1. Introduction
In the sea around the Korean peninsula, especially in the West Sea also known as the Yellow Sea, strong sea currents usually pose tough technical challenges in the salvage operations as well as in the various scientific activities. In both cases of ROKS Cheonan sinking on 26 March 2010 [
1] and sinking of MV Sewol on 16 April 2014 [
2], one of the most difficult problems during the initial response for salvage was that there was not any underwater vehicle able to be deployed in the strong sea current environment [
3] so as to collect the swift on-site disaster scene information. Recently, how to overcome strong sea current has become a hot topic in the UUV community, especially in Korea. In [
4], a ROV called Crabster CR200 was introduced. The vehicle has about 188 kg of negative buoyancy in the water. So in the case of strong current which can be up to 3 knots, the vehicle can land on the sea floor and using its 6 legs can resist the current. In [
5], the authors presented a two-body vehicle, where the lower body can land on the sea floor and overcome strong current using a sort of anchor system. In both cases, the whole vehicle or part of the body should be land on the sea floor to resist the sea current. This kind of mechanism might constrain the vehicle’s precise underwater inspection capability. Other attempts to counter strong turbulence using the high velocity water itself include [
6].
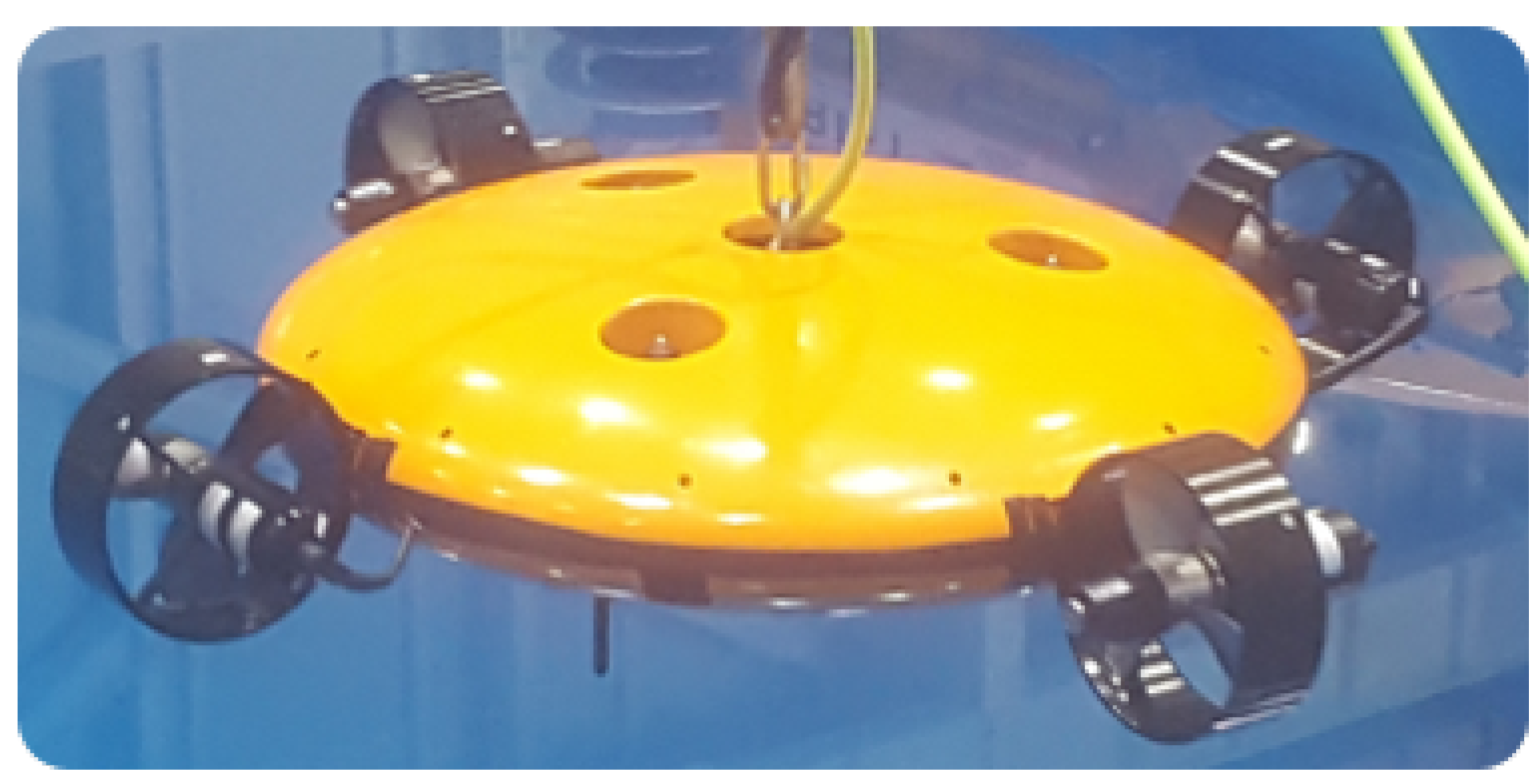
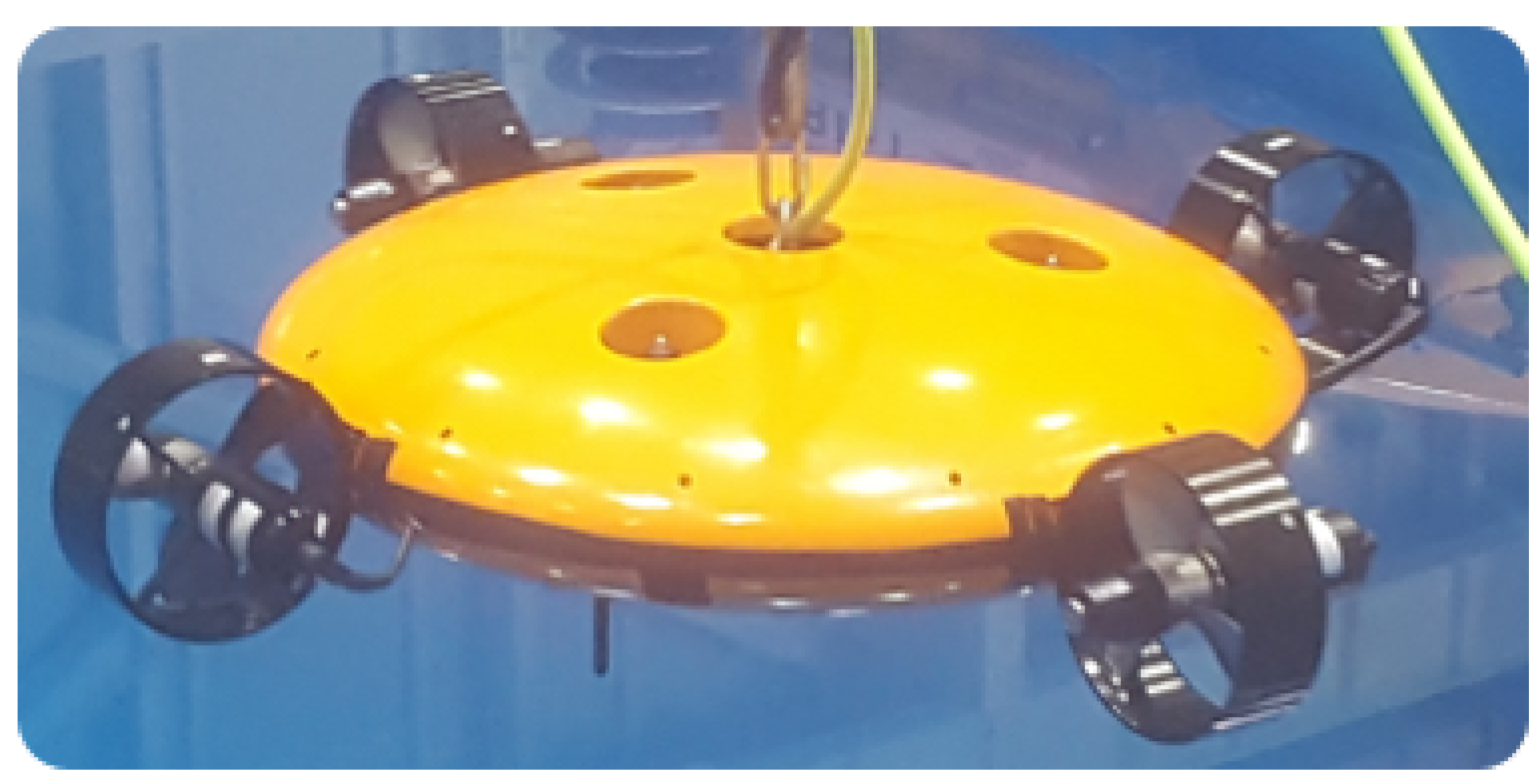
This paper presents the development of a UUV platform and its motion control technology for the purpose of overcoming strong sea current. The vehicle has the flattened ellipsoidal exterior to minimize the hydrodynamic damping in the water, as seen in
Figure 1. Four horizontal thrusters with the identical specification are mounted symmetrically on the horizontal plane. Each thruster has the same thrust dynamics in both forward and reverse directions. This kind of horizontal thrust mechanism can guarantee the uniform distribution of vectored thrust forces in all horizontal directions. On the other hand, this is also beneficial for easily stabilizing the vehicle’s horizontal motion in the dynamic sea current environment. Three vertical thrusters, as seen in
Figure 1, are used to stabilize the vehicle’s roll, pitch, and heave motions.
