
Study on Slamming Pressure Characteristics of Platform under Freak Wave


Abstract
:1. Introduction
2. Theoretical Study on Numerical Wave Tanks
2.1. Governing Equations and Discrete Methods
2.2. Free Surface Tracking Method
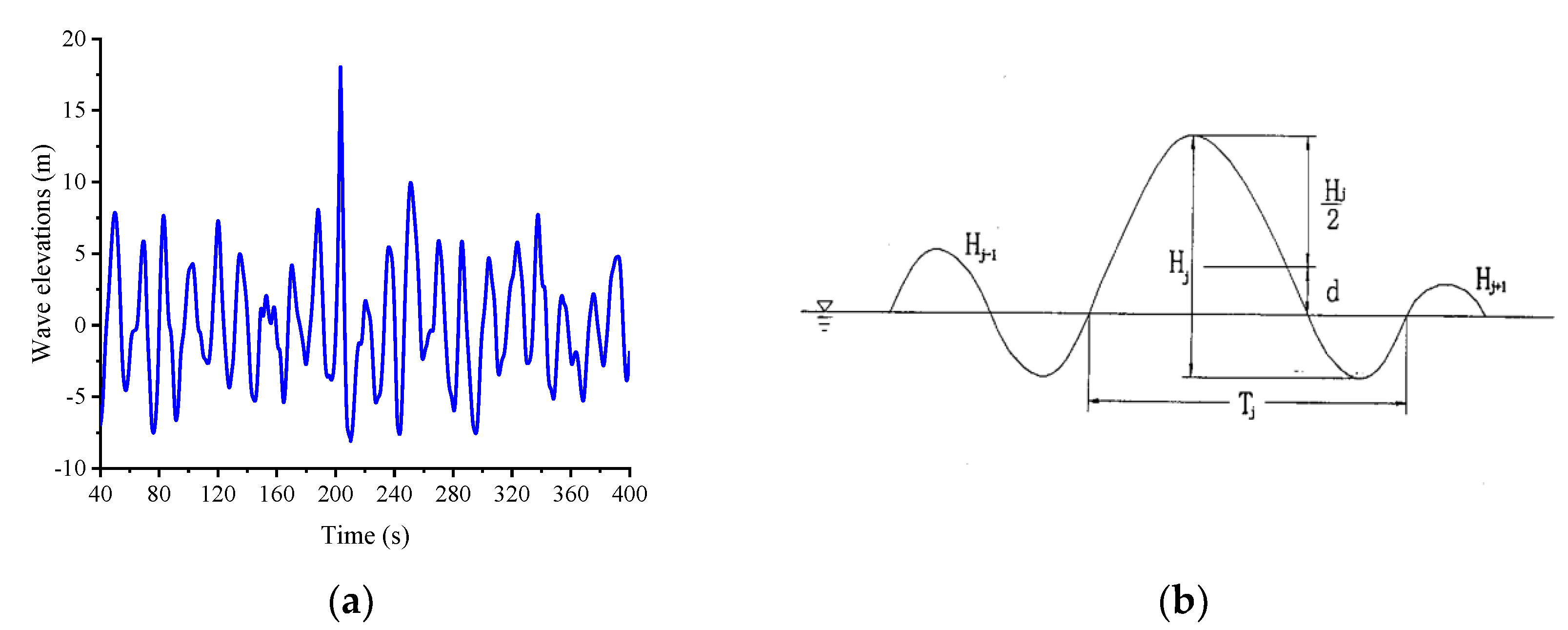
2.3. Numerical Wave Making Theory of Freak Wave
- (1)
- The maximum wave height of a freak wave is not less than twice as much as the significant wave height;
- (2)
- The maximum wave height of the freak wave is greater than twice the height of the adjacent wave;
- (3)
- The ratio of the peak to the height of the freak wave is about 0.65.
2.4. Numerical Wave Making Method of Freak Wave
