A Novel Vision-Based Towing Angle Estimation for Maritime Towing Operations

 , , ,
, , ,
Abstract
1. Introduction
2. Literature Review
2.1. Towing Research
2.2. Sea–Sky Line Detection
2.3. Salient Feature Detection
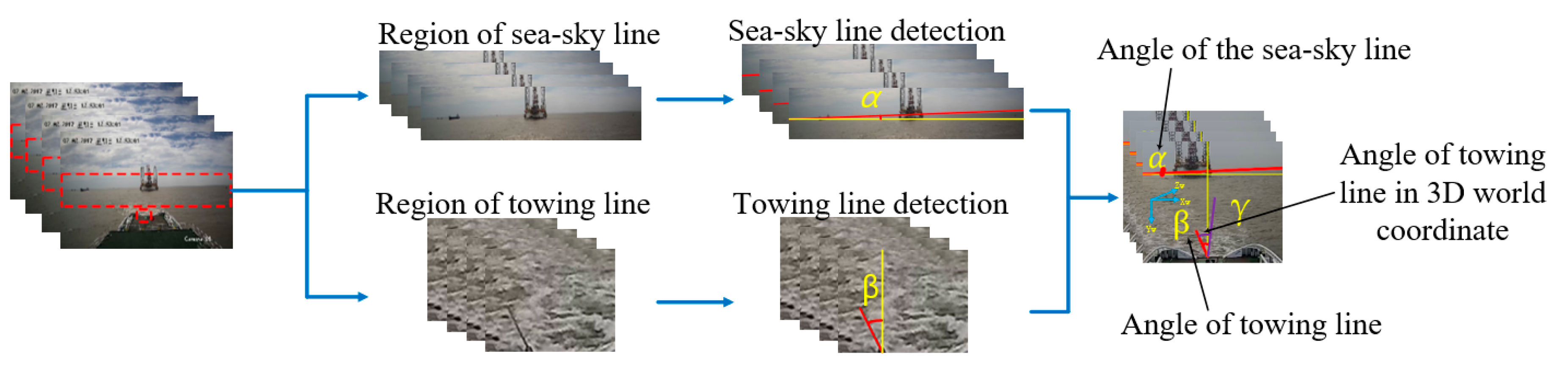
3. An Overview of the Framework
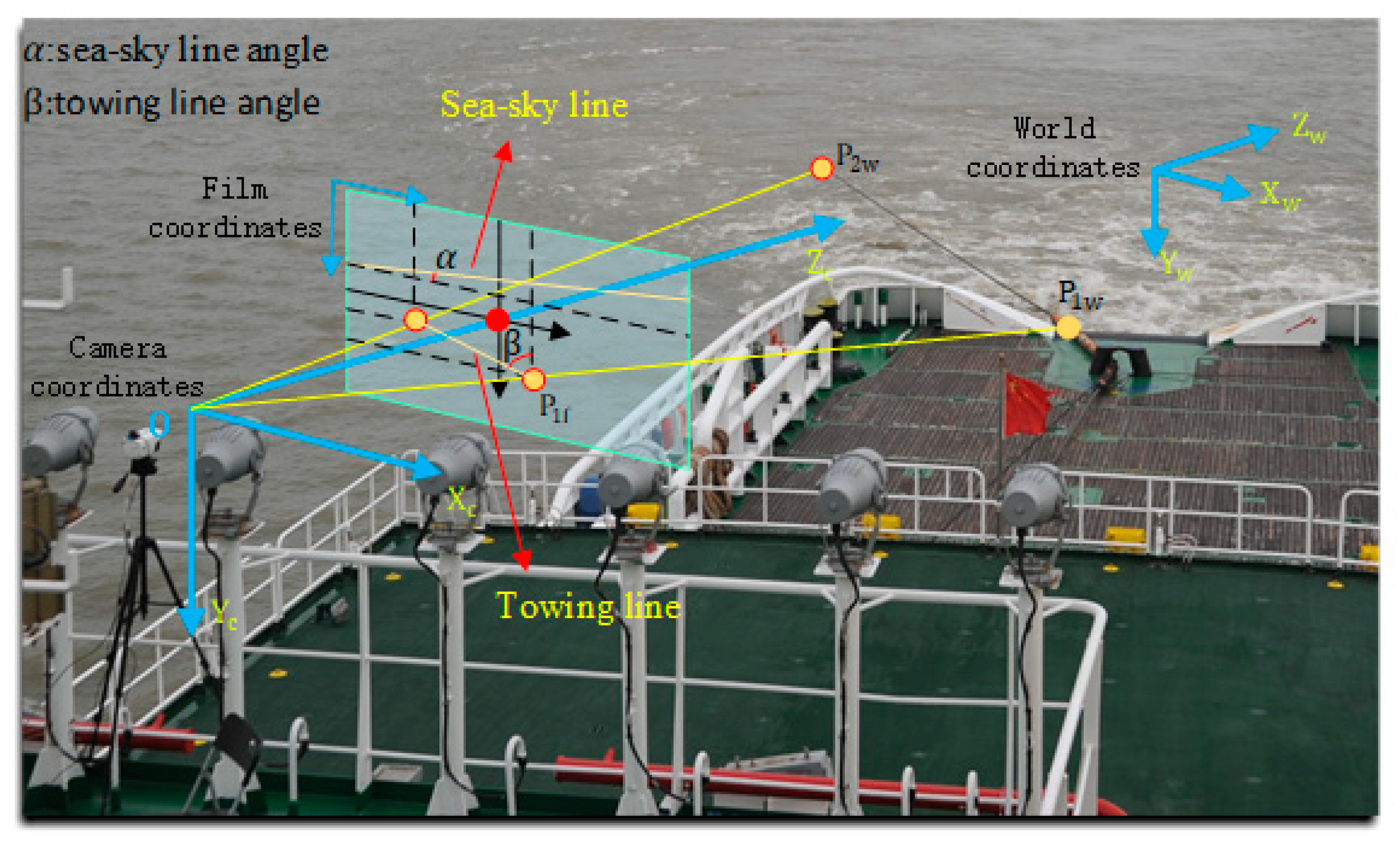
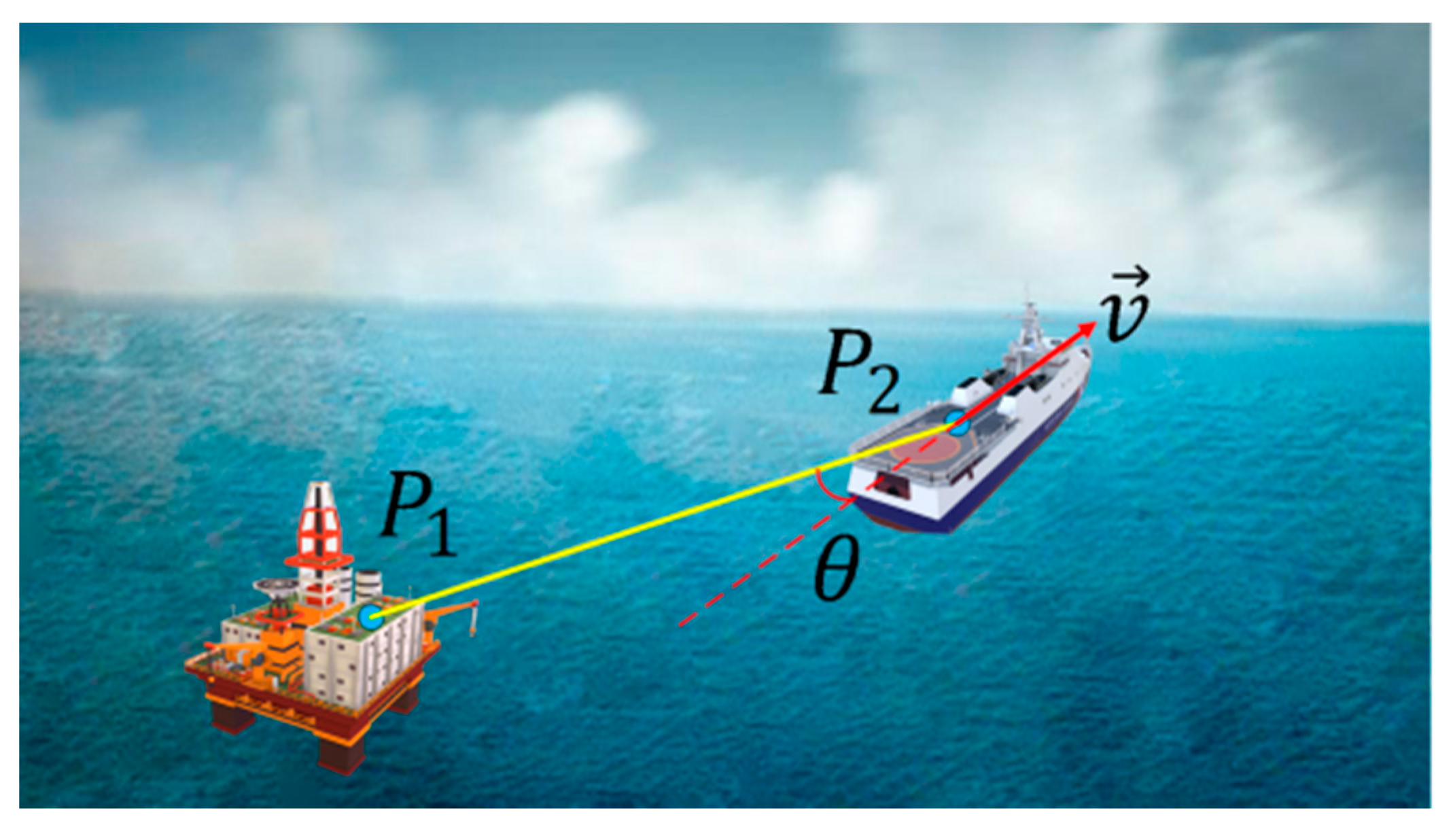
3.1. The Geometrical Projection Model
3.2. Sea–Sky Line Detection
3.3. Towing Line Angle Estimation in Image Pixel Coordination
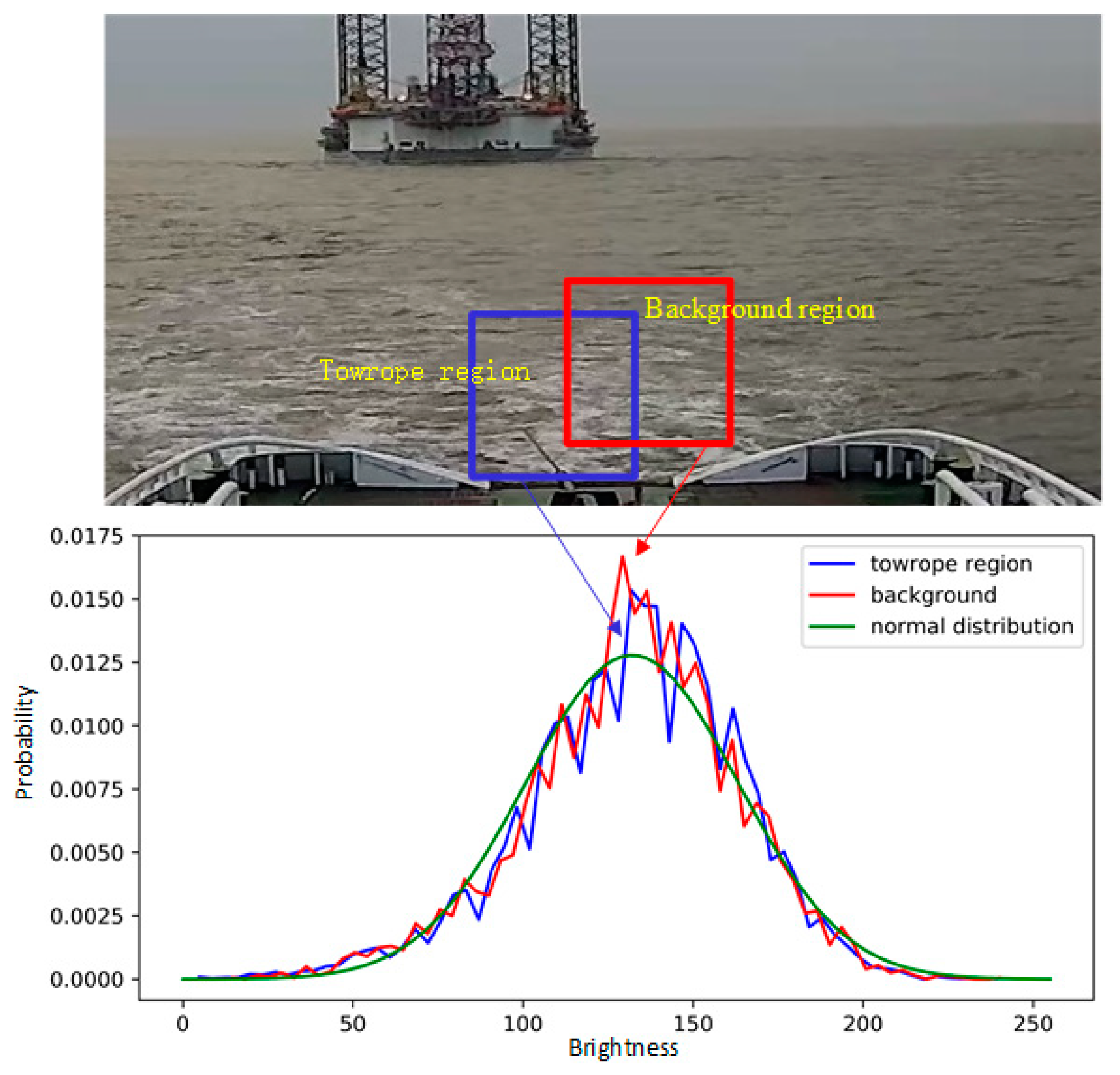
3.3.1. Towing Line Selection
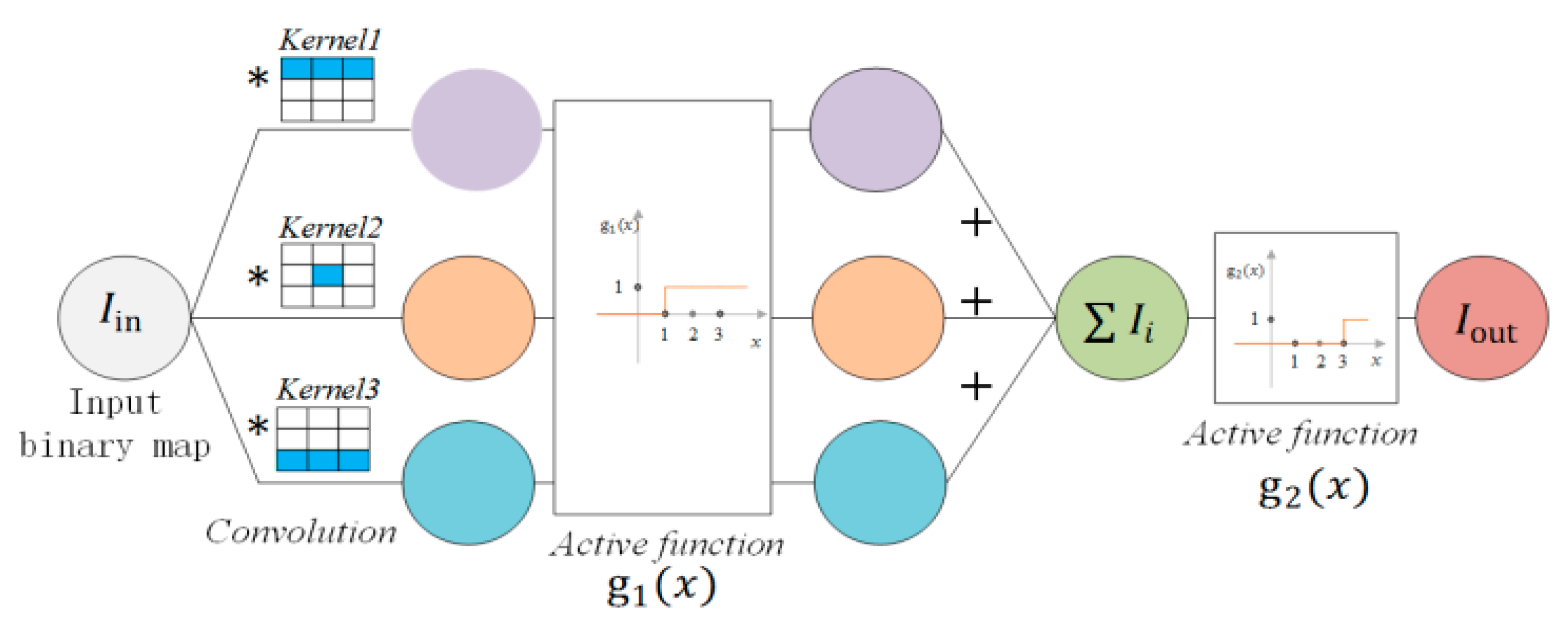
3.3.2. Filtering Horizontal Wave Line Points
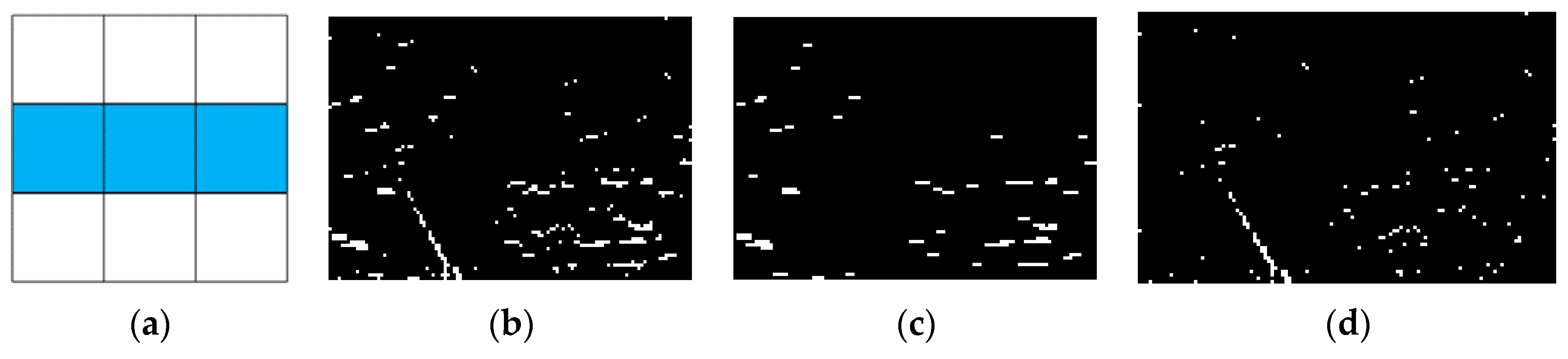
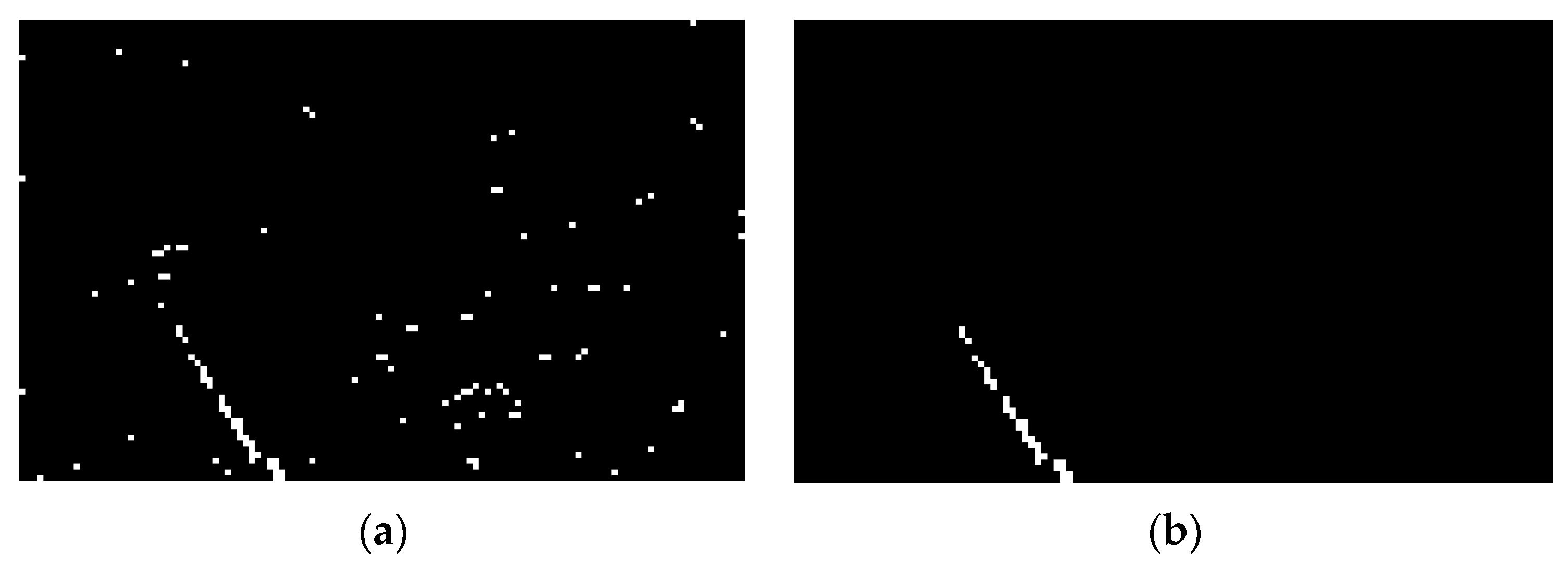
3.3.3. Filtering Discrete Points
3.3.4. Line Parameter Calculation
4. Experiments and Discussion
4.1. Experimental Setup
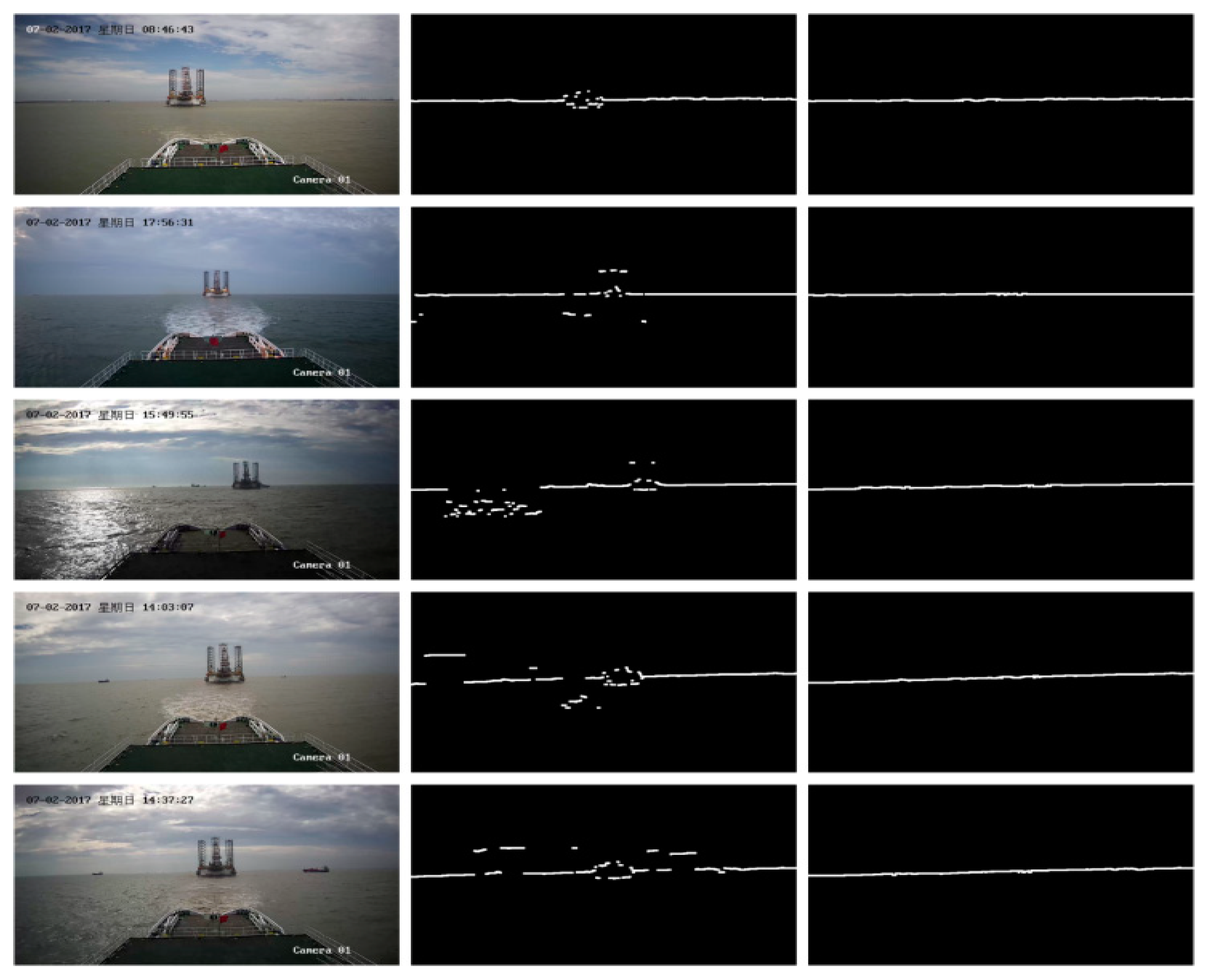
4.2. Water Line Detection
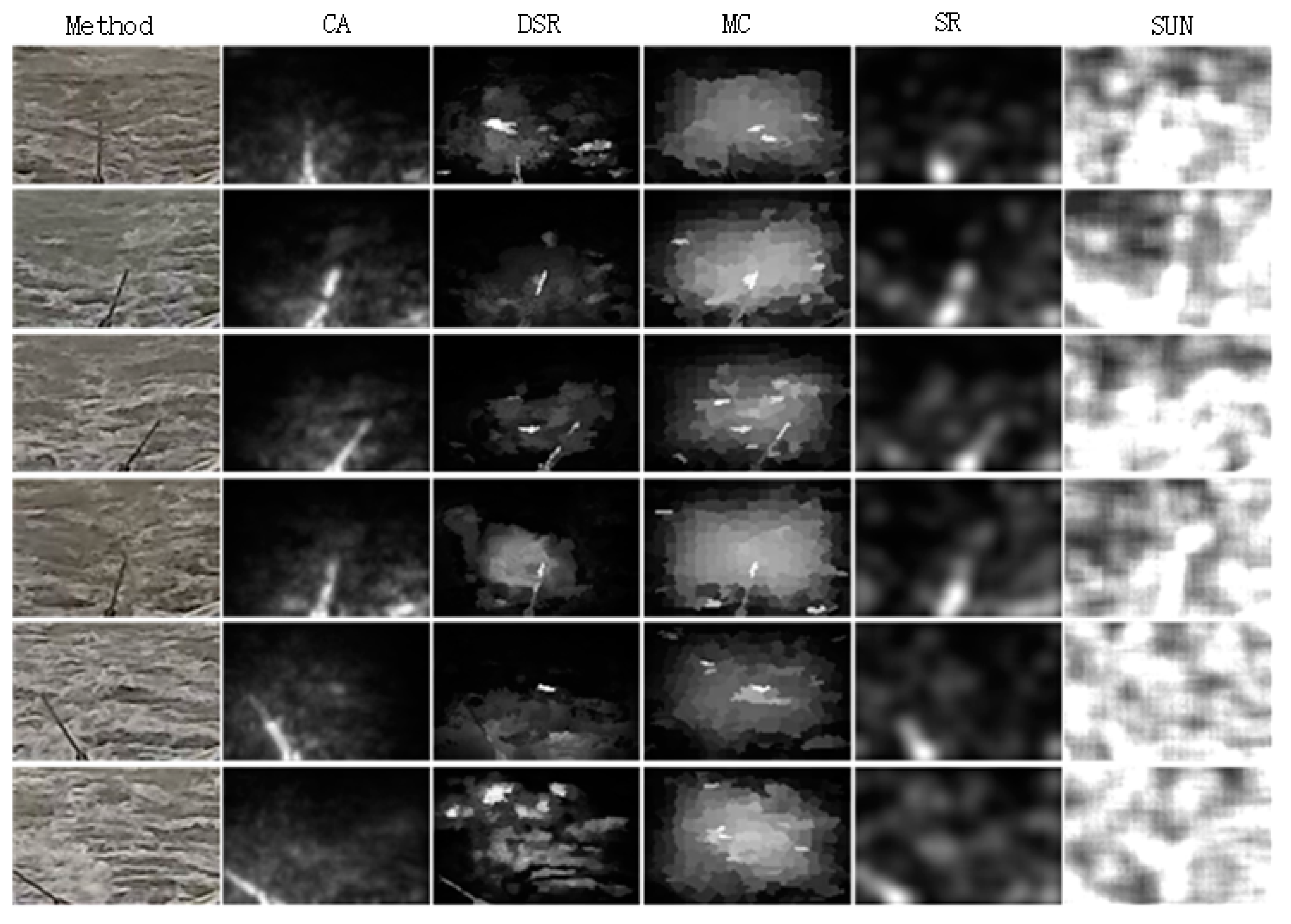
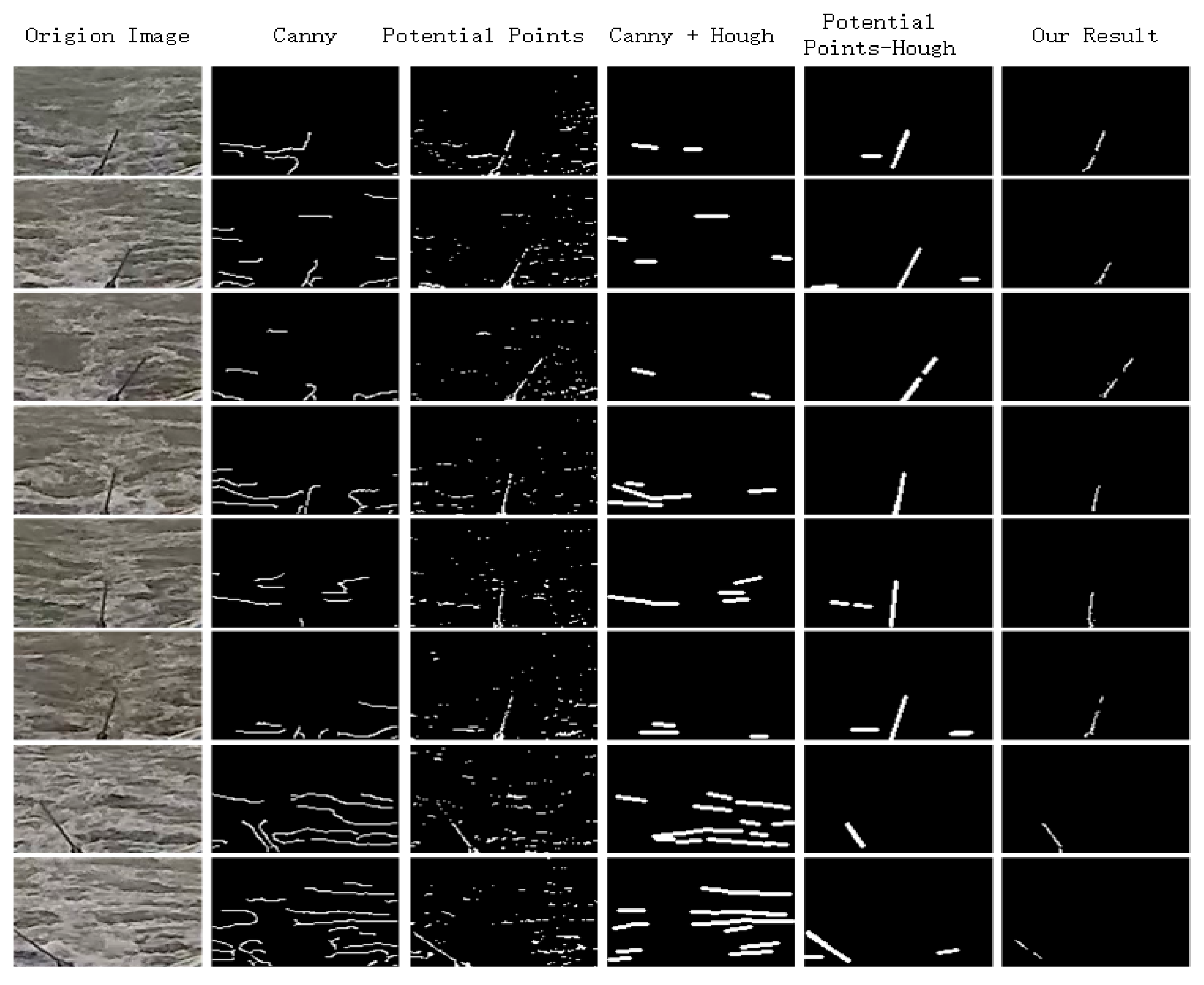
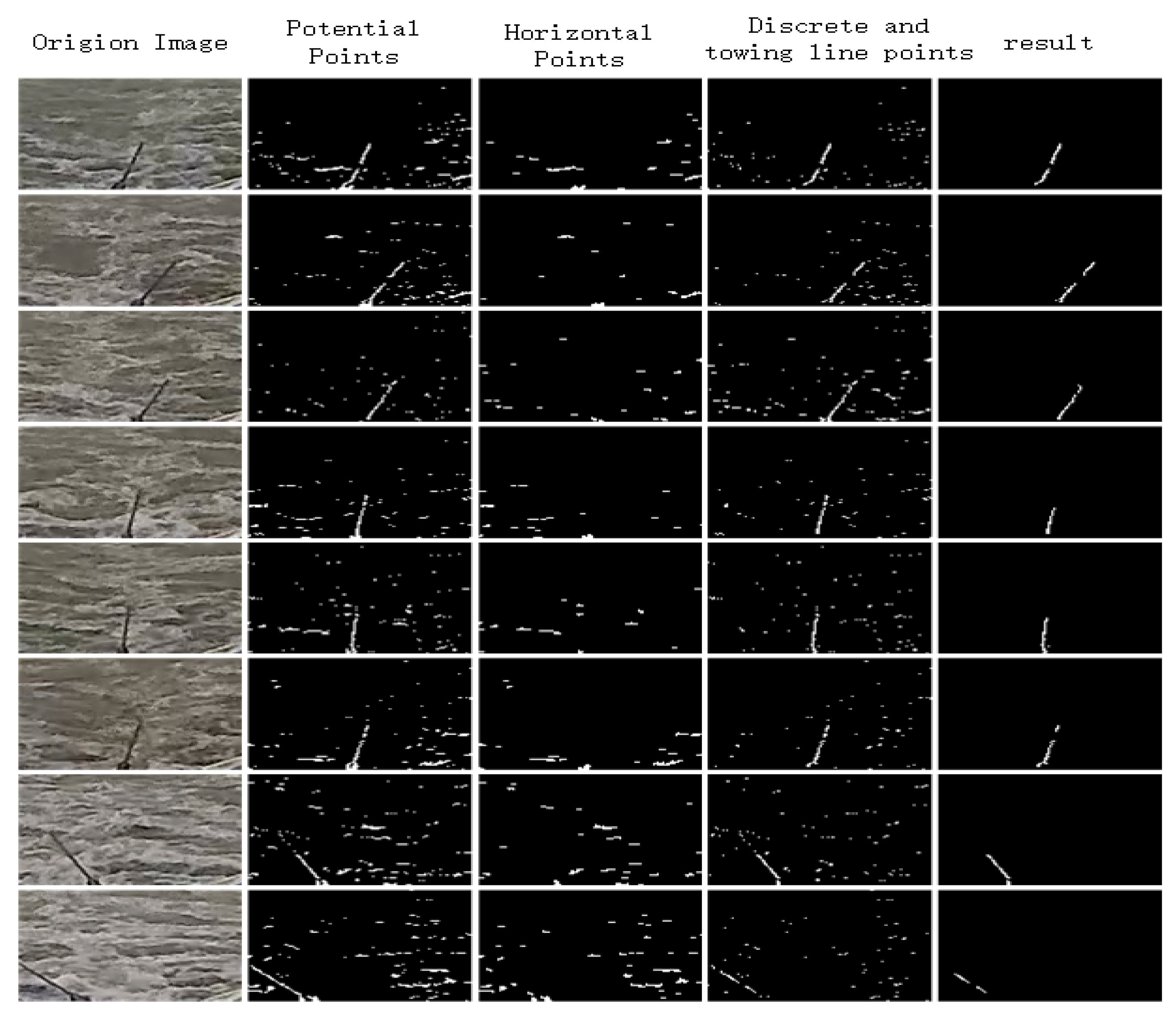
4.3. Towing Line Detection
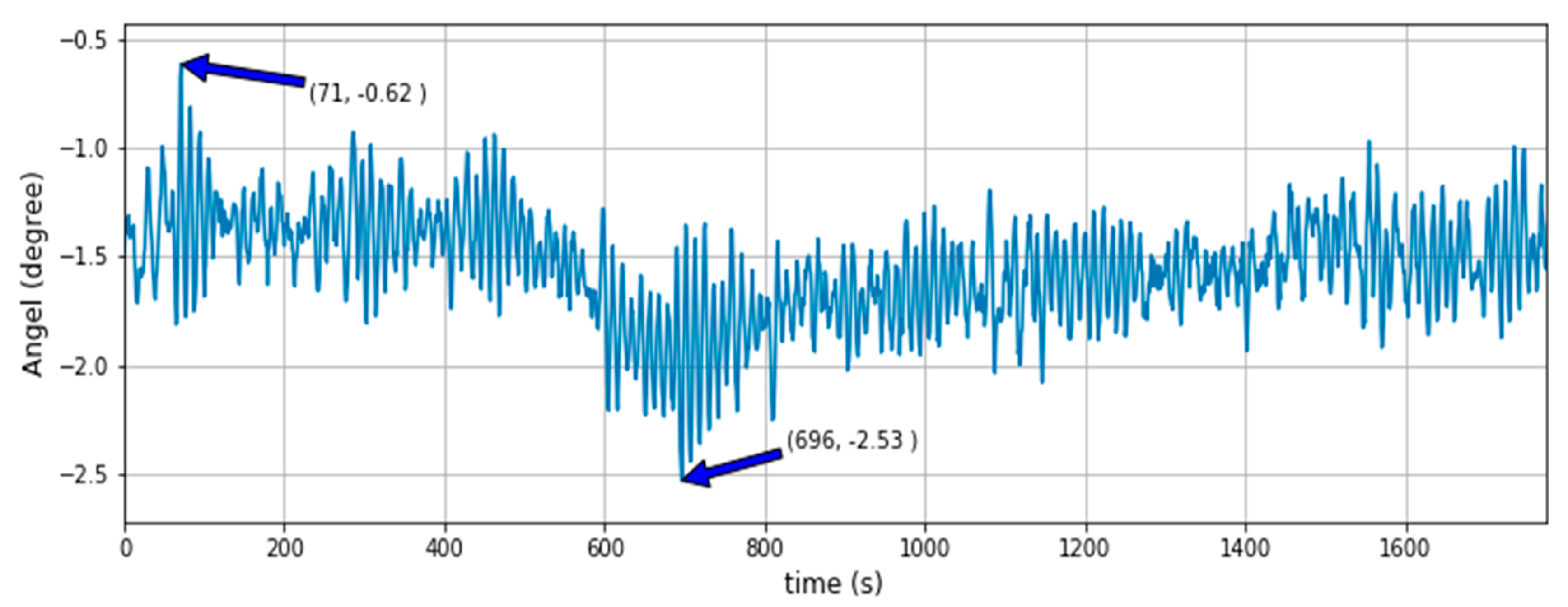
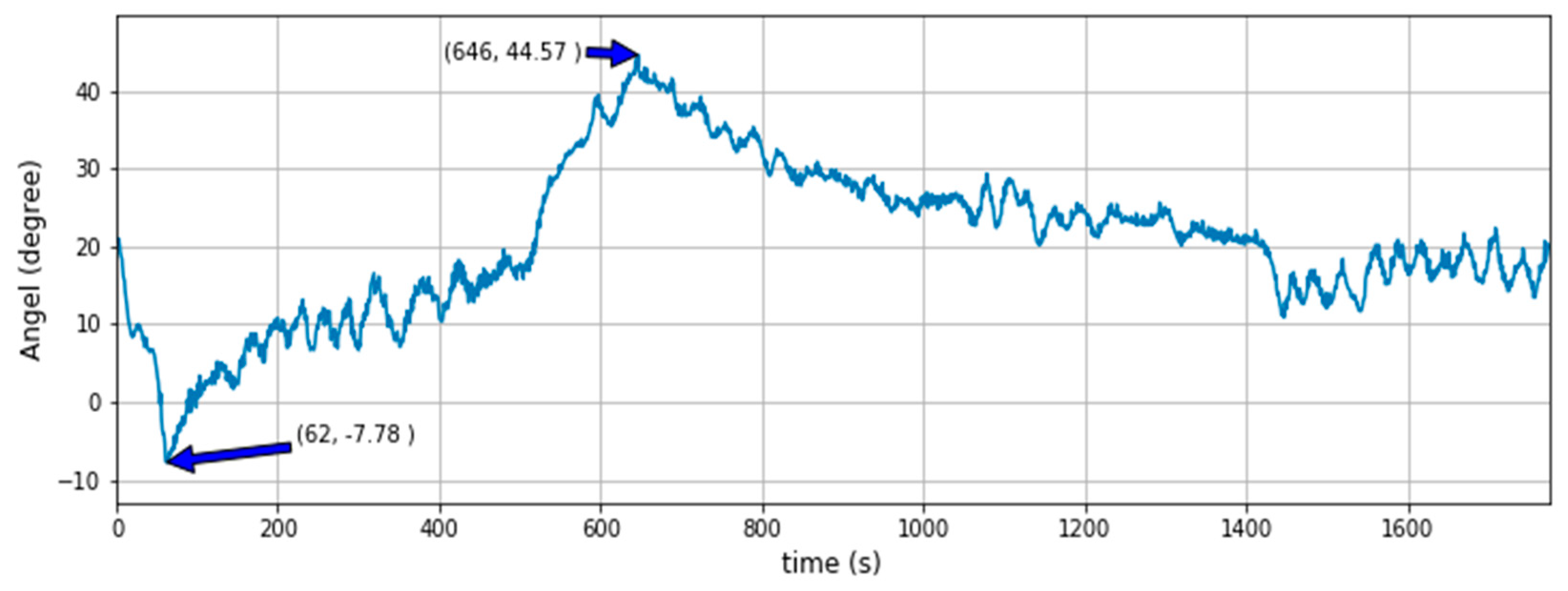
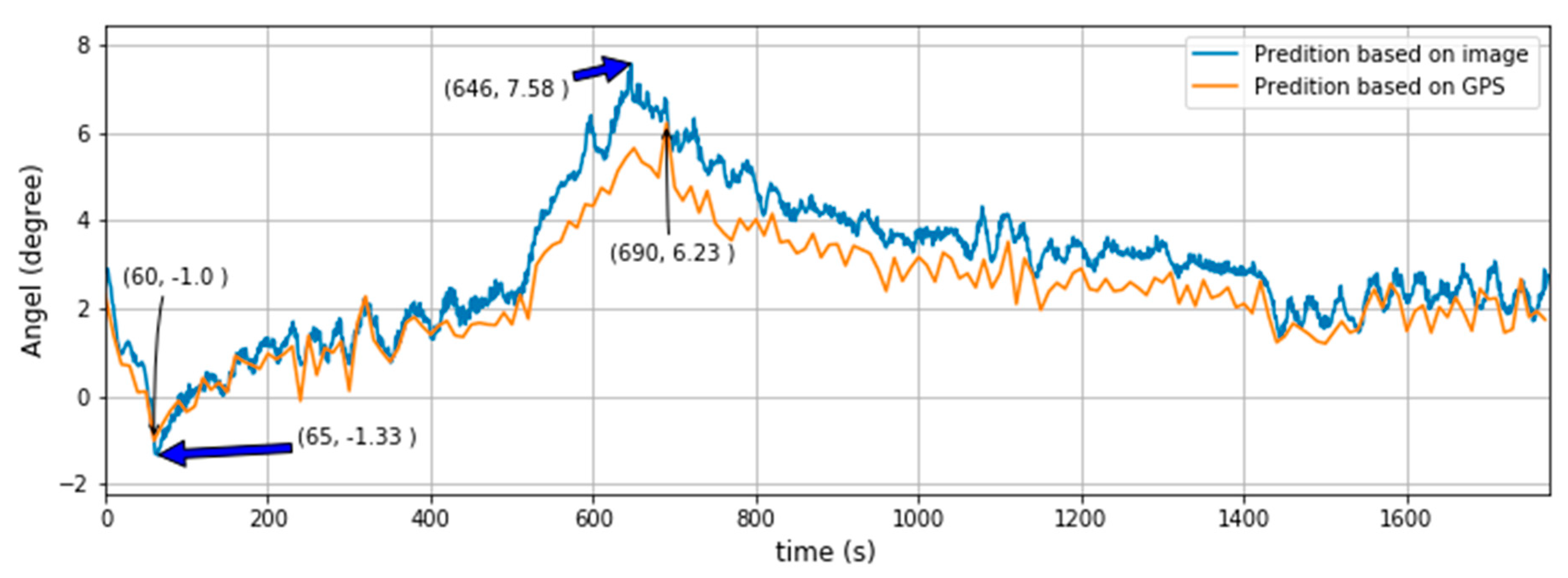
4.4. Towing Line Angle Estimation
