An Object Model for Seafloor Observatory Sensor Control in the East China Sea

Abstract
1. Introduction
2. Object Model Design
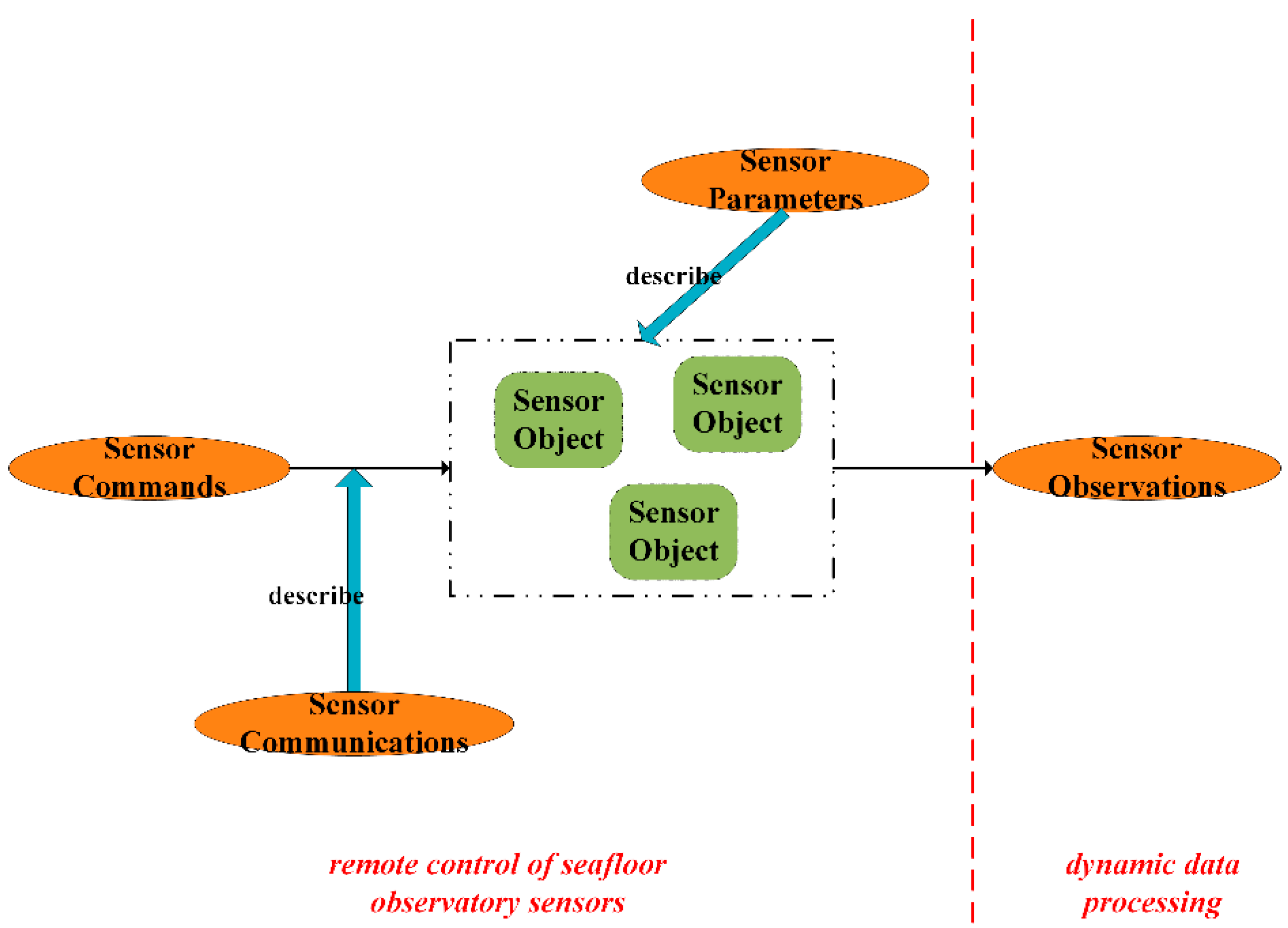
2.1. Sensor Information Description
2.2. Object Model of Seafloor Observatory Sensors
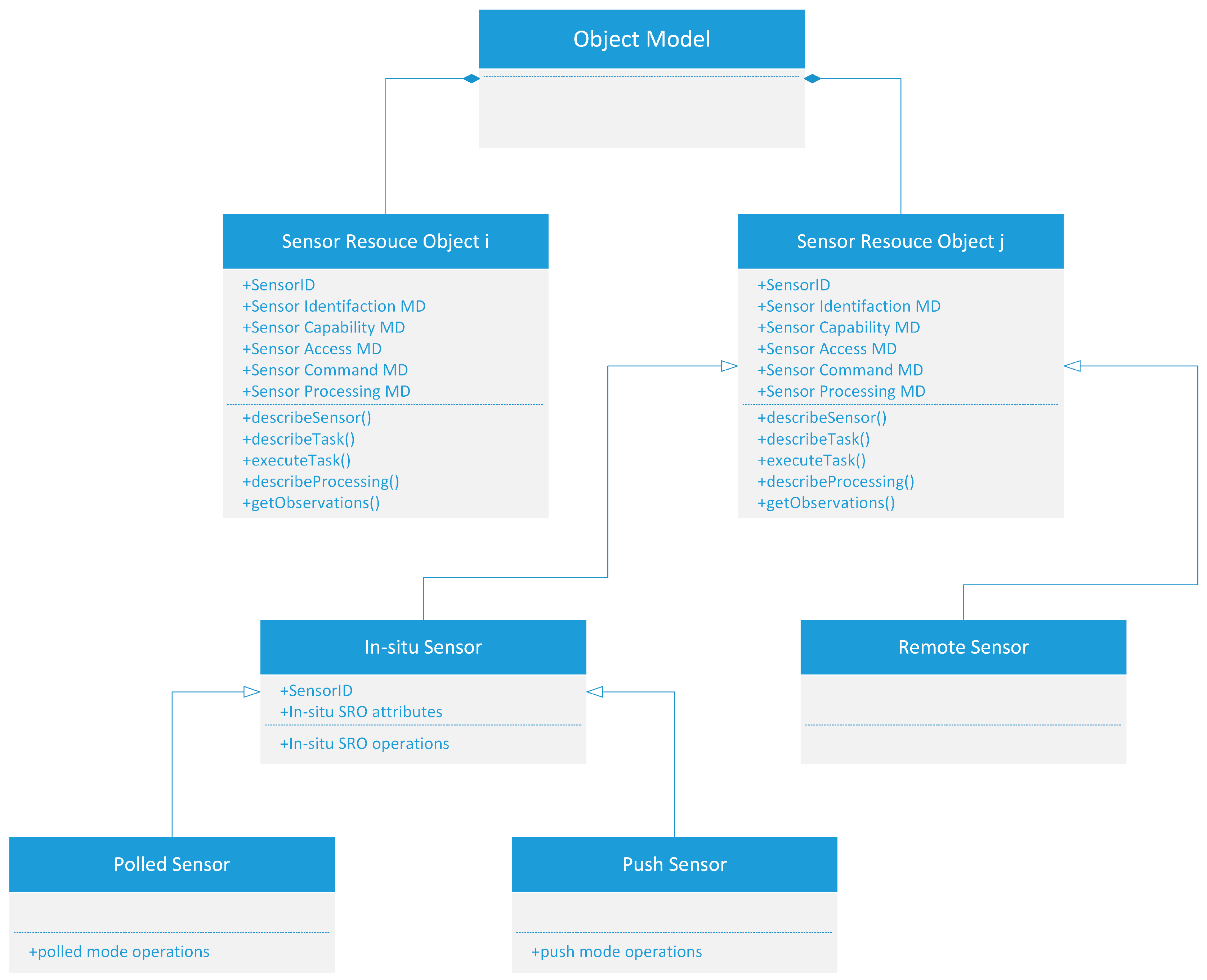
2.2.1. Sensor Resource Object
2.2.2. Attributes of the In Situ Sensor Resource Object
2.2.3. Operations of the In Situ Sensor Resource Object
- describeSensor(): The MDi served as input parameters for this operation includes the MDI and the MDCP. This operation outputs the information of SROis identification and observation capabilities, which specifies the sensor measurement.
- describeTask(): The MDi input of this operation is the MDA and the MDCM. The output of this operation is the SROis interface information, describing the way to access and control the in situ observatory sensor.
- executeTask(): This is the core operation for sensor control and data acquisition. With the communication and command configuration respectively from the MDA and MDCM input, this operation makes the observatory sensor measure the environment in accordance with observation demands.
- describeProcessing(): The MDi served as input parameters for this operation refers to the MDP. The output of this operation is mainly the processing documentation, explaining how to interpret and analyze the raw observation data.
- getObservations(): The MDi input of this operation is the MDP, based on the attributes of which the operation returns either the datafile information for raw data or the database information for interpreted data and data products.
3. Seafloor Observatory Sensor Control Experiment
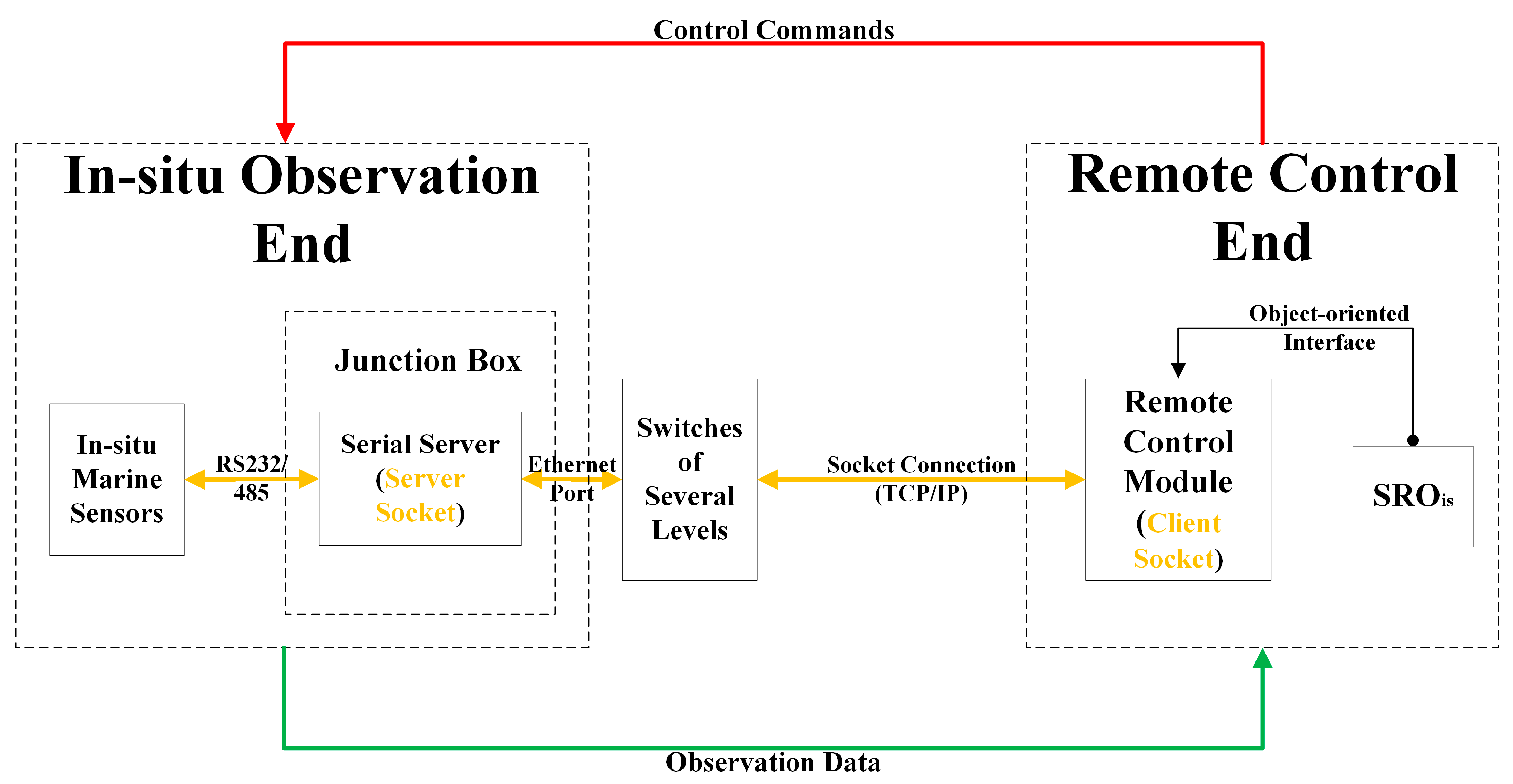