3. Establishment and Verification of Numerical Model
3.1. Selection of Similarity Ratio
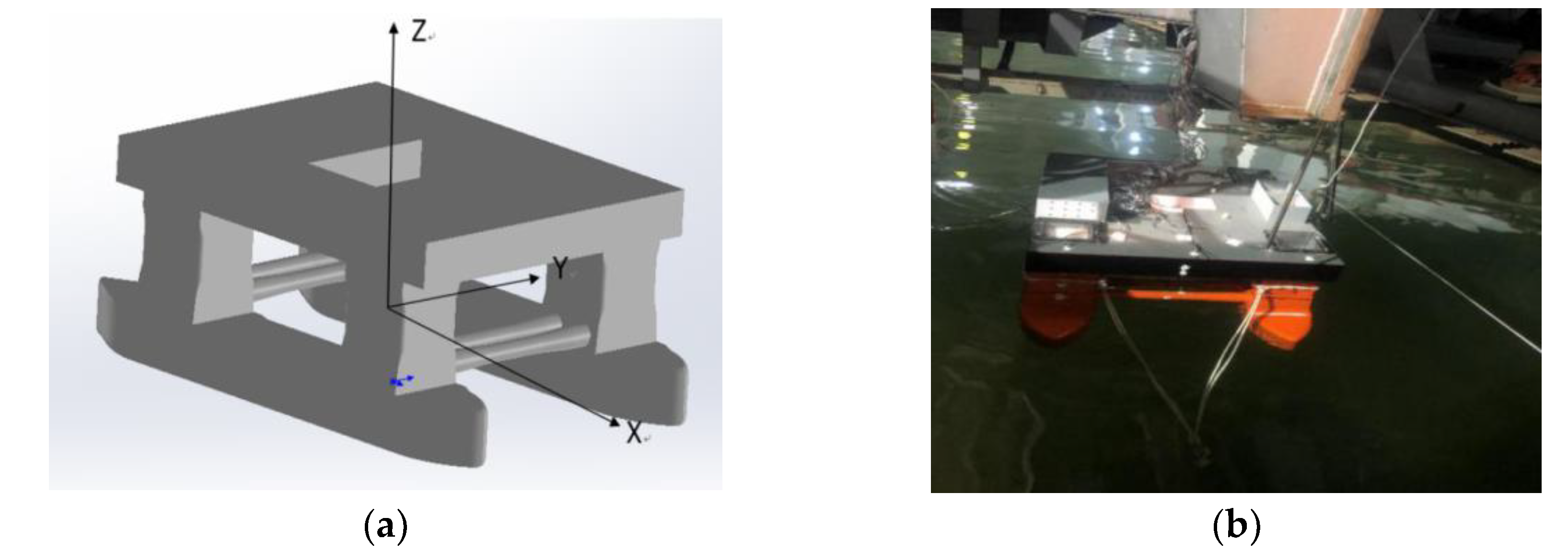
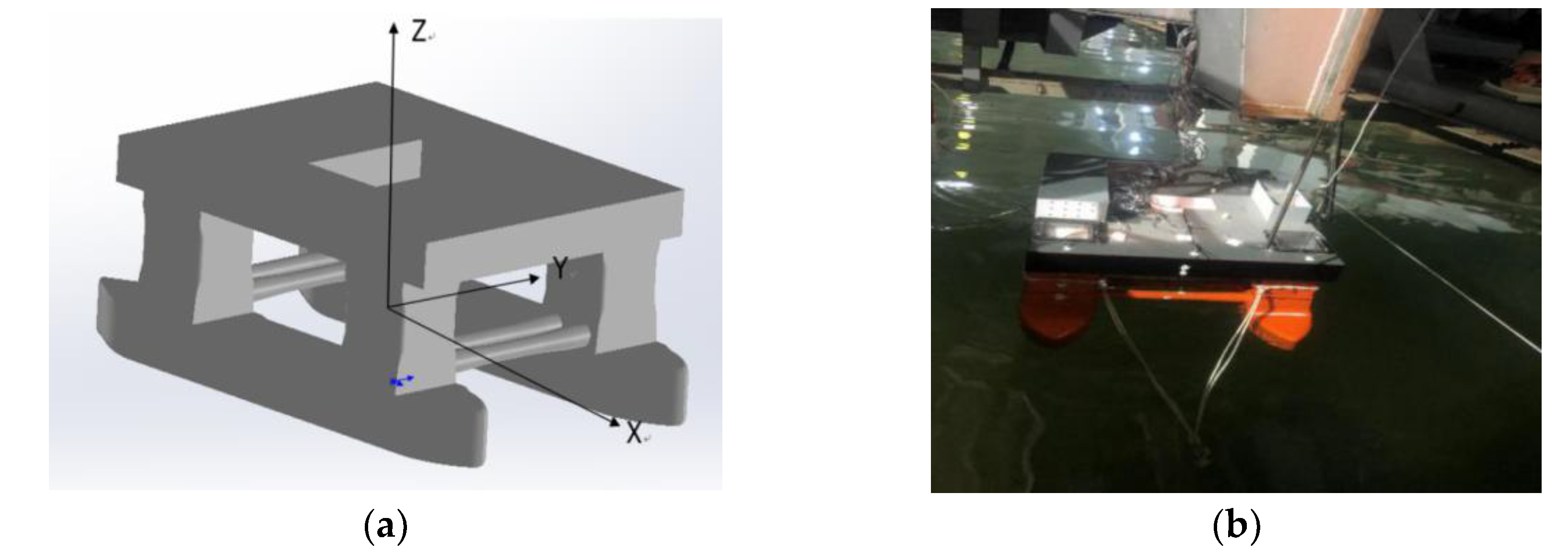
3.2. Description of the Platform Model
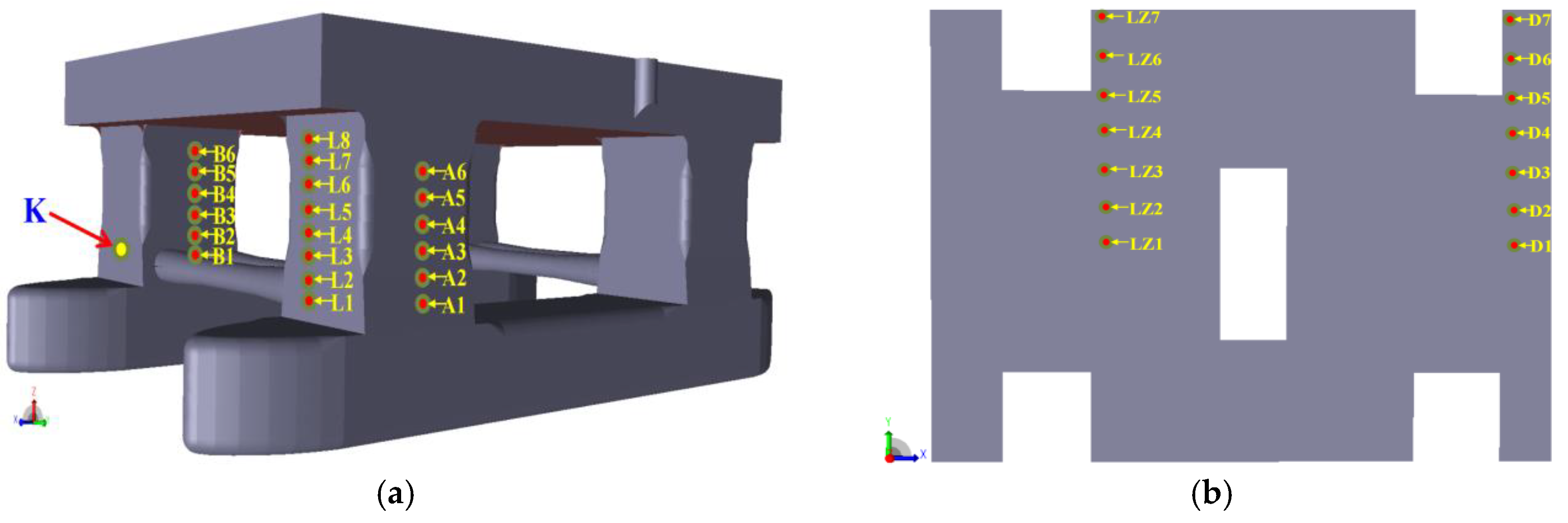
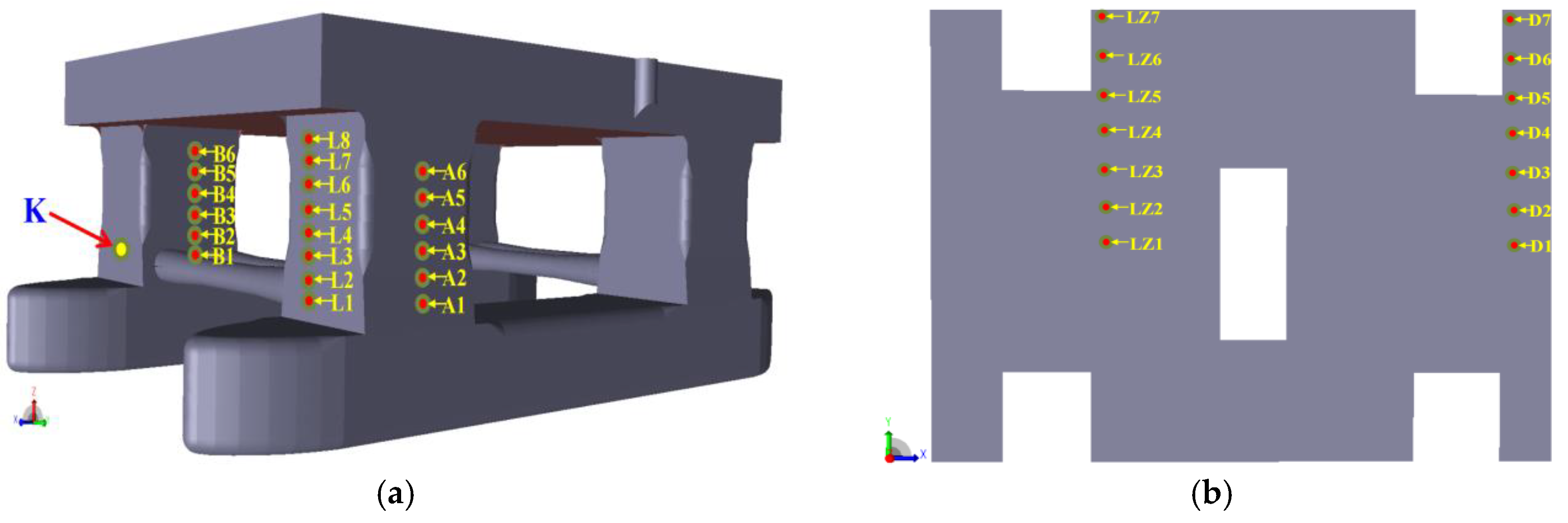
3.3. Platform Monitoring Point Location
3.4. Verification of Numerical Model
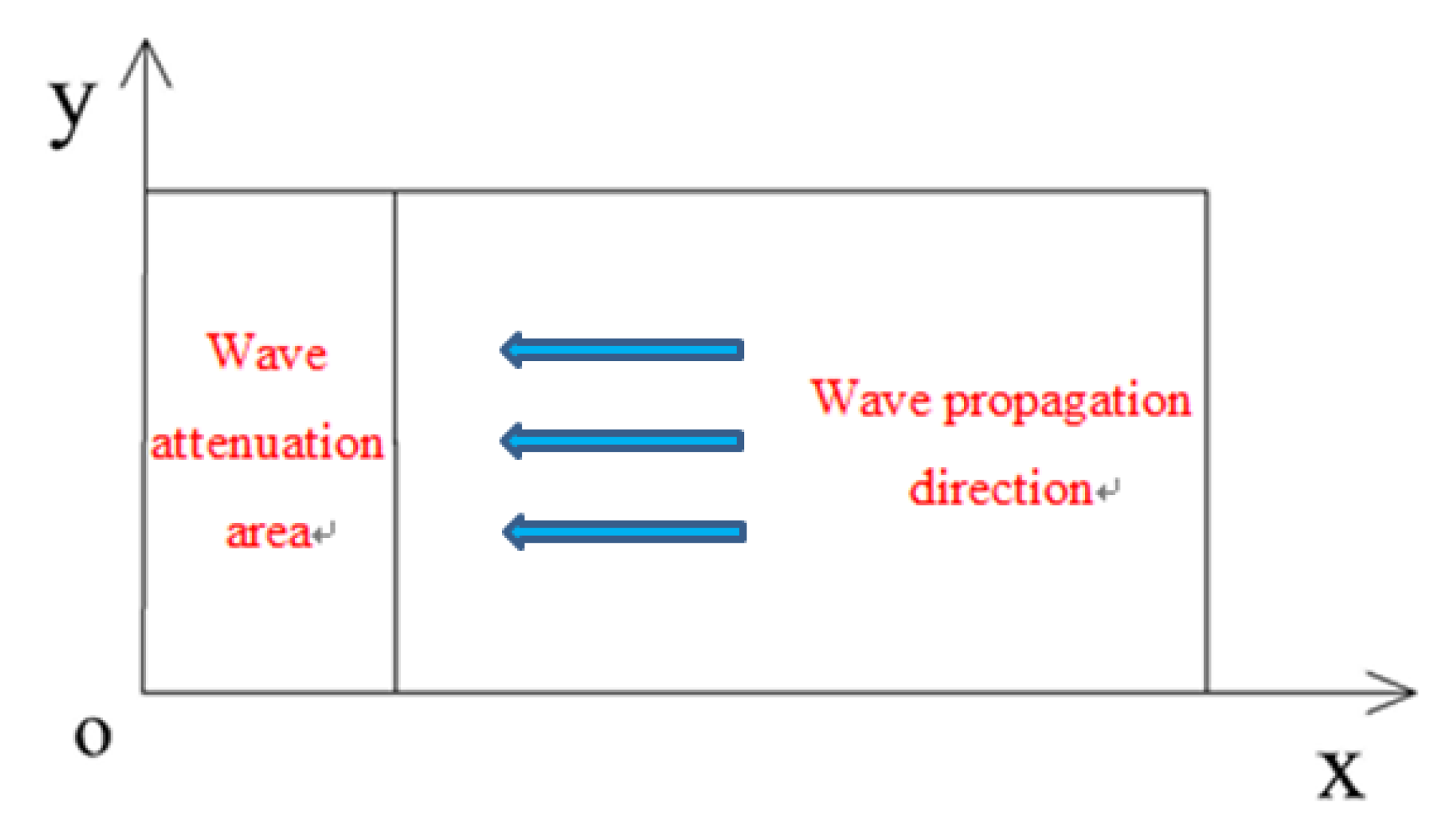
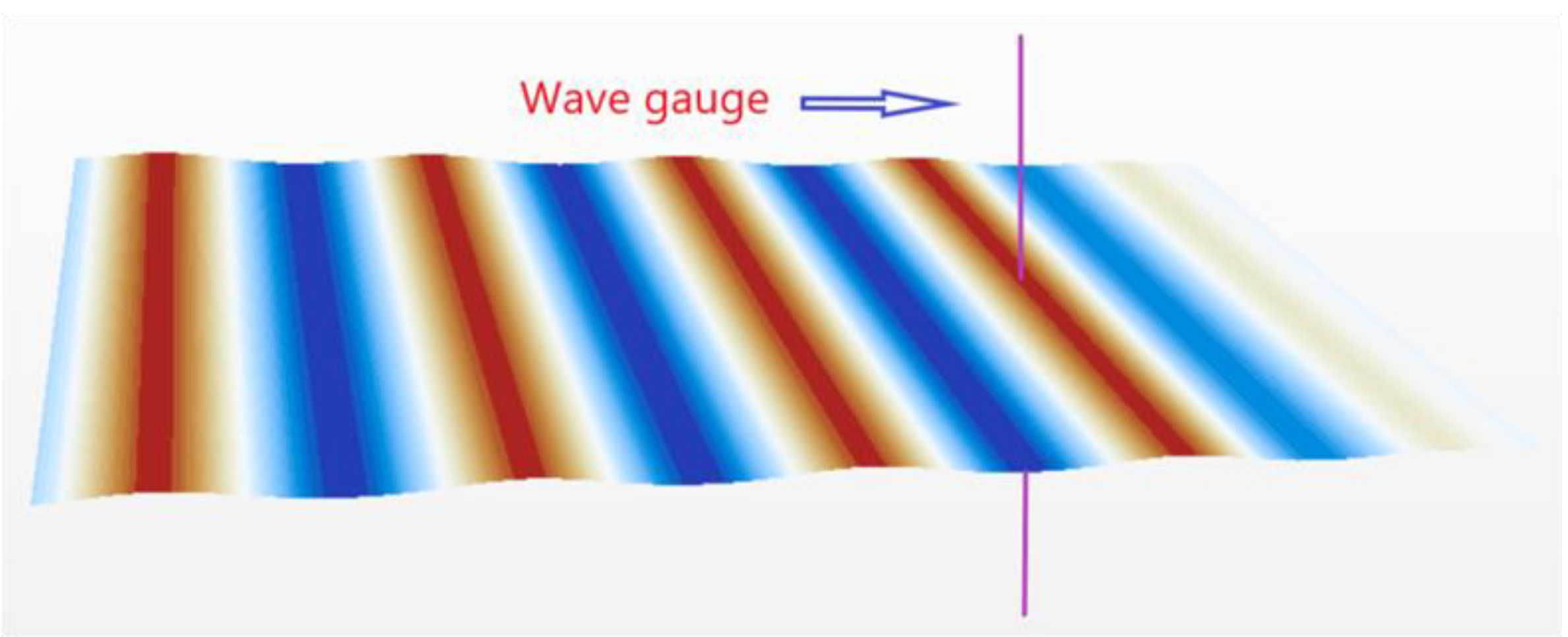
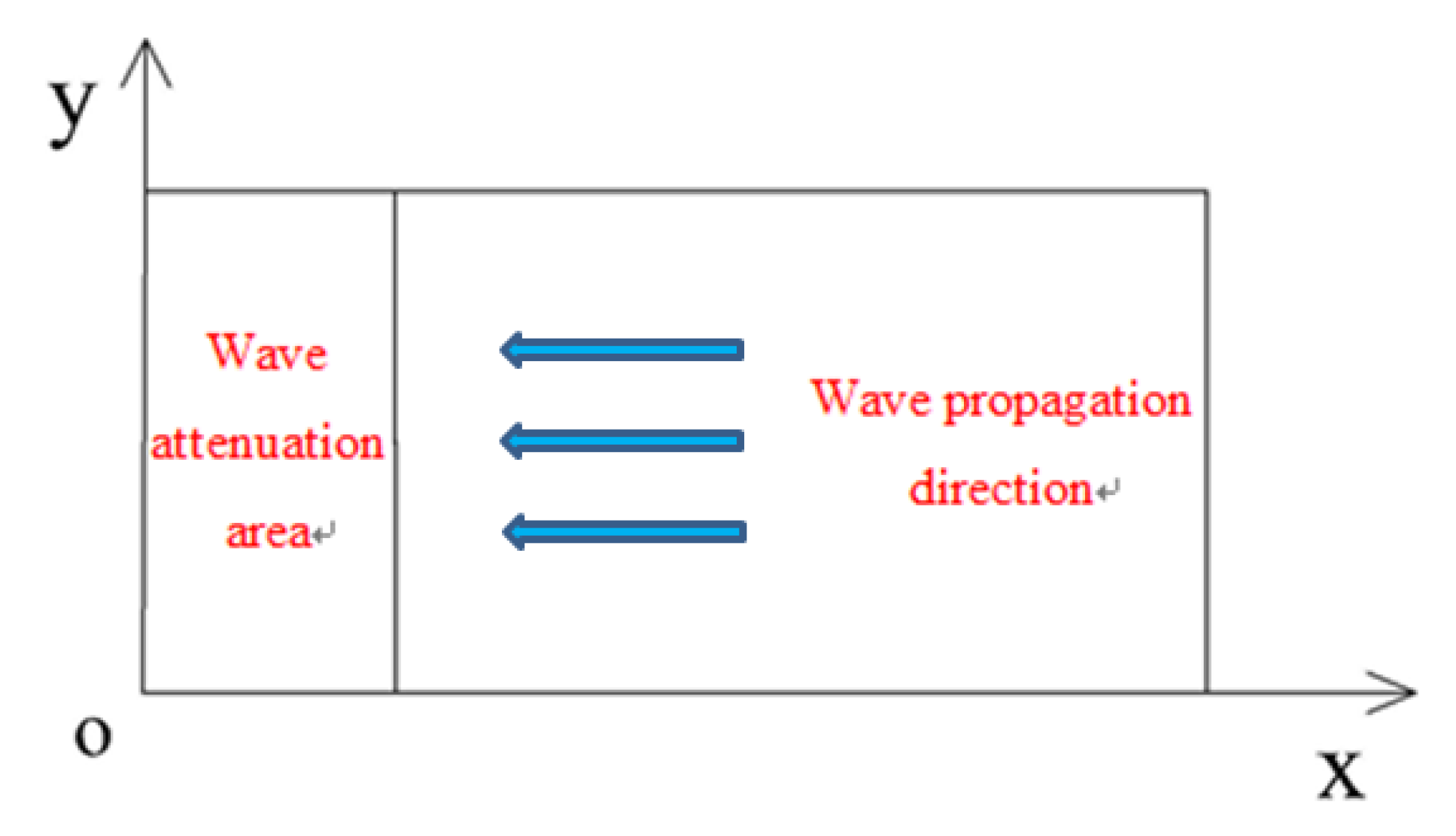
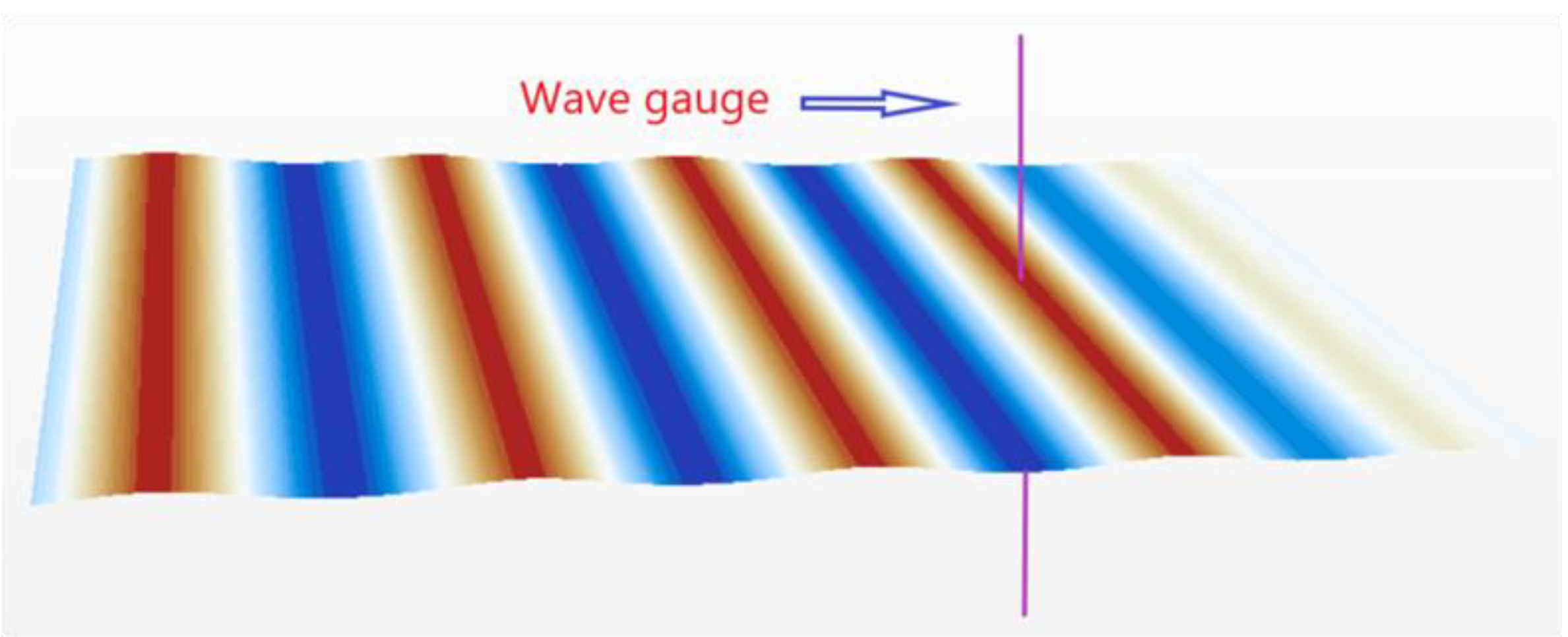
3.4.1. Wave Making and Wave Elimination of Numerical Tank
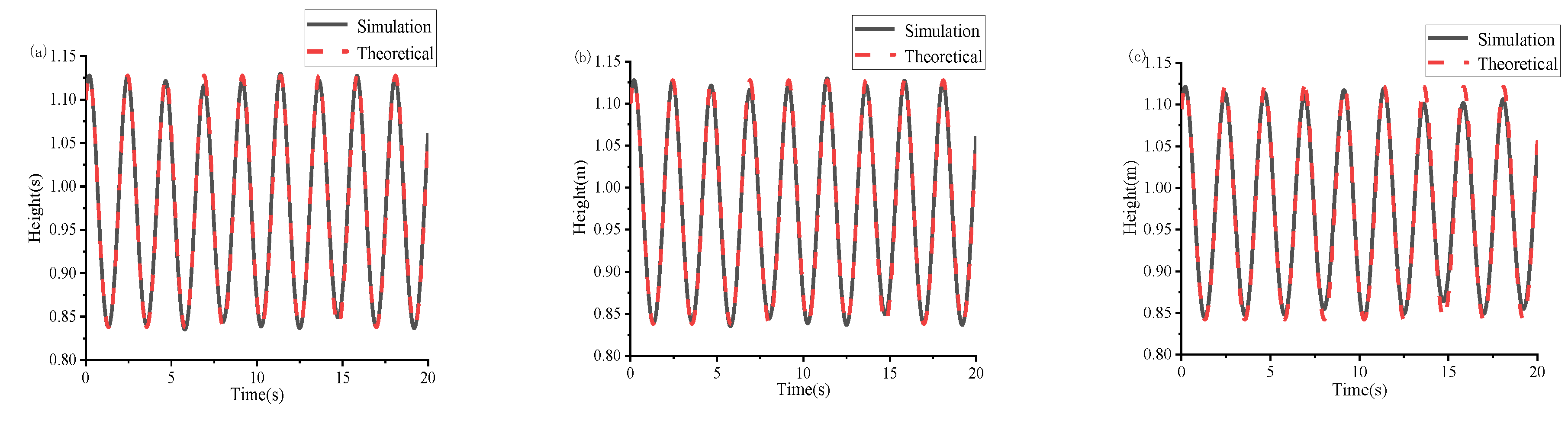
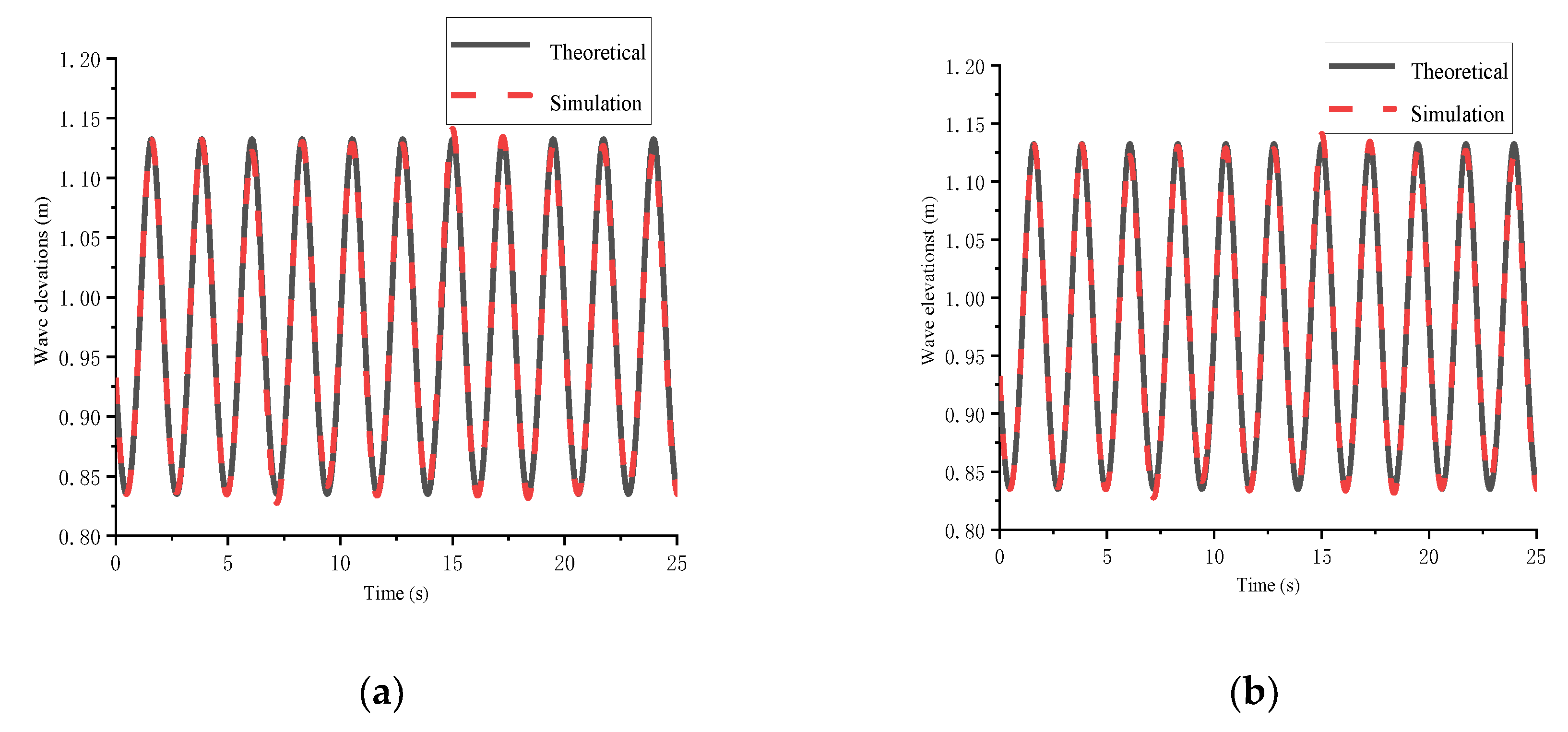
