Bridge Scour Identification and Field Application Based on Ambient Vibration Measurements of Superstructures



Abstract
1. Introduction
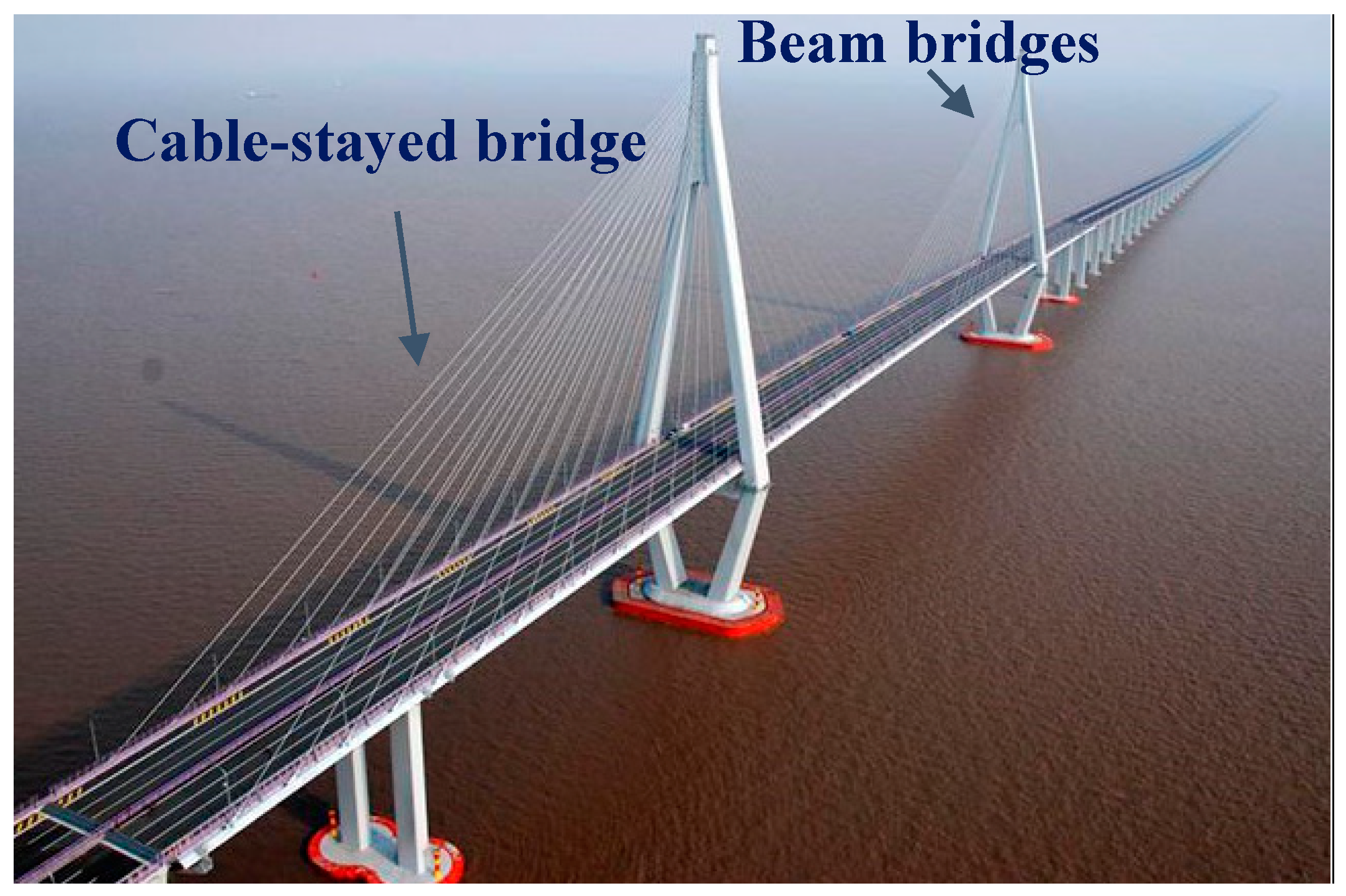
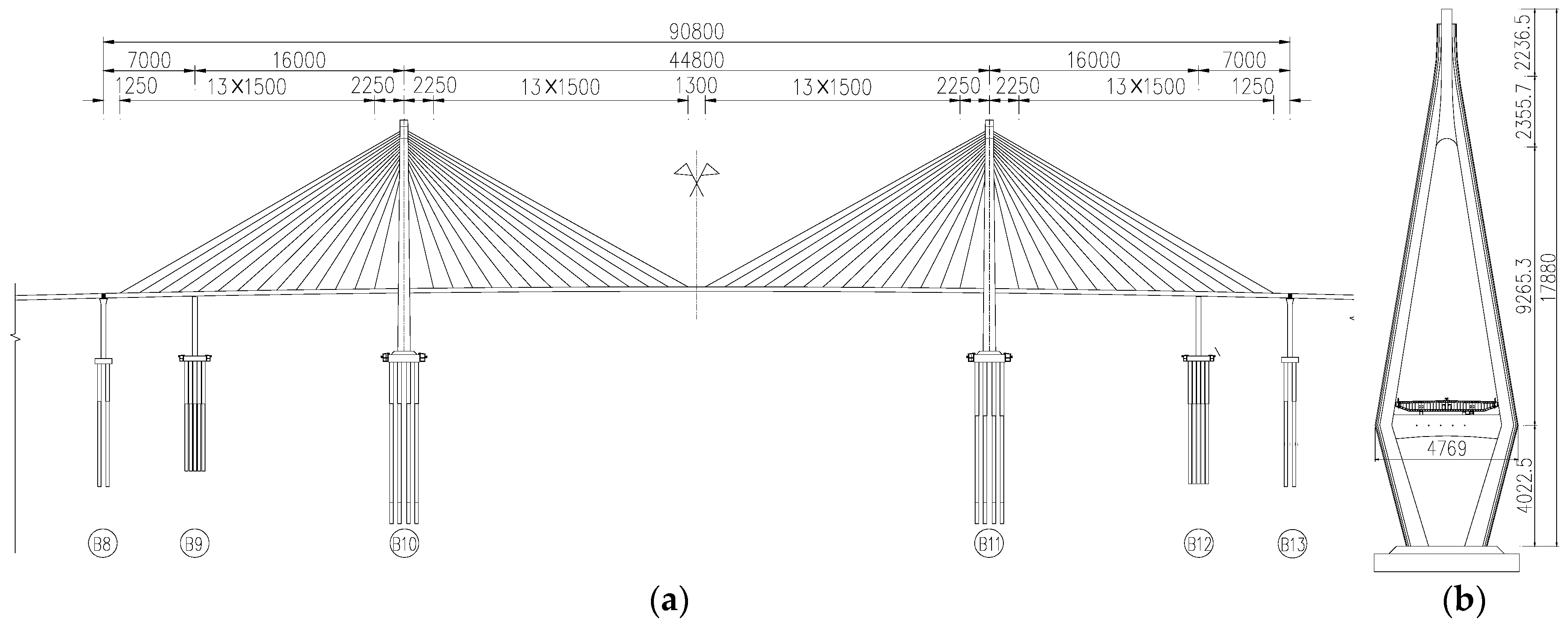
2. The Hangzhou Bay Cable-Stayed Bridge
2.1. Bridge Information
2.2. Soil Properties
2.3. Potential Scour Development
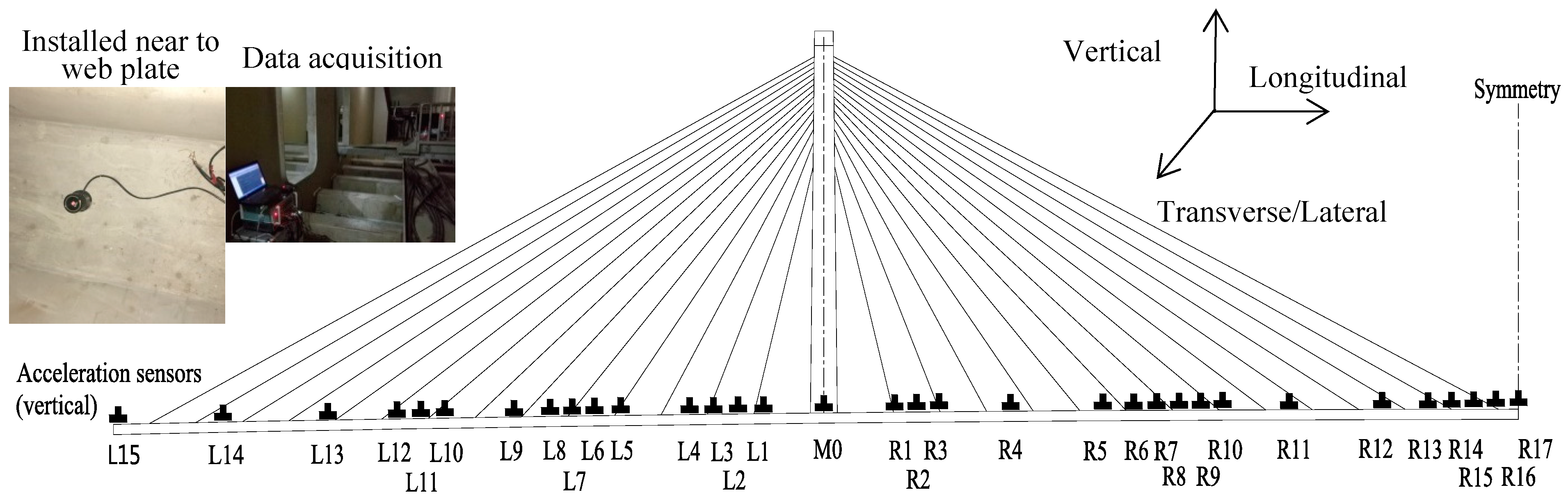
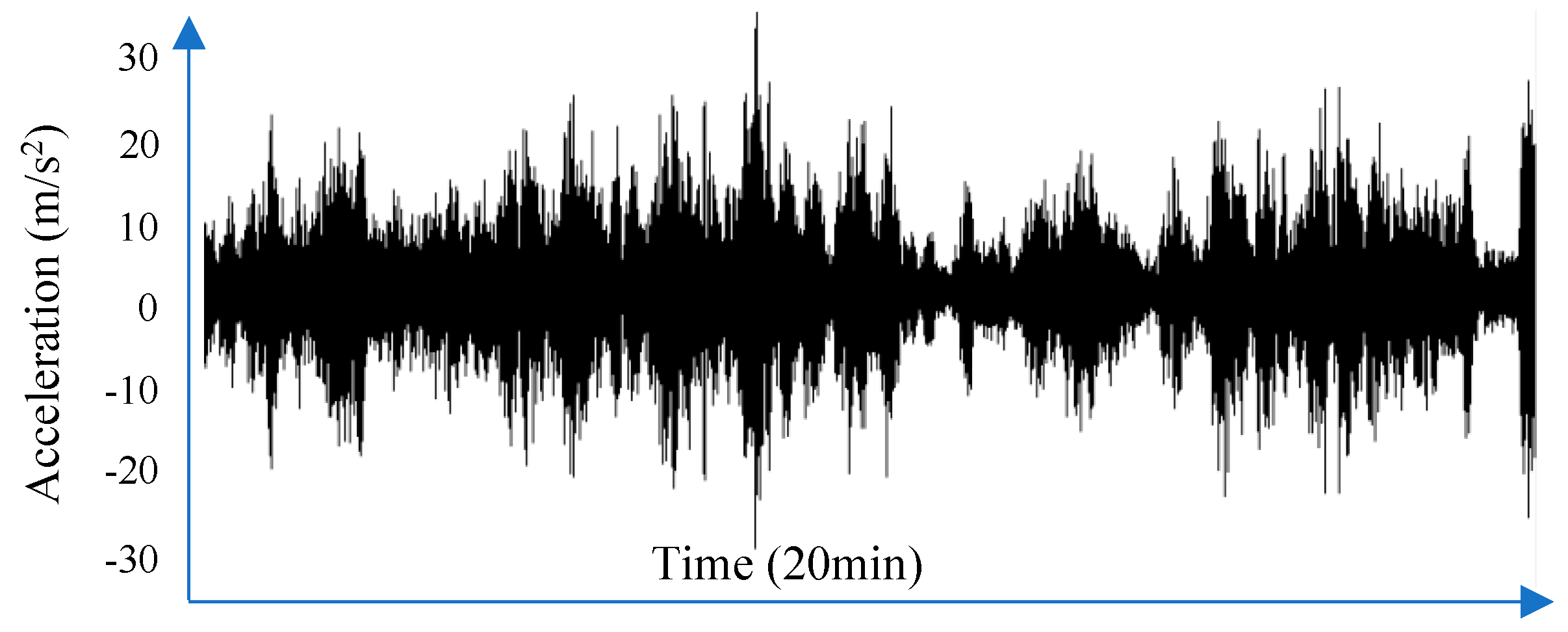
3. Ambient Vibration Measurements
- (1)
- Locations at each wave crest and trough of the mode shapes. These mode shapes are the ones of low order and sensitive to the scour.
