Balaenoptera physalus) calls were detected in different months of the year [
32]. Sperm whales have also been detected. The comparison of the sperm whale data with the results of NEMO-O
DE showed a clear decrease, from 2005 to 2006 to 2012, in the acoustic presence of sperm whales [
33].
4.3. KM3NeT
All the projects described in the previous section can be considered preliminary actions of the KM3NeT (The Cubic Kilometre Neutrino Telescope) [
34]. The KM3NeT collaboration, which includes former ANTARES and NEMO collaborators, is building the largest undersea neutrino telescope in the world: the detector will consist of three building blocks, each with 115 Detection Units (DUs). Two blocks will be located off Capo Passero in Sicily at the SMO site (3500 m depth), while one block will be in front of Toulon near the ANTARES site (2500 m depth). Each detection unit has 18 Digital Optical Modules (DOMs) in which 31 photomultiplier tubes are housed.
The KM3NeT detectors are connected to shore through electro-optical cables allowing a continuous real-time data collection. Similarly to ANTARES, the flexible detection lines requires an appropriate calibration system to reconstruct the position of the various detector components. The Relative Acoustic Positioning System (RAPS) is composed of at least three emitters (Acoustic Beacons), positioned around the detector and emitting 20–50 KHz signal patterns, a hydrophone placed on the base of each DU, and a piezoelectric sensor placed on the bottom hemisphere of each DOM.
The KM3NeT piezoelectric sensors have a sensitivity of −160 ± 6 dB re 1 V/μPa at 50 kHz with ±3 dB variation in the range 10–70 kHz, while the hydrophones (DG0330) are produced by Colmar s.r.l. and consist of a spherical piezo-ceramic element, read-out by an analogue board with two gain options (+46 dB and +26 dB). The audio stream is sampled from a commercial 24-bit stereo ADC and converted to the AES (Advanced Encryption Standard) protocol using a Digital Interface Transmitter (DIT). The sampling rate of the device is 195.3 kHz, while the sensitivity of the hydrophones is −173 re 1V/μPa.
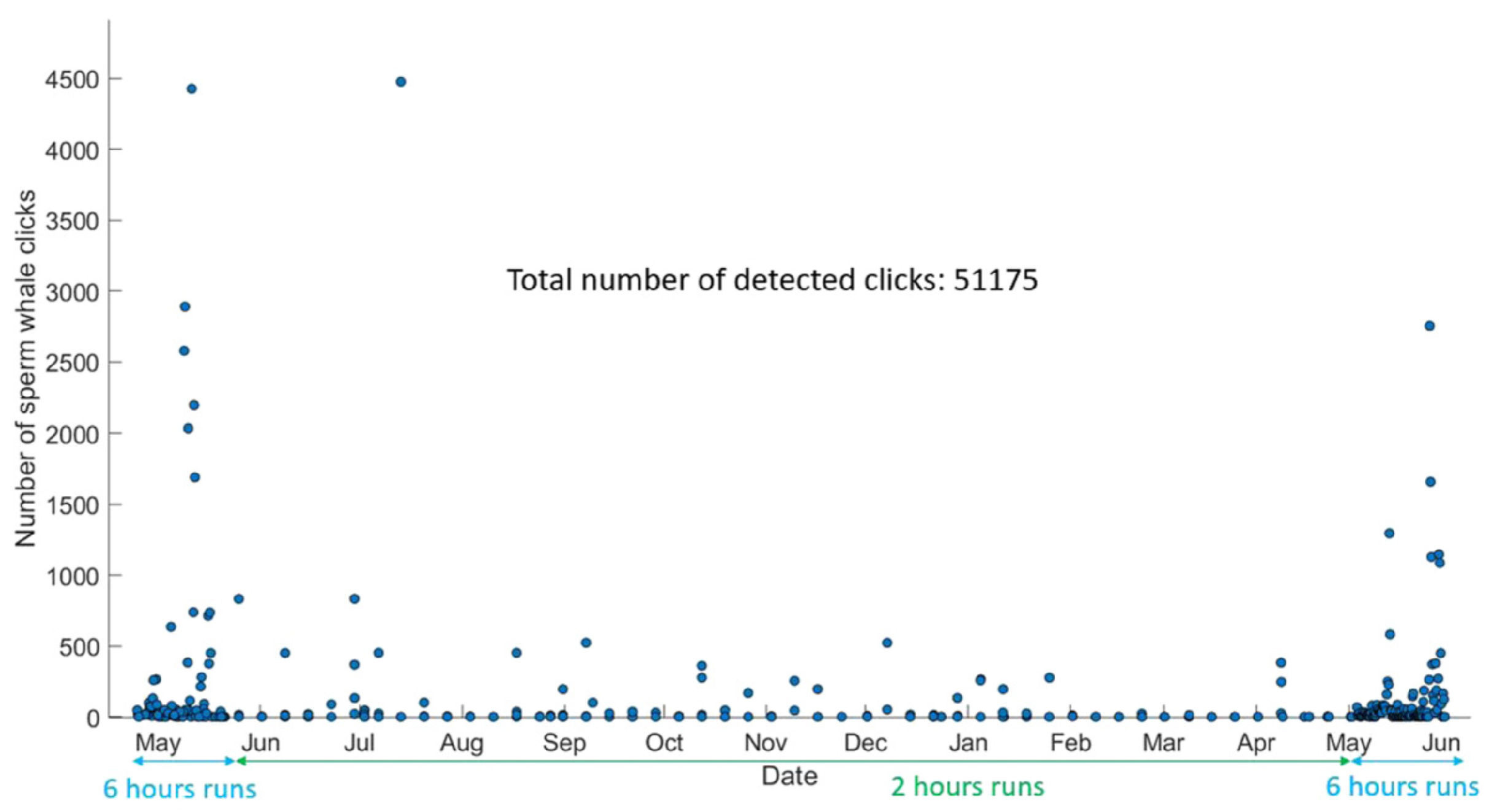
The building blocks are currently under construction (eight strings in the Italian site, six in the French site), but despite the still limited number of acoustic detectors, the first studies concerning the monitoring of cetaceans have already been carried out. A click identifier algorithm has been developed and tested to distinguish clicks of Delphinidae from clicks of sperm whales. The algorithm analyses the characteristic parameters of the signals, such as the Inter Click Interval (ICI), the frequency range, and the duration/form of the signal [
35].
For example, in
Figure 1 the number of sperm whale clicks is shown as a function of time between the middle of April 2020 and the end of June 2021 [
35].
Preliminary tests of the cetacean tracking have also been performed. Due to the reduced number of operational hydrophones (which are clearly more sensitive than piezoelectric sensors), the reconstructed position of the animal is not yet accurate enough to obtain a clear trajectory; however, as demonstrated with dedicated simulation, a detector with 17 hydrophones can reach an accuracy better than 5% for distances below 5 km [
