1. Introduction
The accurate assessment of ship maneuverability in the design stage is essential for the safe navigation and efficient operation of ships. The International Maritime Organization adopted the “Standards for Ship Maneuverability” in 1993, which provided provisions and recommendations for ship maneuverability indicators. The accuracy of ship maneuverability prediction relies on the quality of the hydrodynamic derivatives estimation. The planar motion mechanism (PMM) test is a widely applied method to obtain the hydrodynamic derivatives of a ship, including the static drift, pure sway and pure yaw tests. Nowadays, the ship maneuvering behavior is mainly predicted by direct, experimental and numerical methods. As a powerful and efficient tool, the popularity of computational fluid dynamics (CFD) is increasing rapidly in the prediction of ship maneuverability.
Tahara et al. [
1] used self-developed solver to predict the hydrodynamic characteristics of S60 at different drift angles. In their study, the mesh independency was carried out by five grids resolutions. Simonsen and Stern [
2] simulated the oblique towing test of Esso Osaka. However, the free surface was ignored in the numerical simulations. Pinto-Heredero et al. [
3] adopted the solver, CFD Ship-Iowa, to simulate the flow field of the Wigley ship with the drift angle from 10° to 60°. The free surface was captured by the level-set method. Ismail et al. [
4] conducted the numerical simulations of the KVLCC2 model with the drift angle from 0° and 12°. They found that a second-order total variation diminishing (TVD) scheme was more suitable to predict the forces/moments acting on the hull. Xing et al. [
5] also used the solver, CFD Ship-Iowa, to carry out numerical simulations of oblique towing tests of a KVLCC2 tanker at different drift angles (0°, 12°, 30°). In the study, a detached eddy simulation (DES) was applied to capture the flow separation phenomenon and the vortex structures around the hull. In the numerical simulations, the total number of grids was 13.0 million. However, the free surface was not taken into account. Stern et al. [
6] summarized the numerical schemes in the simulation of ship maneuverability and found that using the DES method combined with enough grid refinement can obtain a more accurate numerical prediction. Meng and Wan [
7] used the unsteady Reynolds averaged Navier–Stokes (RANS) to simulate the flow field of KVLCC2M at different drift angles in deep and shallow water. The connected vessels’ effect in shallow water was captured and abundant information in the flow field was presented. Wang et al. [
8] simulated the flow field of ship hull at six drift angles by the CFD solver, naoe-FOAM-SJTU. The predicted hydrodynamic derivatives were in good agreement with the experiments.
