Abstract
This study leveraged the millimeter wireless access in vehicular environments (mmWAVE) communication technology to reflect the maneuvering characteristics of small fishing vessels and constructed a collision prevention algorithm that can be applied relatively easily. The algorithm was verified through simulation and actual ship experiments. The algorithm had four components: detection of vessels within three miles; identification of dangerous vessels by applying the time to the closest point of approach (TCPA) and distance at the closest point of approach (DCPA) criteria; continuous monitoring of maritime traffic risk; and incremental alarm signaling. The simulations and experiments confirmed that the alarm was generated incrementally in accordance with the distance to a dangerous situation, with no false alarms. Thus, the proposed algorithm offers potential to enhance the safety of small fishing vessels.
1. Introduction
Commercial fishing is one of the most hazardous occupations today, with injury and fatality rates widely documented in the literature [1]. In Japan, fishing vessel accidents accounted for 34.5% of marine accidents in 2017 [2], and in Korea, 67.8% of marine accidents in 2018 involved fishing boats [3].
Morel and Chauvin [4] conducted a case-by-case analysis of fishing vessel collisions and found that the two main contributors were undetected signals and erroneous diagnoses that can be caused by neglect of sight. Many fishing vessels cannot afford a specific officer of the watch, and therefore the captain or navigator usually takes on this duty in addition to their other duties. In this context, the availability of effective electronic aid to support watch-keeping is crucial for vessel safety, and today’s fishing vessels are often outfitted with various types of navigational equipment, including automatic identification system (AIS) [5]. Although AISs help vessels to avoid collisions [6], the update rate of the dynamic information provided by the AIS ranges from 2 s to 3 min depending on the ship’s speed or situation [7], which may not be sufficient to track the movement of a small fishing vessel with good maneuverability. In addition, relatively fast fishing vessels have difficulty maintaining a course because of their large yaw movements [8], which cause standard deviations from the course of 50–100° and hinder accurate risk predictions [9].
In a study targeting collision prevention for fishing vessels, Lee [10] proposed an ultrasonic alarm system that uses ultrasonic pulses to detect nearby vessels and emits an audio alarm signal when a ship is detected within 50 m. In another approach, Lee et al. [11] suggested that calculating the time to the closest point of approach (TCPA) and the distance at the closest point of approach (DCPA) based on the location information from mobile phones could help to prevent collisions. Seo et al. [12] developed a system that supports safe navigation, in which a server collects both smartphone location and AIS information and issues a warning if another vessel approaches within 500 m, in accordance with the guidelines of Japan’s Ministry of Land, Infrastructure, Transport and Tourism. However, these few collision prevention studies tailored to fishing vessels have limitations because accurate risk predictions cannot be made using only the distance or DCPA and TCPA owing to the large course deviations in these vessels. Various tools and methods to assess the collision risks in larger vessels have been proposed [13]. Recent studies on this topic are generally based on a collision probability model that assesses the potential collisions between large merchant ships, first presented by Macduff [14] and Fujii et al. [15]. Three of these studies can be considered representative of the range of works. Mou et al. [16] developed a linear regression model that used AIS data collected for collision avoidance in the busy waterways to identify correlations between the ship size, speed, and course and DCPA, and proposed a dynamic method based on self-adaptive middleware for wireless sensor networks (SAMSON) to assess the risks. Szlapczynski and Szlapczynska [17] proposed formulas to assess the collision risk based on the ship’s domain, using parameters referred to as the degree of domain violation and the time to domain violation. Zhen et al. [18] presented a framework to construct a collision risk index based on the DCPA and TCPA that could prioritize the collision risks for a large number of vessels by clustering the vessels and modeling the dynamic kinematic relationships between vessels in a cluster.
Importantly, the merchant and fishing vessels have very different maneuvering characteristics, navigational environments, and risk criteria, and the long update rates of AIS limit the applicability of these systems for risk assessments in fishing vessels. Therefore, in this study, we propose a collision prevention algorithm that can be used relatively easily by leveraging a new communication technique, millimeter wireless access in vehicular environments (mmWAVE) communication, to reflect the maneuvering characteristics of small fishing vessels. The proposed approach is verified through simulation and actual ship experiments.
For this purpose, first, the characteristics of mmWAVE communication, the present condition of use in land transportation, and the applicability to the sea were examined. In addition, the algorithm was designed in four steps (ship detection based on mmWAVE communication transmission distance; dangerous vessel identification based on DCPA and TCPA; continuous monitoring based on PARK Model risk value indicating marine traffic risk; alarm based on distance). The constructed algorithm was verified through a computer program-based simulation experiment and actual ship experiment.
