1. Introduction
In recent years, with the rapid development of the offshore wind power industry, the offshore floating wind turbine (OFWT) has been widely studied and applied [
1,
2,
3,
4]. When operating in natural marine environmental conditions, an OFWT will inevitably experience yawed inflow [
5,
6]. Under the yawed inflow conditions, the aerodynamics of the OFWT become rather complicated and difficult to obtain, which will bring great challenges to its control in practical engineering [
6,
7]. As one of the most crucial aerodynamics, the thrust characteristic of the wind rotor is also significantly influenced because the normal force at each blade section used to calculate the thrust varies with the dynamic angle of attack at different azimuths in the yawed inflow conditions [
8]. The thrust characteristic is important for two main reasons. On the one hand, the thrust characteristic of an OFWT is closely related to its wake’s expansion and wind velocity distribution [
9,
10,
11,
12]. As the wake is disturbed, not only the aerodynamics of the OFWT itself but also the aerodynamics of its downstream OFWTs can be deeply influenced [
13]. On the other hand, the thrust characteristic of an OFWT is also related to its dynamic characteristics because the thrust is a critical external excitation of the wind turbine system [
14,
15]. Unfortunately, investigations on the thrust characteristic are still scarce, especially under complex conditions like the yawed inflow.
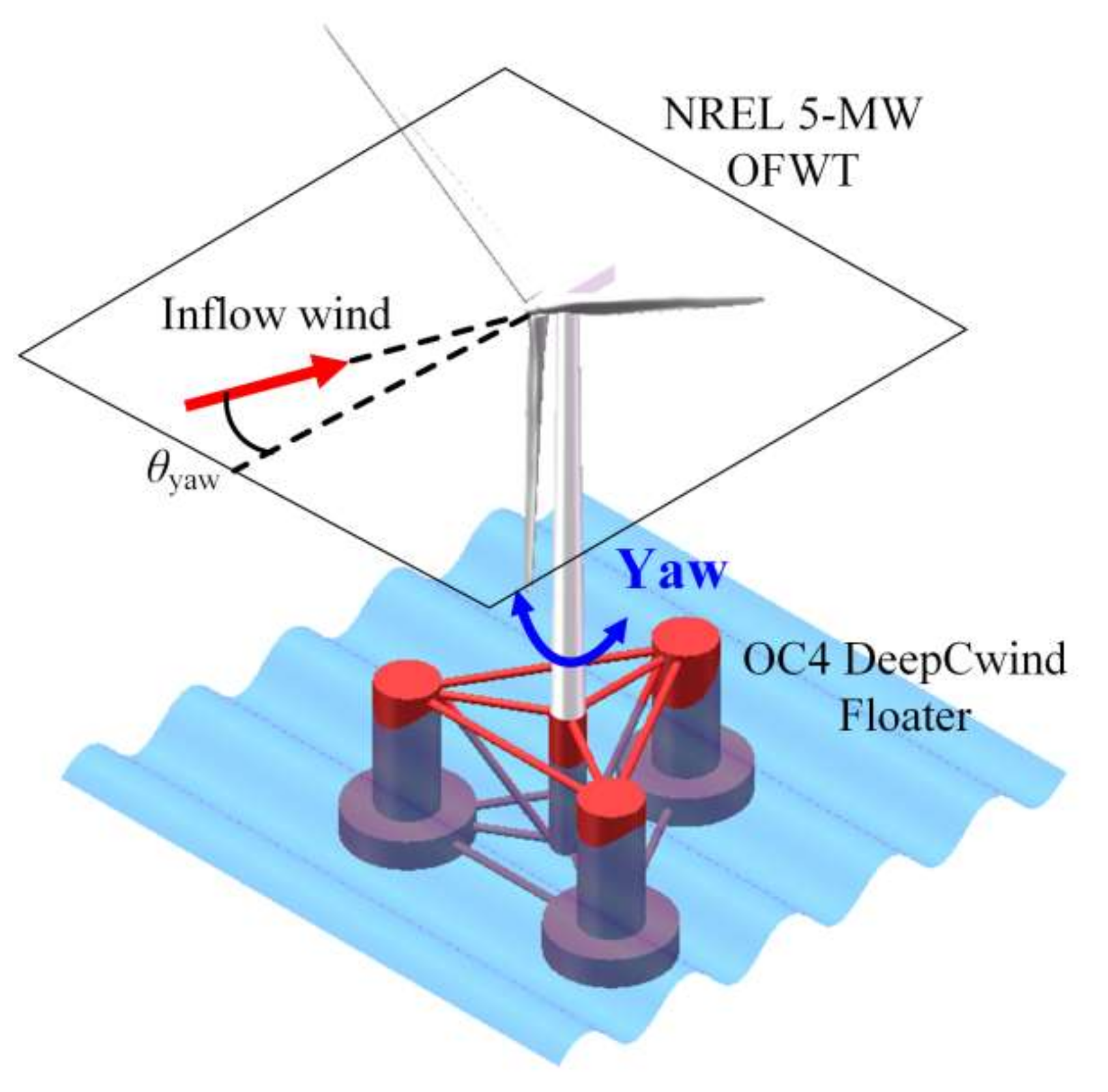
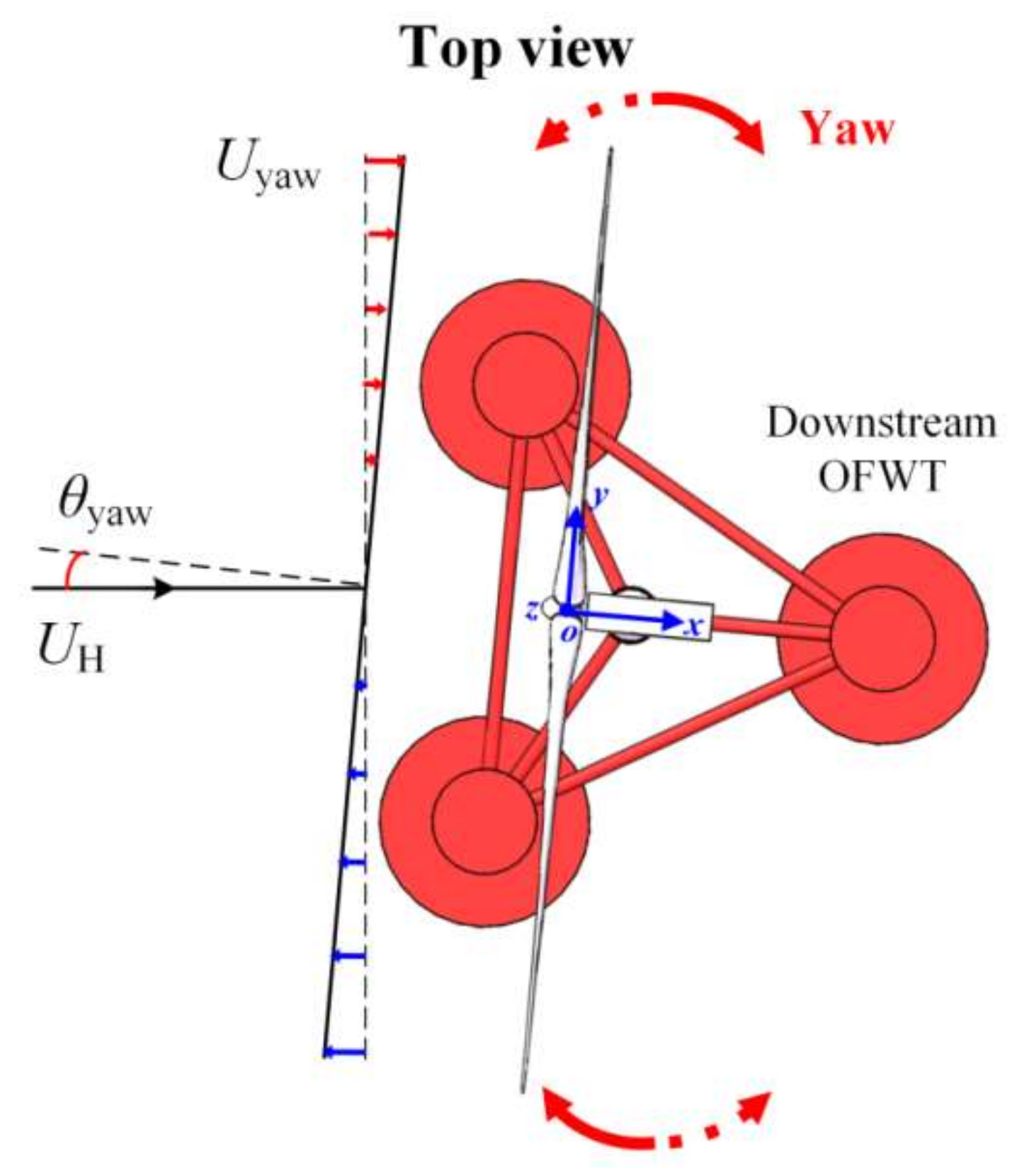
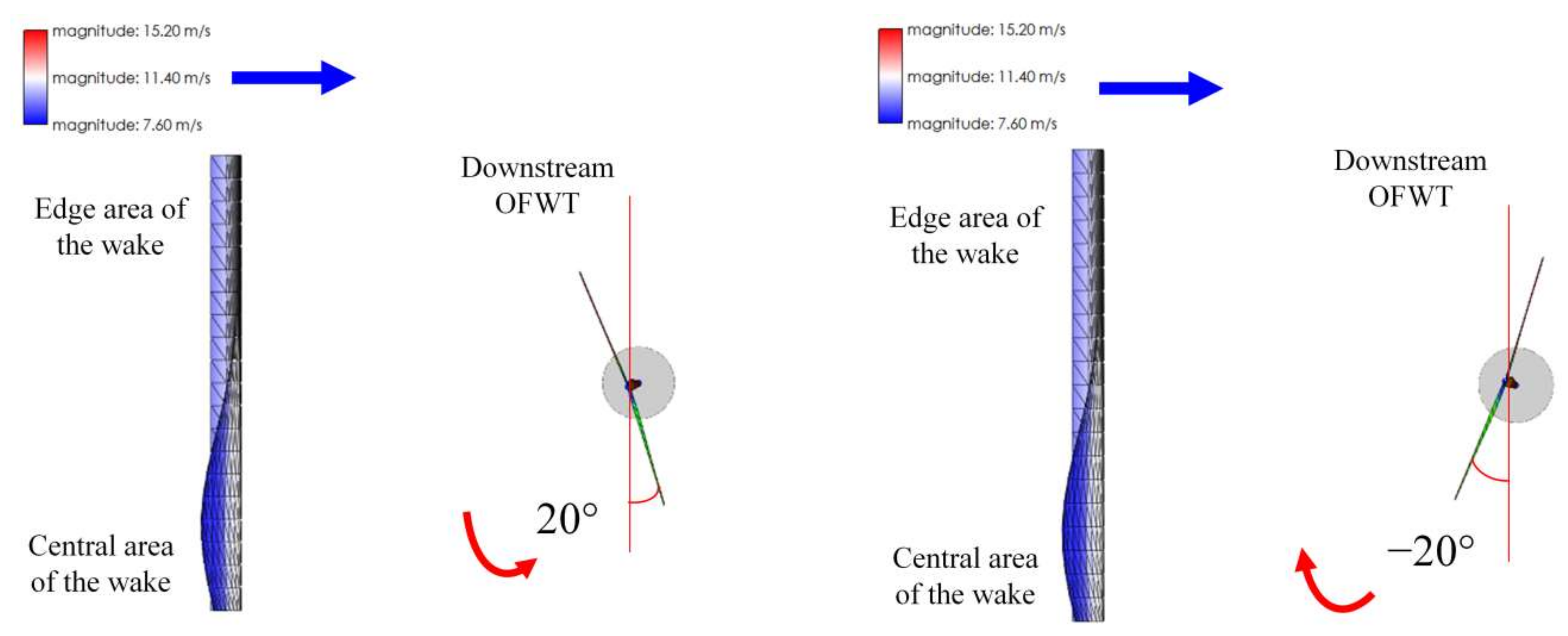
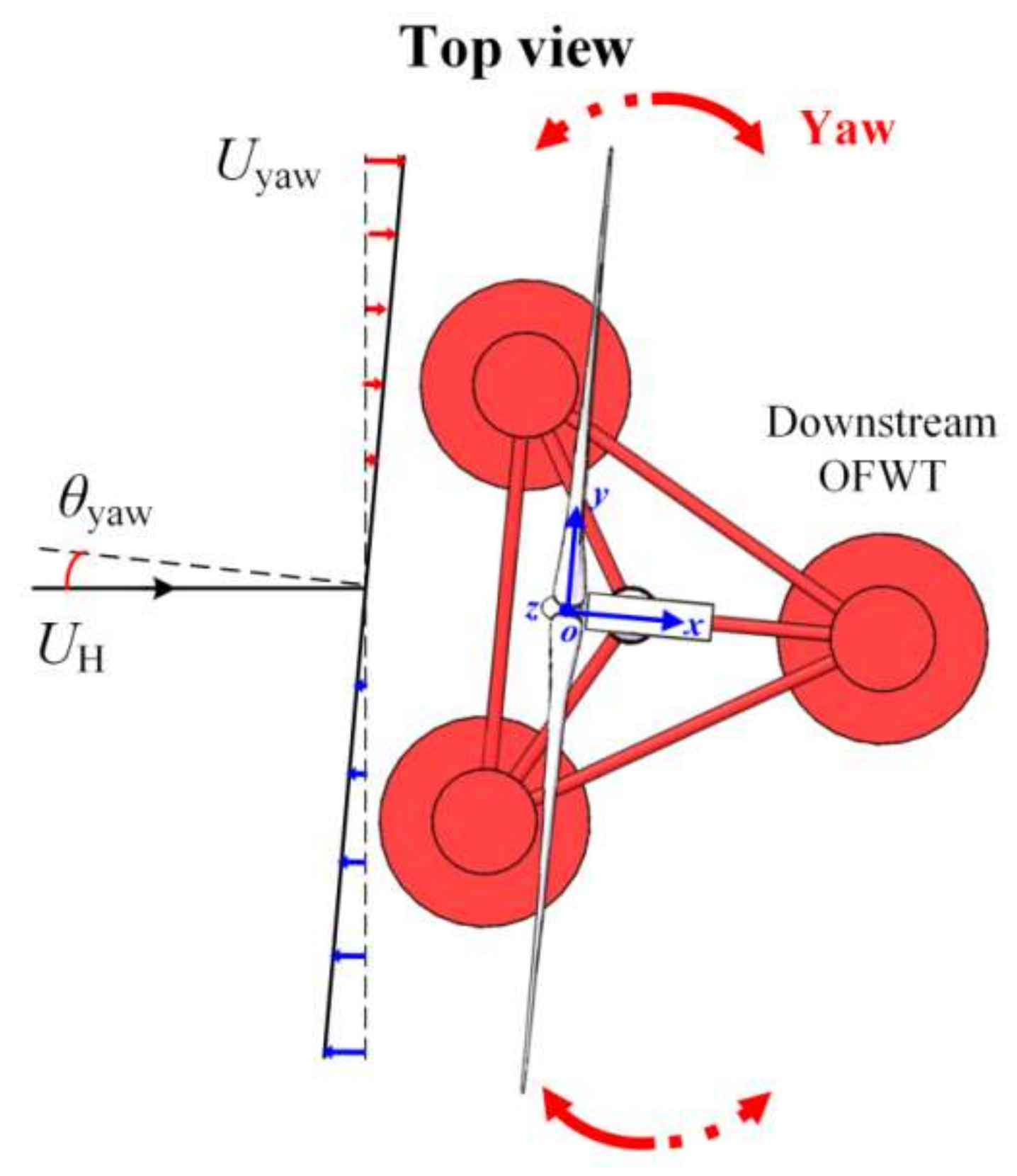
The yawed inflow condition refers to that there is an included angle between the inflow wind direction and the vertical direction of the wind rotor plane, that is, the yawed angle
θyaw. This kind of inflow conditions can be divided into dynamic yawed inflow condition and static yawed inflow condition. The dynamic yawed inflow condition is caused by the platform yaw motions. When the OFWT operates with platform yaw motions, the yawed angle varies in the time domain [
16,
17,
18]. To clarify the influences of the yaw motions, Qiu et al. [
