
Pilot-Assisted OFDM for Underwater Acoustic Communication


Abstract
:1. Introduction
2. State of the Art Research
2.1. Pilot-Based Channel Estimation
2.2. Linear Equalization
3. System Architecture
3.1. Pilot-Based Channel Estimation
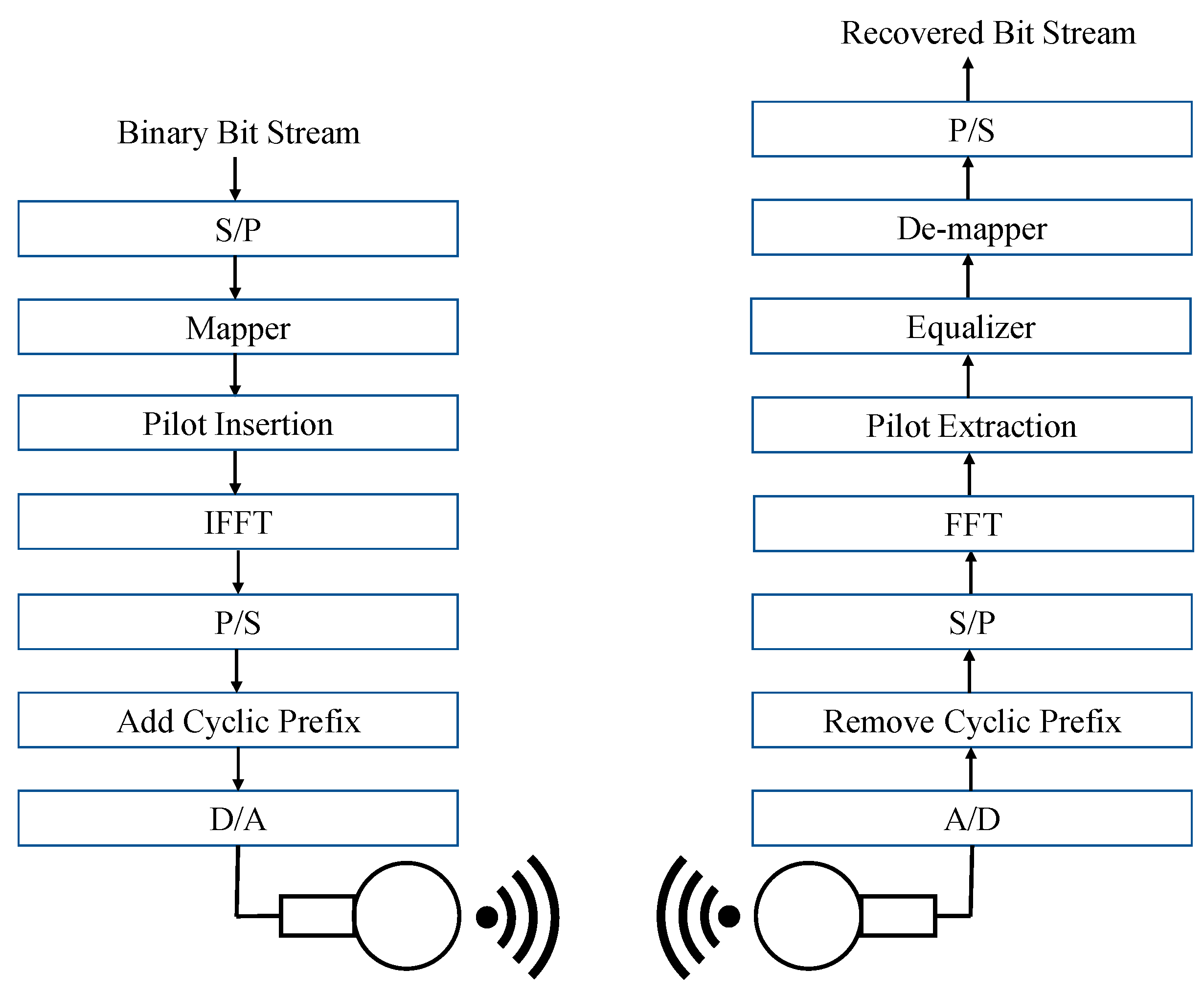
3.1.1. OFDM Transceiver
3.1.2. Least Squares Channel Estimation
- -
- be the set of those subcarriers that carry the pilots;
- -
- be the signal on th subcarrier after the extraction of pilots;
- -
- be the pilot symbol with ;
- -
- be the channel transfer function for th subcarrier of the th OFDM symbol;
- -
- be the AWGN on the th subcarrier;
- -
- be the transmit power of the pilot symbol.
