1. Introduction
There are abundant marine resources on the Earth [
1,
2]. With the development of underwater technology, autonomous underwater vehicles [
3], gliders [
4,
5], and buoys [
6] have been developed for ocean observation. Energy is a crucial matter in the design process of underwater vehicles. Most underwater vehicles use lithium batteries, which have a high energy density, as an energy source [
7,
8]. More importantly, some underwater vehicles, such as underwater gliders, use lithium batteries as weights for attitude adjustments [
9] to utilise the weight and space of the battery.
In general, underwater gliders and buoys are equipped with a buoyancy regulation system. Some buoyancy regulation systems increase their weight by pumping seawater into the body [
10], and some increase their volume by pumping oil from an inner cylinder to an external bladder [
11]. The two methods have one thing in common—both require a motor to drive the pump, and the energy required for this motor accounts for most of the overall energy consumption. Yazji et al. adjusted the volume of the vehicle by utilising electrolysis and reverse electrolysis of polymer electrolyte membrane fuel cell [
12]. Um et al. changed the overall volume of the buoyancy regulation system by electrolysing water and then inflating an artificial bladder with the generated gas to increase buoyancy [
13]. Although this method of changing the volume of gas is effective in a diving environment, depth control is difficult once the vehicle reaches the deep-water area because of the greater compressibility of the air. Therefore, the method of changing the volume by using hydraulic oil has been widely used.
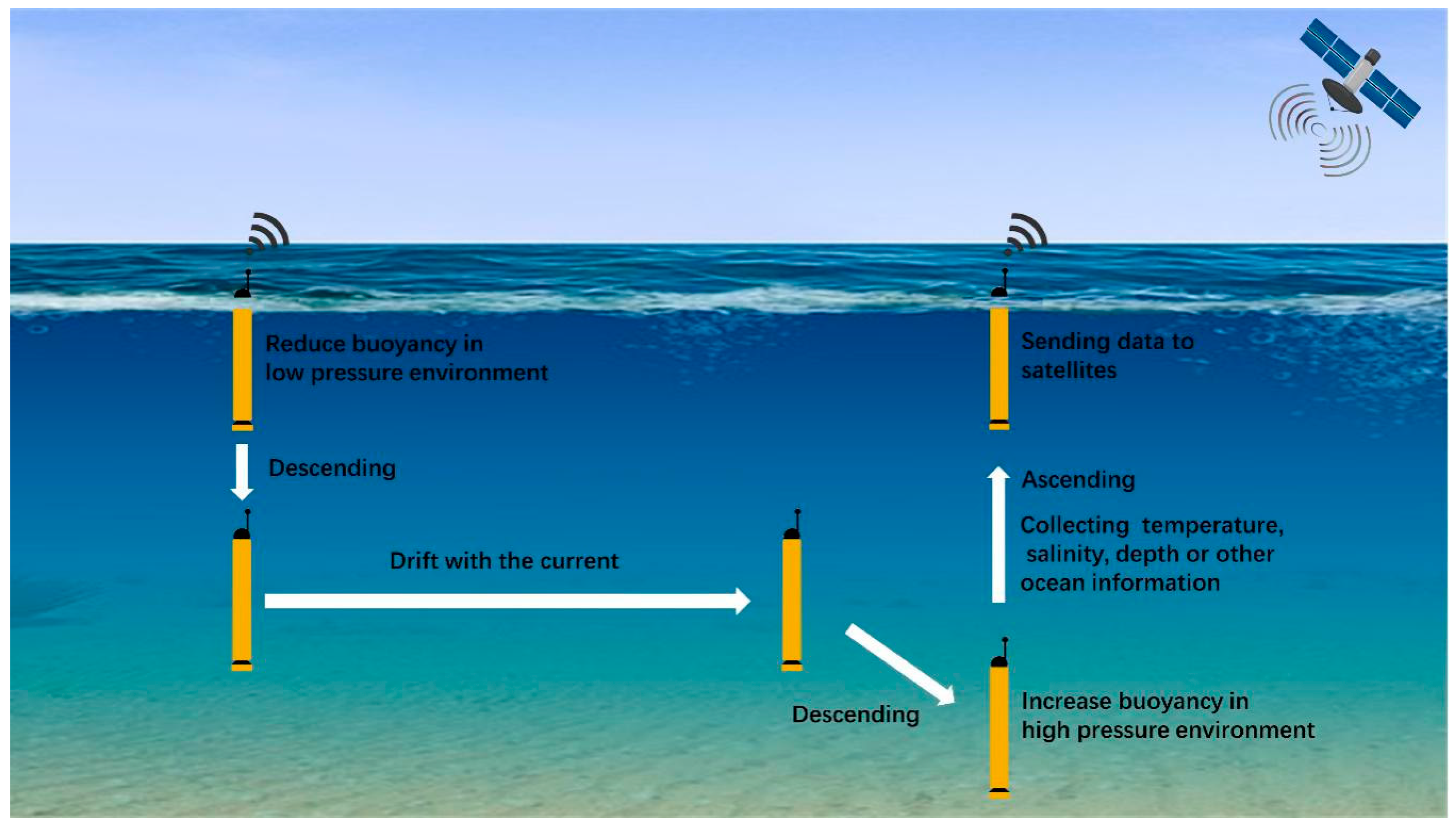
Figure 1 shows the typical working process of an underwater profiler. When the profiler prepares to descend, it pumps the oil from its outer oil bladder into its inner cylinder. When the profiler prepares to ascend, the reverse process is performed to increase the buoyancy. Generally, this process is performed all at once. As the depth increases, the power consumption of the motor of the buoyancy regulation system becomes larger [
14]. Some researchers have explored buoyancy regulation strategies to save the energy of the profiler during the working process. Petzrick et al. [
15] proposed pumping oil in small increments and maintaining the total ascent time within 20 h. Mu et al. [
16] proposed an overall energy model for the floating process based on the multiple quantitative regulation strategy; through numerical calculation, they concluded that the system power consumption is the lowest when the buoyancy regulation system of a 4000-m-level submersible is adjusted 16 times during the floating process. Liu et al. [
17] proposed a ‘stage quantitative oil draining control mode’, and the system parameters, including oil discharge resolution, judgement threshold of the floating speed, and frequency of oil draining, were optimised. These strategies and methods are instructive. It is necessary to establish accurate kinematic models and select appropriate judgement thresholds, especially considering the interference of ocean currents. In addition, it is meaningful to explore the contradictory relationship between energy and time during ascent for the development of appropriate mission assignments.
In this article, we propose a buoyancy regulation strategy with depth as the judgement threshold. Our strategy is based on the adaptive genetic algorithm (AGA) which is validated using a hybrid underwater profiler (HUP) [
18] named Zhejiang University HUP (ZJU–HUP) in Qiandao Lake, China. The remainder of this article is organised as follows.
Section 2 presents the principle of a buoyancy regulation system and the ascending kinematic model.
Section 3 presents the operation process of the AGA.
Section 4 presents the results of numerical simulations within a depth of 0–500 m using sea trial data obtained in July 2017. Finally,
Section 5 presents the lake trial and the corresponding results.