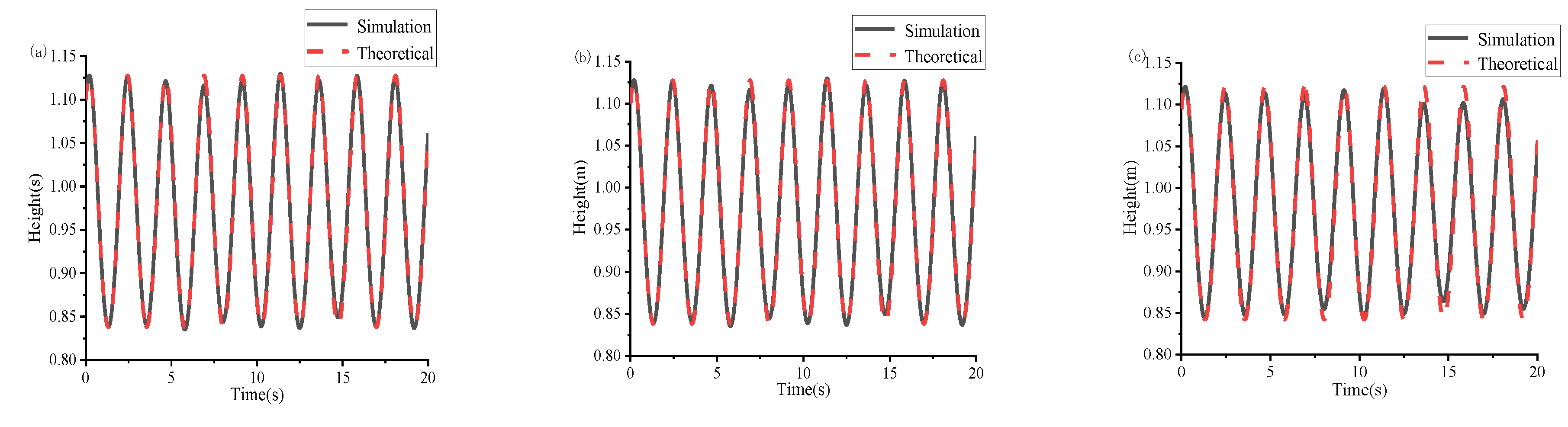
3.4.2. Simulation and Theoretical Comparison of Numerical Wave Generation
3.4.3. Verification of Convergence of Numerical Tank Grid
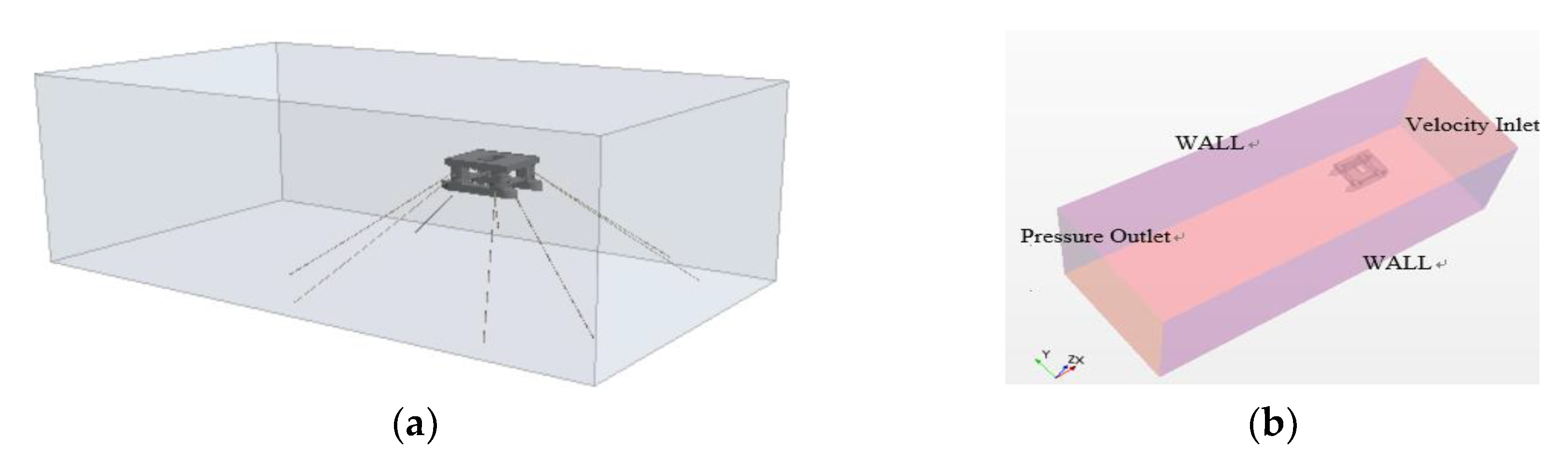
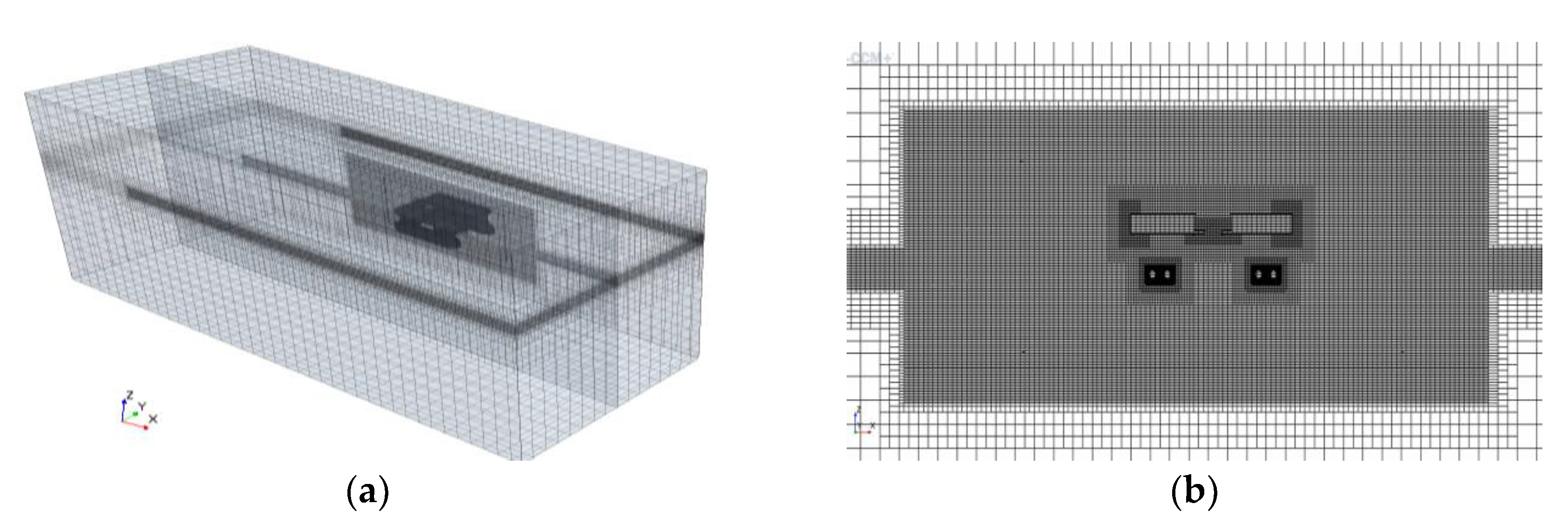
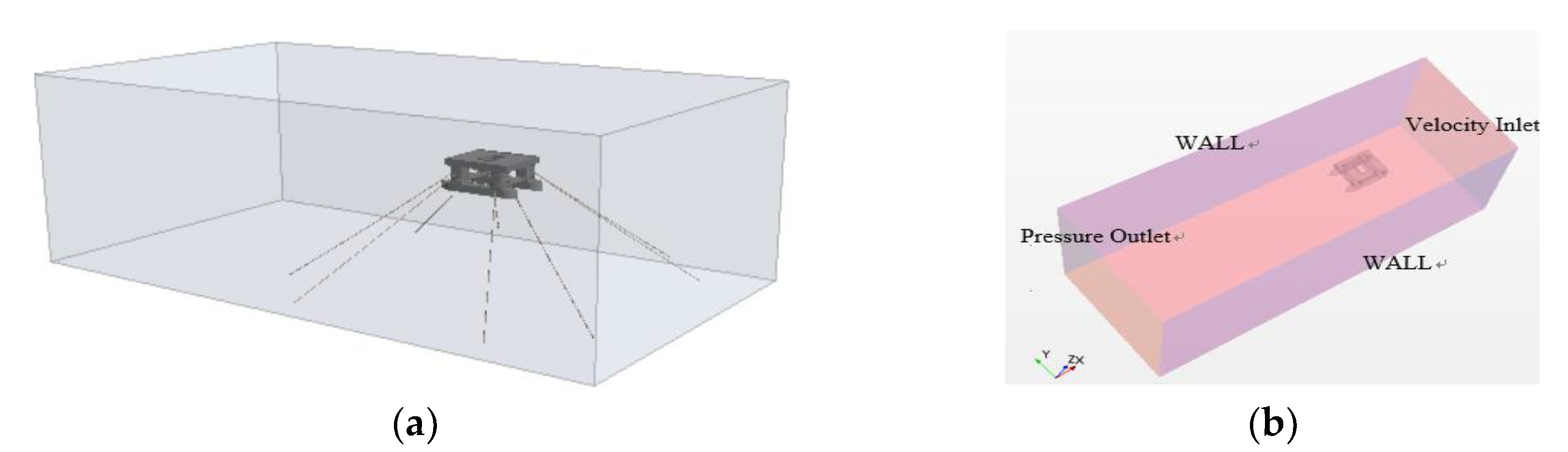
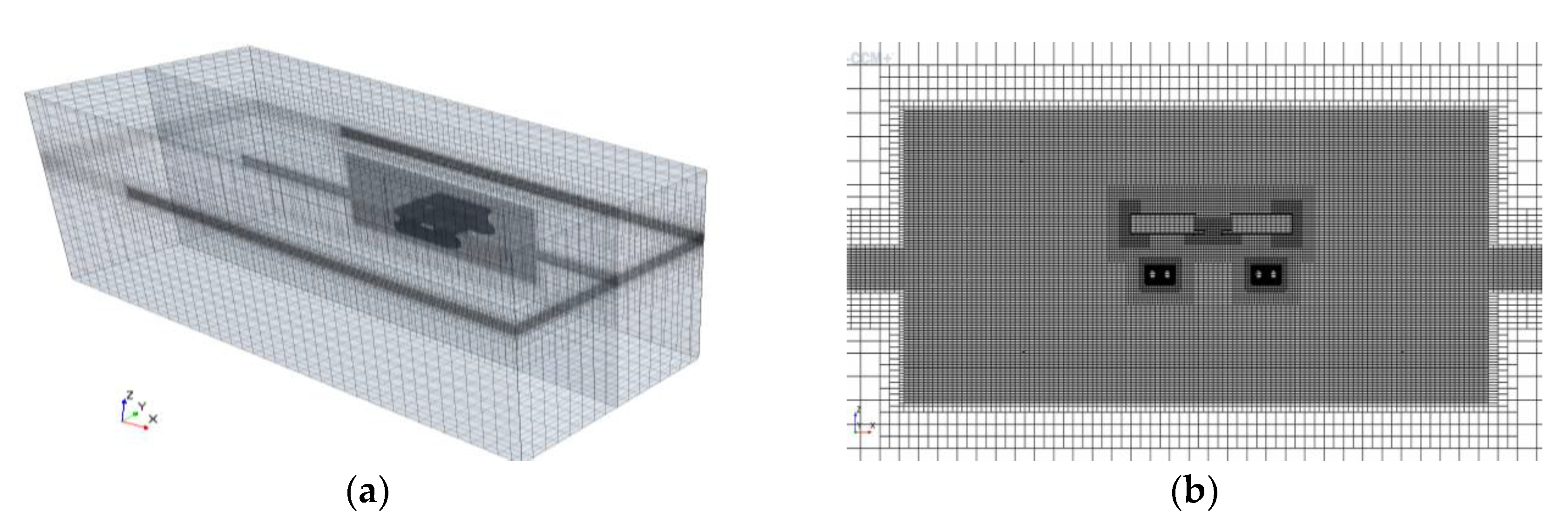
3.4.4. Computational Domain and Grid Generation
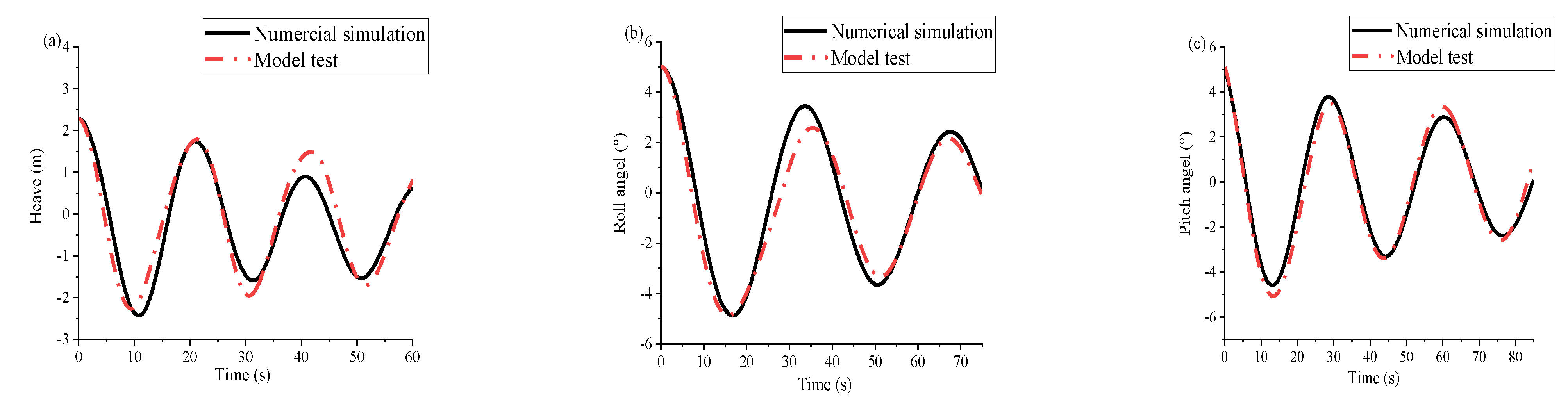
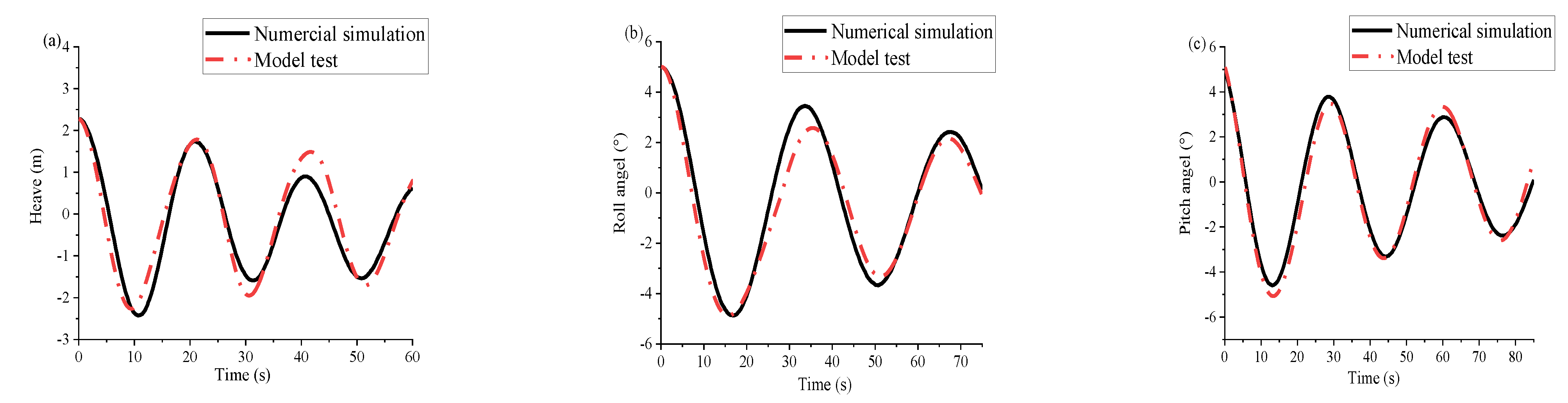
3.4.5. Attenuation Test with Experimental Results
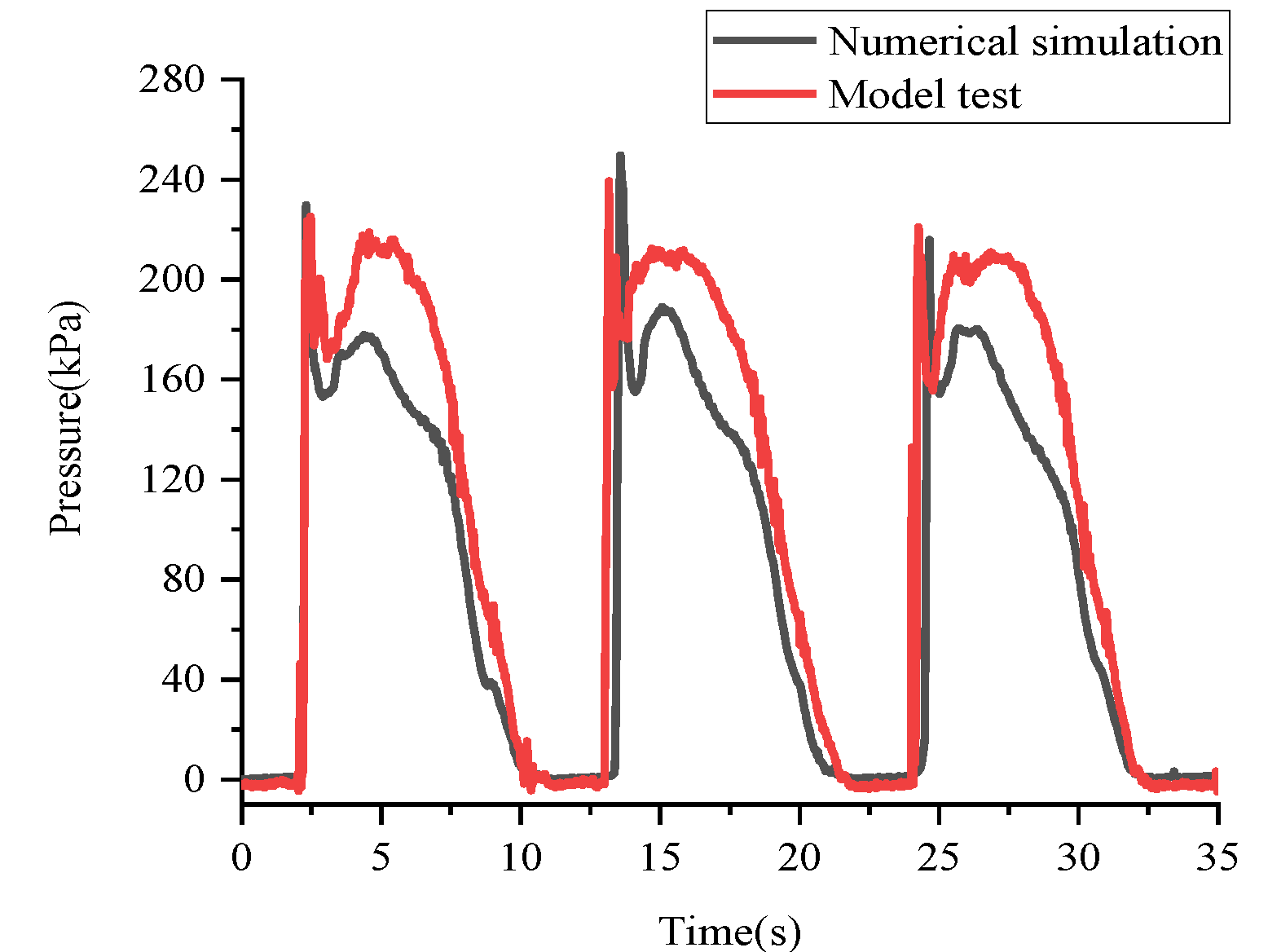
3.5. Analysis of Slamming Pressure
- (1)
- Both the numerical and test results show that the slamming period is about 11 s, which indicates that the numerical simulations are accurate enough and experimental tests are well conducted;
- (2)
- The simulated slamming pressure time series have the same trend as the experimental ones. The results show similar characteristics: short duration and significant nonlinearity;
- (3)
- The peak values of numerical slamming pressures are 230.9 kPa, 250.18 kPa, and 223.04 kPa, respectively, in these three wave periods, and the measured slamming peaks are 227.76 kPa, 240.54 kPa, and 218.13 kPa. The differences between them are 1.4%, 3.9%, and 2.3%, respectively. The results are close and within the allowable error range.