Broglia et al. [
9] conducted numerical predictions for the dynamic pure sway and pure sway tests of KVLCC1 and KVLCC2. They found that the stern of hull was the main region inducing the lateral force. Toxopeus et al. [
10] adopted the dynamic mesh to realize the ship motion of KVLCC2 with full appendages. The predicted lateral force and yawing moment were in good agreement with the experiments. Cura-Hochbaum et al. [
11] also carried out the numerical simulation of the dynamic test of KVLCC1 tanker based on RANS equations. The predicted hydrodynamic derivatives agreed well with the experiment results. Simonsen and Stern [
12] simulated the pure yaw test of KRISO Container Ship (KCS) and analyzed the uncertainty of forces/moments acting on the hull. Sakamoto et al. [
13,
14] and Yoon et al. [
15,
16] used the solver, CFD Ship-Iowa, to simulate the static and dynamic PMM tests of DTMB 5415. The predicted hydrodynamic derivatives were compared with the test results, and the highest number of errors of linear hydrodynamic derivatives was less than 10%. Kim et al. [
17] simulated the PMM test for a KCS ship by the CFD solver SHIP Motion. The predicted results of the static drift test and the dynamic pure sway test were in good agreement with the tests, but the predicted results of the pure yaw test were not accurate enough. Yang et al. [
18] simulated the pure sway tests of the hull in deep and shallow water by solving unsteady RANS equations. However, the free surface was not taken into consideration in the numerical simulations. The effect of speed and water depth on the hydrodynamic performance of the hull in the pure sway test was investigated by Liu et al. [
19]. In their studies, the CFD solver, naoe-FOAM-SJTU, was used to solve unsteady RANS equations by coupling it with the shear stress transport (SST)
k-
ω turbulence model. The lateral force and yawing moment increased rapidly. Wang and Wan [
20] also adopted the CFD solver, naoe-FOAM-SJTU, to simulate the dynamic tests of DTMB 5415, and the solver was coupled with the overset grid technology. The predicted hydrodynamic derivatives were in good agreement with the experiments.
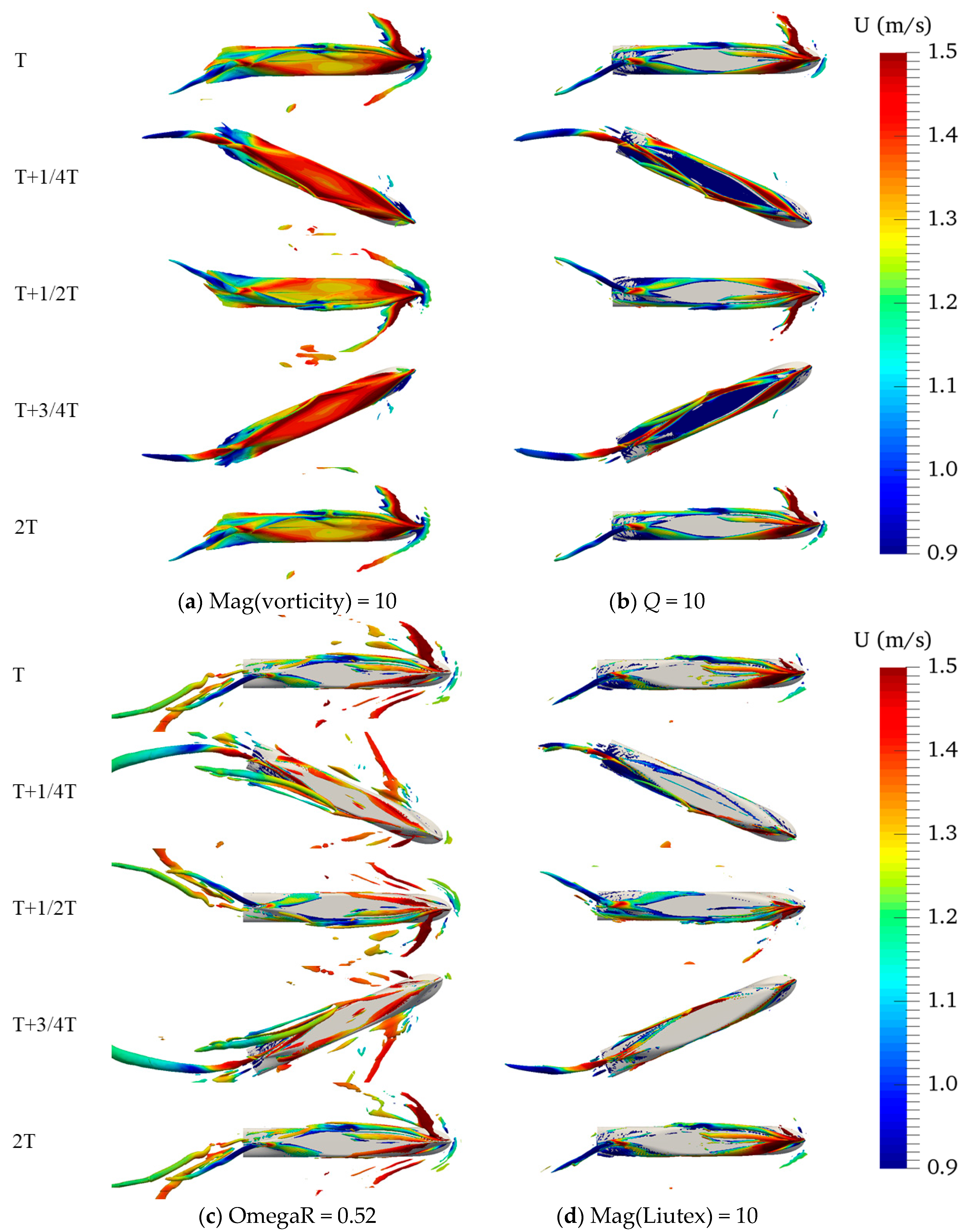
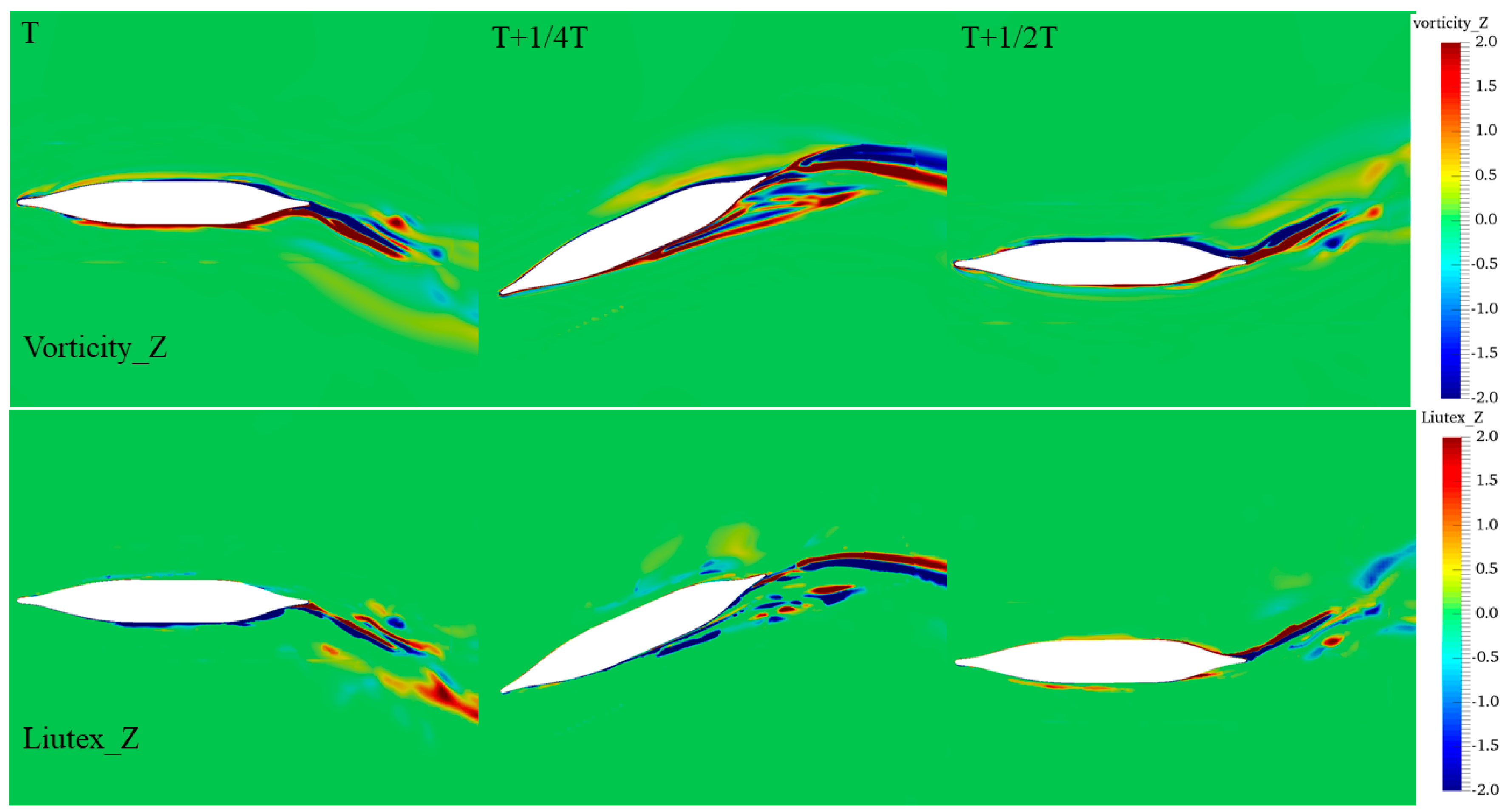
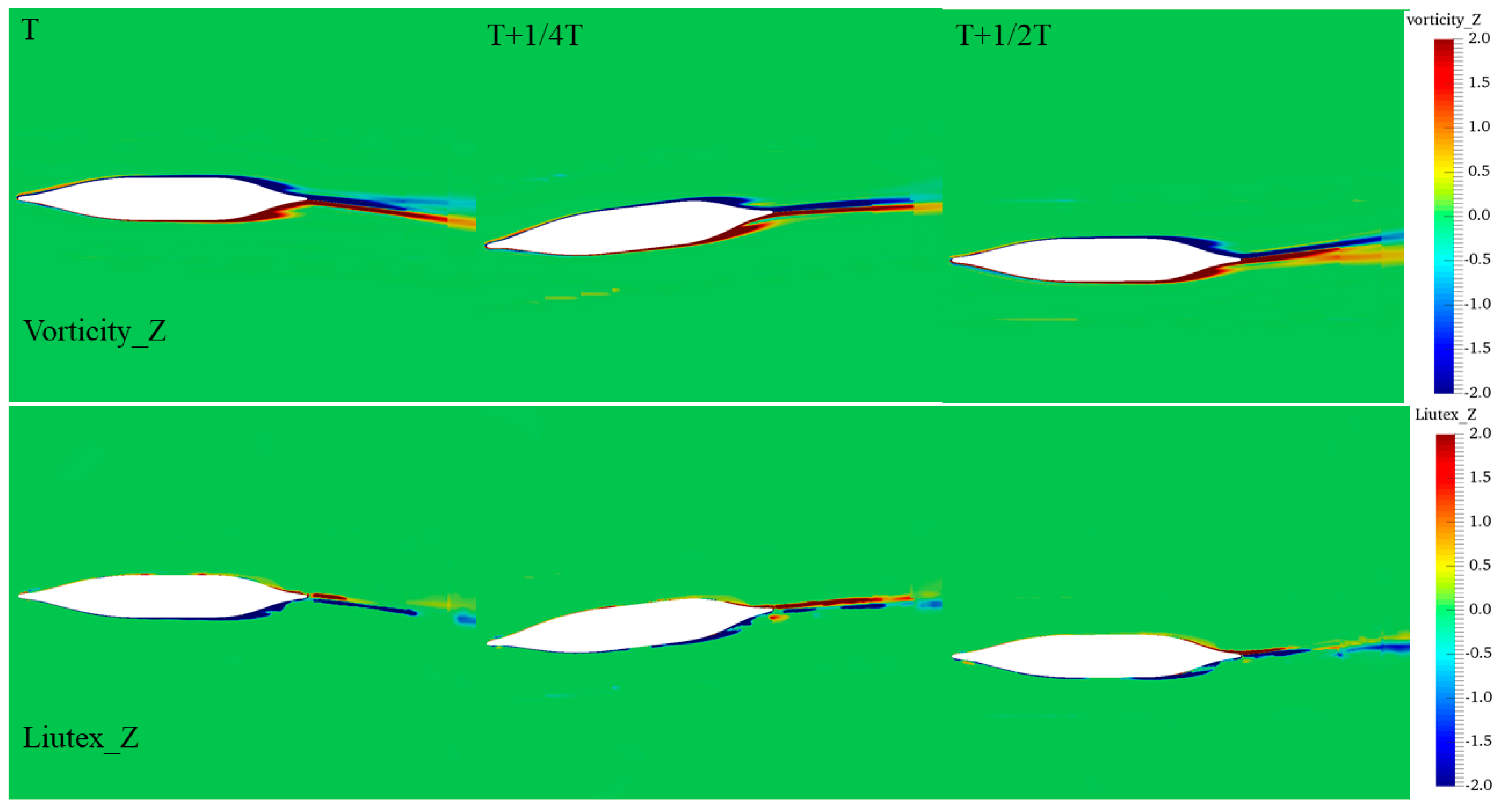
So far, the main aim of a ship planar motion mechanism is the hydrodynamic derivatives of the hull. There are few studies to simulate the detailed flow field in the larger separation flow, especially by using the new vortex identification methods. In this paper, reliable numerical schemes are presented, and four vortex identification methods are applied to analyze the separation flow in the PMM tests of a Yupeng ship.