- (2)
- Locations at quartile division points between the adjacent crest and trough of the selected mode shape wave. The wave profile can be predicted by the FE method before the measurement.
- (3)
- Locations at the points with a significant change of mode shapes. More than four sensors are suggested to be sequentially installed to determine the curvature of the shape change.
- (4)
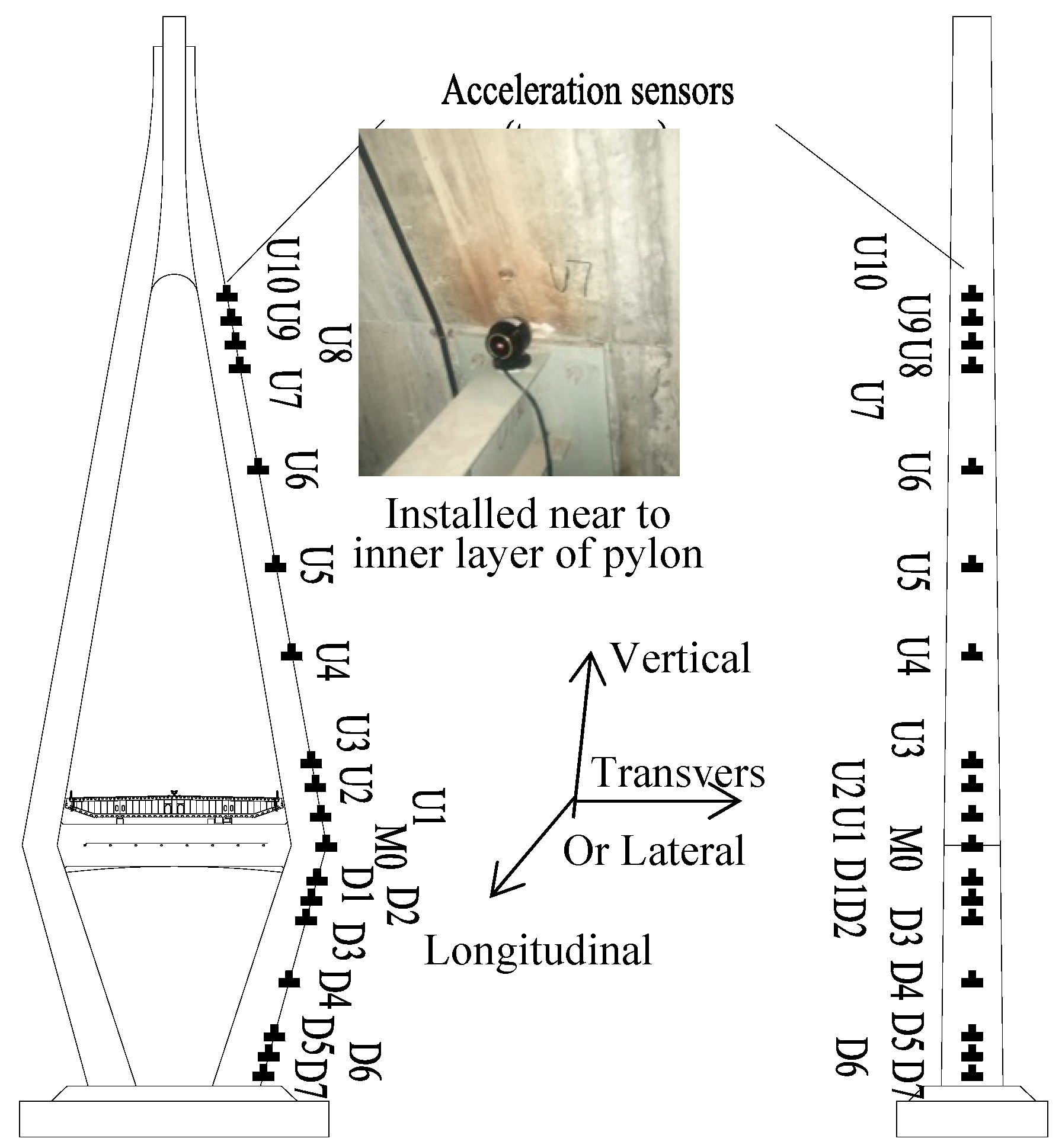
- Locations at the scour-sensitive components, such as the pylon and girder near piers.
- (5)
- (6)
- Locations at the components with few local vibrations, such as the web plate or crossbeams of the steel box girder, as shown in Figure 4.
- (7)
- Sensor installation needs to follow the direction of the vibration for each scour-sensitive mode shape. For example, the sensors for measuring the pylon needs to be installed horizontally since the scour-sensitive mode shapes of the pylon mainly vibrate transversely.