- (1)
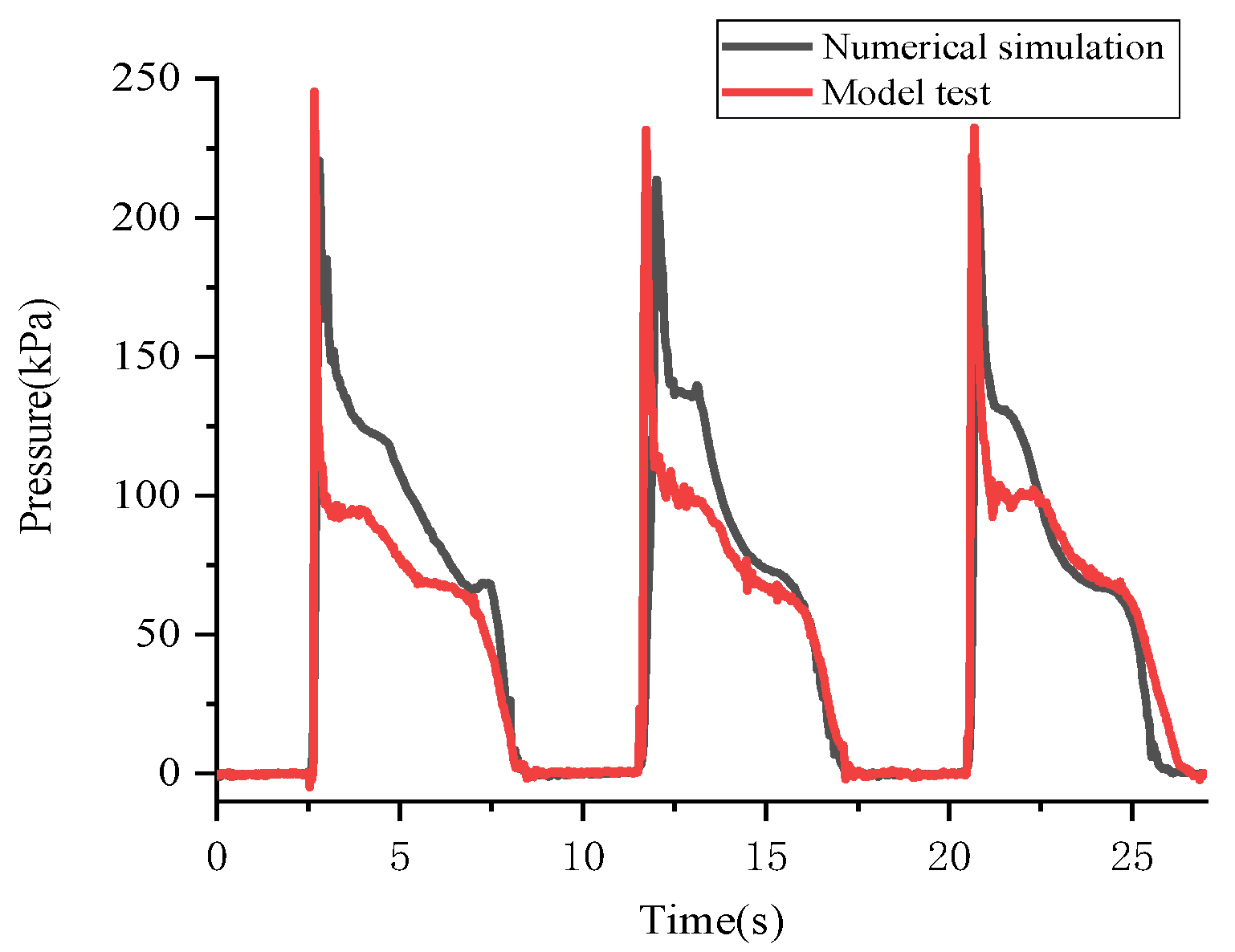
- Both the numerical results and the test results show that the period is about 9 s;
- (2)
- The development of slamming pressure at K-point is as follows: firstly, the slamming pressure increases sharply and steeply to the maximum, then decreases rapidly in 0.2–0.3 s, and decreases slowly till to the end. If compared with Figure 11, it can be found that the nonlinearity of the slamming pressure is more evident in this case. However, the fluctuating water pressure is less prominent than the one in the first case;
- (3)
- The simulated peaks of slamming pressures are 220.50 kPa, 213.85 kPa, and 210.09 kPa, respectively, and the measured ones are 245.52 kPa, 231.74 kPa, and 232.47 kPa. The differences between them are −10.2%, −7.7%, and −9.6%, respectively. The results are close and within the allowable error range.
4. Study on Load Distribution of Platform under Freak Wave in Numerical Simulation
4.1. Load Characteristics of Slamming Pressure
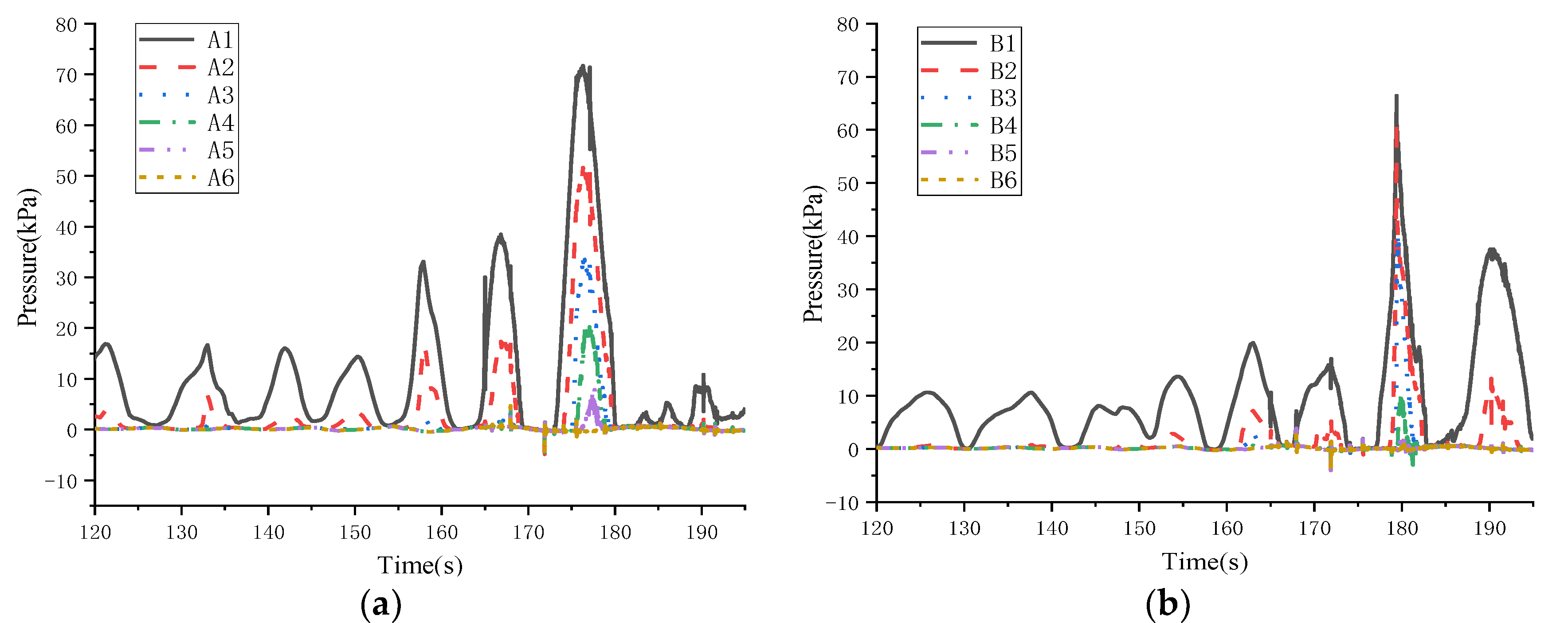
4.1.1. Slamming Loads in Head Sea
4.1.2. Slamming Loads in Beam Sea
4.2. Characteristics of Slamming Pressure Distribution
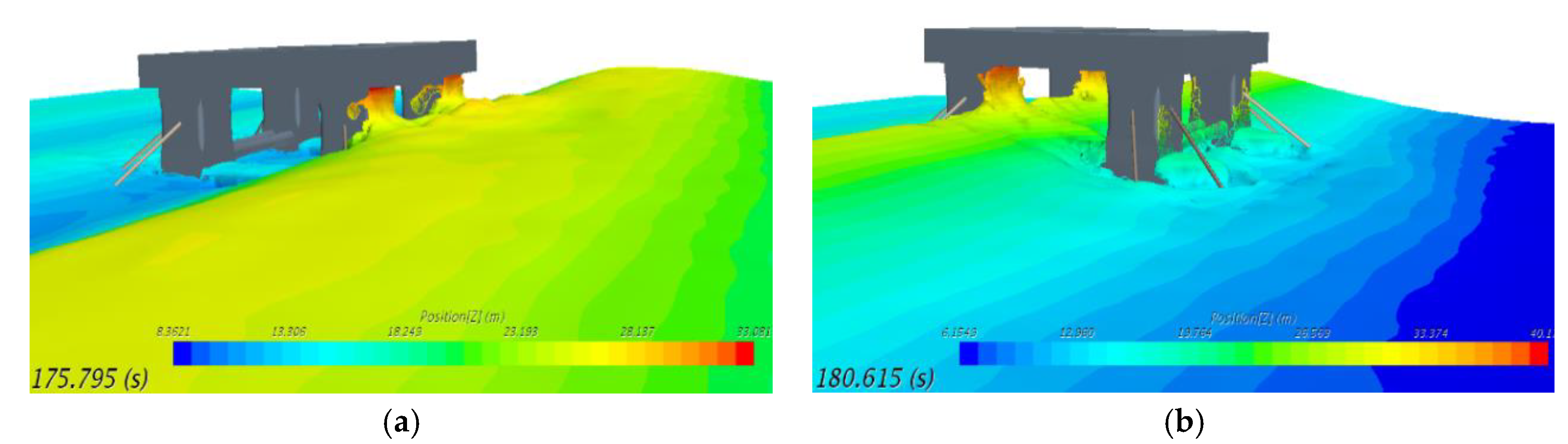
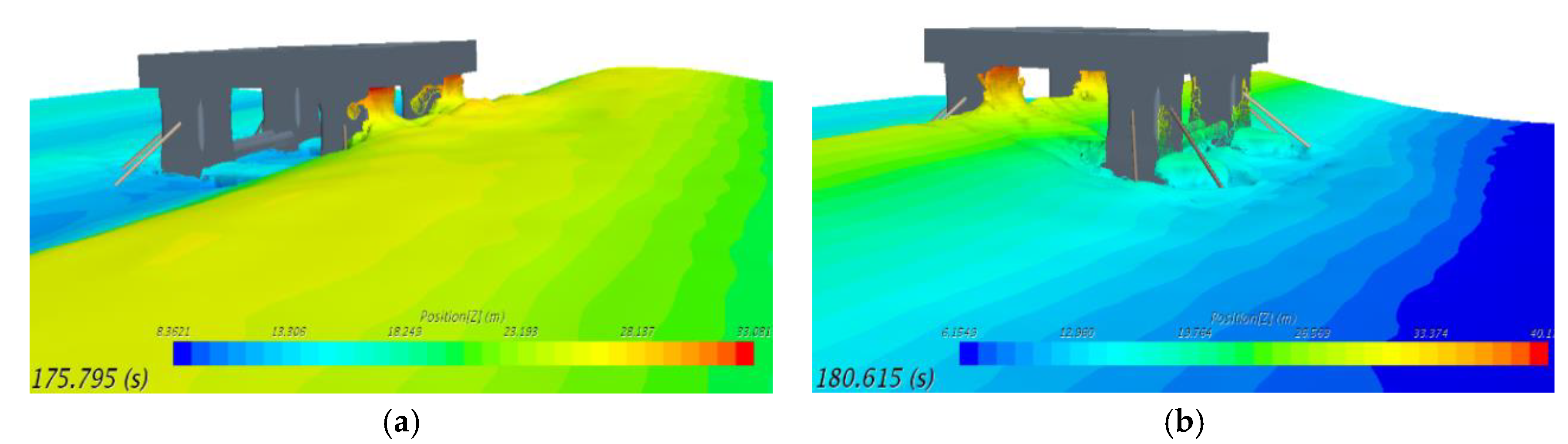
4.2.1. Free Surface Variations
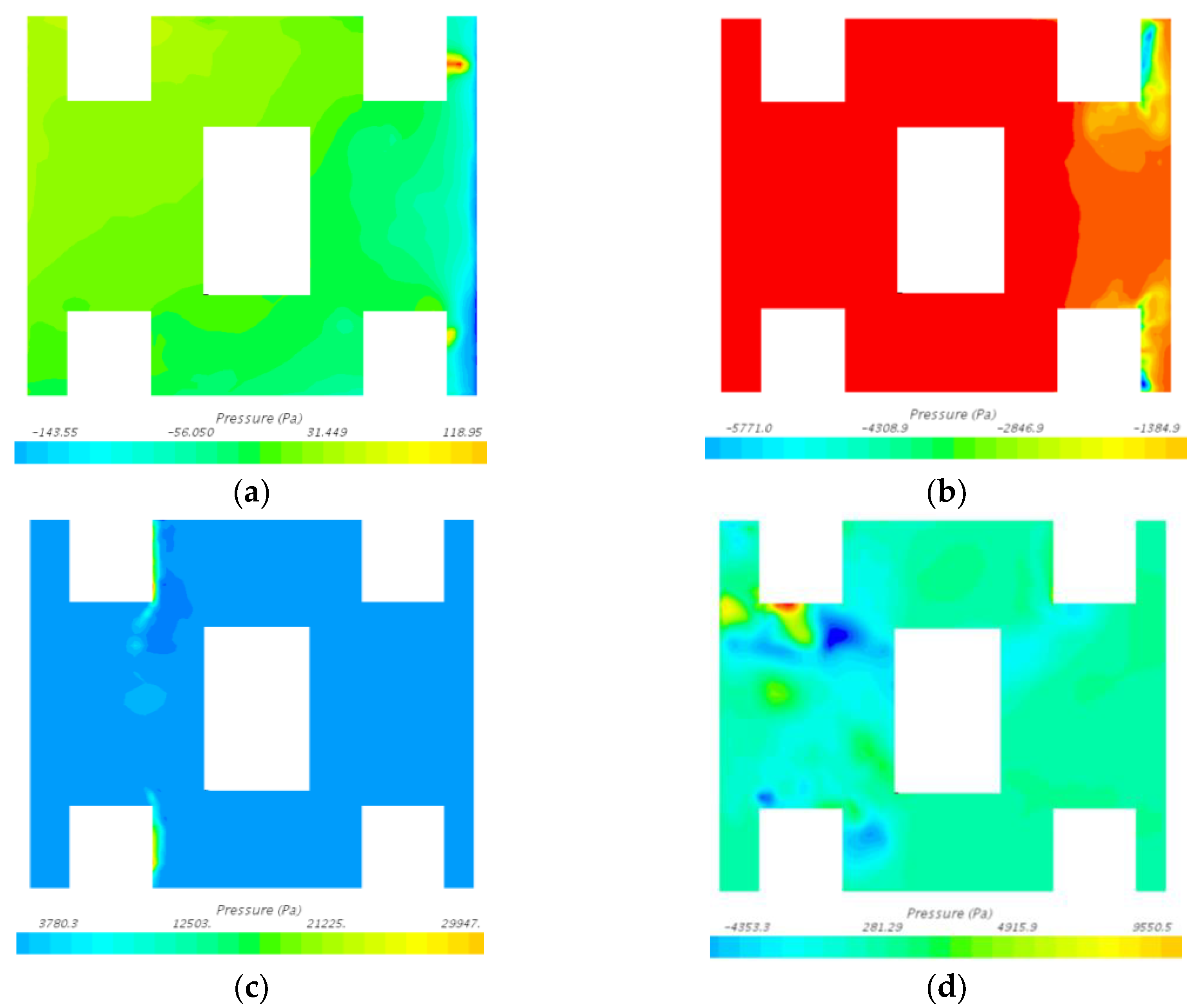
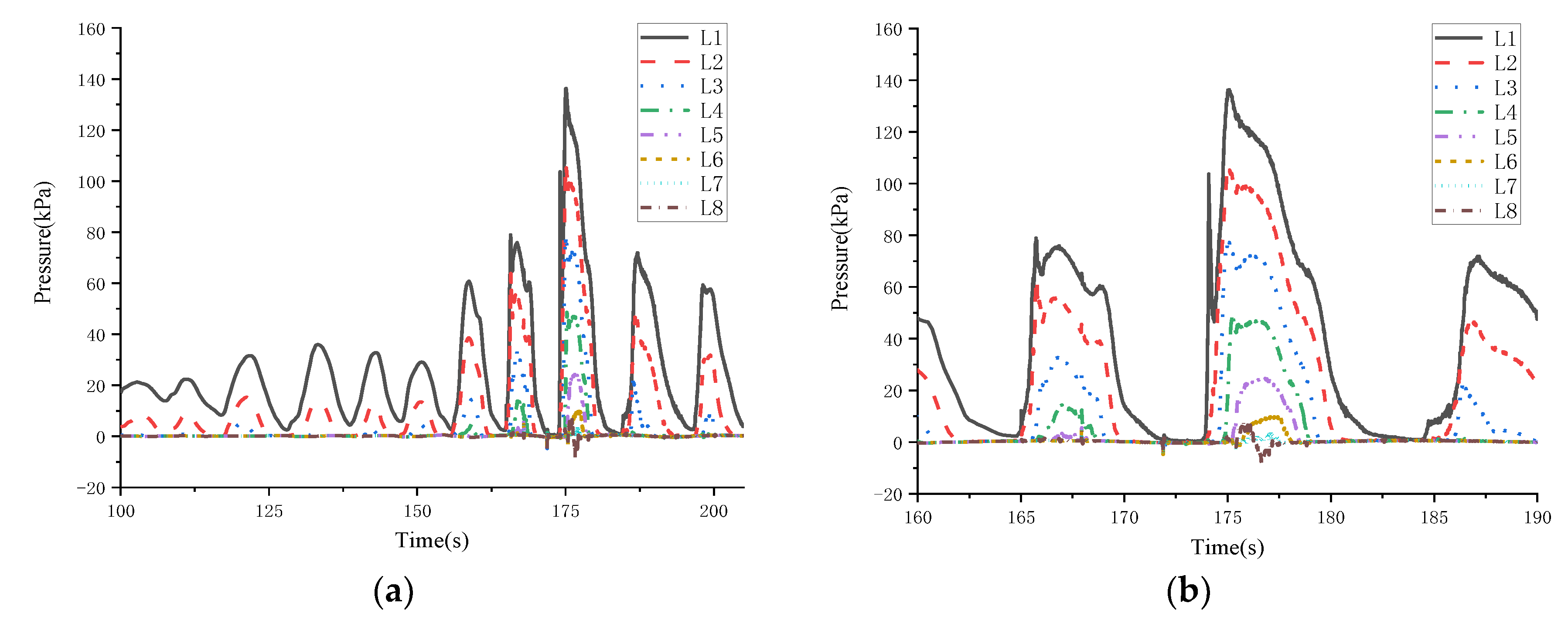
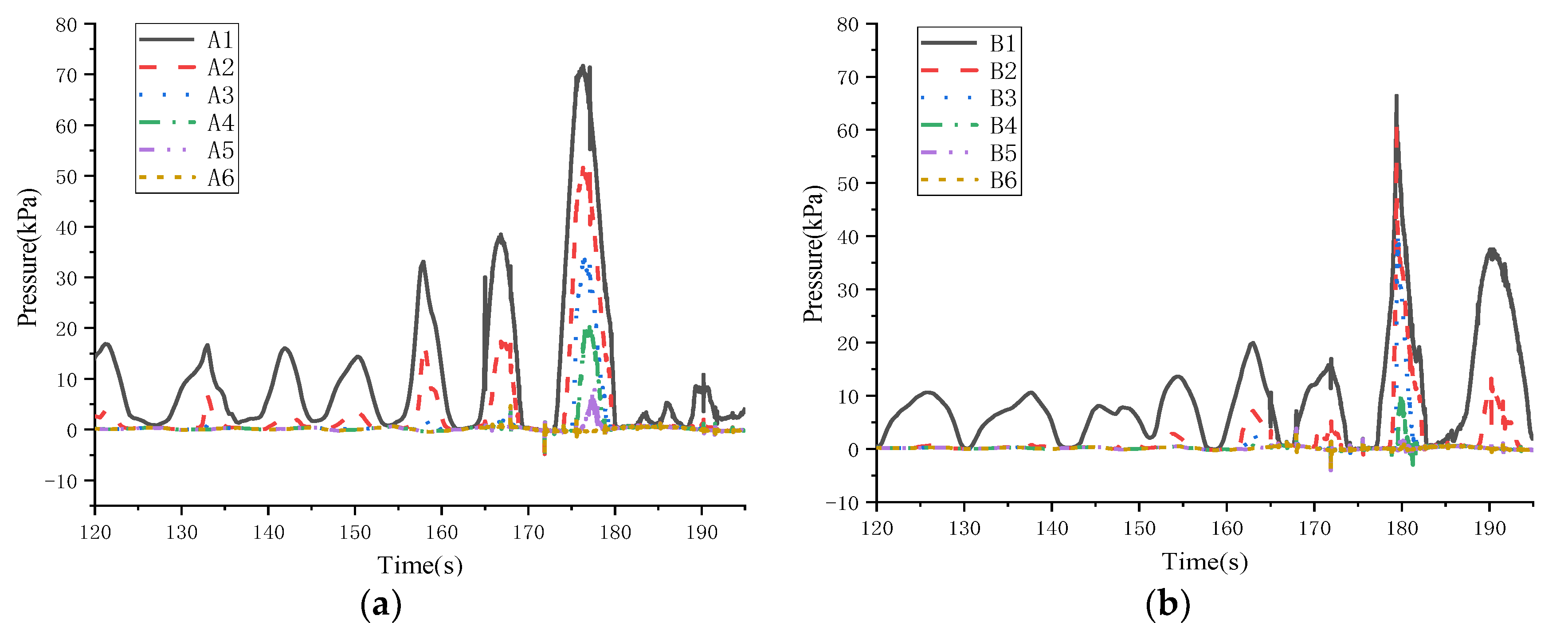
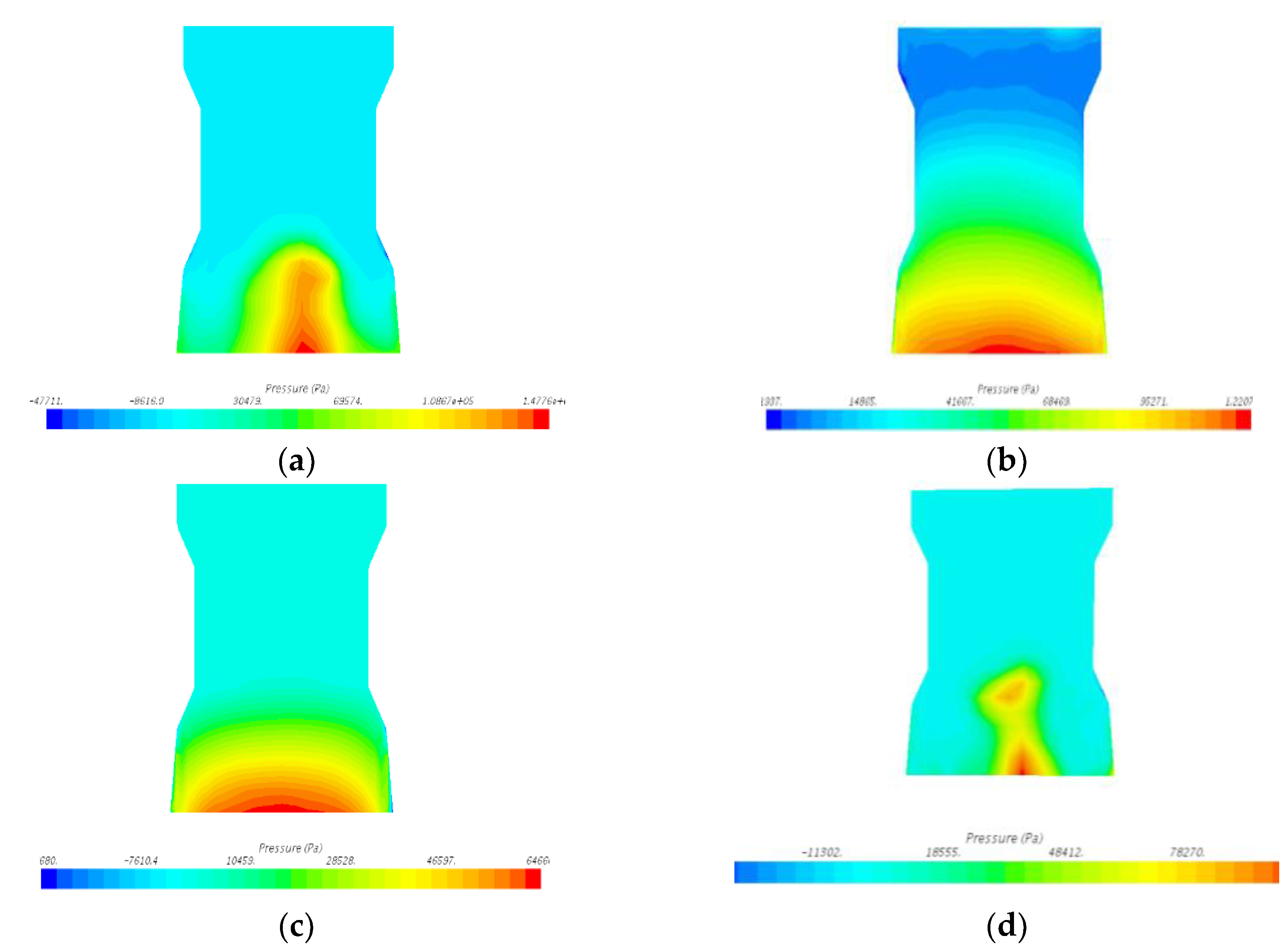
4.2.2. Column Pressure Distribution
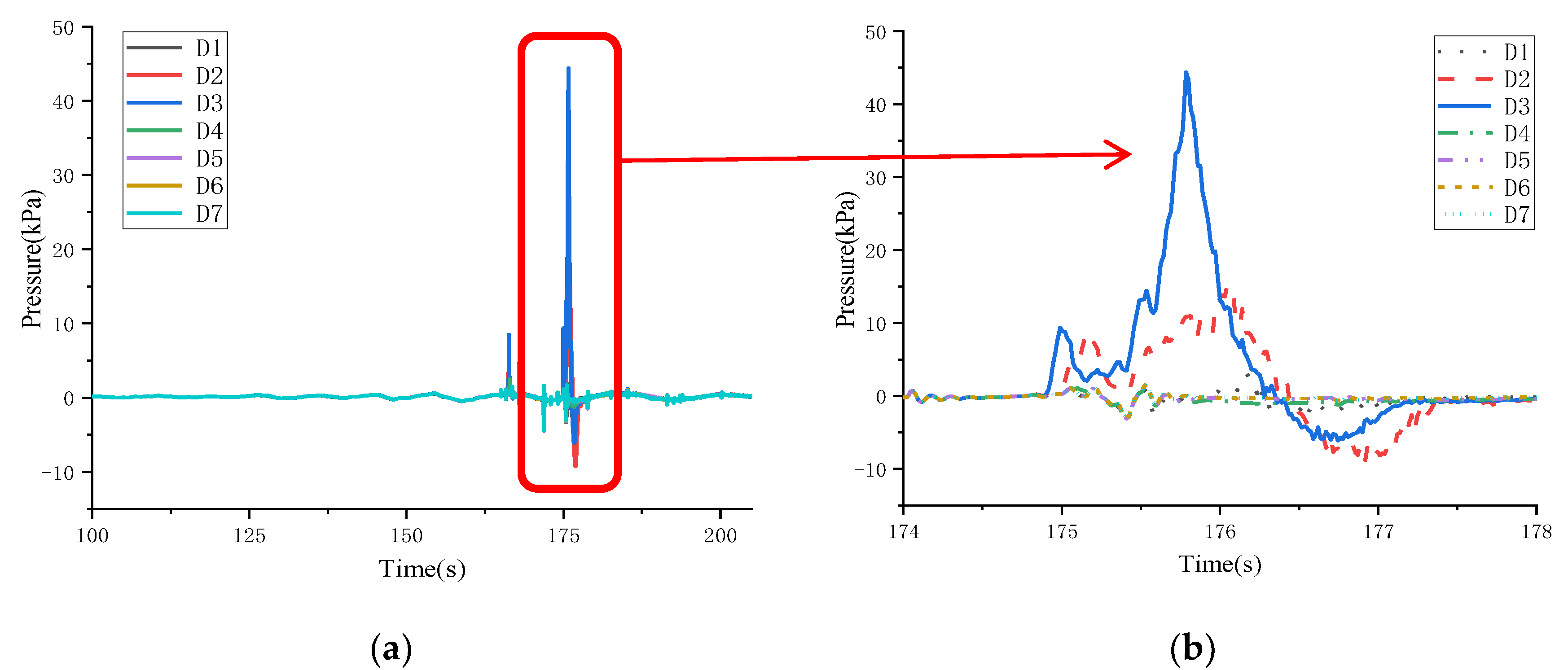
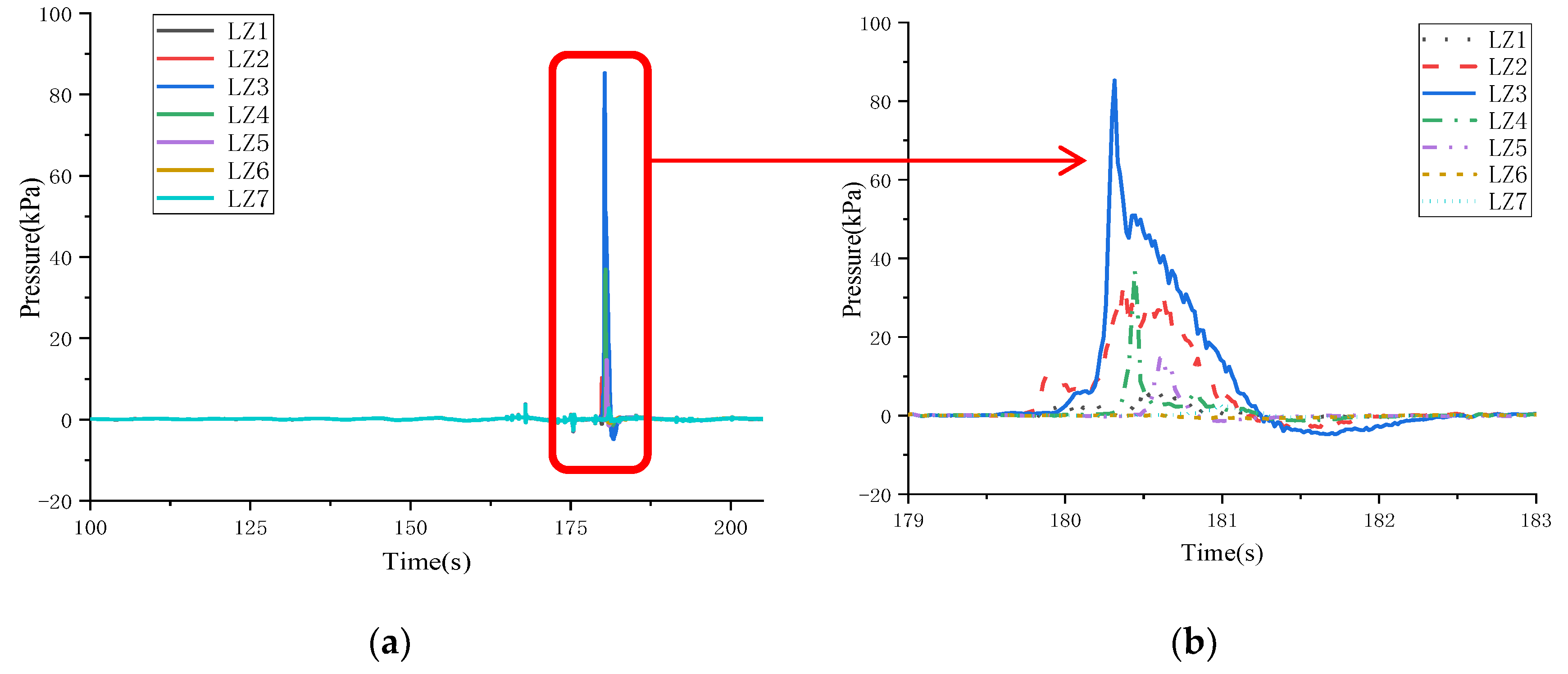
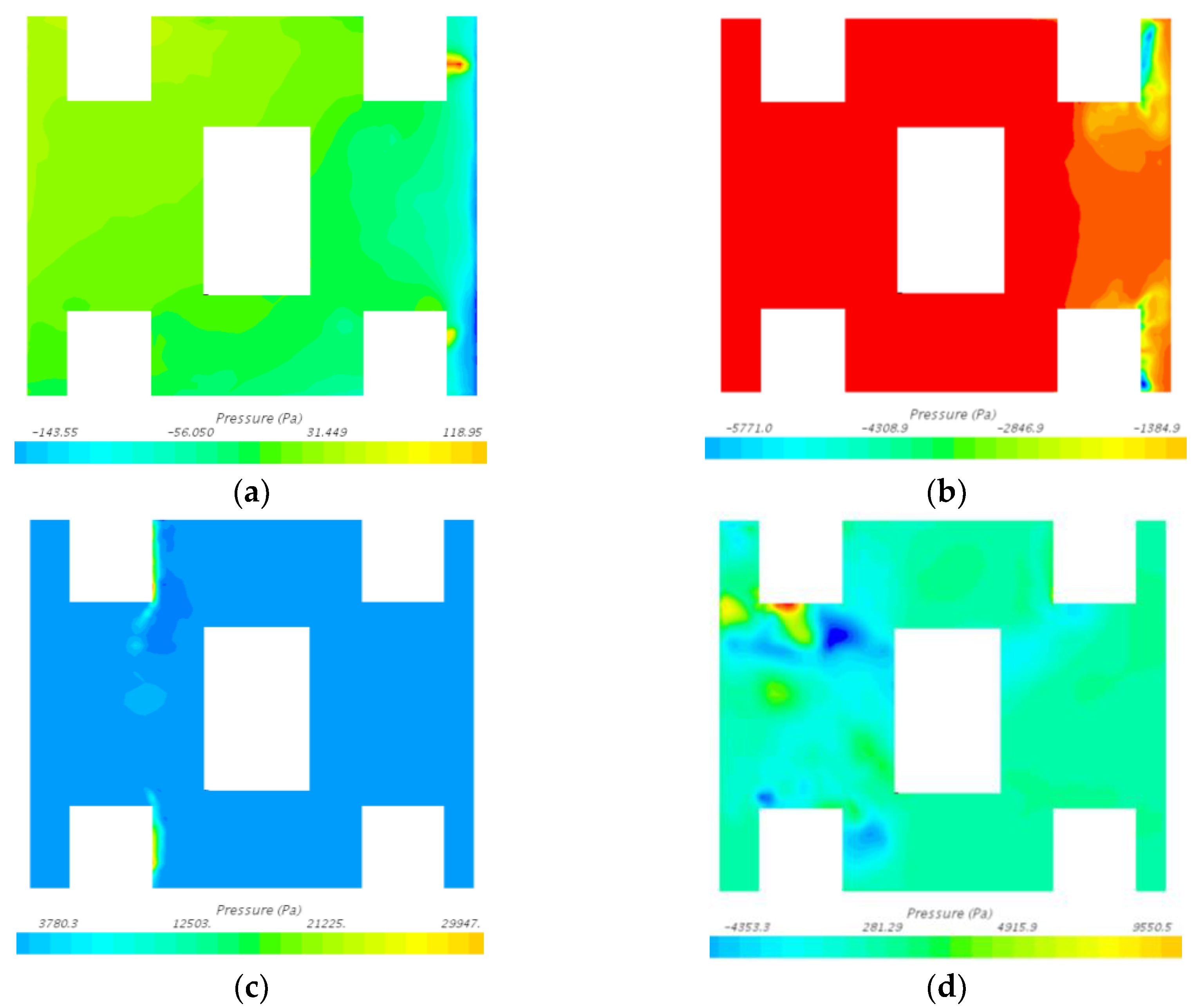
4.2.3. Deck Pressure Distribution
5. Conclusions
- (1)
- A large slamming with a value of 137.2 kPa occurs under the column near the strut, which is 287.68% greater than the normal slamming value and 73.8% and 96% greater than the two neighbor slamming values. It shows that the freak wave has strong nonlinear characteristics;
- (2)
- A negative air gap phenomenon is found at five points when analyzing the monitoring points at the bottom of deck box. The slamming pressures of the rear column (LZ2 and LZ3) are 220% and 192% of the front column (D2 and D3), respectively. This shows that the slamming of the deck on the wave face of the rear column is much larger than that on the wave face of the front column. The negative air gap appears around the column due to the wave run-up;
- (3)
- The slamming values at the same position on the wavefront side of the front column are 7.4%, −19.7%, and −19%, compared with that on the wavefront side of the rear column in beam sea. The results indicate that the nonlinear characteristics of the wavefront side of the rear column are more apparent, and the influence of the freak wave on the rear column is more incredible;
- (4)