3.1. Model-Based Sensor Control Architecture
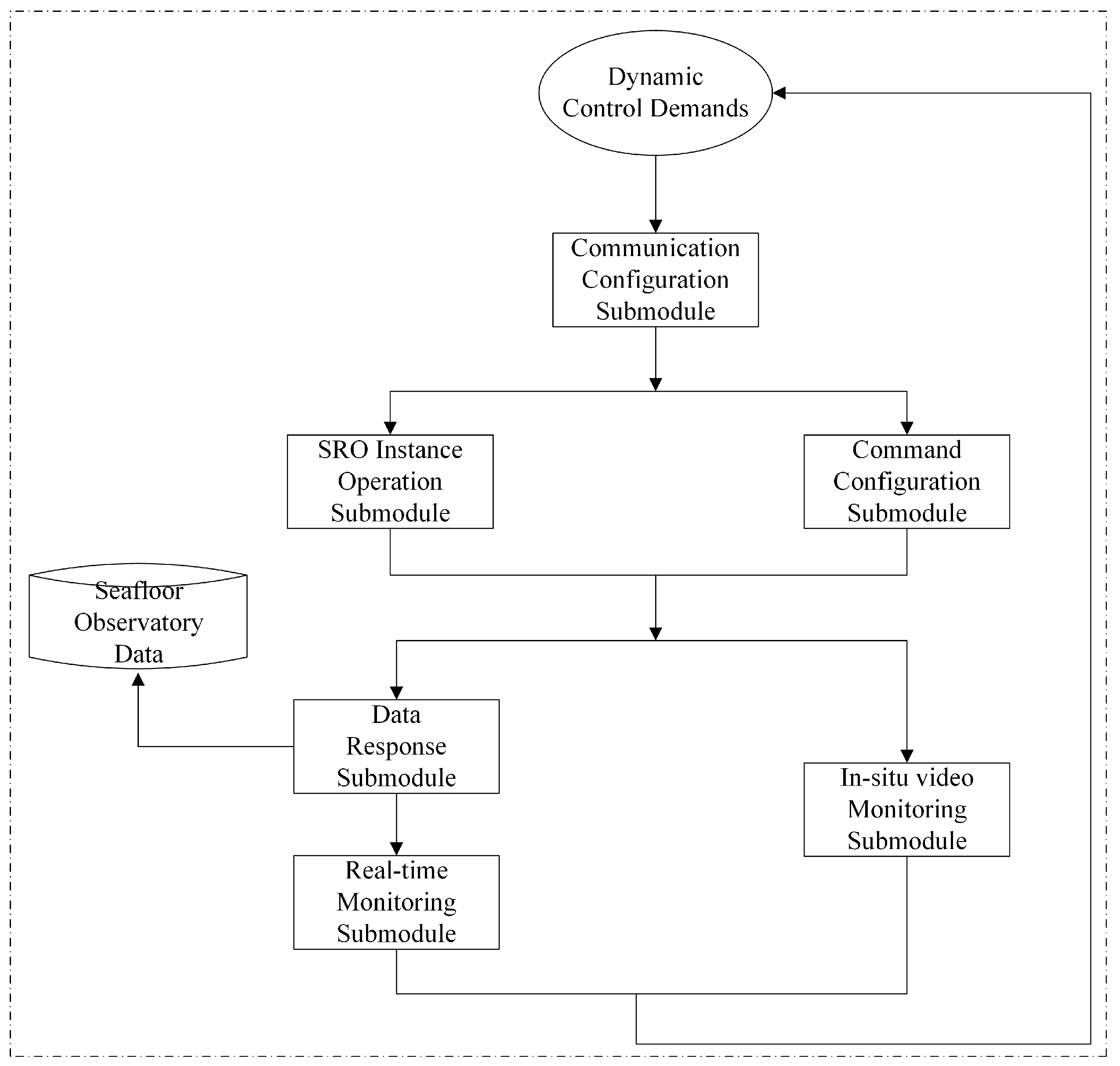
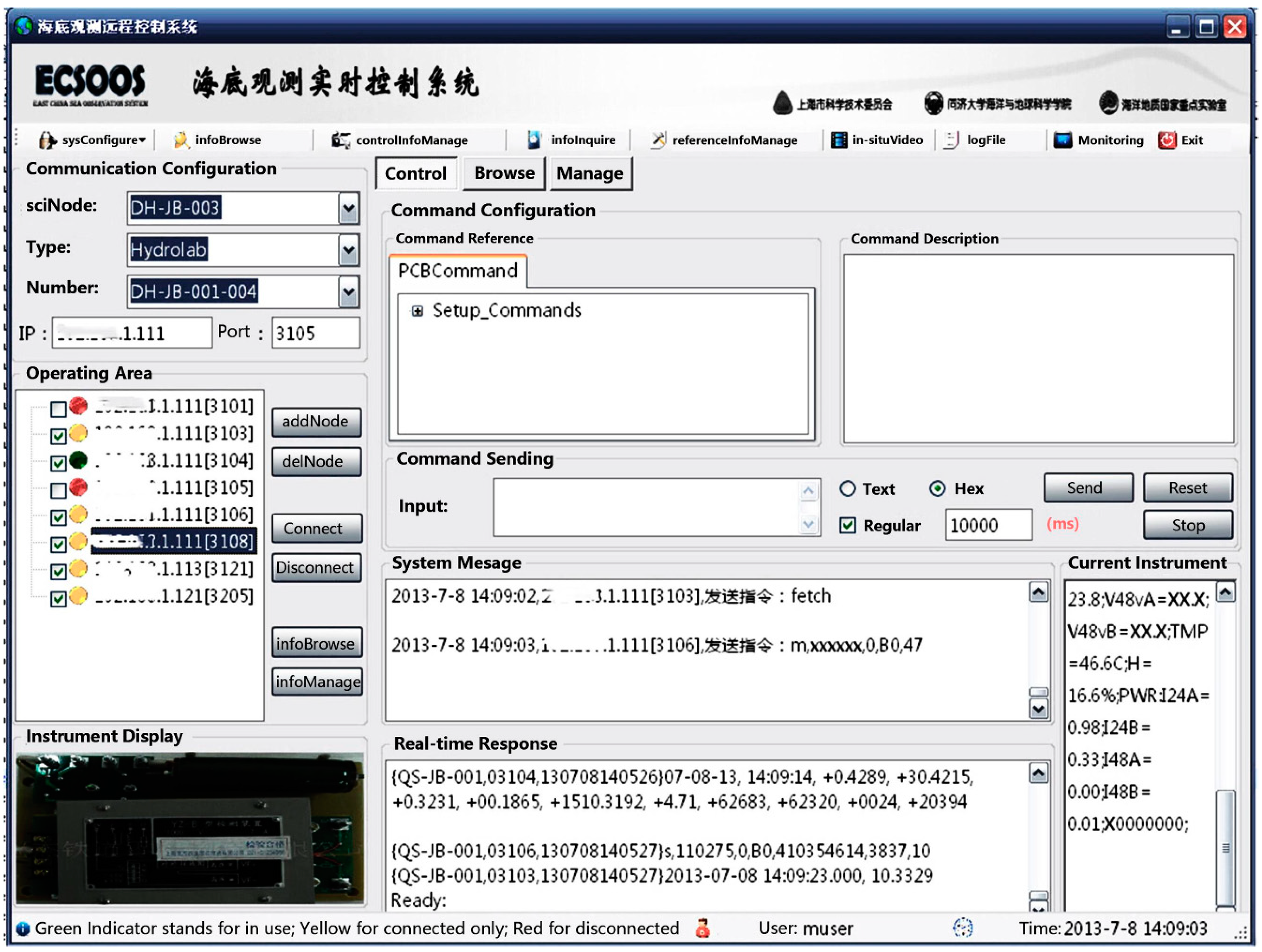
3.2. Prototype System Implementation
3.3. Test and Appication
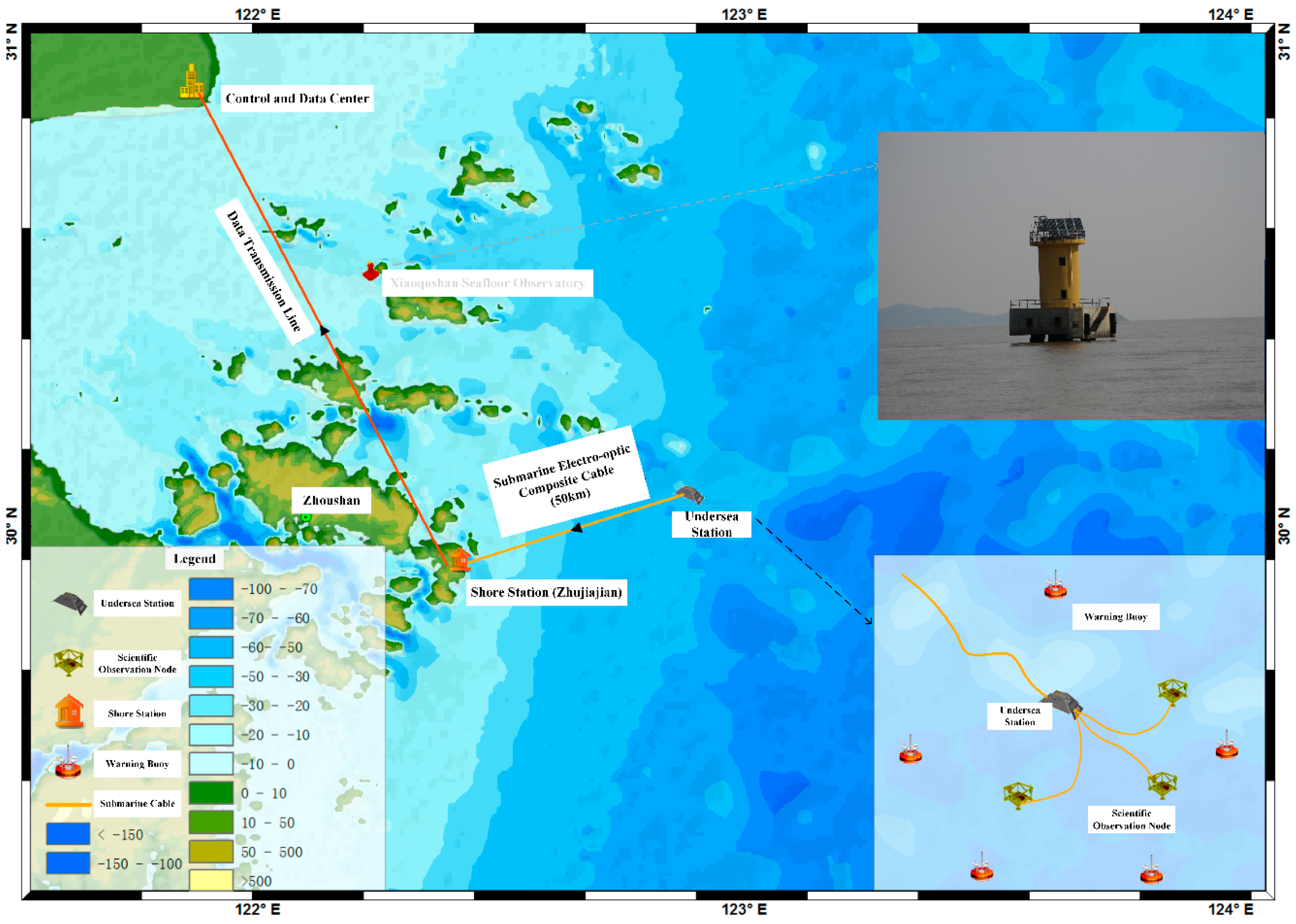
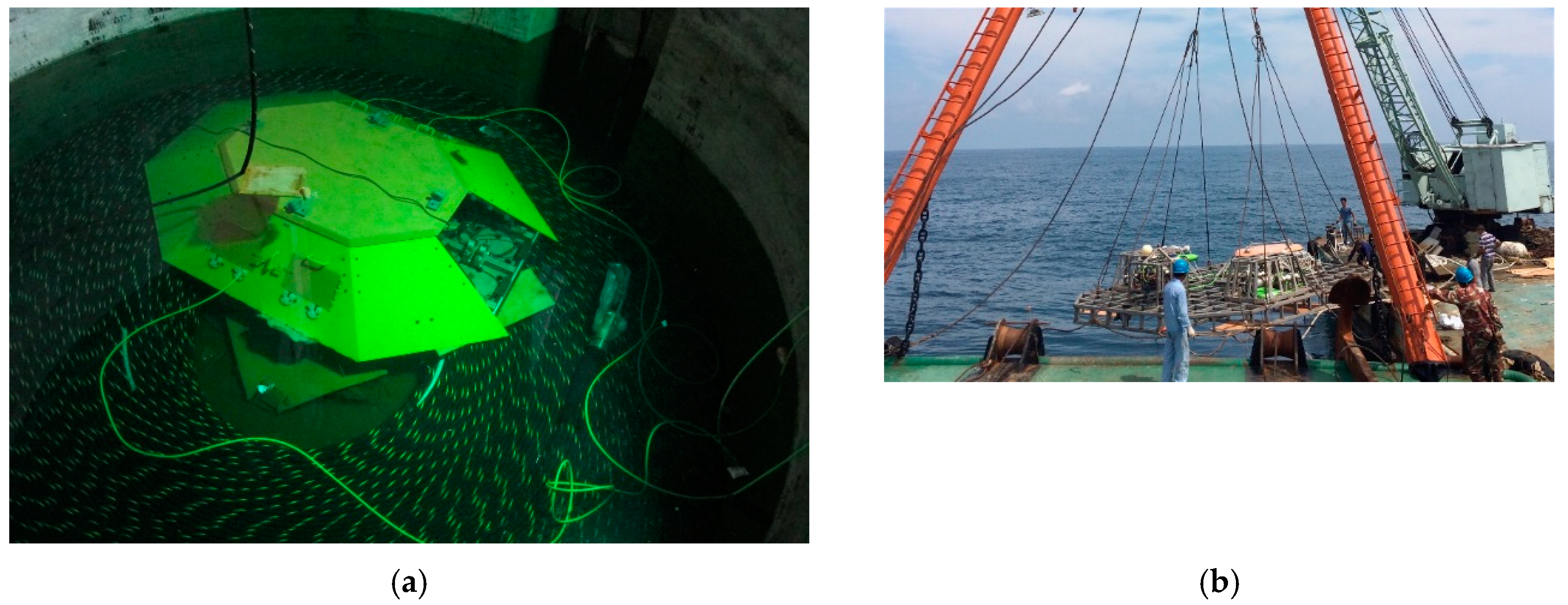
3.3.1. Experimental Scenario: The East China Sea Experimental Seafloor Observatory
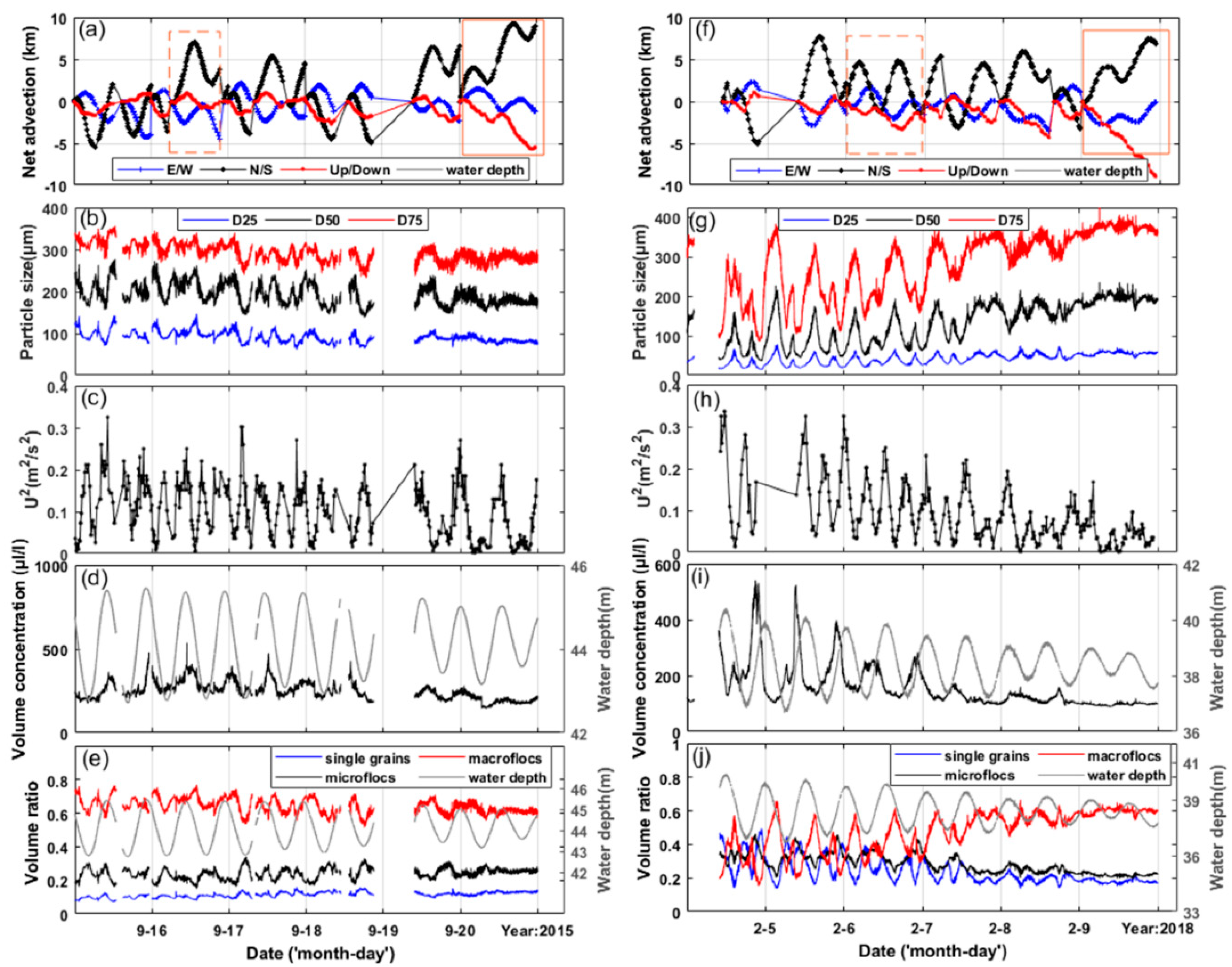
3.3.2. Prototype System Test and Application
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| ECSESO | East China Sea Experimental Seafloor Observatory |
| ECSOOS | East China Sea Ocean Observation System |
| EMSO | European Multidisciplinary Seafloor and water-column Observatory |
| ESOCS | The control system for seafloor observatories in the East China Sea |
| MD | Metadata sets |
| OM | Object Model |
| ONC | Ocean Networks Canada |
| OOI | Ocean Observatories Initiative |
| RA | Sensor Resource Attribute |
| RAis | In situ sensor Resource Attribute |
| RO | Sensor Resource Operation |
| ROis | In situ sensor Resource Operation |
| SRO | Sensor Resource Object |
| SROis | In situ Sensor Resource Object |
References
- National Research Council. Illuminating the Hidden Planet—The Future of Seafloor Observatory Science, 1st ed.; National Academies Press: Washington, DC, USA, 2000; pp. 1–160.
- National Science Foundation. Ocean Sciences at the New Millennium, 1st ed.; Geosciences Professional Services, Inc.: Washington, DC, USA, 2001; pp. 1–152.
- Favali, P.; Beranzoli, L. Seafloor Observatory Science: A Review. Ann. Geophys. 2006, 49, 515–567. [Google Scholar]