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Nam, B.W. Numerical Investigation on Nonlinear Dynamic Responses of a Towed Vessel in Calm Water. J. Mar. Sci. Eng. 2020, 8, 219. [Google Scholar] [CrossRef]
- Fitriadhy, A.; Yasukawa, H.; Maimun, A. Theoretical and experimental analysis of a slack towline motion on tug-towed ship during turning. Ocean Eng. 2015, 99, 95–106. [Google Scholar] [CrossRef]
- Shin, B.S.; Mou, X.; Mou, W. Vision-based navigation of an unmanned surface vehicle with object detection and tracking abilities. Mach. Vis. Appl. 2018, 29, 95–112. [Google Scholar] [CrossRef]
- Strandhagen, A.; Schoenherr, K.; Kobayashi, F. The stability on course of towed ship. Trans. SNAME 1950, 8, 32–46. [Google Scholar]
- Bernitsas, M.; Kekridis, N. Simulation and stability of ship towing. Int. Shipbuild. Prog. 1985, 32, 112–123. [Google Scholar] [CrossRef]
- Bernitsas, M.M.; Kekridis, N.S. Nonlinear Stability Analysis of Ship Towed by Elastic Rope. J. Ship Res. 1986, 30, 136–146. [Google Scholar]
- Bernitsas, M.M.; Chung, J.S. Nonlinear stability and simulation of two-line ship towing and mooring. Appl. Ocean Res. 1990, 12, 77–92. [Google Scholar] [CrossRef]
- Hong, B.; Li, Q.; Gao, X.; Lv, W. A Simulation Study of Towing System Slewing Situation. Navig. China 2009, 32, 106–111. [Google Scholar]