3. Buoyancy Regulation Strategy
Based on the kinematics model established in
Section 2, the optimal depth at which the oil is pumped needs to be solved. Since the kinematics model is nonlinear, it is difficult to use conventional methods. Currently, intelligent optimisation algorithms are widely used. Among them, the AGA is an intelligent optimisation method in which the probability of crossover and mutation changes with the value of the objective function; AGA can effectively prevent the search process from converging to the local optimum value. The AGA was applied to a variety of problems such as job-shop problems [
19], optical metasurface design [
20], and sensor acquisition frequency adjustment [
21], and satisfactory optimisation results were obtained. To optimise the depth accurately and to prevent convergence to the local optimal value, the AGA was applied to the buoyancy regulation strategy.
3.1. Optimisation Principle and Process
In the AGA, the roulette method is used to select better individuals to prevent the loss of individuals with excellent genes. Gene recombination and mutation are important means of biological evolution. Similarly, two-parent individuals exchange partial structures to generate new individuals to improve the global search ability of the AGA. The individuals in the population can be mutated by changing the value at a certain gene position. Mutation may have two effects: one is to improve the local search ability of the AGA, and another is to maintain population diversity.
In the population of a certain generation, different individuals have different fitness values. A high fitness value indicates a better individual, and such an individual should be retained. So this individual should have a small crossover probability and mutation probability. Generally, the difference between the maximum fitness value and the average fitness value in a generation is defined as
for convenience. This value indicates the degree of convergence of the population. When the algorithm gradually converges, it may jump into the local optimal solution as
decreases gradually. In this situation, the crossover probability and the mutation probability should be increased to enable the system to jump out of the local optimal solution. On the other hand, in the population of a certain generation, excellent individuals should have small crossover probability and mutation probability, and poor individuals should have large crossover probability and mutation probability to accelerate the elimination process. Therefore, the crossover probability
and mutation probability
[
22] are expressed as follows:
where
represents the average fitness value of the population;
is the maximum fitness value of the population;
and
are the fitness value;
,
,
,
.
3.2. Construction of the Fitness Function
The fitness function is used to describe the adaptability of each individual in the environment, and it determines whether an individual can be retained. Individuals with high fitness values are more likely to be inherited to the next generation. For the buoyancy regulation strategy described herein, the minimum value of the fitness function should be calculated. This function has two parts, namely, energy and time. It can be expressed as follows:
where
is a positive number used to make the fitness function positive.
is the weight of energy and varies from 0 to 1. It represents the proportion of motor energy consumed of the buoyancy regulation device.
is the weight of time representing the overall time of the floating movement. The sum of
and
is 1. Furthermore,
is the frequency of oil drainage.
is the power consumption of the motor when pumping oil at depth
, and
is the corresponding time. The floating time between two adjacent depth values is represented by
, and it can be obtained by multiplying the number of subintervals by the step size.
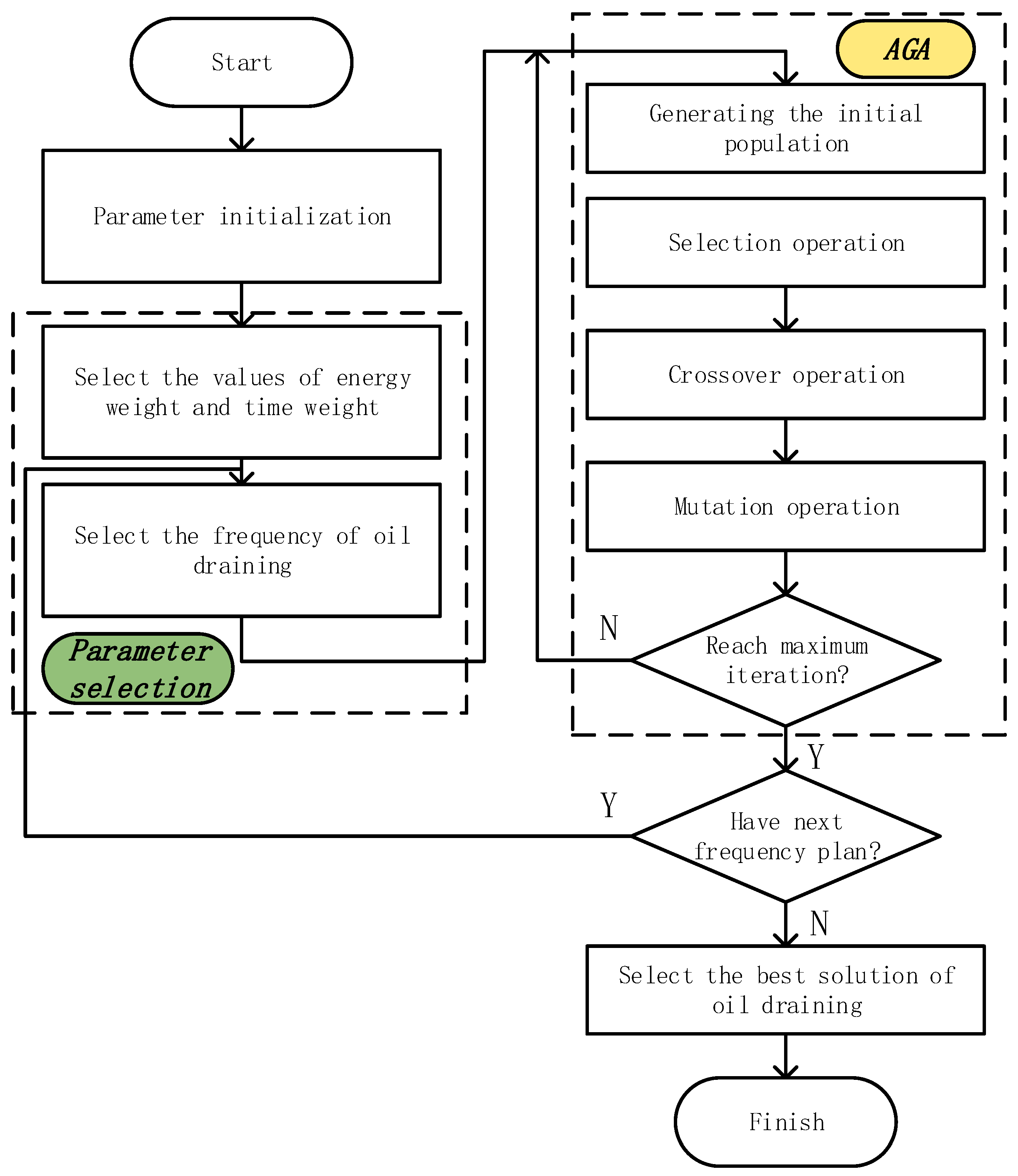
3.3. Adaptive Genetic Algorithm Process
The application of the AGA for the buoyancy regulation strategy involves the following steps and the corresponding flowchart is shown in
Figure 5.