The control strategy for this vehicle to overcome strong current is to maximize the vectored horizontal thrust force along certain direction, usually against the sea current, while keeping its heading or with the least of heading rotation on the horizontal plane. Three vertical thrusters, as mentioned before, are used to stabilize the roll, pitch and heave motion. General PD controllers [
7,
8] are designed independently for each of the horizontal and vertical thrusters groups.
Some of the simulation and experimental studies are carried out to demonstrate the performance of the platform design and its motion control technologies. In the simulation, the hydrodynamic coefficients are calculated through both of the theoretical and empirically-derived formulas [
9,
10,
11]. Furthermore, in the controller design, four horizontal thrusters are modeled under the consideration of the fact that the maximum thrust force will be reduced in compliance with the increasing of fluid speed flow through the thruster [
12,
13]. In addition, through circulating water channel test, it is observed that the vehicle can get forward motion while keeping its heading in the strong current environment where the current is up to 2.5 knots.
The remainder of this paper is organized as follows.
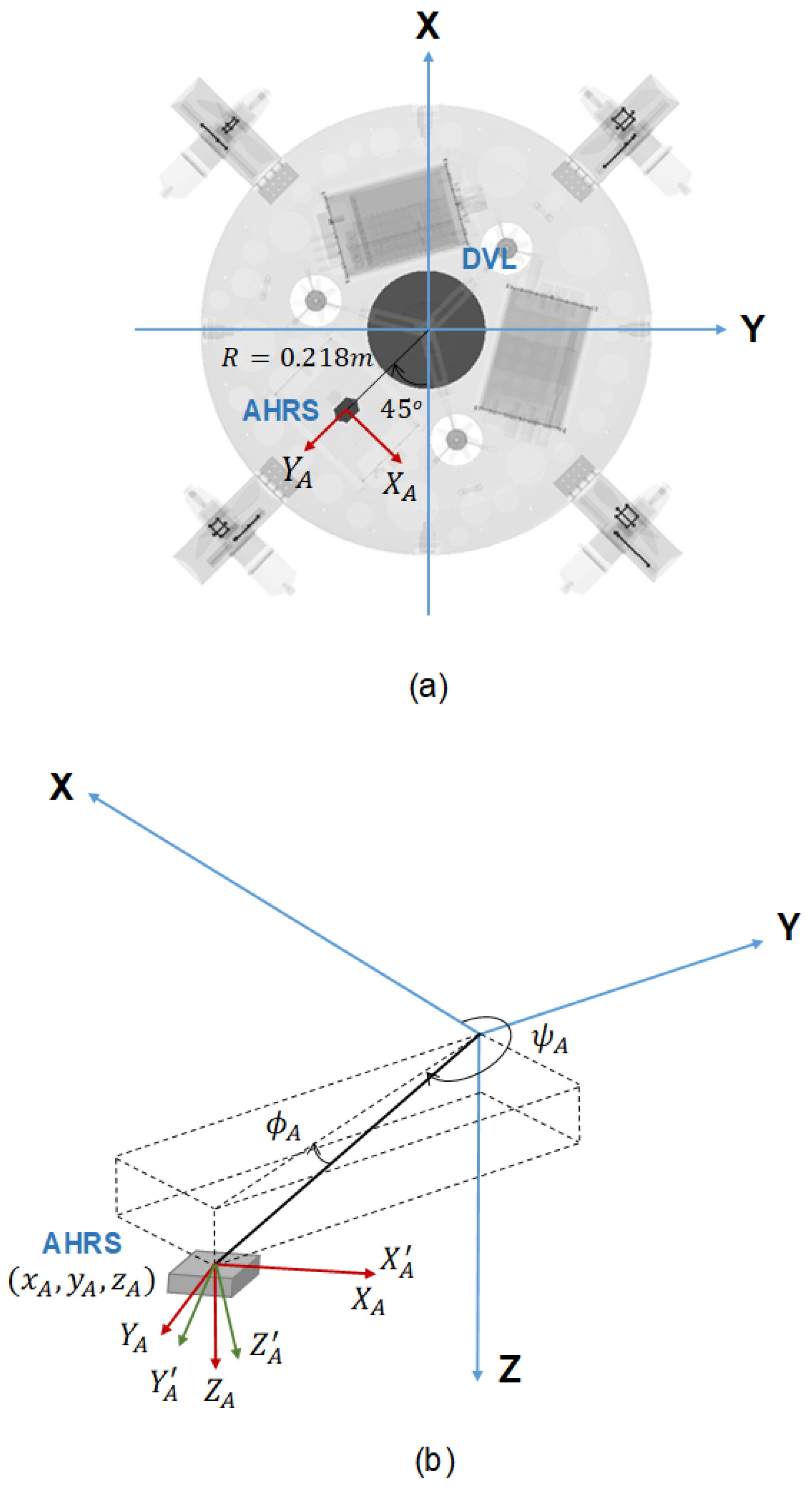
Section 2 describes the vehicle’s kinematic and hydrodynamic model, and the vehicle motion sensor’s lever arm effects are considered in
Section 3. Controllers for both of horizon keeping and maximum forward speed on the horizontal plane are presented in
Section 4. Furthermore,
Section 5 shows the simulation result, while experimental studies are presented in
Section 6. A brief conclusion and some future works are discussed in
Section 7.
4. Control Design
As mentioned before, the control strategy proposed in this paper to overcome strong current is to maximize the vectored horizontal thrust force along the direction against the current, while keeping the vehicle’s heading or with the minimum heading rotation. To do so, it needs to spread the vectored horizontal thrust force on the horizontal plane as uniformly as possible.
4.1. Maximum Horizontal Vectored Thrust Force
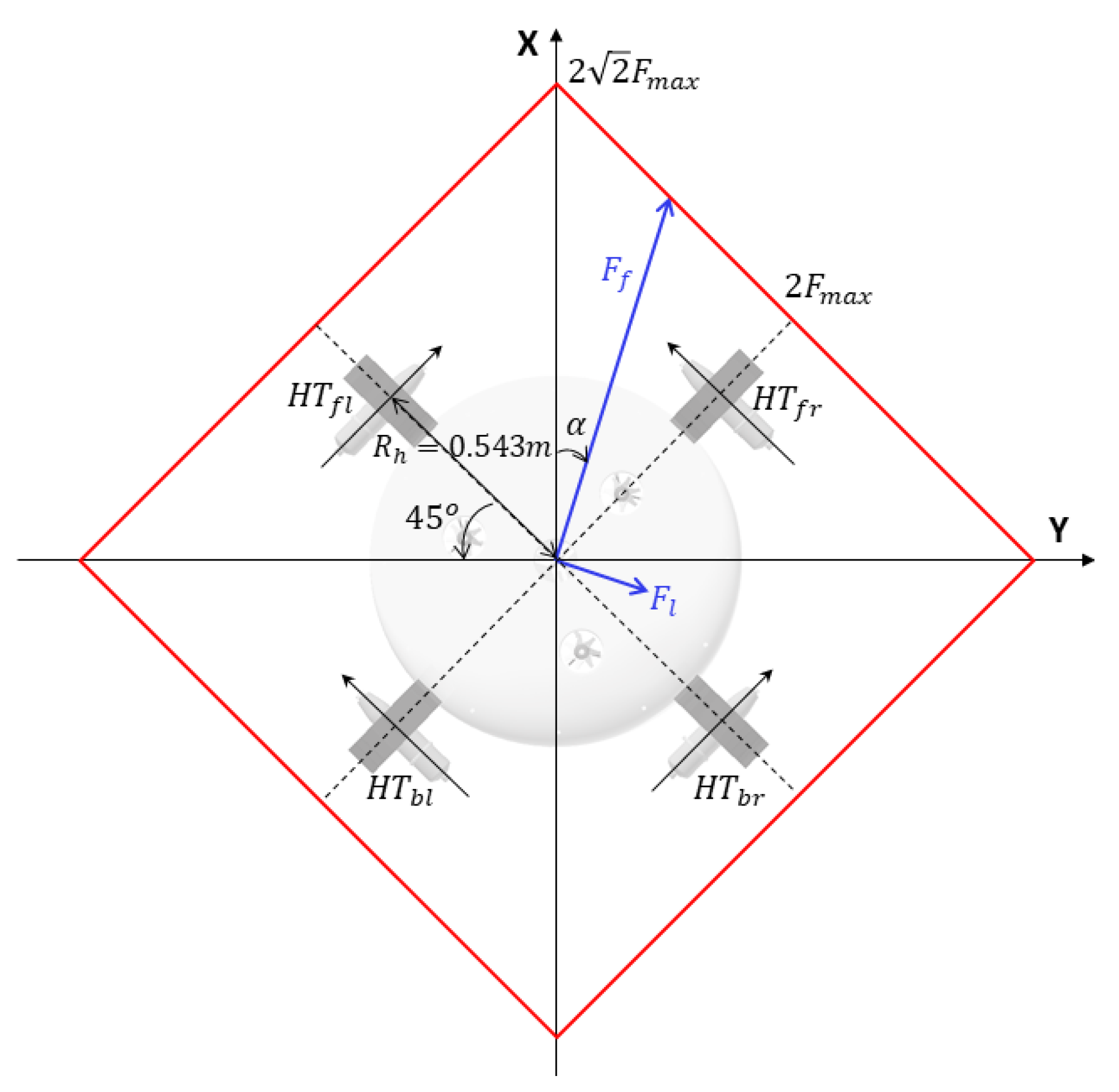
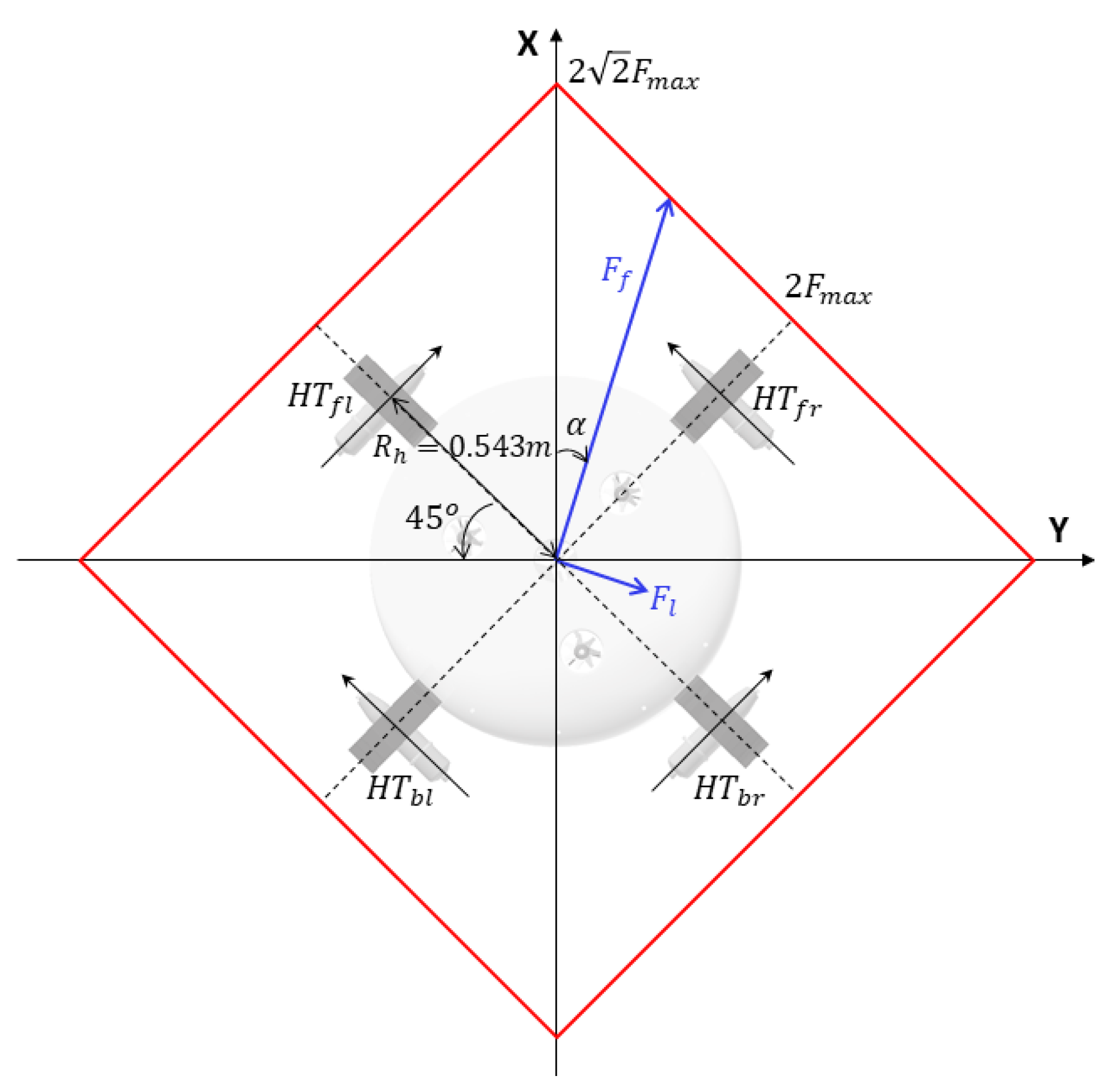
