Efficient Nonlinear Hydrodynamic Models for Wave Energy Converter Design—A Scoping Study


Abstract
1. Introduction
1.1. R&D Context for WEC Simulation
1.2. Requirements of WEC Simulation
- (a)
- Fidelity requirement—be reliable for all possible trial vectors that an optimization algorithm might generate for evaluation,
- (b)
- Flexibility requirement—be general enough to be applicable to a wide variety of candidate WEC concepts, and
- (c)
- Computational requirement—be fast/affordable enough to allow sufficient generations or iterations to be completed in practical time scales on available and affordable hardware.
1.3. Objective of Scoping Study
- At the low-fidelity/high-speed end of the spectrum are methods based on LPF, including frequency-domain methods [6], Cummins equation time-domain methods [7], and extensions of Cummins methods, such as the Nonlinear Froude–Krylov (NLFK) approach (see Section 3.6.2).
- At the high-fidelity/low-speed end of the spectrum are approaches based on RANS CFD codes (see review in [8]). Schmitt et al. [9] present the challenges and advantages for the application of RANS-based methods in the design process of a WEC, concluding the major drawback is the significant computational power required.
1.4. Previous Reviews
1.5. Outline
- Section 3 reviews the CFD theories intermediate to RANS and LPF, which simplify the NSEs yet retain the potential to simulate nonlinear WEC hydrodynamics.
- Section 4 reviews the use of Domain Decomposition, which aims to reduce the required computational overhead of high fidelity CFD codes, by simulating the bulk of the computational domain with a lower fidelity model with fast computational speed, while only simulating the area in the immediate vicinity of the WEC with computationally expensive, higher fidelity models.
2. Efficient Nonlinear Hydrodynamic Models for WECs
2.1. Hydrodynamic Nonlinearities—Types
2.1.1. Viscosity
2.1.2. Nonlinear Ocean Waves
2.1.3. Time-Varying Wetted Body Surface
2.2. Hydrodynamic Nonlinearities—Dependences
2.2.1. Device Dependence
2.2.2. Sea State Dependence
2.2.3. Control Dependence
2.2.4. Scale Dependence
2.3. The Navier–Stokes Equations
2.3.1. Solving
- Mesh: A common approach, which is the main focus of the models reviewed in Section 3, discretizes the domain into nodes/cells.
- Particles: Discretizes the domain into lagrangian particles, via methods such as smoothed particle hydrodynamics (SPH) (discussed in Section 4.4).
- Particle distribution field: Discretizes the domain into a field giving a statistical representation of the particle distribution using methods such as Lattice Boltzman (LB) (discussed in Section 4.5).
2.3.2. Methods
2.3.3. A Note on Turbulence
3. Simplifying the Navier–Stokes Solutions
3.1. Simplifications
3.1.1. Simplifying the Equations
- (a)
- Incompressibility: Considering the fluid to be incompressible is a very good assumption for water, resulting in very little loss in accuracy. This provides a major simplification, as the density becomes a known constant, allowing the NSE to be solved as a system of four equations with four unknowns, without the need of including the additional energy equation and equation of state for closure (as discussed in Section 2.3.1). However, one case in wave energy where this does not hold is for OWCs when considering the dynamics of the air chamber. To accurately model the entire OWC system, the compressibility of air is important, requiring thermodynamic considerations, as described in the reviews [58,59] which give a good overview of the modeling of OWC systems. Falco and Henriques [60] explicitly review “the spring-like effect” of the air compressibility in OWC chambers and Lopez et al. [61] and Elhanafi et al. [62] show that neglecting air compressibility may lead to significant errors. However, as the scope of this review pertains to the hydrodynamics of WECs, rather than the thermodynamics, all methods herein consider the assumption of incompressibility.
- (b)
- Inviscid: Setting the viscosity to zero eliminates the stress tensor from the momentum equation, (Equation (2)), yielding the Euler equations, which are reviewed in Section 3.2.
- (c)
- Irrotational: An irrotational flow implies that the velocity can be described as the gradient of a potential, which allows the continuity equation for the velocity to be transformed into Laplace’s equation for the potential. This is termed potential flow (PF), which greatly simplifies the solution to the NSE, as the potential is a scalar value that can be obtained from a single equation, compared to solving for the three components of the velocity vector. PF based methods are reviewed in Section 3.3, Section 3.4, Section 3.5 and Section 3.6.
3.1.2. Simplifying the Boundary Conditions and Computational Domain
- Considering the entire 3D computational domain, whose boundaries change position in time in-line with the evolution of the free surface and WEC body surface, fully nonlinear PF (FNPF) is the most accurate method, but also requires the most computation of the PF methods. FNPF is discussed in Section 3.3.
- Assuming shallow-water conditions, the vertical component of the velocity can be neglected, which reduces the computational domain to 2D, and the various methods applying the shallow-water equations are reviewed in Section 3.4.
- Assuming the scattered (diffracted and radiated) waves are small, the free surface boundary conditions can be linearized on the incident wave elevation, using the weak scatterer method detailed in Section 3.5.1.
- Employing a Taylor series expansion of the free surface and body boundary conditions about their mean positions enables the computational domain to remain static and is the basis of weakly nonlinear PF (WNPF) reviewed in Section 3.5.2.
- Considering the free surface boundary at its means position, but applying the WEC body boundary conditions on the instantaneous wetted surface at each time-step, is the partially nonlinear PF presented in Section 3.6.
- At the extreme end of the simplifications to the NSE, is LPF, which linearizes the free surface and WEC body boundary conditions around their mean positions.
3.2. Euler Equations
3.3. Fully Nonlinear Potential Flow
- Projection methods: such as the boundary element method (BEM), virtual source method or spectral method, that involve projecting the problem onto some portion of the fluid boundary and thereby reducing the computational dimension of the problem by one.
- Field solvers: such as the finite difference method (FDM), finite element method (FEM) and harmonic polynomial cell (HPC) method, that discretize the whole computational domain.
3.3.1. Boundary Element Method
3.3.2. Spectral Methods
3.3.3. Virtual Source Method
3.3.4. Finite Element Method
3.3.5. Spectral Element Method
3.3.6. Finite Differences Method
3.3.7. Hybrid Spectral Method
3.3.8. Harmonic Polynomial Cell Method
3.3.9. FNPF-Summary
3.4. Shallow-Water Equations
3.4.1. Boussinesq Equations
3.4.2. Non-Hydrostatic Flow
3.4.3. Congested Shallow Water
3.5. Weakly Nonlinear Models
3.5.1. Weak-Scatterer
3.5.2. Weakly Nonlinear Potential Flow
3.6. Partially Nonlinear
3.6.1. Time-Varying Parameters
3.6.2. Nonlinear Froude–Krylov
3.7. Including Viscous Effects
3.7.1. Viscous Force Term
3.7.2. Potential Flow
3.7.3. Euler Equations
3.7.4. Domain Decomposition
4. Domain Decomposition Methods
4.1. Wave Model to Potential Flow
4.2. Wave Model to RANS
4.3. Potential Flow to RANS
4.3.1. SWENSE
4.3.2. Grid2Grid
4.3.3. OceanWave3D
4.3.4. qaleFOAM
4.3.5. PVC3D
4.3.6. Others
4.4. Potential Flow to SPH
4.5. Potential Flow to Lattice Boltzman
4.6. Incompressible to Compressible
4.7. Temporal Domain Decomposition
5. Computationally Efficient Modeling Techniques
5.1. Parametric Models Identified From Data
5.1.1. Model Structures
5.1.2. Model Parameterizations
5.1.3. Identification Data
- Scale: NWTs offer the significant advantage of being able to test at full scale. The scaling issue is a major drawback of using PWTs for SID of WEC models, since nonlinear effects may not upscale correctly from PWT to full scale, as discussed in Section 2.2.4 and Section 3.7.1, as well as in Cruz et al. [315]. However, numerically resolving some high fidelity models, such as RANS, at full-scale, can be computationally expensive (see [67]). Therefore, it is vital the SID experiments are designed to provide the maximum information in the minimum time (as discussed in [314]), otherwise NLPF models or domain decomposition techniques may be required for longer duration SID experiments in NWTs at full-scale.
- Reflections: NWTs are superior in eliminating undesired reflections from the tank walls contaminating the SID experiments, with numerical absorption zones able to limit reflections below 1% [316], whereas world-class PWTs can incur reflection coefficients of around 10% [315,317] in the wave propagation direction, and often have no side wall absorption.
- Constraints and restraints: NWTs allow the WEC to be easily constrained to single DoFs, allowing SID of each DoF separately if desired, whereas PWTs require complex mechanical restraints to achieve this task, which introduces friction and alters device dynamics. The same is true for external forces, which can be applied exactly to the WEC in an NWT, but require physical actuators in a PWT which introduce some level of inaccuracy.
- Measurements: NWTs allow non-intrusive measurement of as many variables as desired, with zero measurement noise, without requiring physical measuring devices to be added to the system. Schmitt et al. [9] discuss a significant challenge of PWT experiments is to ensure that the measurement instrumentation is as non-intrusive as possible and does not contaminate any of the results. NWTs also allow easy measurement of some useful variables which are extremely difficult/impossible to measure in a PWT, such as the exact pressure everywhere on the WEC surface, or the fluid velocity and vorticity around the WEC.
- Cost: In the design phase of a WEC development, varying the WEC geometry may be necessary for optimization studies, which can easily be implemented in an NWT through a few lines of code, whereas a physical prototype needs to be manufactured for each geometry tested in a PWT. Schmitt et al. [9] also discuss that a significant investment of resource and money often goes into the design, manufacture, installation, and calibration of specialized pieces of PWT measurement equipment often custom made for a particular WEC design and scale, whereas in an NWT, sensors, actuators, and constraints can be arbitrarily added through a few lines of code. Furthermore, time at a PWT facility can range from hundreds to tens of thousands of euros per day.
- Availability: Testing time in PWT facilities must be organized months in advance and is kept to a tight schedule, whereas with the rise of cloud computing, NWT resources are always available, multiple experiments can be run in parallel and testing time can be increased on the fly.
5.2. Probabilistic Models
5.2.1. Spectral Domain
5.2.2. Polynomial Chaos
5.3. Nonlinear Frequency Domain
6. Discussion
6.1. Applications
6.1.1. WEC Design—Productivity, Loading, and Survival Characterizations in Operational Sea States
- Wave excitation forces are overestimated in all but the smallest waves.
- When body rotations are large there is no justifiable method for determining whether to apply the calculated wave forces in a reference frame that moves with the body or a reference frame that is fixed to the body’s mean position. Neither approach is correct and both approaches result in incorrect results.
- There is no automatic way to enforce the Budal limit [347], this leads to simulation results that are invalid due to unrealistically large amplitudes of motion.
- Because the Budal limit is not enforced estimated performance of designs that would violate this limit is not properly penalized so geometry optimizations that converge on these designs are not reliable. This is a particular problem for objective functions that favor smaller devices (e.g., energy yield per surface area or energy yield per cubic displacement). In the worst instances, this issue leads to convergence on physically meaningless solutions such as WEC devices with zero area/volume/stroke.
6.1.2. WEC Design—Loading and Survival Characterizations in Extreme Sea States
- Simulation length—the creation of statistically derived “design waves” to represent entire sea states in limited time lengths has been a subject of many studies in naval architecture, with detailed literature reviews presented in [351,352]. For example, the NewWave approach is a popular method, which results in a focused wave representing the average shape of the largest wave derived from a given wave spectrum. The usage of NewWaves for RANS simulations of WEC survivability is demonstrated in Ransley et al. [353] and is also employed as the input waves for the blind tests in [125,247] which compare the performance of a range modeling approaches.
- Sea state selection—One common method used to estimate extreme conditions employs environmental contours of extreme conditions, as reviewed in Edwards and Coe [354]. However, it is not always the largest wave that causes the largest load. For example, Harnois et al. [355] use field test measurements to investigate the extreme load analysis of WEC mooring systems and observe that that peak mooring loads do not occur for the sea states on the external contour line of the measured sea states, but for the sea states inside the scatter diagram. This agrees with the finding of Yu et al. [356], who discuss that the extreme wave load does not always occur at the largest wave, but instead, it is often a series of specific wave trains that cause extreme loads due to the resulting combination of the instantaneous WEC position and wave elevation. In addition, Coe and Neary [357] discuss that for different WEC components, the largest load may happen at different wave environments. Therefore, it is essential to develop a systematic approach to identify the critical sea states that are likely to cause an extreme wave load. Such a systematic approach necessitates utilizing a combination of tools, as suggested in the review by Coe and Neary [19] and later demonstrated in Van Rij et al. [358].
6.1.3. Wave Farm Design—Productivity Characterization of a Farm Using Already Very Well Characterized WEC Technology
6.2. Device Type
- Wave activated body/OWC/overtopping device
- Fixed/floating
- Surface piercing/submerged
- Point absorber/larger terminator or attenuator
- Near shore/offshore
- Rigid body/flexible membrane
- Smooth outputs/latching control or end-stop collisions
6.3. Higher-Order Waves
6.4. Open-Source Software
6.5. Hardware
6.5.1. GPUs
6.5.2. A Note on Parallel Processing
6.6. Summary of Methods
7. Conclusions
- A variety of nonlinear PF methods, with increasing levels of complexity, are available or under development. However, a general means of robustly including viscous effects to the PF-based simulations does not appear present and is likely to be important for a broad range of WEC simulation cases.
- A particularly promising approach, gaining increased attention and popularity, is domain decomposition, where lower-fidelity models are used in the bulk of the simulation and are coupled to more computationally expensive high fidelity models that are localized to the domains of interest. In particular, the nesting of RANS models inside of NLPF models, yields a rigorous method of including the effects of viscosity, without incurring the computational overhead of a full RANS simulation.
- Surrogate modeling appears to have good potential, allowing computationally efficient models to be identified which can encapsulate nonlinear behavior with similar fidelity to data they are trained upon.
- The best choice of simulation tool can depend on the particular application or device type, but for most applications, a combination of tools will be most likely required. Although this could potentially put strain on developers/engineers, due to the requirement of purchasing and learning to use multiple tools, a push towards development and sharing of open-source WEC simulation software can be noted throughout the community, which would reduce the aforementioned strain on developers/engineers.
- Although this review focused on simulation methods more computationally efficient than RANS, it can be stated that RANS modelling is still required as an integral part for many of these more efficient simulation methods. For example, to provide system identification data for viscous effects. RANS and other high fidelity models will still need to play an important role and be used for model identification, inner domains for domain decomposition methods, and for extreme/survival testing.