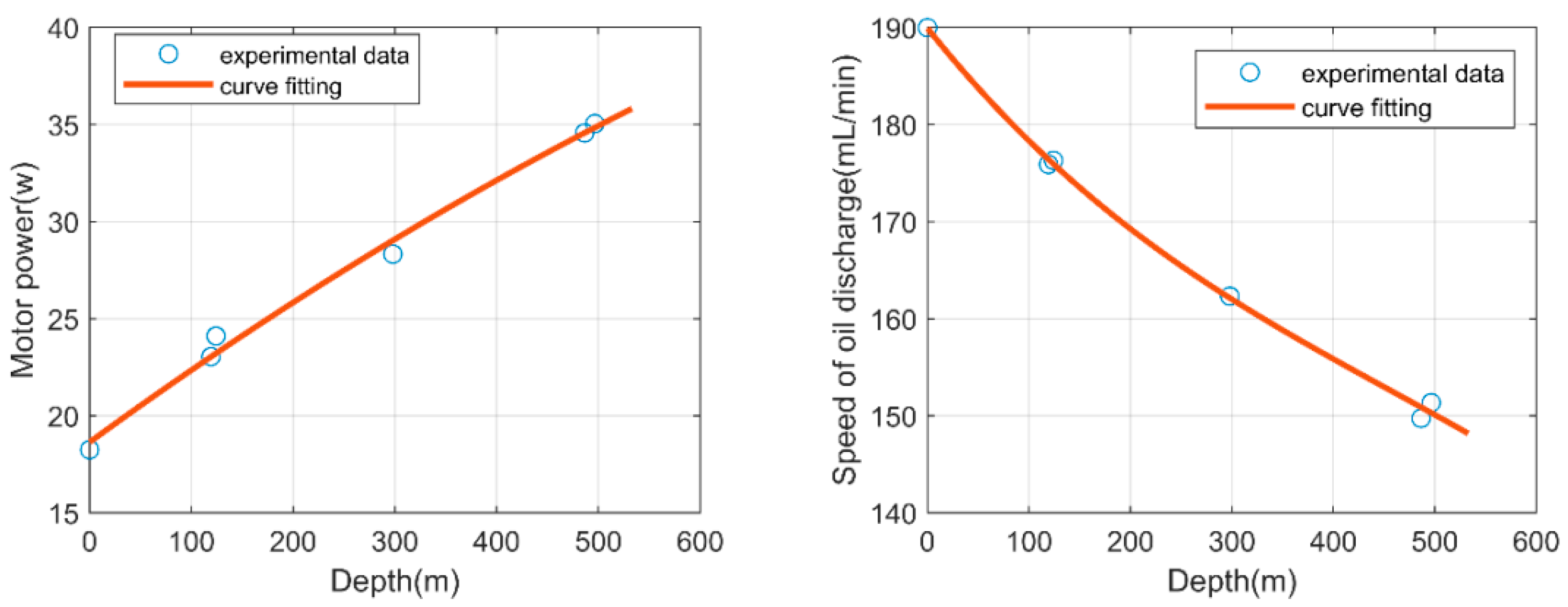
Step 1: Parameter initialisation. First, perform experiments on the buoyancy regulation system to obtain the relationship between the motor power and depth and the relationship between the oil draining rate and depth of the pump. Then, collect the temperature, salinity, and depth information when the profiler moves from the sea surface to the target depth to fit the relationship between the density and depth according to the EOS-80 equation [
23].
Step 2: Select the values of power, weight and time weight. Based on the task requirements, if the requirements for low energy consumption are stringent and the time to perform the detection task is relatively sufficient, then a larger is selected; if less time is available to perform the detection task, a larger , that is, a smaller is selected.
Step 3: Select the oil draining frequency. Different frequency values should be set in the AGA to compare energy and time at different oil draining frequencies.
Step 4: Generate the initial population. In the AGA, randomly generated depth is used as individuals. For frequency , generate individuals randomly, that is, depth values, to generate a population consisting of depth values. The reason for setting the number of individuals in the population as 1 less than the frequency of oil draining is that the first depth value is fixed.
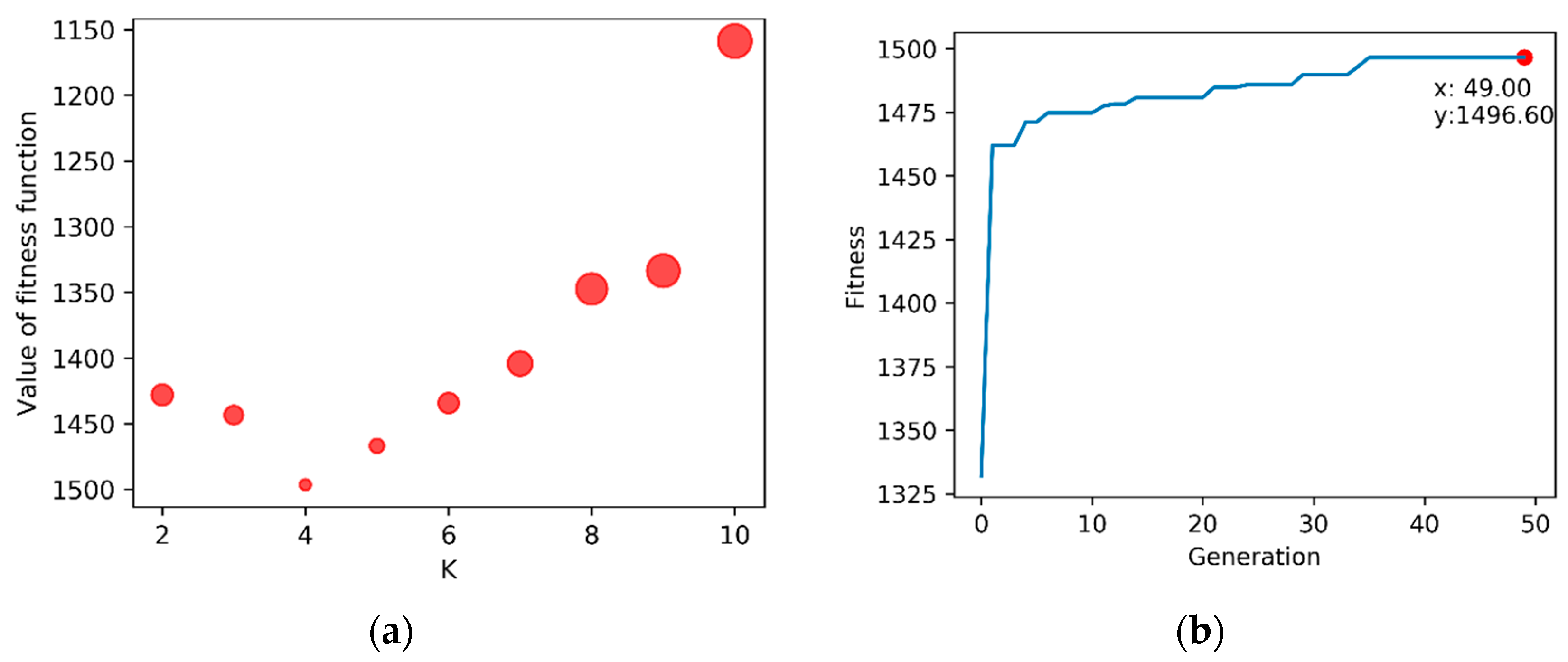
Step 5: Execute the AGA. A new population is obtained through three operations: selection operation, crossover operation, and mutation operation. The number of population is set to 10, and the number of generation is set to 50. The value of and is 1. The value of and is 0.1.