- Fitriadhy, A.; Yasukawa, H.; Koh, K.K. Course stability of a ship towing system in wind. Ocean Eng. 2013, 64, 135–145. [Google Scholar] [CrossRef]
- Fang, M.C.; Ju, J.H. The Dynamic Simulations of the Ship Towing System in Random Waves. Mar. Technol. Sname News 2009, 46, 107–115. [Google Scholar]
- Li, W.; Gao, Q. Analysis of the Relationship between the Towing Slew Angle and Cable Stress. Open J. Transp. Technol. 2017, 6, 153–158. [Google Scholar] [CrossRef]
- Liang, D.; Zhang, W.; Huang, Q. Robust sea-sky-line detection for complex sea background. In Proceedings of the 2015 IEEE International Conference on Progress in Informatics and Computing (PIC), Nanjing, China, 18–20 December 2015; pp. 317–321. [Google Scholar]
- Wang, B.; Su, Y.M.; Wan, L. A sea-sky line detection method for unmanned surface vehicles based on gradient saliency. Sensors 2016, 16, 543. [Google Scholar] [CrossRef]
- Jeong, C.Y.; Yang, H.S.; Moon, K.D. Horizon detection in maritime images using scene parsing network. Electron. Lett. 2018, 54, 760–762. [Google Scholar] [CrossRef]