- Ruhl, H.A.; André, M.; Beranzoli, L.; Çağatay, M.N.; Colaco, A.; Cannat, M.; Dañobeitia, J.J.; Favali, P.; Géli, L.; Gillooly, M.; et al. Societal need for improved understanding of climate change, anthropogenic impacts, and geo-hazard warning drive development of ocean observatories in European Seas. Prog. Oceanorg. 2011, 91, 1–33. [Google Scholar] [CrossRef]
- Wang, P.X. Current Development in Marine Science and Technology: A Retrospect. Adv. Earth Sci. 2011, 26, 644–649. [Google Scholar]
- Rountree, R.; Aguzzi, J.; Marini, S.; Fanelli, E.; Juanes, F. Towards an optimal design for ecosystem-level ocean observatories. Oceanogr. Mar. Biol. 2020, 58, 235–286. [Google Scholar]
- Danovaro, R.; Fanelli, E.; Aguzzi, J.; Billett, D.; Carugati, L.; Corinaldesi, C.; Dell’Anno, A.; Gjerde, K.; Jamieson, A.J.; Kark, S.; et al. Ecological indicators for an integrated global deep-ocean strategy. Nat. Ecol. Evol. 2020, 4, 181–192. [Google Scholar] [CrossRef] [PubMed]
- Glen, S.M.; Dickey, T.D.; Parker, B.; Boicourt, W. Long-term real-time coastal ocean observation networks. Oceanography 2000, 13, 24–34. [Google Scholar] [CrossRef]
- Duennebier, F.K.; Harris, D.W.; Jolly, J.; Auerbach, J.C.; Jordan, R.; Copson, D.; Stiffel, K.; Babinec, J.; Bosel, J. HUGO: The Hawaii Undersea Geo-Observatory. IEEE J. Ocean. Eng. 2002, 27, 218–227. [Google Scholar] [CrossRef]
- Massion, G.; Raybould, K. MARS: The monterey accelerated research system. Sea Technol. 2006, 47, 39–42. [Google Scholar]
- Cowles, T.; Delaney, J.; Orcutt, J.; Weller, R. The Ocean Observatories Initiative: Sustained Ocean Observing Across a Range of Spatial Scales. Mar. Technol. Soc. J. 2010, 44, 54–64. [Google Scholar] [CrossRef]
- Monna, S.; Falcone, G.; Beranzoli, L.; Chierici, F.; Cianchini, G.; De Caro, M.; De Santis, A.; Embriaco, D.; Frugoni, F.; Marinaro, G.; et al. Underwater geophysical monitoring for European Multidisciplinary Seafloor and water column Observatories. J. Mar. Syst. 2014, 130, 12–30. [Google Scholar] [CrossRef]