19] used the free-vortex method to predict the unsteady aerodynamic loads of wind turbines. They found that the shaft torque of the blade could be significantly affected by the yaw motions. Besides, Tran et al. [
20] applied the blade element momentum (BEM) and the computational fluid dynamics (CFD) methods to investigate the aerodynamics of an OFWT. They detected that the blade-tip vortices were generated in the process of yaw motions, which could make the aerodynamic loads complicated. However, the knowledge about the influences of the dynamic yawed inflow condition on the aerodynamics of an OFWT is still limited. As for the static yawed inflow condition, it is caused by the changes of the incoming wind direction [
21,
22] or the wind rotor facing direction [
23,
24,
25]. When these phenomena happen, a fixed yawed angle is generated. Extensive investigations about the static yawed inflow condition have been done [
8]. Greco et al. [
26] used a free-wake panel method to investigate the aerodynamic performance of a horizontal wind turbine in the static yawed inflow condition. Bangga et al. [
27] used CFD and BEM methods to predict the aerodynamic loads on a 2.3 MW wind turbine rotor in three different inflow cases considering the static yawed inflow condition. Both the above two investigations indicated that the static yawed inflow condition has significant influences on the aerodynamics of an OFWT. In addition, Wen et al. [
16] pointed out that the static yawed inflow condition could reduce the energy conversion efficiency due to the reduction of effective wind area. Other investigations about the static yawed inflow condition focus on its influences on the OFWT’s wake. Lee et al. [
25] conducted a numerical simulation on the National Renewable Energy Laboratory (NREL) Phase VI wind turbine model based on the nonlinear vortex lattice method. They found that the static yawed inflow condition could make the wake skewed, which would finally affect the aerodynamic behavior of the wind turbine. Bastankhah et al. [
28,
29,
30] conducted wind tunnel measurements to study the wake characteristics of a wind turbine with different static yawed angles. They found that the static yawed angles could reduce the wake velocity deficit while increase the wake deflection.