- Jeong, C.Y.; Yang, H.S.; Moon, K.D. A novel approach for detecting the horizon using a convolutional neural network and multi-scale edge detection. Multidimens. Syst. Signal. Process. 2019, 30, 1187–1204. [Google Scholar] [CrossRef]
- Dai, Y.; Liu, B.; Li, L.; Jin, J.; Sun, W.; Shao, F. Sea-sky-line detection based on local Otsu segmentation and Hough transform. Opto Electron. Eng. 2018, 45, 180039. [Google Scholar]
- Sun, Y.; Fu, L. Coarse-Fine-Stitched: A Robust Maritime Horizon Line Detection Method for Unmanned Surface Vehicle Applications. Sensors 2018, 18, 2825. [Google Scholar] [CrossRef] [PubMed]
- Zhan, W.J.; Xiao, C.S.; Yuan, H.W. Effective waterline detection for unmanned surface vehicles in inland water. In Proceedings of the 2017 Seventh International Conference on Image Processing Theory, Tools and Applications (IPTA), Montreal, QC, Canada, 28 November–1 December 2017. [Google Scholar]
- Zhan, W.J.; Xiao, C.S.; Wen, Y.Q. Autonomous visual perception for unmanned surface vehicle navigation in an unknown environment. Sensors 2019, 19, 2216. [Google Scholar] [CrossRef] [PubMed]
- Hou, X.; Harel, J.; Koch, C. Image signature: Highlighting sparse salient regions. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 194–201. [Google Scholar]