- Judging computational feasibility should be done in line with respect to modern and future computing hardware architecture, with a paradigm shift in high-performance computing to include heterogeneous CPU-multi GPU architectures. Practical run-times may be achievable depending on the computing hardware at hand, investment to a particular method should ensure its ability to leverage such facilities in the future.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| ALE | Arbitrary Lagrangian–Eulerian |
| ANN | Artificial Neural-Network |
| ARX | AutoRegressive with eXongenous inputs |
| BEM | Boundary Element Method |
| CFD | Computational Fluid Dynamics |
| CPU | Central Processing Unit |
| DoF | Degrees of Freedom |
| ECN | Ecole Centrale de Nantes |
| FD | Frequency Domain |
| FDM | Finite Difference Method |
| FEM | Finite Element Method |
| FK | Froude–Krylov |
| FMM | Fast Multipole Method |
| FNPF | Fully Nonlinear Potential Flow |
| FPSO | Floating Production Storage and Offloading |
| FVM | Finite Volume Method |
| GMRES | Generalized Minimal Residual |
| GPU | Graphical Processor Unit |
| HOS | High Order Spectral |
| HPA | Heaving Point Absorber |
| HPC | Harmonic Polynomial Cell |
| KC | Keulegan–Carpenter |
| KGP | Kolmogorov–Gabor Polynomial |
| LB | Lattice Boltzmann |
| LPF | Linear Potential Flow |
| MEL | Mixed Eulerian-Lagrangian |
| NLFD | Nonlinear Frequency Domain |
| NLFK | Nonlinear Froude–Krylov |
| NURBS | Non-Uniform Rational B-Splines |
| NWT | Numerical Wave Tank |
| OSC | Oscillating Surge Converter |
| OWC | Oscillating Water Column |
| PF | Potential Flow |
| PC | Polynomial Chaos |
| PTO | Power Take-Off |
| PWT | Physical Wave Tank |
| QALE | Quasi Arbitrary Lagrangian–Eulerian |
| RANS | Reynolds Averaged Navier–Stokes |
| SD | Spectral Domain |
| SID | System Identification |
| SEM | Spectral Element Method |
| SPH | Smoothed Particle Hydrodynamics |
| SWENSE | Spectral Wave Explicit Navier-Stokes Equations |
| TD | Time Domain |
| TPL | Technology Performance Level |
| TRL | Technology Readiness Level |
| WNPF | Weakly Nonlinear Potential Flow |
| WSA | Weak-Scatterer Approximation |
| WSI | Wave-Structure Interaction |
References
- Weber, J.; Costello, R.; Ringwood, J. WEC technology performance levels (TPLs)-metric for successful development of economic WEC technology. In Proceedings of the Tenth European Wave and Tidal Energy Conference, Aalborg, Denmark, 2–5 September 2013. [Google Scholar]
- Bull, D.L.; Bull, D.L.; Costello, R.P.; Babarit, A.; Kim, N.; Kennedy, B.; Bittencourt, C.; Roberts, J.D.; Weber, J. Scoring the Technology Performance Level (TPL) Assessment. In Proceedings of the 12th European Wave and Tidal Energy Conference, Cork, Ireland, 27 August–1 September 2017. [Google Scholar]
- Bull, D.; Roberts, J.; Malins, R.; Babarit, A.; Weber, J.; Dykes, K.; Costello, R.; Kennedy, B.; Neilson, K.; Bittencourt, C. Systems engineering applied to the development of a wave energy farm. In Progress in Renewable Energies Offshore: Proceedings of the 2nd International Conference on Renewable Energies Offshore (RENEW2016), Lisbon, Portugal, 24–26 October 2016; Taylor & Francis Books Ltd.: London, UK, 2016; pp. 189–196. [Google Scholar]
- Weber, J.W.; Laird, D. Structured Innovation of High-Performance Wave Energy Converter Technology. In Proceedings of the 11th European Wave and Tidal Energy Conference, Nantes, France, 6–11 September 2015. [Google Scholar]
- Weber, J.W.; Laird, D.; Costello, R.; Roberts, J.; Bull, D.; Babarit, A.; Nielsen, K.; Ferreira, C.B.; Kennedy, B. Cost, Time, and Risk Assessment of Different Wave Energy Converter Technology Development Trajectories. In Proceedings of the 12th European Wave and Tidal Energy Conference, Cork, Ireland, 27 August–1 September 2017. [Google Scholar]
- Alves, M. Frequency-domain models. In Numerical Modelling of Wave Energy Converters: State-of-the-Art Techniques for Single Devices and Arrays; Elsevier: Amsterdam, The Netherlands, 2016; pp. 11–30. [Google Scholar]
- Ricci, P. Time-domain models. In Numerical Modelling of Wave Energy Converters: State-of-the-Art Techniques for Single Devices and Arrays; Elsevier: Amsterdam, The Netherlands, 2016; pp. 31–66. [Google Scholar]
- Windt, C.; Davidson, J.; Ringwood, J.V. High-fidelity numerical modelling of ocean wave energy systems: A review of computational fluid dynamics-based numerical wave tanks. Renew. Sustain. Energy Rev. 2018, 93, 610–630. [Google Scholar] [CrossRef]
- Schmitt, P.; Doherty, K.; Clabby, D.; Whittaker, T. The opportunities and limitations of using CFD in the development of wave energy converters. In Proceedings of the RINA Marine and Offshore Energy Conference, Aalborg, Denmark, 20–25 May 2012. [Google Scholar]
- Yeung, R.W. A comparative evaluation of numerical methods in free-surface hydrodynamics. In Hydrodynamics of Ocean Wave-Energy Utilization; Springer: Cham, Switzerland, 1986; pp. 325–356. [Google Scholar]
- Li, Y.; Yu, Y.H. A synthesis of numerical methods for modeling wave energy converter-point absorbers. Renew. Sustain. Energy Rev. 2012, 16, 4352–4364. [Google Scholar] [CrossRef]
- Folley, M.; Babarit, A.; Child, B.; Forehand, D.; O’Boyle, L.; Silverthorne, K.; Spinneken, J.; Stratigaki, V.; Troch, P. A review of numerical modelling of wave energy converter arrays. In Proceedings of the ASME 2012 31st International Conference on Ocean, Offshore and Arctic Engineering, Rio de Janeiro, Brazil, 1–6 July 2012; pp. 535–545. [Google Scholar]
- De Chowdhury, S.; Nader, J.R.; Sanchez, A.M.; Fleming, A.; Winship, B.; Illesinghe, S.; Toffoli, A.; Babanin, A.; Penesis, I.; Manasseh, R. A review of hydrodynamic investigations into arrays of ocean wave energy converters. arXiv 2015, arXiv:1508.00866. [Google Scholar]
- Wolgamot, H.A.; Fitzgerald, C.J. Nonlinear hydrodynamic and real fluid effects on wave energy converters. Proc. Inst. Mech. Eng. Part A J. Power Energy 2015, 229, 772–794. [Google Scholar] [CrossRef]
- Penalba, M.; Giorgi, G.; Ringwood, J.V. Mathematical modelling of wave energy converters: A review of nonlinear approaches. Renew. Sustain. Energy Rev. 2017, 78, 1188–1207. [Google Scholar] [CrossRef]
- Zullah, M.A.; Lee, Y.H. Review of Fluid Structure Interaction Methods Application to Floating Wave Energy Converter. Int. J. Fluid Mach. Syst. 2018, 11, 63–76. [Google Scholar] [CrossRef]
- Zabala, I.; Henriques, J.; Blanco, J.; Gomez, A.; Gato, L.; Bidaguren, I.; Falcão, A.; Amezaga, A.; Gomes, R. Wave-induced real-fluid effects in marine energy converters: Review and application to OWC devices. Renew. Sustain. Energy Rev. 2019, 111, 535–549. [Google Scholar] [CrossRef]
- Saincher, S.; Banerjee, J. Influence of wave breaking on the hydrodynamics of wave energy converters: A review. Renew. Sustain. Energy Rev. 2016, 58, 704–717. [Google Scholar] [CrossRef]
- Coe, R.G.; Neary, V.S. Review of methods for modeling wave energy converter survival in extreme sea states. In Proceedings of the 2nd Marine Energy Technology Symposium METS 2014, Seattle, WA, USA, 15–18 April 2014. [Google Scholar]
- Coe, R.; Yu, Y.H.; Van Rij, J. A survey of wec reliability, survival and design practices. Energies 2018, 11, 4. [Google Scholar] [CrossRef]
- Folley, M. Numerical Modelling of Wave Energy Converters: State-of-the-Art Techniques for Single Devices and Arrays; Elsevier: Amsterdam, The Netherlands, 2016. [Google Scholar]
- Todalshaug, J.H. Hydrodynamics of WECs. In Handbook of Ocean Wave Energy; Springer: Cham, Switzerland, 2017; pp. 139–158. [Google Scholar]
- Falnes, J. Ocean WAVEs and Oscillating Systems: Linear Interactions Including Wave-Energy Extraction; Cambridge University Press: Cambridge, UK, 2002. [Google Scholar]
- Newman, J.N. Marine Hydrodynamics; MIT Press: Cambridge, MA, USA, 1977. [Google Scholar]
- Yu, Y.H.; Li, Y. Reynolds-Averaged Navier–Stokes simulation of the heave performance of a two-body floating-point absorber wave energy system. Comput. Fluids 2013, 73, 104–114. [Google Scholar] [CrossRef]
- Davidson, J.; Windt, C.; Giorgi, G.; Genest, R.; Ringwood, J. Evaluation of energy maximising control systems for wave energy converters using OpenFOAM. In OpenFOAM-Selected Papers of the 11th Workshop; Nbrega, J.M., Jasak, H., Eds.; Springer: Cham, Switzerland, 2018; Volume 2018. [Google Scholar]
- Giorgi, G.; Ringwood, J.V. Nonlinear Froude-Krylov and viscous drag representations for wave energy converters in the computation/fidelity continuum. Ocean Eng. 2017, 141, 164–175. [Google Scholar] [CrossRef]
- Viuff, T.H.; Andersen, M.T.; Kramer, M.; Jakobsen, M.M. Excitation forces on point absorbers exposed to high order non-linear waves. In Proceedings of the 10th European Wave and Tidal Energy Conference European Wave and Tidal Energy Conference, Aalborg, Denmark, 2–5 Septemeber 2013. [Google Scholar]
- Ning, D.Z.; Shi, J.; Zou, Q.P.; Teng, B. Investigation of hydrodynamic performance of an OWC (oscillating water column) wave energy device using a fully nonlinear HOBEM (higher-order boundary element method). Energy 2015, 83, 177–188. [Google Scholar] [CrossRef]
- Giorgi, G.; Ringwood, J. Importance of Nonlinear Wave Representation for Nonlinear Froude—Krylov Force Calculations for Wave Energy Devices. In Proceedings of the 12th European Wave and Tidal Energy Conference, Cork, Ireland, 27 August–2 September 2017; Volume 27. [Google Scholar]
- Le Mehaute, B. An Introduction to Hydrodynamics and Water Waves; Springer Science & Business Media: Berlin/Heidelberg, Germany, 1976. [Google Scholar]
- Davidson, J.; Kalmar-Nagy, T.; Giorgi, G.; Ringwood, J.V. Nonlinear rock and roll—Modelling and control of parametric rresonances in wave energy devices. In Proceedings of the 9th Vienna International Conference on Mathematical Modelling, Vienna, Austria, 21–23 February 2018. [Google Scholar]
- Babarit, A.; Mouslim, H.; Clément, A.; Laporte-Weywada, P. On the numerical modelling of the nonlinear behaviour of a wave energy converter. In Proceedings of the 28th International Conference on Offshore Mechanics & Arctic Engineering, Honolulu, HI, USA, 31 May–5 June 2009. [Google Scholar]
- Palm, J.; Bergdahl, L.; Eskilsson, C. Parametric excitation of moored wave energy converters using viscous and non-viscous CFD simulations. In Proceedings of the 3rd International Conference on Renewable Energies Offshore, Lisbon, Portugal, 8–10 October 2018. [Google Scholar]
- Davidson, J.; Karimov, M.; Szelechman, A.; Windt, C.; Ringwood, J.V. Dynamic mesh motion in OpenFOAM for wave energy converter simulation. In Proceedings of the 14th Open FOAM Workshop, Duisburg, Germany, 23–26 July 2019. [Google Scholar]
- Giorgi, G.; Ringwood, J.V. A Compact 6-DoF Nonlinear Wave Energy Device Model for Power Assessment and Control Investigations. IEEE Trans. Sustain. Energy 2019, 10, 119–126. [Google Scholar] [CrossRef]
- McDonald, A.; Xiao, Q.; Forehand, D.; Smith, H.; Costello, R. Initial development of a generic method for analysis of flexible membrane wave energy converters. In Proceedings of the 3rd International Conference on Renewable Energies Offshore, Lisbon, Portugal, 8–10 October 2018. [Google Scholar]
- McDonald, A.; Xiao, Q.; Forehand, D.; Smith, H.; Costello, R. Linear analysis of fluid-filled membrane structures using generalised modes. In Proceedings of the 13th European Wave and Tidal Energy Conference, Naples, Italy, 1–6 September 2019. [Google Scholar]
- Diamond, C.A.; Judge, C.Q.; Orazov, B.; Savaş, Ö. Mass-modulation schemes for a class of wave energy converters: Experiments, models, and efficacy. Ocean Eng. 2015, 104, 452–468. [Google Scholar] [CrossRef]
- Tom, N.; Lawson, M.; Yu, Y.; Wright, A. Development of a nearshore oscillating surge wave energy converter with variable geometry. Renew. Energy 2016, 96, 410–424. [Google Scholar] [CrossRef]
- Folley, M.; Henry, A.; Whittaker, T. Contrasting the hydrodynamics of heaving and surging wave energy converters. In Proceedings of the 11th European Wave and Tidal Enerrgy Conference, Nantes, France, 6–11 September 2015. [Google Scholar]
- Giorgi, G.; Ringwood, J.V. Comparing nonlinear hydrodynamic forces in heaving point absorbers and oscillating wave surge converters. J. Ocean Eng. Mar. Energy 2017, 4, 25–35. [Google Scholar] [CrossRef]
- Wang, R.Q.; Ning, D.Z.; Zhang, C.W.; Zou, Q.P.; Liu, Z. Nonlinear and viscous effects on the hydrodynamic performance of a fixed OWC wave energy converter. Coast. Eng. 2018, 131, 42–50. [Google Scholar] [CrossRef]
- Fitzgerald, C.J. Nonlinear Potential Flow Models. In Numerical Modelling of Wave Energy Converters; Elsevier: Amsterdam, The Netherlands, 2016; pp. 83–104. [Google Scholar]
- Schmitt, P.; Elsaser, B. The application of Froude scaling to model tests of Oscillating Wave Surge Converters. Ocean Eng. 2017, 141, 108–115. [Google Scholar] [CrossRef]
- Windt, C.; Ringwood, J.; Davidson, J.; Schmitt, P. Contribution to the CCP-WSI Blind Test Series 3: Analysis of scaling effects of moored point-absorber wave energy converters in a CFD-based numerical wave tank. In Proceedings of the 29th International Ocean and Polar Engineering Conference, Honolulu, HI, USA, 16–21 June 2019. [Google Scholar]
- Palm, J.; Eskilsson, C.; Bergdahl, L.; Bensow, R. Assessment of Scale Effects, Viscous Forces and Induced Drag on a Point-Absorbing Wave Energy Converter by CFD Simulations. J. Mar. Sci. Eng. 2018, 6, 124. [Google Scholar] [CrossRef]
- Ferziger, J.H.; Peric, M. Computational Methods for Fluid Dynamics; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Xiao, H.; Cinnella, P. Quantification of model uncertainty in RANS simulations: A review. Prog. Aerosp. Sci. 2019, 108, 1–31. [Google Scholar] [CrossRef]
- Sagaut, P. Multiscale and Multiresolution Approaches in Turbulence: LES, DES and Hybrid RANS/LES Methods: Applications and Guidelines; World Scientific: Singapore, 2013. [Google Scholar]
- Hart, J. Comparison of turbulence modeling approaches to the simulation of a dimpled sphere. Procedia Eng. 2016, 147, 68–73. [Google Scholar] [CrossRef]
- Shin, S.; Lee, K.H.; Kim, D.S.; Kim, K.H.; Hong, K. A study on the optimal shape of wave energy conversion system using an oscillating water column. J. Coast. Res. 2013, 65, 1663–1669. [Google Scholar] [CrossRef]
- Thorimbert, Y.; Latt, J.; Cappietti, L.; Chopard, B. Virtual wave flume and Oscillating Water Column modeled by lattice Boltzmann method and comparison with experimental data. Int. J. Mar. Energy 2016, 14, 41–51. [Google Scholar] [CrossRef]
- Simonetti, I.; Crema, I.; Cappietti, L.; El Safti, H.; Oumeraci, H. Site-specific optimization of an OWC wave energy converter in a Mediterranean area. In Proceedings of the 2nd International Conference on Renewable Energies Offshore, Lisbon, Portugal, 24–26 October 2016; pp. 343–350. [Google Scholar]
- Cummins, W. The Impulse Response Function and Ship Motions; Technical Report; David Taylor Model Basin: Washington, DC, USA, 1962. [Google Scholar]
- Devolder, B.; Rauwoens, P.; Troch, P. Application of a buoyancy-modified k-ω SST turbulence model to simulate wave run-up around a monopile subjected to regular waves using OpenFOAM®. Coast. Eng. 2017, 125, 81–94. [Google Scholar] [CrossRef]
- Larsen, B.E.; Fuhrman, D.R. On the over-production of turbulence beneath surface waves in Reynolds-averaged Navier–Stokes models. J. Fluid Mech. 2018, 853, 419–460. [Google Scholar] [CrossRef]
- Sheng, W.; Alcorn, R.; Lewis, A. On thermodynamics in the primary power conversion of oscillating water column wave energy converters. J. Renew. Sustain. Energy 2013, 5, 023105. [Google Scholar] [CrossRef]
- Falcão, A.F.; Henriques, J.C. Oscillating-water-column wave energy converters and air turbines: A review. Renew. Energy 2016, 85, 1391–1424. [Google Scholar] [CrossRef]
- Falcão, A.F.; Henriques, J.C. The spring-like air compressibility effect in oscillating-water-column wave energy converters: Review and analyses. Renew. Sustain. Energy Rev. 2019, 112, 483–498. [Google Scholar] [CrossRef]
- López, I.; Carballo, R.; Taveira-Pinto, F.; Iglesias, G. Sensitivity of OWC performance to air compressibility. Renew. Energy 2020, 145, 1334–1347. [Google Scholar] [CrossRef]
- Elhanafi, A.; Macfarlane, G.; Fleming, A.; Leong, Z. Scaling and air compressibility effects on a three-dimensional offshore stationary OWC wave energy converter. Appl. Energy 2017, 189, 1–20. [Google Scholar] [CrossRef]
- Guanche, R. On the importance of calibration and validation procedures: Hybrid modeling. In Proceedings of the BCAM Workshop Hydrodynamics of Wave Energy Converters 2017, Bilbao, Spain, 3–7 April 2017. [Google Scholar]
- Hu, Z.; Causon, D.; Mingham, C.; Qian, L. Numerical wave tank study of a wave energy converter in heave. In Proceedings of the Nineteenth International Offshore and Polar Engineering Conference, Osaka, Japan, 21–26 July 2009. [Google Scholar]
- Hu, Z.Z.; Causon, D.M.; Mingham, C.G.; Qian, L. Numerical Simulation of Water Impact on a Wave Energy Converter in Free Fall Motion. Open J. Fluid Dyn. 2013, 3, 109. [Google Scholar] [CrossRef][Green Version]
- Westphalen, J.; Greaves, D.M.; Raby, A.; Hu, Z.Z.; Causon, D.M.; Mingham, C.G.; Omidvar, P.; Stansby, P.K.; Rogers, B.D. Investigation of wave-structure interaction using state of the art CFD techniques. Open J. Fluid Dyn. 2014, 4, 18. [Google Scholar] [CrossRef]
- Eskilsson, C.; Palm, J.; Kofoed, J.P.; Friis-Madsen, E. CFD study of the overtopping discharge of the Wave Dragon wave energy converter. In Proceedings of the 2nd International Conference on Renewable Energies Offshore, Lisbon, Portugal, 24–26 November 2014; pp. 287–294. [Google Scholar]
- Longuet-Higgins, M.S.; Cokelet, E.D. The deformation of steep surface waves on water. I. A numerical method of computation. Proc. R. Soc. Lond. Ser. A Math. Phys. Sci. 1976, 350, 1–26. [Google Scholar] [CrossRef]