2. Application of mmWAVE Communication to Marine Environment
By leveraging wireless communication and traffic control networks in the vehicular environment, mmWAVE communication supports vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communications, thereby supporting improved traffic safety In comparison to existing wireless communication techniques, such as WiFi and 4G, mmWAVE communications use significantly higher carrier frequencies and thus offer a very broad bandwidth, narrow beam, high transmission quality, and strong detection ability. These advantages have attracted increasing attention from both academia and industry [19]. Several major jurisdictions, including the United States, Europe, Japan, and Korea have initiated several projects to investigate and improve the effectiveness of V2X-related technologies, which encompass both V2V and V2I systems, with the aim of improving traffic safety [20]. Research is being actively conducted to apply mmWAVE communication to monitor and improve road traffic conditions. One study suggested a method of using a neighboring vehicle as a relay to deliver a blocked traffic flow signal to overcome the line-of-sight blockage problem [21]. Another study proposed a vehicle-mounted mmWAVE communication device that can communicate while temporarily changing the communication direction via an antenna unit [22]. In the railway field, mmWAVE communication has been introduced in a new Doppler shift estimator for high-speed railways [23] and applied to channel measurement, simulation, and analysis of common urban, rural, and tunnel scenarios, including both straight and curved paths [24].
Even though mmWAVE communication offers the advantages of royalty-free, high-speed, secure, and reliable device-to-device communication, with a transmission rate of 100 ms, its typical communication distance is limited to 500–700 m. Thus, it is difficult to apply this technology at sea [25]. Nonetheless, Kang et al. [25] demonstrated that the WAVE devices mounted on an actual fishing vessel can be used to stably transmit and receive data at distances of up to 8–9 km, demonstrating the technology’s potential in marine applications.
Table 1 compares the characteristics of mmWAVE communication with the AIS equipment typically used for information exchange in ships.

Table 1.
Comparison of characteristics of mm WAVE communication and AIS.
As shown in Table 1, although the maximum transmission distance of mmWAVE communication is much shorter than that of AIS, the AIS transmission period is also very large. To illustrate the impacts of the characteristics presented in the table, Figure 1 plots information on the movement of fishing vessels as received by both AIS and mmWAVE communication.
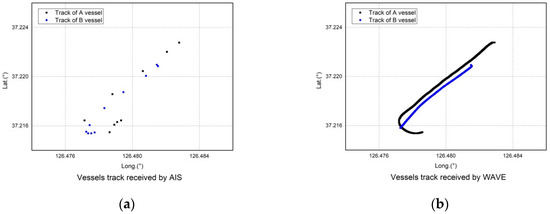
Figure 1.
(a) Vessel track received by AIS; (b) Vessel track received by mm WAVE communication.
The movement of fishing vessels from the data received by mmWAVE communication can be easily detected owing to the short transmission period of the system. Considering the characteristics of small fishing vessels that are going to change rapidly or pass even at a low CPA at a close distance, the collision prevention algorithm was constructed by applying a communication system that can transmit at intervals of 0.1 s. In addition, mmWAVE communication has no communication fee and is economical in mass production. Although the communication distance is short, it is evaluated to have an advantage, especially in small ships because there is no big obstacle in using the coastal voyage [26].
3. Construction of Collision Prevention Algorithm for Fishing Vessels
The collision prevention algorithm consists of ship detection, identification of collision risk, continuous monitoring, and collision warning, as summarized in Figure 2. However, given that a high false alarm rate could be problematic (i.e., operators could show an increasing tendency to ignore alarm signals), the false alarm rate should be optimized in this research. Thus, the standards applied to the collision risk alarm were very conservative to maximize the algorithm’s protective capability.
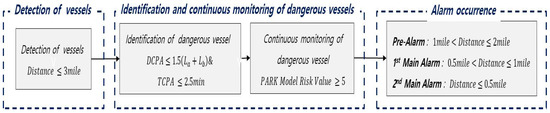
Figure 2.
Schematic of collision prevention algorithm.
To identify the vessels at the risk of collision, we used the DCPA and TCPA as navigational collision risk parameters [13], along with the maritime traffic risk from the PARK model [27].
3.1. Calculation Range Setting
When constructing a collision prevention algorithm, calculating the collision probabilities among all vessels around a fishing vessel requires range setting to limit data collection and processing to meet practical requirements. Park and Lee [28] determined that a large merchant ship at a distance of more than eight miles distant will have a DCPA of more than one mile, and the DCPA will be less than one mile if the ship is within eight miles. In addition, the guidance for collision avoidance of a Hong Kong shipping company Anglo-eastern suggests that although the risk perception and the time and distance required to initiate action can vary in different situations, the maximum distance required to initiate an action is eight miles [29]. However, it is difficult to detect fishing vessels from afar owing to their small size. Additionally, because they exhibit superior maneuvering performance, they do not need to detect vessels from great distances. Furthermore, as mentioned above, the maximum mmWAVE transmission distance at sea is 5–8 km, which is possible only with a very good line-of-sight. Therefore, in this study, the range was set to detect and monitor ships within three miles, considering the mmWAVE transmission distance and the maneuverability of fishing vessels. The plane sailing formula, represented in Equation (1), was used because the distance between the two vessels was within 200–300 miles [30]. Figure 3 is a conceptual diagram to help understand the plane sailing formula for calculating the distance between ships.