- Jiang, H.; Wang, J.; Yuan, Z.; Liu, T.; Zheng, N.; Li, S. Automatic salient object segmentation based on context and shape prior. Br. Mach. Vis. Conf. BMVC 2011, 6, 9. [Google Scholar]
- Cheng, M.M.; Mitra, N.J.; Huang, X.; Torr, P.H.S.; Hu, S.M. Global contrast based salient region detection. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 569–582. [Google Scholar] [CrossRef]
- Yan, Q.; Xu, L.; Shi, J.; Jia, J. Hierarchical saliency detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Portland, OR, USA, 23–28 June 2013; pp. 1155–1162. [Google Scholar]
- Bhattacharya, S.; Venkatsh, K.S.; Gupta, S. Background estimation and motion saliency detection using total variation-based video decomposition. Signal Image Video Process. 2017, 11, 113–121. [Google Scholar] [CrossRef]
- Ishikura, K.; Kurita, N.; Chandler, D.M.; Ohashi, G. Saliency detection based on multiscale extrema of local perceptual color differences. IEEE Trans. Image Process. 2017, 27, 703–717. [Google Scholar] [CrossRef] [PubMed]
- Chen, C.; Li, S.; Qin, H.; Pan, Z.; Yang, G. Bilevel Feature Learning for Video Saliency Detection. IEEE Trans. Multimed. 2018, 20, 3324–3336. [Google Scholar] [CrossRef]
- Mai, L.; Niu, Y.; Liu, F. Saliency aggregation: A data-driven approach. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Portland, OR, USA, 23–28 June 2013; pp. 1131–1138. [Google Scholar]