- Greenhow, M.; Vinje, T.; Brevig, P.; Taylor, J. A theoretical and experimental study of the capsize of Salter’s duck in extreme waves. J. Fluid Mech. 1982, 118, 221–239. [Google Scholar] [CrossRef]
- Brevig, P.; Greenhow, M.; Vinje, T. Extreme wave forces on submerged wave energy devices. Appl. Ocean Res. 1982, 4, 219–225. [Google Scholar] [CrossRef]
- Engsig-Karup, A.P.; Monteserin, C.; Eskilsson, C. A Stabilised Nodal Spectral Element Method for Fully Nonlinear Water Waves, Part 2: Wave-body interaction. arXiv 2017, arXiv:1703.09697. [Google Scholar]
- Clement, A. Dynamic nonlinear response of OWC wave energy devices. Int. J. Offshore Polar Eng. 1997, 7, 1–6. [Google Scholar]
- Koo, W.; Kim, M.H. Nonlinear time-domain simulation of a land-based oscillating water column. J. Waterw. Port Coast. Ocean Eng. 2010, 136, 276–285. [Google Scholar] [CrossRef]
- Guerber, E.; Benoit, M.; Grilli, S.T.; Buvat, C. A fully nonlinear implicit model for wave interactions with submerged structures in forced or free motion. Eng. Anal. Bound. Elem. 2012, 36, 1151–1163. [Google Scholar] [CrossRef]
- Lee, K.R.; Koo, W.; Kim, M.H. Fully nonlinear time-domain simulation of a backward bent duct buoy floating wave energy converter using an acceleration potential method. Int. J. Nav. Archit. Ocean Eng. 2013, 5, 513–528. [Google Scholar] [CrossRef]
- Koo, W.C.; Kim, S.J. Nonlinear time-domain simulation of backward bent duct buoy (BBDB) floating wave energy converter. In Proceedings of the 10th European Wave and Tidal Energy Conference European Wave and Tidal Energy Conference, Aalborg, Denmark, 2–5 Septemeber 2013. [Google Scholar]
- Kim, S.J.; Koo, W.; Kim, M.H. Nonlinear time-domain NWT simulations for two types of a backward bent duct buoy (BBDB) compared with 2D wave-tank experiments. Ocean Eng. 2015, 108, 584–593. [Google Scholar] [CrossRef]
- Abbasnia, A.; Ghiasi, M.; Barandiaran, J.; Soares, C.G. An implicit model of a submerged horizontal cylinder oscillating about an off-centered axis as a wave energy converter. In Renewable Energies Offshore; Taylor & Francis Group: London, UK, 2015; Volume 1, pp. 247–255. [Google Scholar]
- Jiang, Y.; Yeung, R.W. Computational modeling of rolling wave-energy converters in a viscous fluid. J. Offshore Mech. Arct. Eng. 2015, 137, 061901. [Google Scholar] [CrossRef]
- Abbasnia, A.; Soares, C.G. Fully nonlinear simulation of wave interaction with a cylindrical wave energy converter in a numerical wave tank. Ocean Eng. 2018, 152, 210–222. [Google Scholar] [CrossRef]
- Abbasnia, A.; Soares, C.G. Hydrodynamic analysis of a land-based oscillating water column device using fully nonlinear numerical wave flume. In Advances in Renewable Energies Offshore: Proceedings of the 3rd International Conference on Renewable Energies Offshore (RENEW 2018), Lisbon, Portugal, 8–10 October 2018; CRC Press: Boca Raton, FL, USA, 2018; p. 465. [Google Scholar]
- Kim, S.; Koo, W.; Shin, M. Numerical study on nonlinear hydrodynamic performance of a heaving buoy type wave energy converter under nonlinear wave condition. In Advances in Renewable Energies Offshore: Proceedings of the 3rd International Conference on Renewable Energies Offshore (RENEW 2018), Lisbon, Portugal, 8–10 October 2018; CRC Press: Boca Raton, FL, USA, 2018; p. 291. [Google Scholar]
- Sun, S.Y.; Sun, S.L.; Wu, G.X. Fully Nonlinear Time Domain Analysis for Hydrodynamic Performance of An Oscillating Wave Surge Converter. China Ocean Eng. 2018, 32, 582–592. [Google Scholar] [CrossRef]
- Cheng, Y.; Ji, C.; Zhai, G.; Ma, Z. Fully nonlinear simulation of wave-current interaction with an oscillating wave surge converter. J. Mar. Sci. Technol. 2019, 24, 1–18. [Google Scholar] [CrossRef]
- Kim, S.; Koo, W. Numerical simulation of a latching controlled heaving-buoy-type point absorber by using a 3D numerical wave tank. In Proceedings of the 13th European Wave and Tidal Energy Conference, Naples, Italy, 1–6 September 2019. [Google Scholar]
- Kim, S.J.; Koo, W. Development of a Three-Dimensional Fully Nonlinear Potential Numerical Wave Tank for a Heaving Buoy Wave Energy Converter. Math. Probl. Eng. 2019, 2019, 5163597. [Google Scholar] [CrossRef]
- Feng, A.; Chen, Z.M.; Price, W.G. A Rankine source computation for three dimensional wave-body interactions adopting a nonlinear body boundary condition. Appl. Ocean Res. 2014, 47, 313–321. [Google Scholar] [CrossRef]
- Yokota, R. An FMM based on dual tree traversal for many-core architectures. J. Algorithms Comput. Technol. 2013, 7, 301–324. [Google Scholar] [CrossRef]
- Fochesato, C.; Dias, F. A fast method for nonlinear three-dimensional free-surface waves. Proc. R. Soc. Lond. A Math. Phys. Eng. Sci. 2006, 462, 2715–2735. [Google Scholar] [CrossRef]
- Sung, H.G.; Grilli, S.T. BEM computations of 3-d fully nonlinear free-surface flows caused by advancing surface disturbances. Int. J. Offshore Polar Eng. 2008, 18, 292–301. [Google Scholar]
- Harris, J.C.; Dombre, E.; Benoit, M.; Grilli, S.T. A comparison of methods in fully nonlinear boundary element numerical wave tank development. In Proceedings of the 14émes Journées de l’Hydrodynamique, Val-de-Reuil, France, 18–20 November 2014. [Google Scholar]
- Grilli, S.T.; Guyenne, P.; Dias, F. A fully non-linear model for three-dimensional overturning waves over an arbitrary bottom. Int. J. Numer. Methods Fluids 2001, 35, 829–867. [Google Scholar] [CrossRef]
- Harris, J.C.; Kuznetsov, K.; Peyrard, C.; Saviot, S.; Mivehchi, A.; Grilli, S.T.; Benoit, M. Simulation of Wave Forces on a Gravity Based Foundation by a BEM Based on Fully Nonlinear Potential Flow. In Proceedings of the 27th International Ocean and Polar Engineering Conference, San Francisco, CA, USA, 25–30 June 2017. [Google Scholar]
- Maestre, J.; Cuesta, I.; Pallares, J. An unsteady 3D Isogeometrical Boundary Element Analysis applied to nonlinear gravity waves. Comput. Methods Appl. Mech. Eng. 2016, 310, 112–133. [Google Scholar] [CrossRef]
- Abbasnia, A.; Ghiasi, M. Simulation of irregular waves over submerged obstacle on a NURBS potential numerical wave tank. Lat. Am. J. Solids Struct. 2014, 11, 2308–2332. [Google Scholar] [CrossRef]
- Bai, W.; Taylor, R.E. Higher-order boundary element simulation of fully nonlinear wave radiation by oscillating vertical cylinders. Appl. Ocean Res. 2006, 28, 247–265. [Google Scholar] [CrossRef]
- Zhou, B.; Ning, D.; Teng, B.; Bai, W. Numerical investigation of wave radiation by a vertical cylinder using a fully nonlinear HOBEM. Ocean Eng. 2013, 70, 1–13. [Google Scholar] [CrossRef]
- Zhou, B.Z.; Ning, D.Z.; Teng, B.; Zhao, M. Fully nonlinear modeling of radiated waves generated by floating flared structures. Acta Mech. Sin. 2014, 30, 667–680. [Google Scholar] [CrossRef]
- Fenton, J.D.; Rienecker, M.M. A Fourier method for solving nonlinear water-wave problems: Application to solitary-wave interactions. J. Fluid Mech. 1982, 118, 411–443. [Google Scholar] [CrossRef]
- Ducrozet, G.; Bonnefoy, F.; Le Touzé, D.; Ferrant, P. HOS-ocean: Open-source solver for nonlinear waves in open ocean based on High-Order Spectral method. Comput. Phys. Commun. 2016, 203, 245–254. [Google Scholar] [CrossRef]
- Bonnefoy, F.; Ducrozet, G.; Le Touzé, D.; Ferrant, P. Time domain simulation of nonlinear water waves using spectral methods. In Advances in Numerical Simulation of Nonlinear Water Waves; World Scientific: Singapore, 2010; pp. 129–164. [Google Scholar]
- Ducrozet, G.; Bonnefoy, F.; Le Touzé, D.; Ferrant, P. A modified high-order spectral method for wavemaker modeling in a numerical wave tank. Eur. J. Mech. -B/Fluids 2012, 34, 19–34. [Google Scholar] [CrossRef]
- Gouin, M.; Ducrozet, G.; Ferrant, P. Development and validation of a non-linear spectral model for water waves over variable depth. Eur. J. Mech. -B/Fluids 2016, 57, 115–128. [Google Scholar] [CrossRef]
- Langfeld, K.; Graham, D.I.; Greaves, D.M.; Mehmood, A.; Reis, T. The Virtual Source Approach to Non-Linear Potential Flow Simulations. In Proceedings of the 26th International Ocean and Polar Engineering Conference, Rhodes, Greece, 26 June–2 July 2016. [Google Scholar]
- Al-Tameemi, O.; Graham, D.I.; Langfeld, K. Accuracy and Stability of Virtual Source Method for Numerical Simulations of Nonlinear Water Waves. In Proceedings of the 28th International Ocean and Polar Engineering Conference, Sapporo, Japan, 10–15 June 2018. [Google Scholar]
- Wu, G.X.; Taylor, R.E. Finite element analysis of two-dimensional non-linear transient water waves. Appl. Ocean Res. 1994, 16, 363–372. [Google Scholar] [CrossRef]
- Wang, C.; Wu, G. A brief summary of finite element method applications to nonlinear wave-structure interactions. J. Mar. Sci. Appl. 2011, 10, 127–138. [Google Scholar] [CrossRef]
- Wu, G.X.; Taylor, R.E. Time stepping solutions of the two-dimensional nonlinear wave radiation problem. Ocean Eng. 1995, 22, 785–798. [Google Scholar] [CrossRef]
- Cai, X.; Langtangen, H.P.; Nielsen, B.F.; Tveito, A. A finite element method for fully nonlinear water waves. J. Comput. Phys. 1998, 143, 544–568. [Google Scholar] [CrossRef]
- Hosters, N.; Helmig, J.; Stavrev, A.; Behr, M.; Elgeti, S. Fluid–structure interaction with NURBS-based coupling. Comput. Methods Appl. Mech. Eng. 2018, 332, 520–539. [Google Scholar] [CrossRef]
- Sevilla, R.; Fernández-Méndez, S.; Huerta, A. NURBS-enhanced finite element method (NEFEM). Arch. Comput. Methods Eng. 2011, 18, 441. [Google Scholar] [CrossRef]
- Engsig-Karup, A.P.; Eskilsson, C.; Bigoni, D. A stabilised nodal spectral element method for fully nonlinear water waves. J. Comput. Phys. 2016, 318, 1–21. [Google Scholar] [CrossRef]
- Robertson, I.; Sherwin, S. Free-surface flow simulation using hp/spectral elements. J. Comput. Phys. 1999, 155, 26–53. [Google Scholar] [CrossRef]
- Ma, Q.W.; Yan, S. Quasi ALE finite element method for nonlinear water waves. J. Comput. Phys. 2006, 212, 52–72. [Google Scholar] [CrossRef]
- Ma, Q. Numerical generation of freak waves using MLPG_R and QALE-FEM methods. Comput. Model. Eng. Sci. 2007, 18, 223. [Google Scholar]
- Ma, Q.W.; Yan, S. QALE-FEM for numerical modelling of non-linear interaction between 3D moored floating bodies and steep waves. Int. J. Numer. Methods Eng. 2009, 78, 713–756. [Google Scholar] [CrossRef]
- Patera, A.T. A spectral element method for fluid dynamics: Laminar flow in a channel expansion. J. Comput. Phys. 1984, 54, 468–488. [Google Scholar] [CrossRef]
- Karniadakis, G.; Sherwin, S. Spectral/hp Element Methods for Computational Fluid Dynamics; Oxford University Press: Oxford, UK, 2013. [Google Scholar]
- Eskilsson, C.; Engsig-Karup, A.P.; Sherwin, S.J.; Hesthaven, J.S.; Bergdahl, L. The next step in coastal numerical models: Spectral/hp element methods. In Proceedings of the 5th International Symposium on Ocean Wave Measurement and Analysis (WAVES2005), Madrid, Spain, 3–7 July 2005. [Google Scholar]
- Xu, H.; Cantwell, C.D.; Monteserin, C.; Eskilsson, C.; Engsig-Karup, A.P.; Sherwin, S.J. Spectral/hp element methods: Recent developments, applications, and perspectives. J. Hydrodyn. 2018, 30, 1–22. [Google Scholar] [CrossRef]
- Monteserin, C.; Engsig-Karup, A.P.; Eskilsson, C. Nonlinear Wave-Body Interaction Using a Mixed-Eulerian-Lagrangian Spectral Element Model. In Proceedings of the ASME 2018 37th International Conference on Ocean, Offshore and Arctic Engineering, Madrid, Spain, 17–22 June 2018. [Google Scholar]
- Engsig-Karup, A.P.; Eskilsson, C. Spectral element FNPF simulation of focused wave groups impacting a fixed FPSO. In Proceedings of the 28th International Ocean and Polar Engineering Conference, Sapporo, Japan, 10–15 June 2018. [Google Scholar]
- Laskowski, W.; Bingham, H.B.; Engsig-Karup, A.P. Modelling of Wave-structure Interaction for Cylindrical Structures using a Spectral Element Multigrid Method. In Proceedings of the 34th IWWWFB, Newcastle, Australia, 7–10 April 2019. [Google Scholar]
- Engsig-Karup, A.P.; Monteserin, C.; Eskilsson, C. A Mixed Eulerian-Lagrangian Spectral Element Method for Nonlinear Wave Interactionwith Fixed Structures. Water Waves 2019, 1, 315–342. [Google Scholar] [CrossRef]
- Ransley, E.; Yan, S.; Brown, S.; Mai, T.; Graham, D.; Ma, Q.; Musiedlak, P.H.; Engsig-Karup, A.P.; Eskilsson, C.; Li, Q.; et al. A blind comparative study of focused wave interactions with a fixed FPSO-like structure (CCP-WSI Blind Test Series 1). Int. J. Offshore Polar Eng. 2019, 29, 113–127. [Google Scholar] [CrossRef]
- Bingham, H.B.; Zhang, H. On the accuracy of finite-difference solutions for nonlinear water waves. J. Eng. Math. 2007, 58, 211–228. [Google Scholar] [CrossRef]
- Li, B.; Fleming, C.A. A three dimensional multigrid model for fully nonlinear water waves. Coast. Eng. 1997, 30, 235–258. [Google Scholar] [CrossRef]
- Engsig-Karup, A.P.; Bingham, H.B.; Lindberg, O. An efficient flexible-order model for 3D nonlinear water waves. J. Comput. Phys. 2009, 228, 2100–2118. [Google Scholar] [CrossRef]
- Ducrozet, G.; Bingham, H.B.; Engsig-Karup, A.P.; Ferrant, P. High-order finite difference solution for 3D nonlinear wave-structure interaction. J. Hydrodyn. Ser. B 2010, 22, 225–230. [Google Scholar] [CrossRef]
- Ferrant, P.; Gentaz, L.; Alessandrini, B.; Luquet, R.; Monroy, C.; Ducrozet, G.; Jacquin, E.; Drouet, A. Fully nonlinear potential/RANSE simulation of wave interaction with ships and marine structures. In Proceedings of the 27th International Conference on Offshore Mechanics and Artic Engineering OMAE, Estoril, Portugal, 15–20 June 2008. [Google Scholar]
- Ducrozet, G.; Engsig-Karup, A.P.; Bingham, H.B.; Ferrant, P. A non-linear wave decomposition model for efficient wave-Structure interaction. Part A: Formulation, validations and analysis. J. Comput. Phys. 2014, 257, 863–883. [Google Scholar] [CrossRef]
- Ducrozet, G.; Bingham, H.B.; Engsig-Karup, A.P.; Bonnefoy, F.; Ferrant, P. A comparative study of two fast nonlinear free-surface water wave models. Int. J. Numer. Methods Fluids 2012, 69, 1818–1834. [Google Scholar] [CrossRef]
- Yates, M.L.; Benoit, M. Accuracy and efficiency of two numerical methods of solving the potential flow problem for highly nonlinear and dispersive water waves. Int. J. Numer. Methods Fluids 2015, 77, 616–640. [Google Scholar] [CrossRef]
- Christiansen, T.B.; Bingham, H.B.; Engsig-Karup, A.P.; Ducrozet, G.; Ferrant, P. Efficient hybrid-spectral model for fully nonlinear numerical wave tank. In Proceedings of the ASME 2013 32nd International Conference on Ocean, Offshore and Arctic Engineering, Nantes, France, 9–14 July 2013. [Google Scholar]
- Shao, Y.L.; Faltinsen, O.M. Towards efficient fully-nonlinear potential-flow solvers in marine hydrodynamics. In Proceedings of the 31st International Conference on Ocean, Offshore and Arctic Engineering (OMAE), Rio de Janeiro, Brazil, 1–6 July 2012. [Google Scholar]
- Shao, Y.L.; Faltinsen, O.M. A harmonic polynomial cell (HPC) method for 3D Laplace equation with application in marine hydrodynamics. J. Comput. Phys. 2014, 274, 312–332. [Google Scholar] [CrossRef]
- Shao, Y.L.; Faltinsen, O.M. Fully-nonlinear wave-current-body interaction analysis by a harmonic polynomial cell method. J. Offshore Mech. Arct. Eng. 2014, 136, 031301. [Google Scholar] [CrossRef]
- Hanssen, F.C.W.; Greco, M.; Shao, Y. The Harmonic Polynomial Cell Method for Moving Bodies Immersed in a Cartesian Background Grid. In Proceedings of the ASME 2015 34th International Conference on Ocean, Offshore and Arctic Engineering, St John’s, NL, Canada, 31 May–5 June 2015. [Google Scholar]
- Hanssen, F. Non-Linear Wave-Body Interaction in Severe Waves. Ph.D. Thesis, Norwegian University of Science and Technology, Trondheim, Norway, 2019. [Google Scholar]
- Zhu, W.; Greco, M.; Shao, Y. Improved HPC method for nonlinear wave tank. Int. J. Nav. Archit. Ocean Eng. 2017, 9, 598–612. [Google Scholar] [CrossRef]
- Ma, S.; Hanssen, F.C.; Siddiqui, M.A.; Greco, M.; Faltinsen, O.M. Local and global properties of the harmonic polynomial cell method: In-depth analysis in two dimensions. Int. J. Numer. Methods Eng. 2017, 113, 681–718. [Google Scholar] [CrossRef]
- Robaux, F.; Benoit, M. Modelling nonlinear wave-body interaction with the Harmonic Polynomial Cell method combined with the Immersed Boundary Method on a fixed grid. In Proceedings of the 33rd International Workshop on Water Waves and Floating Bodies, Guidel-Plages, France, 4–7 April 2018. [Google Scholar]
- Eskilsson, C.; Palm, J.; Engsig-Karup, A.; Bosi, U.; Ricchiuto, M. Wave Induced Motions of Point-Absorbers: A Hierarchical Investigation of Hydrodynamic Models. In Proceedings of the 11th European Wave and Tidal Enerrgy Conference, Nantes, France, 6–11 September 2015. [Google Scholar]
- Bosi, U.; Engsig-Karup, A.; Eskilsson, C.; Ricchiuto, M. A Spectral/hp Element Depth-Integrated Model for Nonlinear Wave-Body Interaction; Technical Report; Inria Bordeaux Sud-Ouest: Talence, France; Technical University of Denmark: Lyngby, Denmark; University of Aalborg: Aalborg, Denmark; RISE: Gothenburg, Sweden, 2018. [Google Scholar]
- Bosi, U.; Engsig-Karup, A.P.; Eskilsson, C.; Ricchiuto, M.; Solai, E. A high-order spectral element unified boussinesq model for floating point absorbers. In Proceedings of the 36th International Conference on Coastal Engineering, Baltimore, MD, USA, 30 July–3 August 2018. [Google Scholar]
- Bosi, U.; Engsig-Karup, A.P.; Eskilsson, C.; Ricchiuto, M. A spectral/hp element depth-integrated model for nonlinear wave-body interaction. Comput. Methods Appl. Mech. Eng. 2019, 348, 222–249. [Google Scholar] [CrossRef]
- Godlewski, E.; Parisot, M.; Sainte-Marie, J.; Wahl, F. Congested Shallow Water Model: Floating Object. 2018. Available online: https://hal.inria.fr/hal-01871708 (accessed on 8 January 2020).
