Application of Shielding Coils in Underwater Wireless Power Transfer Systems


Abstract
1. Introduction
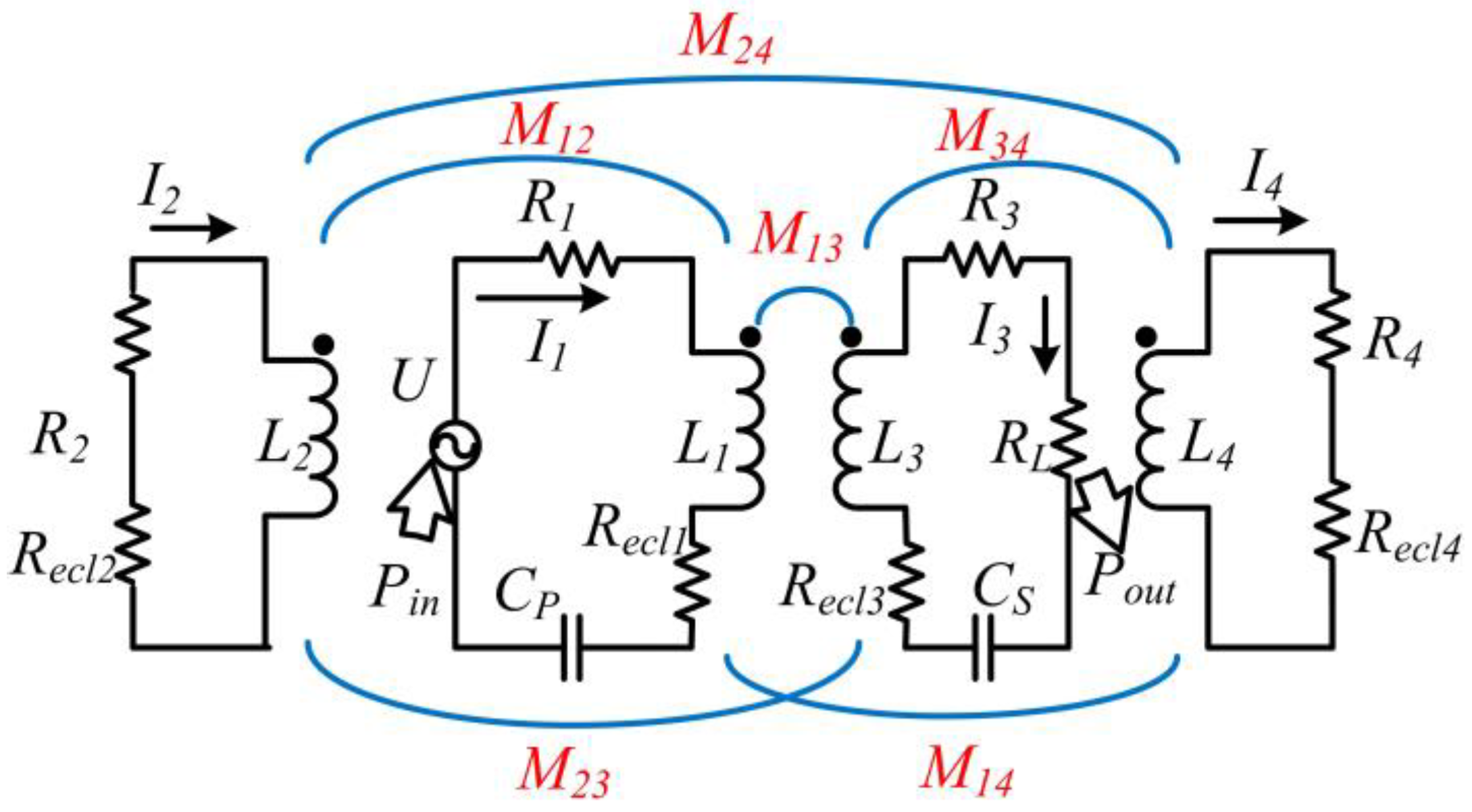
2. Circuit Model Analysis
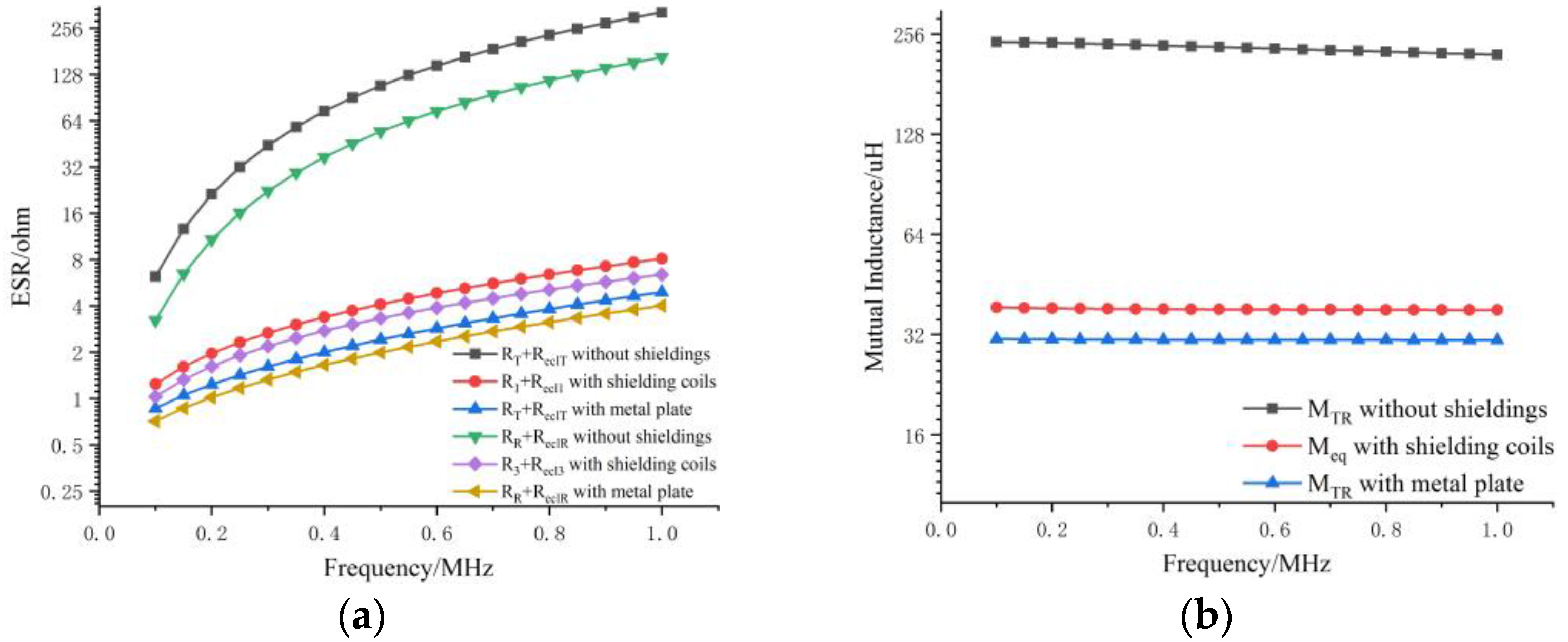
3. Simulations and Analysis
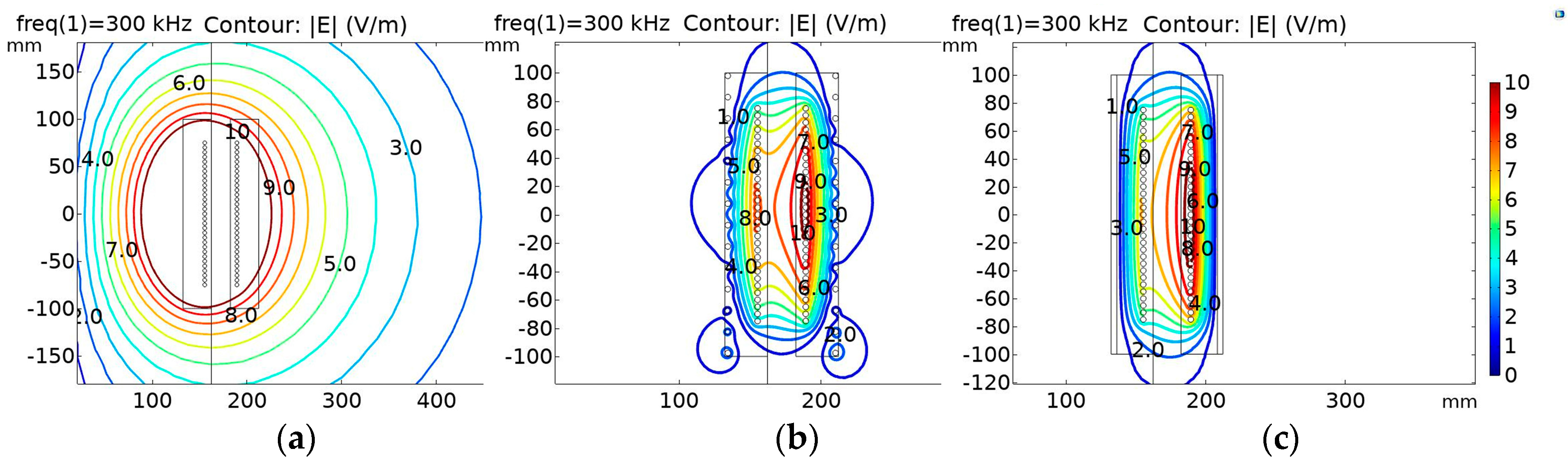
3.1. Nonmetallic Shell
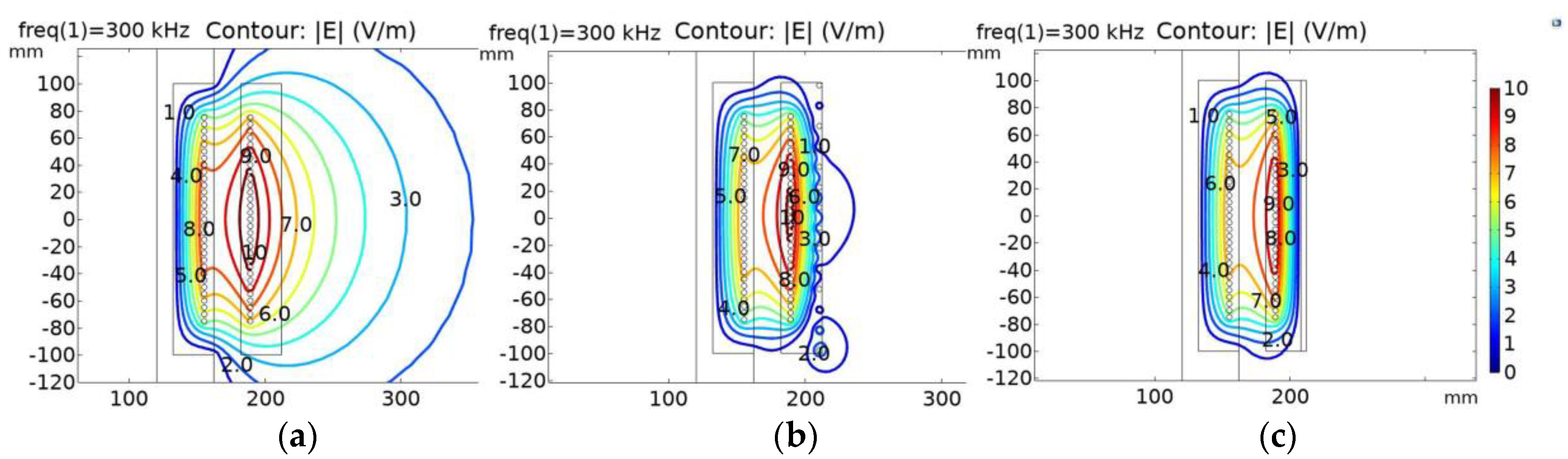
3.2. Metallic Shell
4. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Ahmed, A.M.E.; Duan, W.-Y. Overview on the Development of Autonomous Underwater Vehicles. (AUVs). J. Ship Mech. 2016, 768–787. [Google Scholar] [CrossRef]
- Li, Y.; Jiang, Y.; Cao, J.; Wang, B.; Li, Y. AUV docking experiments based on vision positioning using two cameras. Ocean Eng. 2015, 110, 163–173. [Google Scholar] [CrossRef]
- Wu, L.; Li, Y.; Su, S.; Yan, P.; Qin, Y. Hydrodynamic analysis of AUV underwater docking with a cone-shaped dock under ocean currents. Ocean Eng. 2014, 85, 110–126. [Google Scholar] [CrossRef]
- Zhang, T.; Li, D.; Yang, C. Study on impact process of AUV underwater docking with a cone-shaped dock. Ocean Eng. 2017, 130, 176–187. [Google Scholar] [CrossRef]
- Vincent, D.; Sang, P.H.; Williamson, S.S. Feasibility study of hybrid inductive and capacitive wireless power transfer for future transportation. In Proceedings of the 2017 IEEE Transportation Electrification Conference and Expo (ITEC), Chicago, IL, USA, 22–24 June 2017. [Google Scholar]