4. Qualitative Scour Identification by Tracing Dynamic Features
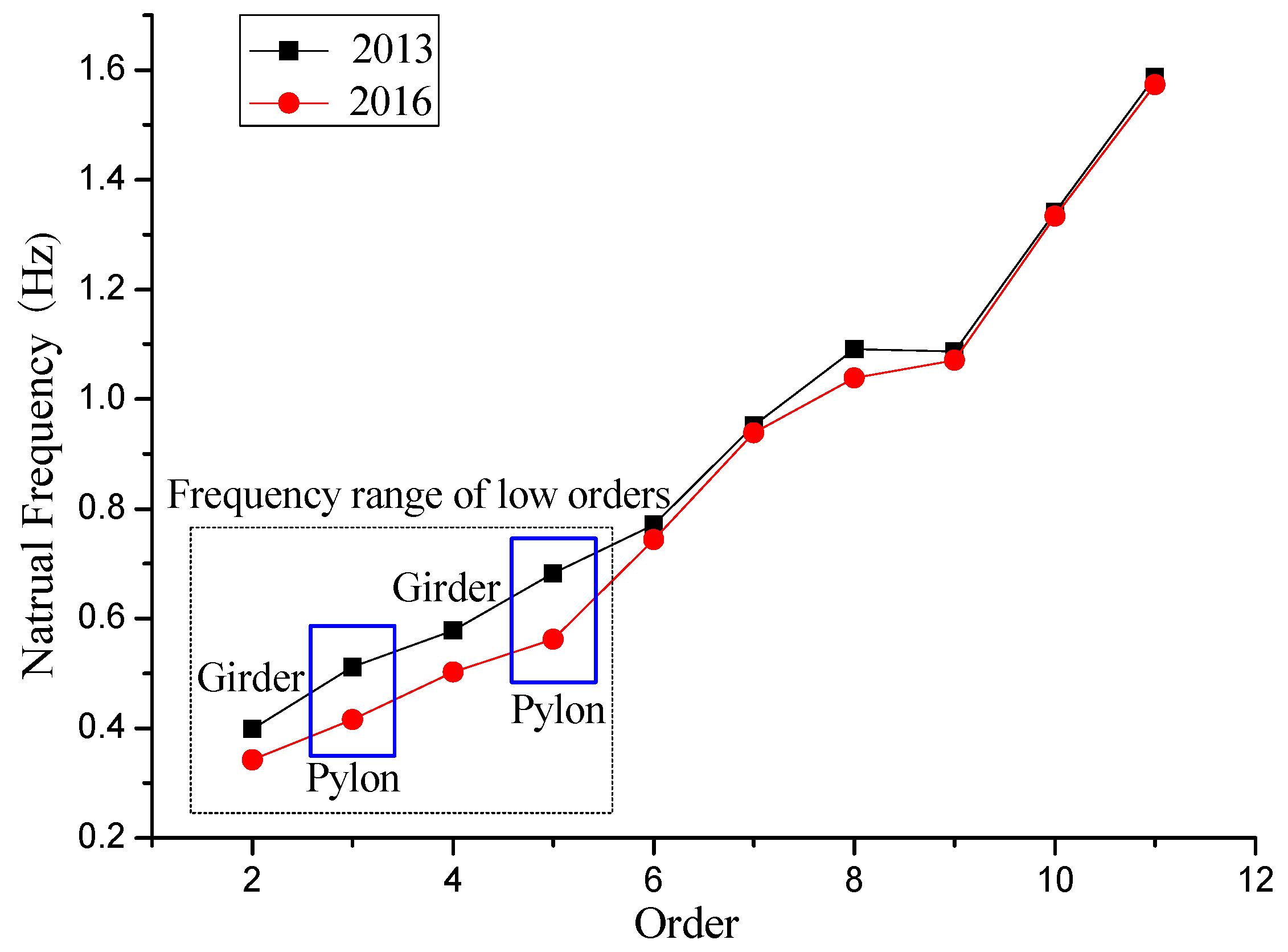
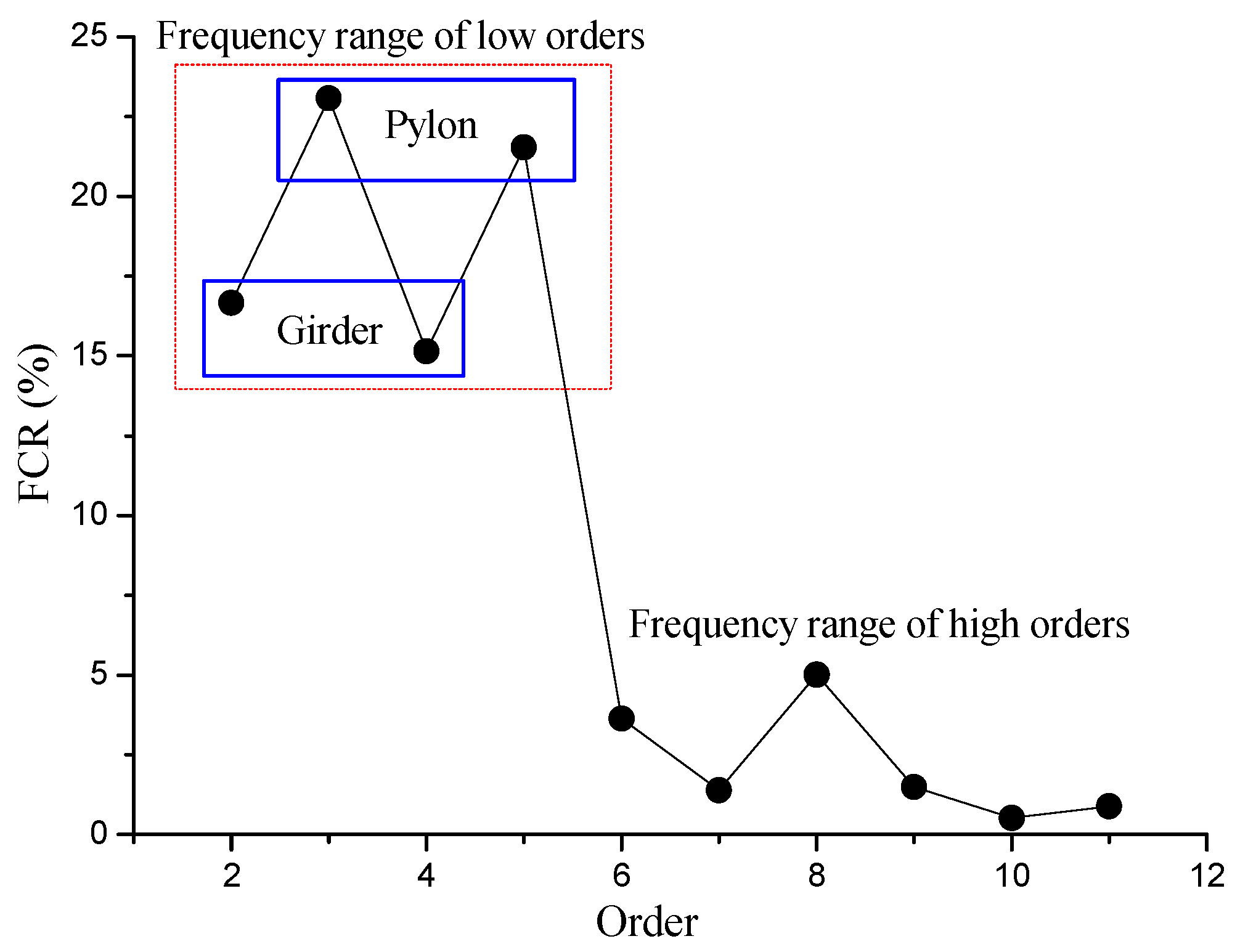
4.1. Identification by the Change of Natural Frequencies
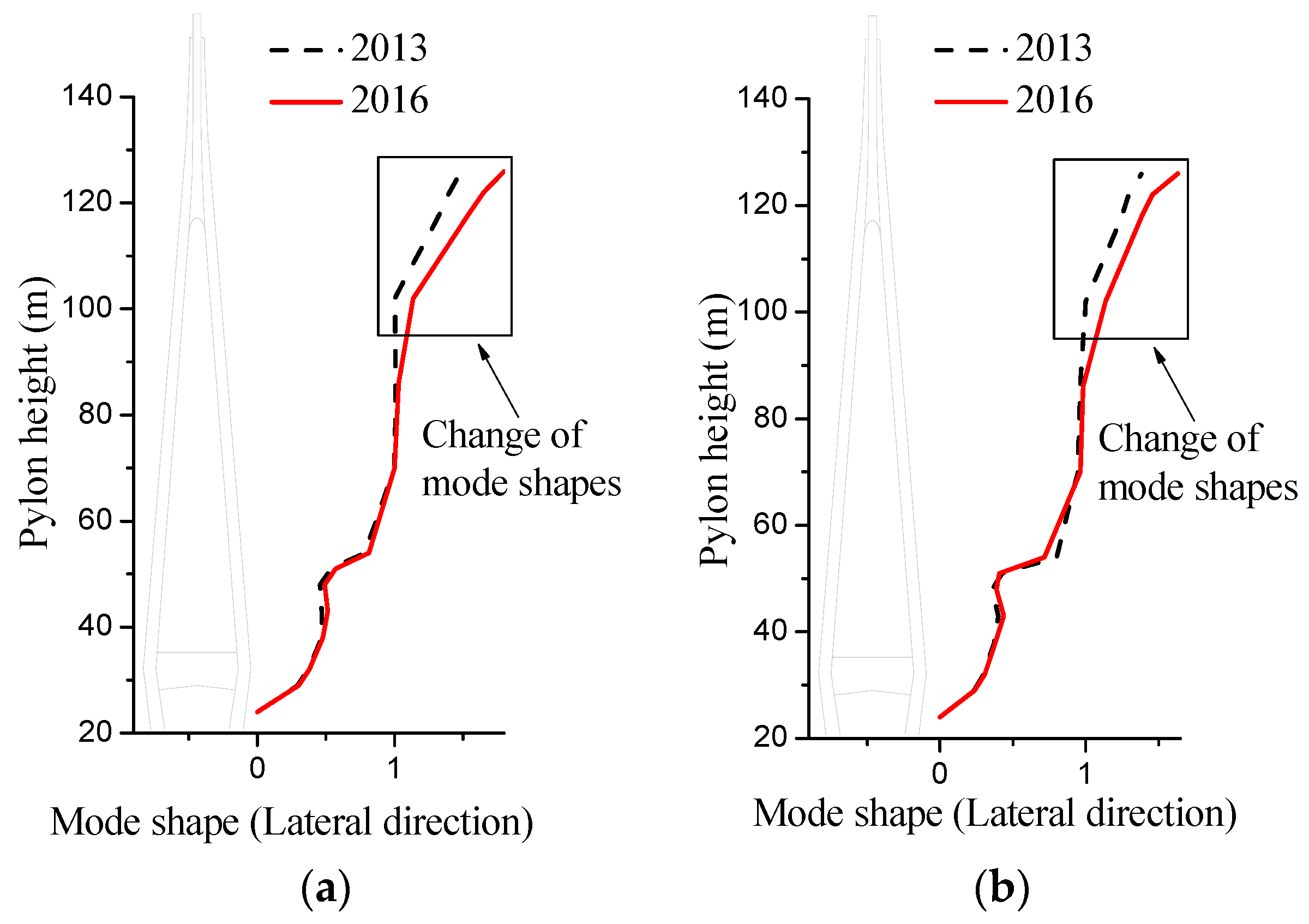
4.2. Identification by the Change of Mode Shapes
5. Quantitative Scour Identification by FE Model Updating
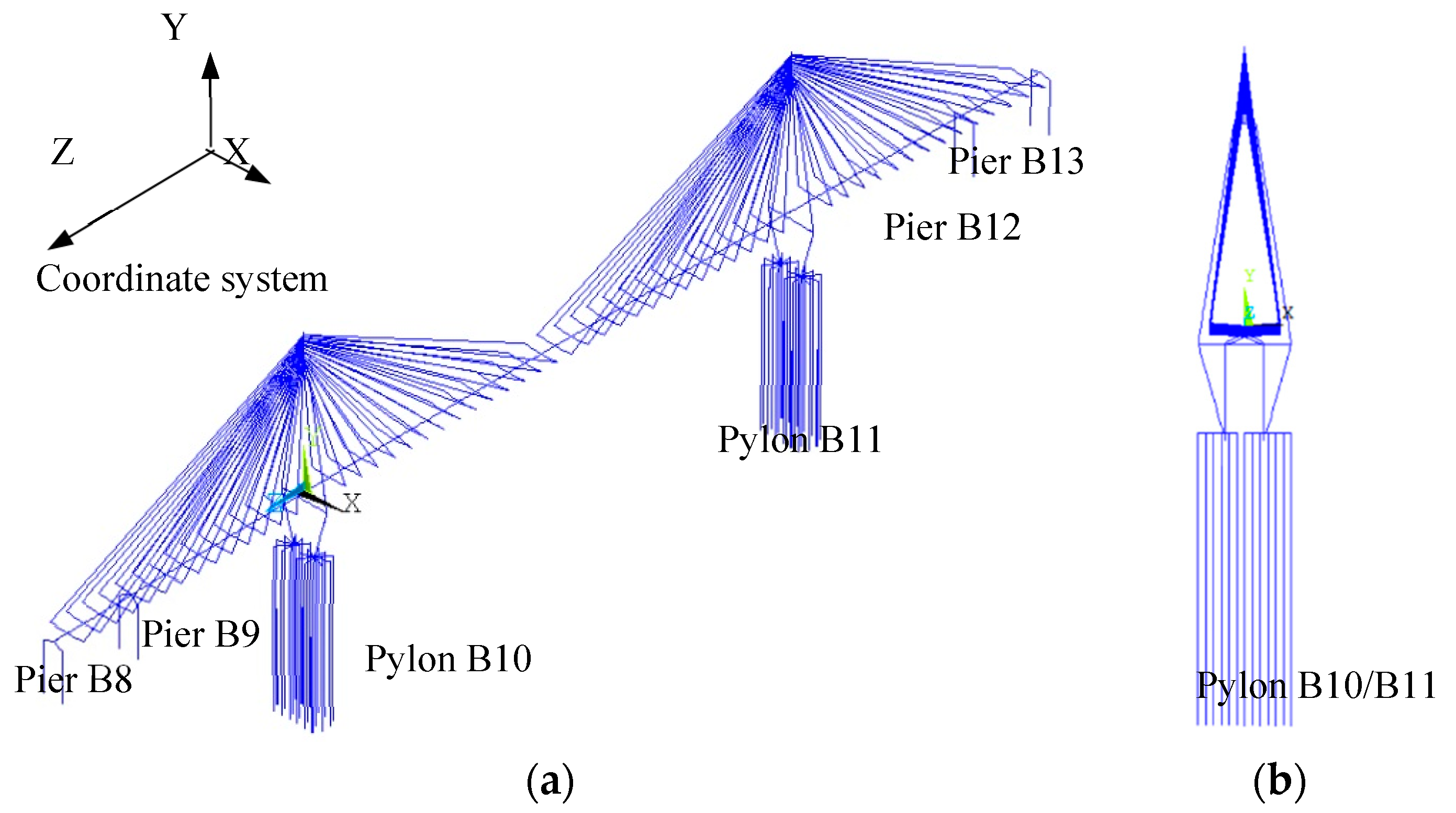
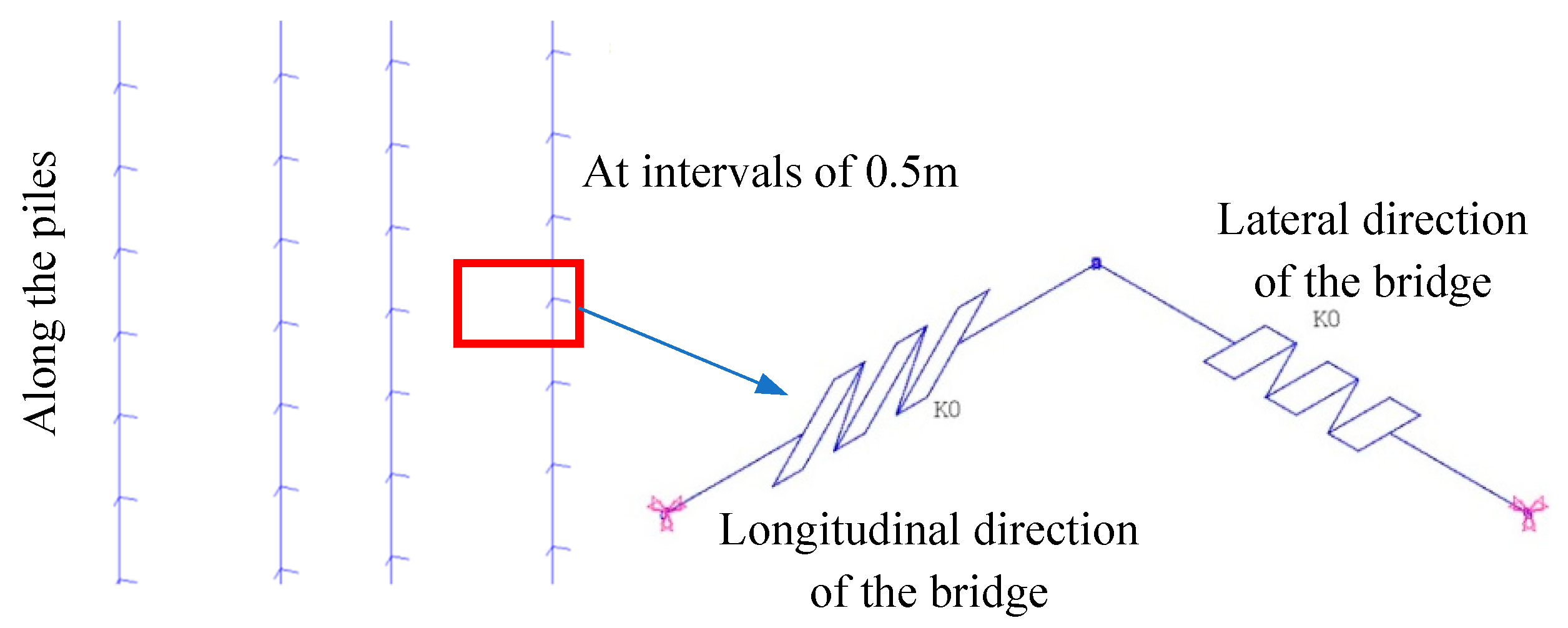
5.1. FE Model Establishment
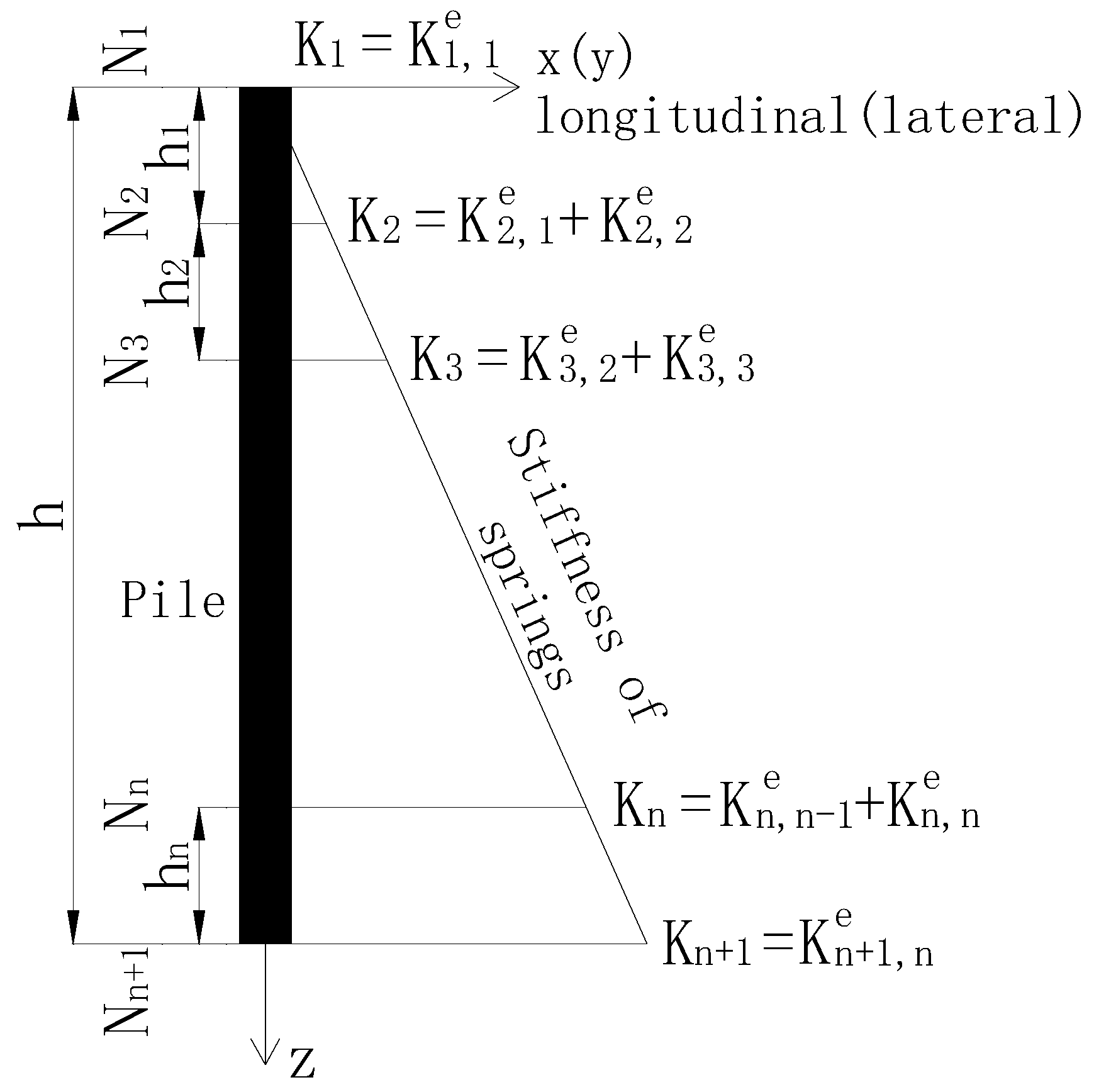
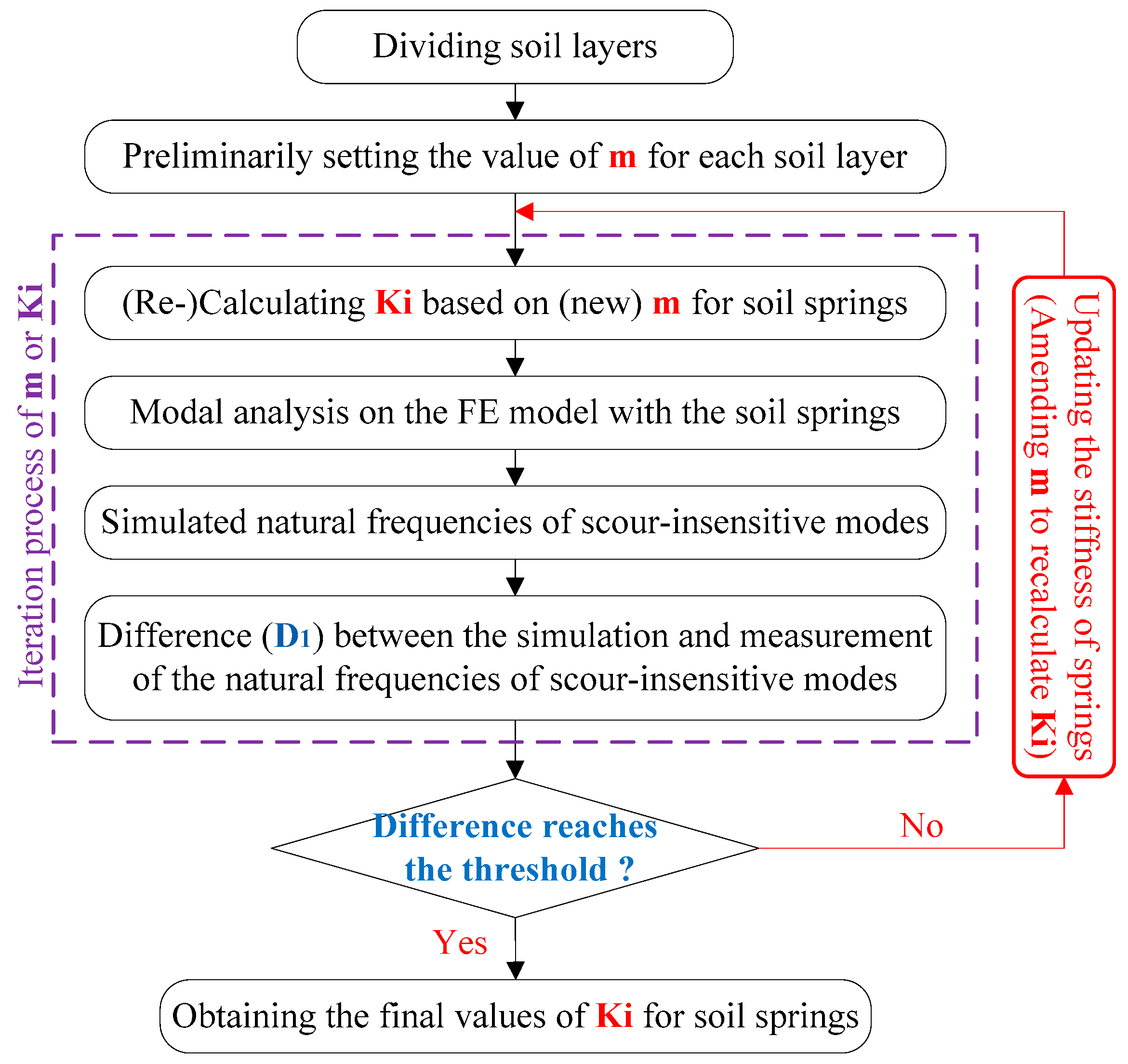
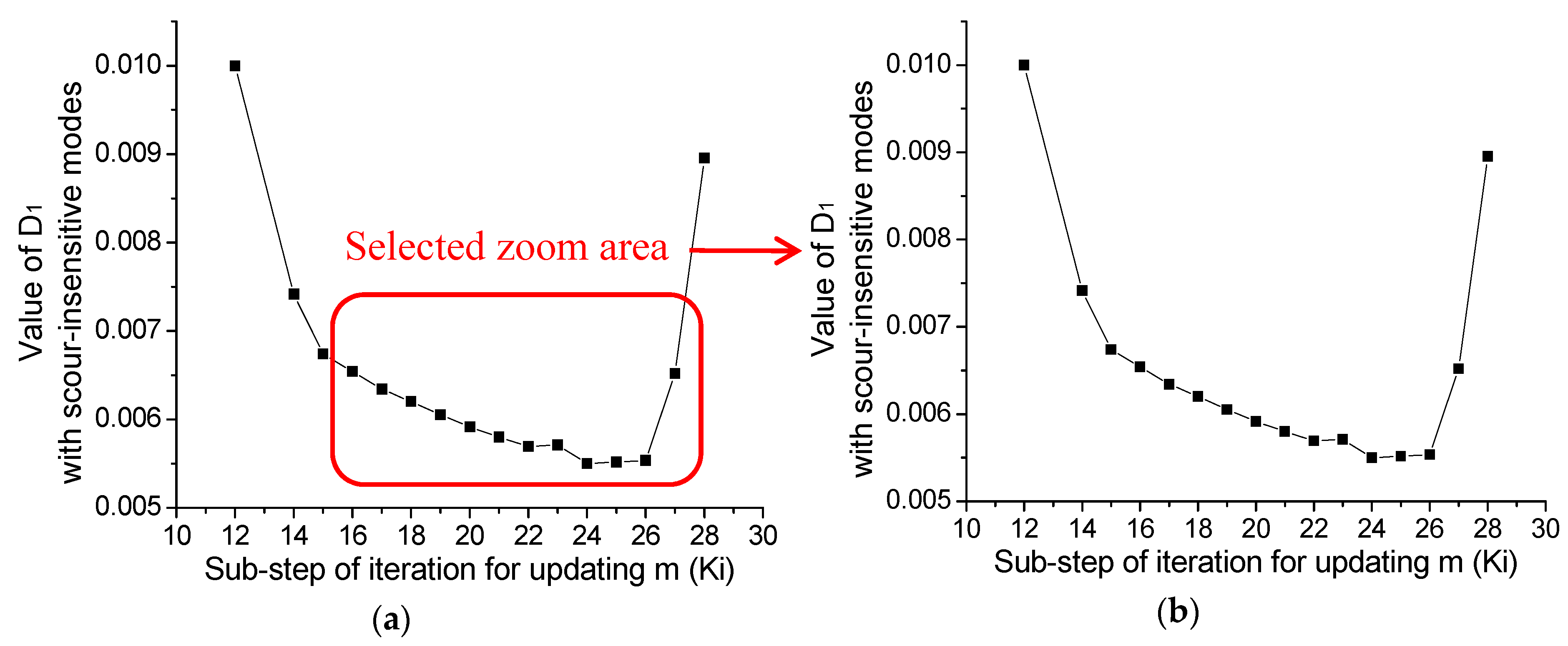
5.2. Identification of Soil Stiffness
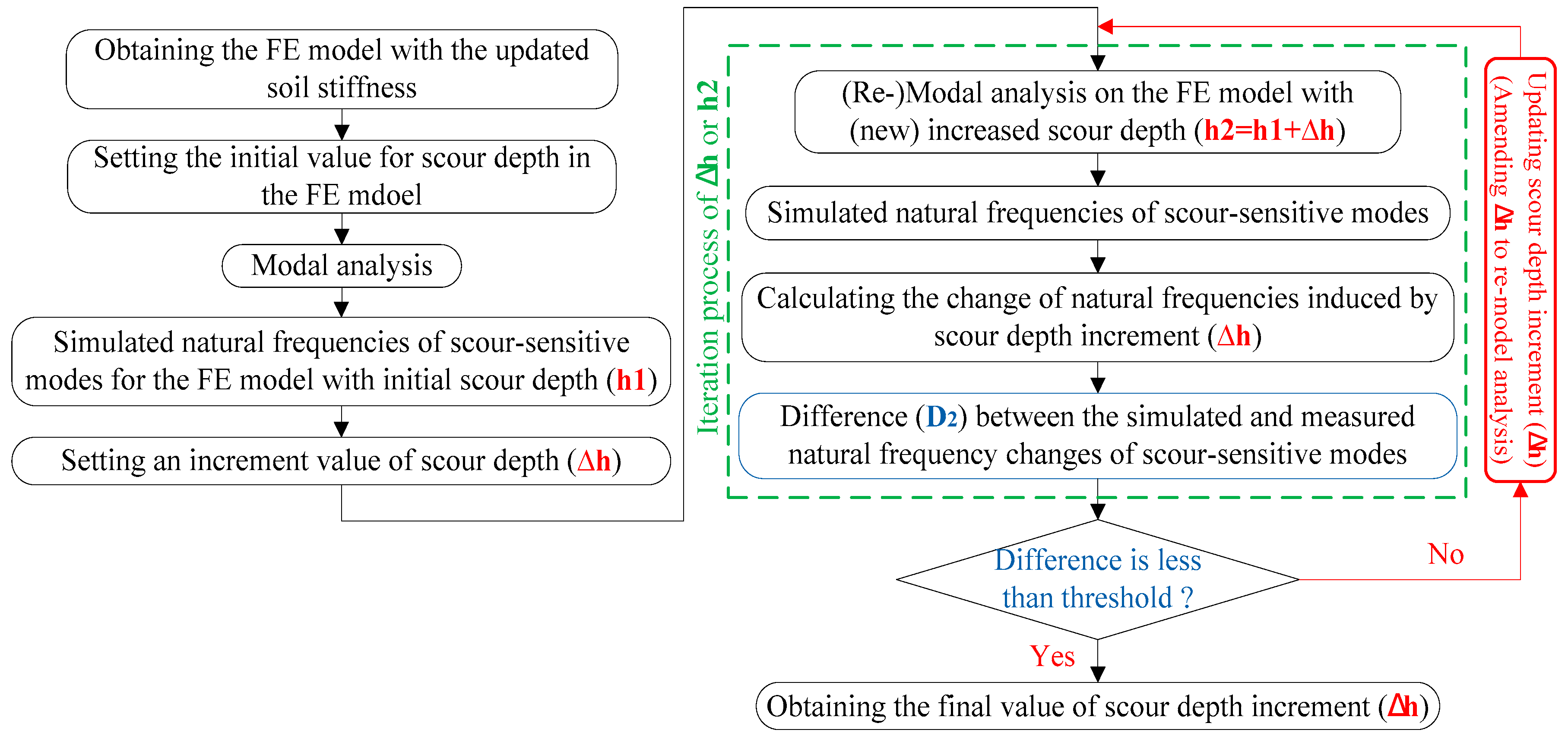
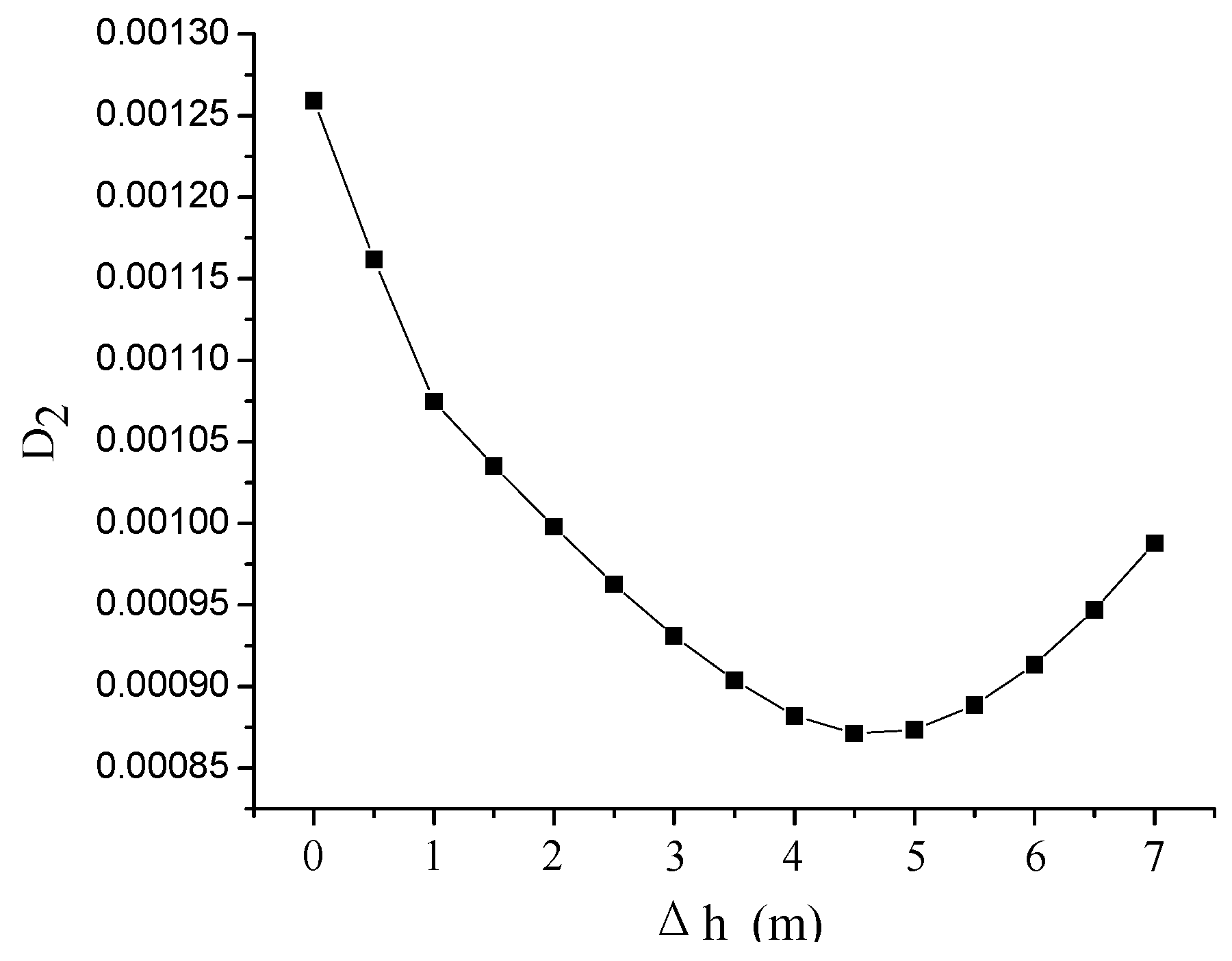
5.3. Identification of Scour Depth (Soil Level)
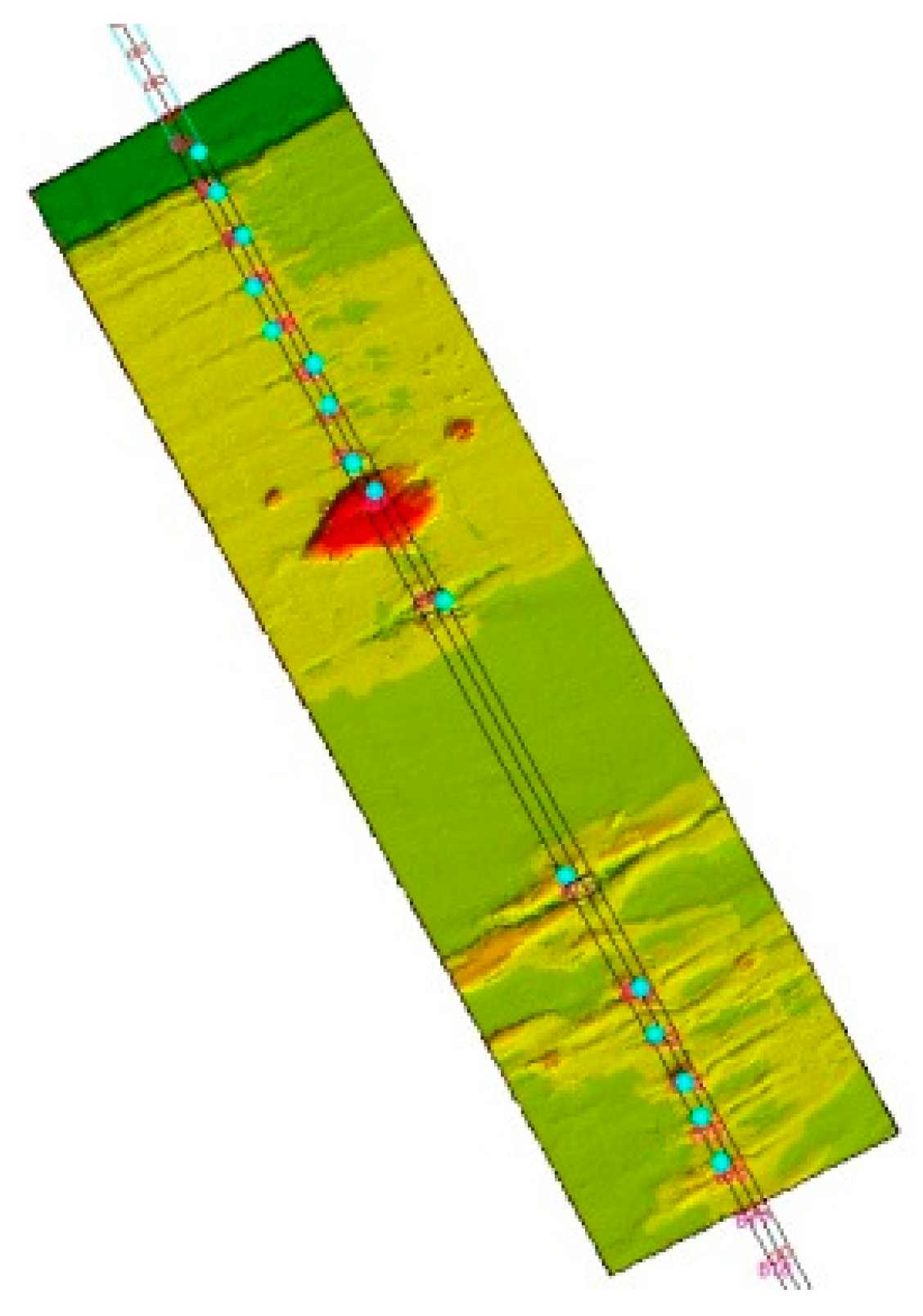
6. Verification by Results from Underwater Terrain Map
7. Concluding Remarks
- (1)