- Jiang, H.; Wang, J.; Yuan, Z.; Zheng, N.; Li, S. Salient object detection: A discriminative regional feature integration approach. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Portland, OR, USA, 23–28 June 2013; pp. 2083–2090. [Google Scholar]
- He, S.; Lau, R.W.; Liu, W.; Huang, Z.; Yang, Q. Supercnn: A superpixelwise convolutional neural network for salient object detection. Int. J. Comput. Vis. 2015, 115, 330–344. [Google Scholar] [CrossRef]
- Li, H.; Chen, J.; Lu, H.; Chi, Z. CNN for saliency detection with low-level feature integration. Neurocomputing 2017, 226, 212–220. [Google Scholar] [CrossRef]
- Luo, Z.; Mishra, A.; Achkar, A.; Eichel, J.; Li, S.; Jodoin, P.-M. Non-local deep features for salient object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 6609–6617. [Google Scholar]
- Wang, T.; Zhang, L.; Wang, S.; Lu, H.; Yang, G.; Ruan, X.; Borji, A. Detect globally, refine locally: A novel approach to saliency detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 3127–3135. [Google Scholar]
- Hartley, R.; Zisserman, A. Multiple View Geometry in Computer Vision. Kybernetes 2008, 30, 1865–1872. [Google Scholar]