- Wahl, F. Modeling and Analysis of Interactions between Free Surface Flows and Floating Structures. Ph.D. Thesis, Sorbonne Université, Paris, France, 2018. [Google Scholar]
- Rijnsdorp, D.P.; Hansen, J.; Lowe, R. Improving predictions of the coastal impacts of wave farms using a phase-resolving wave model. In Proceedings of the 12th European Wave and Tidal Energy Conference, Cork, Ireland, 27 August–1 September 2017. [Google Scholar]
- Rijnsdorp, D.P.; Hansen, J.E.; Lowe, R.J. Simulating the wave-induced response of a submerged wave-energy converter using a non-hydrostatic wave-flow model. Coast. Eng. 2018, 140, 189–204. [Google Scholar] [CrossRef]
- Rijnsdorp, D.; Orszaghova, J.; Skene, D.; Wolgamot, H.; Rafiee, A. Modelling motion instabilities of a submerged wave energy converter. In Proceedings of the 34th International Workshop on Water Waves and Floating Bodies, Newcastle, Australia, 7–10 April 2019. [Google Scholar]
- Tom, J.G.; Rijnsdorp, D.P.; Ragni, R.; White, D.J. Fluid-Structure-Soil Interaction of a Moored Wave Energy Device. In Proceedings of the 38th International Conference on Ocean, Offshore and Arctic Engineering, Glasgow, UK, 9–14 June 2019. [Google Scholar]
- Madsen, P.A.; SCHÄFFER, H.A. A review of Boussinesq-type equations for surface gravity waves. In Advances in Coastal and Ocean Engineering; World Scientific: Singapore, 1999; pp. 1–94. [Google Scholar]
- Brocchini, M. A reasoned overview on Boussinesq-type models: The interplay between physics, mathematics and numerics. Proc. R. Soc. A Math. Phys. Eng. Sci. 2013, 469, 20130496. [Google Scholar] [CrossRef]
- Jiang, T.; Henn, R. Nonlinear Waves Generated by A Surface-Piercing Body Using A Unified Shallow-Water Theory. In Proceedings of the 15th International Workshop on Water Waves and Floating Bodies, Caesarea, Israel, 27 February–1 March 2000. [Google Scholar]
- Eskilsson, C.; Sherwin, S.J. Spectral/hp discontinuous Galerkin methods for modelling 2D Boussinesq equations. J. Comput. Phys. 2006, 212, 566–589. [Google Scholar] [CrossRef]
- Eskilsson, C.; Sherwin, S. An hp/spectral element model for efficient long-time integration of Boussinesq-type equations. Coast. Eng. J. 2003, 45, 295–320. [Google Scholar] [CrossRef]
- Mohapatra, S.; Soares, C.G. Wave forces on a floating structure over flat bottom based on Boussinesq formulation. In Renew. Energies Offshore; Taylor & Francis Group: London, UK, 2015; pp. 335–342. [Google Scholar]
- Mohapatra, S.; Islam, H.; Soares, C.G. Wave diffraction by a floating fixed truncated vertical cylinder based on Boussinesq equations. In Advances in Renewable Energies Offshore: Proceedings of the 3rd International Conference on Renewable Energies Offshore (RENEW 2018), Lisbon, Portugal, 8–10 October 2018; CRC Press: Boca Raton, FL, USA, 2018; p. 281. [Google Scholar]
- Stansby, P.; Zhou, J. Shallow-water flow solver with non-hydrostatic pressure: 2D vertical plane problems. Int. J. Numer. Methods Fluids 1998, 28, 541–563. [Google Scholar] [CrossRef]
- Casulli, V.; Stelling, G.S. Numerical simulation of 3D quasi-hydrostatic, free-surface flows. J. Hydraul. Eng. 1998, 124, 678–686. [Google Scholar] [CrossRef]
- Zijlema, M.; Stelling, G.; Smit, P. SWASH: An operational public domain code for simulating wave fields and rapidly varied flows in coastal waters. Coast. Eng. 2011, 58, 992–1012. [Google Scholar] [CrossRef]
- Vinje, T. An approach to the non-linear solution of the oscillating water column. Appl. Ocean Res. 1991, 13, 18–36. [Google Scholar] [CrossRef]
- Mavrakos, S.A.; Katsaounis, G.M.; Chatjigeorgiou, I.K. Performance characteristics of a tightly moored piston-like wave energy converter under first-and second-order wave loads. In Proceedings of the ASME 2008 27th International Conference on Offshore Mechanics and Arctic Engineering, Estoril, Portugal, 15–20 June 2008. [Google Scholar]
- Bretl, J.G. A Time Domain Model for Wave Induced Motions Coupled to Energy Extraction. Ph.D. Thesis, University of Michigan, Ann Arbor, MI, USA, 2009. [Google Scholar]
- Bellew, S.; Stallard, T. Linear modelling of wave device arrays and comparison to experimental and second order models. In Proceedings of the Workshop for Water Waves and Floating Bodies, Harbin, China, 9–12 May 2010. [Google Scholar]
- Nader, J.R.; Zhu, S.P.; Cooper, P. On the efficiency of oscillating water column (OWC) devices in converting ocean wave energy to electricity under weakly nonlinear waves. In Proceedings of the ASME 2012 31st International Conference on Ocean, Offshore and Arctic Engineering, Rio de Janeiro, Brazil, 1–6 July 2012. [Google Scholar]
- Merigaud, A.; Gilloteaux, J.C.; Ringwood, J.V. A nonlinear extension for linear boundary element methods in wave energy device modelling. In Proceedings of the ASME 2012 31st International Conference on Ocean, Offshore and Arctic Engineering, Rio de Janeiro, Brazil, 1–6 July 2012. [Google Scholar]
- Wolgamot, H.; Taylor, R.E.; Taylor, P. Effects of second-order hydrodynamics on the efficiency of a wave energy array. Int. J. Mar. Energy 2016, 15, 85–99. [Google Scholar] [CrossRef]
- Wuillaume, P.Y.; Rongère, F.; Babarit, A.; Philippe, M.; Ferrant, P. Development and adaptation of the Composite Rigid Body Algorithm and the Weak-Scatterer approach in view of the modeling of marine operations. In Congrès Français de Mécanique; AFM: New York, NY, USA, 2017. [Google Scholar]
- Bozonnet, P.; Dupin, V.; Tona, P.; Kramer, M.M.; Chauvigné, C. Applicability of linear and non-linear potential flow models on a Wavestar float. In Proceedings of the 12th European Wave and Tidal Energy Conference, Cork, Ireland, 27 August–1 September 2017. [Google Scholar]
- Letournel, L.; Chauvigné, C.; Gelly, B.; Babarit, A.; Ducrozet, G.; Ferrant, P. Weakly nonlinear modeling of submerged wave energy converters. Appl. Ocean Res. 2018, 75, 201–222. [Google Scholar] [CrossRef]
- Michele, S.; Sammarco, P.; d’Errico, M. Weakly nonlinear theory for oscillating wave surge converters in a channel. J. Fluid Mech. 2018, 834, 55–91. [Google Scholar] [CrossRef]
- Michele, S.; Renzi, E.; Sammarco, P. A second-order theory for wave energy converters with curved geometry. In Proceedings of the 33rd International Workshop on Water Waves and Floating Bodies (IWWWFB), Guidel-Plages, France, 4–7 April 2018. [Google Scholar]
- Michele, S.; Renzi, E. A second-order theory for an array of curved wave energy converters in open sea. J. Fluids Struct. 2019, 88, 315–330. [Google Scholar] [CrossRef]
- Michele, S.; Renzi, E.; Sammarco, P. Weakly nonlinear theory for a gate-type curved array in waves. J. Fluid Mech. 2019, 869, 238–263. [Google Scholar] [CrossRef]
- Michele, S.; Renzi, E.; Sammarco, P. Weakly nonlinear theory of an array of surging wave energy converters with curved geometry. In Proceedings of the 13th European Wave and Tidal Energy Conference, Naples, Italy, 1–6 September 2019. [Google Scholar]
- Pawlowski, J. A Nonlinear Theory of Ship Motion in Waves. In Proceedings of the 19th Symposium on Naval Hydrodynamics, Seoul, Korea, 24–28 August 1992. [Google Scholar]
- Letournel, L. Développement d’un outil de simulation numérique basé sur l’approche “Weak-Scatterer” Pour L’étude des Systèmes Houlomoteurs en Grands Mouvements. Ph.D. Thesis, Ecole Centrale de Nantes, Nantes, France, 2015. [Google Scholar]
- Letournel, L.; Ferrant, P.; Babarit, A.; Ducrozet, G.; Harris, J.C.; Benoit, M.; Dombre, E. Comparison of fully nonlinear and weakly nonlinear potential flow solvers for the study of wave energy converters undergoing large amplitude motions. In Proceedings of the 33rd International Conference on Ocean, Offshore and Arctic Engineering, San Francisco, CA, USA, 8–13 June 2014. [Google Scholar]
- Chauvigné, C.; Letournel, L.; Babarit, A.; Ducrozet, G.; Bozonnet, P.; Gilloteaux, J.C.; Ferrant, P. Progresses in the Development of a Weakly-Nonlinear Wave Body Interaction Model Based on the Weak-Scatterer Approximation. In Proceedings of the ASME 2015 International Conference on Ocean, Offshore and Artic Engineering, St John’s, NL, Canada, 31 May–5 June 2015. [Google Scholar]
- Wuillaume, P.Y.; Ferrant, P.; Babarit, A.; Rongère, F.; Lynch, M.; Combourieu, A. Comparison Between Experiments and a Multibody Weakly Nonlinear Potential Flow Approach for Modeling of Marine Operations. In Proceedings of the ASME 2018 37th International Conference on Ocean, Offshore and Arctic Engineering, Madrid, Spain, 17–22 June 2018. [Google Scholar]
- Shao, Y.L. Numerical Potential-Flow Studies on Weakly-Nonlinear Wave-Body Interactions with/without Small Forward Speeds. Ph.D. Thesis, Norwegian University of Science and Technology, Trondheim, Norway, 2010. [Google Scholar]
- Lee, C.H.; Newman, J. Computation of wave effects using the panel method. WIT Trans. State-of-the-Art Sci. Eng. 2005, 18, 211–251. [Google Scholar]
- Shao, Y.L.; Faltinsen, O.M. Use of body-fixed coordinate system in analysis of weakly nonlinear wave-body problems. Appl. Ocean Res. 2010, 32, 20–33. [Google Scholar] [CrossRef]
- Shao, Y.L.; Faltinsen, O.M. Second-order diffraction and radiation of a floating body with small forward speed. J. Offshore Mech. Arct. Eng. 2013, 135, 011301. [Google Scholar] [CrossRef]
- Nader, J. Limitation of the second-order wave theory in low frequencies. Mar. Struct. 2015, 43, 143–147. [Google Scholar] [CrossRef]
- McCabe, A.; Aggidis, G.A.; Stallard, T. A time-varying parameter model of a body oscillating in pitch. Appl. Ocean Res. 2006, 28, 359–370. [Google Scholar] [CrossRef]
- Crooks, D.J. Nonlinear Hydrodynamic Modelling of an Oscillating Wave Surge Converter. Ph.D. Thesis, Queen’s University Belfast, Belfast, UK, 2017. [Google Scholar]
- Schubert, B.W.; Meng, F.; Sergiienko, N.Y.; Robertson, W.; Cazzolato, B.S.; Ghayesh, M.H.; Rafiee, A. Pseudo-Nonlinear Hydrodynamic Coefficients for Modelling Point Absorber Wave Energy Converters. In Proceedings of the 4th Asian Wave and Tidal Energy Conference, Taipei, Taiwan, 9–13 September 2018. [Google Scholar]
- Papillon, L.; Wang, L.; Tom, N.; Weber, J.; Ringwood, J. Parametric modelling of a reconfigurable wave energy device. Ocean Eng. 2019, 186, 106105. [Google Scholar] [CrossRef]
- Laporte Weywada, P.; Cruz, J.; Scriven, J.; Vuorinen, M.; Maki, T. Preliminary validation of a 1MW oscillating wave surge converter WEC-Sim model. In Proceedings of the 13th European Wave and Tidal Energy Conference, Naples, Italy, 1–6 September 2019. [Google Scholar]
- Davidson, J.; Giorgi, S.; Ringwood, J.V. Linear parametric hydrodynamic models for ocean wave energy converters identified from numerical wave tank experiments. Ocean Eng. 2015, 103, 31–39. [Google Scholar] [CrossRef]
- Guerinel, M.; Zurkinden, A.S.; Alves, M.; Sarmento, A.J. Validation of a partially nonlinear time domain model using instantaneous froude-krylov and hydrostatic forces. In Proceedings of the 10th European Wave and Tidal Energy Conference European Wave and Tidal Energy Conference, Aalborg, Denmark, 2–5 Septemeber 2013. [Google Scholar]
- Lawson, M.; Yu, Y.H.; Nelessen, A.; Ruehl, K.; Michelen, C. Implementing Nonlinear Buoyancy and Excitation Forces in the WEC-Sim Wave Energy Converter Modeling Tool. In Proceedings of the 33rd International Conference on Ocean, Offshore and Arctic Engineering, San Francisco, CA, USA, 8–13 June 2014. [Google Scholar]
- Gilloteaux, J.; Ducrozet, G.; Babarit, A.; Clement, A. Non-Linear model to simulate large amplitude motions: Application to wave energy conversion. In Proceedings of the 20th International Workshop on Water Waves and Floating Bodies, Longyearbyen, Norway, 29 May–1 June 2007. [Google Scholar]
- Gilloteaux, J.C.; Babarit, A.; Ducrozet, G.; Durand, M.; Clément, A. A Non-Linear Potential Model to Predict Large-Amplitudes-Motions: Application to the SEAREV Wave Energy Converter. In Proceedings of the ASME 2007 26th International Conference on Offshore Mechanics and Arctic Engineering, San Diego, CA, USA, 10–15 June 2007. [Google Scholar]
- Gilloteaux, J.C.; Bacelli, G.; Ringwood, J. A non-linear potential model to predict large-amplitudes-motions: Application to a multi-body wave energy converter. In Proceedings of the World Renewable Energy Congress, Glasgow, UK, 19–25 July 2008. [Google Scholar]
- Penalba, M.; Mérigaud, A.; Gilloteaux, J.C.; Ringwood, J.V. Influence of nonlinear Froude–Krylov forces on the performance of two wave energy points absorbers. J. Ocean Eng. Mar. Energy 2017, 3, 209–220. [Google Scholar] [CrossRef]
- Wendt, F.F.; Yu, Y.H.; Nielsen, K.; Ruehl, K.; Bunnik, T.; Touzon, I.; Nam, B.W.; Kim, J.S.; Kim, K.H.; Janson, C.E.; et al. International Energy Agency Ocean Energy Systems Task 10 Wave Energy Converter Modeling Verification and Validation. In Proceedings of the 12th European Wave and Tidal Energy Conference, Cork, Ireland, 27 August–1 September 2017. [Google Scholar]
- Giorgi, G.; Ringwood, J.V. Relevance of pressure field accuracy for nonlinear Froude–Krylov force calculations for wave energy devices. J. Ocean Eng. Mar. Energy 2018, 4, 57–71. [Google Scholar] [CrossRef]
- Morison, J.R.; Johnson, J.W.; Schaaf, S.A. The force exerted by surface waves on piles. J. Pet. Technol. 1950, 2, 149–154. [Google Scholar] [CrossRef]
- Babarit, A.; Hals, J.; Muliawan, M.; Kurniawan, A.; Moan, T.; Krokstad, J. Numerical benchmarking study of a selection of wave energy converters. Renew. Energy 2012, 41, 44–63. [Google Scholar] [CrossRef]
- Zurkinden, A.S.; Ferri, F.; Beatty, S.; Kofoed, J.P.; Kramer, M. Non-linear numerical modeling and experimental testing of a point absorber wave energy converter. Ocean Eng. 2014, 78, 11–21. [Google Scholar] [CrossRef]
- Davis, A.F.; Fabien, B.C. Systematic identification of drag coefficients for a heaving wave follower. Ocean Eng. 2018, 168, 1–11. [Google Scholar] [CrossRef]