- It is found that the part below the midpoint of the column height is easy to subject to larger slamming than other positions, and the high-stress area of slamming is generally concentrated at the junction of column and deck.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Russell, R.C.H.; Macmillian, D.H. Waves as Tides; Greenwood Press: Westport, CY, USA, 1970. [Google Scholar]
- Baarholm, R.; Faltinsen, O.M. Wave impact underneath horizontal decks. J. Mar. Sci. Technol. 2004, 9, 1–13. [Google Scholar] [CrossRef]
- Jiang, C.X.; Wang, H.; Hu, J.J.; Xu, C. Wave load model test investigation of deep sea semi-submersible platform. Ship Sci. Technol. 2017, 39, 100–104. [Google Scholar]
- Zhang, S.G.; Dick, K.P.Y.; Katsuji, T. Simulation of plunging wave impact on a vertical wall. J. Fluid Mech. 1996, 327, 221–254. [Google Scholar] [CrossRef]
- Faltinsen, O.M. Wave loads on offshore structures. Annu. Rev. Fluid Mech. 1990, 22, 35–56. [Google Scholar] [CrossRef]
- Jain, A.K. Nonlinear coupled response of offshore tension leg platforms to regular wave forces. Ocean. Eng. 1997, 24, 577–592. [Google Scholar] [CrossRef]
- Nielsen, F.G. Comparative study on air-gap under floating platforms and run-up along platform columns. Mar. Struct. 2003, 16, 97–134. [Google Scholar] [CrossRef]
- Liu, J.C.; Guo, Y.H.; Xiao, L.F.; Teng, X.Q.; Wang, J.G.; Xu, L.X.; Lu, H.D. An experimental study of wave impact loads on a drilling semi-submersible platform. Offshore Eng. Equip. Technol. 2018, 5, 234–237. [Google Scholar]
- Huo, F.L. Influence of water depth on hydrodynamic performance and wave load of semi-submersible platform. Ship Eng. 2014, 36, 100–104. [Google Scholar]
- Simos, A.N.; Sparano, J.V.; Aranha, J.A.P.; Matos, V.C.L. Second-order hydrodynamic effects on resonant heave, pitch and roll motions of a large-volume semi-submersible platform. In Proceedings of the 27th International Conference on Offshore Mechanics and Artic Engineering, Estoril, Portugal, 15–20 June 2008. [Google Scholar]
- Lwanowski, B.; Marc, L.; Wemmenhove, R. CFD simulation of wave run-up on a semi-submersible and comparison with experiment. In Proceedings of the ASME 2009 28th International Conference on Ocean, Offshore and Arctic Engineering, Honolulu, HI, USA, 31 May–5 June 2009. [Google Scholar]
- Li, J.; Huang, Z.; Tan, S.K. Extreme air-gap response below deck of floating structures. Int. J. Ocean Clim. Syst. 2010, 1, 15–26. [Google Scholar] [CrossRef]
- Jiang, Y.C.; Li, M.; Yang, S.G. A new method to simulate freak wave with fewer cosine waves. China Offshore Oil Gas 2009, 21, 138–144. [Google Scholar]
- Deng, Y.F.; Tian, X.L.; Li, X. Study on nonlinear characteristics of freak-wave Forces with different wave steepness. China Ocean. Eng. 2019, 33, 608–617. [Google Scholar] [CrossRef]
- Dyachenko, A.I.; Kachulin, D.I.; Zakharov, V.E. Probability distribution functions of freak waves: Nonlinear versus linear model. Stud. Appl. Math. 2016, 137, 189–198. [Google Scholar] [CrossRef]