- Guo, Y.; Wang, L.; Zhang, J.; Zhang, Y.; Zhang, Y. A Research on Characteristics of Dynamic Wireless Charging System for Electric Vehicles. Qiche Gongcheng/Automot. Eng. 2017, 39, 642–647. [Google Scholar]
- Lu, M. Synergetic Attenuation of Stray Magnetic Field in Inductive Power Transfer. Ph.D. Thesis, Virginia Polytechnic Institute, Blacksburg, VA, USA, 2017. [Google Scholar]
- Le, K.; Yuli, H.U.; Wei, Z. Maximum power efficiency tracking on underwater magnetic resonant wireless power transfer system. Harbin Gongcheng Daxue Xuebao/J. Harbin Eng. Univ. 2017, 38, 829–835. [Google Scholar]
- Yan, Z.; Zhang, Y.; Song, B.; Zhang, K.; Kan, T.; Mi, C. An LCC-P Compensated Wireless Power Transfer System with a Constant Current Output and Reduced Receiver Size. Energies 2019, 12, 172. [Google Scholar] [CrossRef]
- Lin, M.; Li, D.; Yang, C. Design of an ICPT system for battery charging applied to underwater docking systems. Ocean Eng. 2017, 145, 373–381. [Google Scholar] [CrossRef]
- Kan, T.; Mai, R.; Mercier, P.P.; Mi, C.C. Design and Analysis of a Three-Phase Wireless Charging System for Lightweight Autonomous Underwater Vehicles. IEEE Trans. Power Electron. 2018, 33, 6622–6632. [Google Scholar] [CrossRef]