- Methodology improvements: In this study, the variation of mode shapes is incorporated to qualitatively detect the existence of bridge foundation scour, and a new two-step scour identification method was also proposed. By this method the scour is quantitatively identified by best fitting the scour-sensitive vibration modes (the 2nd step) using an FE model whose soil stiffness is pre-updated by best fitting the scour-insensitive modes (the 1st step).
- (2)
- Application improvements: The Hangzhou Bay Bridge, a 908 m cable-stayed bridge, was selected as a case study to comprehensively illustrate the application of this method. Another successful field application is important for this vibration-based scour identification method, which presently happens to significantly lack application for real bridges.
- (1)
- The high-order vibration modes are insensitive to the scour. The low-order vibration modes, especially for the modes of pylon, are very sensitive to the scour. Therefore, the natural frequencies of high and low vibration modes can be used as the tracing targets for updating the soil stiffness and scour depth.
- (2)
- The documented results from the underwater terrain map verify the accuracy of the proposed scour identification based on the ambient vibration measurements.
- (3)
- The proposed qualitative identification method can also be used to narrow down the number of bridges in need of further evaluation, e.g., the quantitative identification. It is noted that the quantitative identification needs enough bridge information to conduct the model updating. Both the qualitative and quantitative identification methods were suggested to be applied accordingly.
- (4)
- Once applied in practice, this vibration-based scour identification does not require any underwater devices and operations and could be easily integrated to a routine assessment task for bridges.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Chen, G.; Schafer, B.; Lin, Z.; Huang, Y.; Suaznabar, O.; Shen, J. Real-time monitoring of bridge scour with magnetic field strength measurement. In Proceedings of the Transportation Research Board 92nd Annual Meeting, Washington, DC, USA, 13–17 January 2013. [Google Scholar]
- Wardhana, K.; Hadipriono, F.C. Analysis of recent bridge failures in the United States. J. Perform. Constr. Facil. 2003, 17, 144–150. [Google Scholar] [CrossRef]
- NTSB (National Transportation Safety Board). Collapse of New York Thruway (1–90) Bridge over the Schoharie Creek, near Amsterdam, New York, April 5, 1987; Highway Accident Rep.: NTSB/HAR-88/02; NTSB: Washington, DC, USA, 1988.
- Lagasse, P.F.; Clopper, P.E.; Zevenbergen, L.W.; Girard, L.G. Countermeasures to Protect Bridge Piers from Scour. National Cooperative Highway Research Program (NCHRP); Rep. No. 593; Transportation Research Board: Washington, DC, USA, 2007. [Google Scholar]
- Kattell, J.; Eriksson, M. Bridge Scour Evaluation: Screening, Analysis, and Countermeasures; Pub. Rep. No. 9877; USDA Forest Service: Washington, DC, USA, 1998.
