Design and Experiment of Clamper Used in Antarctic Subglacial Bedrock Drilling

 ,
,
Abstract
:1. Introduction
2. Concept Design of the Clamper Device
3. Calculations on Key Parameters of Clamper
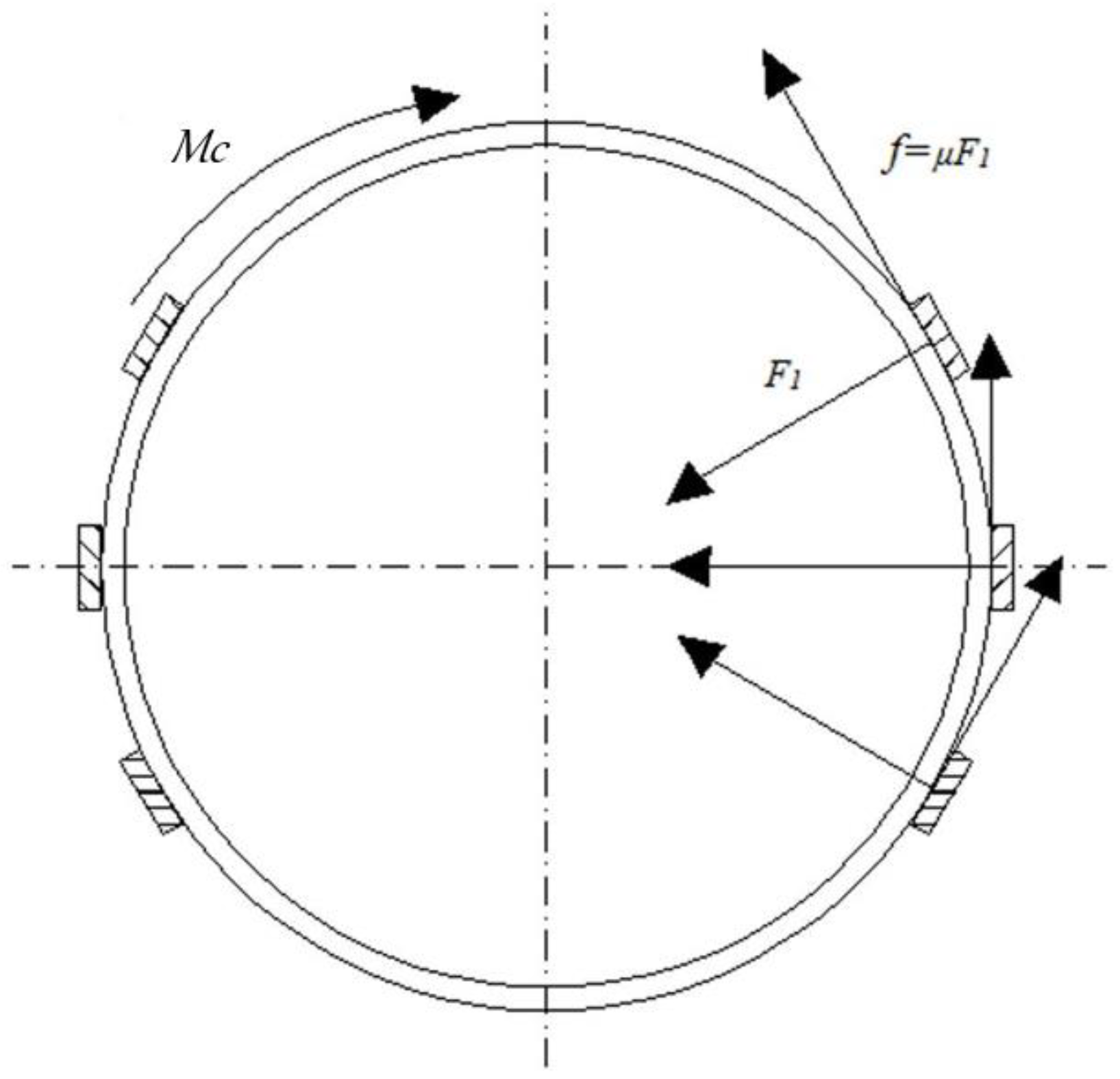
3.1. Clamping Torque of Clamper
3.2. Clamping Force of the Clamper
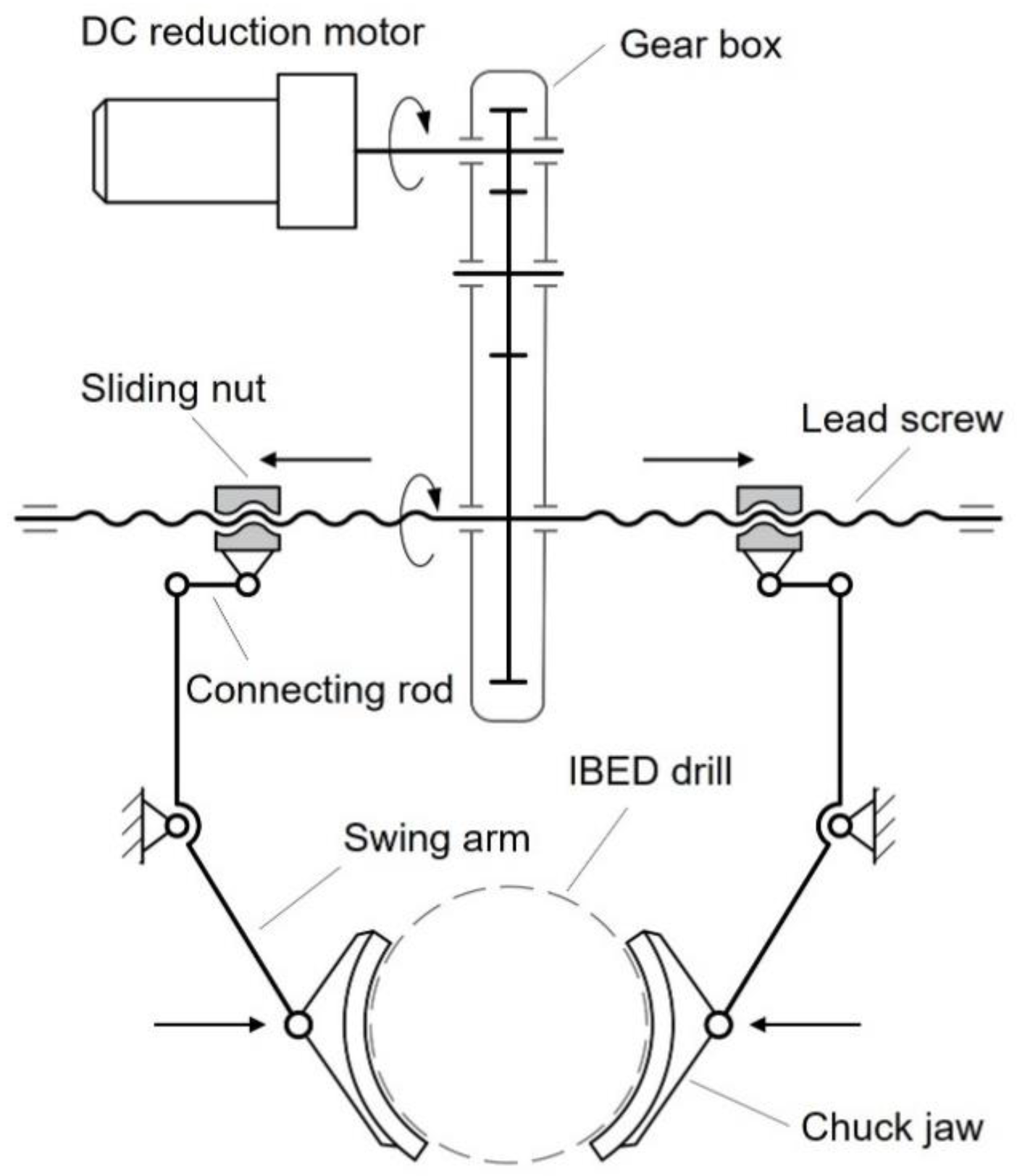