3.2. Linear Equalization
3.2.1. Least Squares (LS)
3.2.2. Zero Forcing (ZF)
4. Shallow Underwater Acoustic Channel Model
4.1. Deterministic Response
4.2. Random Channel
4.3. Ambient Noise
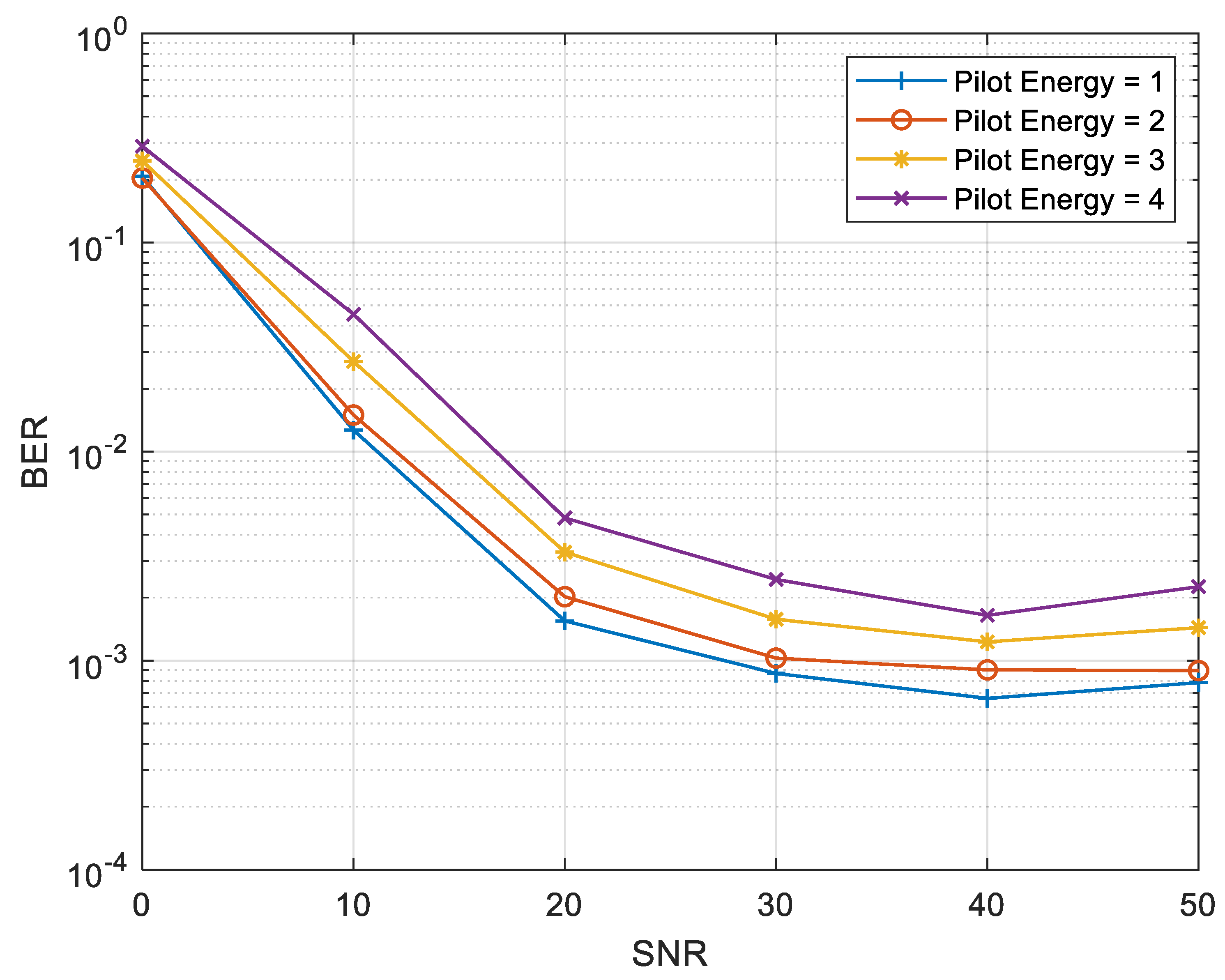
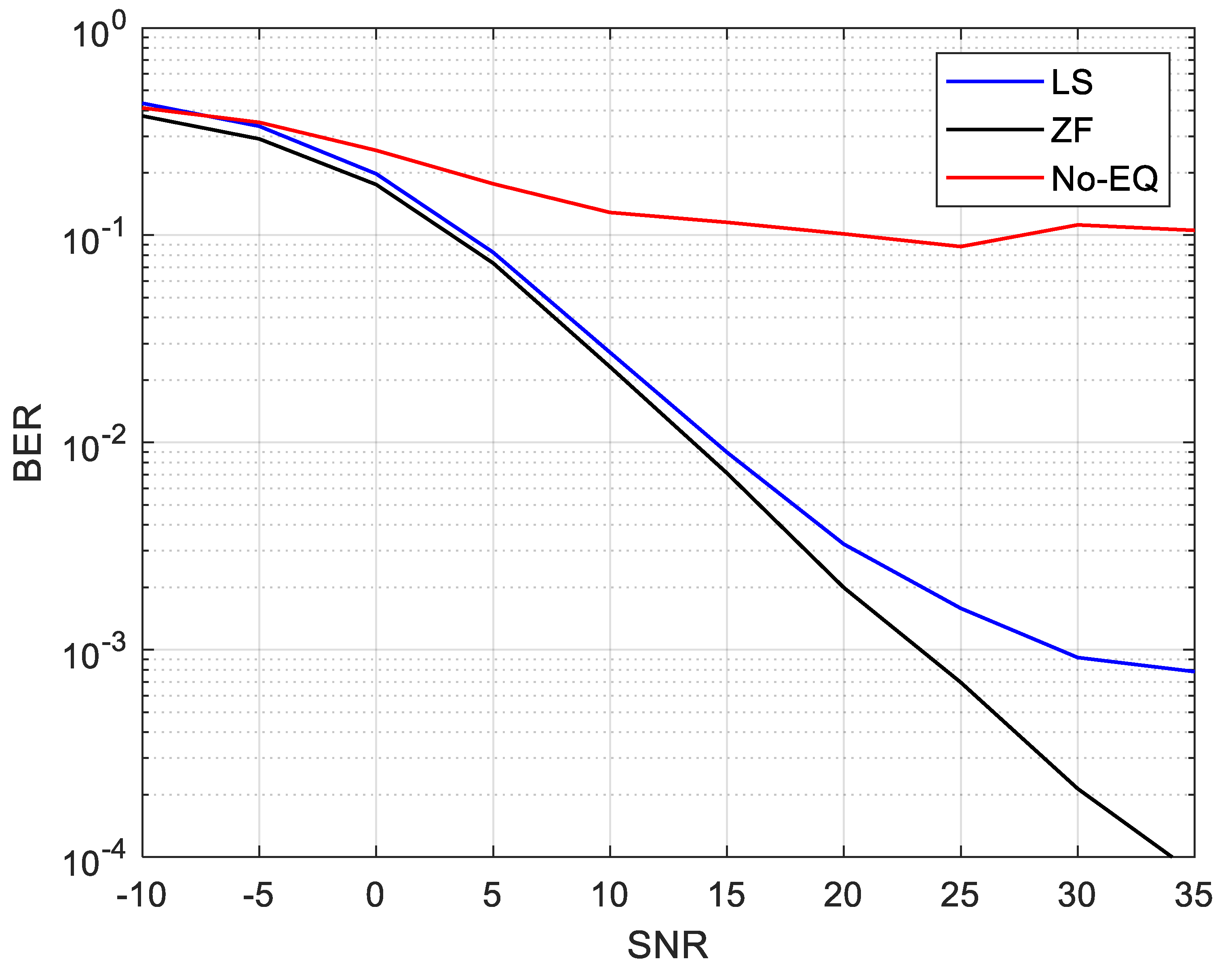
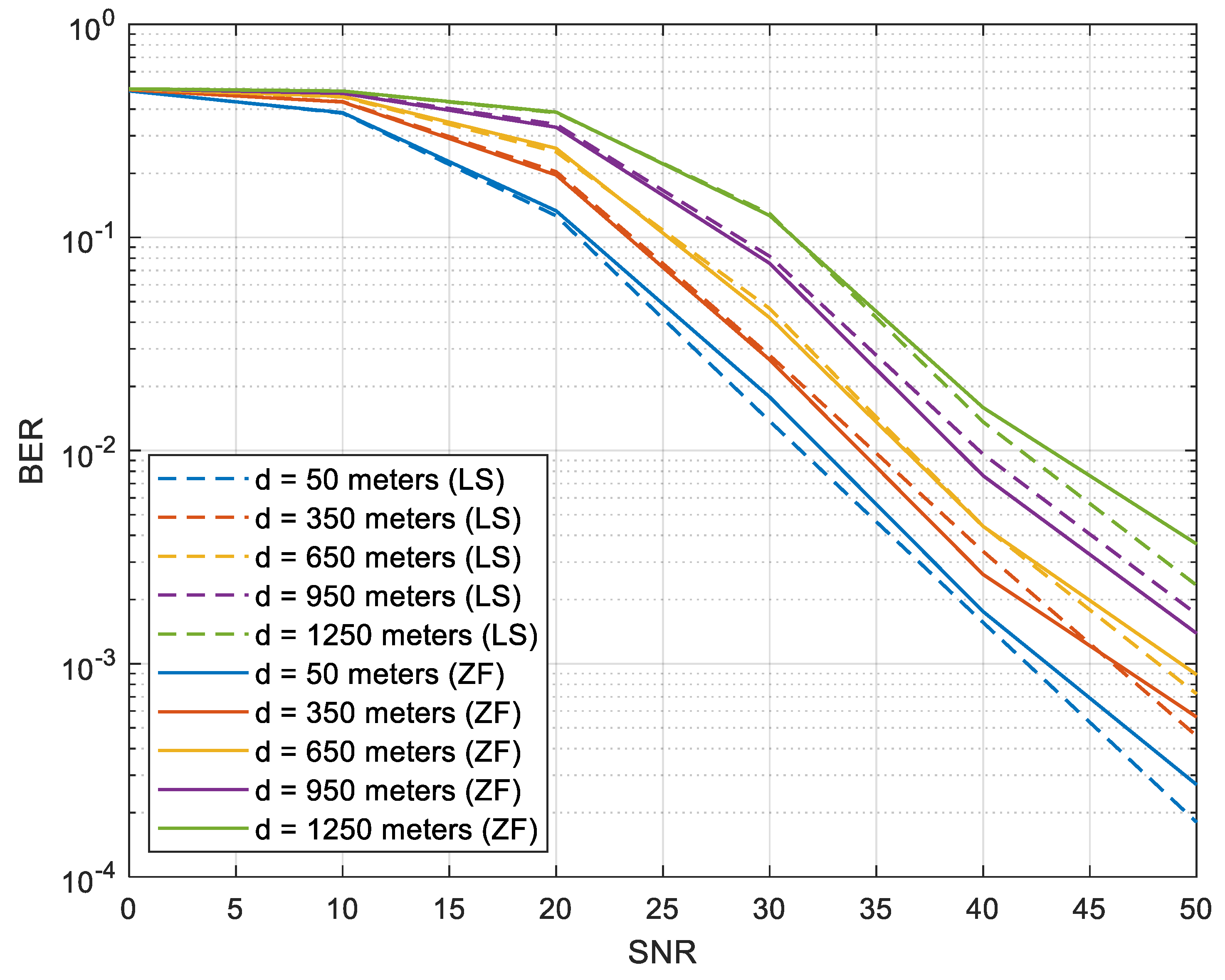
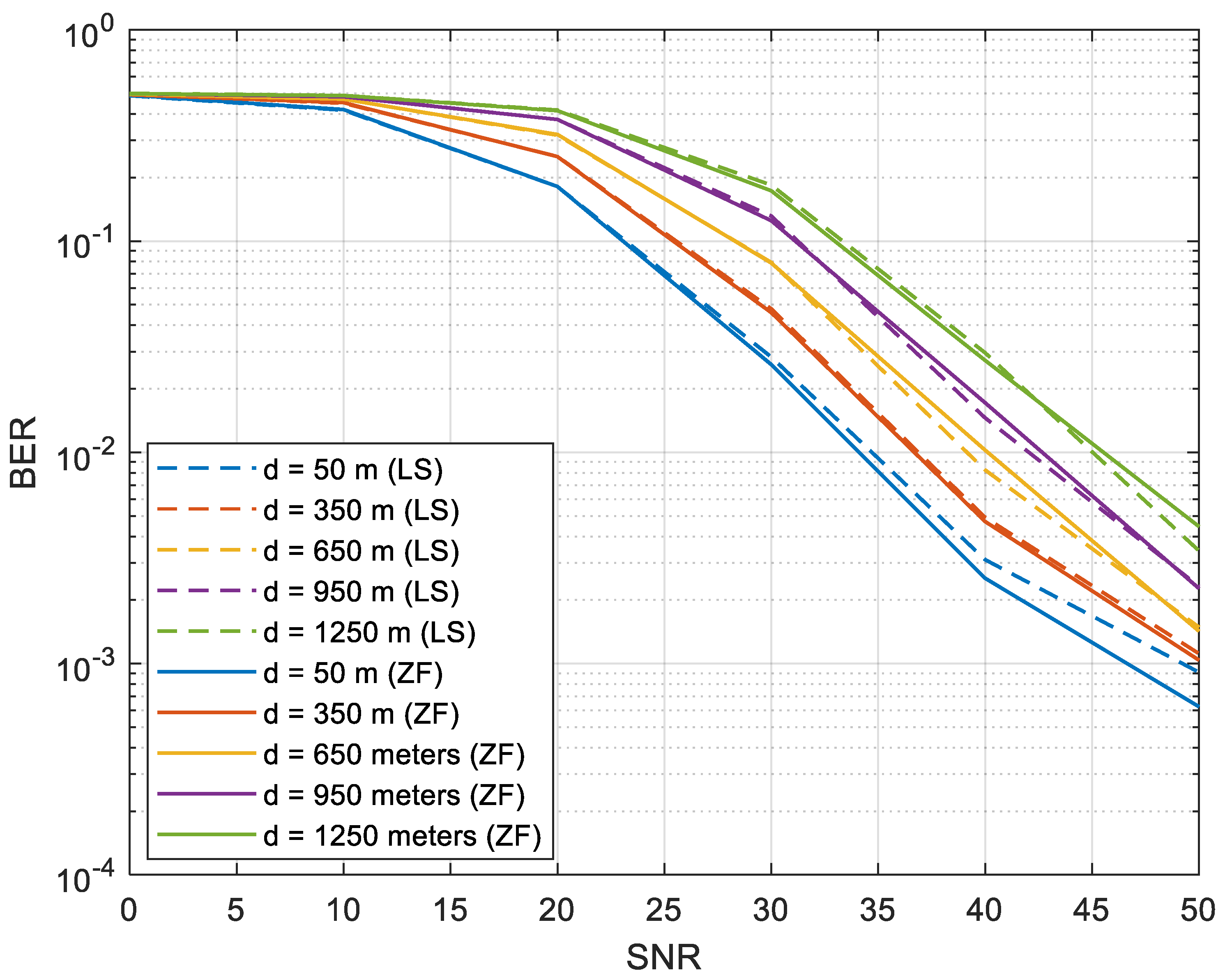
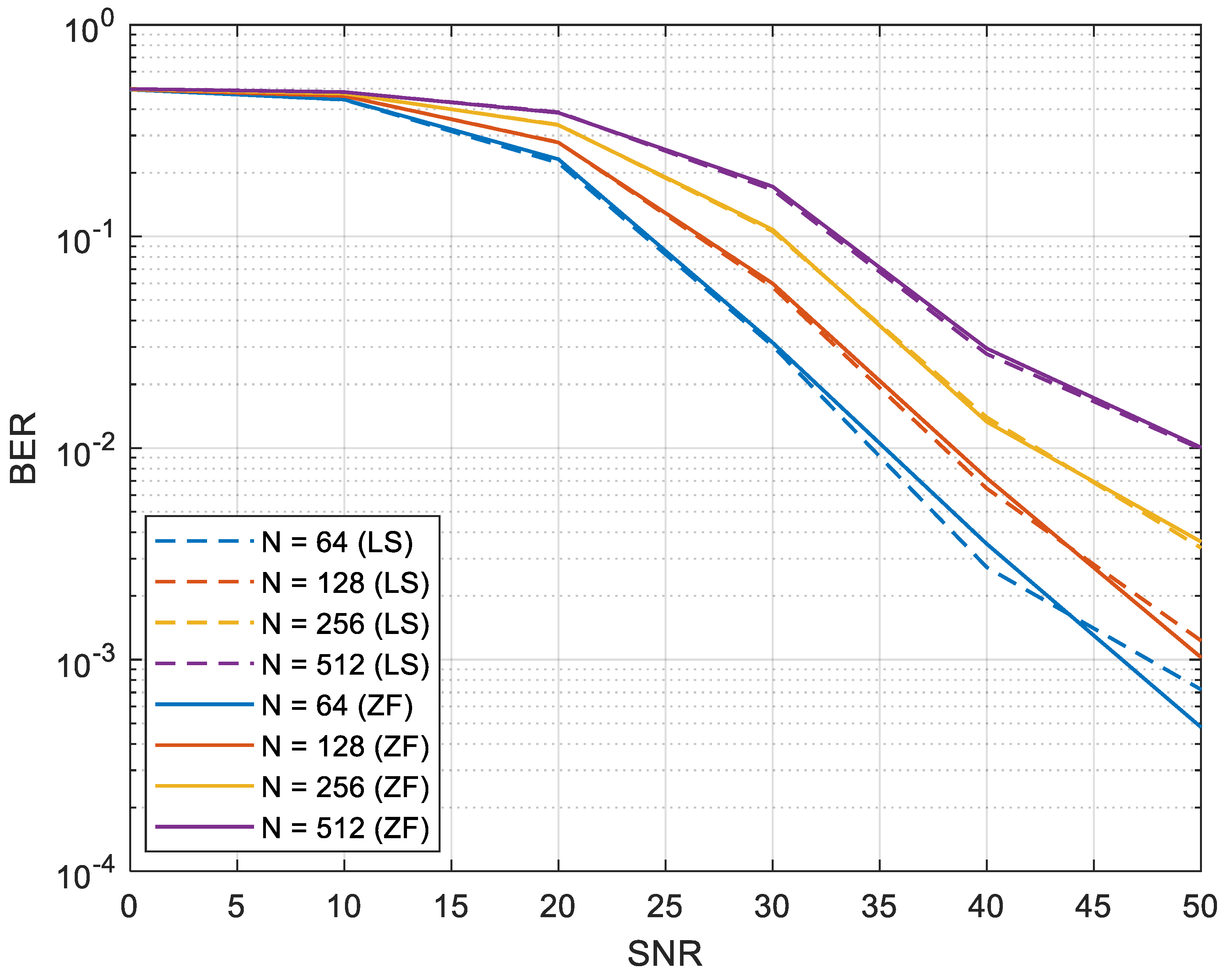
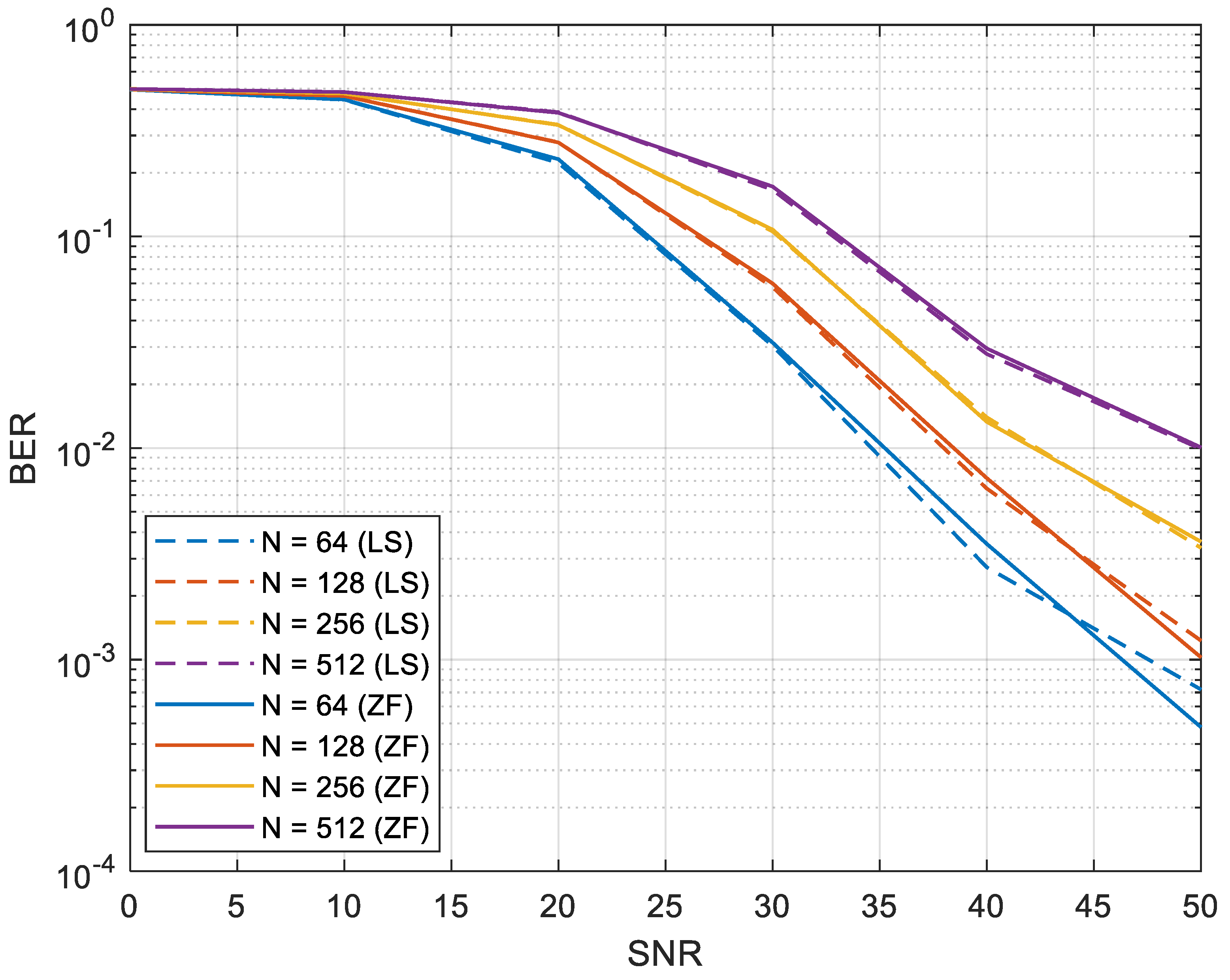
5. Simulation Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Liu, C.; Zakharov, Y.V.; Chen, T. Doubly Selective Underwater Acoustic Channel Model for a Moving Transmitter/Receiver. IEEE Trans. Veh. Technol. 2012, 61, 938–950. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Pompili, D.; Melodia, T. Challenges for efficient communication in underwater acoustic sensor networks. ACM Sigbed Rev. 2004, 1, 3–8. [Google Scholar] [CrossRef]
- Chitre, M.; Shahabudeen, S.; Freitag, L.; Stojanovic, M. Recent advances in underwater acoustic communications & networking. In Proceedings of the IEEE OCEANS, Quebec City, QC, Canada, 15–18 September 2008; pp. 1–10. [Google Scholar]
- Khlifi, A.; Bouallegue, R. Performance analysis of LS and LMMSE channel estimation techniques for LTE downlink systems. arXiv 2011, arXiv:1111.1666. [Google Scholar] [CrossRef]
- Wang, X.; Wang, J.; He, L.; Song, J. Doubly selective underwater acoustic channel estimation with basis expansion model. In Proceedings of the 2017 IEEE International Conference on Communications (ICC), Paris, France, 21–25 May 2017; pp. 1–6. [Google Scholar]