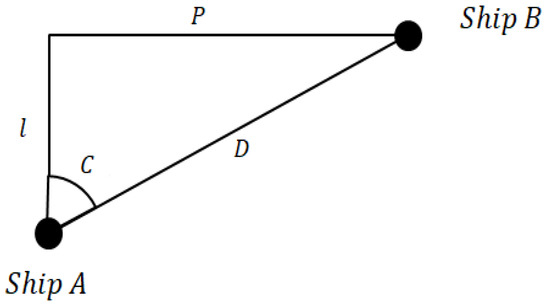
Figure 3.
Conceptual diagram for calculating distance.
Here, D, P, and are the linear, east-west, and north-south distances between the two vessels (all in miles), respectively, and C is the angle between two vessels (°).
3.2. Primary Collision Warning Criteria Setting Based on DCPA and TCPA
DCPA and TCPA criterions were established to detect dangerous vessels. At this time, the primary criterion was set to satisfy both DCPA and TCPA standards. The reason why the ‘and’ condition is used instead of the ‘or’ condition in this study is to detect dangerous vessels that are likely to have close proximity in a short time.
3.2.1. DCPA Criterion Setting
Depending on the location of the WAVE antenna, the ship’s reference point, that is, the location on which the calculation is based, will vary. For example, if the antennae are installed at the sterns of two ships as shown in Figure 4, even if two ships collide in a head-on situation, the distance between the two ships is the distance plus the length of the two ships, not 0 m.
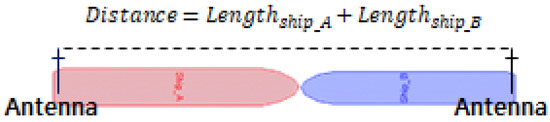
Figure 4.
Distance the antennae of two vessels when the antennae are installed at the stern, where there is a collision even though the computed distance between the two antenna positions is not zero.
Therefore, in this study, the DCPA criterion was set to 1.5 to consider the distance between the two ships as well as their length in collision risk assessment.
3.2.2. TCPA Criterion Setting
To establish the minimum TCPA criteria required to ensure safety, survey data on the maneuverability of small vessels were collected from 19 captains of small fishing vessels operating offshore. The collected data included the normal collision avoidance distance, which means the distance required to avoid a collision, and the average speed of a vessel. Figure 5 shows the results of the survey.
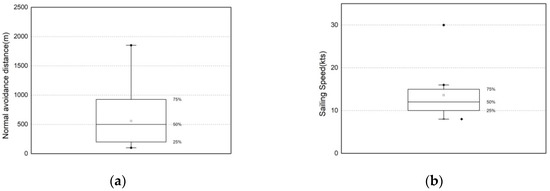
Figure 5.
Box charts of survey responses from 19 captains of ocean-going fishing vessels: (a) normal collision avoidance distance and (b) average speed.
The survey responses for the normal collision avoidance distance ranged from a minimum of 100 m to a maximum of 1852 m, averaging at approximately 564 m, and the vessel speeds ranged from 8.0 to 30.0 knots, and averaged at 13.6 knots.
The minimum distance required to avoid collisions is also determined by the vessel’s turning radius and the maximum distance when hard over [31]. In particular, the longitudinal distance travelled by the hull from the starting point of the turn to the completion of a 90° turn is called the vessel’s advance. Because this distance is the minimum distance traveled in a collision avoidance action, this study sets the TCPA based on this distance. Table 2 lists the parameter values affecting the turning capacity (advance, transfer, tactical diameter) from small vessels [32].
Table 2.
Maneuvering data for small vessels (LOA = length overall).
In this study, the distance required to avoid collisions was based on both the normal collision avoidance distance from the survey results (564.0 m) and the advance values necessary to maneuver small vehicles during emergency from the literature (111.1 m) [32]. We also applied the average speed of 13.6 knots from the survey results; thus, the TCPA criterion was set to 2.5 min to allow time for the navigator to recognize and grasp the situation. Figure 6 is an illustration to help understand the concepts of DCPA, TCPA, and their calculations.
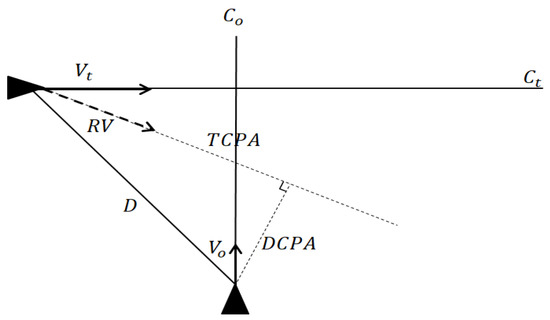
Figure 6.
Illustration to help understand the DCPA, TCPA concepts, and their calculations.
Here, Vt and Vo denote the speeds (knots) of the target and own ships, respectively, Ct and Co are the courses (°) of the target and own ships, respectively, and D is the distance (miles), as shown in Equation (1).