- NHBBD (Ningbo Hangzhou Bay Bridge Development Co., Ltd.). Monitoring Results for the Local Scour Depth around the Foundation of Hangzhou Bay Bridge; Report No.: 2013–2016; Zhejiang Surveying Institute of Estuary and Coast: Hangzhou, China, 2016. (In Chinese) [Google Scholar]
- Chen, C.-C.; Wu, W.-H.; Shih, F.; Wang, S.-W. Scour evaluation for foundation of a cable-stayed bridge based on ambient vibration measurements of superstructure. NDT E Int. 2014, 66, 16–27. [Google Scholar] [CrossRef]
- Dehghani, A.A.; Esmaeili, T.; Chang, W.Y.; Dehghani, N. 3D numerical simulation of local scouring under hydrographs. In Proceedings Institution of Civil Engineers: Water Management; ICE Publishing: London, UK, 2013; pp. 120–131. [Google Scholar]
- Federal Highway Administration. Evaluating Scour at Bridges. In Hydraulic Engineering Circular No. 18; Rep. No. FHWA-IP-90-017; Federal Highway Administration (FHWA), U.S. Department of Transportation: Washington, DC, USA, 1993. [Google Scholar]
- Froehlich, D.C. Local scour at bridge abutments. In Proceedings of the 1989 National Conference on Hydraulic Engineering, New York, NY, USA, 14–18 August 1989; pp. 13–18. [Google Scholar]
- Melville, B.W.; Sutherland, A.J. Design method for local scour at bridge piers. J. Hydraul. Eng. 1988, 114, 1210–1226. [Google Scholar] [CrossRef]
- Roulund, A.; Sumer, B.M.; Fredsoe, J.; Michelsen, J. Numerical and experimental investigation of flow and scour around a circular pile. J. Fluid Mech. 2005, 534, 351–401. [Google Scholar] [CrossRef]
- Xiong, W.; Cai, C.S.; Kong, B.; Kong, X. CFD Simulations and Analyses for Bridge-Scour Development Using a Dynamic-Mesh Updating Technique. J. Comput. Civ. Eng. 2016, 30, 04014121. [Google Scholar] [CrossRef]
- Xiong, W.; Tang, P.B.; Kong, B.; Cai, C.S. Reliable Bridge Scour Simulation Using Eulerian Two-Phase Flow Theory. J. Comput. Civ. Eng. 2016, 30, 04016009. [Google Scholar] [CrossRef]
- Hong, S.H.; Abid, I. Scour around an Erodible Abutment with Riprap Apron over Time. J. Hydraul. Eng. 2019, 145, 06019007. [Google Scholar] [CrossRef]
- Yang, Y.F.; Melville, B.W.; Sheppard, D.M.; Shamseldin, A.Y. Live-Bed Scour at Wide and Long-Skewed Bridge Piers in Comparatively Shallow Water. J. Hydraul. Eng. 2019, 145, 06019005. [Google Scholar] [CrossRef]
- Deng, L.; Cai, C.S. Bridge Scour: Prediction, Modeling, Monitoring, and Countermeasures-Review. Pract. Period. Struct. Des. Constr. 2010, 15, 125–134. [Google Scholar] [CrossRef]
- Prendergast, L.J.; Gavin, K. A review of bridge scour monitoring techniques. J. Rock Mech. Geotech. Eng. 2014, 6, 138–149. [Google Scholar] [CrossRef]
- Xiong, W.; Cai, C.S.; Kong, X. Instrumentation design for bridge scour monitoring using fiber Bragg grating sensors. Appl. Opt. 2012, 51, 547–557. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Z.; Huang, M.H.; Huang, L.Q.; Ou, J.P.; Chen, G.D. An optical fiber Bragg grating sensing system for scour monitoring. Adv. Struct. Eng. 2011, 14, 67–78. [Google Scholar] [CrossRef]
- Lu, J.-Y.; Hong, J.-H.; Su, C.-C.; Wang, C.-Y.; Lai, J.-S. Field measurements and simulation of bridge scour depth variation during floods. J. Hydraul. Eng. 2008, 134, 810–821. [Google Scholar] [CrossRef]
- Lai, J.S.; Chang, W.Y.; Tsai, W.F.; Lee, L.C.; Lin, F.; Loh, C.H. Multi-lens pier scour monitoring and scour depth prediction. Water Manag. 2014, 167, 88–104. [Google Scholar]
- Lin, Y.B.; Lai, J.S.; Chang, K.C.; Chang, W.S.; Lee, F.Z.; Tan, Y.C. Using MEMS sensors in the bridge scour monitoring system. J. Chin. Inst. Eng. 2010, 33, 25–35. [Google Scholar] [CrossRef]
- De Falco, F.; Mele, R. The monitoring of bridges for scour by sonar and sedimetri. NDT E Int. 2002, 35, 117–123. [Google Scholar] [CrossRef]
- Hunt, B.E. Scour monitoring programs for bridge health. In Proceedings of the 6th International Bridge Engineering Conference Reliability, Security, and Sustainability in Bridge Engineering, Boston, MA, USA, 17–20 July 2005; Transportation Research BoardL: Boston, MA, USA, 2005; pp. 531–536. [Google Scholar]
- Millard, S.G.; Bungey, J.H.; Thomas, C.; Soutsos, M.N.; Shaw, M.R.; Patterson, A. Assessing bridge pier scour by radar. NDT E Int. 1998, 31, 251–258. [Google Scholar] [CrossRef]
- Park, I.; Lee, J.; Cho, W. Assessment of bridge scour and riverbed variation by a ground penetrating radar. In Proceedings of the 10th International Conference on Ground Penetrating Radar, GPR 2004, Delft, The Netherlands, 21–24 June 2004; pp. 411–414. [Google Scholar]
- Farrar, C.R.; Doebling, S.W.; Cornwell, P.J.; Straser, E.G. Variability of modal parameters measured on the Alamosa Canyon Bridge. In Proceedings of the 15th International Modal Analysis Conference (IMAC ’97), Orlando, FL, USA, 3–6 February 1997; pp. 257–263. [Google Scholar]
- Hohn, H.; Dzonczyk, M.; Straser, E.G.; Kiremidjian, A.; Law, K.H.; Meng, T. An experimental study of temperature effect on modal parameters of the Alamosa Canyon Bridge. Earthq. Eng. Struct. Dyn. 1999, 28, 879–897. [Google Scholar]
- Li, H.; Li, S.; Ou, J.; Li, H. Modal identification of bridges under varying environmental conditions: temperature and wind effects. Struct. Control Health Monit. 2010, 17, 495–512. [Google Scholar] [CrossRef]
- Ni, Y.Q.; Hua, X.G.; Fan, K.Q.; Ko, J.M. Correlating modal properties with temperature using long-term monitoring data and support vector machine technique. Eng. Struct. 2005, 27, 1762–1773. [Google Scholar] [CrossRef]
- Roberts, G.P.; Pearson, A.J. Health monitoring of structures-towards a stethoscope for bridges. In Proceedings of the International Seminar on Modal Analysis, Kissimmee, FL, USA, 8–11 February 1999; Volume 2, pp. 947–952. [Google Scholar]
- Zhou, G.D.; Yi, T.H. A Summary Review of Correlations between Temperatures and Vibration Properties of Long-Span Bridges. Math. Probl. Eng. 2014, 2014, 1–19. [Google Scholar] [CrossRef]
- Hua, X.G.; Ni, Y.Q.; Ko, L.M.; Wong, K.Y. Modeling of temperature-frequency correlation using combined principal component analysis and support vector regression technique. J. Comput. Civ. Eng. 2007, 21, 122–135. [Google Scholar] [CrossRef]
- Ren, Y.; Xu, X.; Huang, Q.; Zhao, D.Y.; Yang, J. Long-term condition evaluation for stay cable systems using dead load–induced cable forces. Adv. Struct. Eng. 2019, 22, 1644–1656. [Google Scholar] [CrossRef]
- Xia, Y.; Chen, B.; Weng, S.; Ni, Y.Q.; Xu, Y.L. Temperature effect on vibration properties of civil structures: A literature review and case studies. J. Civ. Struct. Health Monit. 2012, 2, 29–46. [Google Scholar] [CrossRef]
- Xu, X.; Huang, Q.; Ren, Y.; Zhao, D.Y.; Yang, J.; Zhang, D.Y. Modeling and separation of thermal effects from cable-stayed bridge response. J. Bridge Eng. 2019, 24, 04019028. [Google Scholar] [CrossRef]
- Samizo, M.; Watanabe, S.; Fuchiwaki, A.; Sugiyama, T. Evaluation of the structural integrity of bridge pier foundations using microtremors in flood conditions. Q. Rep. RTRI 2007, 48, 153–157. [Google Scholar] [CrossRef]
- Foti, S.; Sabia, D. Influence of foundation scour on the dynamic response of an existing bridge. J. Bridge Eng. 2011, 16, 295–304. [Google Scholar] [CrossRef]
- Zarafshan, A.; Iranmanesh, A.; Ansari, F. Vibration-Based Method and Sensor for Monitoring of Bridge Scour. J. Bridge Eng. 2012, 17, 829–838. [Google Scholar] [CrossRef]
- Prendergast, L.J.; Hester, D.; Gavin, K.; O’Sullivan, J. An investigation of the changes in the natural frequency of a pile affected by scour. J. Sound Vib. 2013, 332, 6685–6702. [Google Scholar] [CrossRef]
- Elsaid, A.; Seracino, R. Rapid assessment of foundation scour using the dynamic features of bridge superstructure. Constr. Build. Mater. 2014, 50, 42–49. [Google Scholar] [CrossRef]
- Kong, X.; Cai, C.S. Scour Effect on Bridge and Vehicle Responses under Bridge-Vehicle-Wave Interaction. J. Bridge Eng. 2016, 21, 04015083. [Google Scholar] [CrossRef]
- Prendergast, L.J.; Hester, D.; Gavin, K. Determining the presence of scour around bridge foundations using vehicle-induced vibrations. J. Bridge Eng. 2016, 21, 04016065. [Google Scholar] [CrossRef]
- Li, H.J.; Liu, S.Y.; Tong, L.Y. Evaluation of lateral response of single piles to adjacent excavation using data from cone penetration tests. Can. Geotech. J. 2019, 56, 236–248. [Google Scholar] [CrossRef]
- MTPRC (Ministry of Transport of the People’s Republic of China). Hydrological Specifications for Survey and Design of Highway Engineering; JTG C30-2015; China Communications Press: Beijing, China, 2015.