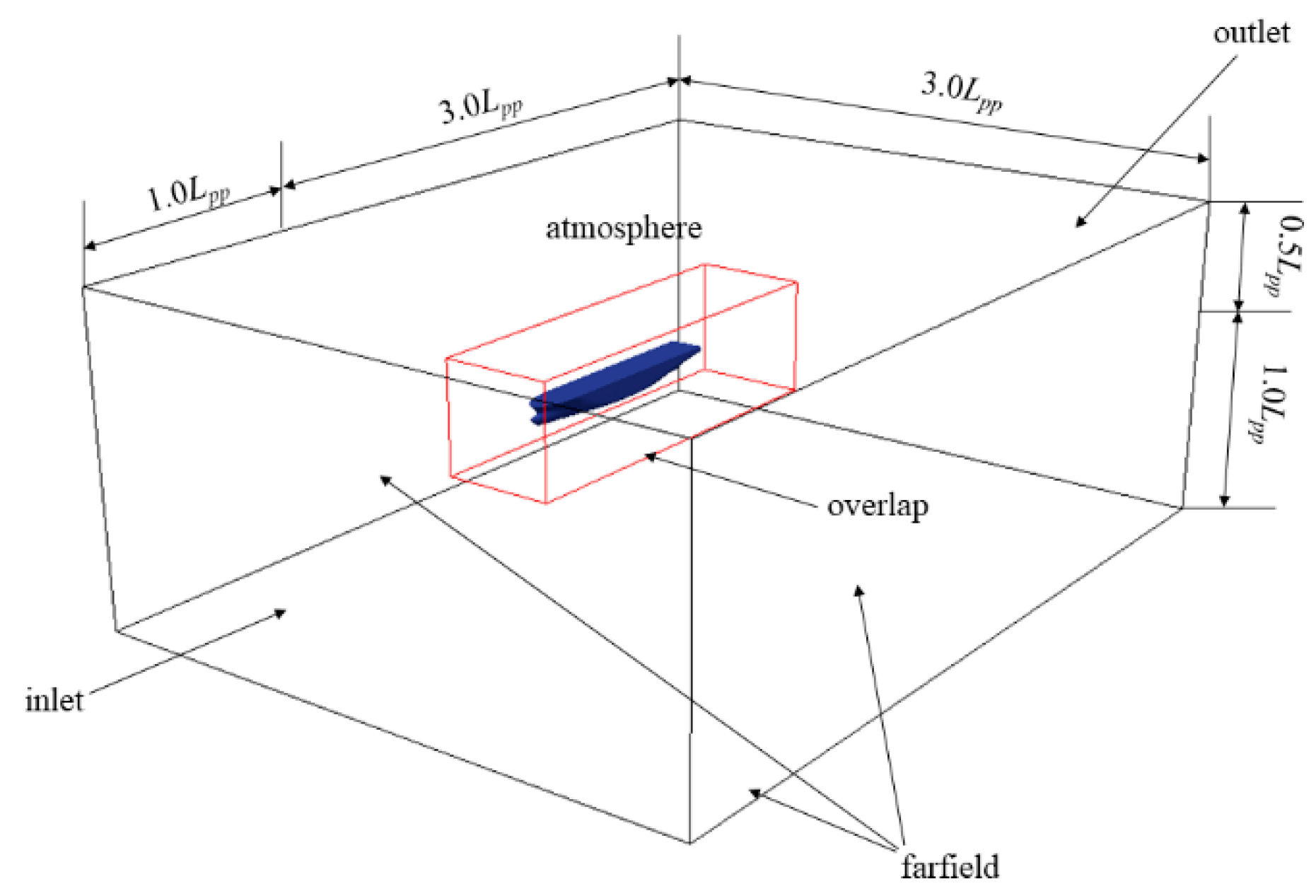
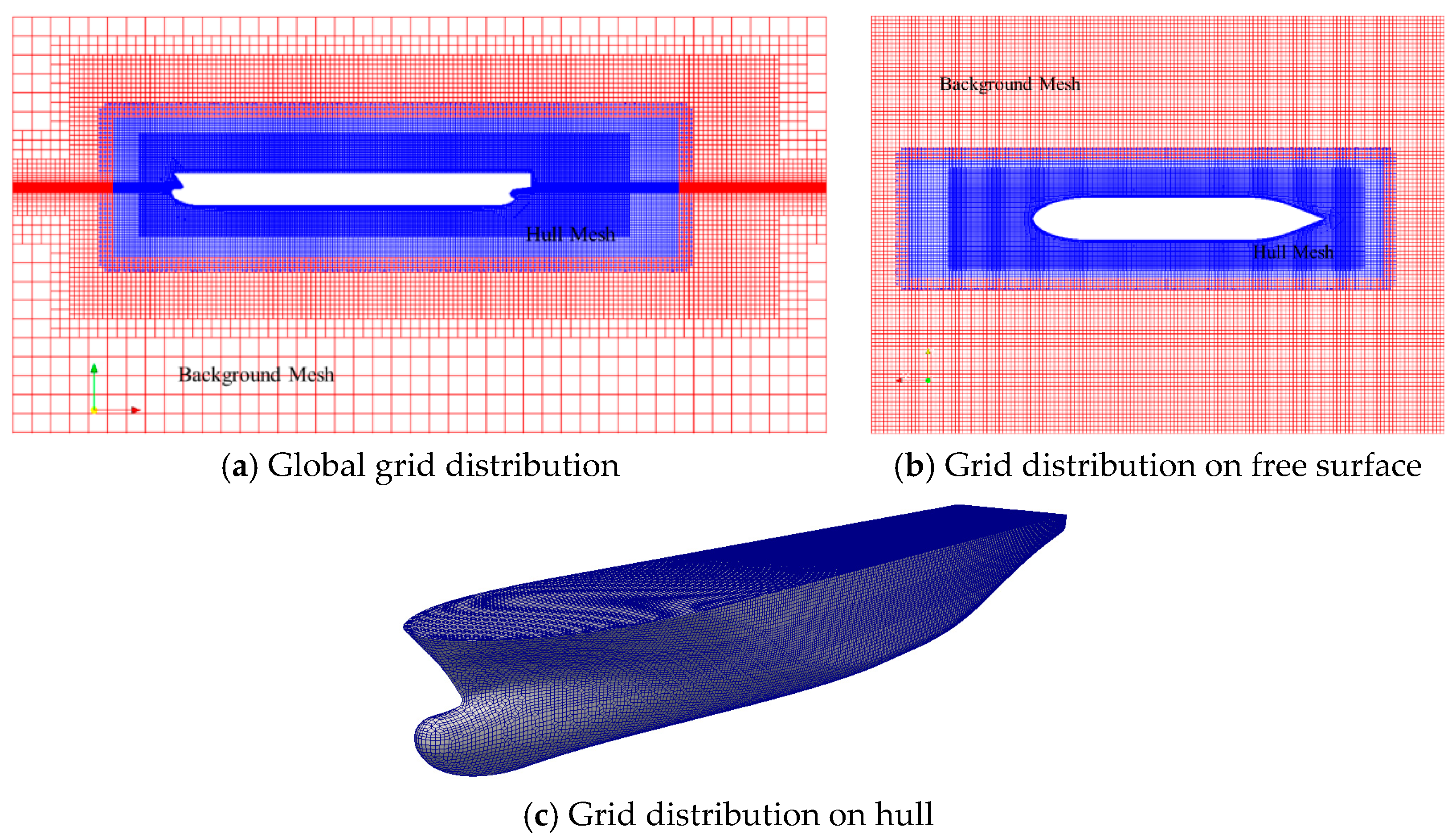
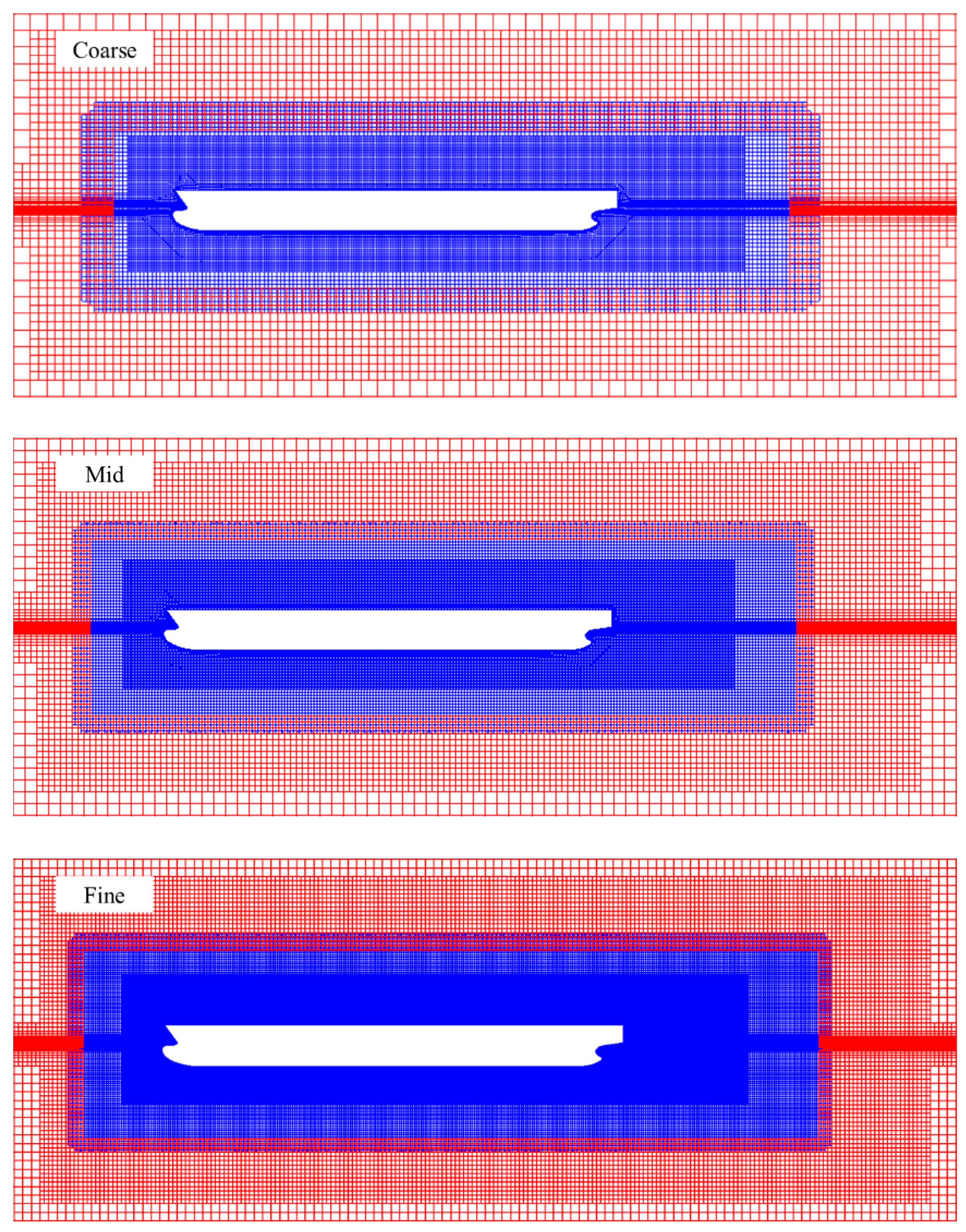
In the present work, the authors perform the numerical simulations of static drift tests and dynamic tests of a Yupeng Ship. The CFD solver, naoe-FOAM-SJTU, is applied in the numerical simulations. Unsteady RANS equations coupled with an SST k-ω turbulence model are adopted to solve the flow field. The main framework of this paper goes as follows. The first part is the basic numerical methods and the vortex identification methods. The second part is the geometry model, grid generation and test conditions. Then comes the results and analysis, which contains the predicted results of the static drift, pure sway and pure yaw tests of the Yupeng Ship. In this section, the forces/moment, free surface, dynamic pressure and vortex structures are presented. Finally, the conclusion of this paper is drawn.