- Guo, B.; Patton, R.; Jin, S.; Gilbert, J.; Parsons, D. Nonlinear modeling and verification of a heaving point absorber for wave energy conversion. IEEE Trans. Sustain. Energy 2018, 9, 453–461. [Google Scholar] [CrossRef]
- Brown, A.; Thomson, J.; Rusch, C. Hydrodynamic Coefficients of Heave Plates, With Application to Wave Energy Conversion. IEEE J. Oceanic Eng. 2017, 43, 983–996. [Google Scholar] [CrossRef]
- Rusch, C.; Maurer, B.; Mundon, T.; Stewart, A.; Polagye, B. Hydrodynamics and Scaling of Heave Plates for Point Absorbing Wave Energy Converters. In Proceedings of the 12th European Wave and Tidal Energy Conference, Cork, Ireland, 27 August–1 September 2017. [Google Scholar]
- Mundon, T.; Rosenberg, B.; van Rij, J. Reaction body hydrodynamics for a multi-DOF point-absorbing WEC. In Proceedings of the 12th European Wave and Tidal Energy Conference, Cork, Ireland, 27 August–1 September 2017. [Google Scholar]
- Bhinder, M.A.; Babarit, A.; Gentaz, L.; Ferrant, P. Assessment of viscous damping via 3d-cfd modelling of a floating wave energy device. In Proceedings of the 9th European Wave and Tidal Energy Conference, Southampton, UK, 5–9 September 2011. [Google Scholar]
- Bhinder, M.A.; Babarit, A.; Gentaz, L.; Ferrant, P. Potential time domain model with viscous correction and CFD analysis of a generic surging floating wave energy converter. Int. J. Mar. Energy 2015, 10, 70–96. [Google Scholar] [CrossRef]
- Nematbakhsh, A.; Michailidis, K.; Gao, Z.; Moan, T. Comparison of experimental data of a moored multibody wave energy device with a hybrid CFD and BIEM numerical analysis framework. In Proceedings of the ASME 2015 34th International Conference on Ocean, Offshore and Arctic Engineering, St John’s, NL, Canada, 31 May–5 June 2015. [Google Scholar]
- Jin, S.; Patton, R.J.; Guo, B. Viscosity effect on a point absorber wave energy converter hydrodynamics validated by simulation and experiment. Renew. Energy 2018, 129, 500–512. [Google Scholar] [CrossRef]
- Gu, H.; Stansby, P.; Stallard, T.; Moreno, E.C. Drag, added mass and radiation damping of oscillating vertical cylindrical bodies in heave and surge in still water. J. Fluids Struct. 2018, 82, 343–356. [Google Scholar] [CrossRef]
- Chen, Z.F.; Zhou, B.Z.; Zhang, L.; Zhang, W.C.; Wang, S.Q.; Zang, J. Geometrical evaluation on the viscous effect of point-absorber wave-energy converters. China Ocean Eng. 2018, 32, 443–452. [Google Scholar] [CrossRef]
- Bhinder, M.A.; Murphy, J. Evaluation of the Viscous Drag for a Domed Cylindrical Moored Wave Energy Converter. J. Mar. Sci. Eng. 2019, 7, 120. [Google Scholar] [CrossRef]
- Giorgi, G.; Ringwood, J.V. Consistency of Viscous Drag Identification Tests for Wave Energy Applications. In Proceedings of the 12th European Wave and Tidal Energy Conference, Cork, Ireland, 27 August–1 September 2017. [Google Scholar]
- Dias, F.; Renzi, E.; Gallagher, S.; Sarkar, D.; Wei, Y.; Abadie, T.; Cummins, C.; Rafiee, A. Analytical and computational modelling for wave energy systems: The example of oscillating wave surge converters. Acta Mech. Sin. 2017, 33, 647–662. [Google Scholar] [CrossRef] [PubMed]
- Folley, M.; Whittaker, T.; Van’t Hoff, J. The design of small seabed-mounted bottom-hinged wave energy converters. In Proceedings of the 7th European Wave and Tidal Energy Conference, Porto, Portugal, 11–13 September 2007. [Google Scholar]
- Folley, M.; Whittaker, T. Spectral modelling of wave energy converters. Coast. Eng. 2010, 57, 892–897. [Google Scholar] [CrossRef]
- Genest, R.; Davidson, J.; Ringwood, J.V. Adaptive control of a wave energy converter. IEEE Trans. Sustain. Energy 2018, 9, 1588–1595. [Google Scholar]
- Cummins, C.; Dias, F. A new model of viscous dissipation for an oscillating wave surge converter. J. Eng. Math. 2017, 103, 195–216. [Google Scholar] [CrossRef]
- Feng, X.; Chen, X.; Dias, F. A potential flow model with viscous dissipation based on a modified boundary element method. Eng. Anal. Bound. Elem. 2018, 97, 1–15. [Google Scholar] [CrossRef]
- Lee, C.H.; Zhu, X. Application of Hyper-Singular Integral Equations for a Simplified Model of Viscous Dissipation. In Proceedings of the 28th International Ocean and Polar Engineering Conference, Sapporo, Japan, 10–15 June 2018. [Google Scholar]
- Chorin, A.J. Numerical study of slightly viscous flow. J. Fluid Mech. 1973, 57, 785–796. [Google Scholar] [CrossRef]
- Campana, E.; Di Mascio, A.; Esposito, P.; Lalli, F. Viscous-inviscid coupling in free surface ship flows. Int. J. Numer. Methods Fluids 1995, 21, 699–722. [Google Scholar] [CrossRef]
- Lock, R.; Williams, B. Viscous-inviscid interactions in external aerodynamics. Prog. Aerosp. Sci. 1987, 24, 51–171. [Google Scholar] [CrossRef]
- Clément, A.H.; Josset, C.; Duclos, G. A Coupled Rankine/Kelvin BEM 3D Solver for the Time-Domain Simulation of OWC Wave Power plants. In Proceedings of the 12th International Offshore and Polar Engineering Conference, Kitakyushu, Japan, 26–31 May 2002. [Google Scholar]
- Josset, C.; Clément, A. A time-domain numerical simulator for oscillating water column wave power plants. Renew. Energy 2007, 32, 1379–1402. [Google Scholar] [CrossRef]
- Charrayre, F.; Peyrard, C.; Benoit, M.; Babarit, A. A coupled methodology for wave-body interactions at the scale of a farm of wave energy converters including irregular bathymetry. In Proceedings of the 33rd International Conference on Ocean, Offshore and Arctic Engineering, San Francisco, CA, USA, 8–13 June 2014. [Google Scholar]
- Wei, Y.; Abadie, T.; Dias, F. A cost-effective method for modelling wave-OWSC interaction. In Proceedings of the 26th International Ocean and Polar Engineering Conference, Rhodes, Greece, 26 June–2 July 2016. [Google Scholar]
- Ferrer, P.; Causon, D.; Qian, L.; Mingham, C.; Ma, Z. Numerical simulation of wave slamming on a flap type oscillating wave energy device. In Proceedings of the Twenty-Sixth International Ocean and Polar Engineering Conference, Rhodes, Greece, 26 June–2 July 2016; pp. 65–71. [Google Scholar]
- Belibassakis, K.; Gerostathis, T.P.; Athanassoulis, G. A 3D-BEM coupled-mode method for WEC arrays in variable bathymetry. In Progress in Renewable Energies Offshore: Proceedings of the 2nd International Conference on Renewable Energies Offshore (RENEW2016), Lisbon, Portugal, 24–26 October 2016; CRC Press: Boca Raton, FL, USA, 2016; p. 365. [Google Scholar]
- Belibassakis, K.; Bonovas, M.; Rusu, E. A novel method for estimating wave energy converter performance in variable bathymetry regions and applications. Energies 2018, 11, 2092. [Google Scholar] [CrossRef]
- Tomey-Bozo, N.; Murphy, J.; Babarit, A.; Troch, P.; Lewis, T.; Thomas, G. Wake effect assessment of a flap type wave energy converter farm using a coupling methodology. In Proceedings of the ASME 2017 36th International Conference on Ocean, Offshore and Arctic Engineering, Busan, Korea, 19–24 July 2017. [Google Scholar]
- Tomey-Bozo, N.; Babarit, A.; Murphy, J.; Stratigaki, V.; Troch, P.; Lewis, T.; Thomas, G. Wake effect assessment of a flap type wave energy converter farm under realistic environmental conditions by using a numerical coupling methodology. Coast. Eng. 2019, 143, 96–112. [Google Scholar] [CrossRef]
- Balitsky, P.; Fernandez, G.V.; Stratigaki, V.; Troch, P. Coupling methodology for modelling the near-field and far-field effects of a wave energy converter. In Proceedings of the ASME 2017 36th International Conference on Ocean, Offshore and Arctic Engineering, Busan, Korea, 19–24 July 2017. [Google Scholar]
- Balitsky, P.; Verao Fernandez, G.; Stratigaki, V.; Troch, P. Assessment of the power output of a two-array clustered WEC farm using a BEM solver coupling and a Wave-Propagation Model. Energies 2018, 11, 2907. [Google Scholar] [CrossRef]
- Fernandez, G.V.; Balitsky, P.; Bozo, N.T.; Stratigaki, V.; Troch, P. Far-field effects by arrays of oscillating wave surge converters and heaving point absorbers: a comparative study. In Proceedings of the 12th European Wave and Tidal Energy Conference, Cork, Ireland, 27 August–1 September 2017. [Google Scholar]
- Fernandez, G.V.; Balitsky, P.; Stratigaki, V.; Troch, P. Coupling Methodology for Studying the Far Field Effects of Wave Energy Converter Arrays over a Varying Bathymetry. Energies 2018, 11, 2899. [Google Scholar] [CrossRef]
- Verao Fernández, G.; Stratigaki, V.; Troch, P. Irregular Wave Validation of a Coupling Methodology for Numerical Modelling of Near and Far Field Effects of Wave Energy Converter Arrays. Energies 2019, 12, 538. [Google Scholar] [CrossRef]
- Verbrugghe, T.; Kortenhaus, A.; Troch, P.; Dominguez, J.M. A non-linear 2-way coupling between DualSPHysics and a wave propagation model. In Proceedings of the Spheric 2017, Ourense, Spain, 13–15 June 2017. [Google Scholar]
- Verbrugghe, T.; Devolder, B.; Dominguez, J.M.; Kortenhaus, A.; Troch, P. Feasibility study of applying SPH in a coupled simulation tool for wave energy converter arrays. In Proceedings of the 12th European Wave and Tidal Energy Conference, Cork, Ireland, 27 August–1 September 2017. [Google Scholar]
- Verbrugghe, T.; Stratigaki, V.; Altomare, C.; Domínguez, J.; Troch, P.; Kortenhaus, A. Implementation of Open Boundaries within a Two-Way Coupled SPH Model to Simulate Nonlinear Wave–Structure Interactions. Energies 2019, 12, 697. [Google Scholar] [CrossRef]
- Verbrugghe, T.; Domínguez, J.M.; Crespo, A.J.; Altomare, C.; Stratigaki, V.; Troch, P.; Kortenhaus, A. Coupling methodology for smoothed particle hydrodynamics modelling of non-linear wave-structure interactions. Coast. Eng. 2018, 138, 184–198. [Google Scholar] [CrossRef]
- Yan, S.; Wang, J.; Wang, J.; Ma, Q.; Xie, Z. Numerical simulation of wave structure interaction using QaleFOAM. In Proceedings of the 29th International Ocean and Polar Engineering Conference, Honolulu, HI, USA, 16–21 June 2019. [Google Scholar]
- Ransley, E.; Yan, S.; Brown, S.; Musiedlak, P.H.; Windt, C.; Schmitt, P.; Davidson, J.; Ringwood, J.; Wang, J.; Wang, J. A blind comparative study of focused wave interactions with floating structures (CCP-WSI Blind Test Series 3). Int. J. Offshore Polar Eng. 2019, in press. [Google Scholar] [CrossRef]
- Bingham, H.B. A hybrid Boussinesq-panel method for predicting the motion of a moored ship. Coast. Eng. 2000, 40, 21–38. [Google Scholar] [CrossRef]
- Balitsky, P.; Verao Fernandez, G.; Stratigaki, V.; Troch, P. Assessing the Impact on Power Production of WEC array separation distance in a wave farm using one-way coupling of a BEM solver and a wave propagation model. In Proceedings of the 12th European Wave and Tidal Energy Conference, Cork, Ireland, 27 August–1 September 2017. [Google Scholar]
- Verbrugghe, T.; Stratigaki, V.; Troch, P.; Rabussier, R.; Kortenhaus, A. A comparison study of a generic coupling methodology for modeling wake effects of wave energy converter arrays. Energies 2017, 10, 1697. [Google Scholar] [CrossRef]
- Christensen, E.D.; Bredmose, H.; Hansen, E.A. Transfer of Boussinesq Waves to a Navier-Stokes Solver: Application to Wave Loads on an Offshore Wind Turbine Foundation. In Proceedings of the ASME 2009 28th International Conference on Ocean, Offshore and Arctic Engineering, Honolulu, HI, USA, 31 May–5 June 2009. [Google Scholar]
- DHI. MIKE21, Boussinesq Wave Module; DHI Group: Horsholm, Denmark, 2008. [Google Scholar]
- Luquet, R.; Ducrozet, G.; Gentaz, L.; Ferrant, P.; Alessandrini, B. Applications of the SWENSE Method to seakeeping simulations in irregular waves. In Proceedings of the 9th International Conference on Numerical Ship Hydrodynamics, Ann Arbor, MI, USA, 5–8 August 2007. [Google Scholar]
- Alessandrini, B.; Ferrant, P.; Gentaz, L.; Luquet, R. Numerical Simulation of Ship Seakeeping by the SWENSE Approach. In Proceedings of the 10th International Ship Stability Workshop, Daejeon, Korea, 23–25 March 2008. [Google Scholar]
- Ferrant, P.; Gentaz, L.; Monroy, C.; Luquet, R.; Ducrozet, G.; Alessandrini, B.; Jacquin, E.; Drouet, A. Recent advances towards the viscous flow simulation of ships manoeuvring in waves. In Proceedings of the 23rd International Workshop on Water Waves and Floating Bodies, Jeju, Korea, 13–16 April 2008. [Google Scholar]
- Monroy, C.; Ducrozet, G.; Bonnefoy, F.; Babarit, A.; Gentaz, L.; Ferrant, P. RANS simulations of a CALM buoy in regular and irregular seas using the SWENSE method. In Proceedings of the 20th International Offshore and Polar Engineering Conference, Beijing, China, 20–25 June 2010. [Google Scholar]
- Reliquet, G.; Drouet, A.; Guillerm, P.E.; Jacquin, E.; Gentaz, L.; Ferrant, P. Simulation of wave-body interaction using a single-phase level set function in the swense method. In Proceedings of the ASME 2013 32nd International Conference on Ocean, Offshore and Arctic Engineering, Nantes, France, 9–14 July 2013. [Google Scholar]
- Li, Z.; Bouscasse, B.; Ducrozet, G.; Gentaz, L.; Ferrant, P. Challenges in developing a SWENSE two-phase CFD solver for complex wave conditions. In Proceedings of the 33rd International Workshop on Water Waves and Floating Bodies (IWWWFB), Guidel-Plages, France, 4–7 April 2018. [Google Scholar]
- Li, Z.; Bouscasse, B.; Gentaz, L.; Ducrozet, G.; Ferrant, P. Progress in coupling potential wave models and two-phase solvers with the SWENSE methodology. In Proceedings of the ASME 2018 37th International Conference on Ocean, Offshore and Arctic Engineering, Madrid, Spain, 17–22 June 2018. [Google Scholar]
- Vukcevic, V. Numerical Modelling of Coupled Potential and Viscous Flow for Marine Applications. Ph.D. Thesis, Zagreb, Zagreb, Croatia, 2016. [Google Scholar]
- Vukcevic, V.; Jasak, H.; Malenica, S. Decomposition model for naval hydrodynamic applications, Part II: Verification and validation. Ocean Eng. 2016, 121, 76–88. [Google Scholar] [CrossRef]