As shown in
Figure 3, four horizontal thrusters are mounted symmetrically around the ellipsoidal shape of platform. Each of the thrusters has the same forward and reverse thrust dynamics.
Definition 1. Given the direction α as seen in Figure 3, the maximum horizontal vectored thrust force means the maximum of caused by four symmetrically mounted horizontal thrusters with the following properties - P1.
The orthogonal component .
- P2.
Horizontal rotation moment is zero.
Remark 3. In the case of maximum horizontal vectored thrust force, it has and where denotes the thrust force for thruster with . For example, consider the case . To maximize , the thrusters and have to take the maximum of forward thrusts. Due to the fact that these four thrusters have the same thrust dynamics, it has with the maximum thrust force provided by one thruster. On the other hand, in order to satisfy the P1 and P2 in Definition 1, the remainder thrusters have to set as .
Lemma 1. Given four of the symmetrically mounted horizontal thrusters as shown in Figure 3, the maximum horizontal vectored thrust force can be calculated as follows Proof of Lemma 1. From
Figure 3, it is easy to get
where
and
.
In order for
with (20), it has
Therefore,
and
cannot be taken the maximum value at the same time if
. In the case of
, it has
. Substituting
into (19), it can be get
In the case
, it has
and if
then
. Therefore, (22) can be rewritten as
Similarly, in the case of
, substituting
into (19), have
If
, then
, and if
, then
. Consequently, (24) can be rewritten as
Combining (23) and (25) can conclude the
Proof.
Remark 4. Calculated maximum horizontal vectored thrust force field is the red-colored square shown in Figure 3. The maximum vectored thrust force is and minimum value is . It is easy to see that to align the maximum vectored thrust force with the opposite direction of arbitrarily given sea current, the vehicle’s maximum rotation angle is less than . 4.2. Maximum Forward Speed Controller with Heading-Keeping
One of the important target specifications of this project is the vehicle’s maximum forward speed while keeping its heading angle. Proposed control law is as follows:
where with the reference heading and with and control gain parameters.