- Schniter, P. Low-complexity equalization of OFDM in doubly selective channels. IEEE Trans. Signal Process. 2004, 52, 1002–1011. [Google Scholar] [CrossRef]
- Van De Beek, J.-J.; Edfors, O.; Sandell, M.; Wilson, S.K.; Borjesson, P.O. On channel estimation in OFDM systems. In Proceedings of the 1995 IEEE 45th Vehicular Technology Conference, Countdown to the Wireless Twenty-First Century, Chicago, IL, USA, 25–28 July 1995; pp. 815–819. [Google Scholar]
- Giannakis, G.B.; Tepedelenlioglu, C. Basis expansion models and diversity techniques for blind identification and equalization of time-varying channels. Proc. IEEE 1998, 86, 1969–1986. [Google Scholar] [CrossRef] [Green Version]
- Yang, L.; Tian, R.; Jia, M.; Li, F. A Modified LS Channel Estimation Algorithm for OFDM System in Mountain Wireless Environment. Procedia Eng. 2012, 29, 2732–2736. [Google Scholar] [CrossRef] [Green Version]
- Tiiro, S.; Ylioinas, J.; Myllyla, M.; Juntti, M. Implementation of the least squares channel estimation algorithm for MIMO-OFDM systems. In Proceedings of the International ITG Workshop on Smart Antennas (WSA 2009), Berlin, Germany, 15 November 2009; pp. 16–18. [Google Scholar]
- Mason, S.; Anstett, R.; Anicette, N.; Zhou, S. A broadband underwater acoustic modem implementation using coherent OFDM. In Proceedings of the National Conference for Undergraduate Research (NCUR), Washington, DC, USA, 2007. [Google Scholar]
- Stojanovic, M. Low Complexity OFDM Detector for Underwater Acoustic Channels; IEEE: Piscataway, NJ, USA, 2006. [Google Scholar]