5. Conclusions
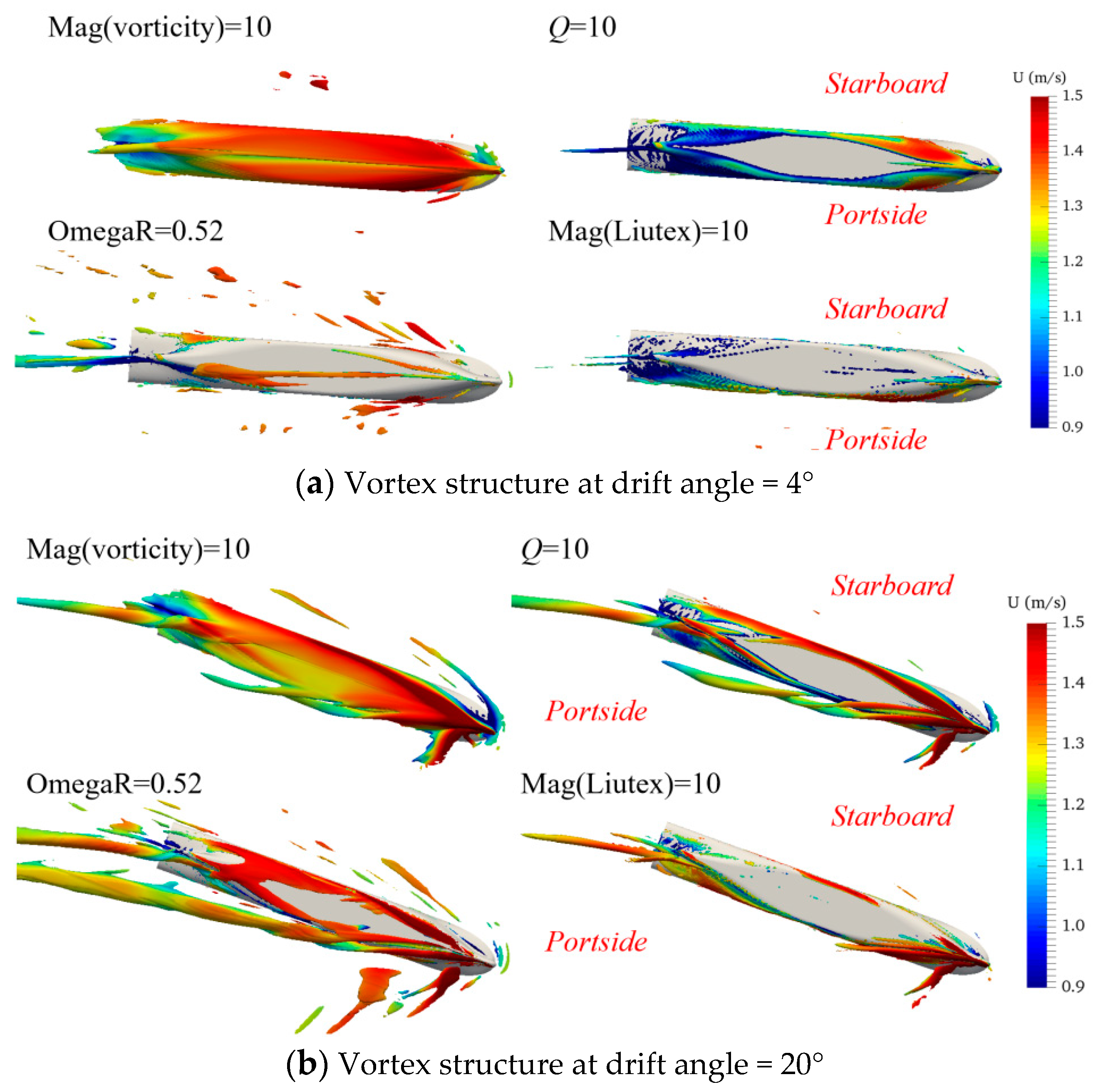
In the present study, an in-house CFD solver, naoe-FOAM-SJTU, is used to perform numerical simulations of planar motion mechanism (PMM) tests of a Yupeng ship. Unsteady RANS equations combined with an SST k-ω turbulence model are adopted to solve the complex viscous flow and a dynamic overset grid method is applied to simulate the large amplitude motion of the hull. The paper not only compares the time histories of predicted and experimental forces and moments acting on the hull, but also uses four vortex identification methods to capture