- Yan, Z.; Zhang, Y.; Kan, T.; Lu, F.; Zhang, K.; Song, B.; Mi, C.C. Frequency Optimization of a Loosely Coupled Underwater Wireless Power Transfer System Considering Eddy Current Loss. IEEE Trans. Ind. Electron. 2018, 66, 3468–3476. [Google Scholar] [CrossRef]
- Zhang, K.; Zhang, X.; Zhu, Z.; Yan, Z.; Member, S.; Song, B.; Mi, C.C. A New Coil Structure to Reduce Eddy Current Loss of WPT Systems for Underwater Vehicles. IEEE Trans. Veh. Technol. 2019, 68, 245–253. [Google Scholar] [CrossRef]
- Lee, I.G.; Kim, N.; Cho, I.K.; Hong, I.P. Design of a Patterned Soft Magnetic Structure to Reduce Magnetic Flux Leakage of Magnetic Induction Wireless Power Transfer Systems. IEEE Trans. Electromagn. Compat. 2017, 59, 1856–1863. [Google Scholar] [CrossRef]
- Yan, Z.; Song, B.; Zhang, K.; Wen, H.; Mao, Z.; Hu, Y. Eddy current loss analysis of underwater wireless power transfer systems with misalignments. AIP Adv. 2018, 8, 101421. [Google Scholar] [CrossRef]
- Yang, C.L.; Chang, C.K.; Lee, S.Y.; Chang, S.J.; Chiou, L.Y. Efficient four-coil wireless power transfer for deep brain stimulation. IEEE Trans. Microw. Theory Tech. 2017, 65, 2496–2507. [Google Scholar] [CrossRef]