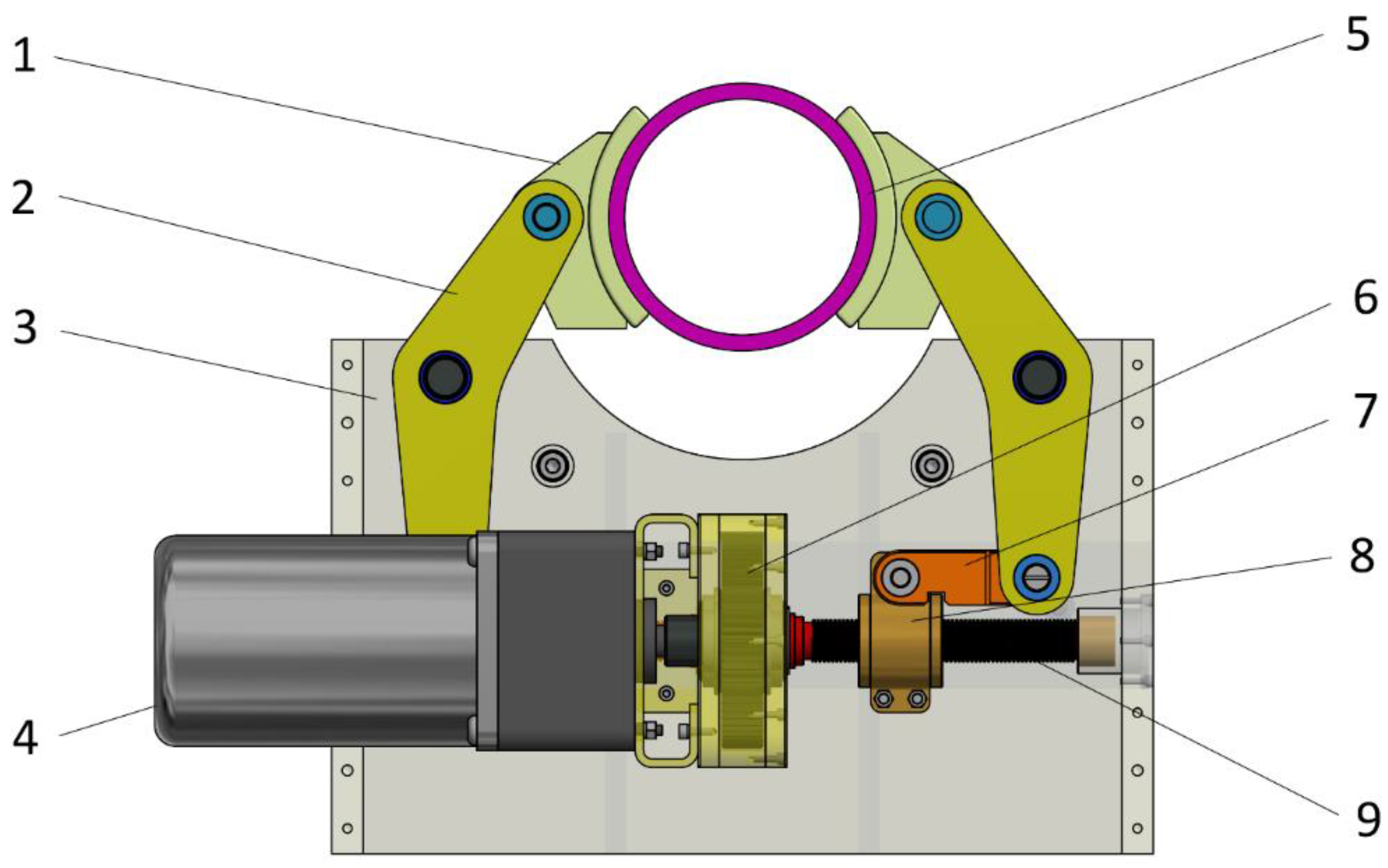
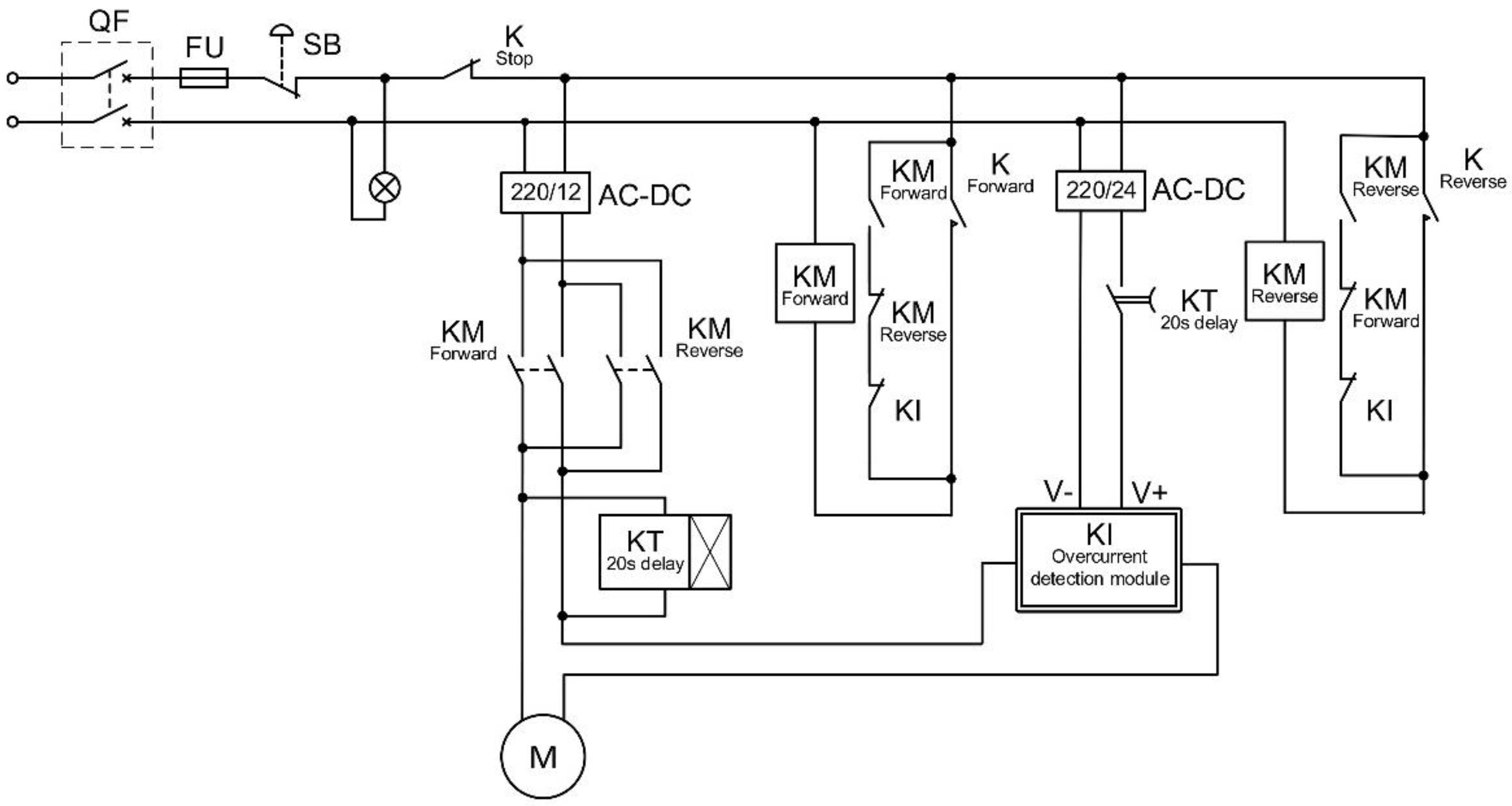
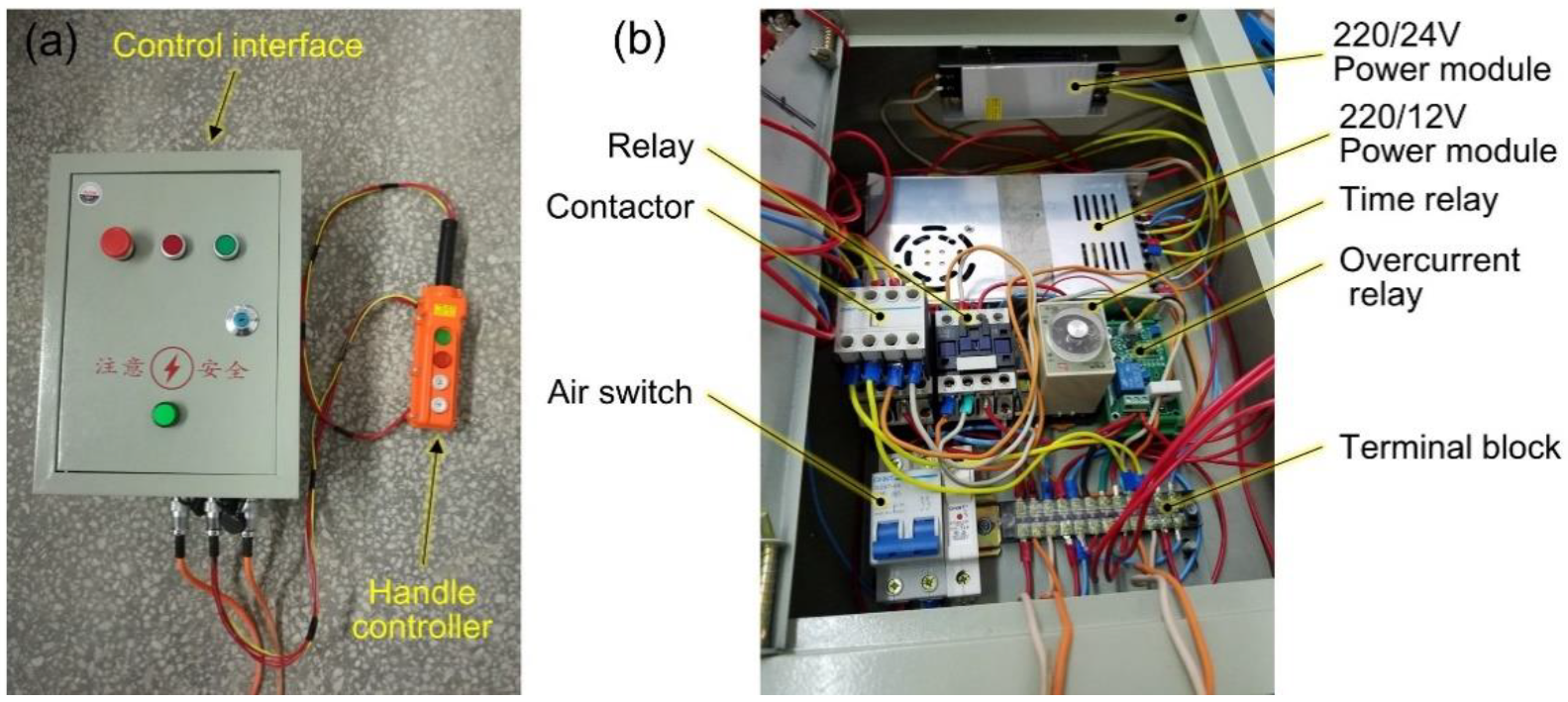
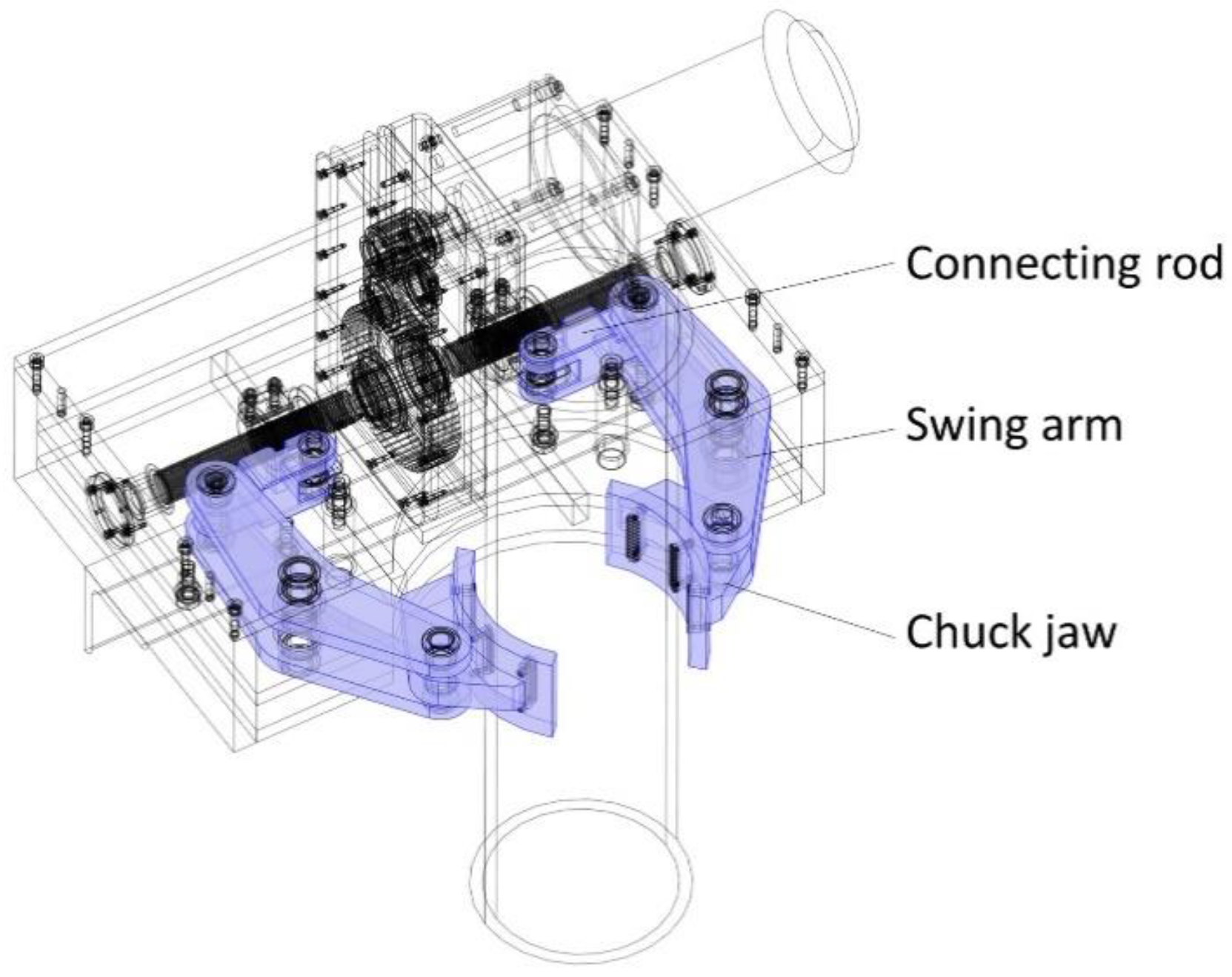
4. Mechanism Design of Clamper and Control System
5. Finite Element Simulation and Analysis
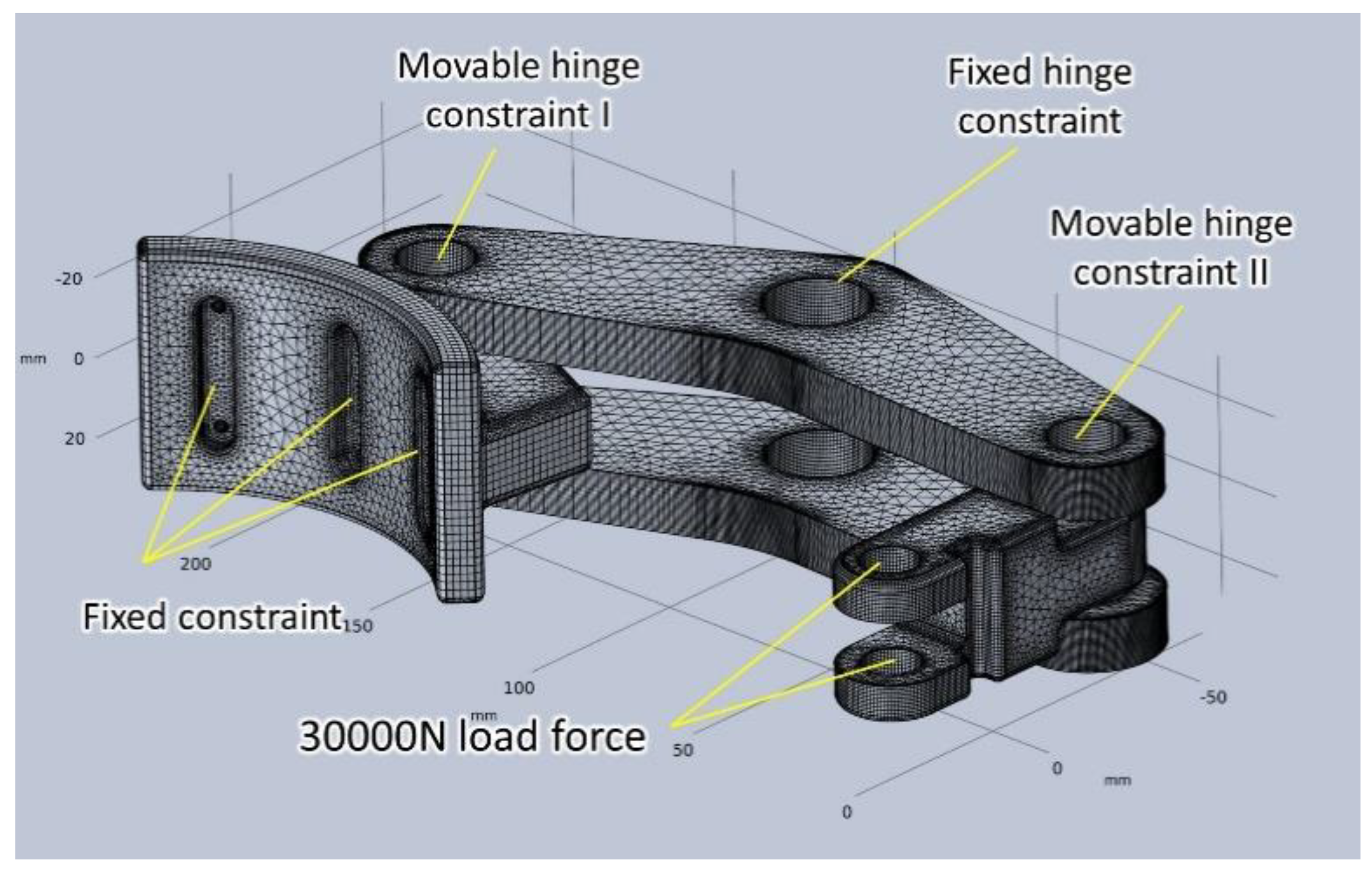
5.1. Boundary Condition
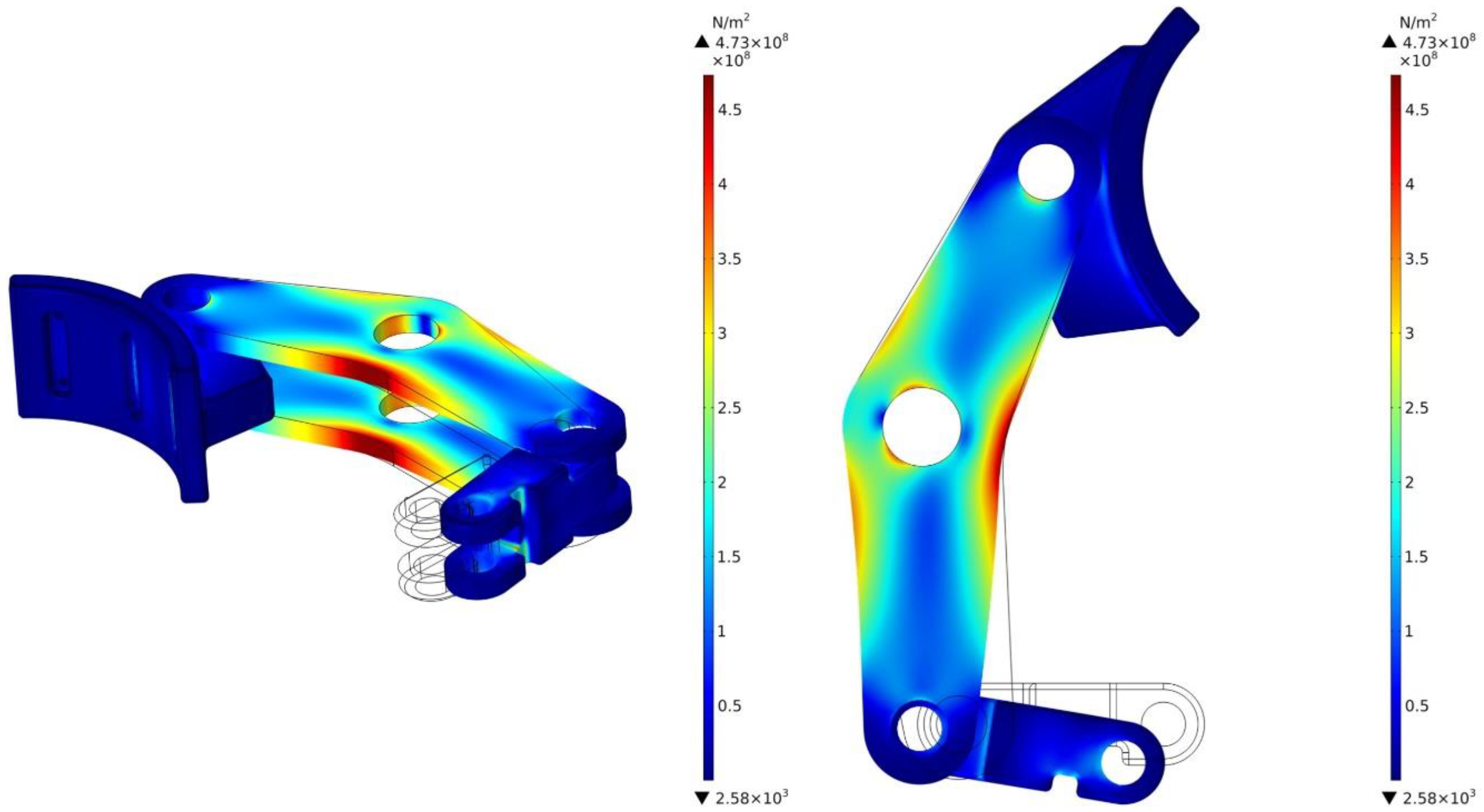
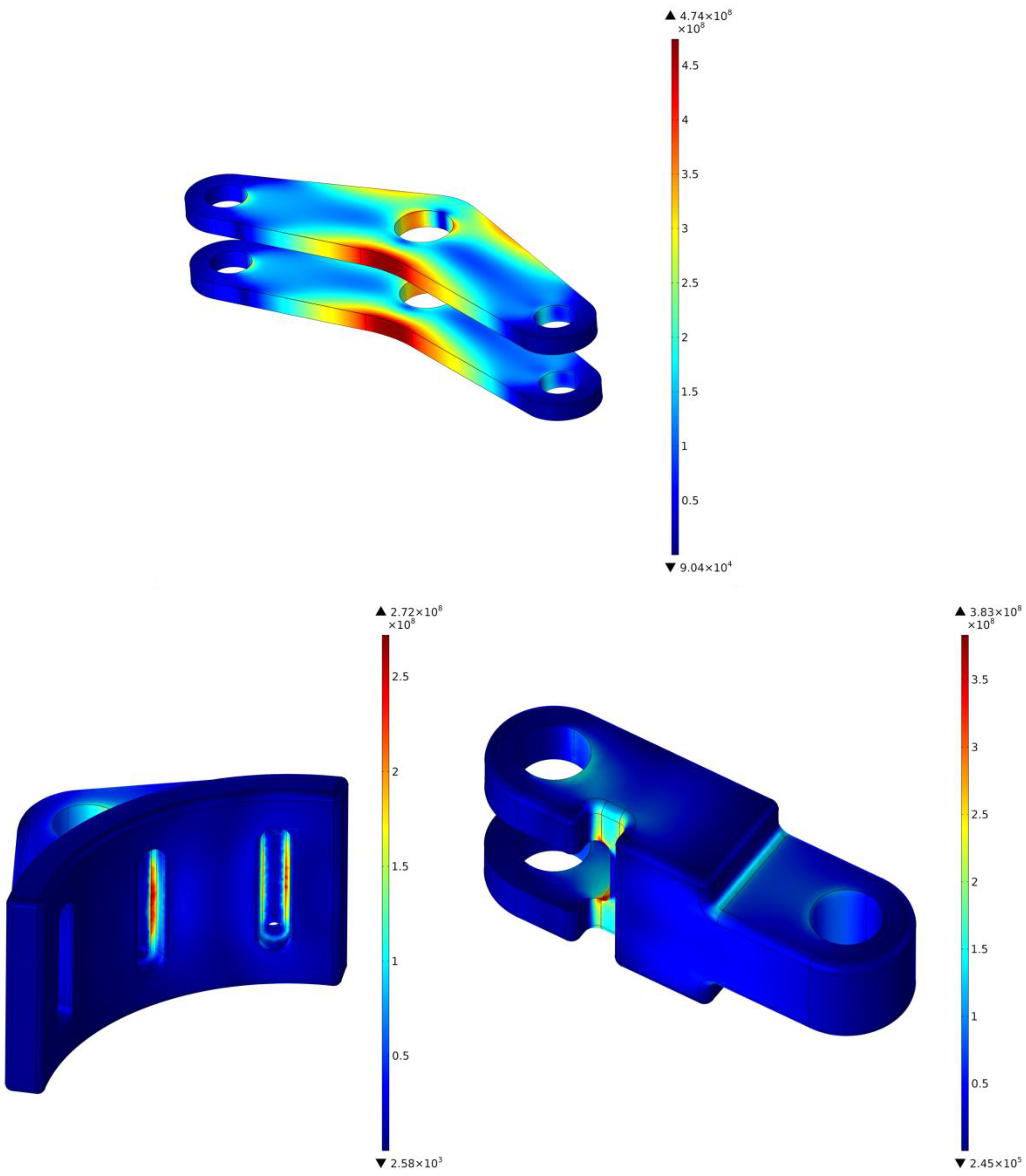