- Favali, P.; Chierici, F.; Marinaro, G.; Giovanetti, G.; Azzarone, A.; Beranzoli, L.; De Santis, A.; Embriaco, D.; Monna, S.; Lo Bue, N.; et al. NEMO-SN1 Abyssal Cabled Observatory in the Western Ionian Sea. IEEE J. Ocean. Eng. 2013, 38, 358–374. [Google Scholar] [CrossRef]
- Río, J.; Nogueras, M.; Aguzzi, J.; Toma, D.; Masmitjà, I.; Carandell, M.; Olive, J.; Martínez, E.; Artero, C.; Bghiel, I.; et al. Obsea: A decadal balance for a cabled observatory deployment. IEEE Access 2020, 8, 33163–33177. [Google Scholar]
- Aguzzi, J.; Albiez, J.; Flögel, S.; Rune Godø, O.; Grimsbø, E.; Marini, S.; Pfannkuche, O.; Rodriguez, E.; Thomsen, L.; Torkelsen, T.; et al. A flexible autonomous robotic observatory infrastructure for bentho-pelagic monitoring. Sensors 2020, 20, 1614. [Google Scholar] [CrossRef] [PubMed]
- Aguzzi, J.; Chatzievangelou, D.; Marini, S.; Fanelli, E.; Danovaro, R.; Flögel, S.; Lebris, N.; Juanes, F.; De Leo, F.; Del Rio, J.; et al. New high-tech interactive and flexible networks for the future monitoring of deep-sea ecosystems. Environ. Sci. Technol. 2019, 53, 6616–6631. [Google Scholar] [CrossRef] [PubMed]
- Kasahara, J.; Utada, H.; Kinoshita, H. GeO-TOC Project-Reuse of Submarine Cables for Seismic and Geoelectrical Measurements. J. Phys. Earth 1995, 43, 619–628. [Google Scholar] [CrossRef]
- Shinohara, M.; Kanazawa, T.; Yamada, T.; Machida, Y.; Sakai, S. New Compact Ocean Bottom Cabled Seismometer System Deployed in the Japan Sea. Mar. Geophys. Res. 2013, 35, 231–242. [Google Scholar] [CrossRef]
- Wang, K.L.; Moran, K. NEPTUNE Canada: Science, Operation, and Management. Adv. Earth Sci. 2013, 28, 521–528. [Google Scholar]