- Zhang, J.; Yuan, X.; Wang, C.; He, Y. Comparative Analysis of Two-Coil and Three-Coil Structures for Wireless Power Transfer. IEEE Trans. Power Electron. 2016, 32, 341–352. [Google Scholar] [CrossRef]
- Nguyen, V.T.; Kang, S.H.; Choi, J.H.; Chang, W.J. Magnetic resonance wireless power transfer using three-coil system with single planar receiver for laptop applications. IEEE Trans. Consum. Electron. 2015, 61, 160–166. [Google Scholar] [CrossRef]
- Kiani, M.; Ghovanloo, M. The Circuit Theory Behind Coupled-Mode Magnetic Resonance-Based Wireless Power Transmission. IEEE Trans. Circuits Syst. I Regul. Pap. 2012, 59, 2065–2074. [Google Scholar] [CrossRef] [PubMed]
- Zhang, K.; Zhu, Z.; Du, L.; Song, B. Eddy Loss Analysis and Parameter Optimization of the WPT System in Seawater. J. Power Electron. 2018, 18, 778–788. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Quantity | Value |
|---|---|---|
| rline | Radius of line/mm | 2 |
| R1, R2, R3, R4 | Radius of coils 1, 2, 3 and 4/mm | 189, 210, 155, 134 |
| nT and nR | Turns of transmitter and receiver | 31 |
| Nshielding coil | Turns of shielding coils | 14 |
| d | Distance between two adjacent power transmission coils/mm | 5 |
| dshielding coil | Distance between two adjacent shielding coils/mm | 15 |