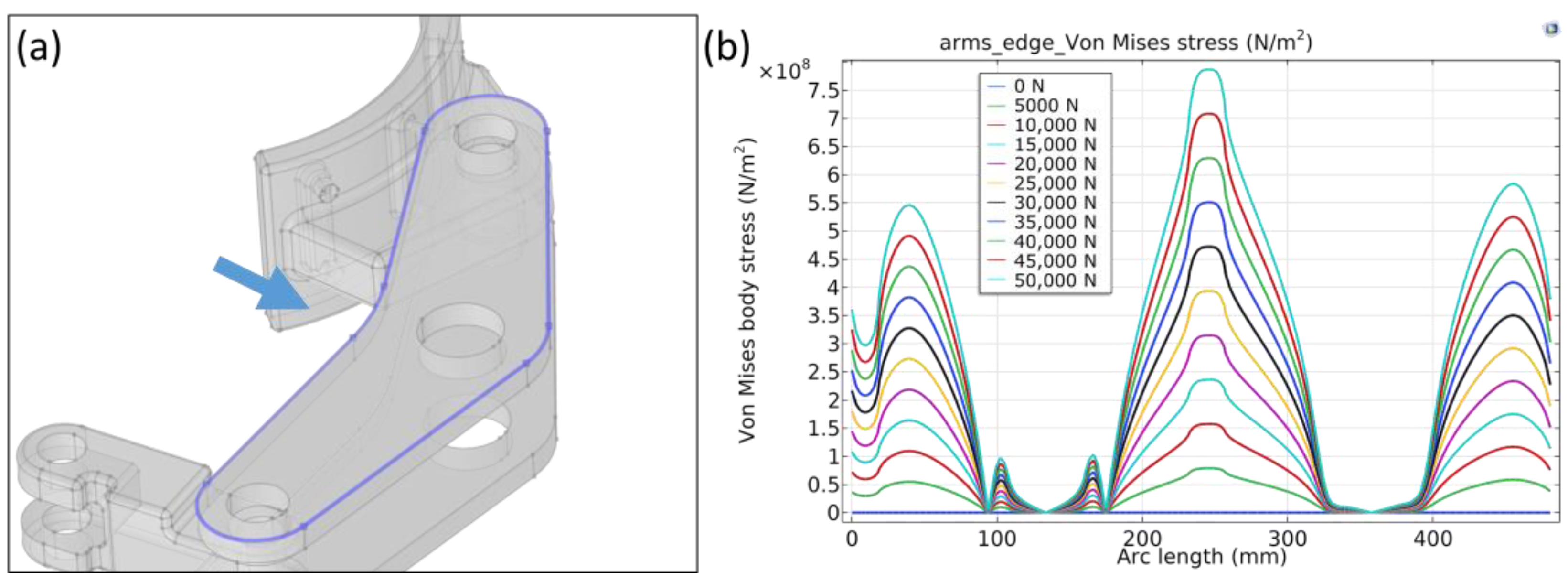
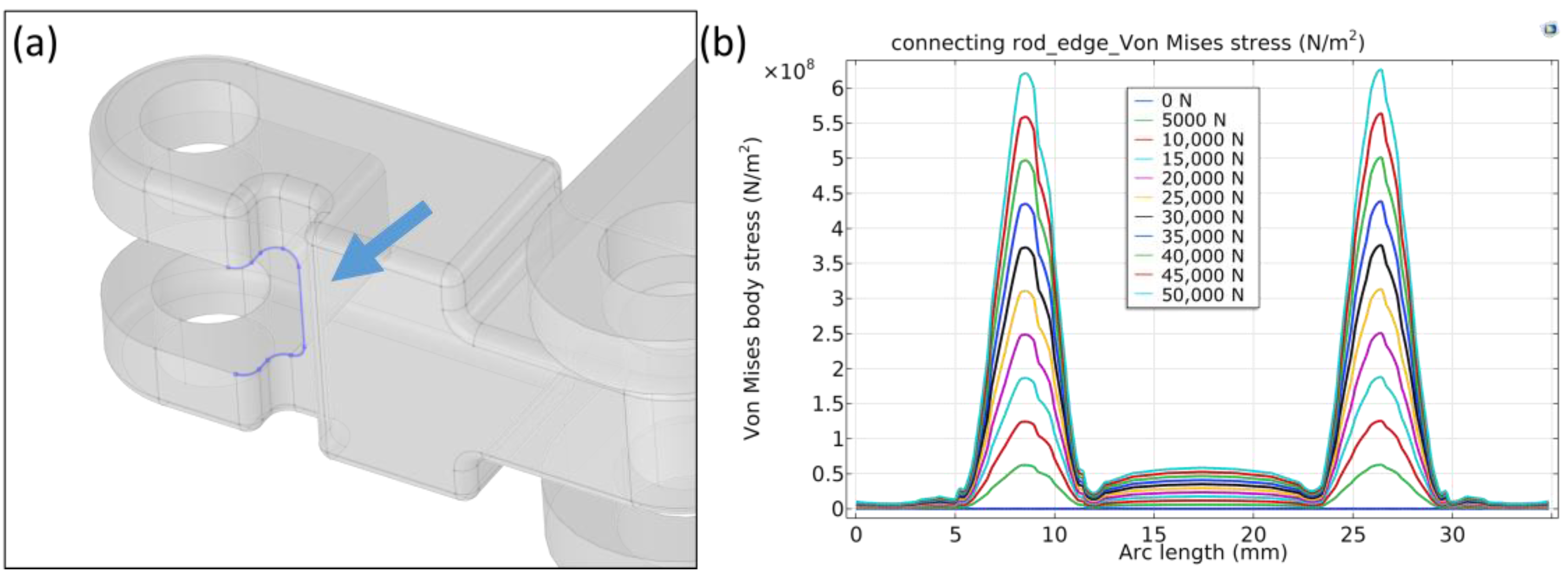
5.2. Deformation Trend and Stress Distribution
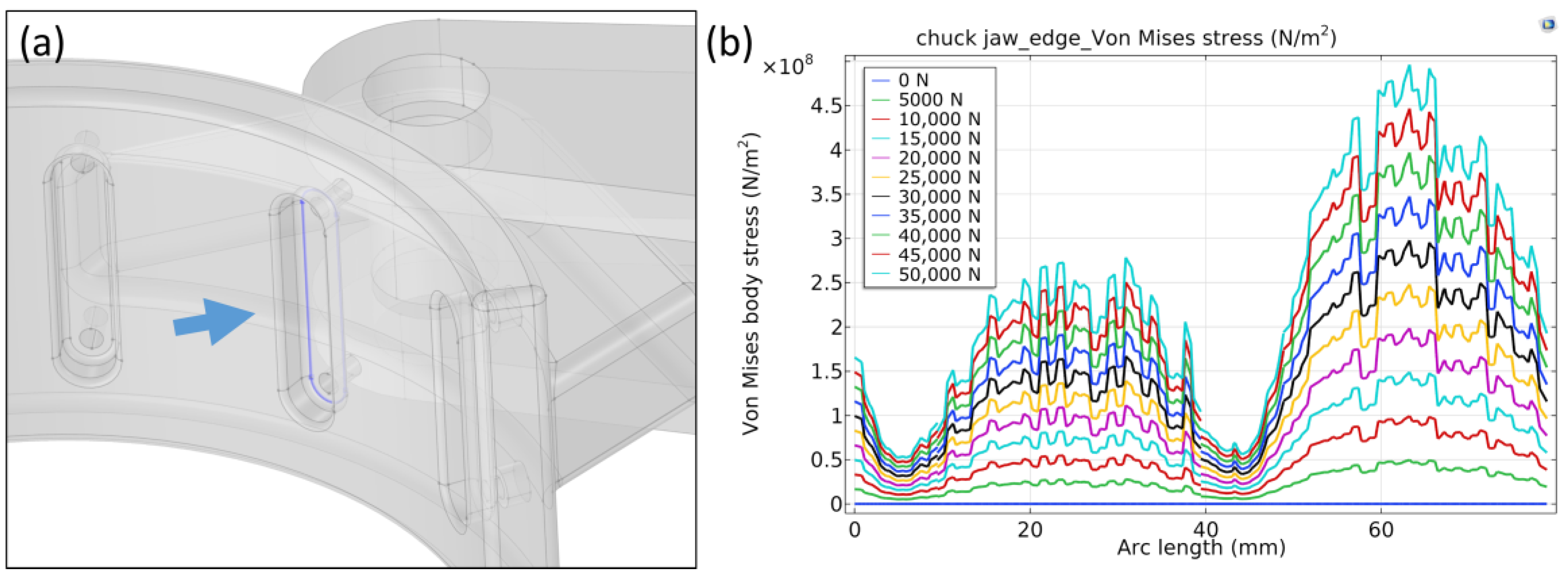
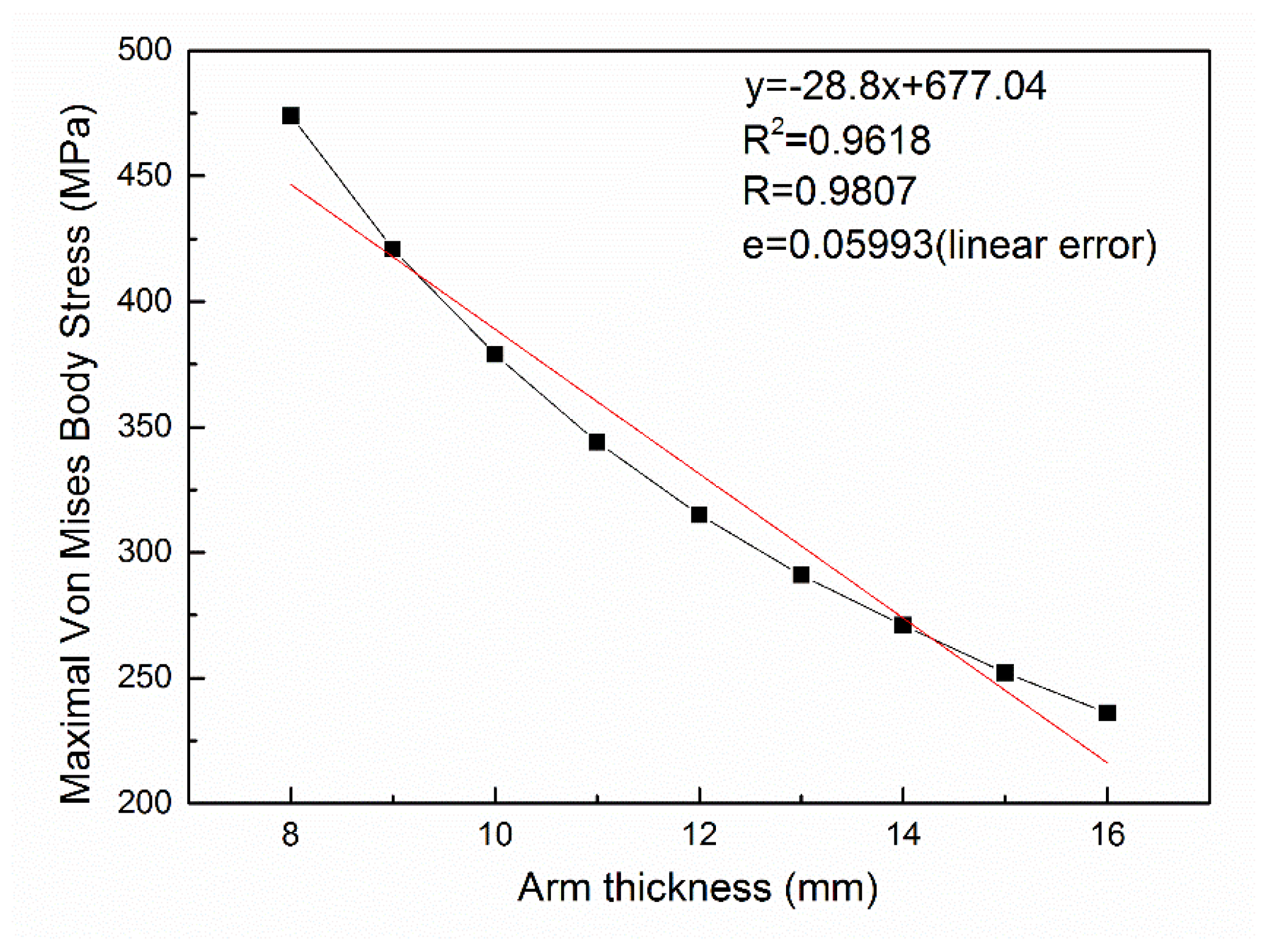
5.3. Structural Optimization of the Swing Arm
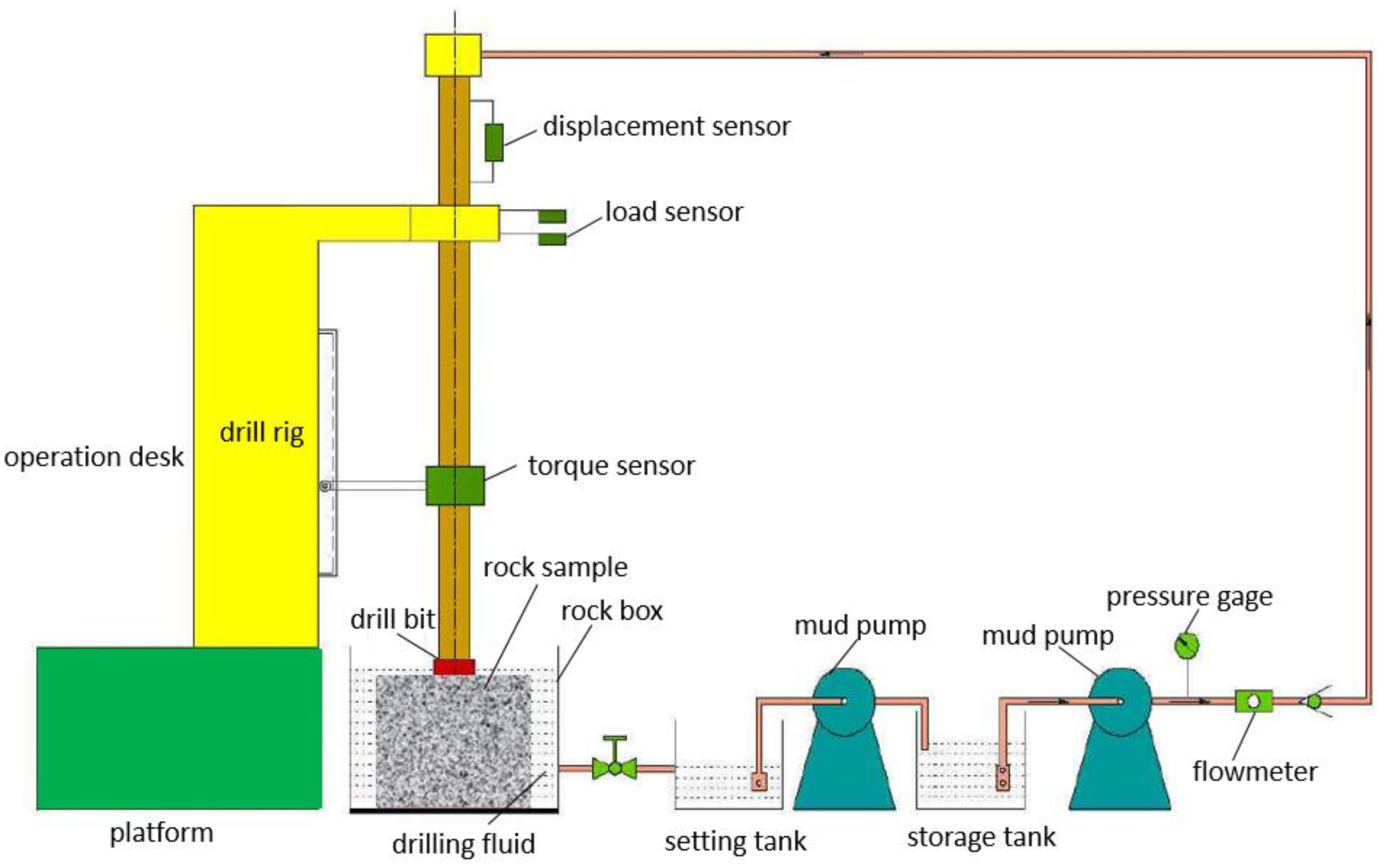
6. Clamping Force and Torque Test of Clamper