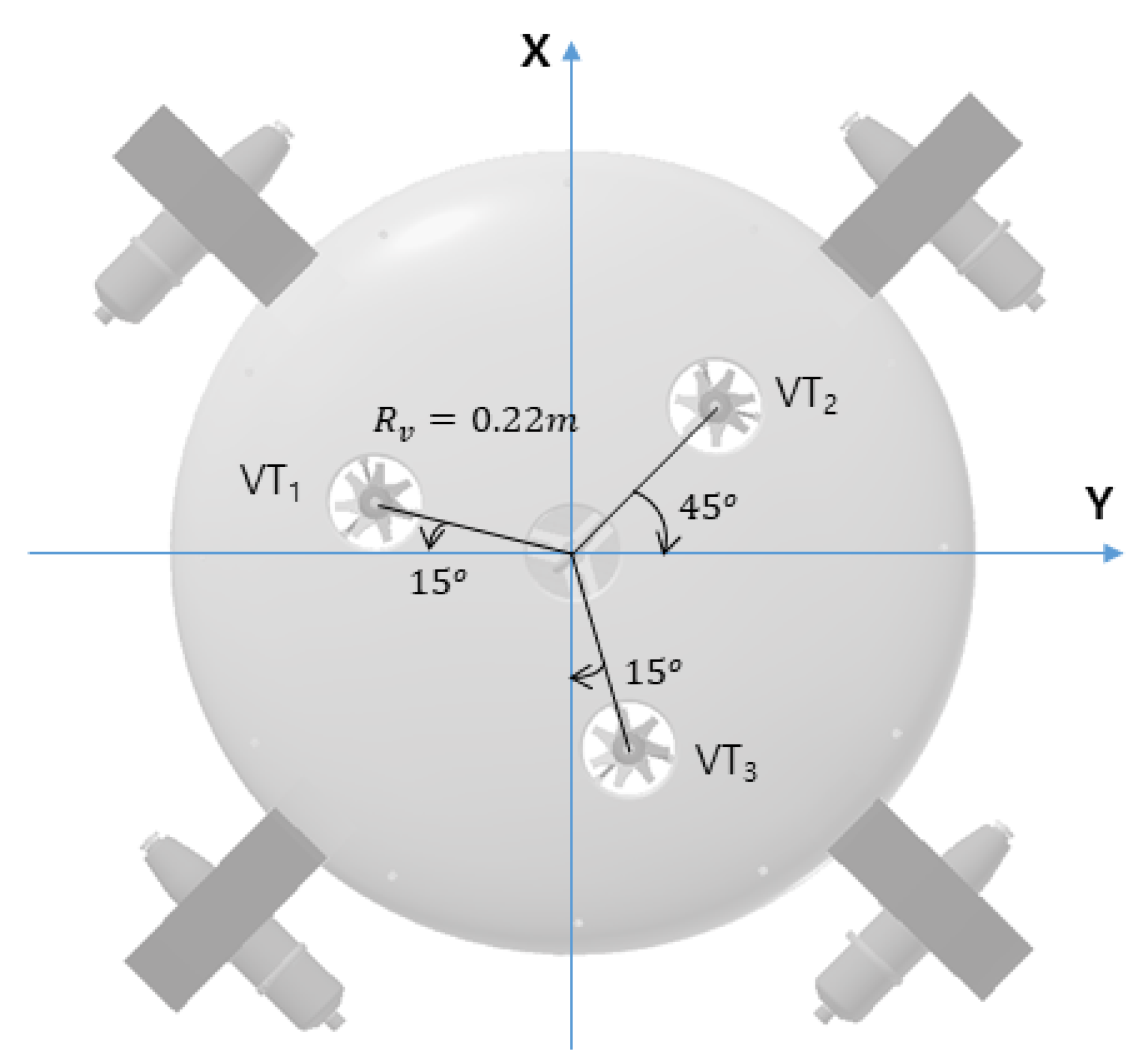
4.3. Horizon Keeping Controller
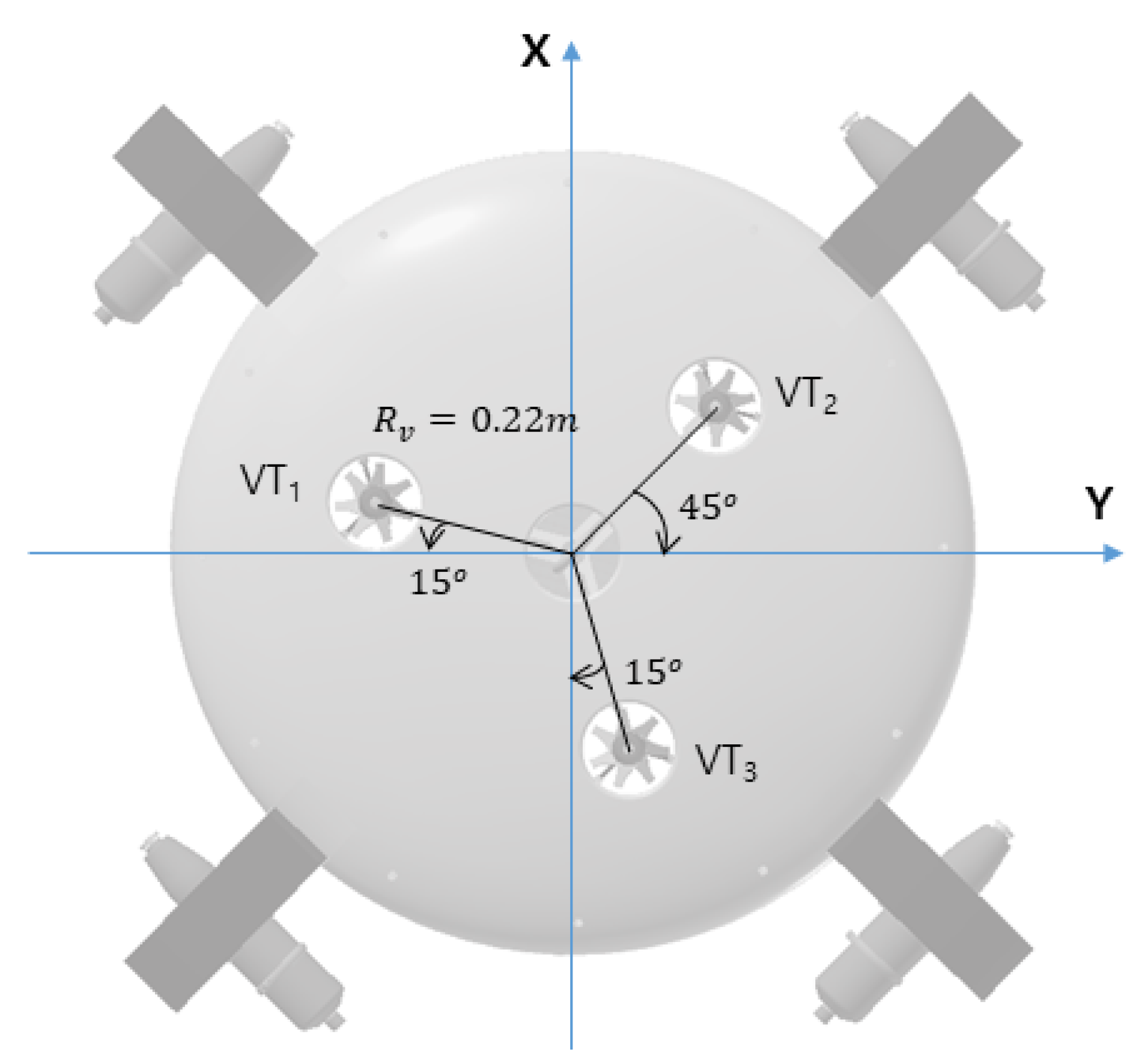
Three vertical thrusters are mounted as seen in
Figure 4.
4.3.1. Roll Motion Control
The roll motion control component for
is designed as
where
is the reference roll angle,
and
are two gain parameters.
In the case of roll motion control, the remainder of two control components and are designed through simultaneously satisfying the following two conditions
- C1.
.
- C2.
.
Remark 5. Here, C1 is the condition to balance the right and left torques about the X-axis, and C2 is to neutralize the pitch torque during the roll motion control.
Combining C1 and C2, it is easy to get
4.3.2. Pitch Motion Control
The design procedure is similar to the roll motion control. First, the pitch motion control component for
is chosen as
where
is the reference pitch angle.
Control law for other two vertical thrusters is to simultaneously satisfying the following two conditions
- C3.
.
- C4.
.
Remark 6. Here C3 is to balance the pitch torque about the Y-axis, and C4 is to neutralize the roll torque during the pitch motion control.
Remark 7. In both of roll and pitch motion controls, any of three vertical thrusters can be selected and designed its thrust force using (26) or (29), and other two thrusters are designed through simultaneously satisfying C1 and C2, or C3 and C4. In the case of horizon keeping, and can be simply set as zero values.
4.3.3. Depth Control
The following simple PD controller is designed for depth control
where
is the depth control component for the thruster
,
is the reference depth, and
and
are gain parameters.
4.4. Thruster Models
4.4.1. Vertical Thruster Model
For each vertical thruster, its thrust versus input relationship is as follows [
27]
where
is the saturation function.