- Vukcevic, V.; Jasak, H.; Malenica, S. Decomposition model for naval hydrodynamic applications, Part I: Computational method. Ocean Eng. 2016, 121, 37–46. [Google Scholar] [CrossRef]
- Gatin, I.; Jasak, H.; Vukčević, V.; Downie, S. Focused Wave Loading on a Fixed FPSO Using Naval Hydro Pack. In Proceedings of the 28th International Ocean and Polar Engineering Conference, Sapporo, Japan, 10–15 June 2018. [Google Scholar]
- Choi, Y.; Gouin, M.; Ducrozet, G.; Bouscasse, B.; Ferrant, P. Grid2Grid: HOS Wrapper Program for CFD solvers. arXiv 2017, arXiv:1801.00026. [Google Scholar]
- Choi, Y.; Bouscasse, B.; Seng, S.; Ducrozet, G.; Gentaz, L.; Ferrant, P. Generation of regular and irregular waves in Navier-Stokes CFD solvers by matching with the nonlinear potential wave solution at the boundaries. In Proceedings of the ASME 2018 37th International Conference on Ocean, Offshore and Arctic Engineering, Madrid, Spain, 17–22 June 2018. [Google Scholar]
- Paulsen, B.T.; Bredmose, H.; Bingham, H.B. An efficient domain decomposition strategy for wave loads on surface piercing circular cylinders. Coast. Eng. 2014, 86, 57–76. [Google Scholar] [CrossRef]
- Jacobsen, N.G. Waves2Foam Manual. 2017. Available online: www.researchgate.net/publication/319160515waves2FoamManual (accessed on 8 January 2020).
- Kemper, J.; Windt, C.; Graf, K.; Ringwood, J. Development towards a nested hydrodynamic model for the numerical analysis of ocean wave energy systems. In Proceedings of the 13th European Wave and Tidal Energy Conference, Naples, Italy, 1–6 September 2019. [Google Scholar]
- Li, Q.; Wang, J.; Yan, S.; Gong, J.; Ma, Q. A zonal hybrid approach coupling FNPT with OpenFOAM for modelling wave-structure interactions with action of current. Ocean Syst. Eng. 2018, 8, 381–407. [Google Scholar]
- Li, Q.; Zhuang, Y.; Wan, D.; Chen, G. Numerical Analysis of the Interaction Between a Fixed FPSO Benchmark Model and Focused Waves. In Proceedings of the 28th International Ocean and Polar Engineering Conference, Sapporo, Japan, 10–15 June 2018. [Google Scholar]
- Kristiansen, T. Gap resonances analyzed by a domain-decomposition method. In Proceedings of the 26th International Workshop on Water Waves and Floating Bodies, Athens, Greece, 17–20 April 2011. [Google Scholar]
- Kristiansen, T.; Faltinsen, O.M. Gap resonance analyzed by a new domain-decomposition method combining potential and viscous flow DRAFT. Appl. Ocean Res. 2012, 34, 198–208. [Google Scholar] [CrossRef]
- Kristiansen, T.; Sauder, T.; Firoozkoohi, R. Validation of a hybrid code combining potential and viscous flow with application to 3D moonpool. In Proceedings of the ASME 2013 32nd International Conference on Ocean, Offshore and Arctic Engineering, Nantes, France, 9–14 July 2013. [Google Scholar]
- Ommani, B.; Kristiansen, T.; Firoozkoohi, R. Nonlinear Roll Damping, a Numerical Parameter Study. In Proceedings of the 25th International Ocean and Polar Engineering Conference, Beijing, China, 20–25 June 2015. [Google Scholar]
- Cao, Y.; Zhang, F.; Joung, T.H.; Ostman, A.; Kristiansen, T. An Assessment of Prediction Methods for Waves Inside the Moonpool of a Vessel (Comparisons of Numerical Solutions With Experiments). In Proceedings of the ASME 2015 34th International Conference on Ocean, Offshore and Arctic Engineering, St John’s, NL, Canada, 31 May–5 June 2015. [Google Scholar]
- Colicchio, G.; Greco, M.; Faltinsen, O. A BEM-level set domain-decomposition strategy for non-linear and fragmented interfacial flows. Int. J. Numer. Methods Eng. 2006, 67, 1385–1419. [Google Scholar] [CrossRef]
- Siddiqui, M.; Greco, M.; Colicchio, G.; Faltinsen, O. Validation of damaged ship hydrodynamics by a Domain Decomposition Approach using the Harmonic Polynomial Cell method and OpenFOAM. In Proceedings of the 33rd International Workshop on Water Waves and Floating Bodies (IWWWFB), Guidel-Plages, France, 4–7 April 2018. [Google Scholar]
- Hanssen, F.C.W.; Colicchio, G.; Greco, M. Severe Wave-Body Interactions: A Potential-Flow HPC Method and its Strong Domain-Decomposition Coupling with a Level-Set Navier-Stokes Solver. In Proceedings of the 34th International Workshop on Water Waves and Floating Bodies, Newcastle, Australia, 7–10 April 2019. [Google Scholar]
- Lee, E.S.; Moulinec, C.; Xu, R.; Violeau, D.; Laurence, D.; Stansby, P. Comparisons of weakly compressible and truly incompressible algorithms for the SPH mesh free particle method. J. Comput. Phys. 2008, 227, 8417–8436. [Google Scholar] [CrossRef]
- Stansby, P. Smoothed Particle Hydrodynamics (SPH) for renewable energies offshore. In Advances in Renewable Energies Offshore: Proceedings of the 3rd International Conference on Renewable Energies Offshore (RENEW 2018), Lisbon, Portugal, 8–10 October 2018; CRC Press: Boca Raton, FL, USA, 2018; p. 11. [Google Scholar]
- Fourtakas, G.; Stansby, P.K.; Rogers, B.D.; Lind, S.J.; Yan, S.; Ma, Q.W. On the coupling of Incompressible SPH with a Finite Element potential flow solver for nonlinear free surface flows. In Proceedings of the 27th International Ocean and Polar Engineering Conference, San Francisco, CA, USA, 25–30 June 2017. [Google Scholar]
- Zhang, N.; Yan, S.; Zheng, X.; Ma, Q. A 3-D Hybrid Model Coupling SPH and QALE-FEM for Simulating Nonlinear Water Wave Interaction with Floating Structure. In Proceedings of the 29th International Ocean and Polar Engineering Conference, Honolulu, HI, USA, 16–21 June 2019. [Google Scholar]
- Kassiotis, C.; Ferrand, M.; Violeau, D.; Rogers, B.; Stansby, P.; Benoit, M. Coupling SPH with a 1-D Boussinesq-type wave model. In Proceedings of the 6th International SPHERIC Workshop, Hamburg, Germany, 8–10 June 2011. [Google Scholar]
- Kumar, P.; Yang, Q.; Jones, V.; McCue-Weil, L. Coupled SPH-FVM simulation within the OpenFOAM framework. Procedia Iutam 2015, 18, 76–84. [Google Scholar] [CrossRef]
- Teixeira, C.M. Incorporating turbulence models into the lattice-Boltzmann method. Int. J. Mod. Phys. C 1998, 9, 1159–1175. [Google Scholar] [CrossRef]
- Jahanshaloo, L.; Pouryazdanpanah, E.; Che Sidik, N.A. A review on the application of the lattice Boltzmann method for turbulent flow simulation. Numer. Heat Transf. Part A Appl. 2013, 64, 938–953. [Google Scholar] [CrossRef]
- Thürey, N.; Rüde, U. Stable free surface flows with the lattice Boltzmann method on adaptively coarsened grids. Comput. Vis. Sci. 2009, 12, 247–263. [Google Scholar] [CrossRef]
- Eitel-Amor, G.; Meinke, M.; Schröder, W. A lattice-Boltzmann method with hierarchically refined meshes. Comput. Fluids 2013, 75, 127–139. [Google Scholar] [CrossRef]
- Geller, S.; Krafczyk, M.; Tölke, J.; Turek, S.; Hron, J. Benchmark computations based on lattice-Boltzmann, finite element and finite volume methods for laminar flows. Comput. Fluids 2006, 35, 888–897. [Google Scholar] [CrossRef]
- Janßen, C.; Krafczyk, M. Free surface flow simulations on GPGPUs using the LBM. Comput. Math. Appl. 2011, 61, 3549–3563. [Google Scholar] [CrossRef]
- Janssen, C.F.; Krafczyk, M.; Grilli, S. Modeling of Wave Breaking AndWave-Structure Interactions By Coupling of Fully Nonlinear Potential Flow And Lattice-Boltzmann Models. In Proceedings of the 20th International Offshore and Polar Engineering Conference, Beijing, China, 20–25 June 2010. [Google Scholar]
- Janßen, C.F.; Grilli, S.T.; Krafczyk, M. On enhanced non-linear free surface flow simulations with a hybrid LBM—VOF model. Comput. Math. Appl. 2013, 65, 211–229. [Google Scholar] [CrossRef]
- O’Reilly, C.; Grilli, S.; Dahl, J.; Janssen, C.F.; Banari, A.; Shock, J.J.; Uberrueck, M. A Hybrid Naval Hydrodynamic Scheme Based on an Efficient Lattice Boltzmann Method Coupled to a Potential Flow Solver. In Proceedings of the 13th International Conference on Fast Sea Transportation, Washington, DC, USA, 1–4 September 2015. [Google Scholar]
- Mivehchi, A.; Harris, J.C.; Grilli, S.T.; Dahl, J.M.; O’Reilly, C.M.; Kuznetsov, K.; Janssen, C.F. A hybrid solver based on efficient BEM-potential and LBM-NS models: Recent BEM developments and applications to naval hydrodynamics. In Proceedings of the 27th International Ocean and Polar Engineering Conference, San Francisco, CA, USA, 25–30 June 2017. [Google Scholar]
- Janßen, C.F.; Mierke, D.; Überrück, M.; Gralher, S.; Rung, T. Validation of the GPU-accelerated CFD solver ELBE for free surface flow problems in civil and environmental engineering. Computation 2015, 3, 354–385. [Google Scholar] [CrossRef]
- Harris, J.C.; O’Reilly, C.M.; Mivehchi, A.; Kuznetsov, K.; Janssen, C.F.; Grilli, S.T.; Dahl, J.M. Hybrid modeling of wave structure interaction with overlapping viscous-inviscid domains. In Proceedings of the 33rd International Workshop on Water Waves and Floating Bodies (IWWWFB), Guidel-Plages, France, 4–7 April 2018. [Google Scholar]
- Bouhrim, H.; Marjani, A.E. On numerical modeling in OWC systems for wave energy conversion. In Proceedings of the 2014 International Renewable and Sustainable Energy Conference (IRSEC), Ouarzazate, Morocco, 17–19 October 2014. [Google Scholar]
- Bacigaluppi, P.; Ricchiuto, M.; Bonneton, P. Implementation and Evaluation of Breaking Detection Criteria for a Hybrid Boussinesq Model. arXiv 2019, arXiv:1902.03021. [Google Scholar] [CrossRef]
- Ringwood, J.V.; Davidson, J.; Giorgi, S. Identifying models using recorded data. In Numerical Modelling of Wave Energy Converters: State-of-the-Art Techniques for Single Devices and Arrays; Elsevier: Amsterdam, The Netherlands, 2016; pp. 123–147. [Google Scholar]
- Davidson, J.; Giorgi, S.; Ringwood, J. Linear parametric hydrodynamic models based on numerical wave tank experiments. In Proceedings of the 10th European Wave and Tidal Energy Conference European Wave and Tidal Energy Conference, Aalborg, Denmark, 2–5 Septemeber 2013. [Google Scholar]
- Armesto, J.A.; Guanche, R.; Iturrioz, A.; Vidal, C.; Losada, I.J. Identification of state-space coefficients for oscillating water columns using temporal series. Ocean Eng. 2014, 79, 43–49. [Google Scholar] [CrossRef]
- Gkikas, G. Development of a novel time-frequency enhanced Volterra System identification method for the modeling of a Nonlinear OWC Wave Energy Converter under irregular sea wave excitation. In Proceedings of the 33rd International Conference on Ocean, Offshore and Arctic Engineering, San Francisco, CA, USA, 8–13 June 2014. [Google Scholar]
- Gkikas, G.; Athanassoulis, G. Development of a novel nonlinear system identification scheme for the pressure fluctuation inside an oscillating water column-wave energy converter Part I: Theoretical background and harmonic excitation case. Ocean Eng. 2014, 80, 84–99. [Google Scholar] [CrossRef]
- Davidson, J.; Giorgi, S.; Ringwood, J.V. Numerical wave tank identification of nonlinear discrete time hydrodynamic models. Renew. Energ. Offshore 2015, 1, 279–286. [Google Scholar]
- Ringwood, J.V.; Davidson, J.; Giorgi, S. Optimising numerical wave tank tests for the parametric identification of wave energy device models. In Proceedings of the ASME 2015 34th International Conference on Ocean, Offshore and Arctic Engineering, St. John’s, NL, Canada, 31 May–5 June 2015. [Google Scholar]
- van’t Hoff, J.; Folley, M.; Whittaker, T. Numerical Modelling of an Oscillating Wave Surge Converter Using Volterra Theory. In Proceedings of the 11th European Wave and Tidal Energy Conference, Nantes, France, 6–11 September 2015. [Google Scholar]
- Giorgi, S.; Davidson, J.; Ringwood, J. Identification of nonlinear excitation force kernels using numerical wave tank experiments. In Proceedings of the 11th European Wave and Tidal Energy Conference, Nantes, France, 6–11 September 2015. [Google Scholar]
- Giorgi, S.; Davidson, J.; Ringwood, J.V. Identification of wave energy device models from numerical wave tank data—Part 2: Data-based model determination. IEEE Trans. Sustain. Energy 2016, 7, 1020–1027. [Google Scholar] [CrossRef]
- Bacelli, G.; Coe, R.G.; Patterson, D.; Wilson, D. System identification of a heaving point absorber: Design of experiment and device modeling. Energies 2017, 10, 472. [Google Scholar] [CrossRef]
- Davidson, J.; Genest, R.; Ringwood, J.V. Adaptive control of a wave energy converter simulated in a numerical wave tank. In Proceedings of the 12th European Wave and Tidal Energy Conference, Cork, Ireland, 27 August–1 September 2017. [Google Scholar]
- Simonetti, I.; Cappietti, L.; Oumeraci, H. An empirical model as a supporting tool to optimize the main design parameters of a stationary oscillating water column wave energy converter. Appl. Energy 2018, 231, 1205–1215. [Google Scholar] [CrossRef]
- Giorgi, S.; Davidson, J.; Jakobsen, M.; Kramer, M.; Ringwood, J. Identification of dynamic models for a wave energy converter from experimental data. Ocean Eng. 2019, 183, 426–436. [Google Scholar] [CrossRef]
- Davidson, J.; Ringwood, J. Mathematical modelling of mooring systems for wave Energy Converters—A review. Energies 2017, 10, 666. [Google Scholar] [CrossRef]
- Davidson, J.; Giorgi, S.; Ringwood, J.V. Identification of wave energy device models from numerical wave tank data—Part 1: Numerical wave tank identification tests. IEEE Trans. Sustain. Energy 2016, 7, 1012–1019. [Google Scholar] [CrossRef]
- Cruz, J.; Rea, M.; Sarmento, A.; Thomas, G.; Henderson, R. Numerical and experimental modelling of WECs. In Ocean Wave Energy; Springer: Cham, Switzerland, 2008; pp. 133–188. [Google Scholar]
- Windt, C.; Davidson, J.; Schmitt, P.; Ringwood, J.V. On the Assessment of Numerical Wave Makers in CFD Simulations. J. Mar. Sci. Eng. 2019, 7, 47. [Google Scholar] [CrossRef]