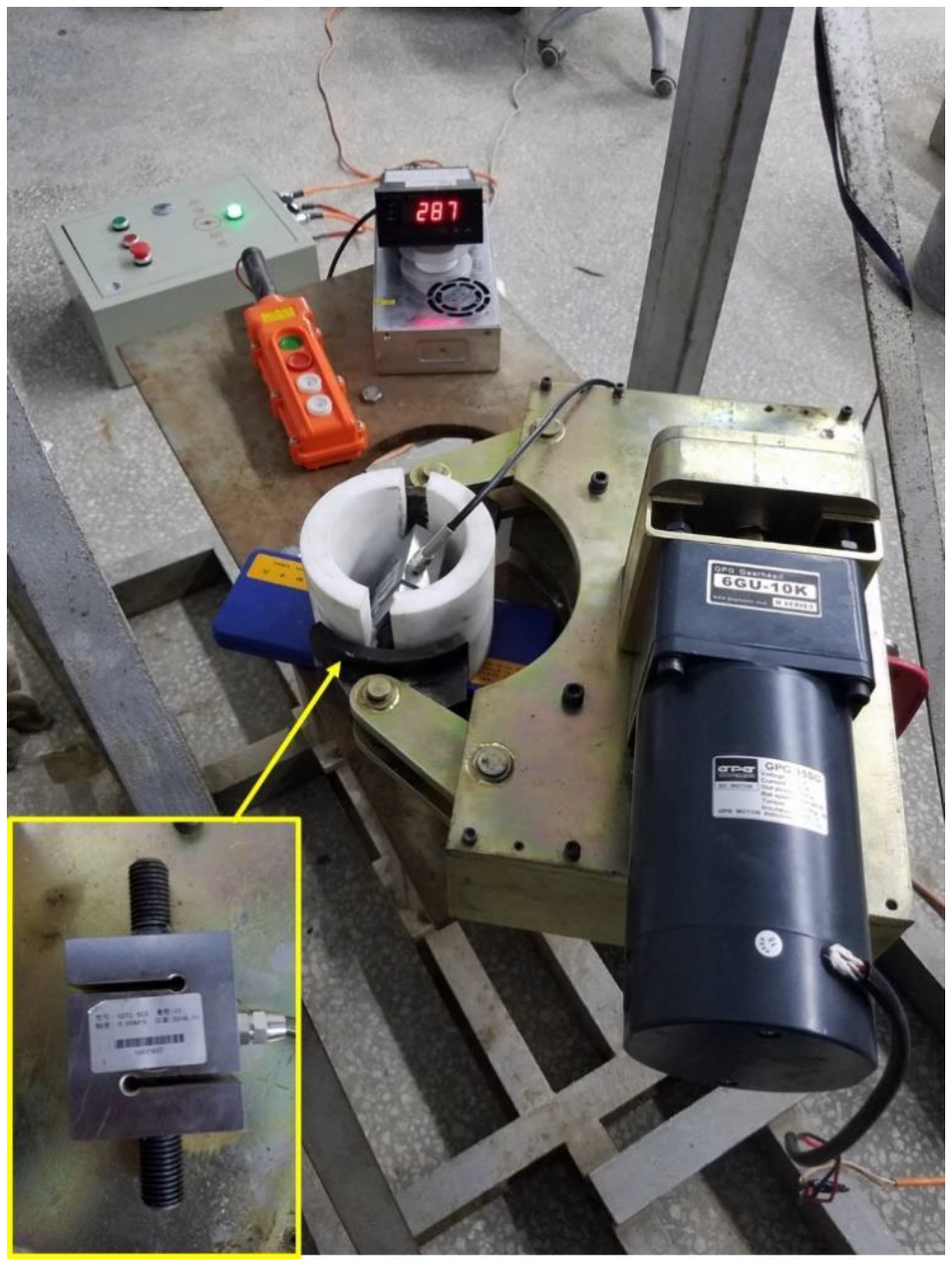
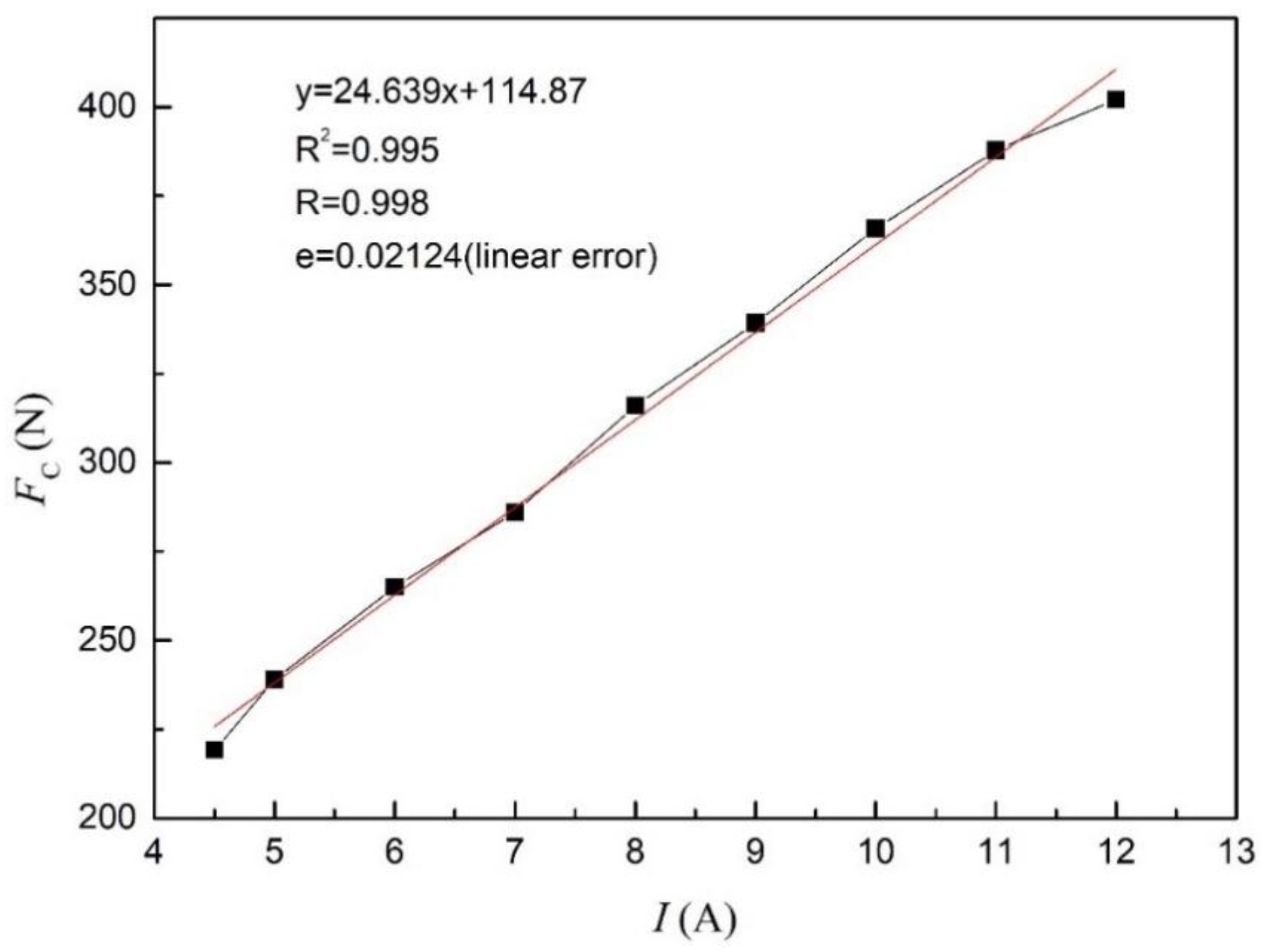
6.1. Clamping Force Test of Clamper
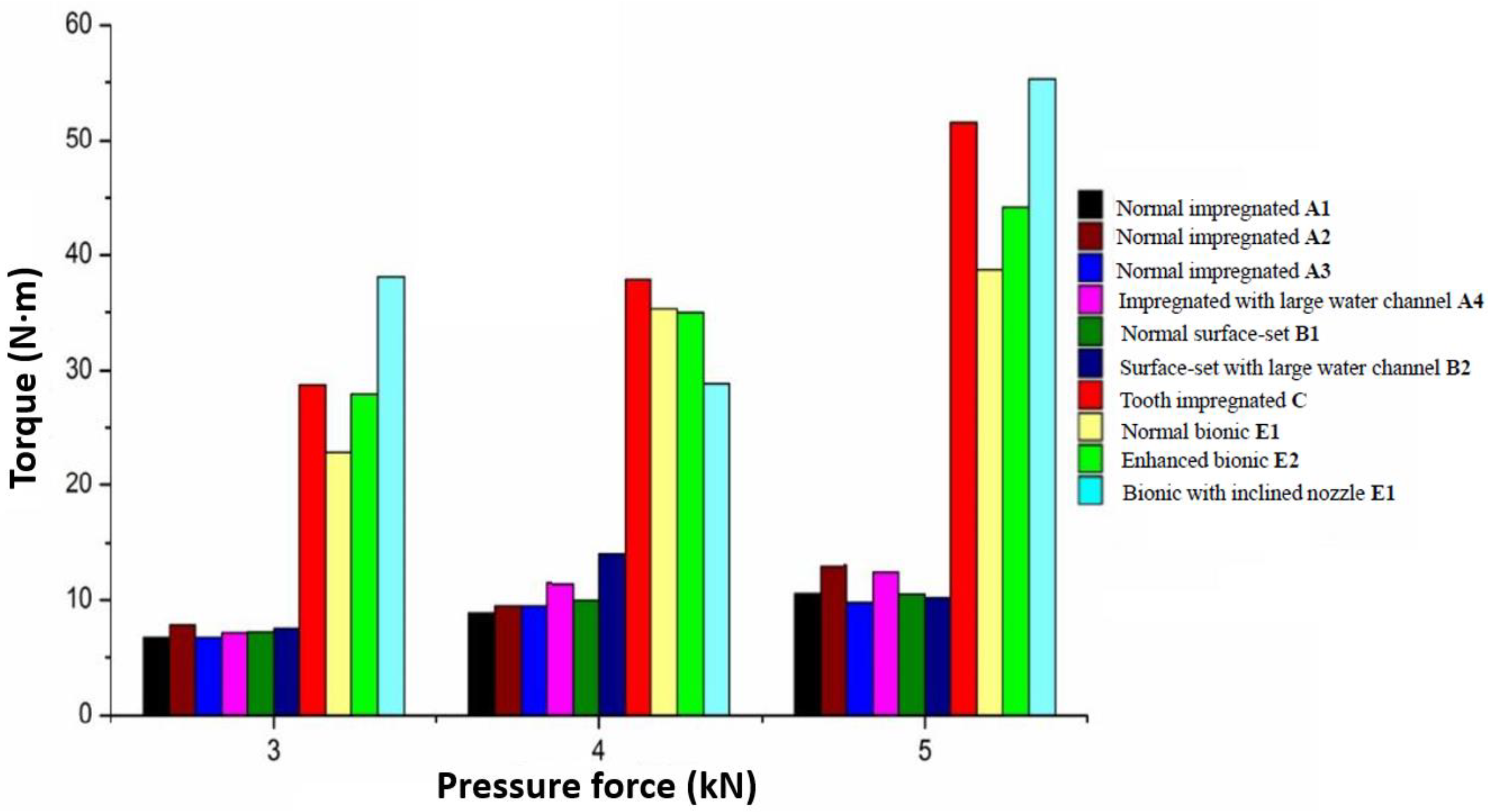
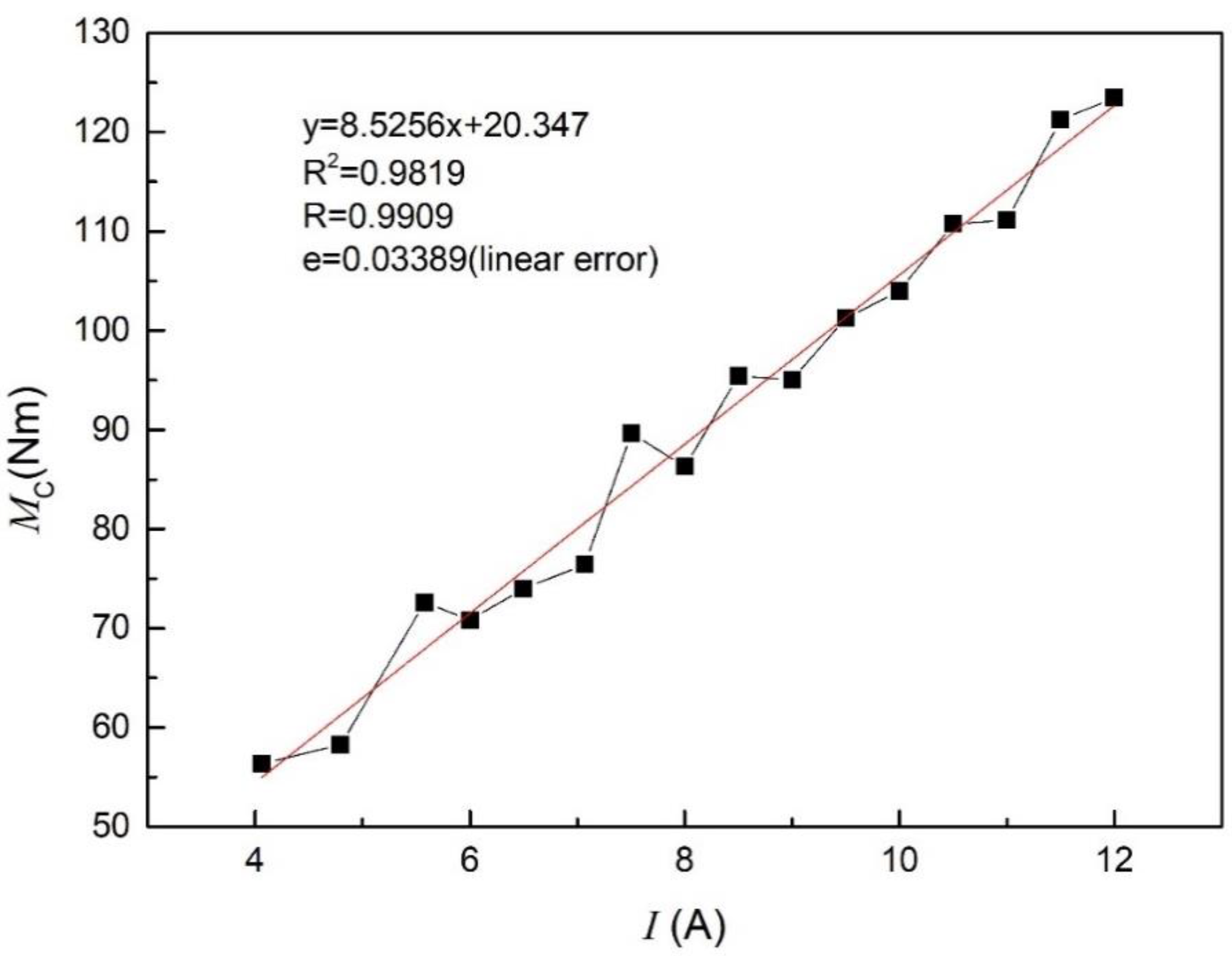
6.2. Clamping Torque Test of Clamper
7. Conclusions
- (1)
- The theoretical clamping torque was calculated and a value of 100 N·m was chosen, according to the technical parameters of IBED ice drill and bedrock drill, with safety factor values 2.0.
- (2)
- Finite element simulation and analysis of the non-standard transmission chain showed the mechanical reliability of the subparts, and the optimized structure of the swing arm.
- (3)
- Considering the special natural environment at the South Pole and the size requirements of the clamper installed inside the removable drilling shelter, the clamper was designed using a DC motor to drive the clamping and loosening action of the chuck jaws through the lead screw, and automatic control of the clamping force was realized using current control, which is simple in structure, with less vulnerable parts, and easy to operate.
- (4)
- The experimental results showed the range of clamping force and clamping torque of the clamper. In the meantime, the clamping force and clamping torque increase with the increase of the current and present a linear relationship. They can meet the clamping needs of the IBED for screwing, unscrewing and clamping, which would be greatly helpful when it is tested in field.