the vortex structures in the large separated flow, which are very helpful for a further analysis on the flow mechanism around the hull.
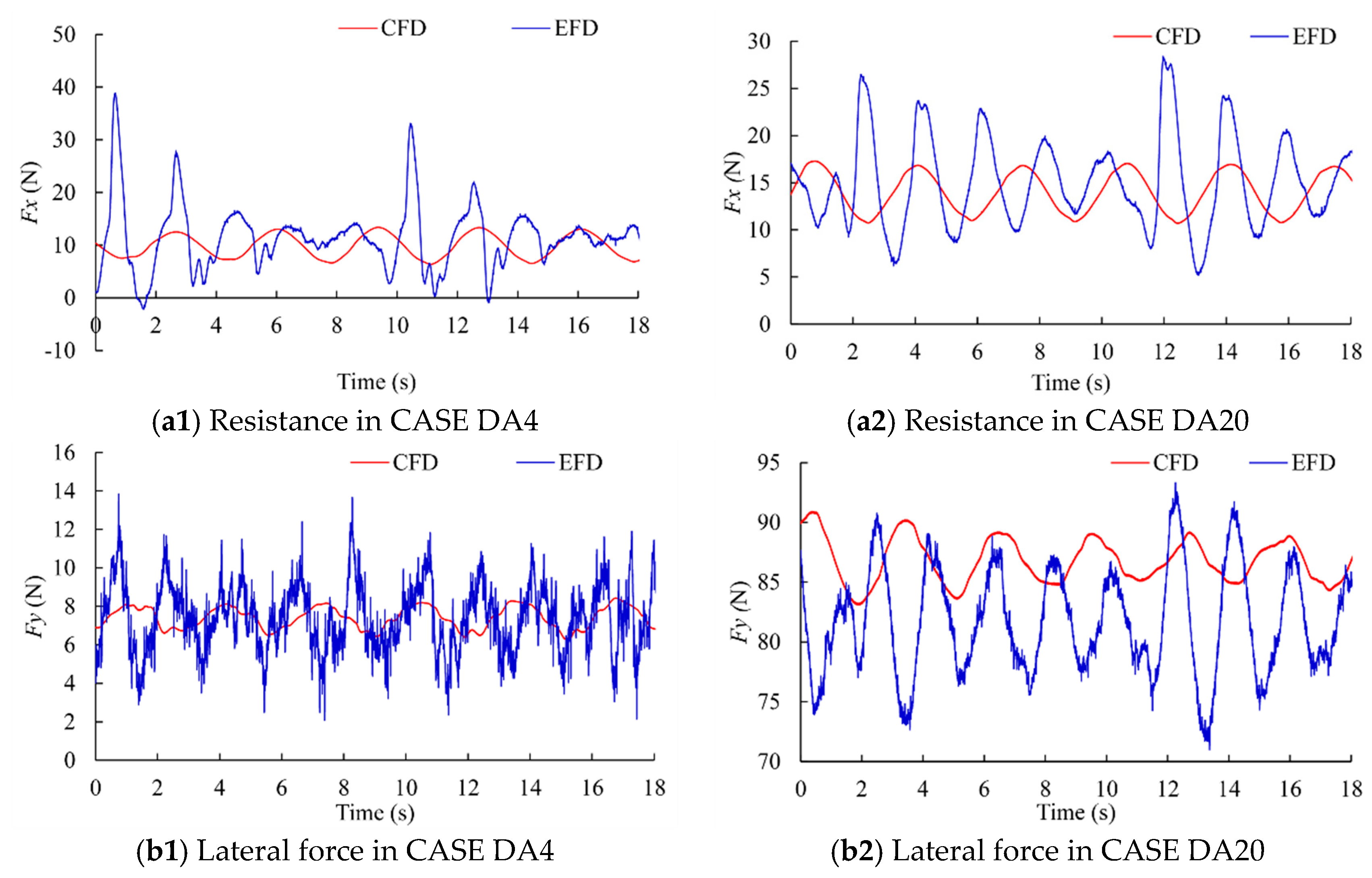
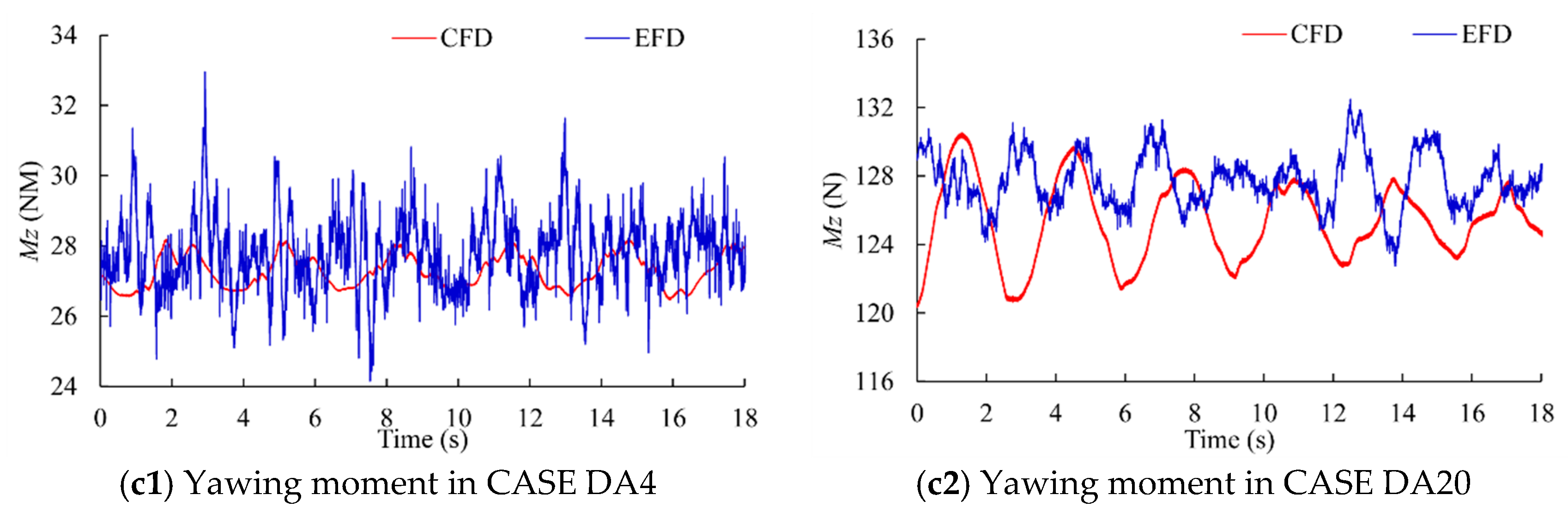
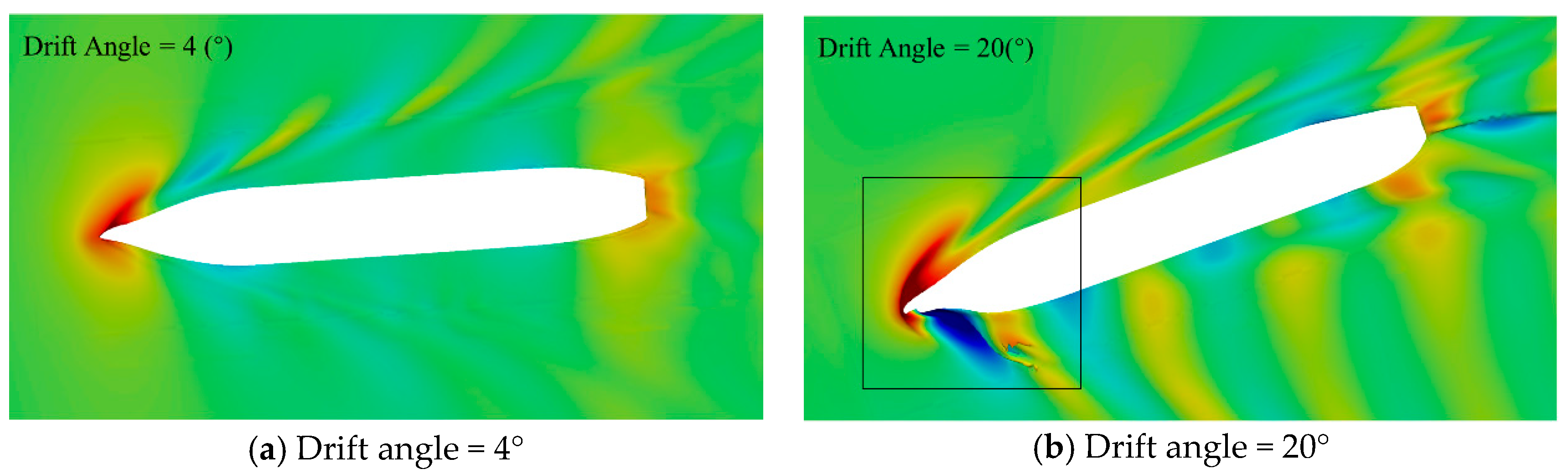
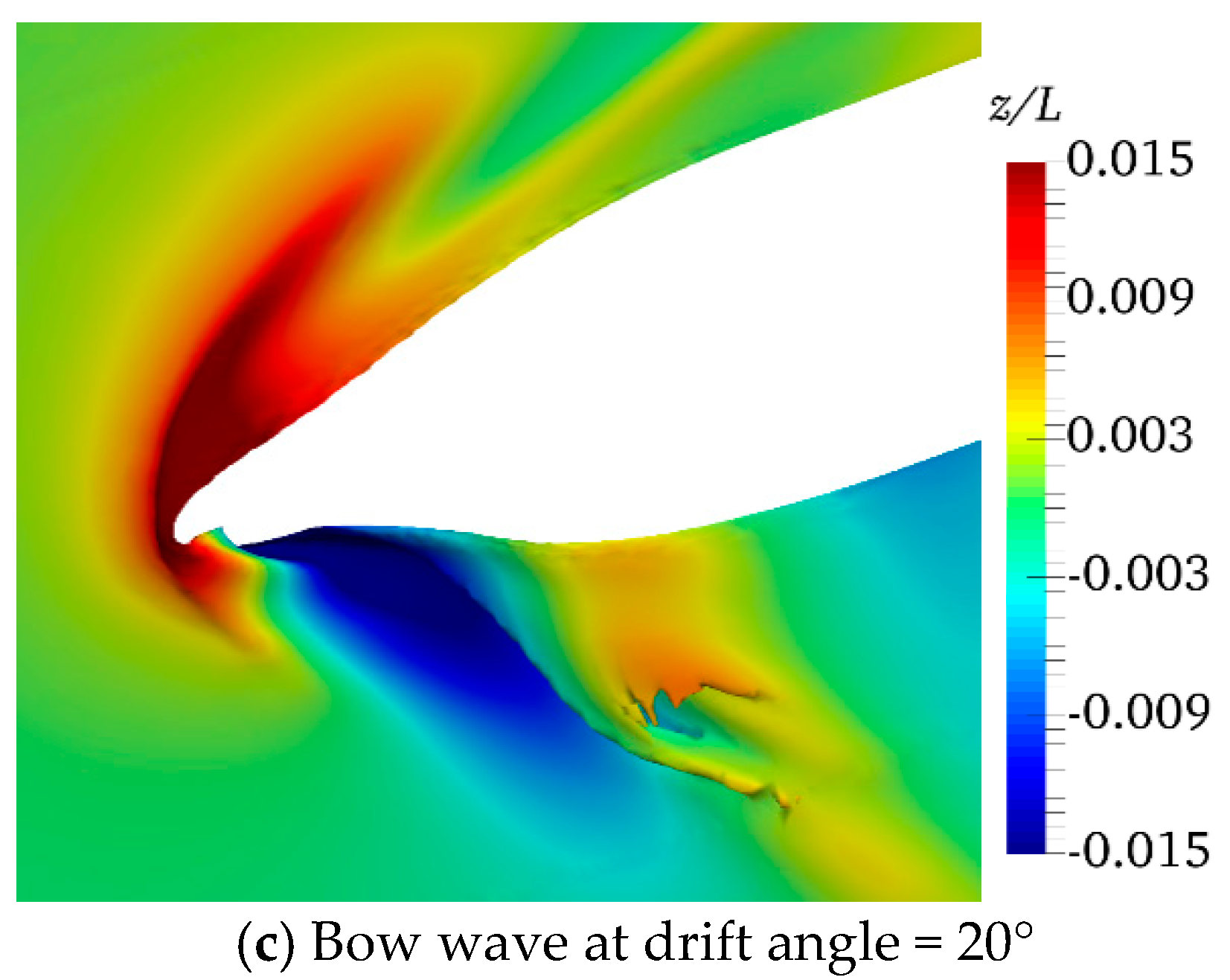
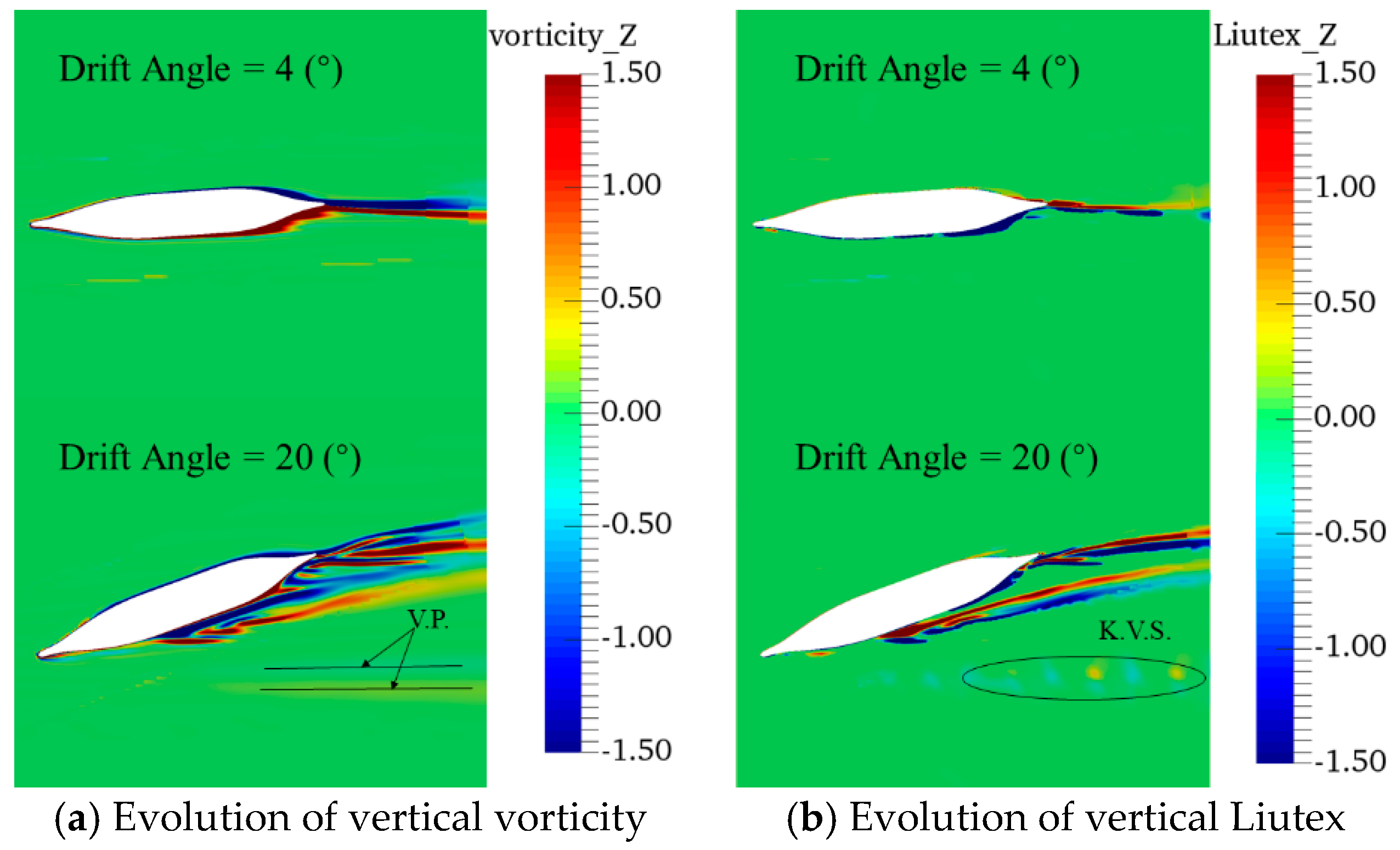
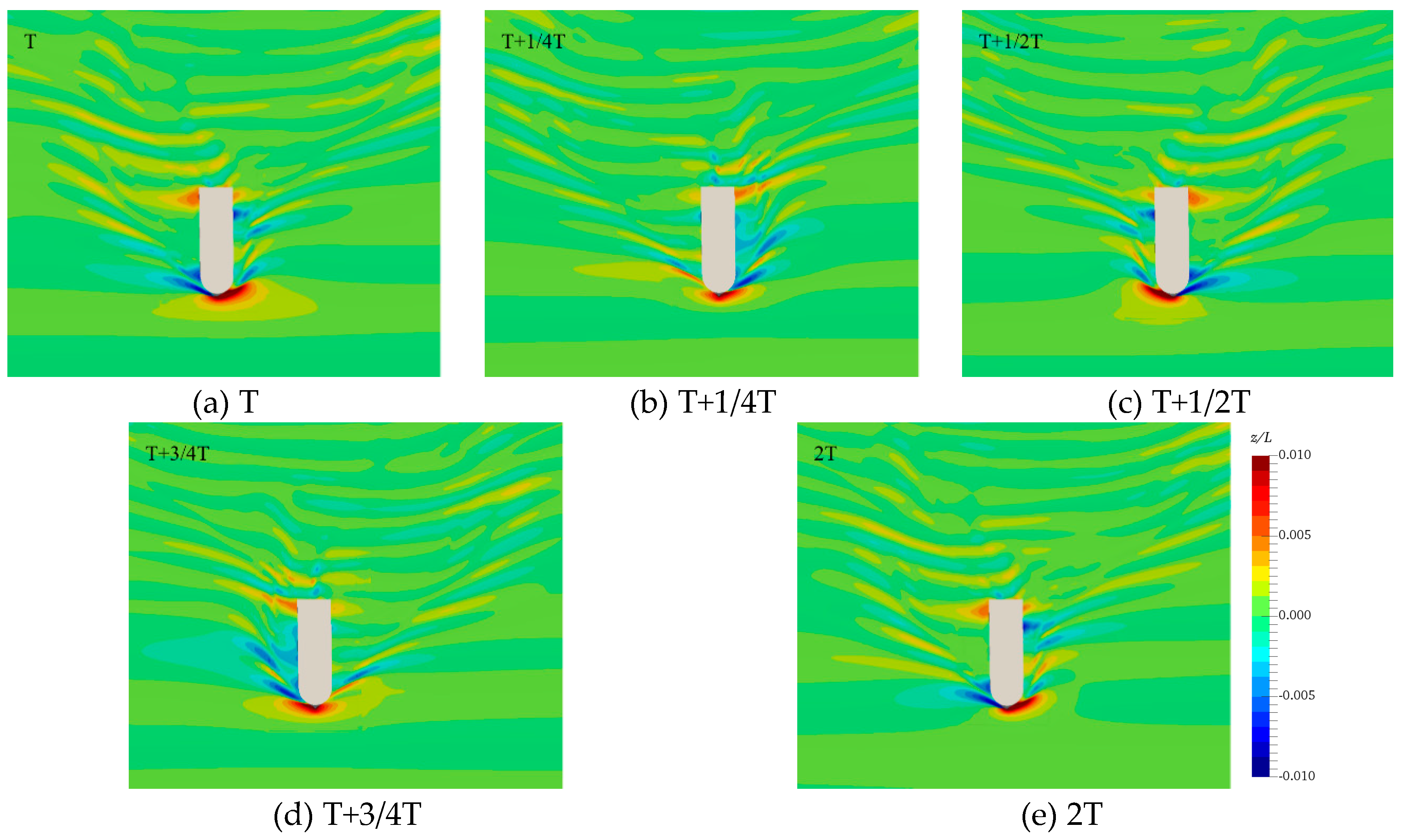
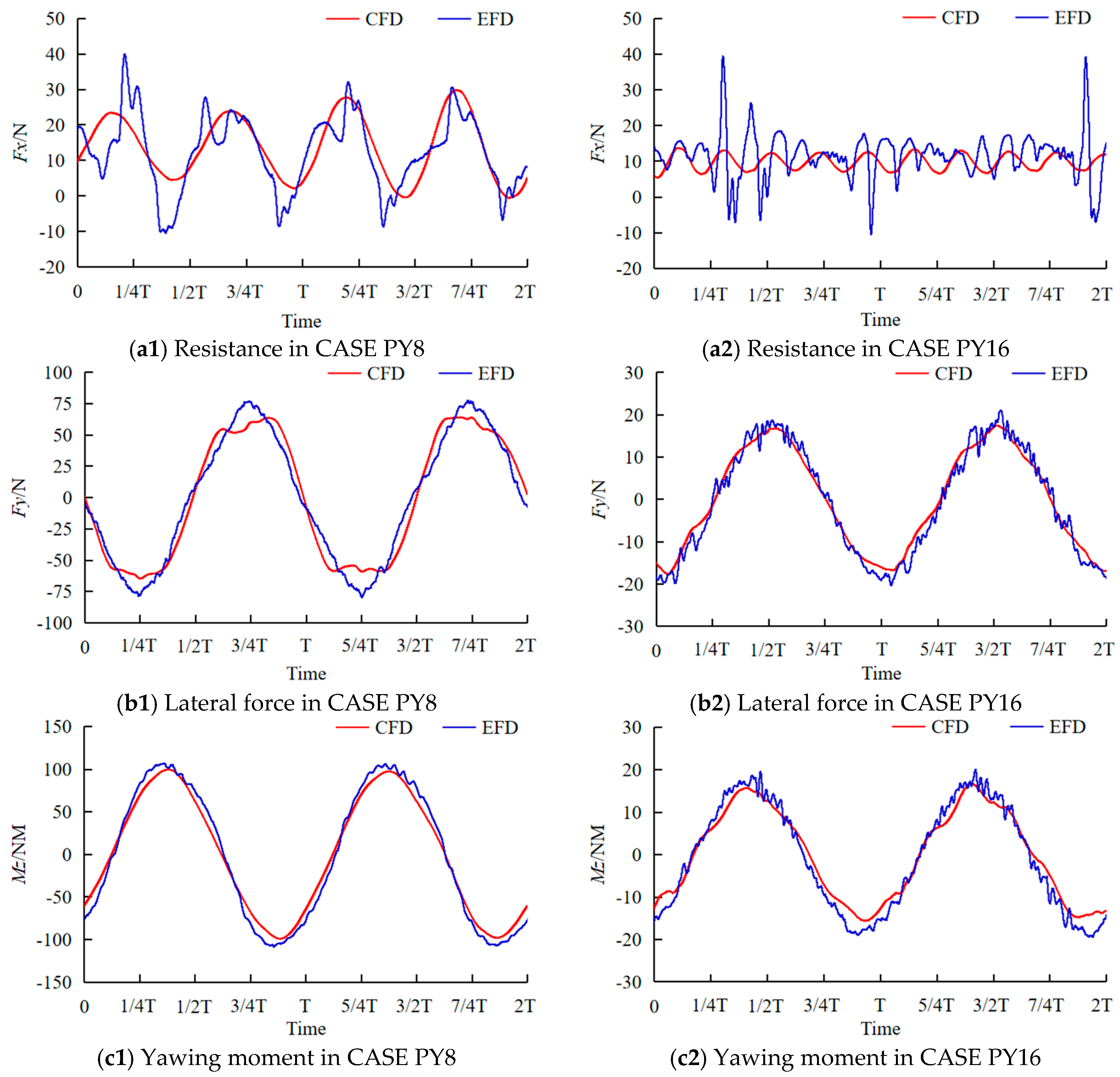
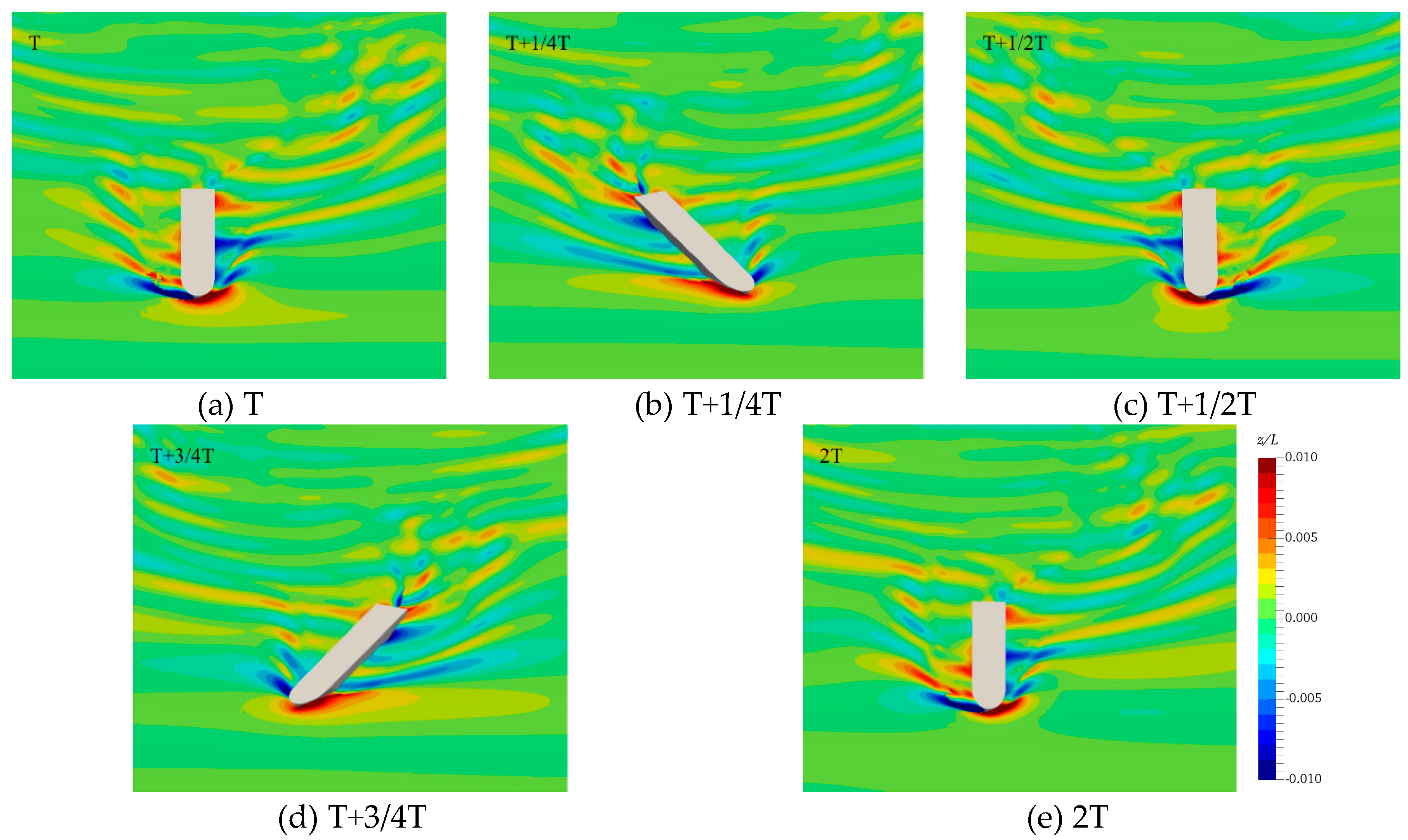
As for the PMM tests, the predicted forces and moments show a good agreement with the experimental data. It indicates that the present