Step 6: Determine whether the maximum number of iterations is reached. The number of iterations should be sufficiently large to allow results to converge.
Step 7: When a plan is completed, record the optimal energy and time. Change the frequency of oil draining until all the steps are executed. Finally, the frequency of oil draining corresponding to the smallest fitness value can be used as the execution solution.
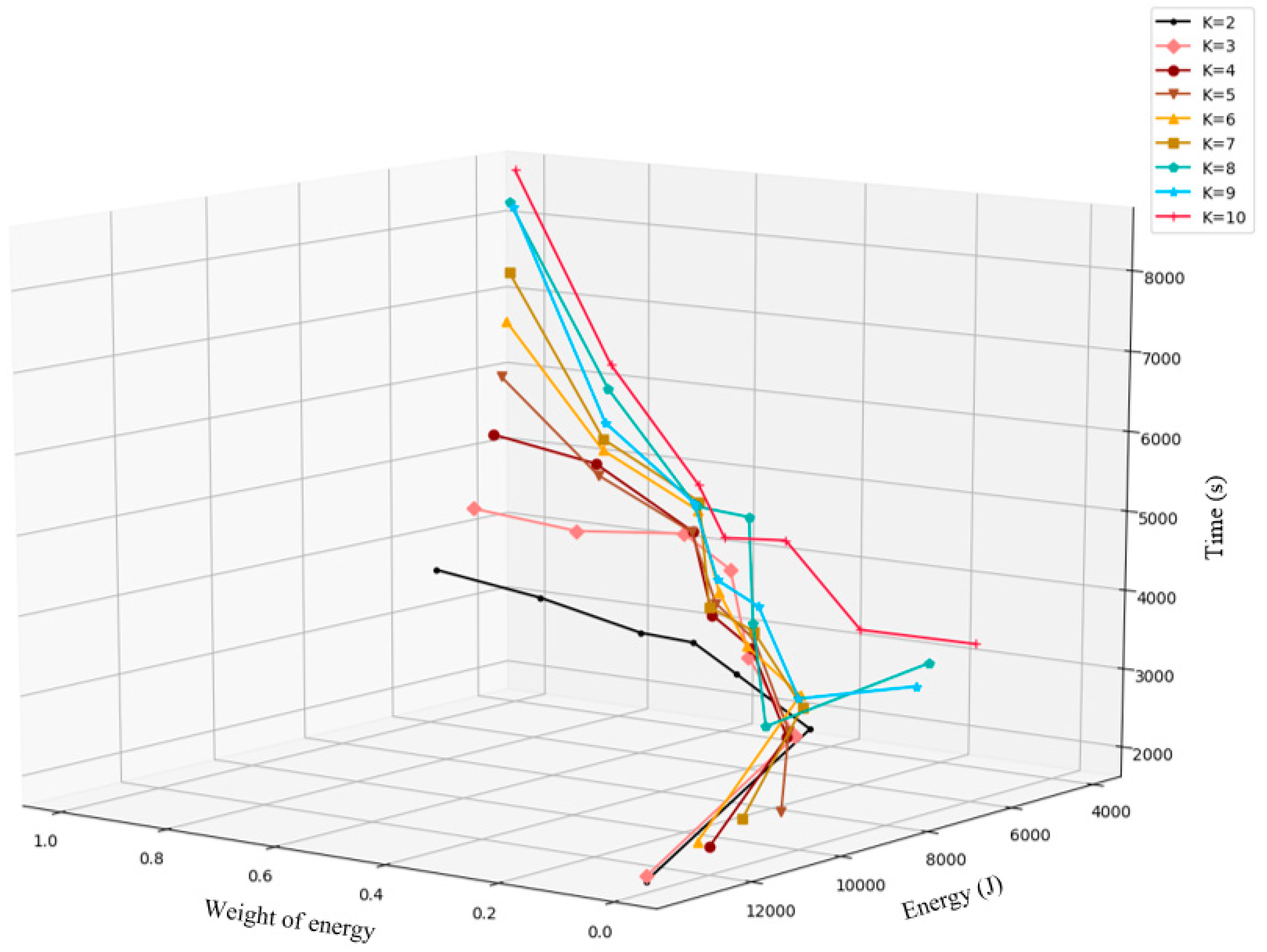
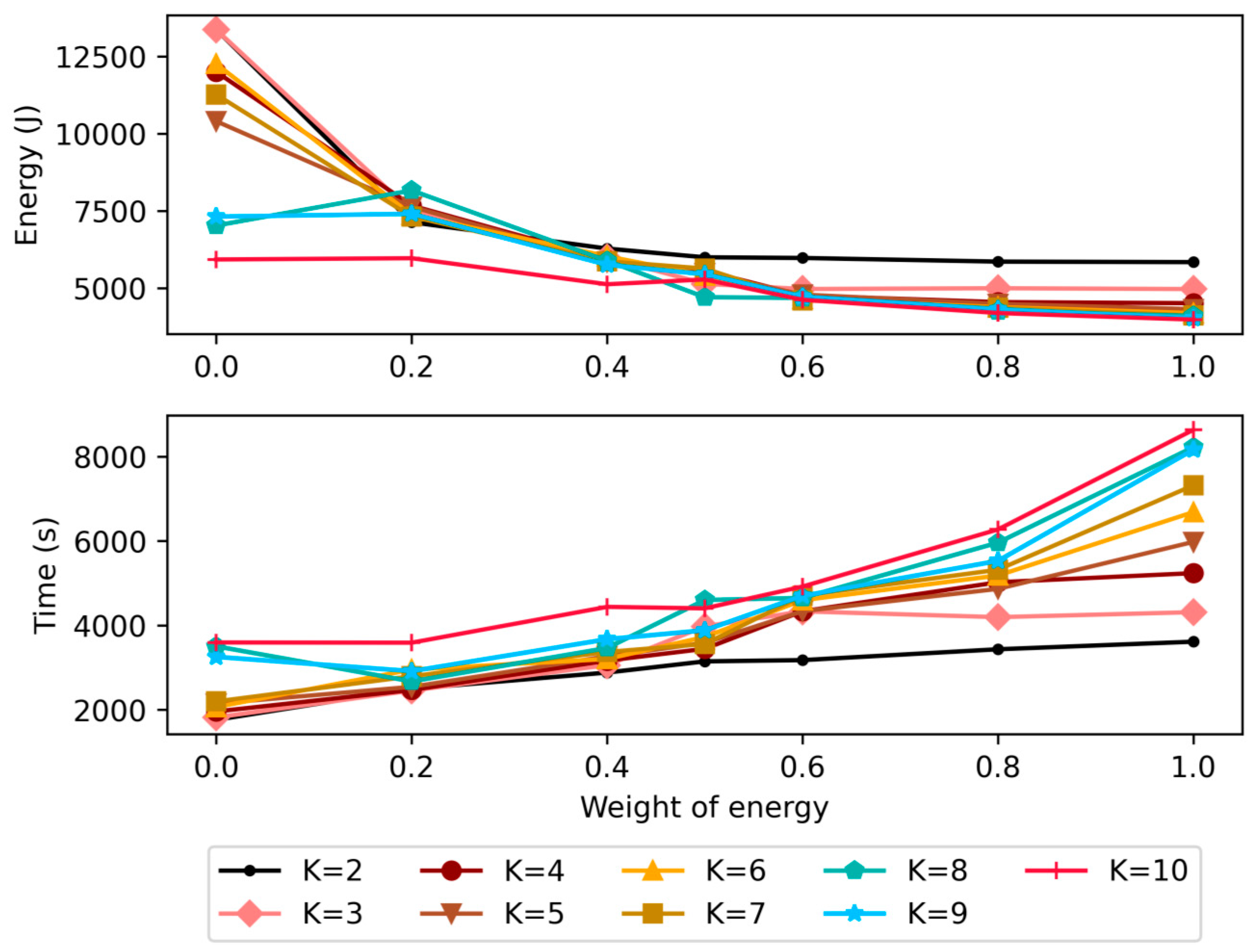
5. Lake Trial Results and Discussion
The above discussion shows that an inverse relation exists between energy and time. If a larger weight is assigned to energy, the energy consumption of the device will be reduced. However, the time spent in ascending will increase. Similarly, if time is assigned a larger weight, the ascent will be faster. A field experiment was conducted in Qiandao Lake in September 2020 for verifying the buoyancy regulation strategy (see
Figure 10).