- Stojanovic, M. Adaptive channel estimation for underwater acoustic MIMO OFDM systems. In Proceedings of the 2009 IEEE 13th Digital Signal Processing Workshop and 5th IEEE Signal Processing Education Workshop, Marco Island, FL, USA, 4–7 January 2009; pp. 132–137. [Google Scholar]
- Yonggang, W. Underwater acoustic channel estimation for pilot based OFDM. In Proceedings of the 2011 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Xi’an, China, 14–19 September 2011; pp. 1–5. [Google Scholar]
- Jiang, R.; Wang, X.; Cao, S.; Zhao, J.; Li, X. Deep neural networks for channel estimation in underwater acoustic OFDM systems. IEEE Access 2019, 7, 23579–23594. [Google Scholar] [CrossRef]
- Wang, X.; Wang, X.; Jiang, R.; Wang, W.; Chen, Q.; Wang, X. Channel modelling and estimation for shallow underwater acoustic OFDM communication via simulation platform. Appl. Sci. 2019, 9, 447. [Google Scholar] [CrossRef] [Green Version]
- Kamışlıoğlu, B.; Akbal, A. LSE Channel Estimation and Performance Analysis of OFDM Systems. Fırat Univ. Turk. J. Sci. Technol. 2017, 12, 53–57. [Google Scholar]
- Junejo, N.U.R.; Esmaiel, H.; Sun, H.; Qasem, Z.A.; Wang, J. Pilot-Based Adaptive Channel Estimation for Underwater Spatial Modulation Technologies. Symmetry 2019, 11, 711. [Google Scholar] [CrossRef] [Green Version]
- Preisig, J.; Blair, B.; Li, W. Channel estimation for underwater acoustic communications: Sparse channels, soft input data, and Bayesian techniques. J. Acoust. Soc. Am. 2008, 123, 3892. [Google Scholar] [CrossRef]
- Gomes, J.; Barroso, V. Time-reversed OFDM communication in underwater channels. In Proceedings of the IEEE 5th Workshop on Signal Processing Advances in Wireless Communications, Lisbon, Portugal, 11–14 July 2004; pp. 626–630. [Google Scholar]