3.3. Secondary Collision Alarm Criteria Setting Based on Maritime Traffic Risk
Owing to the poor course-keeping capacity of small fishing vessels, DCPA and TCPA can change frequently even if the operator does not intentionally change the vessel’s course. This study applied the conservative DCPA and TCPA criteria for initial risk detection. Then, to ensure the algorithm’s reliability under the changing course conditions, alarms were generated based on a secondary risk assessment from the PARK model. The PARK model is a marine traffic risk assessment model based on the characteristics of ship operators and Korean coastal areas, i.e., the ship type, tonnage, length, width, angle, and direction to which other ships approach, port, and voyage, speed difference between ships, and the distance between ships are considered along with the operator’s career, rank, and license [27]. In relation to the PARK Model, an information document was submitted to the sub-committee of Navigation Communication and Search and Rescue in 2015 [33] and the model was presented by Italian researchers at Committee International Radio-Maritime, an annual general meeting in 2015 [34]. In addition, the model can contribute to the development of navigation, vessel traffic, and decision support systems to prevent collisions and identify evacuation routes in emergencies [35].
The PARK model calculates the risk value as follows.
| : | Ship type factor | : | Ton factor | : | Length factor |
| : | Width factor | : | Career factor | : | License factor |
| : | Position factor | : | Target ship LOA | : | Crossing factor |
| : | Side factor | : | In/out harbor factor | : | Speed factor |
| : | Speed difference | : | Distance |
The PARK model risk value ranges from 0 to 7. Risks are divided into four stages: 0–4 as Negligible, 4–5 as Marginal, 5–6 as Critical, and 6–7 as Catastrophic. Therefore, a value of 5 or higher is considered as a collision risk [27]. Therefore, after first detecting a dangerous vessel using the DCPA and TCPA, the algorithm can be improved by generating an alarm when the PARK model risk is 5 or more.
3.4. Final Algorithm Configuration
To maximize its impact, the algorithm establishes three alarm stages according to the distance between the vessels: Pre-Alarm, Main 1st Alarm, and Main 2nd Alarm. Figure 7 shows the flow chart for the final algorithm.
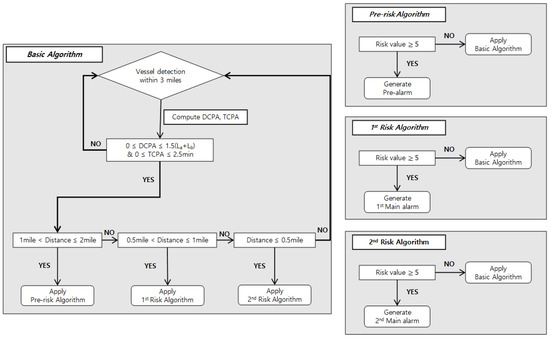
Figure 7.
Flow chart of collision prevention algorithm for small fishing vessels.
4. Verification of Collision Prevention Algorithm
4.1. Verification Through Simulation
4.1.1. Simulation Overview
To verify the constructed algorithm, simulation experiments were performed based on Microsoft Excel and MATLAB 2015b. The scenario was designed to reflect the traffic conditions such as head-on, crossing, and overtaking, as classified by COLREG, which is an internationally applicable traffic law. The simulated vessels were approximately 15 m long, and the vessel encounters occurred at an increment of 45° each from 0–360°, at approaching speeds of 5, 10, 15, and 20 knots for a total of 32 scenarios, as summarized in Table 3. While the fishing vessels can typically travel at speeds ranging from 0 to 30 knots, their common speeds are in the range of approximately 5 to 20 knots.
Table 3.
Overview of simulation scenarios.
4.1.2. Simulation Results
Figure 8 shows simulation results for the distances between the two vessels at which the alarms were generated, for each approach speed and approach angle.
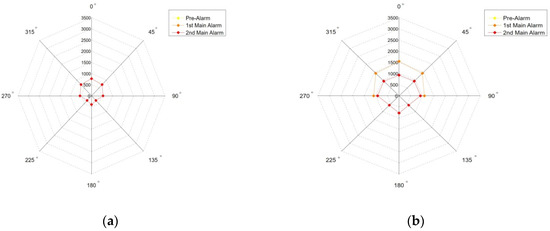
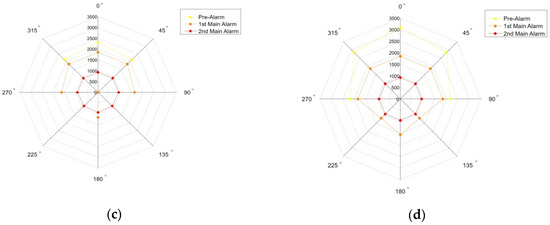
Figure 8.
Distance between two vessels at which the alarms are generated for approach speeds of (a) 5 knots, (b) 10 knots, (c) 15 knots, and (d) 20 knots.
Different types of alarms were generated depending on the speed of the vessel. Consequently, when the ship speed was slow, only the 1st or 2nd Main Alarms were generated at close distances owing to the more extended approach time. When the ship speed was high, the approach time was short, and the Pre-Alarm occurred at a long distance. The approach angle of 0° triggered the alarms at the greatest distances, from a maximum of 3085.44 m to a minimum of 770.43 m, depending on the approach speed. The approach angles of 135° and 225°, from the rear left and right sides, allowed the shortest distances before triggering the alarms, from a maximum of 1180.85 m to a minimum of 295.79 m, respectively.