36].
5. Conclusions
The study of cetaceans through real-time passive acoustic monitoring methods is an interesting prospect that will certainly have further developments in the years to come. In addition to the obvious advantages of passive monitoring (e.g., no interference with animal behaviour, long-range, and underwater tracking), the continuous transmission of signals maximises the duty cycle of the device (important to have a consistent sample for scientific analysis), while the possibility to analyse data in real-time gives the opportunity of interference avoidances between animals and human activities.
Recent practice shows that unattended near-surface detectors can be damaged by inappropriate human behaviour, such as in the case of WHALESAFE where navigation in a restricted area damaged more than half of the detector equipment. More compact systems that minimise the lateral extension of the detector, such as the new WHALESAFE configuration, are certainly a better option for reducing this type of risk.
Detectors anchored to the seabed are certainly less prone to this type of problem, but it is much more complex to transmit data to land in real-time. In this case, radio or Wifi systems cannot be used for equipment placed on the surface, so the only possibility is to connect the system to the shore with a submarine cable. This option is undoubtedly much more expensive and is not feasible for smaller experiments, but it is possible to use existing and future cabled deep water sites, as in the case of submarine telescopes. In this way, a network of acoustic detectors can be obtained at a much lower cost.
Multi-disciplinary apparatuses in which the same experiment pursues research in wide-ranging scientific topics will become increasingly popular in the coming decades. We have already the example of the NEPTUNE Ocean Observatory in Canada [
37], which, since 2007, operates the world’s first regional-scale underwater ocean observatory hosting multiple deep-water experiments, and it is also designed to host the future neutrino telescope P-ONE. In addition to keeping costs down, this approach allows positive contamination between different fields that can share their scientific and technological expertise to pursue their research goals together.
A disadvantage of the real-time acoustic monitoring systems is that they are generally fixed at a specific location, so they are not suitable for exceptional animal sightings in unusual areas, such as the stay of a pod of killer whales (
Orcinus orca) in the port of Genova Prà in December 2019 [
38,
39]. In this case, it is more efficient to use mobile systems that allow real-time measurements for a limited time (towed hydrophones and wave gliders) or those that do not allow real-time monitoring (bottom recorders).
In conclusionm the growing number of cabled underwater infrastructures will provide the best long term passive acoustic monitoring in several locations of the Earth. In order to increase the area covered by the passive monitoring systems, the non-cabled autonomous systems provide more feasible solutions. Such systems equipped with wireless data transmission can be integrated into the framework of human interference avoidance systems aimed at the protection of marine mammals.


{kind=link}