- Gimsing, N.J.; Georgakis, C.T. Cable Supported Bridges: Concept and Design, 3rd ed.; Wiley: Hoboken, NJ, USA, 2012. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Riverbed Elevation before Scour (m) | General Scour Depth (m) | Degradational Scour Depth (m) | Local Scour Depth (m) | Riverbed Elevation after Scour (m) |
|---|---|---|---|---|
| Solution 1: Amended Formula 65-1, 65-2 [46] | ||||
| −12.3 | 7 | 10.8 | −30.1 | |
| Solution 2: Formula HEC-18 [9] | ||||
| −12.3 | 0.9 | 7 | 14.9 | −35.1 |
| Solution 3: Scour experiment in a water-tank | ||||
| −12.3 | 21.8 | −34.1 | ||
| Order | Measurement in 2013 | Measurement in 2016 | ||
|---|---|---|---|---|
| Frequency | Mode Shape | Frequency | Mode Shape | |
| 1 | - | 1st LM (girder) | - | 1st LM (girder) |
| 2 | 0.399 | 1st sym-V (girder) | 0.342 | 1st sym-V (girder) |
| 3 | 0.512 | 1st anti-L (pylon) | 0.416 | 1st anti-L (pylon) |
| 4 | 0.578 | 1st anti-V (girder) | 0.502 | 1st anti-V (girder) |
| 5 | 0.683 | 1st sym-L (pylon) | 0.562 | 1st sym-L (pylon) |
| 6 | 0.771 | 2nd sym-V (girder) | 0.744 | 2nd sym-V (girder) |
| 7 | 0.952 | 3rd sym-V (girder) | 0.939 | 3rd sym-V (girder) |
| 8 | 1.091 | 2nd anti-L (pylon) | 1.039 | 2nd anti-L (pylon) |
| 9 | 1.087 | 2nd anti-V (girder) | 1.071 | 2nd anti-V (girder) |
| 10 | 1.341 | 4st sym-V (girder) | 1.334 | 4st sym-V (girder) |
| 11 | 1.588 | 3rd anti-V (girder) | 1.574 | 3rd anti-V (girder) |
| Components | Area (m2) | Principal Bending Moment of Inertia (m4) | Secondary Bending Moment of Inertia (m4) | Torsional Moment of Inertia (m4) | Width (m) | Height (m) |
|---|---|---|---|---|---|---|
| Girder | 1.54 | 182.37 | 2.80 | 7.00 | 37.10 | 3.50 |
| Pylon | 9.02–55.02 | 8.56–157.60 | 52.18–1171.40 | 4.11–578.98 | 3.5–7.5 | 6.0–9.7 |
| Crossbeam | 21.46 | 108.30 | 203.70 | 228.20 | - | - |
| Stay cables | 0.00327–0.009275 | - | - | - | - | - |
| Properties | Density (kg/m3) | Elasticity Modulus (MPa) | Poisson’s Ratio | |
|---|---|---|---|---|
| Components | ||||
| Girder | 10.288 × 103 | 2.10 × 105 | 0.3 | |
| Crossbeam | 10.288 × 103 | 2.10 × 105 | 0.3 | |
| Stay cables | 8.450 × 103 | 1.90 × 105 | 0.3 | |
| Pylon | 2.600 × 103 | 3.50 × 104 | 0.2 | |
| Piers | 2.600 × 103 | 3.30 × 104 | 0.2 | |
| Layer Number | Soil Material | Thickness (m) | Depth (m) | m (kN/m4) |
|---|---|---|---|---|
| ① | Muddy mild clay | 14.01 | 14.01 | 2000 |
| ② | Muddy clay | 5.41 | 19.42 | 2000 |
| ③ | Clay | 4.96 | 24.38 | 3000 |
| ④ | Mild clay | 5.62 | 30 | 3500 |
| ⑤ | Clayey silt | 31 | 61 | 4000 |
| ⑥ | Clay | 9.17 | 70.17 | 3000 |
| ⑦ | Mild clay | 3.91 | 74.08 | 3000 |
| ⑧ | Silty sand | 12.49 | 86.57 | 5000 |
| ⑨ | Mild clay | 7.14 | 93.71 | 3500 |
| ⑩ | Clay | 4.98 | 98.69 | 3000 |
| ⑪ | Silty sand | 17.18 | 115.87 | 5000 |
| Layer Number | Soil Material | m (kN/m4) | Node Numbers of Single Pile |
|---|---|---|---|
| ① | Muddy mild clay | 4400 | 0–28 |
| ② | Muddy clay | 4400 | 29–39 |
| ③ | Clay | 5400 | 40–49 |
| ④ | Mild clay | 5900 | 50–60 |
| ⑤ | Clayey silt | 6400 | 61–122 |
| ⑥ | Clay | 5400 | 123–140 |
| ⑦ | Mild clay | 5400 | 141–148 |
| ⑧ | Silty sand | 7400 | 149–173 |
| ⑨ | Mild clay | 5900 | 174–187 |
| ⑩ | Clay | 5400 | 188–197 |
| ⑪ | Silty sand | 7400 | 198–232 |
| Node Numbers of Single Pile | K (103 kN/m) | Node Numbers of Single Pile | K (103 kN/m) | Node Numbers of Single Pile | K (103 kN/m) | |||
|---|---|---|---|---|---|---|---|---|
| Layer ① | 0 | 0.4578 | Layer ⑤ | 60 | 240.5908 | Layer ⑧ | … | … |
| 1 | 4.1201 | 61 | 247.7074 | 173 | 647.3823 | |||
| … | … | 62 | 251.7026 | Layer ⑨ | 174 | 624.7812 | ||
| 28 | 79.6559 | … | … | 175 | 628.3514 | |||
| Layer ② | 29 | 82.4027 | 122 | 414.2214 | … | … | ||
| 30 | 85.1494 | Layer ⑥ | 123 | 405.1850 | 187 | 671.1936 | ||
| … | … | 124 | 408.4526 | Layer ⑩ | 188 | 674.7637 | ||
| 39 | 130.7830 | … | … | 189 | 678.3339 | |||
| Layer ③ | 40 | 138.2117 | 140 | 496.3355 | … | … | ||
| 41 | 141.5827 | Layer ⑦ | 141 | 506.9653 | 197 | 856.8126 | ||
| … | … | 142 | 510.5355 | Layer ⑪ | 198 | 891.0923 | ||
| 49 | 181.6084 | … | … | 199 | 895.5702 | |||
| Layer ④ | 50 | 187.8406 | 148 | 644.8105 | … | … | ||
| 51 | 191.5237 | Layer ⑧ | 149 | 671.6777 | 232 | 520.9233 | ||
| … | … | 150 | 676.1555 | |||||
| Δh (m) | Contribution of the 2nd order (Hz) | Contribution of the 3rd order (Hz) | Contribution of the 4th order (Hz) | Contribution of the 5th order (Hz) | D2 |
|---|---|---|---|---|---|
| 0 | 0.010290 | −0.00965 | −0.000916 | −0.032545 | 0.001259 |
| 0.5 | 0.010844 | −0.00858 | −0.000283 | −0.031154 | 0.001162 |
| 1 | 0.011381 | −0.00754 | 0.000338 | −0.029802 | 0.001075 |
| 1.5 | 0.011662 | −0.00703 | 0.000660 | −0.029139 | 0.001035 |
| 2 | 0.011941 | −0.00653 | 0.000982 | −0.028489 | 0.000998 |
| 2.5 | 0.012232 | −0.00603 | 0.001316 | −0.027839 | 0.000963 |
| 3 | 0.012553 | −0.00554 | 0.001684 | −0.027202 | 0.000931 |
| 3.5 | 0.012931 | −0.00506 | 0.002121 | −0.026578 | 0.000904 |
| 4 | 0.013432 | −0.00458 | 0.002696 | −0.025951 | 0.000882 |
| 4.5 | 0.014141 | −0.00411 | 0.003513 | −0.025338 | 0.000871 |
| 5 | 0.015081 | −0.00364 | 0.004593 | −0.024732 | 0.000873 |
| 5.5 | 0.016170 | −0.00319 | 0.005847 | −0.024145 | 0.000889 |
| 6 | 0.017323 | −0.00273 | 0.007169 | −0.023549 | 0.000913 |
| 6.5 | 0.018492 | −0.00228 | 0.008515 | −0.022964 | 0.000947 |
| 7 | 0.019654 | −0.00184 | 0.009849 | −0.022392 | 0.000988 |
| Order | Measured Frequency Change/Difference from 2013 to 2016 | Simulate Frequency Change/Difference by Adding 4.5 m Scour Depth |
|---|---|---|
| 2 | 0.057 | 0.071 |
| 3 | 0.096 | 0.092 |
| 4 | 0.076 | 0.079 |
| 5 | 0.121 | 0.121 |
| Foundation | Terrain Elevation in 2013 (m) | Terrain Elevation in 2016 (m) | Scour Depth Developments (m) |
|---|---|---|---|
| Pier B9 (North side pier) | −19.4 | −23.4 | 4 |
| Pylon B10 (North pylon) | −20.2 | −25.4 | 5.2 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiong, W.; Cai, C.S.; Kong, B.; Zhang, X.; Tang, P. Bridge Scour Identification and Field Application Based on Ambient Vibration Measurements of Superstructures. J. Mar. Sci. Eng. 2019, 7, 121. https://doi.org/10.3390/jmse7050121
Xiong W, Cai CS, Kong B, Zhang X, Tang P. Bridge Scour Identification and Field Application Based on Ambient Vibration Measurements of Superstructures. Journal of Marine Science and Engineering. 2019; 7(5):121. https://doi.org/10.3390/jmse7050121
Chicago/Turabian StyleXiong, Wen, C.S. Cai, Bo Kong, Xuefeng Zhang, and Pingbo Tang. 2019. "Bridge Scour Identification and Field Application Based on Ambient Vibration Measurements of Superstructures" Journal of Marine Science and Engineering 7, no. 5: 121. https://doi.org/10.3390/jmse7050121
APA StyleXiong, W., Cai, C. S., Kong, B., Zhang, X., & Tang, P. (2019). Bridge Scour Identification and Field Application Based on Ambient Vibration Measurements of Superstructures. Journal of Marine Science and Engineering, 7(5), 121. https://doi.org/10.3390/jmse7050121