- Draycott, S.; Davey, T.; Ingram, D.; Day, A.; Johanning, L. The SPAIR method: Isolating incident and reflected directional wave spectra in multidirectional wave basins. Coast. Eng. 2016, 114, 265–283. [Google Scholar] [CrossRef]
- de O Falcão, A.; Rodrigues, R. Stochastic modelling of OWC wave power plant performance. Appl. Ocean Res. 2002, 24, 59–71. [Google Scholar] [CrossRef]
- Gomes, R.; Henriques, J.; Gato, L.; Falcão, A. Wave power extraction of a heaving floating oscillating water column in a wave channel. Renew. Energy 2016, 99, 1262–1275. [Google Scholar] [CrossRef]
- Gomes, R.; Henriques, J.; Gato, L.; Falcao, A. An upgraded model for the design of spar-type floating oscillating water column devices. In Proceedings of the 13th European Wave and Tidal Energy Conference, Naples, Italy, 1–6 September 2019. [Google Scholar]
- Bachynski, E.E.; Young, Y.L.; Yeung, R.W. Analysis and optimization of a tethered wave energy converter in irregular waves. Renew. Energy 2012, 48, 133–145. [Google Scholar] [CrossRef]
- Folley, M. Spectral-Domain Models. In Numerical Modelling of Wave Energy Converters; Elsevier: Amsterdam, The Netherlands, 2016; pp. 67–80. [Google Scholar]
- Folley, M.; Whittaker, T. Preliminary cross-validation of wave energy converter array interactions. In Proceedings of the ASME 2013 32nd International Conference on Ocean, Offshore and Arctic Engineering, Nantes, France, 9–14 July 2013. [Google Scholar]
- Folley, M.; Whittaker, T. Validating a spectral-domain model of an OWC using physical model data. Int. J. Mar. Energy 2013, 2, 1–11. [Google Scholar] [CrossRef]
- Nie, R.; Scruggs, J.; Chertok, A.; Clabby, D.; Previsic, M.; Karthikeyan, A. Optimal causal control of wave energy converters in stochastic waves—Accommodating nonlinear dynamic and loss models. Int. J. Mar. Energy 2016, 15, 41–55. [Google Scholar] [CrossRef]
- Tom, N.; Lawson, M.; Yu, Y.H.; Wright, A. Spectral modeling of an oscillating surge wave energy converter with control surfaces. Appl. Ocean Res. 2016, 56, 143–156. [Google Scholar] [CrossRef]
- Gunawardane, S.; Folley, M.; Sanjaya, S. Spectral-Domain Modelling of the Non-Linear Hydrostatic Stiffness of a Heaving-Sphere Wave Energy Converter. In Proceedings of the 28th International Symposium on Transport Phenomena, Peradeniya, Sri Lanka, 22–24 September 2017. [Google Scholar]
- Ding, B.; da Silva, L.S.P.; Sergiienko, N.; Meng, F.; Piper, J.D.; Bennetts, L.; Wagner, M.; Cazzolato, B.; Arjomandi, M. Study of fully submerged point absorber wave energy converter-modelling, simulation and scaled experiment. In Proceedings of the 32nd International Workshop on Water Waves and Floating Bodies (IWWWFB), Dalian, China, 23–26 April 2017. [Google Scholar]
- Nguyen, P.T.; Manuel, L.; Coe, R.G. On the Development of an Efficient Surrogate Model for Predicting Long-Term Extreme Loads on a Wave Energy Converter. In Proceedings of the ASME 2018 37th International Conference on Ocean, Offshore and Arctic Engineering, Madrid, Spain, 17–22 June 2018. [Google Scholar]
- Parades, G.; Eskilsson, C.; Kofoed, J.P. Uncertainty quantification of the dynamics of a wave energy converter. In Proceedings of the VIII International Conference on Computational Methods in Marine Engineering (MARINE 2019), Gothenburg, Sweden, 13–15 May 2019. [Google Scholar]
- Silva, L.; Morishita, H.; Pesce, C.; Gonçalves, R. Nonlinear analysis of a heaving point absorber in frequency domain via statistical linearization. In Proceedings of the 38th International Conference on Ocean, Offshore and Arctic Engineering, Glasgow, UK, 9–14 June 2019. [Google Scholar]
- Silva, L.; Pesce, C.; Morishita, H.; Gonçalves, R. Nonlinear analysis of an oscillating water column wave energy device in frequency domain via statistical linearization. In Proceedings of the 38th International Conference on Ocean, Offshore and Arctic Engineering, Glasgow, UK, 9–14 June 2019. [Google Scholar]
- Xiu, D.; Karniadakis, G.E. The Wiener–Askey polynomial chaos for stochastic differential equations. SIAM J. Sci. Comput. 2002, 24, 619–644. [Google Scholar] [CrossRef]
- Ge, L.; Cheung, K.F.; Kobayashi, M.H. Stochastic solution for uncertainty propagation in nonlinear shallow-water equations. J. Hydraul. Eng. 2008, 134, 1732–1743. [Google Scholar] [CrossRef]
- Kreuzer, E.; Solowjow, E. Polynomial Chaos and the Heave Motion of a Cylinder in Random Seas. PAMM 2015, 15, 559–560. [Google Scholar] [CrossRef]
- Bigoni, D.; Engsig-Karup, A.P.; Eskilsson, C. Efficient uncertainty quantification of a fully nonlinear and dispersive water wave model with random inputs. J. Eng. Math. 2016, 101, 87–113. [Google Scholar] [CrossRef]
- Lim, H.; Manuel, L.; Low, Y.M. On efficient long-term extreme response estimation for a moored floating structure. In Proceedings of the ASME 2018 37th International Conference on Ocean, Offshore and Arctic Engineering, Madrid, Spain, 17–22 June 2018. [Google Scholar]
- Spanos, P.; Di Paola, M.; Failla, G. A Galerkin approach for power spectrum determination of nonlinear oscillators. Meccanica 2002, 37, 51–65. [Google Scholar] [CrossRef]
- Failla, G.; Spanos, P.; Di Paola, M. Response power spectrum of multi-degree-of-freedom nonlinear systems by a Galerkin technique. J. Appl. Mech. 2003, 70, 708–714. [Google Scholar] [CrossRef]
- Merigaud, A.P.L.; Ringwood, J.V. A non-linear frequency-domain approach for numerical simulation of wave energy converters. IEEE Trans. Sustain. Energy 2017, 9, 86–94. [Google Scholar] [CrossRef]
- Merigaud, A.; Ringwood, J.V. Non-Linear Frequency-Domain WEC Simulation: Numerical Case Studies and Practical Issues. In Proceedings of the 12th European Wave and Tidal Energy Conference, Cork, Ireland, 27 August–1 September 2017. [Google Scholar]
- Novo, R.; Bracco, G.; Sirigu, S.A.; Mattiazzo, G.; Mérigaud, A.; Ringwood, J.V. Non Linear Simulation of a Wave Energy Converter With Multiple Degrees of Freedom Using a Harmonic Balance Method. In Proceedings of the ASME 2018 37th International Conference on Ocean, Offshore and Arctic Engineering, Madrid, Spain, 17–22 June 2018. [Google Scholar]
- Mérigaud, A.; Ringwood, J.V. Improving the computational performance of nonlinear pseudospectral control of wave energy converters. IEEE Trans. Sustain. Energy 2017, 9, 1419–1426. [Google Scholar] [CrossRef]
- Wei, Y.; Barradas-Berglind, J.J.; Almuzakki, M.Z.; van Rooij, M.; Wang, R.; Jayawardhana, B.; Vakis, A.I. A Fourier Approximation Method for the Multi-Pump Multi-Piston Power Take-Off System. In Proceedings of the ASME 2018 37th International Conference on Ocean, Offshore and Arctic Engineering, Madrid, Spain, 17–22 June 2018. [Google Scholar]
- Wei, Y.; Bechlenberg, A.; van Rooij, M.; Jayawardhana, B.; Vakis, A. Modelling of a wave energy converter array with a nonlinear power take-off system in the frequency domain. Appl. Ocean Res. 2019, 90, 101824. [Google Scholar] [CrossRef]
- Mérigaud, A.; Ringwood, J.V. Power production assessment for wave energy converters: Overcoming the perils of the power matrix. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2018, 232, 50–70. [Google Scholar] [CrossRef]
- Budal, K.; Falnes, J. A resonant point absorber of ocean-wave power. Naure 1975, 256, 478–479. [Google Scholar]
- Todalshaug, J.H. Practical limits to the power that can be captured from ocean waves by oscillating bodies. Int. J. Mar. Energy 2013, 3, e70–e81. [Google Scholar] [CrossRef]
- Kofoed, J.P.; Folley, M. Determining mean annual energy production. In Numerical Modelling of Wave Energy Converters; Elsevier: Amsterdam, The Netherlands, 2016; pp. 253–266. [Google Scholar]
- Vaughan, S.; Ferreira, C. Determining Structural and Hydrodynamic Loads. In Numerical Modelling of Wave Energy Converters; Elsevier: Amsterdam, The Netherlands, 2016; pp. 267–277. [Google Scholar]
- Drummen, I.; Wu, M.; Moan, T. Numerical and experimental investigations into the application of response conditioned waves for long-term nonlinear analyses. Mar. Struct. 2009, 22, 576–593. [Google Scholar] [CrossRef]
- Kim, D.H. Design Loads Generator: Estimation of Extreme Environmental Loadings for Ship and Offshore Applications. Ph.D. Thesis, University of Michigan, Ann Arbor, MI, USA, 2012. [Google Scholar]
- Ransley, E.; Greaves, D.; Raby, A.; Simmonds, D.; Hann, M. Survivability of wave energy converters using CFD. Renew. Energy 2017, 109, 235–247. [Google Scholar] [CrossRef]
- Edwards, S.J.; Coe, R.G. The Effect of Environmental Contour Selection on Expected Wave Energy Converter Response. J. Offshore Mech. Arct. Eng. 2019, 141, 011901. [Google Scholar] [CrossRef]
- Harnois, V.; Thies, P.; Johanning, L. On peak mooring loads and the influence of environmental conditions for marine energy converters. J. Mar. Sci. Eng. 2016, 4, 29. [Google Scholar] [CrossRef]
- Yu, Y.H.; Van Rij, J.; Coe, R.; Lawson, M. Preliminary wave energy converters extreme load analysis. In Proceedings of the ASME 2015 34th International Conference on Ocean, Offshore and Arctic Engineering, St. John’s, NL, Canada, 31 May–5 June 2015. [Google Scholar]
- Coe, R.G.; Neary, V.S.; Lawson, M.; Yu, Y.; Weber, J. Extreme Conditions Modeling Workshop Report; Technical Report; National Renewable Energy Lab. (NREL): Golden, CO, USA, 2014. [Google Scholar]
- Van Rij, J.; Yu, Y.H.; Coe, R.G. Design load analysis for wave energy converters. In Proceedings of the ASME 2018 37th International Conference on Ocean, Offshore and Arctic Engineering, Madrid, Spain, 17–22 June 2018. [Google Scholar]
- Quon, E.; Platt, A.; Yu, Y.H.; Lawson, M. Application of the most likely extreme response method for wave energy converters. In Proceedings of the ASME 2016 35th International Conference on Ocean, Offshore and Arctic Engineering, Busan, Korea, 19–24 June 2016. [Google Scholar]
- Dias, F.; Ghidaglia, J.M. Slamming: Recent progress in the evaluation of impact pressures. Annu. Rev. Fluid Mech. 2016, 50, 243–273. [Google Scholar] [CrossRef]
- Child, B. Semi-analytical Array Models. In Numerical Modelling of Wave Energy Converters: State-of-the-Art Techniques for Single Devices and Arrays; Elsevier: Amsterdam, The Netherlands, 2016; pp. 165–190. [Google Scholar]
- Troch, P.; Stratigaki, V. Phase-resolving wave propagation array models. In Numerical Modelling of Wave Energy Converters: State-of-the-Art Techniques for Single Devices and Arrays; Elsevier: Amsterdam, The Netherlands, 2016; pp. 191–216. [Google Scholar]
- Folley, M. Phase-Averaging Wave Propagation Array Models. In Numerical Modelling of Wave Energy Converters: State-of-the-Art Techniques for Single Devices and Arrays; Elsevier: Amsterdam, The Netherlands, 2016; pp. 217–225. [Google Scholar]
- Choi, Y.; Malenica, Š.; Bouscasse, B.; Seng, S.; Monroy, C.; Gentaz, L.; Ferrant, P. Preliminary study on coupling of viscous and potential flow using domain decomposition and relaxation zones. In Proceedings of the 33rd International Workshop on Water Waves and Floating Bodies (IWWWFB), Guidel-Plages, France, 4–7 April 2018. [Google Scholar]
- Engsig-Karup, A.P.; Madsen, M.G.; Glimberg, S.L. A massively parallel GPU-accelerated model for analysis of fully nonlinear free surface waves. Int. J. Numer. Methods Fluids 2012, 70, 20–36. [Google Scholar] [CrossRef]
- Glimberg, S.L.; Engsig-Karup, A.P.; Madsen, M.G. A fast GPU-accelerated mixed-precision strategy for fully nonlinear water wave computations. In Numerical Mathematics and Advanced Applications 2011; Springer: Cham, Switzerland, 2013; pp. 645–652. [Google Scholar]
- Buttari, A.; Dongarra, J.; Langou, J.; Langou, J.; Luszczek, P.; Kurzak, J. Mixed precision iterative refinement techniques for the solution of dense linear systems. Int. J. High Perform. Comput. Appl. 2007, 21, 457–466. [Google Scholar] [CrossRef]
- Glimberg, S.L.; Engsig-Karup, A.P.; Olson, L.N. A massively scalable distributed multigrid framework for nonlinear marine hydrodynamics. Int. J. High Perform. Comput. Appl. 2019, 33, 855–868. [Google Scholar] [CrossRef]
















{kind=link}
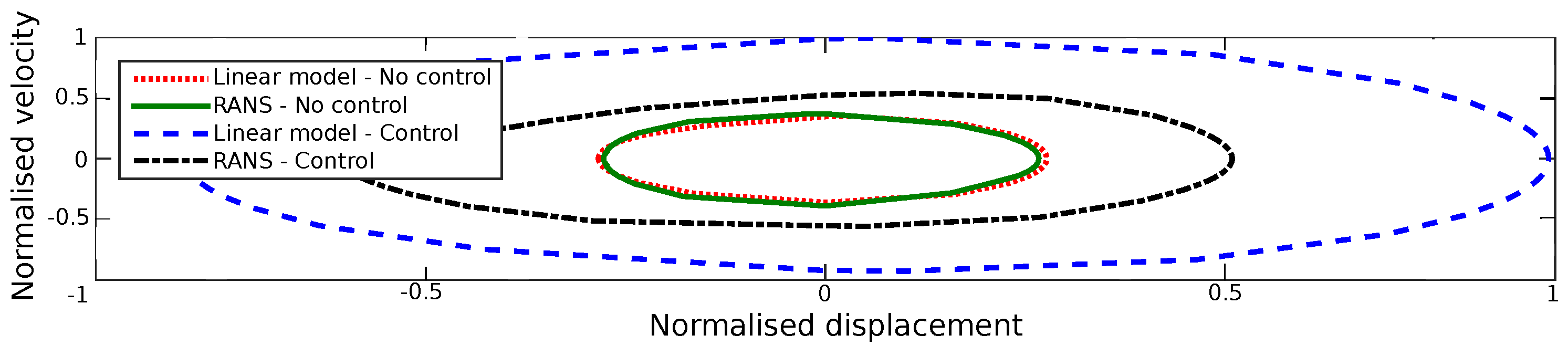{kind=link}
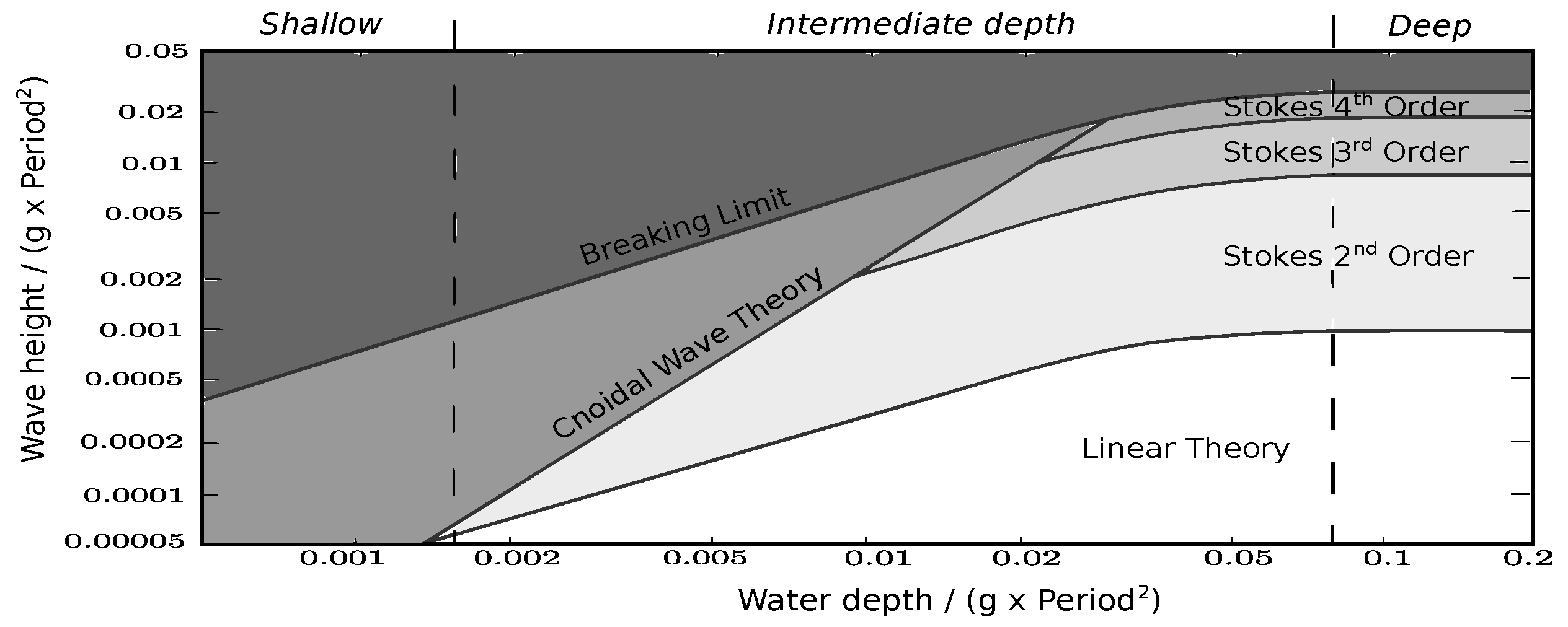{kind=link}
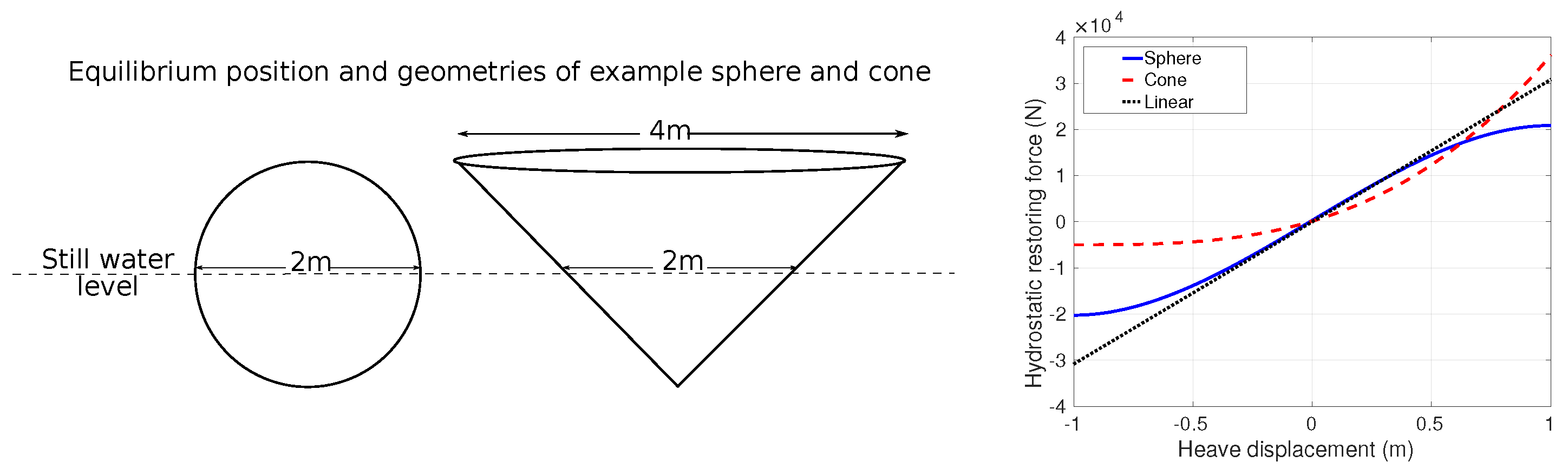{kind=link}
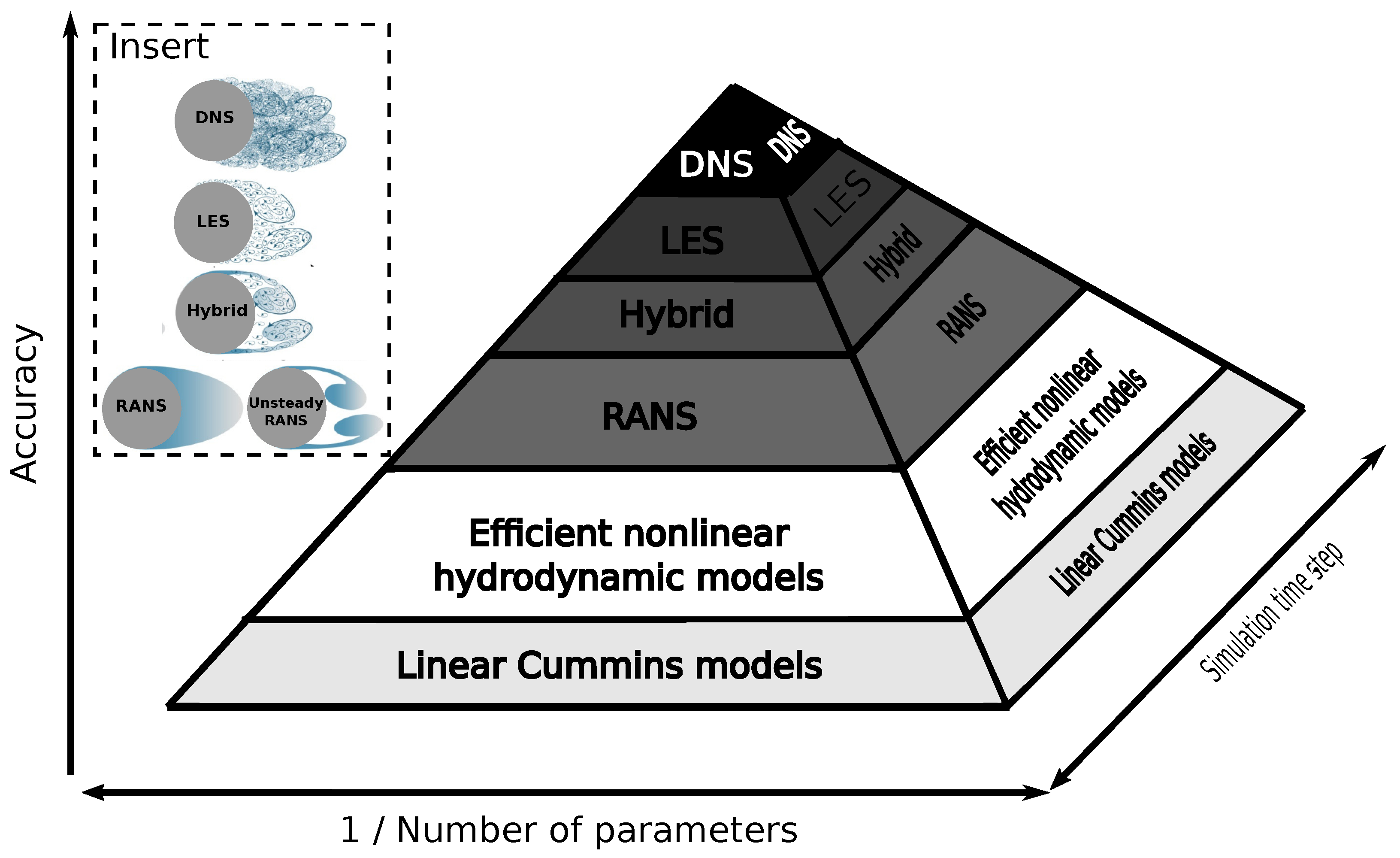{kind=link}
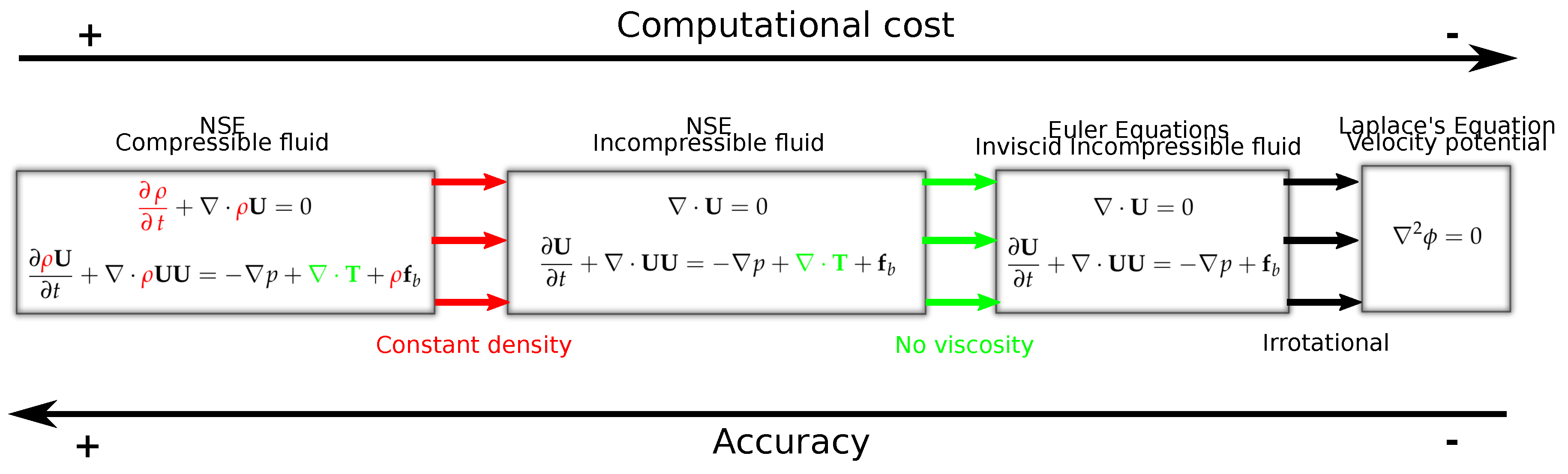{kind=link}
{kind=link}
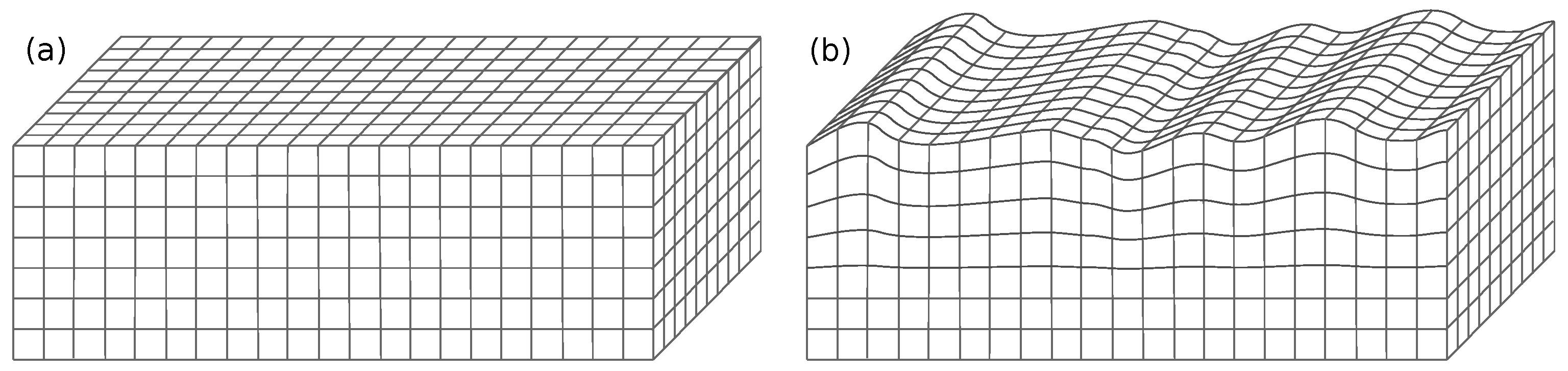{kind=link}
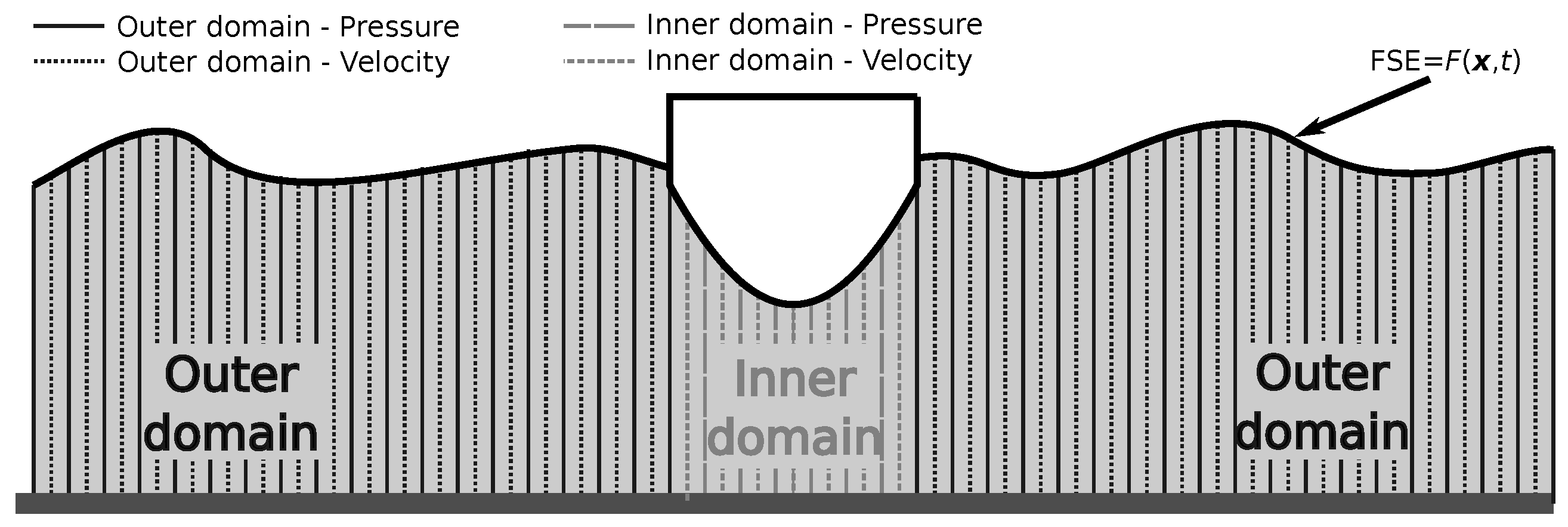{kind=link}
{kind=link}
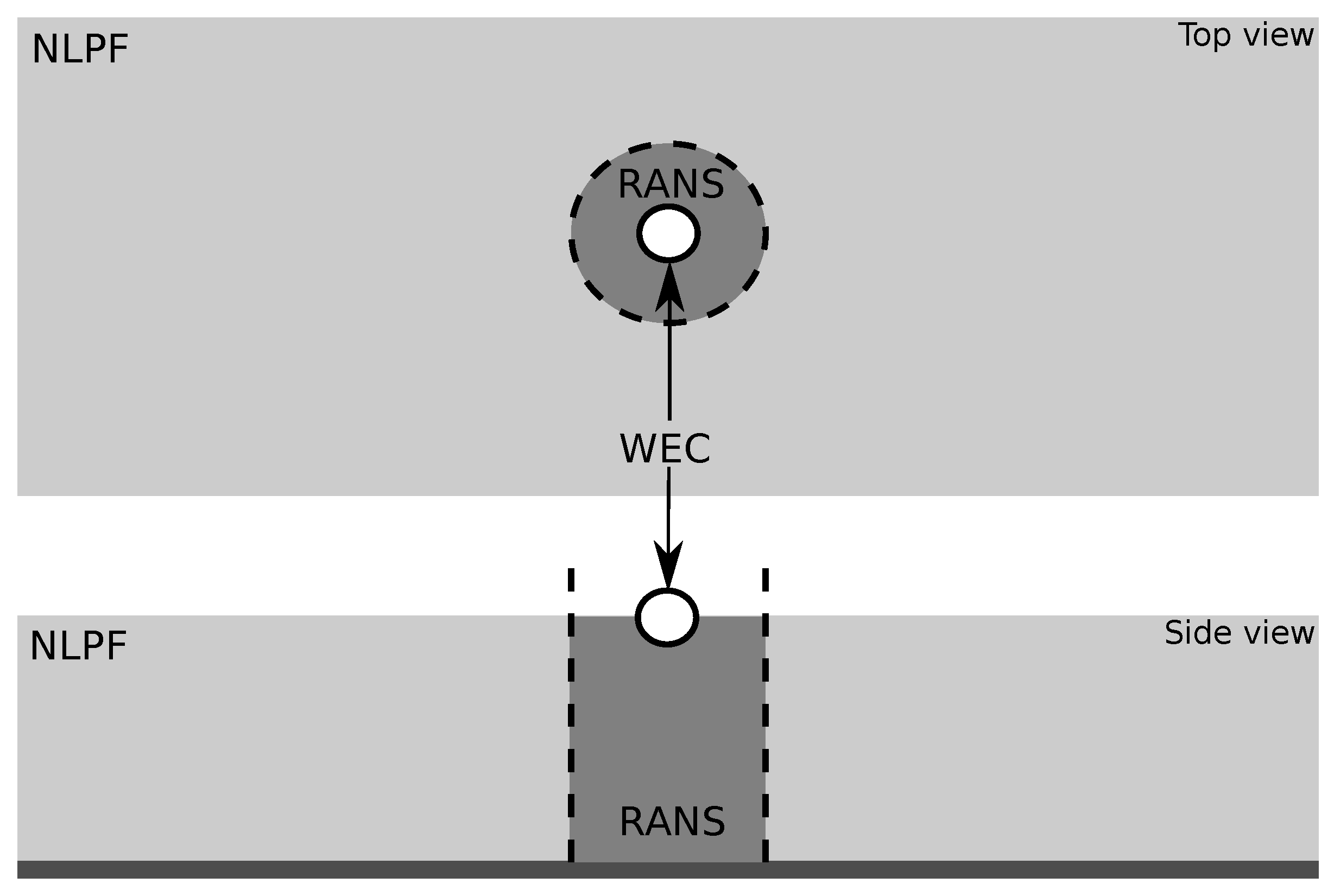{kind=link}
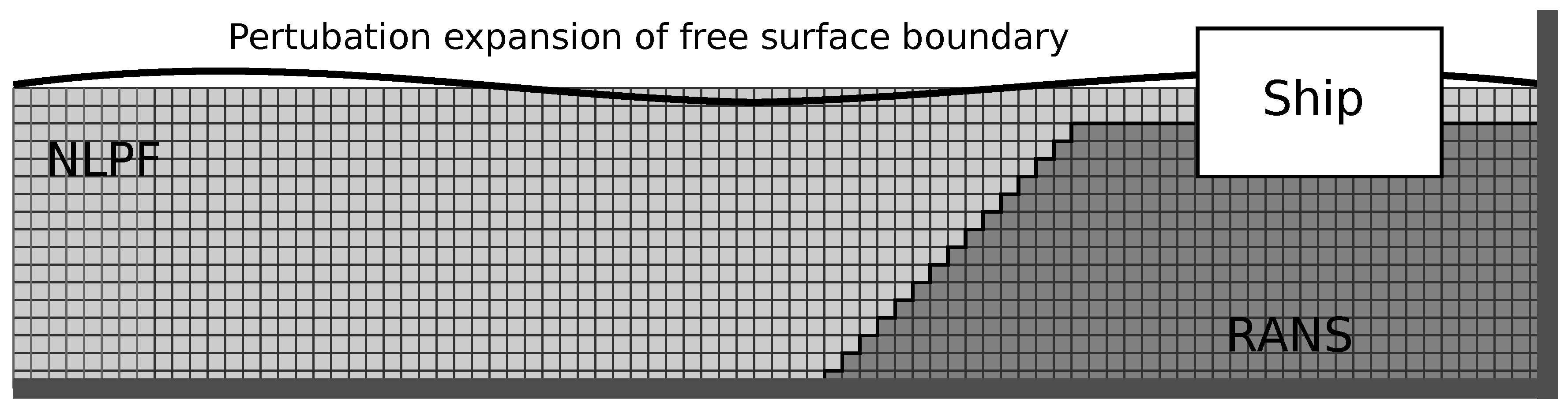{kind=link}
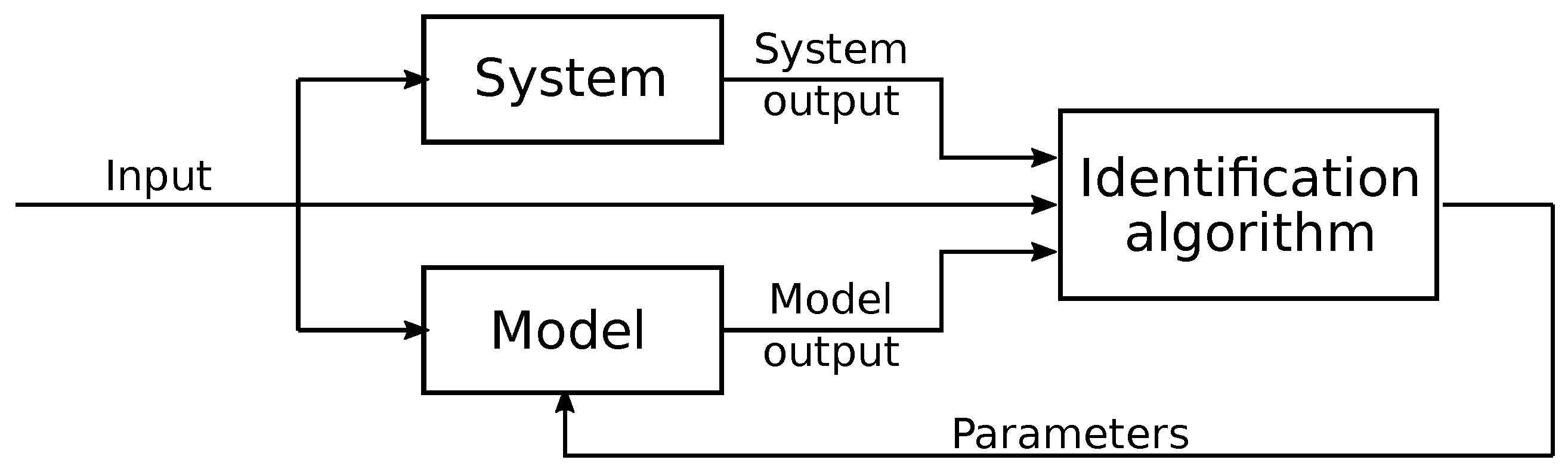{kind=link}
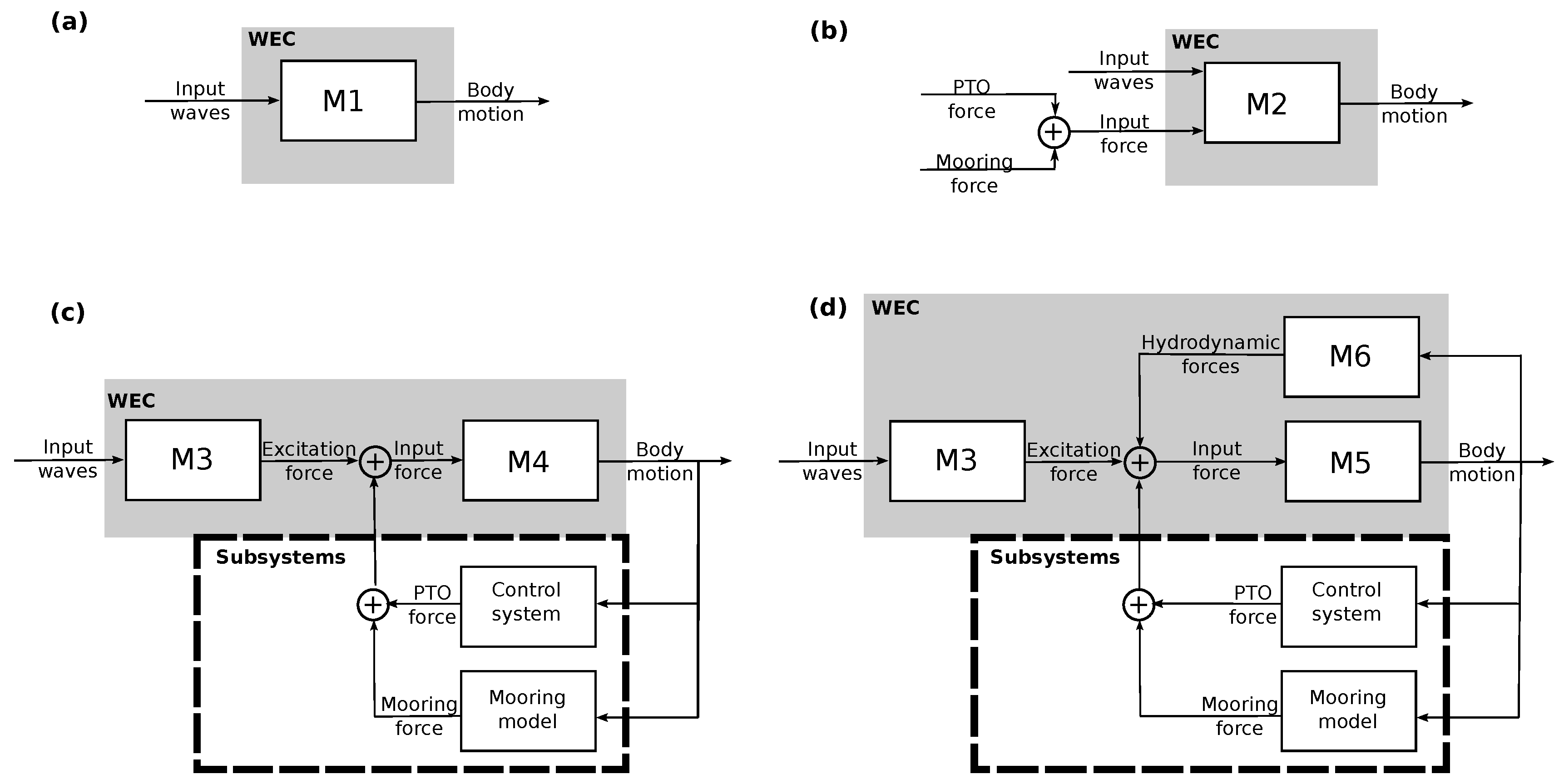{kind=link}
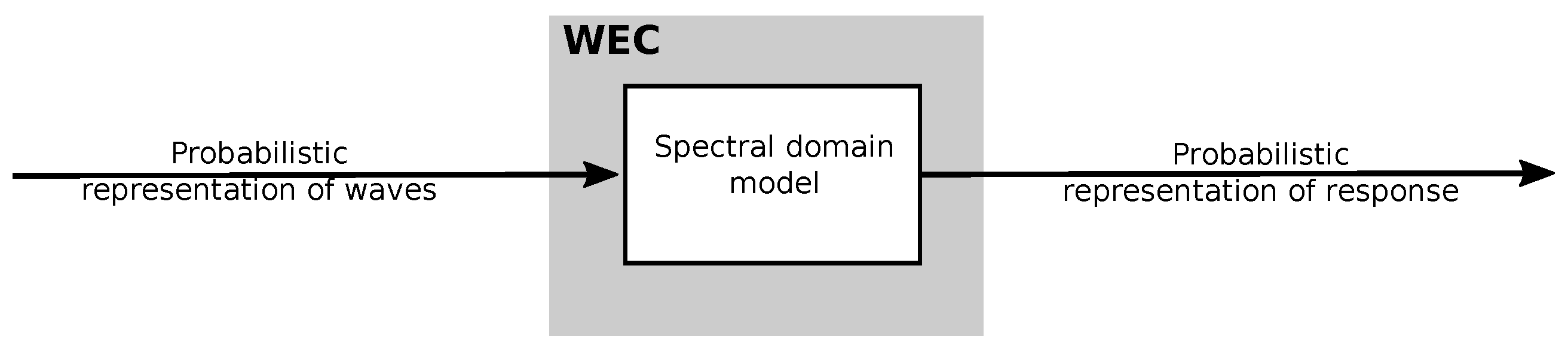{kind=link}
| Ref. | Software | WEC Type | Analysis |
|---|---|---|---|
| [64] | AMAZON-3D | Manchester Bobber | Extreme wave loadings |
| [65] | AMAZON-3D | Manchester Bobber | Slamming |
| [66] | AMAZON-3D | Manchester Bobber | Survivability design scenarios |
| [67] | OpenFOAM | Wave-Dragon | Over-topping |
| [34] | OpenFOAM | HPA | Investigation of parametric resonance |
| [47] | OpenFOAM | HPA | Investigation of scale effects |
| Ref. | Method | WEC Type | Analysis |
|---|---|---|---|
| [69] | Cauchy’s Eqn | Salter’s Duck (2D) | Capsizing in extreme waves |
| [70] | Cauchy’s Eqn | Submerged wave lens | Focusing of wave energy |
| [72] | BEM | OWC (2D) | Geometry analysis |
| [73] | BEM | Land-based OWC (2D) | Validation against RANS and experiments |
| [74] | HOBEM | Bristol Cylinder (2D) | Proof of modeling concept |
| [75] | BEM | Floating OWC (2D) | Using the acceleration potential method |
| [76] | BEM | Floating OWC (2D) | Including viscosity to NLPF model |
| [77] | BEM | Floating OWC (2D) | Evaluating sharp versus round corner geometry |
| [29] | HOBEM | Fixed OWC (2D) | Investigating hydrodynamic performance |
| [78] | HOBEM | Submerged cylinder (2D) | Proof of modeling concept |