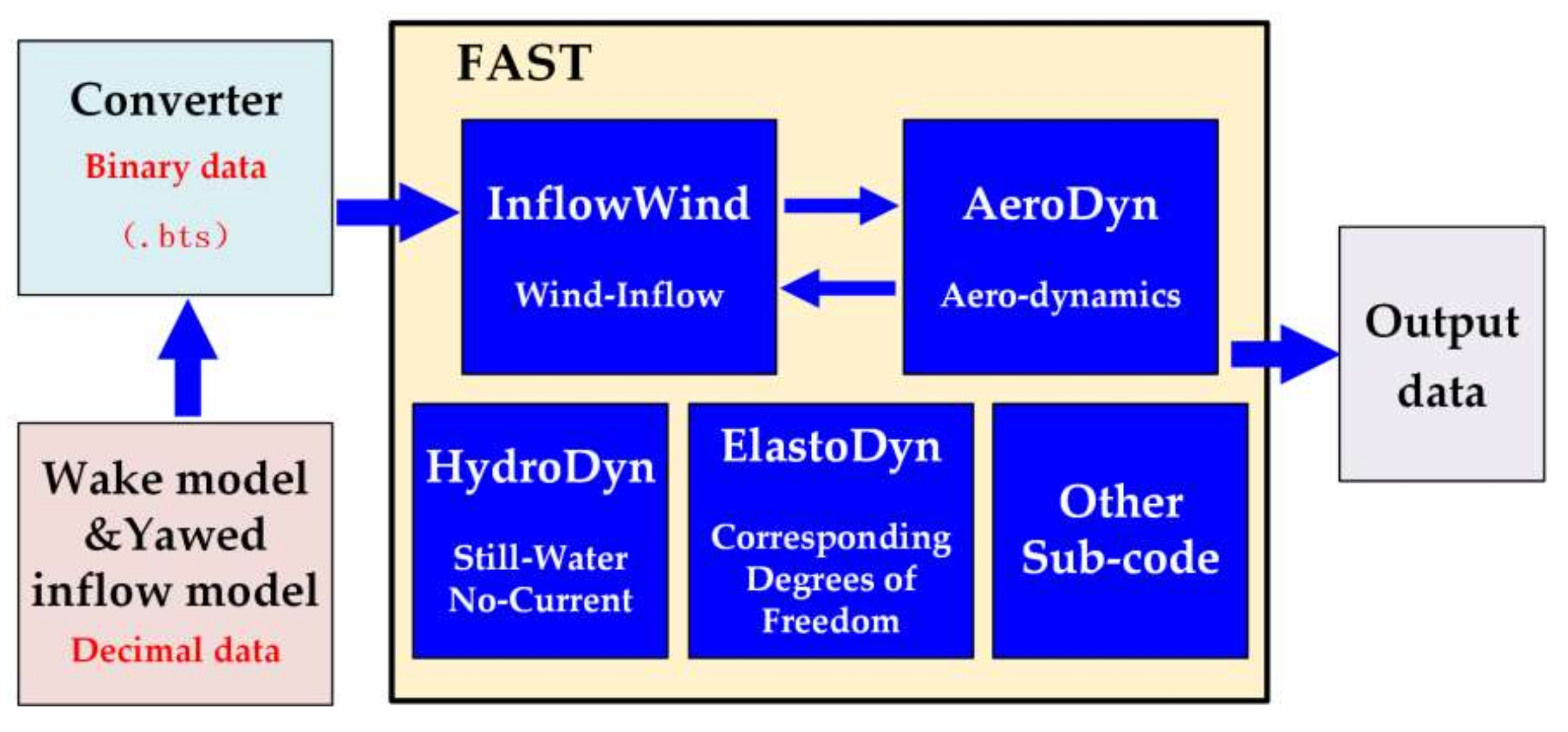
Based on the above literature reviews, there are two major limitations of the existing investigations. Firstly, the existing investigations on the aerodynamics under the yawed inflow conditions are mostly based on an isolated solo OFWT, without considering the influences of the upstream wake in the wind farm. With the gradual large-scale applications of the OFWT, the upstream wake conditions, especially the typical wake conditions under specific wind farm layouts, should be considered in the aerodynamics calculations of a downstream OFWT. Secondly, most existing investigations only focus on the aerodynamics under the dynamic yawed inflow condition or the static yawed inflow condition, and seldom consider the coupled condition of the two yawed inflow. It should be noted that due to the randomness of wave and wind directions in the environment and the hysteresis of yaw control system of the OFWT, the coupled condition of the two yawed inflow is quite likely to come into being. The drawbacks mentioned above result in the motivation of the present study: to investigate the thrust characteristics of a wake-influenced OFWT under dynamic yawed inflow, static yawed inflow, and coupled yawed inflow conditions. To achieve this investigation, the yawed inflow and the wake characterizations are integrated into the numerical method based on the BEM theory, and then simulations applying the FAST code (an open source simulation code defined by “Fatigue”, “Aerodynamic”, “Structure”, and “Turbulence”) are carried out for a typical semi-submersible OFWT. According to the simulation results, the thrust characteristics in typical wake flow under the three yawed inflow conditions are analyzed and discussed. Finally, a series of experimental tests are conducted to validate the analyses of simulations. The innovation of this method lies in that it can achieve the correct calculation of yawed inflow aerodynamics for the downstream OFWT.
The rest of this paper is organized as follows. In
Section 2, the characterization of the yawed inflow conditions, the calculation method of aerodynamics in wake cases, the application of FAST and the simulation setups are described. In
Section 3, the results of the thrust characteristics under different yawed inflow conditions from the simulations are analyzed and discussed. In
Section 4, the experimental tests are set up to validate the analyses of simulations. Finally, in
Section 5, the main conclusions of this paper are summarized.
5. Conclusions
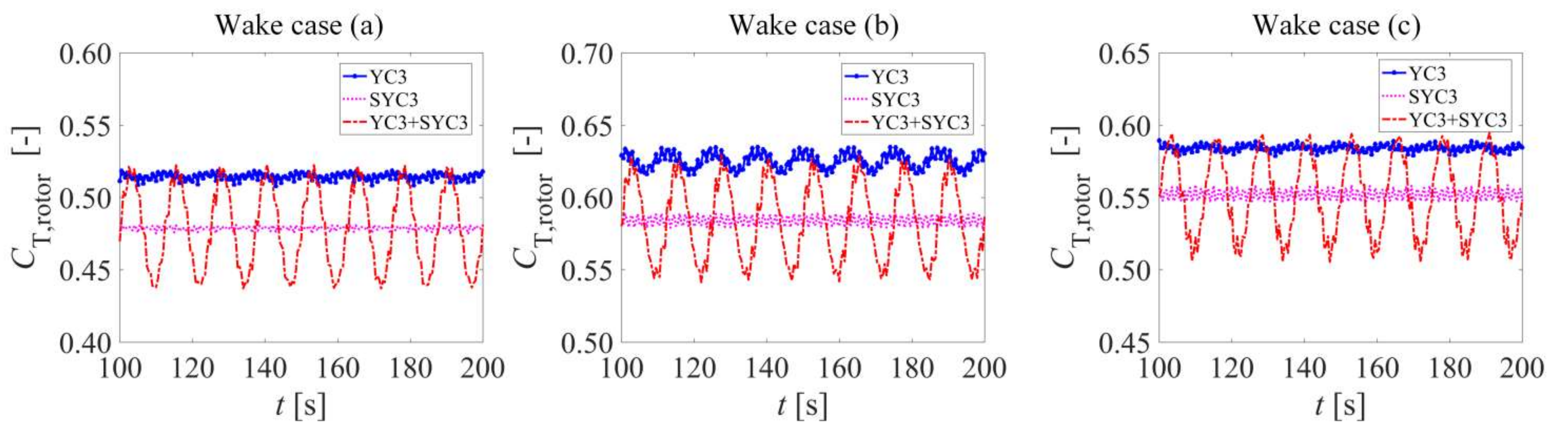
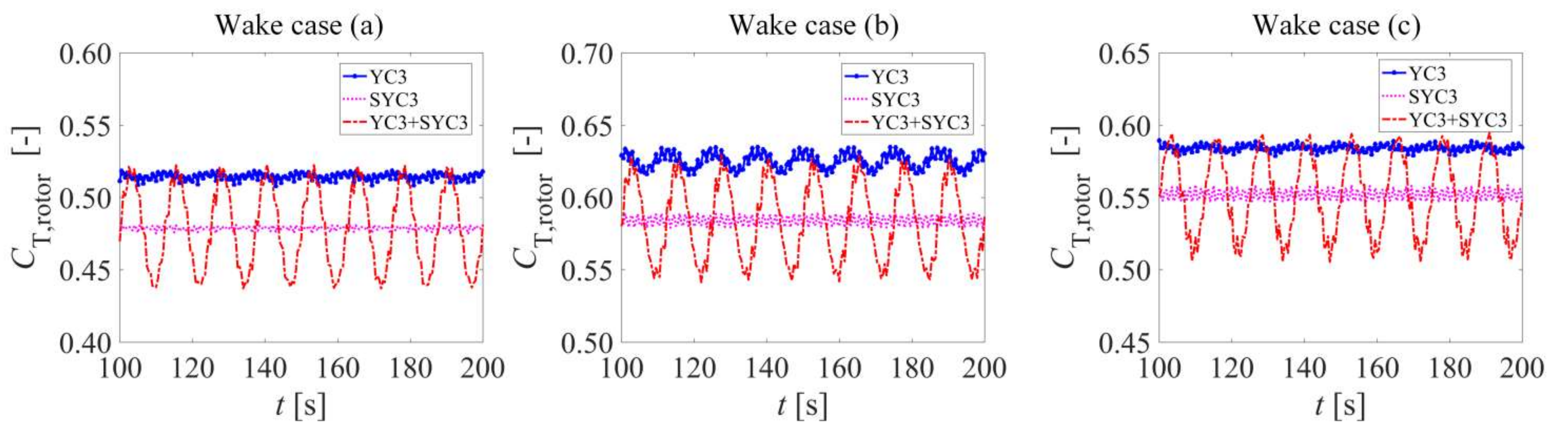
In this study, the aerodynamics of a downstream NREL 5-MW OFWT in the wake flow under dynamic, static, and coupled yawed inflow conditions are investigated based on the FAST simulations. According to the simulation results, the three yawed inflow conditions have more significant influences on the thrust characteristics in wake case (b) than in wake cases (a) and (c). Thus the following discussions are all conducted in wake case (b).