- Zhang, Y.Q.; Hu, J.P.; Sheng, S.W.; Ye, Y.; You, Y.G.; Wu, B.J. Rapid Simulation of freak wave generation based on a nonlinear model. Recent Progresses in Fluid Dynamics Research. In Proceedings of the Sixth International Conference on Fluid Mechanics, Guangzhou, China, 30 June–3 July 2011. [Google Scholar]
- Gao, N.B.; Yang, J.M.; Zhao, W.H.; Li, X. Numerical simulation of deterministic freak wave sequences and wave-structure interaction. Ships Offshore Struct. 2016, 11, 802–817. [Google Scholar] [CrossRef] [Green Version]
- Huang, Y.L.; Hu, J.P.; Liu, S.H. Numerical simulation of oceanic freak waves based on FLUENT. Guangdong Shipbuild. 2017, 36, 17–20. [Google Scholar]
- Zhang, X.Y.; Hu, Z. Dynamic response of vertical plates under green water impact induced by freak waves. J. Harbin Eng. Univ. 2018, 39, 268–273. [Google Scholar]
- Zhang, W.X.; Lu, C. Analysis of response of semi-submersible platform under freak wave. Shipbuild. Technol. 2016, 5, 35–41. [Google Scholar]
- Wei, Y.F.; Liu, Z.; Xia, Z.D.; Wang, Z.N.; Wang, D.J. Model test study of wave load on a tumblehome ship in freak waves. China Shipbuild. 2020, 61, 11–19. [Google Scholar]
- Peregrine, D.H. Water-wave impact on wall. Annu. Rev. Fluid Mech. 2003, 35, 23–43. [Google Scholar] [CrossRef]
- Clauss, F.; Schmittner, C.; Hennig, J. Simulation of rogue waves and their impact on marine structures. In Proceedings of the MAXWAVE Final Meeting, Geneva, Switzerland, 8–10 October 2003. [Google Scholar]
- Dong, G.H.; Gao, X.; Mao, X.Z.; Ma, Y. Energy properties of regular water waves over horizontal bottom with increasing nonlinearity. Ocean Eng. 2020, 218, 108159. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cases | T (s) | H (m) | Cases | T (s) | H (m) |
|---|---|---|---|---|---|
| A1 | 28.56 | 0.05 | A11 | 12.08 | 0.94 |
| A2 | 25.13 | 0.30 | A12 | 11.42 | 0.84 |
| A3 | 22.44 | 0.72 | A13 | 10.83 | 0.76 |
| A4 | 20.27 | 1.08 | A14 | 10.30 | 0.68 |
| A5 | 18.48 | 1.29 | A15 | 9.82 | 0.61 |
| A6 | 16.98 | 1.35 | A16 | 9.38 | 0.55 |
| A7 | 15.71 | 1.33 | A17 | 8.98 | 0.50 |
| A8 | 14.61 | 1.25 | A18 | 8.61 | 0.45 |
| A9 | 13.66 | 1.15 | A19 | 8.27 | 0.41 |
| A10 | 12.82 | 1.04 | A20 | 7.95 | 0.38 |
| Structure Name | Actual Size | Numerical Model Size | Test Model Size | Unit |
|---|---|---|---|---|
| Buoyancy tank (L × w × h) | 104.5 × 3.9 × 10.05 | 5.225 × 0.195 × 0.5 | 1.045 × 0.039 × 0.1005 | m |
| Main deck height | 37.55 | 1.8775 | 0.3755 | m |
| Double bottom height | 29.55 | 1.4775 | 0.2955 | m |
| Center spacing of buoyancy tanks | 37.5 | 1.875 | 0.375 | m |
| Longitudinal column spacing | 55.0 | 2.7515 | 0.55 | m |
| Working draft/drainage volume | 15.5/38,400 | 0.775/4.8 | 0.155/0.0384 | m/m³ |
| Center of Gravity (m) | Center of Buoyancy (m) | Radius of Gyration (m) | ||||||
|---|---|---|---|---|---|---|---|---|