Consequently, the thrust force provided by each vertical thruster can be calculated as
Remark 8. In most of the practical cases, the vehicle takes low speed motion in the vertical direction. For this reason, in the case of vertical thrusters, it is not considered the effect where the thruster’s maximum thrust force decreases in compliance with the increase of the fluid speed flow through the thruster [12]. 4.4.2. Horizontal Thruster Model
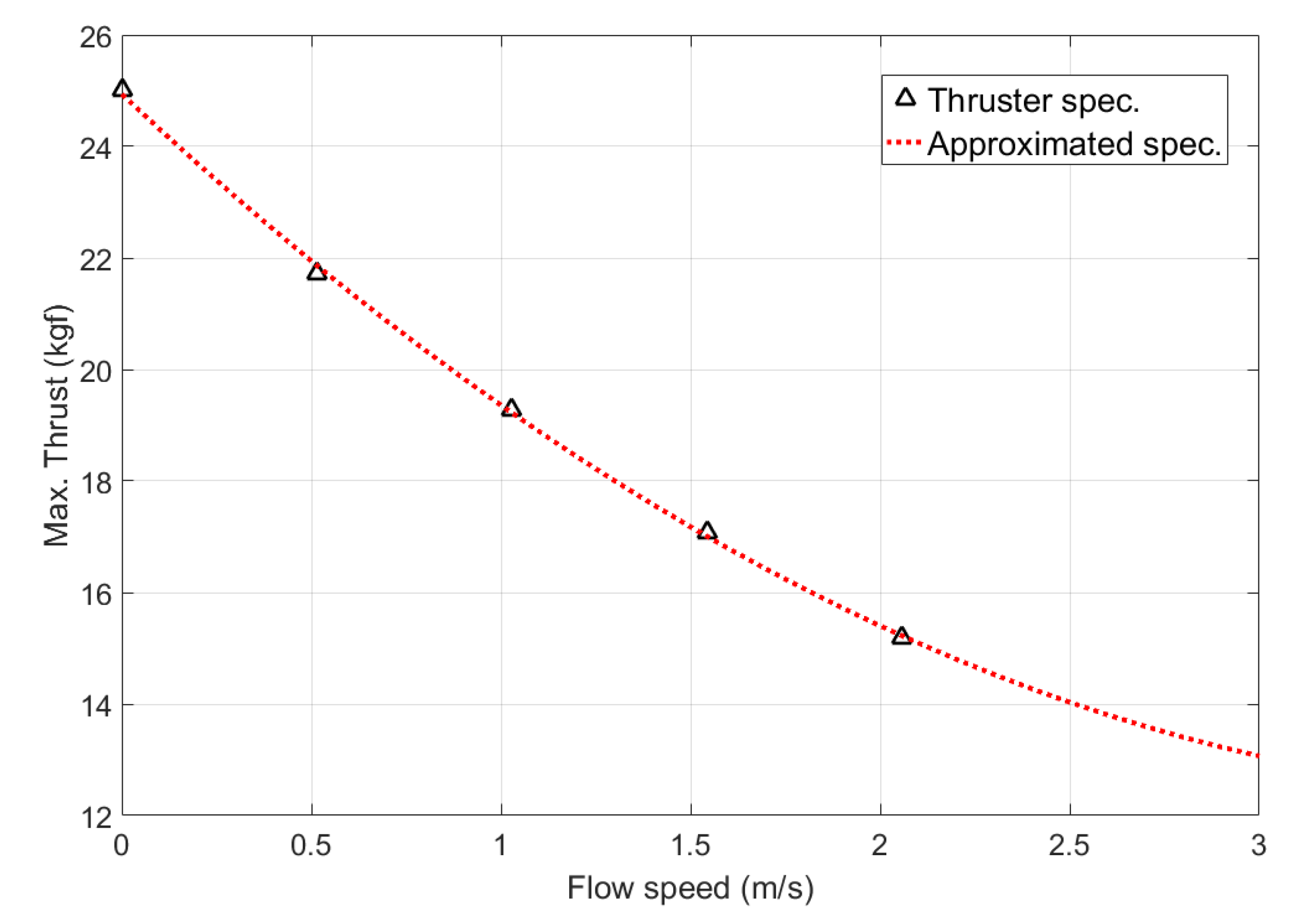
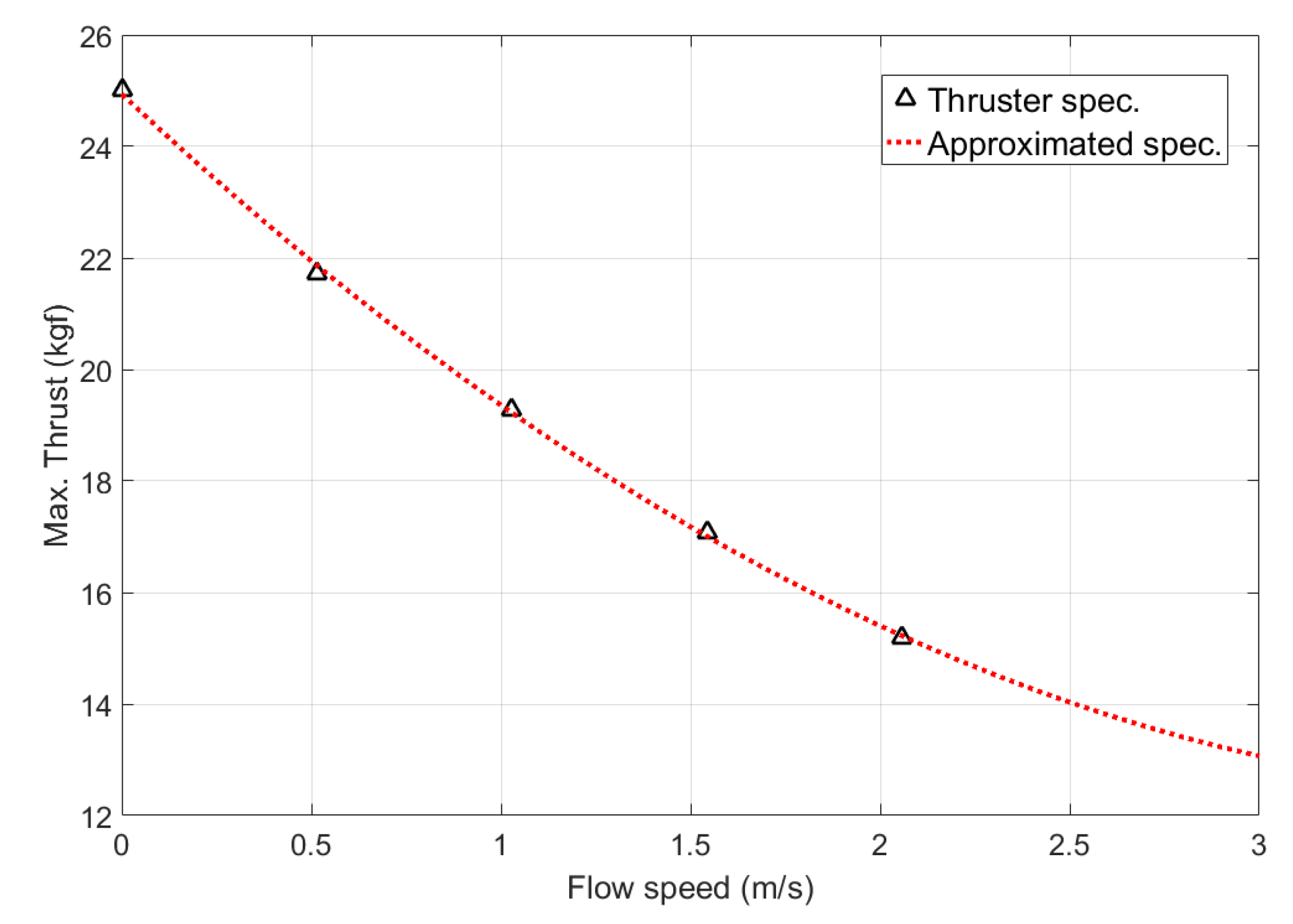
In the case of horizontal thrusters, the fact that the thruster’s maximum thrust force decreases in compliance with the increase of fluid speed flow through the thruster has to be considered.
According to the thruster’s specifications [
13], the approximated relationship between the thruster maximum thrust force versus fluid flow speed (red dotted line in
Figure 5) can be obtained as follows
where
denotes the maximum thrust force with the unit N,
m/s
is the standard gravity, and
U is the fluid speed flow through the thruster.