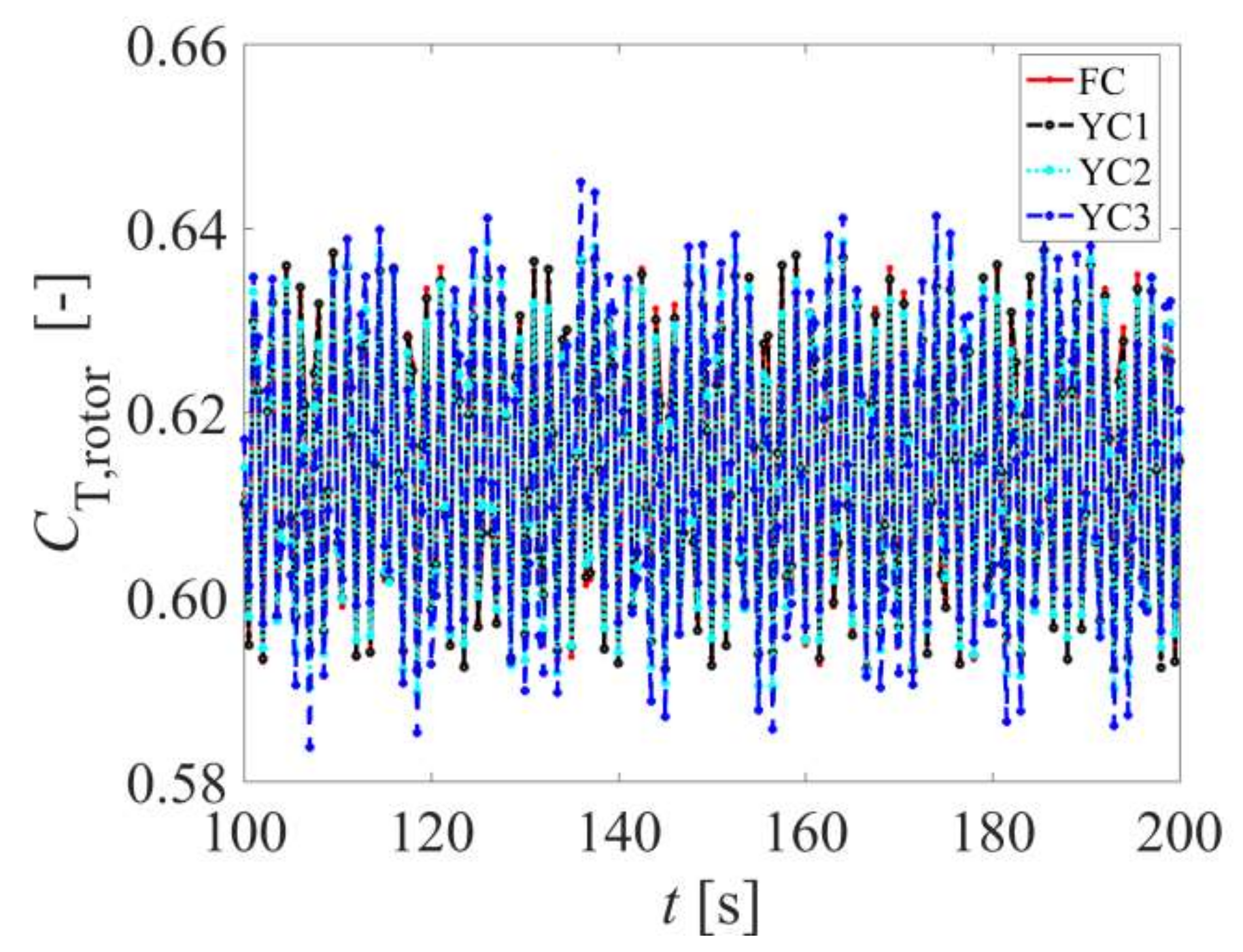
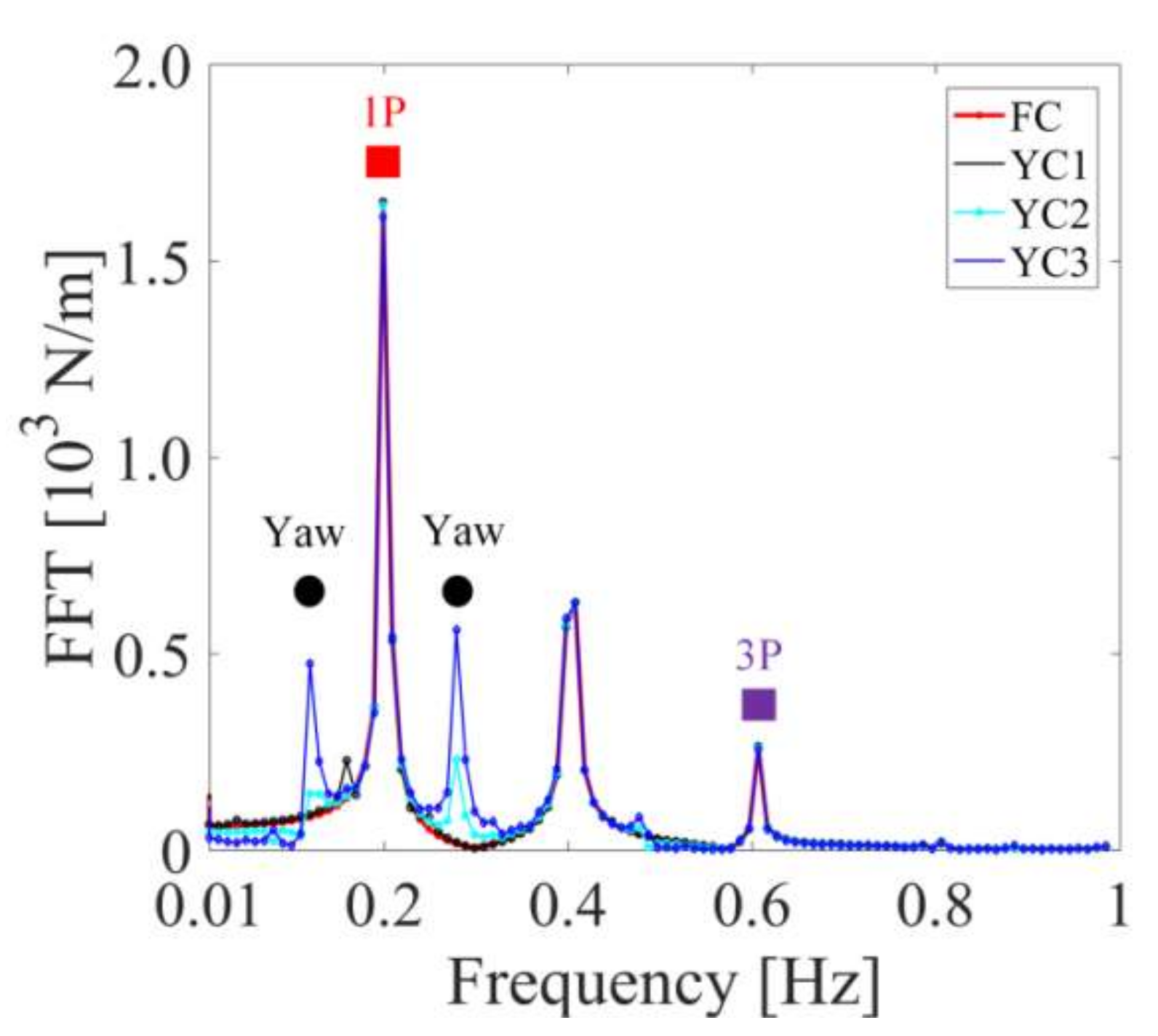
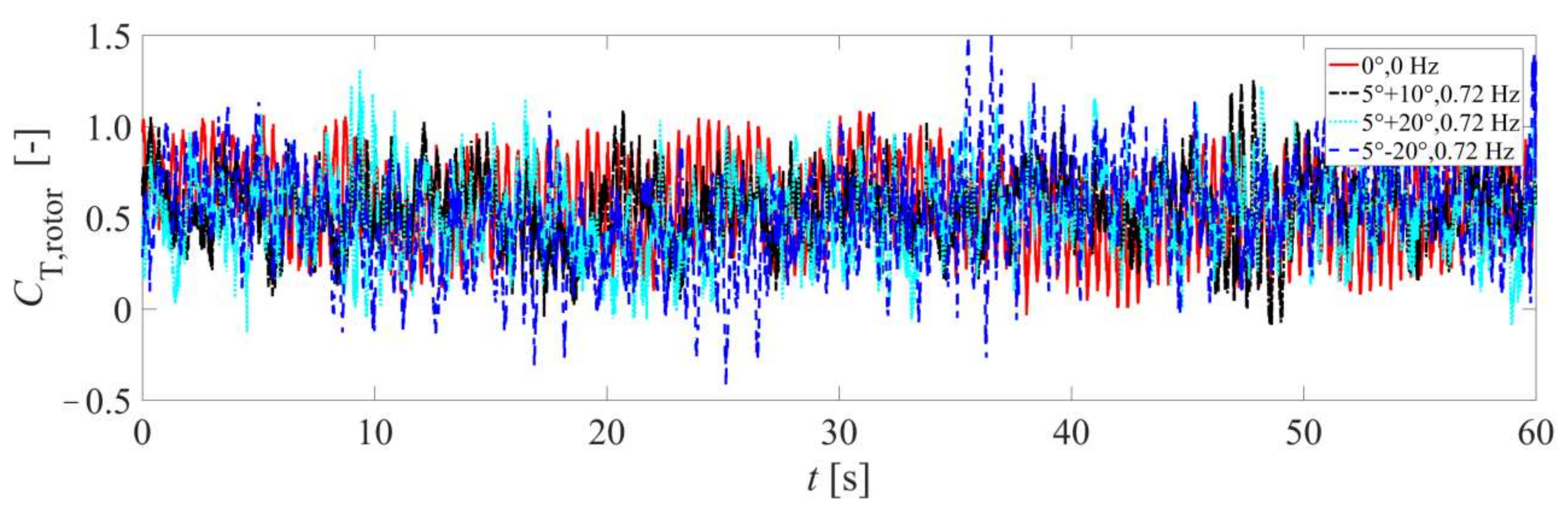
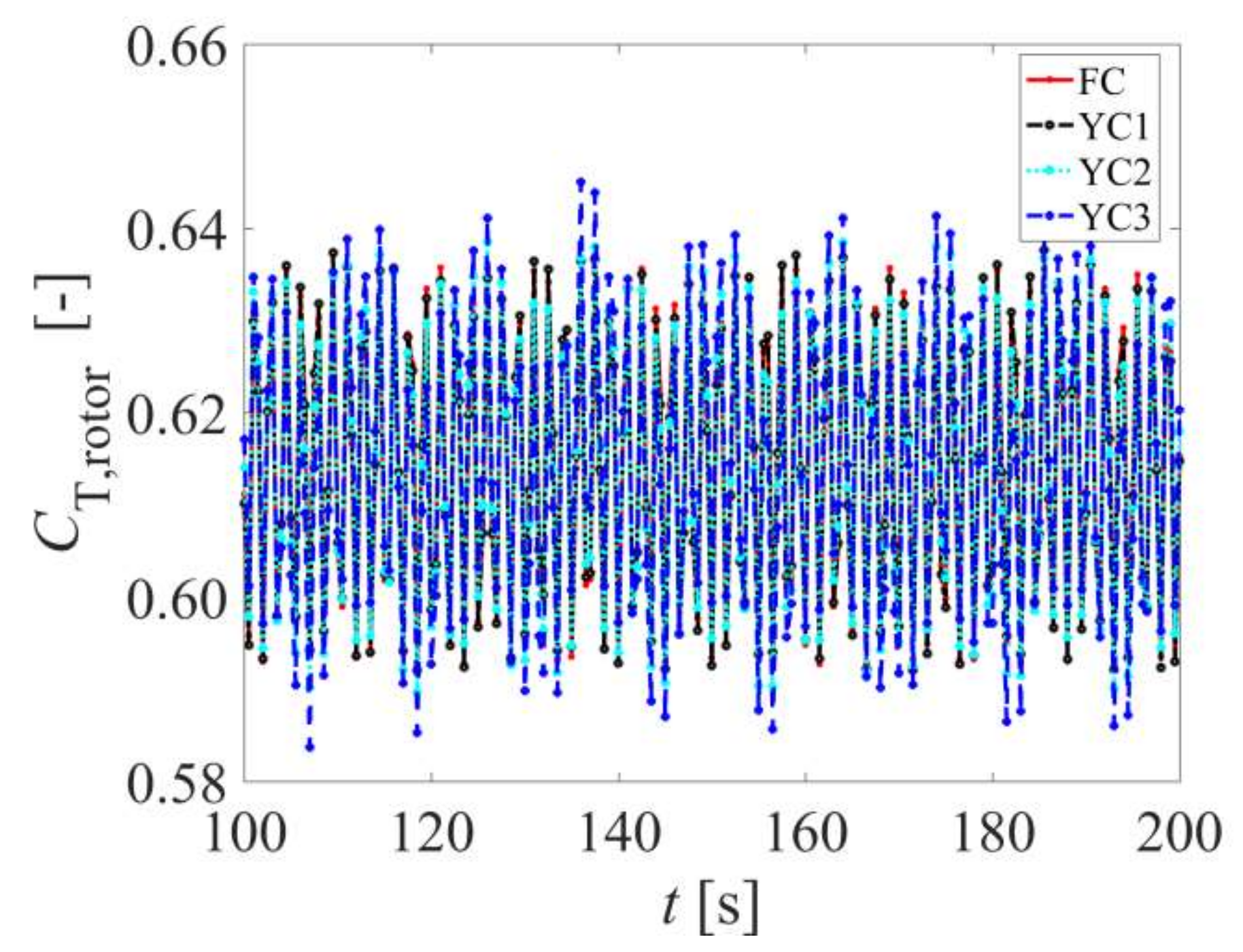
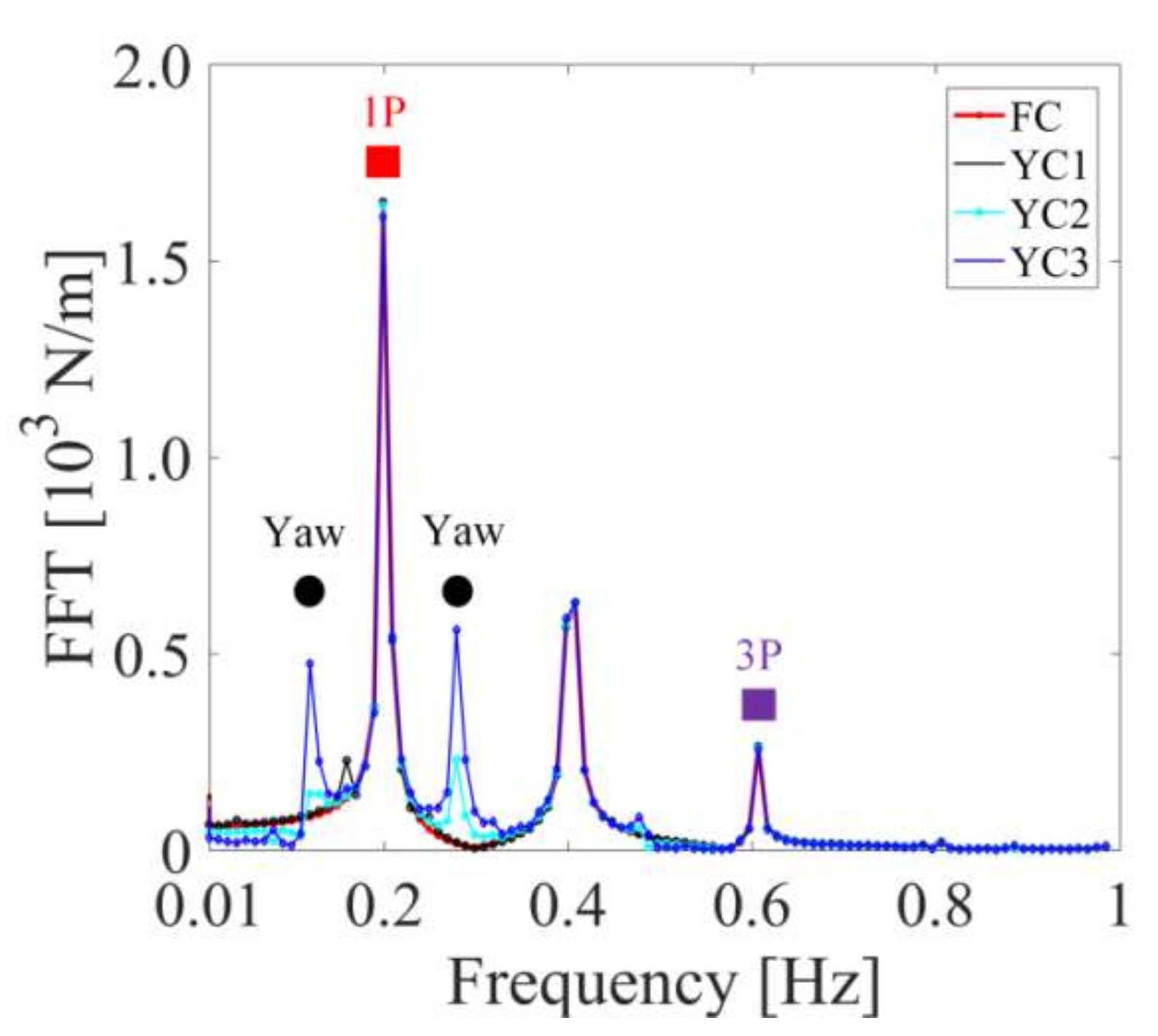
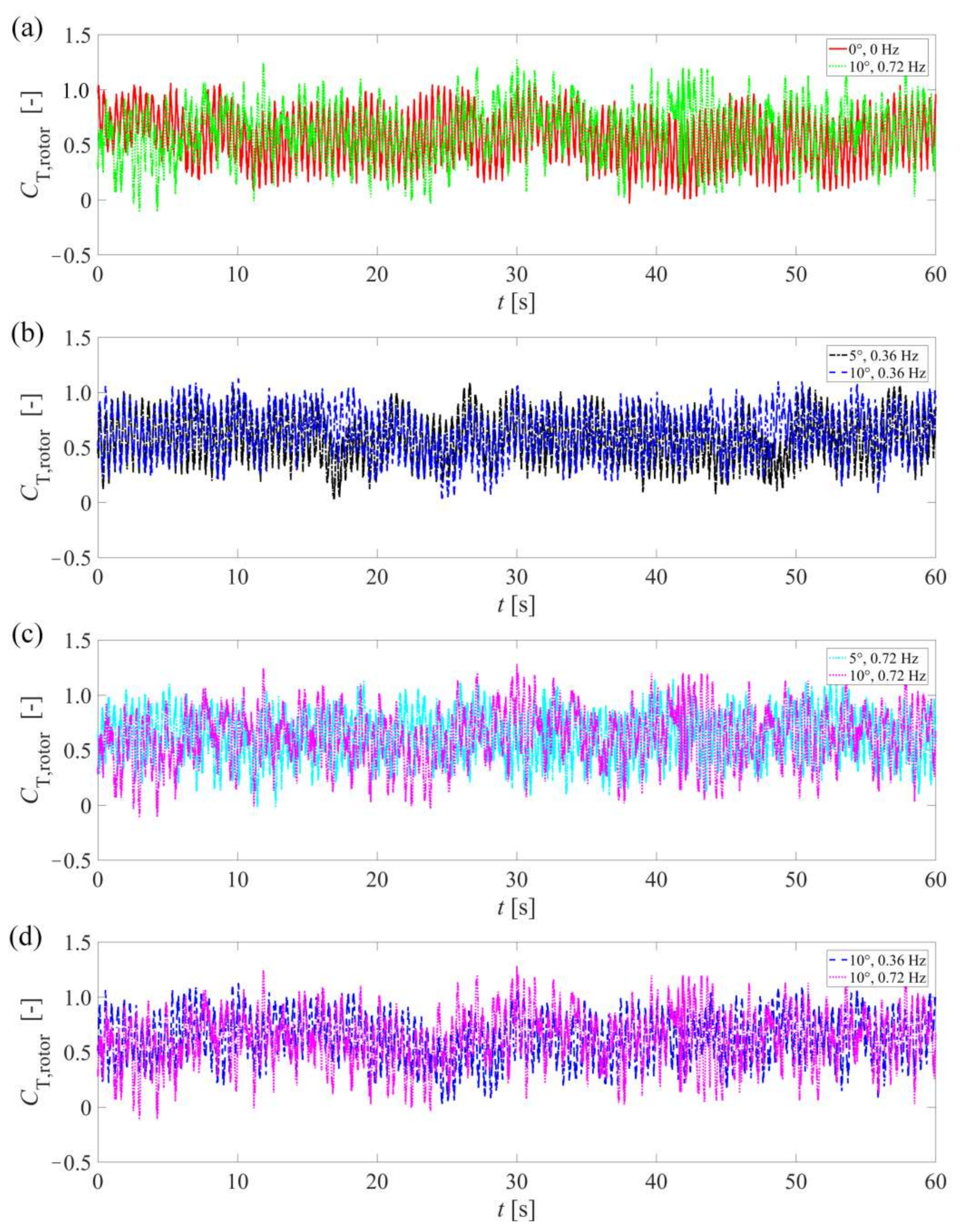
For the dynamic yawed inflow conditions, the thrust coefficient fluctuates more violently with the increment of the yaw motion frequency and amplitude. The normal forces present similar trends, but the normal force near the blade tip fluctuates more violently and complicatedly than that near the blade root. Significant components can be observed around the 1P of FFT of normal force, which indicates higher yaw motion frequency and amplitude are not conducive to the safety of the OFWT structure.