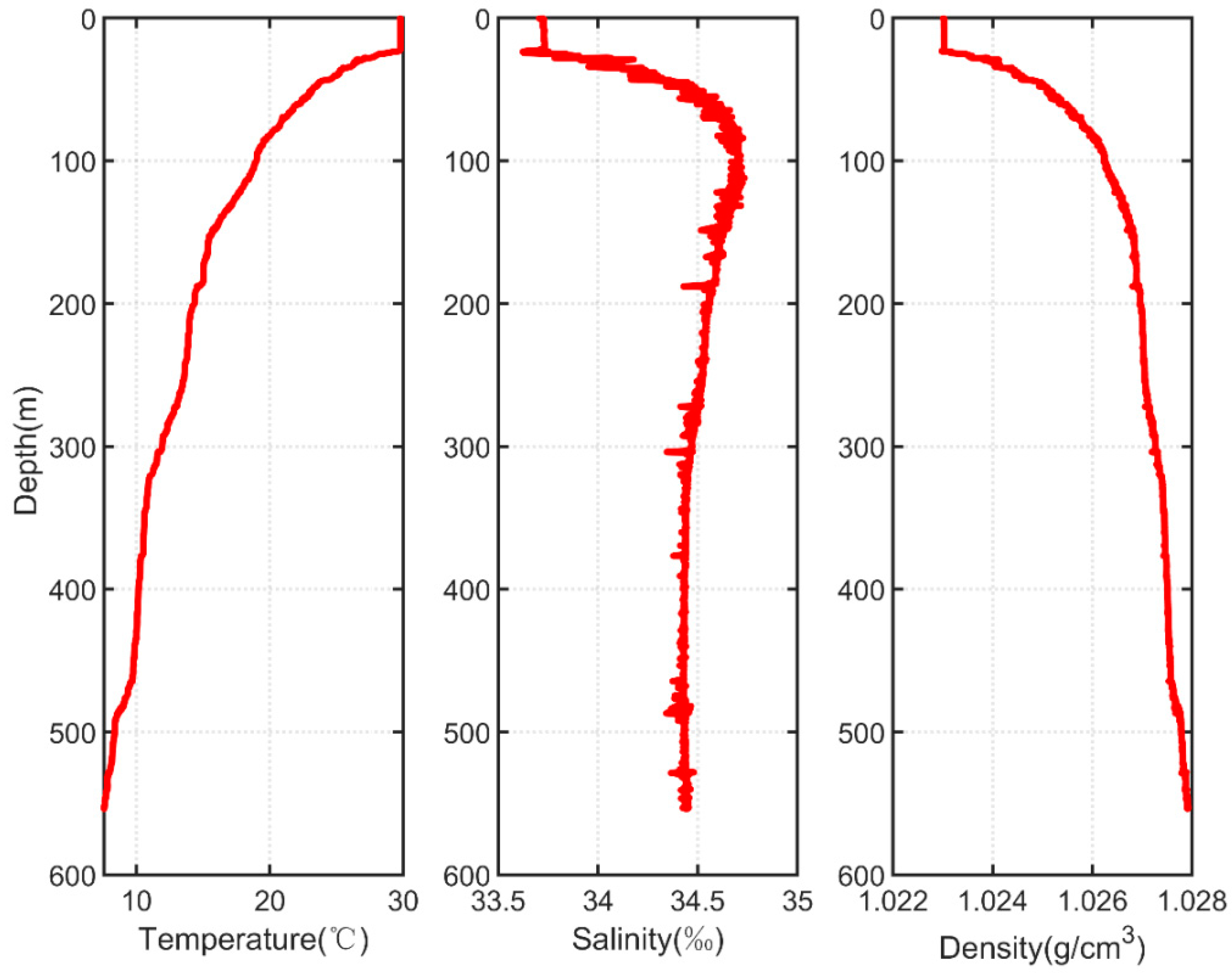
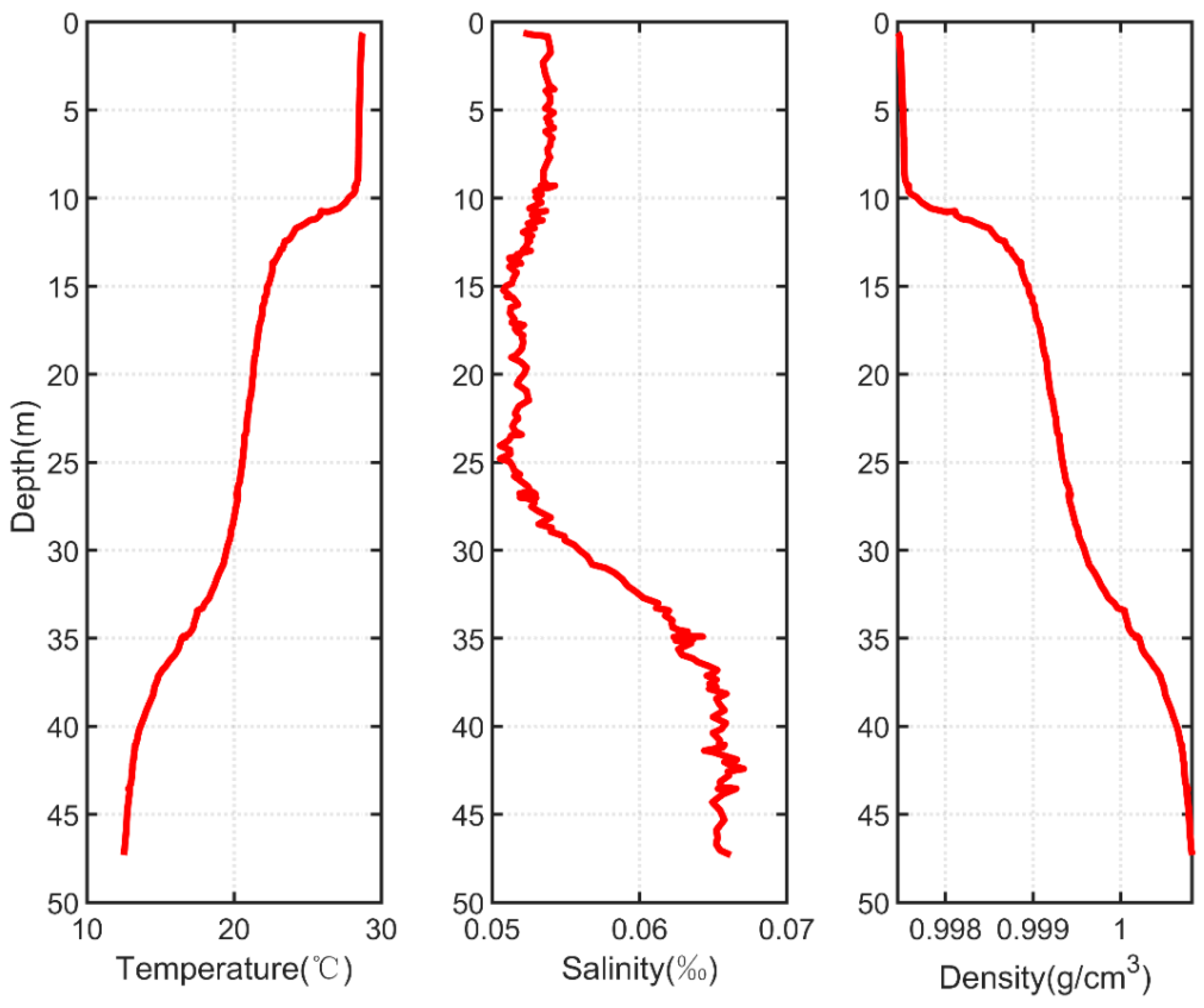
The depth of the site of the trial is 47.6 m. The depth profiles of temperature and salinity are shown in
Figure 11. The temperature at the water surface was 28.8 °C, and that at a depth of 47.6 m was 12.5 °C. Salinity did not change significantly with depth as Qiandao Lake is a freshwater lake.
The main control chip of the ZJU-HUP is MSP430. It is responsible for the execution of the related actions, for example, turning on the motor and sending GPS (global positioning system) information. The sensor management board collects information from various sensors. A circuit board based on Arduino was added to the ZJU-HUP in this experiment. This circuit board can receive sensor data from the master chip and store it into an SD (secure digital) card. It is also connected to two Hall elements that measure the current of the buoyancy regulation system.
The buoyancy regulation strategy, after AGA optimisation, is described in
Table 2. The strategy needs to account for an initial optimised depth of 40 m and a final optimised depth of 5 m. If the oil is pumped to the external bladder once, the HUP turns on the motor of the buoyancy regulation system at a depth of 40 m to ascend to a depth of 5 m all at once. If the oil is pumped to the external bladder twice, the HUP partially pumps oil out first at a depth of 40 m to reach the next depth of 9 m, and then at 9 m, it pumps the rest of the oil. If the oil is pumped to the external bladder three times, the HUP pumps oil at three depths (40, 12, and 7 m).