4.2. Verification Through Actual Ship Experiment
4.2.1. Actual Ship Experiment Overview
Because the actual ship navigation environment is different from the simulation environment, the constructed algorithm was verified through actual ship experiments. The experiment was performed in the waters near Yeongheung-do, Incheon, Korea on March 13, 2019, at 09:00~12:00; the weather was clear, the wind direction was WNW, and the wind speed was approximately 6.8 m/s, which corresponds to the Beaufort scale 4 [36]. In addition, the target ships were two fishing vessels of 9.77 tons each, both shown in Figure 9; the length of the ship A was 16.4 m, and that of ship B was 13.3 m. Figure 10 shows the photographs of the experimental approach and the system screen at the time of the experiment.
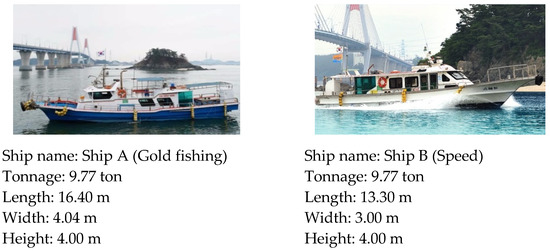
Figure 9.
Photos and specifications of experimental vessels.
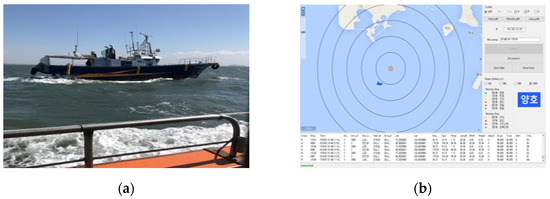
Figure 10.
(a) Photo of approaching vessel at the time of the experiment; (b) system screen at the time of the experiment.
As shown in Table 4, the actual ship experiment scenarios approximated five approach angles: 0°, 45°, 90°, 135°, and 180°, the last of which was considered a quick-turnover after overtaking. However, the maritime conditions caused the actual respective encounter angles to be 6°, 34°, 51°, 151°, and 176°, respectively.
Table 4.
Maneuvering data for small vessels.
4.2.2. Experimental Results
In the experiments, the changes in the distance between the two vessels, the course change of Ship A, the change in DCPA and TCPA and those in the PARK model risk value, and the alarms generated along the ships’ tracks were analyzed.
Figure 11 shows the experimental results for Scenario 2, the 45° crossing situation.

Figure 11.
(a) Experimental results; (b) track and alarm analysis for .
As demonstrated in Figure 11, the experiment was conducted for approximately 260 s, with an initial distance of 3387.4 m between the vessels, approaching nearly 119.4 m. During the approach, which was essentially head-on at an average approach angle of 6°, the course of Ship A maintained an average angle of 217.0°. However, even though the course was not intentionally changed, a change of approximately ±12° occurred in the course, resulting in a DCPA spread from 0 to 583.3 m that stabilized at 44.6 m or less after 250 s. In contrast, after approximately 110 s, the PARK model risk value remained greater than 5, indicating a dangerous situation. In this scenario, the Pre-Alarm was generated at approximately 1.1 miles, changing to the 1st Main Alarm at 1 mile to the 2nd Main Alarm at 0.5 mile.
Figure 12 shows the experimental results for Scenario 2, the 45° crossing situation.
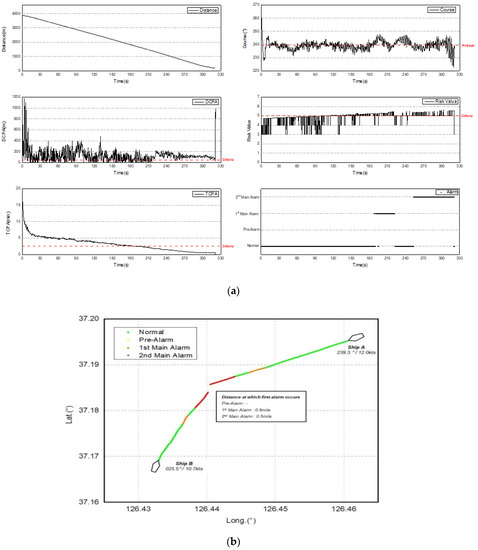
Figure 12.
(a) Experimental results; (b) track and alarm analysis for .
As shown in Figure 12, the experiment lasted for approximately 320 s, with an initial distance of 3874.7 m and approaching nearly 190.9 m. During the approach, which occurred at approximately 34°, the course of Ship A maintained an average angle of 239.3°. However, the course unintentionally changed from a minimum of 222.4° to a maximum of 261.1°, resulting in a DCPA spread varying from 0.1 to 1170.7 m. Thus, in this scenario, the DCPA criterion repeatedly crossed the alarm threshold of 44.6 m. However, the PARK model risk value remained greater than 5 after approximately 250 s, indicating a continuously dangerous situation and resulting in a relatively stable 2nd Main Alarm. In this scenario, the Pre-Alarm did not occur because the DCPA criterion was not met at a distance of more than one mile. The 1st Main Alarm occurred at 0.9 miles, and the 2nd Main Alarm occurred at 0.5 miles.
Figure 13 shows the experimental results for Scenario 3, the 90° crossing situation.