- Xu, H.P.; Zhang, Y.W.; Xu, C.W.; Li, J.R.; Liu, D.; Qin, R.F.; Luo, S.Q.; Fan, D.D. Coastal Seafloor Observatory at Xiaoqushan in the East China Sea. Chin. Sci. Bull. 2011, 56, 2839–2845. [Google Scholar] [CrossRef]
- Buck, J.; Bainbridge, S.; Burger, E.; Casari, M.; Casey, K.; Del Rio, J.; Metfies, K.; Fischer, P.; Heffernan, R.; Jirka, S. Ocean data product integration through innovation-The next level of data interoperability. Front. Mar. Sci. 2019, 6, 32. [Google Scholar] [CrossRef]
- Barnes, C.R.; Best, M.M.R.; Johnson, F.R.; Pautet, L.; Pirenne, B. Challenges, Benefits, and Opportunities in Installing and Operating Cabled Ocean Observatories Perspectives from NEPTUNE Canada. IEEE J. Ocean. Eng. 2013, 38, 144–157. [Google Scholar] [CrossRef]
- Rio, J.d.; Toma, D.M.; O’Reilly, T.C.; Bröring, A.; Dana, D.; Bache, F.; Headley, K.L.; Mànuel-Làzaro, A.; Edgington, D. Standards-Based Plug & Work for Instruments in Ocean Observing Systems. IEEE J. Ocean. Eng. 2014, 39, 430–443. [Google Scholar]
- Aguzzi, J.; Chatzievangelou, D.; Francescangeli, M.; Marini, S.; Bonofiglio, F.; Del Río, J.; Danovaro, R. The hierarchic treatment of marine ecological information from spatial networks of benthic platforms. Sensors 2020, 20, 1751. [Google Scholar] [CrossRef] [PubMed]
- Leadbetter, A.; Smyth, D.; Fuller, R.; O’Grady, E.; Shepherd, A. Where Big Data meets Linked Data: Applying standard data models to environmental data streams. In Proceedings of the 2016 IEEE International Conference on Big Data, Washington, DC, USA, 5–8 December 2016. [Google Scholar]
- Rodero, I.; Parashar, M. Data Cyber-Infrastructure for End-to-end Science: Experiences from the NSF Ocean Observatories Initiative. Comput. Sci. Eng. 2019, 22, 60–71. [Google Scholar] [CrossRef]