| longitudinal center of gravity (LCG) | transverse center of gravity (TCG) | vertical center of gravity (VCG) | longitudinal center of buoyance (LCB) | transverse center of buoyance (TCB) | vertical center of buoyance (VCB) | Rx | Ry | Rz |
| 0.05 | 0.0 | 23.4 | 0.1 | 0.0 | 6.5 | 29.9 | 31.6 | 34.5 |
| Monitoring Points | X (m) | Y (m) | Z (m) | Monitoring Points | X (m) | Y (m) | Z (m) |
|---|---|---|---|---|---|---|---|
| K | 35.25 | −27 | 13.55 | B4 | 27.5 | −19.25 | 21 |
| L1 | 35.25 | 24 | 12 | B5 | 27.5 | −19.25 | 24 |
| L2 | 35.25 | 24 | 14 | B6 | 27.5 | −19.25 | 27 |
| L3 | 35.25 | 24 | 16 | D1 | 35.25 | 34.75 | 29.55 |
| L4 | 35.25 | 24 | 18 | D2 | 35.25 | 28.75 | 29.55 |
| L5 | 35.25 | 24 | 20 | D3 | 35.25 | 22.75 | 29.55 |
| L6 | 35.25 | 24 | 22 | D4 | 35.25 | 16.75 | 29.55 |
| L7 | 35.25 | 24 | 24 | D5 | 35.25 | 10.75 | 29.55 |
| L8 | 35.25 | 24 | 26 | D6 | 35.25 | 4.75 | 29.55 |
| A1 | 27.5 | 34.75 | 12 | D7 | 35.25 | 0 | 29.55 |
| A2 | 27.5 | 34.75 | 15 | LZ1 | −19.75 | 34.75 | 29.55 |
| A3 | 27.5 | 34.75 | 18 | LZ2 | −19.75 | 28.75 | 29.55 |
| A4 | 27.5 | 34.75 | 21 | LZ3 | −19.75 | 22.75 | 29.55 |
| A5 | 27.5 | 34.75 | 24 | LZ4 | −19.75 | 16.75 | 29.55 |
| A6 | 27.5 | 34.75 | 27 | LZ5 | −19.75 | 10.75 | 29.55 |
| B1 | 27.5 | −19.25 | 12 | LZ6 | −19.75 | 4.75 | 29.55 |
| B2 | 27.5 | −19.25 | 15 | LZ7 | −19.75 | 0 | 29.55 |
| B3 | 27.5 | −19.25 | 18 | ||||
| Parameter | Label | Conversion Coefficient |
|---|---|---|
| Length | Ls/Lm | α |
| Area | As/Am | α2 |
| Period | Ts/Tm | α1/2 |
| Force | Fs/Fm | γα3 |
| Type | Diameter (mm) | Wet Weight (kg/m) | Dry Weight (kg/m) | Axial Rigidity (N) | Breaking Strength (N) |
|---|---|---|---|---|---|
| Entity | 114 | 7 | 0.3 | 2.57 × 108 | 7.35 × 106 |
| Degrees of Freedom | Model Period (s) | Numerical Simulation Period (s) | Error Percentage |
|---|---|---|---|
| Heave | 20.3 | 20.9 | 2.96% |
| Roll | 33.6 | 33.8 | 0.6% |
| Pitch | 30.0 | 29.9 | −0.33% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huo, F.; Yang, H.; Yao, Z.; An, K.; Xu, S. Study on Slamming Pressure Characteristics of Platform under Freak Wave. J. Mar. Sci. Eng. 2021, 9, 1266. https://doi.org/10.3390/jmse9111266
Huo F, Yang H, Yao Z, An K, Xu S. Study on Slamming Pressure Characteristics of Platform under Freak Wave. Journal of Marine Science and Engineering. 2021; 9(11):1266. https://doi.org/10.3390/jmse9111266
Chicago/Turabian StyleHuo, Fali, Hongkun Yang, Zhi Yao, Kang An, and Sheng Xu. 2021. "Study on Slamming Pressure Characteristics of Platform under Freak Wave" Journal of Marine Science and Engineering 9, no. 11: 1266. https://doi.org/10.3390/jmse9111266
APA StyleHuo, F., Yang, H., Yao, Z., An, K., & Xu, S. (2021). Study on Slamming Pressure Characteristics of Platform under Freak Wave. Journal of Marine Science and Engineering, 9(11), 1266. https://doi.org/10.3390/jmse9111266