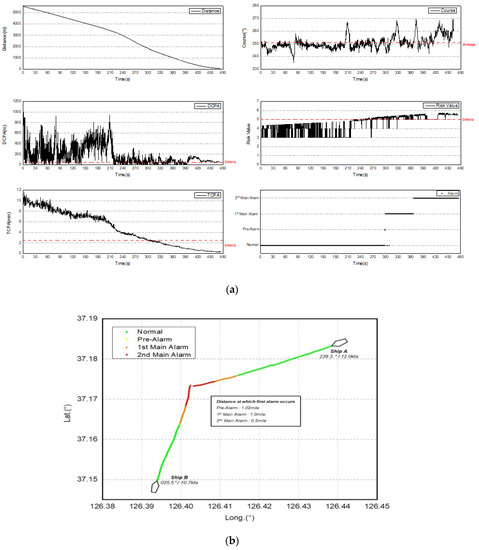
Figure 13.
(a) Experimental results; (b) track and alarm analysis for.
The experiment for Scenario 3 lasted for approximately 470 s and began at an initial distance of 5554.9 m, and approaching nearly 65.5 m. During the approach, which occurred at approximately 51°, the course of Ship A maintained an average angle of 251.1°, varying from 235.5° to 269.7° without intentional course correction and resulting in a DCPA spread varying from 0.2 to 1016.6 m, again repeatedly crossing the DCPA threshold criterion. However, the PARK model risk value remained above 5 after approximately 300 s, indicating a dangerous situation and generating the Pre-Alarm at 1.02 miles, followed by the 1st Main Alarm, and 2nd Main Alarm at appropriate intervals.
Figure 14 shows the experimental results for Scenario 4, the 135° crossing situation.
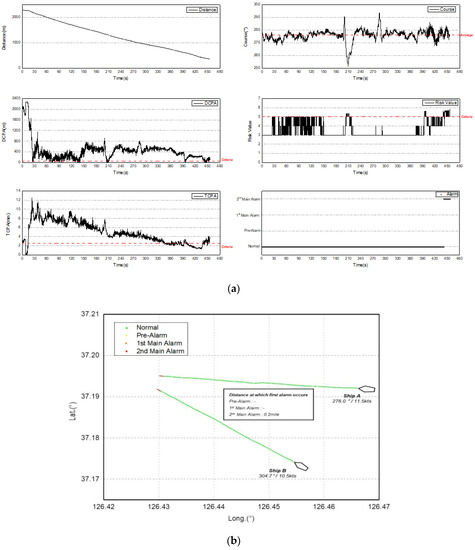
Figure 14.
(a) Experimental results; (b) track and alarm analysis for.
The experiment for Scenario 4 lasted for approximately 460 s, with an initial distance of 2304.2 m between the two vessels, and approaching nearly 362.9 m. During the approach, which occurred at approximately 151°, the course of Ship A maintained an average angle of 276.0°, with unintentional changes from −17.8° to +24.4° resulting in a DCPA spread varying from 0.2 to 2277.8 m that met the alarm criterion only rarely. However, the PARK model risk value only reached 5 at a distance of 0.2 miles (440 s), which is a very close situation that generated the 2nd Main Alarm with no previous alarm, as observed in the simulation.
Figure 15 shows the experimental results for Scenario 5, in which Ship A overtook Ship B and then quickly turned to face Ship B.
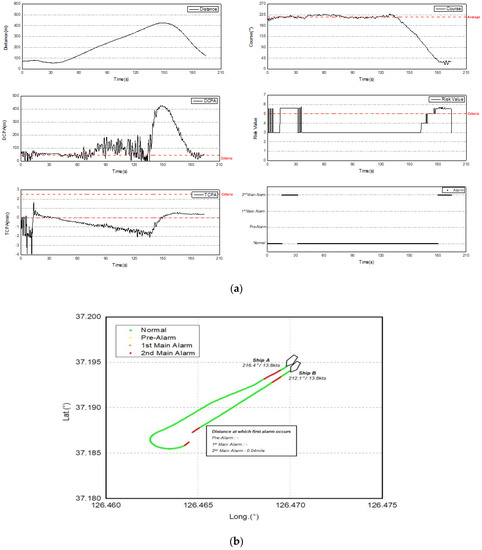
Figure 15.
(a) Experimental results; (b) track and alarm analysis for.
In Scenario 5, the two vessels initially sailed side by side, and then Ship A overtook Ship B and sharply turned to encounter Ship B again. The experiment lasted approximately 200 s. The two vessels sailed side by side for approximately 70.0 m, and as Ship A overtook Ship B, the distance between the two reached 418.7 m before Ship A turned sharply and approached Ship B until the two vessels were separated by only 121.8 m. The average course of Ship A was maintained at 216.4° before the quick-turnover, but the course unintentionally changed from a minimum of 199.5° to a maximum of 228.0°, resulting in a DCPA spread varying from 0.5 to 201.5 m. However, during overtaking, the 2nd Main Alarm was continuously generated because the distance between the vessels was 0.04 miles and the PARK model risk value remained above 5. After overtaking, the alarm was released when the risk value fell below 3 and the TCPA was negative. After the quick turnover, the DCPA repeatedly crossed the alarming threshold as the two vessels approached again. However, the PARK model risk value remained above 5, thereby generating the 2nd Main Alarm at a distance of approximately 0.12 miles.