- Ramadan, K.; Dessouky, M.; Elagooz, S.; Elkordy, M.; El-Samie, F.A. Equalization and carrier frequency offset compensation for underwater acoustic OFDM systems. Ann. Data Sci. 2018, 5, 259–272. [Google Scholar] [CrossRef]
- Altabbaa, M.T.; Panayirci, E. Channel estimation and equalization algorithm for OFDM-based underwater acoustic communications systems. ICWMC 2017, 113–124. [Google Scholar]
- Yin, J.; Ge, W.; Han, X.; Guo, L. Frequency-domain equalization with interference rejection combining for single carrier multiple-input multiple-output underwater acoustic communications. J. Acoust. Soc. Am. 2020, 147, EL138–EL143. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- He, Q.; Wang, S.; Zhang, W. Low-complexity MMSE iterative equalization for multiband OFDM systems in underwater acoustic channels. In Proceedings of the 2017 IEEE 9th International Conference on Communication Software and Networks (ICCSN), Guangzhou, China, 6–8 May 2017; pp. 492–497. [Google Scholar]
- Sui, Z.; Yan, S. Frequency Channel Equalization Based on Variable Step-Size LMS Algorithm for OFDM Underwater Communications. In Proceedings of the 2019 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Dalian, China, 20–22 September 2019; pp. 1–5. [Google Scholar]
- Otnes, R.; Eggen, T.H. Underwater acoustic communications: Long-term test of turbo equalization in shallow water. IEEE J. Ocean. Eng. 2008, 33, 321–334. [Google Scholar] [CrossRef]
- Cai, X.; Giannakis, G.B. Error probability minimizing pilots for OFDM with M-PSK modulation over Rayleigh-fading channels. IEEE Trans. Veh. Technol. 2004, 53, 146–155. [Google Scholar] [CrossRef]