According to
Figure 3, fluid speed for each of the four horizontal thrusters can be approximated using DVL measurement as follows
As mentioned before, the horizontal thruster has the same forward and reverse dynamics which can be expressed as follows
4.5. Calculation of
Consequently, the control force
in (6) can be calculated as follows
5. Simulation Studies
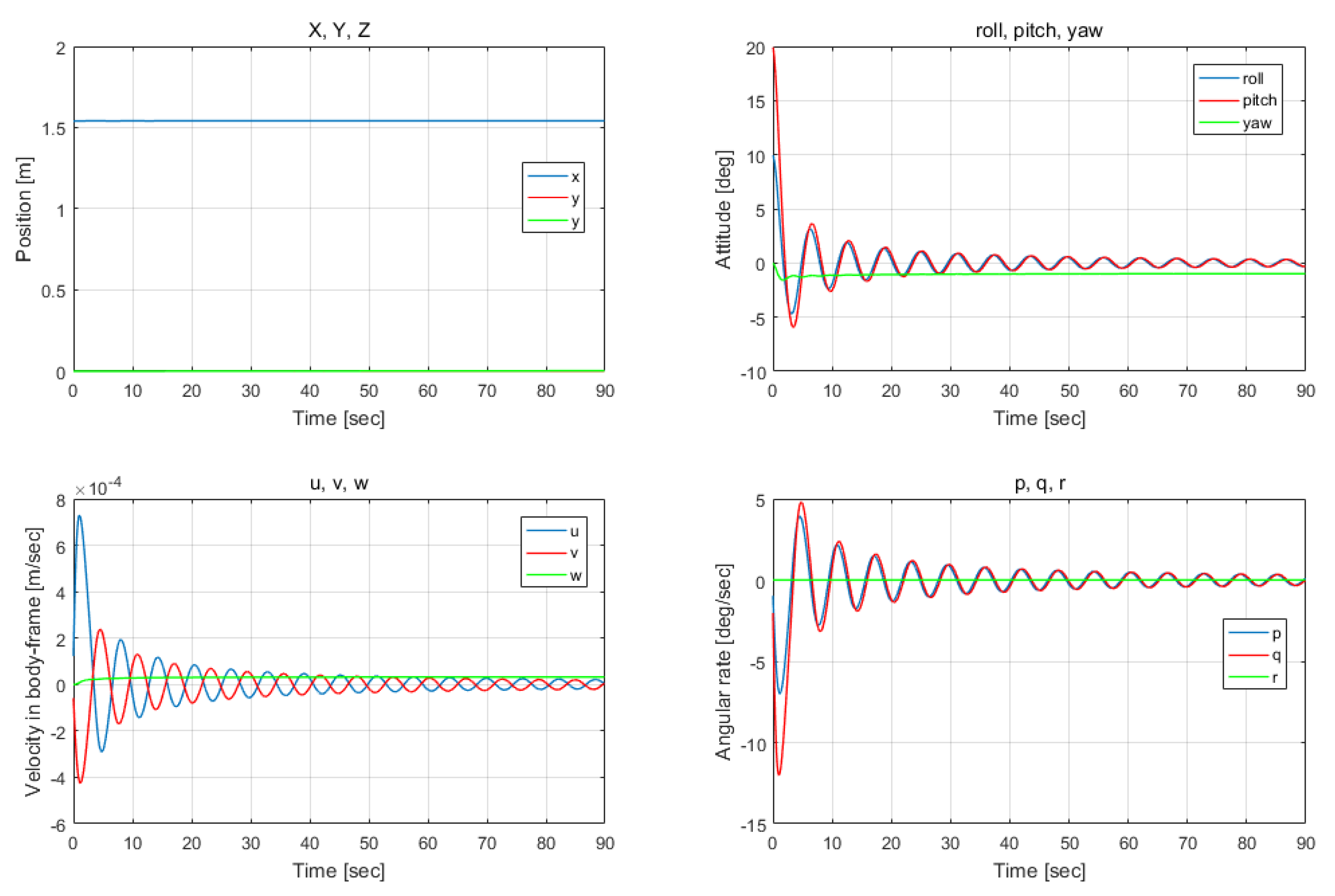
First, the vehicle’s platform stability on the horizontal plane is observed. The initial condition is set as
, and simulation result is shown in
Figure 6, from which it can be seen that the vehicle possesses suitable self-stability. Obviously, this kind of stability is caused by the fact that the vehicle’s gravity center is designed to be lower than the buoyancy center.
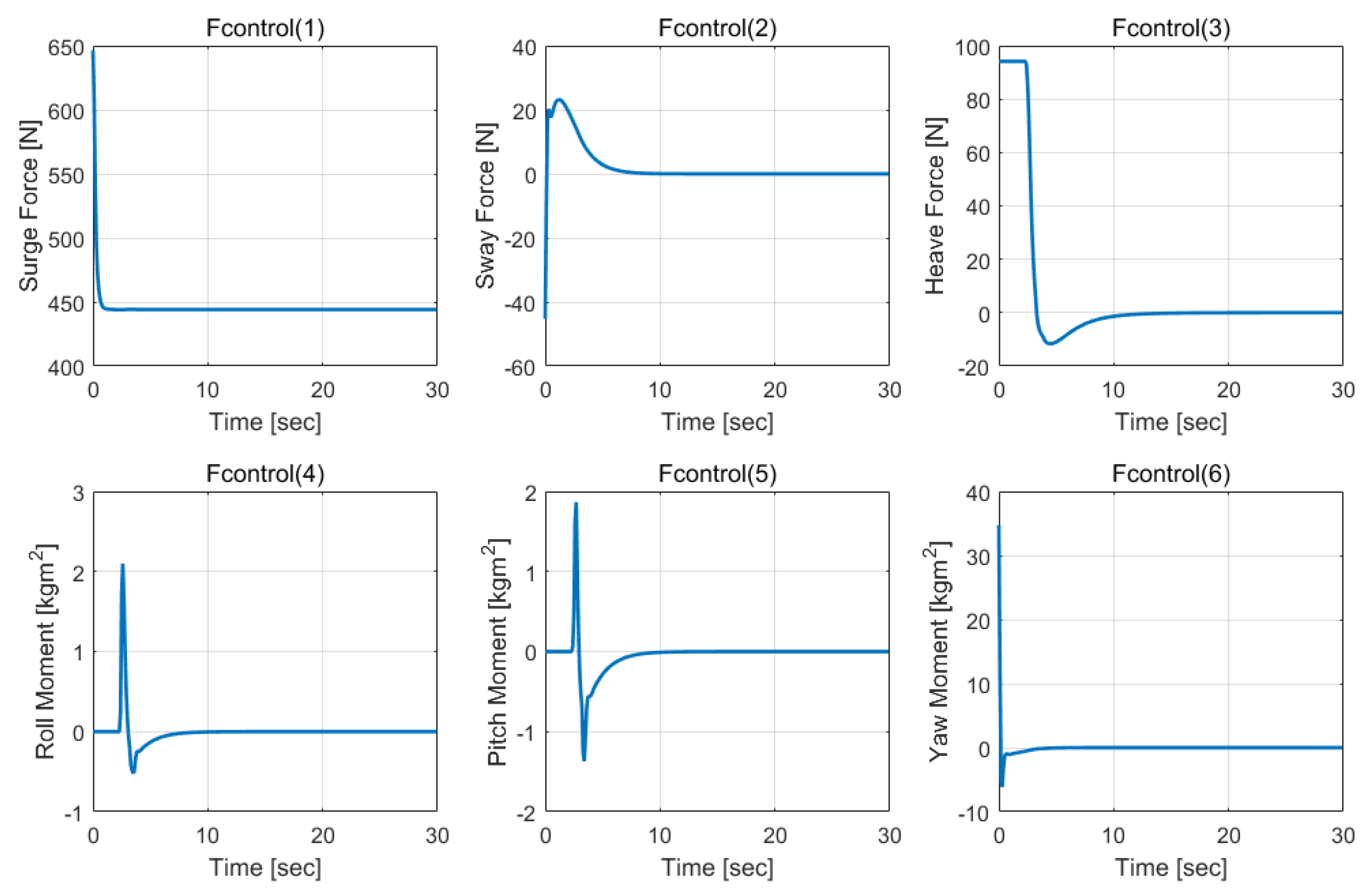
Then, it carries out the maximum forward speed simulation combined with the horizon and heading keeping tests. In the simulation, control gains are set as
, and other parameters are taken as
, and sampling time is
.