numerical schemes are suitable for the simulations of the large separation flow. In the static drift tests, even though the predicted resistance is not accurate enough since there are big fluctuations in the experimental data, the errors of the lateral force and yawing moment are less than 6%. The evolution of the free surface is also captured well and the bow wave breaking is visible at a larger drift angle (CASE DA 20). In the dynamic tests, the shorter period leads to a larger lateral force and yawing moment. In the pure yaw tests, the lateral force in CASE PY16 is only 16.28N, but it increases to 77.28N rapidly when the period is shortened to 8 s. The periodic variation of the lateral force and yawing moment are confirmed by the evolution of the free surface.
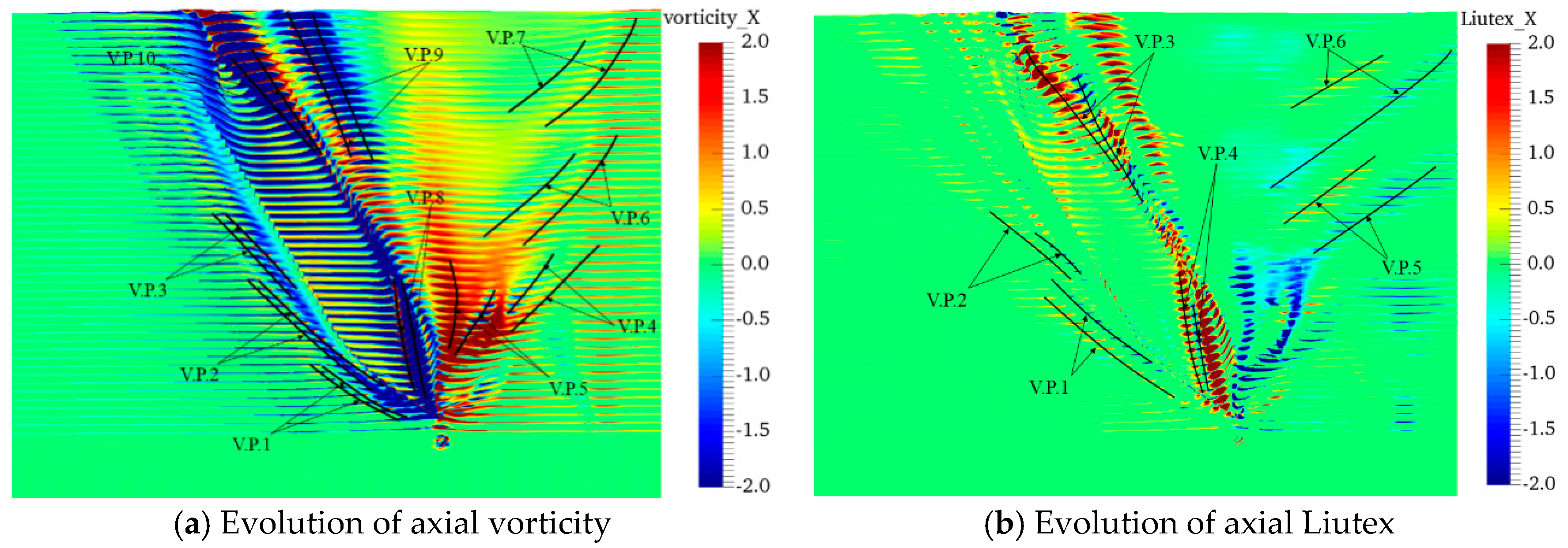
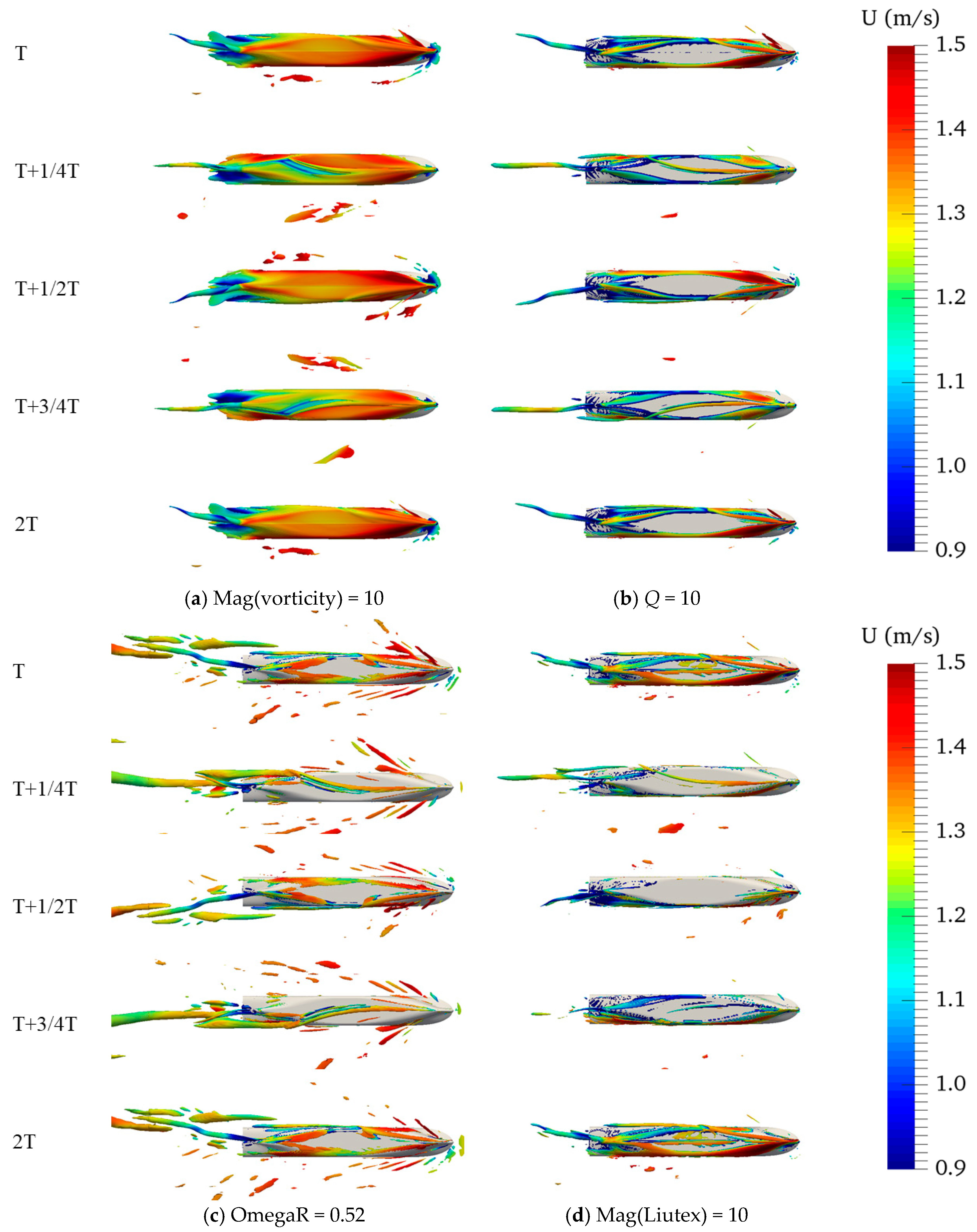
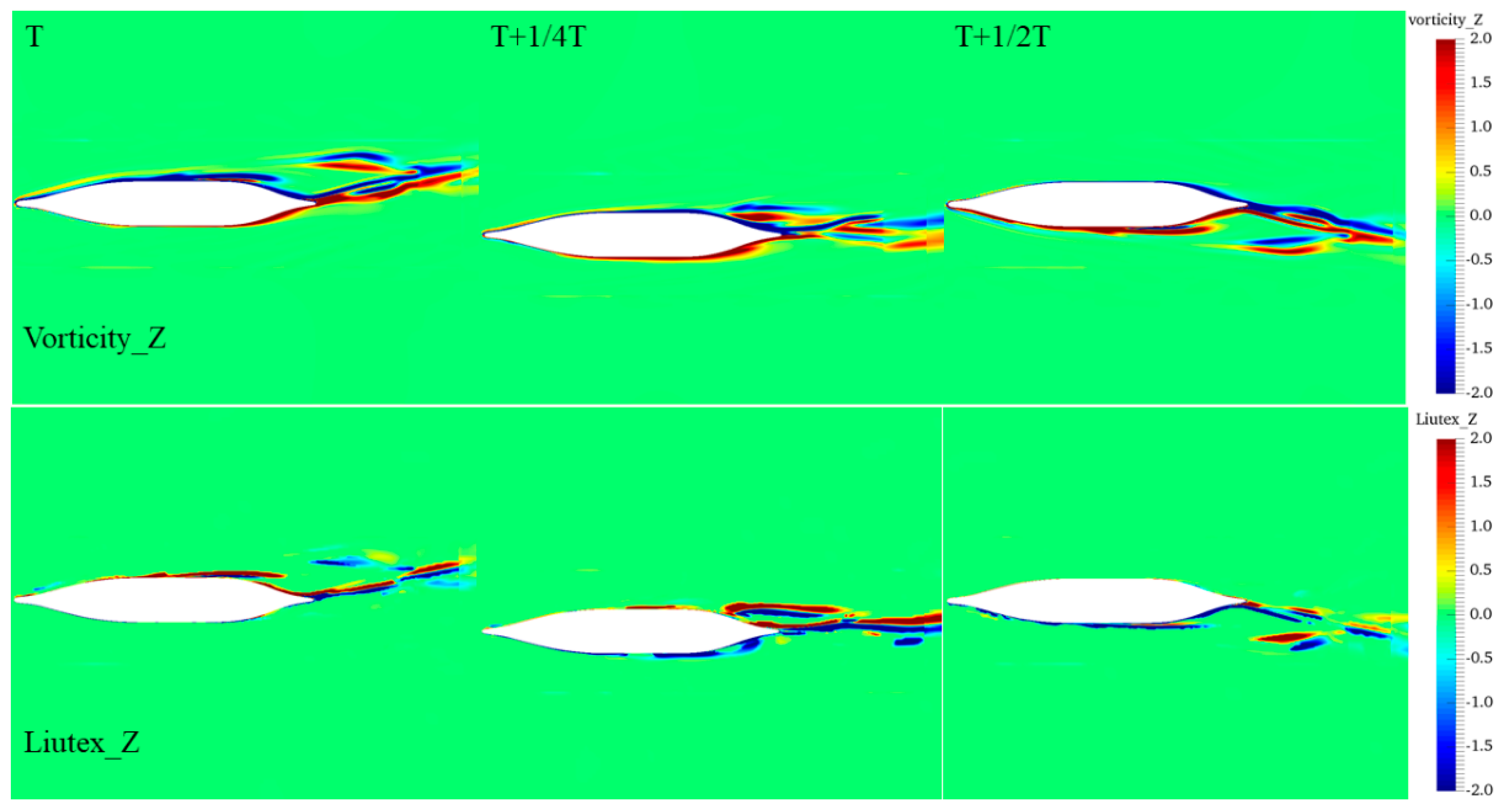
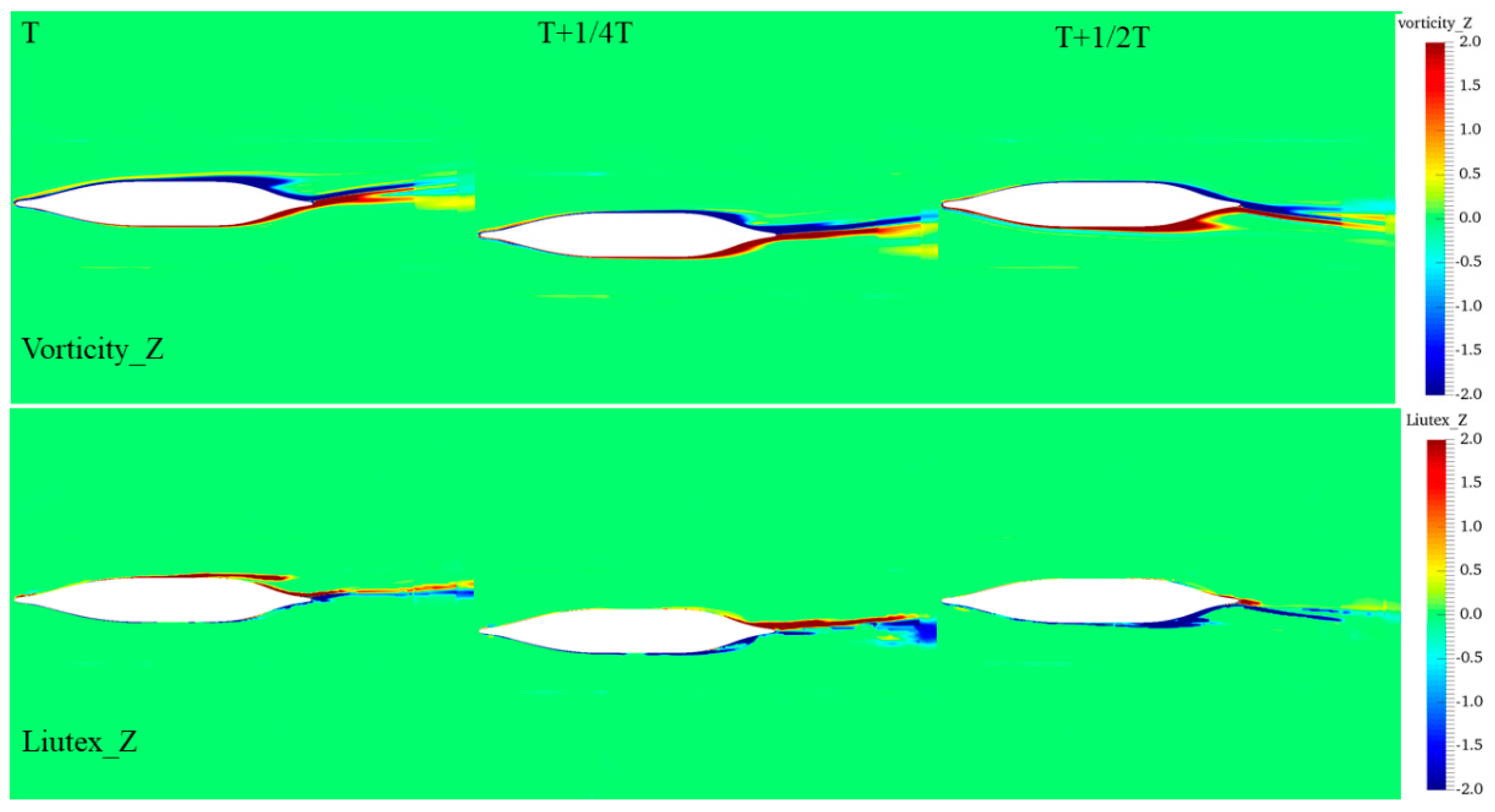
By comparing the vortex structures captured by four vortex identification methods, it is found that the OmegaR method with the insensitive threshold is able to capture more vortex structures in the viscous flows. More breaking and detailed vortex structures are obtained by the Liutex method. The vortex structures obtained by vorticity (first generation) covers the hull fully, which is not reasonable. The Q criterion (second generation) is very sensitive to the artificial threshold. In conclusion, the third generation of vortex identification methods are more suitable for capturing the vortex structures in the large separated flow of the ship.
In the future, DES approaches will be used to solve the viscous flow fields around the ship hull and the results will be compared with the RANS method.

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}