- (5)
- The chuck jaw designed in this paper was a groove staggered hard alloy chuck jaw. The equivalent friction coefficient between the chuck jaws and the stainless-steel pipe is 2.21, which can meet the practical application needs. However, during the clamping process, some damage would be caused to the drill pipe. Therefore, the next step should be to optimize the shape of the groove on the surface of the chuck jaw to find the most optimal type of chuck jaw which not only can meet the requirements but also protect the external pipe of the drill to the maximum extent.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Xiao, C.; Li, Y.; Hou, S.; Allison, I.; Bian, L.; Ren, J. Preliminary evidence indicating Dome A (Antarctica) satisfying preconditions for drilling the oldest ice core. Chin. Sci. Bull. 2008, 53, 102–106. [Google Scholar] [CrossRef]
- Bo, S.; Siegert, M.J.; Mudd, S.M.; Sugden, D.; Fujita, S.; Xiangbin, C.; Yunyun, J.; Xueyuan, T.; Yuansheng, L. The Gamburtsev mountains and the origin and early evolution of the Antarctic Ice Sheet. Nature 2009, 459, 690–693. [Google Scholar] [CrossRef]
- Talalay, P.G. Exploration of Gamburtsev Subglacial Mountains, East Antarctica: Background and plans for the near future. Geogr. Environ. Sustain. 2014, 7, 5–15. [Google Scholar] [CrossRef]
- Anderson, E.J.; Fujisaki-Manome, A.; Kessler, J.; Lang, G.; Chu, P.; Kelley, J.; Chen, Y.; Wang, J. Ice Forecasting in the Next-Generation Great Lakes Operational Forecast System (GLOFS). J. Mar. Sci. Eng. 2018, 6, 123. [Google Scholar] [CrossRef]
- Creyts, T.T.; Ferraccioli, F.; Bell, R.E.; Wolovick, M.; Corr, H.; Rose, K.C.; Frearson, N.; Damaske, D.; Jordan, T.; Braaten, D.; et al. Freezing of ridges and water networks preserves the Gamburtsev Subglacial Mountains for millions of years. Geophys. Res. Lett. 2014, 41, 8114–8122. [Google Scholar] [CrossRef]
- Steig, E.J.; Morse, D.L.; Waddington, E.D.; Stuiver, M.; Grootes, P.M.; Mayewski, P.A.; Twickler, M.S.; Whitlow, S.I. Wisconsinan and Holocene climate history from an ice core at Taylor Dome, western Ross Embayment, Antarctica. Geogr. Ann. 2000, 82, 213–235. [Google Scholar] [CrossRef]
- Slangen, A.; van de Wal, R.; Reerink, T.; de Winter, R.; Hunter, J.; Woodworth, P.; Edwards, T. The Impact of Uncertainties in Ice Sheet Dynamics on Sea-Level Allowances at Tide Gauge Locations. J. Mar. Sci. Eng. 2017, 5, 21. [Google Scholar] [CrossRef]
- Saliba, F.M.; Cardoso, M.; Torres, M.F.; Teixeira, A.C.; Lourenço, E.J.V.; Telles, D.D.M. A rationale method for evaluating unscrewing torque values of prosthetic screws in dental implants. J. Appl. Oral Sci. Rev. Fob 2011, 19, 63. [Google Scholar] [CrossRef]
- Talalay, P.G. Subglacial till and bedrock drilling. Cold Reg. Sci. Technol. 2013, 86, 142–166. [Google Scholar] [CrossRef]
- Zapol, W.M. Future Science Opportunities in Antarctica and the Southern Ocean; The National Academies Press: Washington, DC, USA, 2011. [Google Scholar]
- Zhou, X.; Walker, P.; Zhang, N.; Zhu, B.; Ruan, J. Numerical and experimental investigation of drag torque in a two-speed dual clutch transmission. Mech. Mach. Theory 2014, 79, 46–63. [Google Scholar] [CrossRef]
- Triest, J.; Mulvaney, R.; Alemany, O. Technical innovation sand optimizations for intermediate ice-core drilling operations. Ann. Glaciol. 2014, 55, 243–252. [Google Scholar] [CrossRef]
- Gao, J.; Yan, G.; He, S.; Xu, F.; Wang, Z. Design, analysis, and testing of a motor-driven capsule robot based on a sliding clamper. Robotica 2017, 35, 521–536. [Google Scholar] [CrossRef]
- Azuma, N.; Tanabe, I.; Motoyama, H. Heat generated by cutting ice in deep ice-core drilling. Ann. Glaciol. 2007, 47, 61–67. [Google Scholar] [CrossRef]
- Zhang, N.; An, C.; Fan, X.; Shi, G.; Li, C.; Liu, J.; Hu, Z.; Talalay, P.; Sun, Y.; Li, Y. Chinese first deep ice-core drilling project DK-1 at Dome A, Antarctica (2011–2013): Progress and performance. Ann. Glaciol. 2014, 55, 65–71. [Google Scholar] [CrossRef]
- Cao, P.; Yang, C.; Chen, Y.; Chen, B.; Talalay, P. Experimental study of the drilling process in debris-rich ice. Cold Reg. Sci. Technol. 2015, 120, 138–144. [Google Scholar] [CrossRef]
- Fan, X. Research on the Balance between Subglacial Bedrock Drilling Parameters and Capabilities of Antitorque System of Cable-Suspended Electromechanical Drill; Jilin University: Changchun, China, 2014. [Google Scholar]
- Cao, P.; Chen, B.; Liu, C.; Yang, C.; Talalay, P. Experimental investigation of cutting temperature in ice drilling. Cold Reg. Sci. Technol. 2015, 116, 78–85. [Google Scholar] [CrossRef]
- Augustin, L.; Panichi, S.; Frascati, F. EPICA Dome C 2 drilling operation: Performances, difficulties, results. Ann. Glaciol. 2007, 47, 68–72. [Google Scholar] [CrossRef]
- Talalay, P.; Fan, X.; Zheng, Z.; Xue, J.; Cao, P.; Zhang, N.; Wang, R.; Yu, D.; Yu, C.; Zhang, Y.; et al. Anti-torque systems of electromechanical cable-suspended drills and test results. Ann. Glaciol. 2014, 55, 207–218. [Google Scholar] [CrossRef]
- Ueda, H.T.; Garfield, D.E. Core Drilling through the Antarctic Ice Sheet; Technical Report 231; CRREL: Hanover, NH, USA, 1969; pp. 1–17. [Google Scholar]
- Tian, H.; Hu, S. Experimental study on frictional factor between chuck jaw and drilling rod. Coal Geol. Explor. 2003, 31. [Google Scholar]
- Zhang, Y.; Wang, Y.; Wang, D. Experimental study on tooth shape design of drill pipe chuck jaws. Pet. Mach. 1981, 9, 1–17. (In Chinese) [Google Scholar]
- Heya, A.; Nakata, Y.; Sakai, M.; Ishiguro, H.; Hirata, K. Force Estimation Method for a Magnetic Lead-Screw-Driven Linear Actuator. IEEE Trans. Magn. 2018, 54, 8207805. [Google Scholar] [CrossRef]
- Gonçalves, D.E.; Fernandes, C.M.; Martins, R.C.; Seabra, J.H. Torque loss in a gearbox lubricated with wind turbine gear oils. Lubr. Sci. 2013, 25, 297–311. [Google Scholar] [CrossRef]
- Cao, P.; Yang, C.; Zheng, Z.; Wang, R.; Zhang, N.; Liu, C.; Hu, Z.; Talalay, P. Low-load diamond drill bits for subglacial bedrock sampling. Ann. Glaciol. 2014, 55, 124–130. [Google Scholar] [CrossRef]
- Talalay, P.G. Power consumption of deep ice electromechanical drills. Cold Reg. Sci. Technol. 2003, 37, 69–79. [Google Scholar] [CrossRef]
- Herber, T.U.; John, K. Experiments on the Cutting Process in Ice; Report 89-5; CRREL: Hanover, NH, USA, 1989. [Google Scholar]
- Shamshev, F.A.; Tarakanov, S.N.; Kudryashov, B.B.; Pariiskii, Y.N.; Yakovlev, A.M.; Sal’e, E.A. Technology and Technique of prospecting drilling. Mosc. Nedra 1985, 565. (In Russian) [Google Scholar]
- Wumkes, M.A. Development of the U.S. deep coring ice drill. Mem. Natl. Inst. Polar Res. 1994, 49, 41–51. [Google Scholar]
- Wehrle, E. A shallow core-collecting mechanical ice drill. Anare Res. Notes 1985, 28, 196–201. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Power (W) | Rotation Speed of Motor (rpm) | Voltage (V) | Current (A) | Reduction Ratio | Maximum Torque (N·m) |
|---|---|---|---|---|---|---|
| GDM-15SC-10K | 200 | 1800 | 24 | 13.9 | 10 | 8.572 |
| Density (kg/m3) | Young Modulus (GPa) | Poisson Ratio | Yield Strength (MPa) | Tensile Strength (MPa) |
|---|---|---|---|---|
| 7850 | 209 | 0.3 | 785 | 810 |
| I (A) | F (N) | M (N·m) | ||
|---|---|---|---|---|
| 4–4.5 | 219 | 56 | 2.08 | 2.21 |
| 5 | 239 | 73 | 2.40 | |
| 6 | 265 | 71 | 2.11 | |
| 7 | 286 | 76 | 2.09 | |
| 8 | 316 | 86 | 2.14 | |
| 9 | 339 | 95 | 2.21 | |
| 10 | 366 | 104 | 2.24 | |
| 11 | 388 | 111 | 2.25 | |
| 12 | 402 | 123 | 2.41 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Talalay, P.; Li, X.; Gong, D.; Fan, X.; Zhang, N.; Yang, Y.; Liu, Y.; Liu, Y.; Wang, T.; Li, X. Design and Experiment of Clamper Used in Antarctic Subglacial Bedrock Drilling. J. Mar. Sci. Eng. 2019, 7, 153. https://doi.org/10.3390/jmse7050153
Talalay P, Li X, Gong D, Fan X, Zhang N, Yang Y, Liu Y, Liu Y, Wang T, Li X. Design and Experiment of Clamper Used in Antarctic Subglacial Bedrock Drilling. Journal of Marine Science and Engineering. 2019; 7(5):153. https://doi.org/10.3390/jmse7050153
Chicago/Turabian StyleTalalay, Pavel, Xingchen Li, Da Gong, Xiaopeng Fan, Nan Zhang, Yang Yang, Yongwen Liu, Yunchen Liu, Ting Wang, and Xiao Li. 2019. "Design and Experiment of Clamper Used in Antarctic Subglacial Bedrock Drilling" Journal of Marine Science and Engineering 7, no. 5: 153. https://doi.org/10.3390/jmse7050153
APA StyleTalalay, P., Li, X., Gong, D., Fan, X., Zhang, N., Yang, Y., Liu, Y., Liu, Y., Wang, T., & Li, X. (2019). Design and Experiment of Clamper Used in Antarctic Subglacial Bedrock Drilling. Journal of Marine Science and Engineering, 7(5), 153. https://doi.org/10.3390/jmse7050153