- Arnaud, B.; Chave, A.; Maffei, A.; Lazowska, E.; Smarr, L.; Gopalan, G. An Integrated Approach to Ocean Observatory Data Acquisition/Management and Infrastructure Control Using Web Services. Mar. Technol. Soc. J. 2004, 38, 155–163. [Google Scholar] [CrossRef]
- Liu, X.R.; Qi, F.J.; Ye, W.Q.; Song, Z.Y.; Zheng, R.E. Underwater control system of OUC-Raman instrument node for seafloor observatory network. J. Harbin Eng. Univ. 2017, 38, 1216–1222. [Google Scholar]
- Gao, S.Y.; Li, Z.G.; Sun, K. Design and Operational Testing of the Data Acquisition and Management System of Seafloor Cabled Observatories. J. Ocean. Tech. 2017, 36, 34–39. [Google Scholar]
- Yu, Y.; Xu, H.P.; Xu, C.W. A Sensor Control Model for Cabled Seafloor Observatories in the East China Sea. Sensors 2018, 18, 3027. [Google Scholar] [CrossRef]
- Yu, Y.; Xu, H.P.; Xu, C.W. A Sensor Web Prototype for Cabled Seafloor Observatories in the East China Sea. J. Mar. Sci. Eng. 2019, 7, 414. [Google Scholar] [CrossRef]
- Hu, C.L.; Li, J.; Chen, N.C.; Guan, Q.F. An Object Model for Integrating Diverse Remote Sensing Satellite Sensors: A Case Study of Union Operation. Remote Sens. 2014, 6, 677–699. [Google Scholar] [CrossRef]
- Botts, M. OpenGIS Sensor Model Language (SensorML) Implementation Specification; Open Geospatial Consortium: Wayland, MA, USA, 2007. [Google Scholar]
- Bello, D.S.S.; Beuzekom, M.; Jansweijer, P.; Verkooijen, H.; Visschers, J. An interface board for the control and data acquisition of the Medipix2 chip. Nucl. Instrum. Meth. A 2003, 509, 164–170. [Google Scholar] [CrossRef]
- Yuan, X.Y.; Niu, Y.; Yu, Q.; Zhang, X.G. Configuration Control Technologies; Publishing House of Electronics Industry: Beijing, China, 2003; pp. 1–287. [Google Scholar]