| [79] | BEM | Rolling-cams (2D) | Including viscosity to NLPF model |
| [80] | HOBEM | Bristol Cylinder (2D) | Validation against experiments |
| [81] | BEM | Fixed OWC | Investigation of stepped-bottom OWC |
| [82] | BEM | HPA (Cylinder) | Effect of wave steepness |
| [43] | HOBEM | Fixed OWC (2D) | Including viscosity to NLPF model |
| [83] | BEM | OSC (2D) | Hydrodynamic performance for large motion |
| [84] | HOBEM | OSC | Performance in waves and currents |
| [85,86] | BEM | HPA (Cylinder) | Latching control/Wave-body-PTO interaction |
| Ref. | Method | WEC Type | Analysis |
|---|---|---|---|
| [143] | Boussinesq (SEM) | HPA | Comparison against linear and RANS models |
| [144,145,146] | Boussinesq (SEM) | HPA (2D) | Verification and validation of model |
| [147,148] | Congested shallow water | HPA (2D) | Verification and validation of model |
| [149,150] | Non-hydrostatic flow | Submerged PA | Simulate interactions between nonlinear wave field and WEC over coastal scale regions |
| [151] | Non-hydrostatic flow | Submerged PA | Parametric instability |
| [152] | Non-hydrostatic flow | Submerged PA | Geotechnical stability of the moorings |
| Ref. | Method | WEC Type | Analysis |
|---|---|---|---|
| [163] | Perturbation | OWC | Nonlinear free surface effects |
| [164] | 2nd Order PF | Tight moored piston-like WEC | Performance of 2-body system with moonpool |
| [165] | WSA | PA with pendulum PTO | Powering small scale data buoys |
| [166] | 2nd Order PF | 2 × HPA (Hemisphere) | Array interaction |
| [167] | 2nd Order PF | Fixed cylindrical OWC | Effect of weakly nonlinear waves on efficiency |
| [168] | WSA | HPA (Sphere) | Comparison against linear and NLFK models |
| [169] | 2nd Order PF | 4 × HPA (Cylinder) | Trapped modes in arrays |
| [170] | WSA | CETO | Coupling with multi-body mechanical solver |
| [171] | WSA | Wavestar | Comparison against linear and NLFK models |
| [172] | WSA | CETO and WaveRoller | Comparison against linear models |
| [173] | 2nd Order PF | OSC array | Sub-harmonic and higher-order effects |
| [174] | 2nd Order PF | Curved gate (2D) | Nonlinear effects of the curved surface |
| [175] | 2nd Order PF | Curved OSC array | Nonlinear effects of the curved surface |
| [176,177] | 3rd Order PF | Curved gate array | Nonlinear effects of the curved surface |
| Ref. | WEC Type | Analysis |
|---|---|---|
| [188] | OSC | Improved model accuracy for large pitch angles |
| [189] | OSC | Improved model accuracy for large pitch angles |
| [190] | Submerged HPA | Demonstration of method |
| [191] | Reconfigurable OSC | Modeling change in hydrodynamics for moving control surfaces |
| [35] | HPA | Modeling the occurrence of parametric pitch resonance |
| [192] | OSC | Improved model accuracy for large pitch angles |
| Ref. | Method | WEC Type | Analysis |
|---|---|---|---|
| [228,229] | FD to TD PF | Pico OWC | Efficient TD simulations |
| [230] | Wave model to PF | Array (HPA) | Wave interactions with WEC array |
| [231] | Wave model to RANS | OSC | Modeling real bathymetry |
| [232] | PF to I.RANS to C.RANS | OSC | Slamming loads |
| [233,234] | Wave model to PF | Array | Multiple WECs in variable bathymetry |
| [235,236] | Wave model to PF | Array (OSC) | Wake effects in arrays |
| [237,238] | Wave model to PF | Multiple Arrays (HPAs) | Impact of WEC array separation distance |
| [239] | Wave model to PF | Arrays (HPAs and OSCs) | Comparison of far-field effects |
| [240,241] | Wave model to PF | Array (HPAs) | Validation of model |
| [242,243,244] | NLPF to SPH | HPA | Proof of concept |
| [245] | NLPF to SPH | OWC | Demonstration of method |
| [246] | NLPF to RANS | HPA | Blind comparison test [247] |
| Ref. | Parameterization | Data | WEC Type | Analysis |
|---|---|---|---|---|
| [300] [193] | State-space | RANS | HPA | ID of amplitude dependant equivalent linear models |
| [301] | State-space | RANS | OWC | Heave motion in OWC chamber |
| [204] | Cubic polynomial | PWT | Wavestar | Nonlinear restoring force |
| [302] [303] | Hammerstein- Weiner Volterra | Thermo- dynamics | OWC | Air pressure fluctuations inside OWC chamber |
| [304] | NARX | RANS | HPA | Nonlinear hydrostatic restoring force |
| [305] | ANN | RANS | HPA | Optimization of input/out data for SID |
| [306] | Volterra theory | PWT | OWSC | ID of accurate models from PWT data |
| [307] | ARX, Hammerstein, KGP | RANS | HPA | Nonlinear excitation force |
| [308] | ARX, KGP, ANN | RANS | HPA | SID of nonlinear discrete-time models |
| [309] | Grey- and black-box | PWT | HPA | Investigation of SID techniques |
| [310] [221] | Pseudo-spectral | RANS | HPA | Online ID of time-varying equivalent linear models for adaptive control |
| [311] | Multi regression model | CFD + PWT | OWC | Empirical model design tool |
| [312] | ARX, KGP | PWT | Wavestar | Nonlinear model ID from PWT data |
| Ref. | Method | WEC Type | Analysis |
|---|---|---|---|
| [318] | FD | OWC | Optimization of turbine size and rotational speed |
| [220] | SD | OSWC | Modeling vortex shedding and large amplitude effects |
| [321] | FD | HPA | Geometry, mass distribution, and mooring design optimization |
| [323] | SD | HPA (Array) | Modeling arrays and Coulomb friction |
| [324] | SD | OWC | Validation of model against tank data |
| [325] | SD | OSWC | Accommodate nonlinear WEC dynamics in an optimal controller |
| [326] | SD | OSWC | Investigation of controllable surfaces |
| [319] | FD | Spar buoy OWC | Statistical values of device dynamics and power output for an array |
| [327] | SD | HPA (Sphere) | Modeling nonlinear hydrostatic stiffness |
| [328] | SD | Submerged PA | Include nonlinear viscous drag and compare with other methods |
| [329] | PC | HPA | Predicting long term extreme loads |
| [330] | PC | HPA | Uncertainty quantification |
| [331,332] | SD | HPA/OWC | Statistical linearization of nonlinearities |
| [320] | FD | Spar buoy OWC | Design optimization |
| Ref. | WEC Type | Analysis |
|---|---|---|
| [340] | OSC + HPA (Sphere) | Demonstration of modeling approach |
| [341] | HPA (Sphere) | Model’s ability to handle different nonlinearities |
| [343] | OSC | Computationally efficient control |
| [346] | OSC + HPA (Sphere) | Effect of spectral shape of wave spectrum on power output estimates |
| [342] | ISWEC | Comparison against MDoF time-domain models |
| [344] | Ocean Grazer | PTO system performance of a single device |
| [345] | Ocean Grazer | PTO system performance for full array |
| Application | Time-Span | Spatial Domain | Hydrodynamic Resolution |
|---|---|---|---|
| Section 6.1.1 WEC operation | Vast—interested in characterizing and optimizing the device performance across all sea states at a given location | Small—local effects only | High—accurate modeling required for assessment of device performance |
| Section 6.1.2 WEC survival | Small—interested in the subset of all sea states, and wave series within those sea states, which give rise to maximum loads | Small—local effects only | Very high—must be able to capture the very nonlinear waves and WSI associated with extreme wave conditions |
| Section 6.1.3 WEC farms | Medium—time averaged interactions between the wave farm and the environment | Very large—must simulate the entire domain of the wave farm | Medium—interested in the average effects of the interactions between fully designed WECs in arrays/farms |
| Software | References | Software | References |
|---|---|---|---|
| OpenFOAM | [9,26,27,34,35,45,46,47,54,56,57,61,67,125,139,143,146,159,190,193,217,221,232,246,247,258,259,260,261,262,265,266,267,268,269,270,272,273,274,275,277,284,300,301,304,305,307,308,310,314,353,364] | SPHysics | [242,243,244,245] |
| Nemoh | [172,179,189,190,192,205,206,216,235,236,237,238,239,240,241,249,250,344,346] | Gmsh | [123,180] |
| OceanWave3D | [129,131,132,134,242,243,244,245,250,266,268] | Grid2Grid | [264,265] |
| WEC-Sim | [192,195,330,358,359] | ExaFMM | [91] |
| SWASH | [149,150,151,152,162] | Palabos | [53] |
| HOS Ocean/NWT | [100,103,132,201] | Nektar++ | [120] |
| Strengths | Limitations | |
|---|---|---|
| Euler Equations | • Can simulate wave breaking, green water etc. • Simulates both air and water phases • Can include drag and vortex effects • Implementable in CFD solver frameworks e.g., OpenFOAM | • Computationally expensive • Waves must be solved and propagated to WEC location |
| FNPF | • Large amplitude waves and body motions permitted • Currently the focus of much research and development • Flexible/deformable bodies can be easily handled by FEM/SEM • Well suited for use in domain decomposition with RANS | • Computationally feasible with adequate hardware • Waves must be solved and propagated to WEC location • Design of efficient and flexible methods to handle both the nonlinear wave propagation and wave-body interactions is non-trivial, as FNPF NWTs have traditionally been designed to focus on one or the other. |
| Shallow water | • Efficiency is gained by eliminating/reducing the vertical dimension and by representing the free-surface as a single-valued function • Valid in the nearshore | • While this method has been shown to work effectively for floating bodies, it is unclear if this could be applicable to submerged bodies • Loses validity in the deep water • Waves must be solved and propagated to WEC location |
| Weak scatterer | • Large body motions • Nonlinear steep incident waves • Incident wave does not need to be solved and propagated • Mesh only needs to be refined close to the WEC and large cells can be used elsewhere | • Valid for small perturbed waves • Computational expense in updating the computational domain at each time step, like FNPF |
| WNPF | • FD possible • Efficient time-domain simulations since the hydrodynamic coefficient matrices are the same for every time-step, thus only need to be set-up and inverted once. • Incident wave does not need to be solved and propagated | • Although an improvement upon LPF, this method still contains limitations on the wave steepness and amplitude of body motion |
| Time-varying parameters | • Computationally efficient • Can precompute the required hydrodynamic coefficients offline beforehand and use look-up tables/interpolation during simulation • Can input wave signal directly, rather than generated at boundary and propagated to the WEC | • Body nonlinear only, with linear assumptions still applied on the input waves • Might only be suitable for NLFK forces, since implementation of time-varying linear models for radiation and diffraction forces is unclear due to memory effects and convolution integrals in time. |
| NLFK | • Computationally efficient • Can consider nonlinear/steep waves • Can input wave signal directly, rather than generated at boundary and propagated to the WEC | • Only useful for WEC geometries for which the NLFK forces are significant • Not applicable for fully submerged devices • Linear wave radiation and diffraction forces |
| Domain decomposition | • Can provide high fidelity WSI equivalent to RANS and better wave propagation modeling, for less computational effort than RANS • Can be used for extreme and survival conditions • Can be used for large spatial scales considering WEC arrays and wave farms | • Computationally expensive • Two-way coupling methods not yet mature/widely demonstrated |
| Parametric models identified from data | • Computationally efficient time-domain simulations with fidelity equivalent to the data used to identify the model • Can input wave signal directly, rather than generated at boundary and propagated to the WEC | • Requires high fidelity training data set spanning the frequency and amplitude ranges • Models may not accurately extrapolate to input conditions outside the range which they were trained upon |
| Spectral Domain | • Extremely fast calculation of statistical values, such as mean annual power output etc. | • No temporal responses • Unable to model monochromatic waves • Only valid for Gaussian inputs • The accuracy of the SD model decreases with the deviation from a Gaussian response, therefore unsuited to some nonlinear forces, such as abrupt end-stop collisions, latching control etc. |
| Polynomial chaos | • Can test wide ranges of design variables, without simplifying the physics involved. | • Restricted to relatively low number of dimensions in the parameter space (curse of dimensionality) • Smoothness restrictions on the quantity of interest |
| NLFD | • Can produce time-domain results an order of magnitude faster than traditional Cummins equation methods • Can input wave signal directly, rather than generated at boundary and propagated to the WEC | • Linear assumption on input waves • WEC outputs must remain smooth, therefore cannot handle abrupt end-stop collisions, latching control etc • Periodic steady-state responses only |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Davidson, J.; Costello, R. Efficient Nonlinear Hydrodynamic Models for Wave Energy Converter Design—A Scoping Study. J. Mar. Sci. Eng. 2020, 8, 35. https://doi.org/10.3390/jmse8010035
Davidson J, Costello R. Efficient Nonlinear Hydrodynamic Models for Wave Energy Converter Design—A Scoping Study. Journal of Marine Science and Engineering. 2020; 8(1):35. https://doi.org/10.3390/jmse8010035
Chicago/Turabian StyleDavidson, Josh, and Ronan Costello. 2020. "Efficient Nonlinear Hydrodynamic Models for Wave Energy Converter Design—A Scoping Study" Journal of Marine Science and Engineering 8, no. 1: 35. https://doi.org/10.3390/jmse8010035
APA StyleDavidson, J., & Costello, R. (2020). Efficient Nonlinear Hydrodynamic Models for Wave Energy Converter Design—A Scoping Study. Journal of Marine Science and Engineering, 8(1), 35. https://doi.org/10.3390/jmse8010035