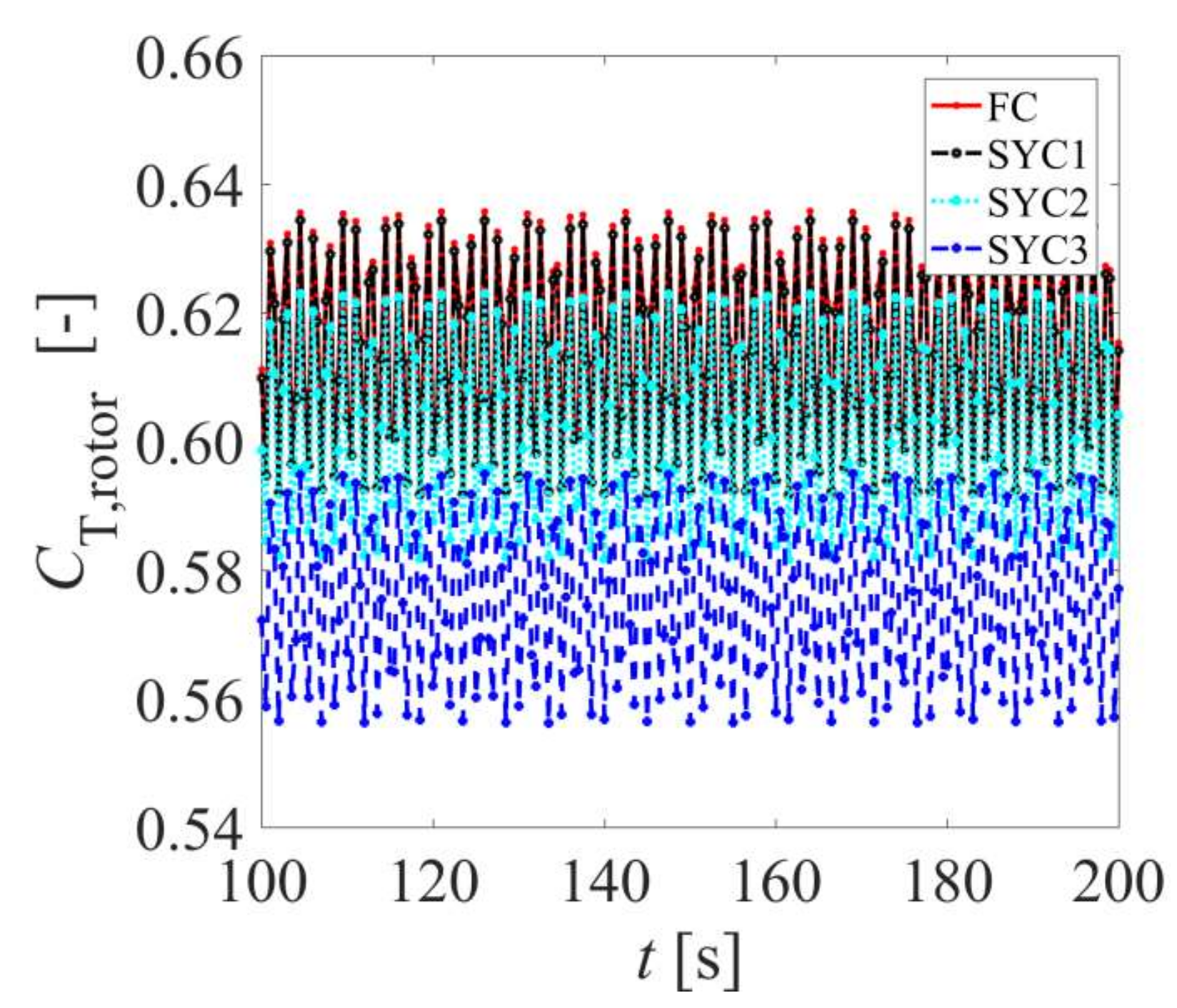
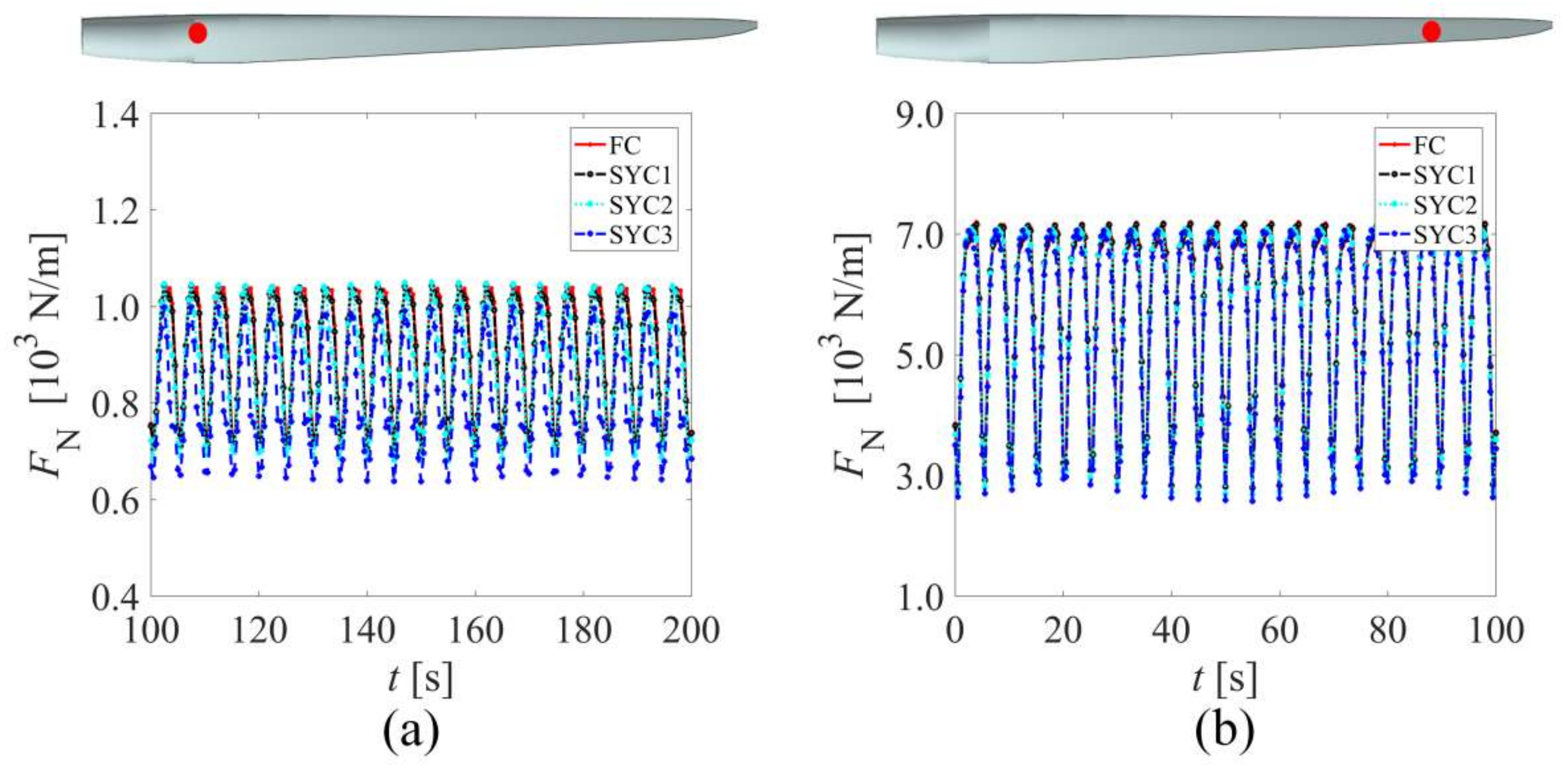
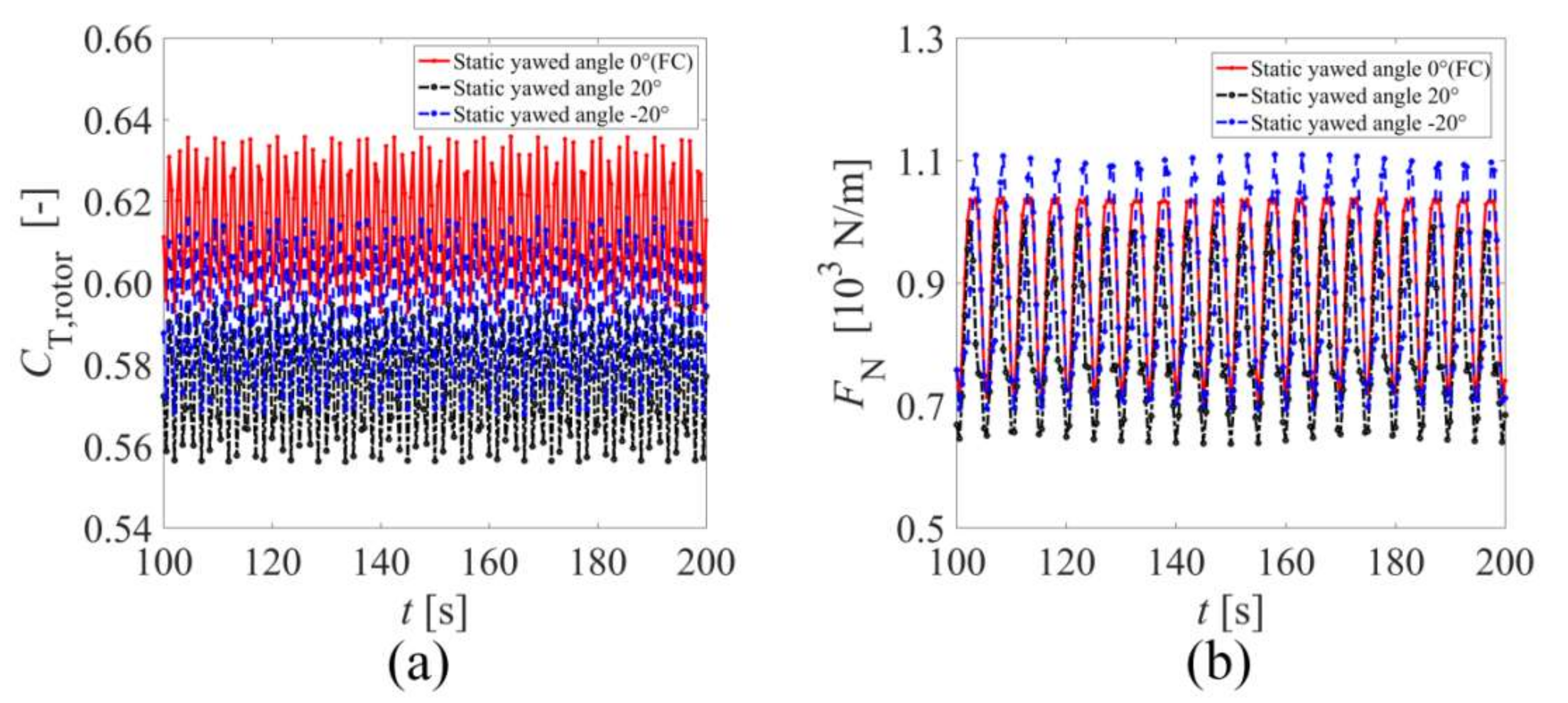
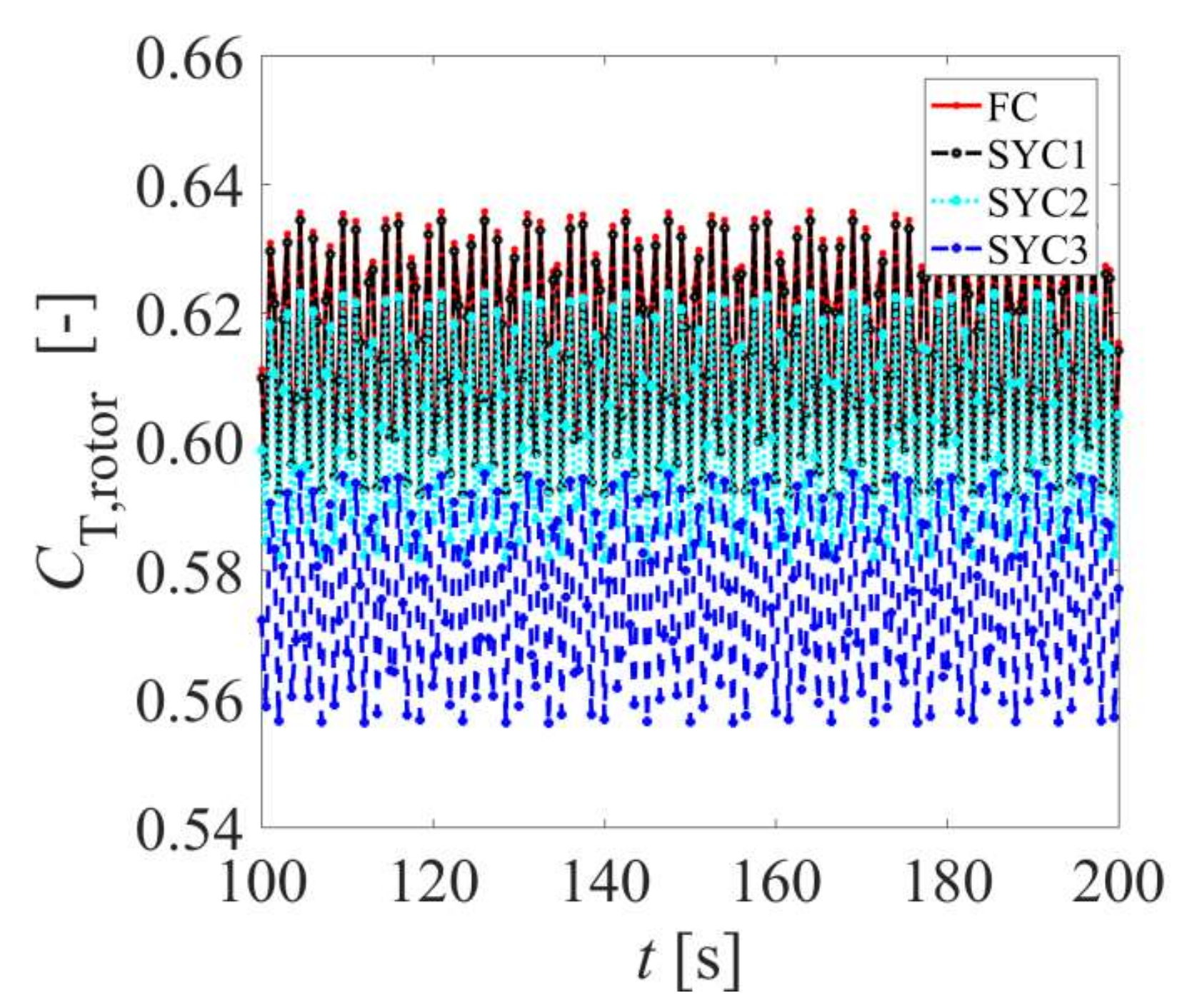
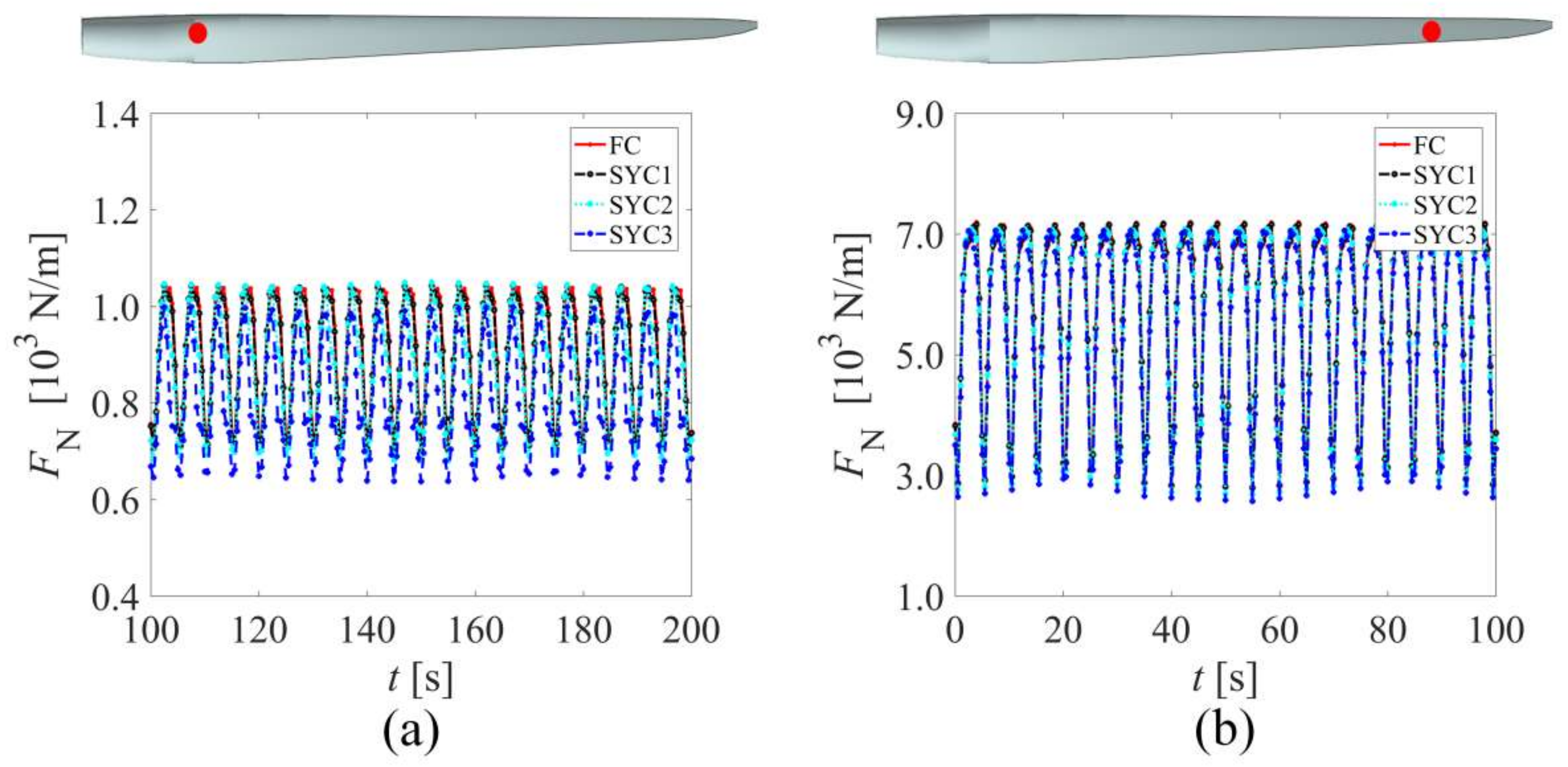
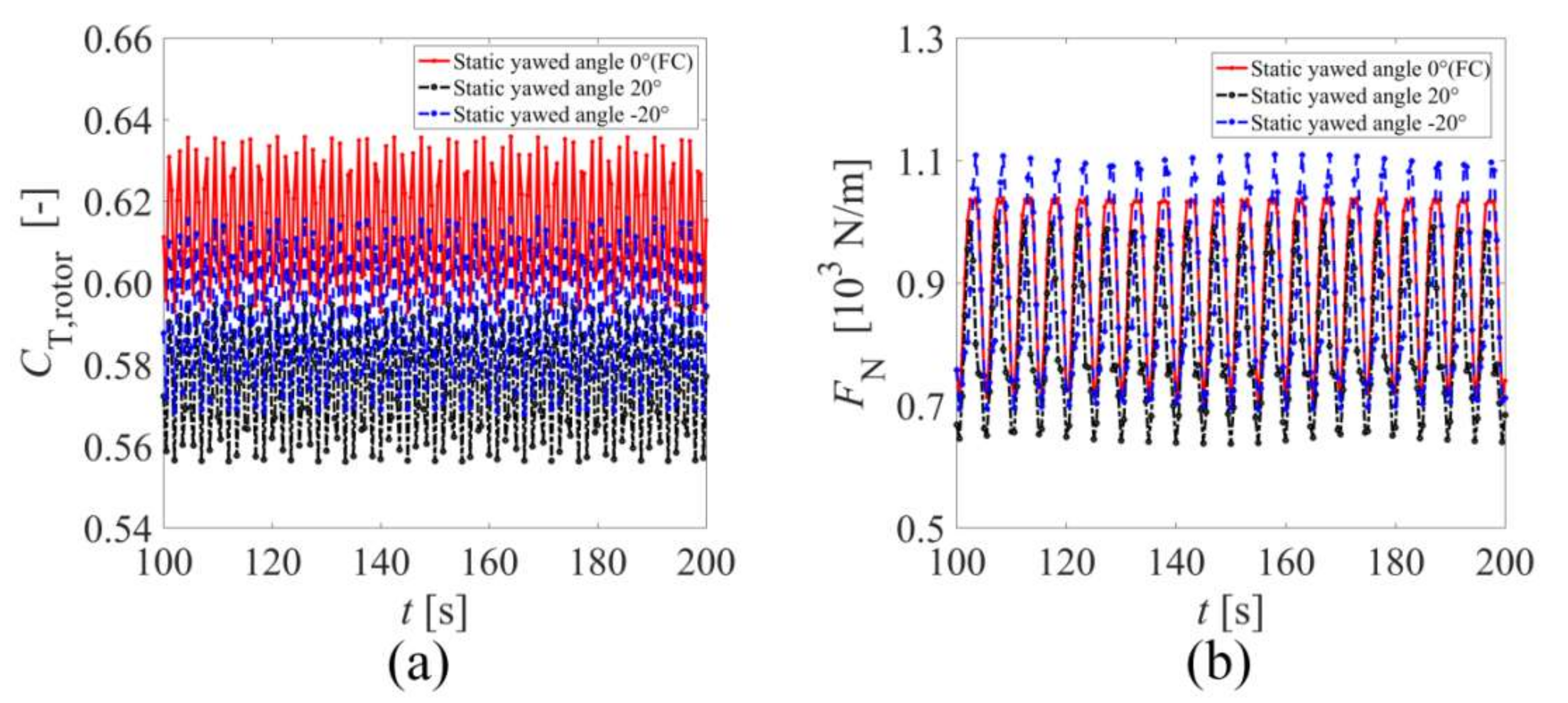
For the static yawed inflow conditions, the thrust coefficient decreases with the increment of the yawed angle, but the fluctuation does not change much. The normal forces present similar trends, but the normal force near the blade root is reduced more than that near the blade tip. Both the thrust coefficient and the normal force under the negative static yawed angle are larger than those under the corresponding positive one.