- Kay, S.M. Fundamentals of Statistical Signal Processing; Prentice Hall PTR: Hoboken, NJ, USA, 1993. [Google Scholar]
- Murad, M.; Tasadduq, I.A.; Otero, P.J.I.A. Towards multicarrier waveforms beyond OFDM: Performance analysis of GFDM modulation for underwater acoustic channels. IEEE Access 2020, 8, 222782–222799. [Google Scholar] [CrossRef]
- Bocus, M.J.; Agrafiotis, D.; Doufexi, A. Underwater acoustic video transmission using MIMO-FBMC. In Proceedings of the 2018 OCEANS-MTS/IEEE Kobe Techno-Oceans (OTO), Kobe, Japan, 28–31 May 2018; pp. 1–6. [Google Scholar]
- Urick, R.J. Sound Propagation in the SEA; Peninsula Publishing: Los Altos, CA, USA, 1982. [Google Scholar]
- Wan, L. Underwater Acoustic OFDM: Algorithm Design, DSP Implementation, and Field Performance. Ph.D. Thesis, University of Connecticut, Storrs, CT, USA, 2014. [Google Scholar]
- Philip, M.; Morse, K.U.I. Theoretical Acoustics; Princeton University Press: Princeton, NJ, USA, 1986. [Google Scholar]
- Roth, P.O. Fundamentos de Propagación de Ondas; Universidad de Malaga, Manual: Malaga, Spain, 2015. [Google Scholar]
- Medwin, H. Speed of sound in water: A simple equation for realistic parameters. J. Acoust. Soc. Am. 1975, 58, 1318–1319. [Google Scholar] [CrossRef]
- Kulhandjian, H.; Melodia, T. Modeling underwater acoustic channels in short-range shallow water environments. In Proceedings of the ACM International Conference on Underwater Networks & Systems, Rome, Italy, 12–14 November 2014; pp. 1–5. [Google Scholar]