5. Conclusions
This study aimed to construct a collision prevention algorithm that considered the navigation environment and risk criteria particular to small fishing vessels by applying mmWAVE communication to reflect their maneuvering characteristics. The proposed algorithm consisted of ship detection, collision risk identification, continuous monitoring, and alarm generation. The algorithm was verified through simulations and actual ship experiments. The rapid transmission rate of mmWAVE communication (100 ms) was leveraged to track the diverse movements of fishing vessels. The algorithms ship detection step searched in a three-mile radius, considering the transmission distance of 8–9 km for mmWAVE communication at sea, and the initial collision risk identification used the DCPA and TCPA thresholds (1.5 and 2.5 min, respectively). The continuous monitoring step used the PARK model with a threshold risk value of 5, and three levels of collision risk alarms were generated.
The simulations confirmed that different alarms would be generated according to the approach angle and speed of the vessel. In addition, the maximum distance that generated an alarm occurred with the approach angle of 0°, which is the head-on situation, and the minimum distance was observed at approach angles of 135° and 225°, from the vessel’s stern to port and starboard. The actual ship experiments confirmed that unintentional course changes occur owing to the yawing of the ship and the DCPA changes accordingly. However, the PARK model risk value represented a relatively stable risk assessment, generating alarms at appropriate intervals with no false alarms (see Appendix A). Future work will include simulations and actual ship experiments that capture complex traffic conditions, and upgrade the algorithm based on expert opinions.
Author Contributions
Conceptualization, Y.-S.P. and M.-K.L.; methodology, M.-K.L.; software, M.-K.L.; validation, Y.-S.P. and M.-K.L.; data curation, M.-K.L.; writing—original draft preparation, M.-K.L.; writing—review and editing, Y.-S.P.; visualization, M.-K.L.; supervision, Y.-S.P.; project administration, Y.-S.P.; funding acquisition, Y.-S.P. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by Ministry of Science and ICT of Korea, grant number 1711080083, Regional R&D Innovation Support Project.
Acknowledgments
The contents of this paper are the results of the research project of the Ministry of Science and ICT of Korea [Project Name: 1711080083, Regional R&D Innovation Support Project].
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A

Figure A1.
Pseudo-code for collision prevention algorithm for small fishing vessels.
References
- Mata-Álvarez-Santullano, F.; Souto-Iglesias, A. Stability, safety and operability of small fishing vessels. Ocean Eng. 2014, 79, 81–91. [Google Scholar] [CrossRef]
- JTSB. JTSB Annual Report 2018; Japan Transport Safety Board: Tokyo, Japan, 2018; pp. 96–97.
- KMST. 2018 Statistical Report; Korean Maritime Safety Tribunal: Sejong, Korea, 2018; pp. 10–12.
- Morel, G.; Chauvin, C. A socio-technical approach of risk management applied to collisions involving fishing vessels. Saf. Sci. 2006, 44, 599–619. [Google Scholar] [CrossRef]
- Mills, S. Watch-keeping on fishing vessels: Can electronic marine system help? J. Navig. 2011, 64, 521–532. [Google Scholar] [CrossRef]
- Hsu, H.Z.; Witt, N.A.; Hooper, J.B.; McDermott, A.P. The AIS-assisted collision avoidance. J. Navig. 2009, 62, 657–670. [Google Scholar] [CrossRef]
- IMO. Adoption on New Amended Performance Standard. Resolut. MSC 1998, 74, 15–16. [Google Scholar]
- Sohn, K.H. Maneuvering performance of high-speed craft under waves. Soc. Nav. Archit. Korea 1995, 32, 36–39. [Google Scholar]
- Lee, J.S. A basic study on the collision risk of VTS considering the operational characteristics of small vessels. In Proceedings of the Korean Institute of Navigation and Port Research Conference, GyoungJu, Korea, 8–9 November 2018; pp. 273–274. [Google Scholar]
- Lee, E.B. A basic study on the development of ultrasonic alert system for preventing collision accident of small ships. J. Res. Inst. Marit. Ind. 2004, 15, 1–7. [Google Scholar]
- Lee, S.J.; Kim, H.S.; Long, Z.J.; Lee, S.K. A study on the Korea marine accidents and the countermeasures. J. Navig. Port Res. 2011, 35, 205–211. [Google Scholar] [CrossRef]
- Seo, A.; Hida, T.; Nishiyama, M.; Nagao, K. Comparison and evaluation on user interface of small ship navigation support system. In Proceedings of the Japan Institute of Navigation 2018, Tokyo, Japan, 8–9 June 2018; pp. 1–4. [Google Scholar]