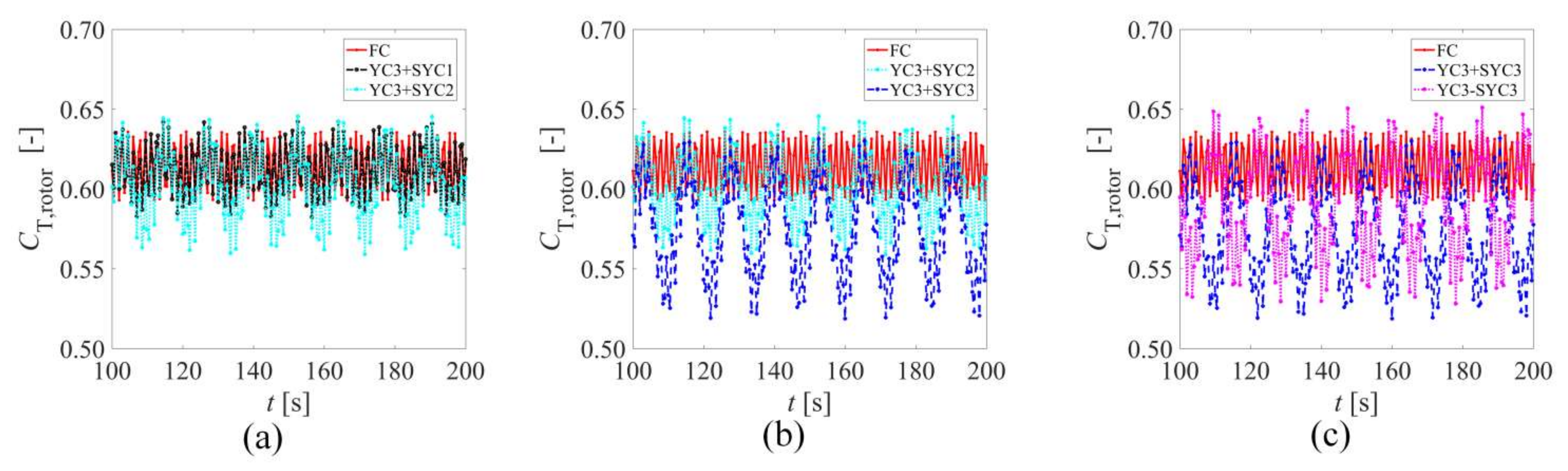
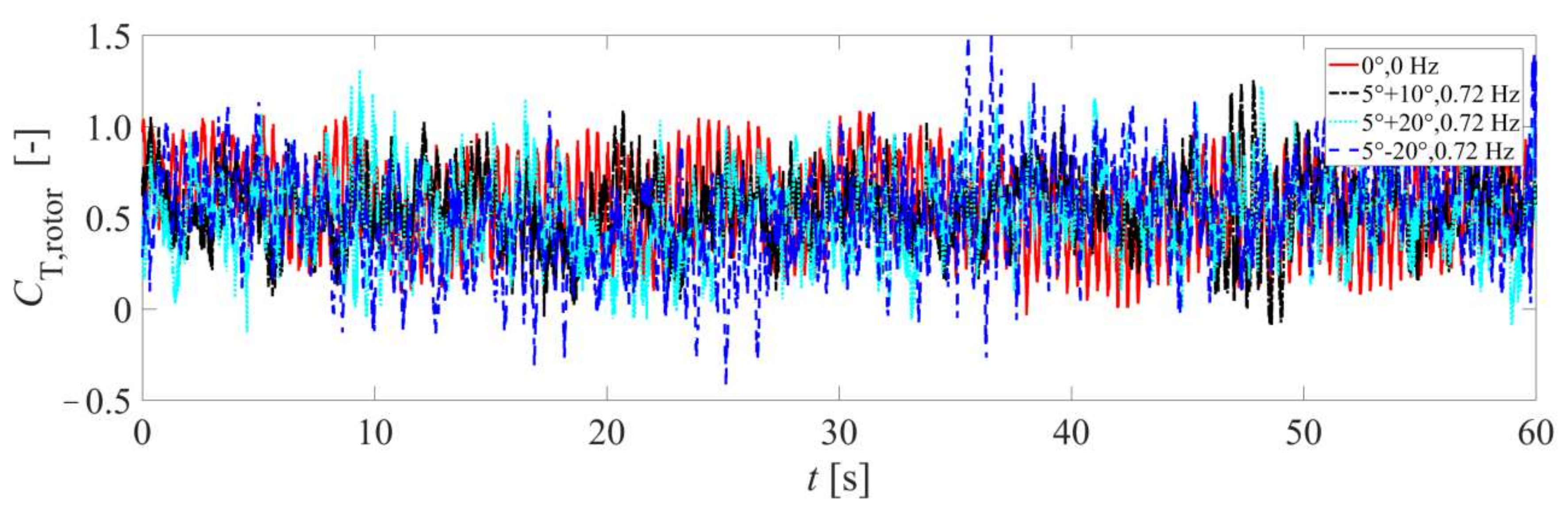
For the coupled yawed inflow conditions, although the thrust coefficient decreases with the increment of static yawed angle of the coupled inflow condition, it fluctuates more violently. The normal forces present similar trends but are not as significant as the thrust coefficient. Both the thrust coefficient and the normal force under the negative static yawed angle are larger, and they fluctuate more violently than those under the corresponding positive one.
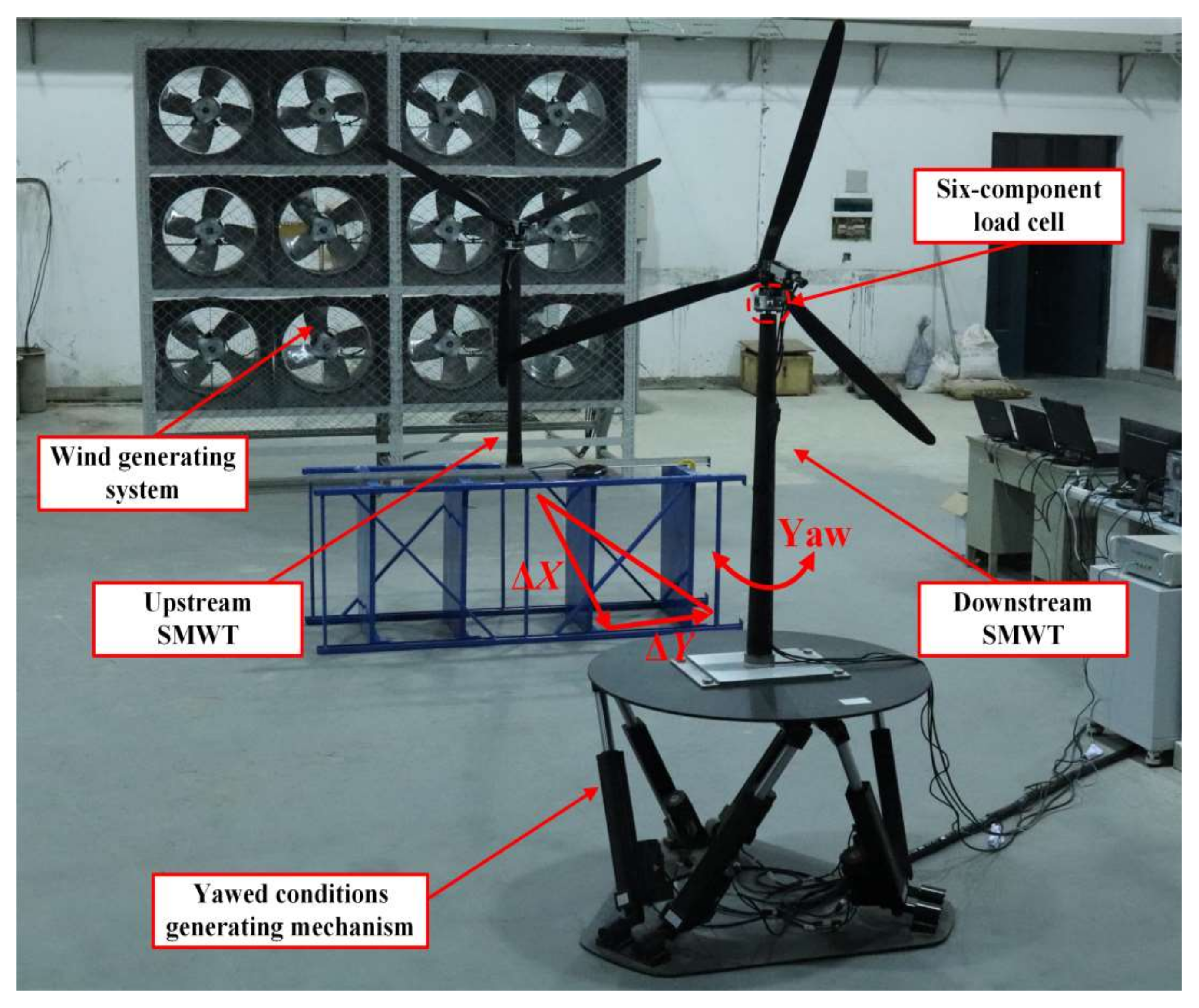
Experimental tests are conducted on a set of dedicated apparatus. According to the analysis of the experimental data of thrust coefficient and comparisons with the simulation results, it can be roughly validated that the analyses of thrust characteristics of a downstream OFWT under the dynamic, static, and coupled yawed inflow conditions from the simulations are correct. More experimental studies will be done to further verify the accuracy of the simulation results in our future work.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}