| μseawater, μcopper, μair, μaluminum, | Relative permeability for seawater, copper, air, aluminum | 1, 0.99990, 1, 1.00002 |
| σseawater, σcopper, σair, σaluminum, | Conductivity for seawater, copper, air, aluminum/(S/m) | 4.5, 5.998 × 107, 0, 3.77 × 107 |
| εseawater, εcopper, εair, εaluminum, | Relative permittivity for seawater, copper, air, aluminum | 81, 1, 1, 1 |
| ρcopper, ρaluminum | Density for copper, aluminum/(kg/m3) | 8.9 × 103, 2.7 × 103 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Song, B.; Mao, Z. Application of Shielding Coils in Underwater Wireless Power Transfer Systems. J. Mar. Sci. Eng. 2019, 7, 267. https://doi.org/10.3390/jmse7080267
Wang Y, Song B, Mao Z. Application of Shielding Coils in Underwater Wireless Power Transfer Systems. Journal of Marine Science and Engineering. 2019; 7(8):267. https://doi.org/10.3390/jmse7080267
Chicago/Turabian StyleWang, Yushan, Baowei Song, and Zhaoyong Mao. 2019. "Application of Shielding Coils in Underwater Wireless Power Transfer Systems" Journal of Marine Science and Engineering 7, no. 8: 267. https://doi.org/10.3390/jmse7080267
APA StyleWang, Y., Song, B., & Mao, Z. (2019). Application of Shielding Coils in Underwater Wireless Power Transfer Systems. Journal of Marine Science and Engineering, 7(8), 267. https://doi.org/10.3390/jmse7080267