- Xu, L.; Yan, Q.; Xia, Y.; Jia, J. Structure extraction from texture via relative total variation. ACM Trans. Graph. (TOG) 2012, 31, 1–10. [Google Scholar] [CrossRef]
- Fischler, M.A. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartgraphy. Comm. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Goferman, S.; Zelnik-Manor, L.; Tal, A. Context-aware saliency detection. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 34, 1915–1926. [Google Scholar] [CrossRef]
- Li, X.; Lu, H.; Zhang, L.; Ruan, X. Saliency detection via dense and sparse reconstruction. In Proceedings of the IEEE International Conference on Computer Vision, Sydney, Australia, 1–8 December 2013; pp. 2976–2983. [Google Scholar]
- Jiang, B.; Zhang, L.; Lu, H.; Yang, C.; Yang, M.H. Saliency detection via absorbing markov chain. In Proceedings of the IEEE International Conference on Computer Vision, Sydney, Australia, 1–8 December 2013; pp. 1665–1672. [Google Scholar]
- Hou, X.; Zhang, L. Saliency Detection: A Spectral Residual Approach. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Minneapolis, MN, USA, 17–22 June 2007; pp. 1–8. [Google Scholar]
- Zhang, L.; Tong, M.H.; Marks, T.K.; Shan, H.; Cottrell, G.W. SUN: A Bayesian framework for saliency using natural statistics. J. Vis. 2008, 8, 32. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ship Type | Built | Draught | Length | Width | Gross Tonnage |