- Radosevic, A.; Proakis, J.G.; Stojanovic, M. Statistical characterization and capacity of shallow water acoustic channels. In Proceedings of the OCEANS 2009-EUROPE, Bremen, Germany, 11–14 May 2009; pp. 1–8. [Google Scholar]
- Ruiz-Vega, M.C.C.; Paris, J.F.; Otero, P. Ricean shadowed statistical characterization of shallow water acoustic channels for wireless communications. In Proceedings of the IEEE Conference Underwater Communications: Channel Modelling & Validation, UComms, Sestri Levante, Italy, 12–14 September 2012. [Google Scholar]
- Jeruchim, M.; Balaban, P.; Shanmugan, K.S. Simulation of Communication Systems, 2nd ed.; Kluwer Academic/Plenum: New York, NY, USA, 2000. [Google Scholar]
- Tasadduq, I.A.; Murad, M.; Otero, P. CPM-OFDM Performance over Underwater Acoustic Channels. Engineering 2021, 9, 1104. [Google Scholar] [CrossRef]
- Stojanovic, M. On the relationship between capacity and distance in an underwater acoustic communication channel. ACM SIGMOBILE Mob. Comput. Commun. Rev. 2007, 11, 34–43. [Google Scholar] [CrossRef]
- Hebbar, R.P.; Poddar, P.G. Generalized frequency division multiplexing–based acoustic communication for underwater systems. Int. J. Commun. Syst. 2020, 33, e4292. [Google Scholar] [CrossRef]
- Walree, P.V.; Otnes, R.; Jenserud, T. The Watermark manual and user’s guide-version 1.0., User Manual. 2016. [Google Scholar]
- van Walree, P.A.; Socheleau, F.-X.; Otnes, R.; Jenserud, T. The watermark benchmark for underwater acoustic modulation schemes. IEEE J. Ocean. Eng. 2017, 42, 1007–1018. [Google Scholar] [CrossRef] [Green Version]
- Blossom, E. GNU radio: Tools for exploring the radio frequency spectrum. Linux J. 2004, 2004, 4. [Google Scholar]