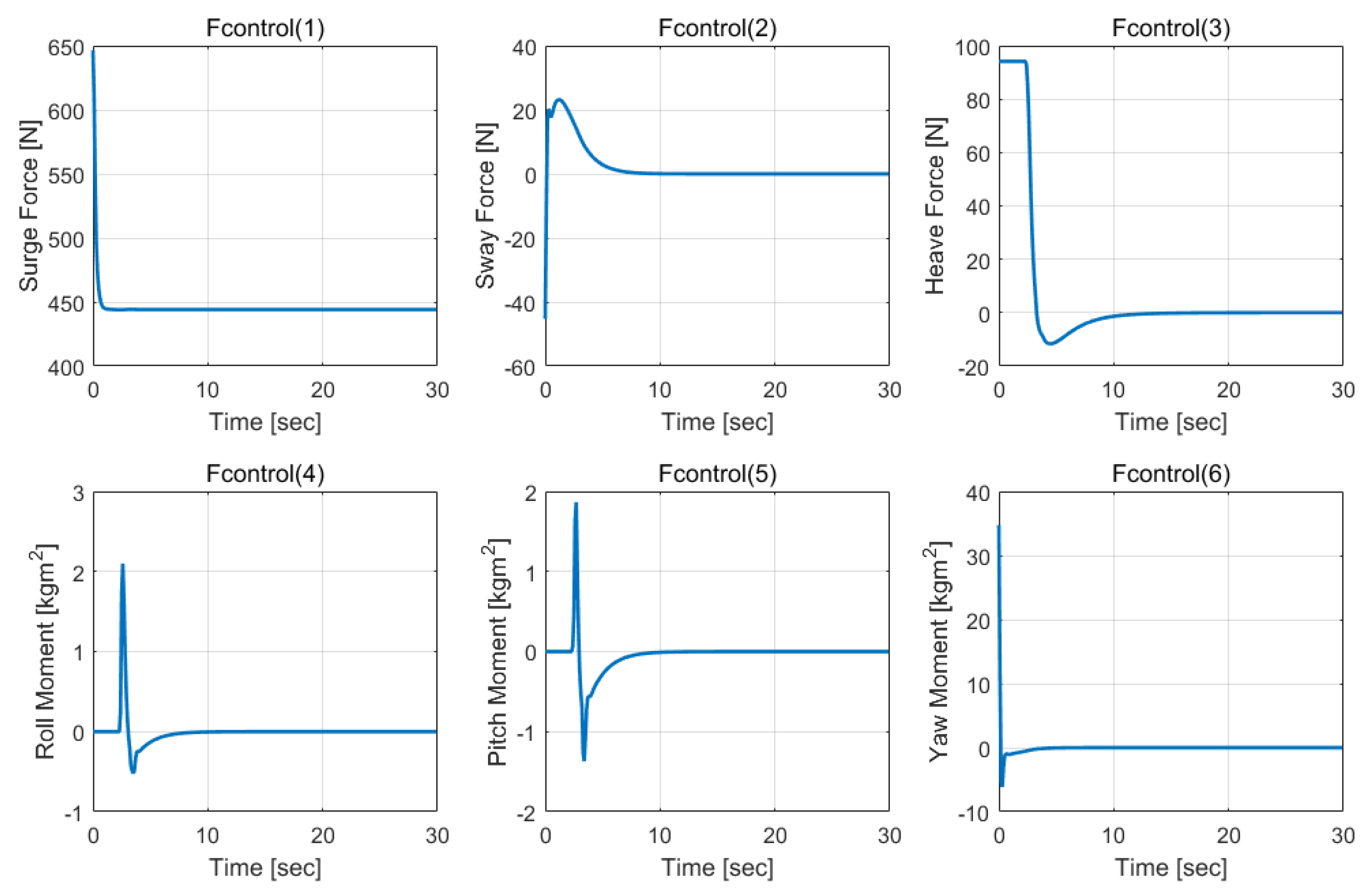
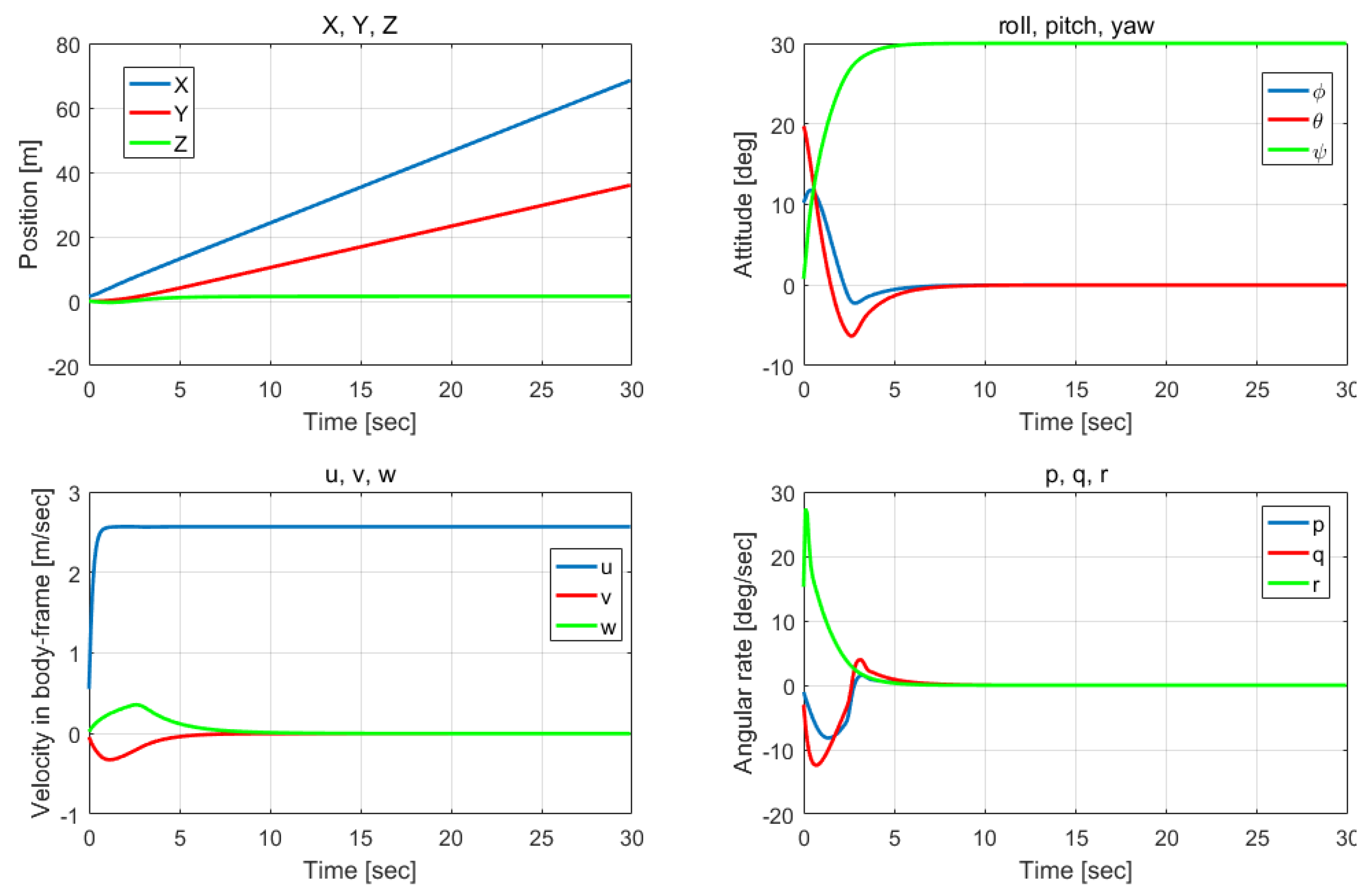
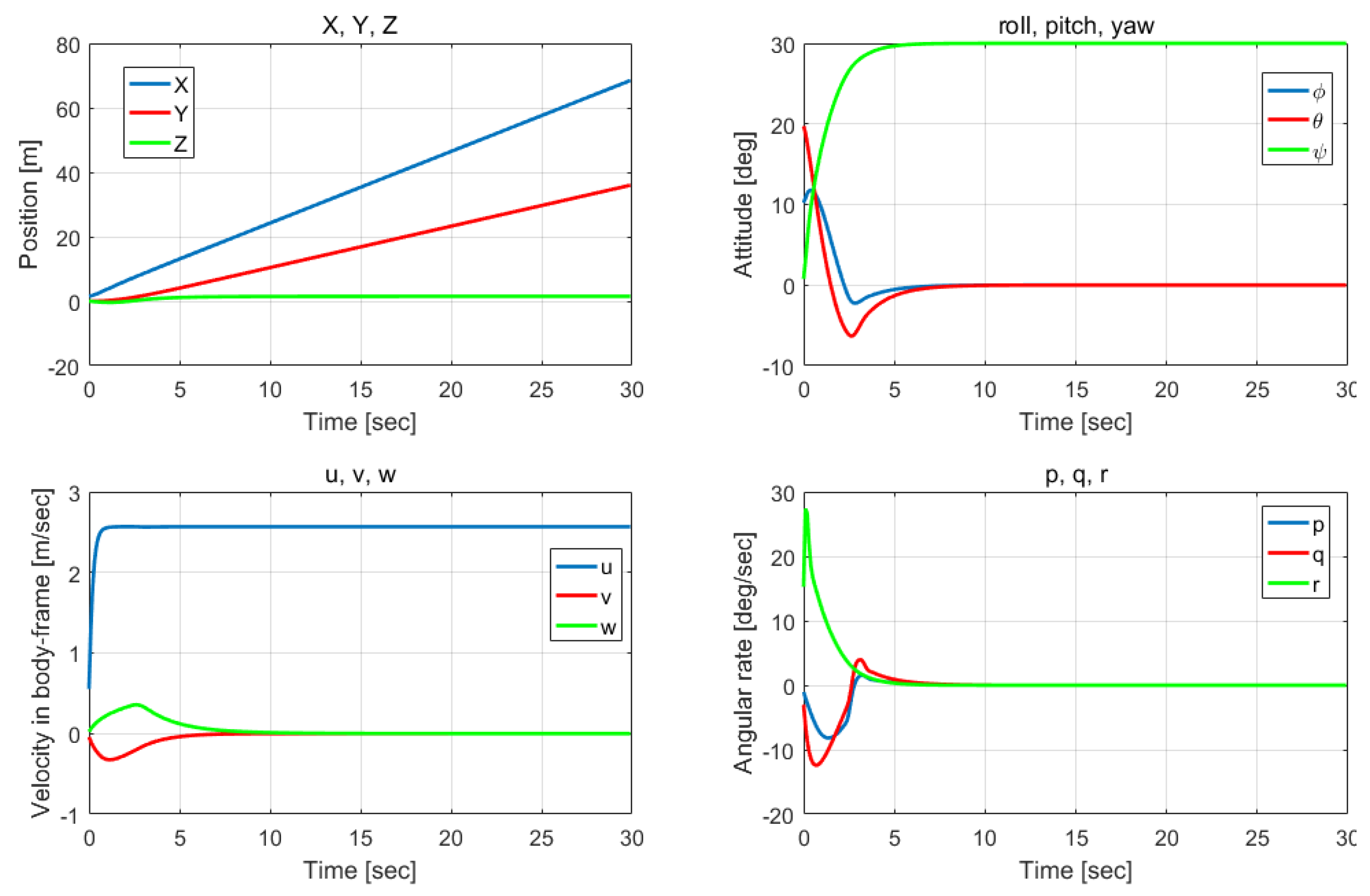
Figure 7 shows the control force
calculated using (38), and
Figure 8 presents the corresponding vehicle motion information. From
Figure 8, it can be seen that the vehicle’s maximum forward speed is about 2.56 m/s. This speed is lower than 3.2 m/s which is the simulation result in [
28] where the effect of the relationship between the maximum thrust force and the fluid speed flow through the thruster was not considered. However, 2.56 m/s is still larger than the experimental result of 2.1 m/s, and this will be further discussed in the next section.