- Shang, D.H.; Qin, R.F.; Xu, H.P.; Xu, C.W.; Sun, K.L.; Zhou, Y.S. Variation of Suspended Particles in the Bottom Layer of the East China Sea with Data from Seafloor Observatory. Sensors 2019, 19, 5156. [Google Scholar] [CrossRef] [PubMed]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Metadata Set | Metadata Elements |
|---|---|
| MDI | Sensor Name, sensor Type, sensor Platform, sensor Node |
| MDCP | Sensor Geolocation, sensor Quality, observation Parameter, measurement Specification, application Range |
| MDA | Sensor IP, sensor Port, communication Configuration, sensor Interface, responsible Center |
| MDCM | Command Documentation, command Configuration |
| MDP | Observation Valid Time, datafile, database, processing Documentation |
| SROis | ||||||
|---|---|---|---|---|---|---|
| SensorID | RAis | ROis | ||||
| SensorID | MD i | Describe Sensor (MD i) | Describe Task (MD i) | Execute Task (MD i) | Describe Processing (MD i) | Get Observations (MD i) |
| Observation Node | Sensor | Observation Parameter | Sampling Interval |
|---|---|---|---|
| Node 1 (Node of Shanghai Science and Technology Commission) | CTD/SBE16 | Temperature, Conductivity, Dissolved oxygen, Depth | 50 s |
| CTD/SBE26 | Temperature, Conductivity, Depth | 10 s | |
| LISST-100 X | Granularity, Temperature | 10 s | |
| AWAC | Seawater flow field | 25 min | |
| Camera/OE14-376 | Real-time video | continuous | |
| Node 2 (Node of State Oceanic Administration) | Chlorophyll Meter (SDIOI) | Chlorophyll concentration | 5 s |
| CTD (SDIOI) | Temperature, Conductivity, Depth, Turbidity | 5 s | |
| CTD (NOTC) | Temperature, Conductivity, Depth | 8 s | |
| CTD (NOTC) | Temperature, Conductivity, Depth | 8 s | |