- Pi, R. Raspberry Pi Zero: The $5 Computer. Available online: https://www.raspberrypi.org/products/raspberry-pi-zero/ (accessed on 28 October 2021).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Parameters | Values |
|---|---|---|
| Transceiver | Number of Subcarriers Number of Pilots Modulation Scheme CP Length Data Rates | to (typically one-fourth of the number of subcarriers) BPSK, QPSK One-fourth of the number of subcarriers 8 kbps for BPSK and 16 kbps for QPSK |
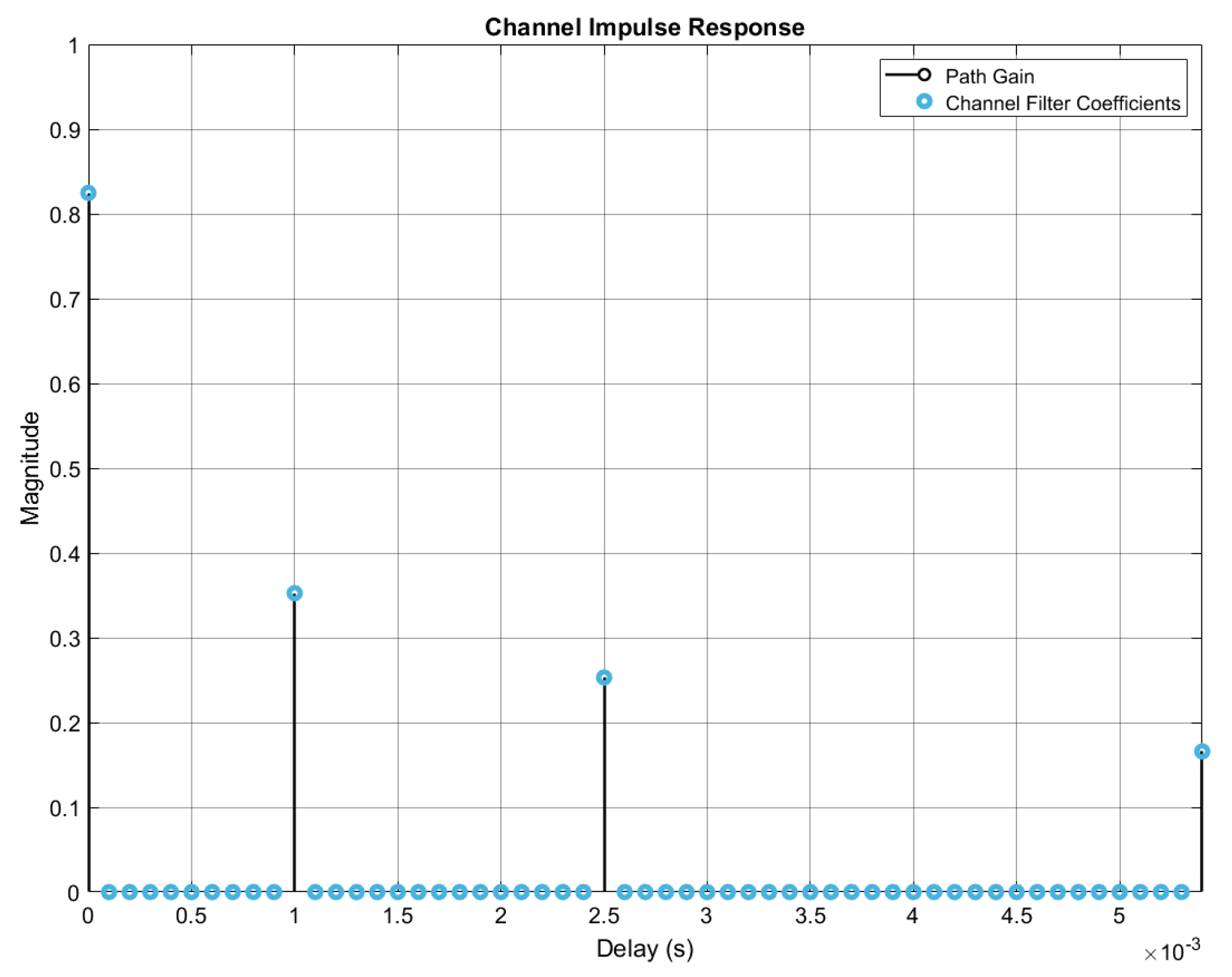
| Channel | Bandwidth Carrier Frequency Number of Taps Distance Transmitter Depth Receiver Depth Doppler Frequency Path Gains Delay | kHz 30 kHz to m m m Hz s |
| Equalizer | N = 64 | N = 128 | N = 256 | N = 512 |
|---|---|---|---|---|
| LS | 0.006434 | |||
| ZF |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Murad, M.; Tasadduq, I.A.; Otero, P. Pilot-Assisted OFDM for Underwater Acoustic Communication. J. Mar. Sci. Eng. 2021, 9, 1382. https://doi.org/10.3390/jmse9121382
Murad M, Tasadduq IA, Otero P. Pilot-Assisted OFDM for Underwater Acoustic Communication. Journal of Marine Science and Engineering. 2021; 9(12):1382. https://doi.org/10.3390/jmse9121382
Chicago/Turabian StyleMurad, Mohsin, Imran A. Tasadduq, and Pablo Otero. 2021. "Pilot-Assisted OFDM for Underwater Acoustic Communication" Journal of Marine Science and Engineering 9, no. 12: 1382. https://doi.org/10.3390/jmse9121382
APA StyleMurad, M., Tasadduq, I. A., & Otero, P. (2021). Pilot-Assisted OFDM for Underwater Acoustic Communication. Journal of Marine Science and Engineering, 9(12), 1382. https://doi.org/10.3390/jmse9121382