|---|---|---|---|---|---|
| Search and Rescue Vessel | 2012 | 6 m | 117 m | 16 m | 4747 t |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zou, X.; Zhan, W.; Xiao, C.; Zhou, C.; Chen, Q.; Yang, T.; Liu, X. A Novel Vision-Based Towing Angle Estimation for Maritime Towing Operations. J. Mar. Sci. Eng. 2020, 8, 356. https://doi.org/10.3390/jmse8050356
Zou X, Zhan W, Xiao C, Zhou C, Chen Q, Yang T, Liu X. A Novel Vision-Based Towing Angle Estimation for Maritime Towing Operations. Journal of Marine Science and Engineering. 2020; 8(5):356. https://doi.org/10.3390/jmse8050356
Chicago/Turabian StyleZou, Xiong, Wenqiang Zhan, Changshi Xiao, Chunhui Zhou, Qianqian Chen, Tiantian Yang, and Xin Liu. 2020. "A Novel Vision-Based Towing Angle Estimation for Maritime Towing Operations" Journal of Marine Science and Engineering 8, no. 5: 356. https://doi.org/10.3390/jmse8050356
APA StyleZou, X., Zhan, W., Xiao, C., Zhou, C., Chen, Q., Yang, T., & Liu, X. (2020). A Novel Vision-Based Towing Angle Estimation for Maritime Towing Operations. Journal of Marine Science and Engineering, 8(5), 356. https://doi.org/10.3390/jmse8050356