- Ozturk, U.; Cicek, K. Individual collision risk assessment in ship navigation: A systematic literature review. Ocean Eng. 2019, 180, 130–143. [Google Scholar] [CrossRef]
- Macduff, T. The probability of vessel collisions. Ocean Ind. 1974, 9, 144–148. [Google Scholar]
- Fujii, Y.; Yamanouchi, H.; Mizuki, N. II—The probability of stranding. J. Navig. 1974, 27, 239–243. [Google Scholar] [CrossRef]
- Mou, J.M.; Van Der Tak, C.; Ligteringen, H. Study on collision avoidance in busy waterways by using AIS data. Ocean Eng. 2010, 37, 483–490. [Google Scholar] [CrossRef]
- Szlapczynski, R.; Szlapczynska, J. An analysis of domain-based ship collision risk parameters. Ocean Eng. 2016, 126, 47–56. [Google Scholar] [CrossRef]
- Zhen, R.; Riveiro, M.; Jin, Y. A novel analytic framework of real-time multi-vessel collision risk assessment for maritime traffic surveillance. Ocean Eng. 2017, 145, 492–501. [Google Scholar] [CrossRef]
- Wang, X.; Kong, L.; Kong, F.; Qiu, F.; Xia, M.; Arnon, S.; Chen, G. Millimeter wave communication: A comprehensive survey. IEEE Commun. Surv. Tutor. 2018, 20, 1616–1653. [Google Scholar] [CrossRef]
- Korea Communications Agency. V2X Communications, Emerged as a Key Technology in Intelligent Transport System. Trends Prospect. (Trend Focus) 2014, 73, 42–44. [Google Scholar]
- Fan, B.; Tian, H.; Zhu, S.; Chen, Y.; Zhu, X. Traffic-aware relay vehicle selection in millimeter-wave vehicle-to-vehicle communication. IEEE Wirel. Commun. Le. 2018, 8, 400–403. [Google Scholar] [CrossRef]
- Seii, S.A.I. U.S. Patent No. 10,296,011; Patent and Trademark Office: Washington, DC, USA, 2019. [Google Scholar]
- Zhang, C.; Wang, G.; Jia, M.; He, R.; Zhou, L.; Ai, B. Doppler shift estimation for millimeter-wave communication systems on high-speed railways. IEEE Access 2018, 7, 40454–40462. [Google Scholar] [CrossRef]
- He, D.; Ai, B.; Guan, K.; Zhong, Z.; Hui, B.; Kim, J.; Kim, I. Channel measurement, simulation, and analysis for high-speed railway communications in 5G millimeter-wave band. IEEE Trans. Intell. Transp. Syst. 2017, 19, 3144–3158. [Google Scholar] [CrossRef]
- Kang, W.S.; Joen, S.B.; Kim, Y.D. A study on marine application of wireless access in vehicular environment (WAVE) communication technology. J. Korean Soc. Mar. Envrion. Saf. 2018, 24, 445–450. [Google Scholar] [CrossRef]
- Kang, W.S.; Kim, Y.D.; Lee, M.K.; Park, Y.S. The development of a collision warning system for small-sized vessels using WAVE communication technology. J. Korean Soc. Mar. Envrion. Saf. 2019, 25, 151–158. [Google Scholar] [CrossRef]
- Nguyen, X.T. A Study on the Development of Real Time Supporting System (RTSS) for VTS Officers. Ph.D. Thesis, Korea Maritime and Ocean University, Busan, Korea, 2014. [Google Scholar]
- Park, Y.S.; Lee, Y.S. Development of efficient training material through danger analysis to various encounter types using training ship. J. Navig. Port Res. 2008, 32, 103–108. [Google Scholar] [CrossRef]
- Anglo-Eastern. Guideline for Collision Avoidance; Anglo-Eastern Ship Management: Hongkong, 2010; pp. 1–2. [Google Scholar]
- Yun, Y.J.; Jun, S.H.; Moon, S.B. Terrestrial Navigation; Maritime Book Publishing Department of Korea Maritime and Ocean University: Busan, Korea, 2013. [Google Scholar]
- Inoue, K. Theory and Practice of Ship Handling; MunHyun: Busan, Korea, 2017; pp. 56–70. [Google Scholar]
- Lee, M.K.; Park, Y.S.; Kang, W.S. A study on construction of collision prevention algorithm for small vessel using WAVE communication system. J. Korean Soc. Mar. Environ. Saf. 2019, 25, 1–8. [Google Scholar] [CrossRef]
- IMO. A study on Ship Operator Centered Collision Prevention and Alarm System. Sub-Committee on Navigation 2015, NCRS 2/INF.10; International Maritime Organization: London, UK, 2015. [Google Scholar]
- Aleandri, C. Satellite AIS tracking integrated with a ship collision prevention and alert system. In Proceedings of the CIRM Annual General Meeting 2015, Gibraltar, 3–5 June 2015. [Google Scholar]
- Park, Y.; Park, J.; Shin, D.; Lee, M.; Park, S. Application of potential assessment of risk (PARK) model in Korea waterways. J. Int. Marit. Saf. Environ. Aff. Shipp. 2017, 1, 1–10. [Google Scholar] [CrossRef]
- Weather Information of Korea Meteorological Administration. Available online: http://www.weather.go.kr/mini/marine/marine_integrate.jsp (accessed on 15 March 2019).

© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).