The cable displacement sensor is a device that can output the position of the piston in a cylinder. Using this sensor, the amount of oil in the external bladder can be determined by setting the position of the piston. The cable displacement sensor output voltage signal and the target voltage value can be calculated according to the amount of oil required. The piston positions at different stages during the overall process are listed in
Table 3.
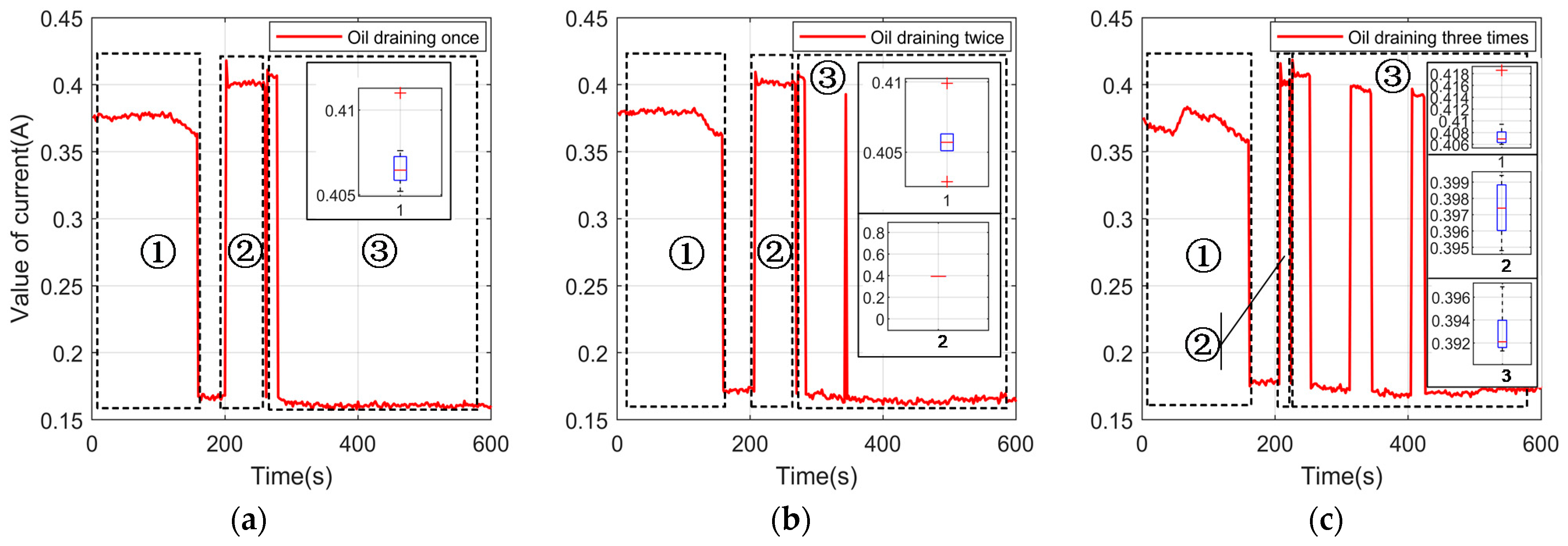
The value of the motor current during the trial is shown in
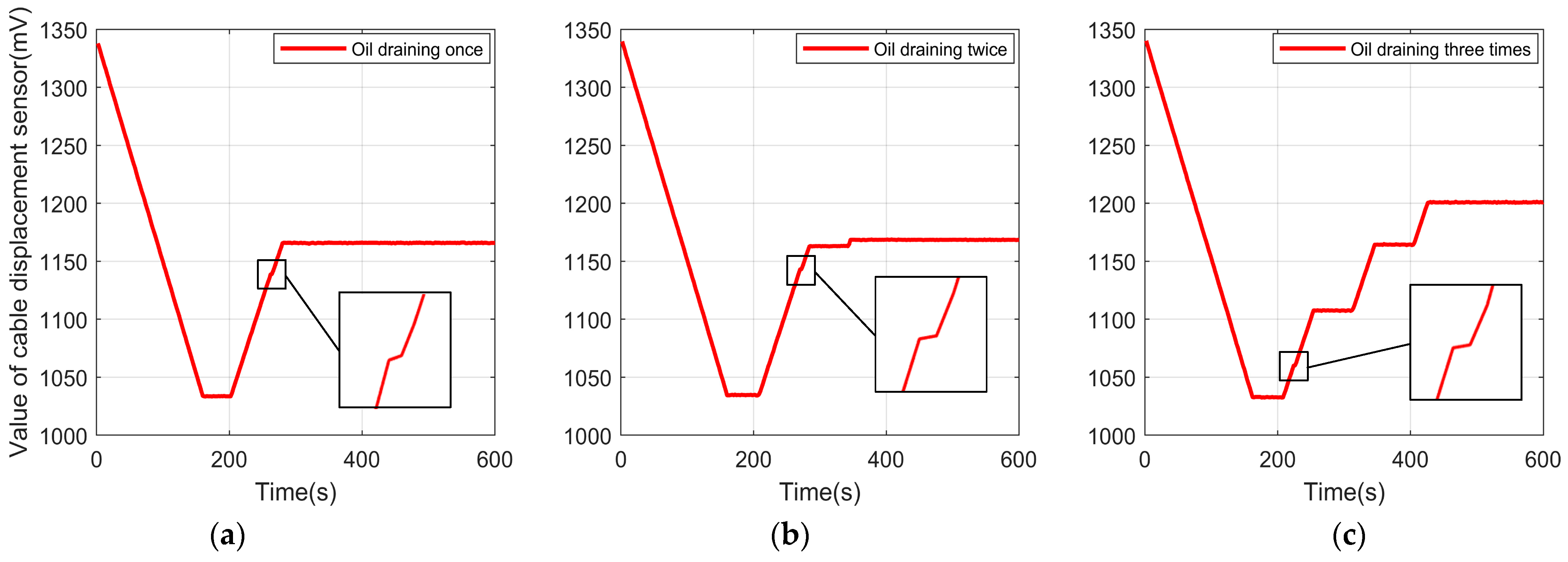
Figure 12. The entire process is divided into three periods. The value of the cable displacement sensor is shown in
Figure 13; the insets in the figure show a magnified view of the starting positions for the buoyancy regulation strategy. When the buoyancy regulation system starts pumping oil from the external bladder (①), the HUP begins to descend while simultaneously recording temperature, pressure, time, and current data. When a depth of 38 m is reached, the HUP starts pumping oil into the external bladder to increase the overall volume (②), so that it slows down gradually and then begins to ascend. The depth at which the HUP begins to pump oil out is calculated based on the kinematics and dynamics; calculations show that the maximum depth that the HUP can reach is 42 m. When the HUP returns to a distance of 2 m from the greatest depth, it first stops for 1 s and then starts to implement the buoyancy regulation strategy (③).
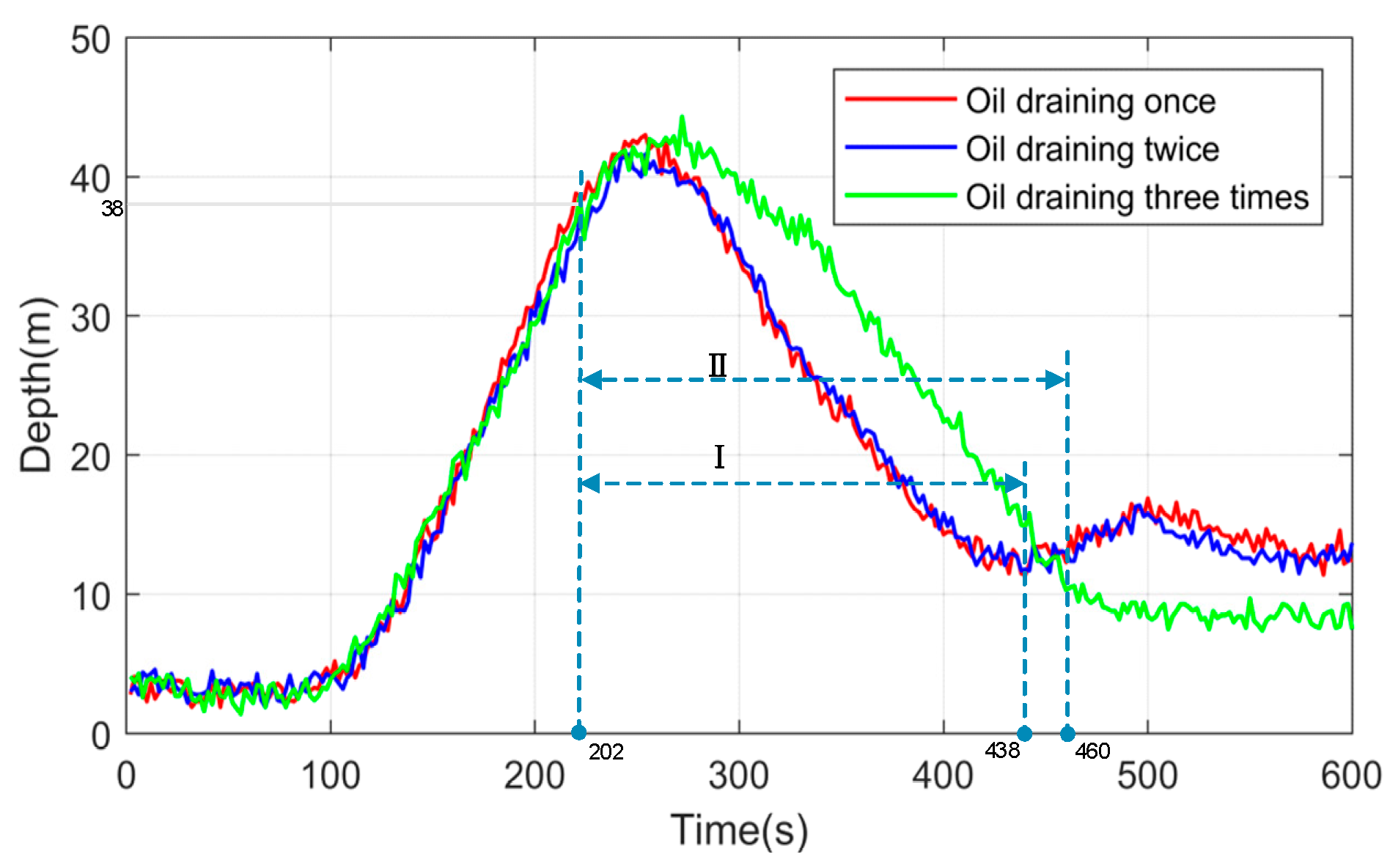
Two phenomena were noted in the experiment. First, during the experiment in which the oil was drained thrice, the output data of the pressure sensor underwent a fluctuation greater than 2 m, which caused the buoyancy regulation strategy to start earlier during the descent. However, this phenomenon did not affect the time and energy calculations. Next, the depths optimised by the AGA are listed in
Table 2. However, owing to the complex underwater terrain of Qiandao Lake, security time protection is necessary between two consecutive depths and the protection was triggered because the ascent time between the two depths exceeded 1 min. So the buoyancy regulation strategy was not executed at the set depth. Therefore, this experiment is a preliminary verification of the buoyancy regulation strategy, but the contradictory relationship between energy and time can be obtained. Then, when the HUP is launched to perform tasks, overall time protection is necessary. If the operation time of HUP exceeds the predetermined time, the external bladder will be filled with oil, and then, the HUP will start ascending. Therefore, while the HUP was pumping oil out during the three oil-draining steps, overall time protection was triggered, and as a result, the final oil volume in the third experiment was more than that in each of the first two experiments, and the final depth achieved by the HUP float was smaller. However, according to the buoyancy regulation strategy, the minimum depth at which the HUP can reach is fixed. Therefore, according to the minimum depth the HUP reached in the first two experiments, the time when the buoyancy regulation strategy of the third experiment ends can be inferred. Thus, the range of the buoyancy regulation strategy of the three experiments can be obtained. Since the changes in the depth in the first two experiments are similar, the overall process of the buoyancy regulation strategy is both represented as Interval I. The process of the third experiment is represented as Interval II.