| ADCP (Linkquest) | Seawater flow field | 5 min | |
| Camera/OE14-376 | Real-time video | continuous | |
| Node 3 (Node of National High-tech Research and Development Plan) | RBR concerto | Temperature, Conductivity, Depth | 30 s |
| Chlorophyll Meter | Chlorophyll concentration | 30 s | |
| Dissolved Oxygen Sensor | Dissolved oxygen concentration | 30 s | |
| Turbidity Sensor | Turbidity | 30 s | |
| SUNA Sensor | Nitrate concentration | 5 min | |
| HydroC PAH | Concentration of polycyclic aromatic hydrocarbons | 5 s | |
| CO2-Pro CV | Carbon dioxide concentration | 30 min | |
| Methane Sensor | Methane concentration | 10 s | |
| ADV/Nortek Vector Current Meter | Single point velocity | 10 min | |
| ADCP/WHMW300-I-UG11 | Profile velocity | 1 min | |
| TDO-33B | Seismic data | 0.01 s | |
| Camera/OE14-376 | Real-time Video | program control |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, Y.; Xu, H.; Xu, C. An Object Model for Seafloor Observatory Sensor Control in the East China Sea. J. Mar. Sci. Eng. 2020, 8, 716. https://doi.org/10.3390/jmse8090716
Yu Y, Xu H, Xu C. An Object Model for Seafloor Observatory Sensor Control in the East China Sea. Journal of Marine Science and Engineering. 2020; 8(9):716. https://doi.org/10.3390/jmse8090716
Chicago/Turabian StyleYu, Yang, Huiping Xu, and Changwei Xu. 2020. "An Object Model for Seafloor Observatory Sensor Control in the East China Sea" Journal of Marine Science and Engineering 8, no. 9: 716. https://doi.org/10.3390/jmse8090716
APA StyleYu, Y., Xu, H., & Xu, C. (2020). An Object Model for Seafloor Observatory Sensor Control in the East China Sea. Journal of Marine Science and Engineering, 8(9), 716. https://doi.org/10.3390/jmse8090716