The optimisation results listed in
Table 3 show that the target position of the first oil pumping is close to that of the second oil pumping. This makes the depth change of the oil draining twice similar to that of the oil draining once. From
Figure 14, we can see that the time spent is 236 s in interval I and 258 s in interval II. The third experiment requires 9.32% more time than the first two experiments.
To analyse the current data more comprehensively, box diagrams were plotted based on the current value. The power of the motor changed when pumping oil at different depths, and as the depth increased, the energy consumed of the motor increased too. By calculating the energy for interval I and interval II, we can draw the conclusion that the energy consumed of oil draining twice is 0.26% less than that of oil draining once and the energy consumed of oil draining three times is 2.72% less than that of oil draining once.
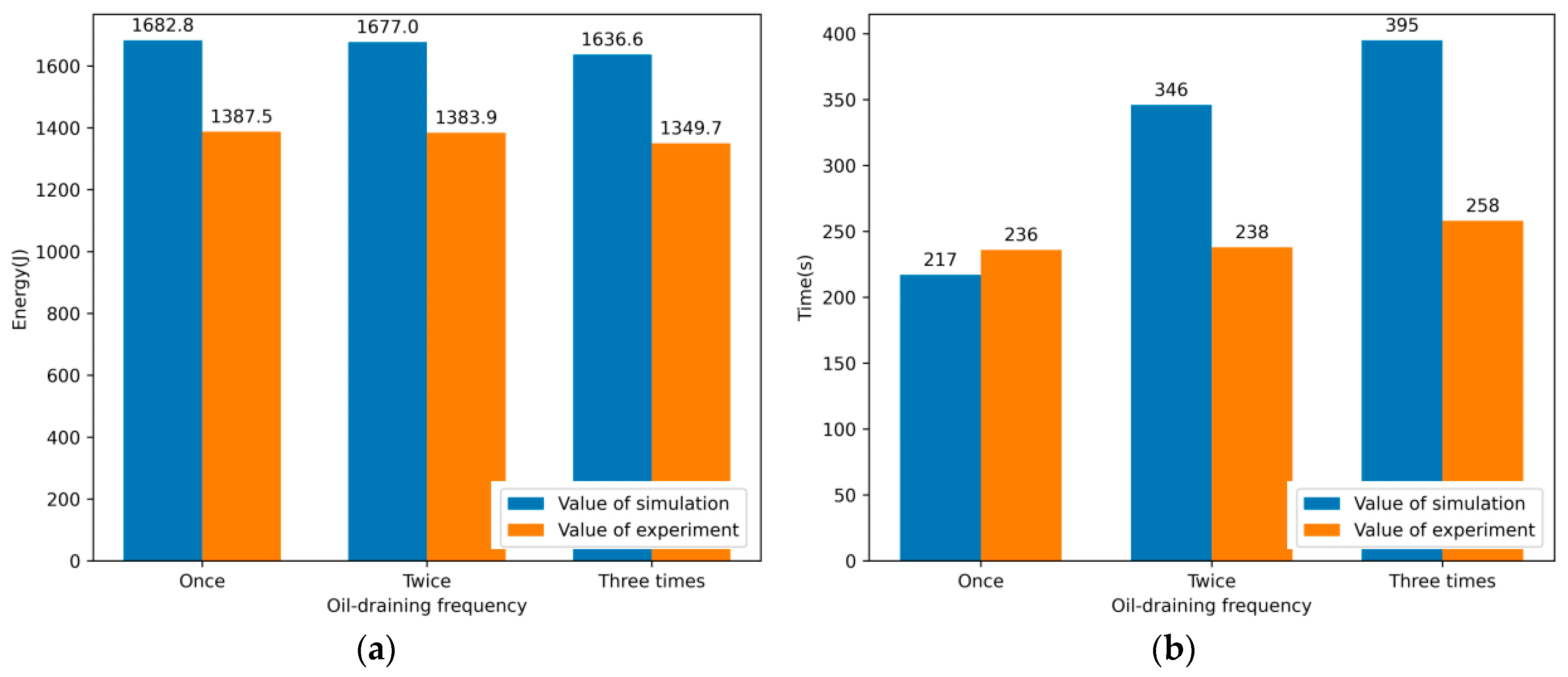
The simulation results are compared with the experimental results, as shown in
Figure 15. It can be observed that the simulation results are close to the experiment results, but there are also differences. For the energy in
Figure 15a, the value of simulation is greater than the value of the experiment. This may be due to the inconsistency between pressure and depth caused by the system error of the pressure sensor. For the time in
Figure 15b, the error between the simulation value and the experiment value may be caused by the experimental setup. Because there is no depth control in the experiment, the ZJU-HUP does not start to move from the depth of 40 m, but more than 40 m. This will make the speed greater than 0 at the depth of 40 m, which will lead to a reduction in the floating time.
6. Conclusions
In this paper, a buoyancy regulation strategy for underwater profilers is proposed. In this strategy, oil is pumped out several times instead of all at once. First, the relationship between the volume of the external bladder and the density difference was established, and that between the motor power and the depth was experimentally obtained. Then, a floating kinematics model of the profiler was established, and the depth of oil draining was optimised based on the AGA. Next, the buoyancy regulation strategy was numerically simulated using sea trial data for depths of 0–500 m. The fitness function was the smallest when the oil is pumped out four times under the condition that the weights assigned to power and time were both 0.5. Finally, the trial was performed at depths of 0–40 m in Qiandao Lake. During the ascent, the ascent time of oil draining thrice was 9.32% more than the ascent time of oil draining once, but the corresponding energy consumed was less by 2.72%. As the depth of the water area in this experiment is relatively shallow, the reduction of energy and the increase in time are not obvious. In addition, an appropriate depth control method should be studied and applied. Therefore, in subsequent research, we will verify the buoyancy regulation strategy with depth control in the sea trial to observe more significant numerical changes.

 ,
, 
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}