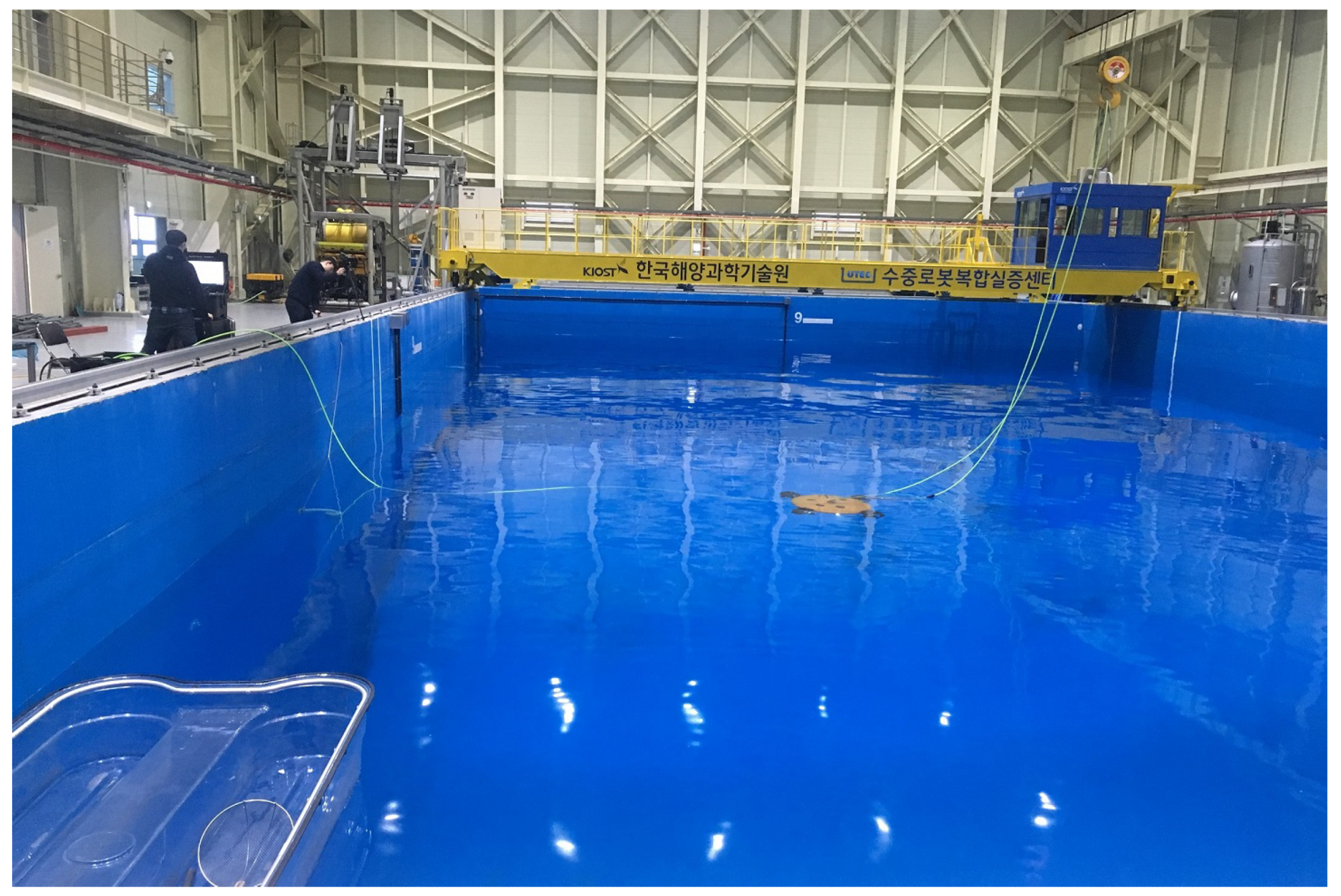
6. Experimental Studies
Experimental tests are carried out in the water tank and circulating water channel both in the Underwater Construction Robotics R&D Center (UCRC) in the Korea Institute of Ocean Science and Technology (KIOST) [
29].
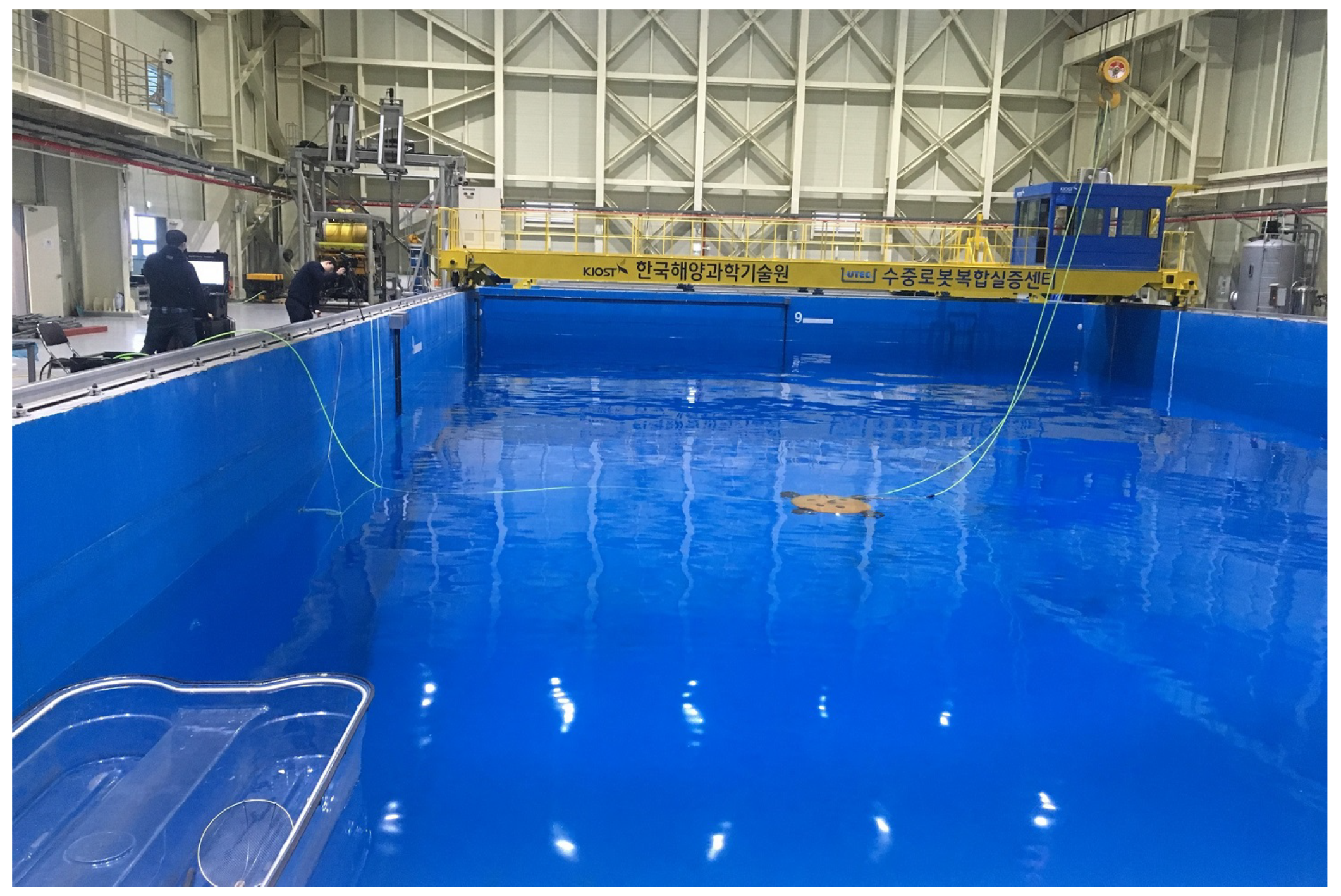
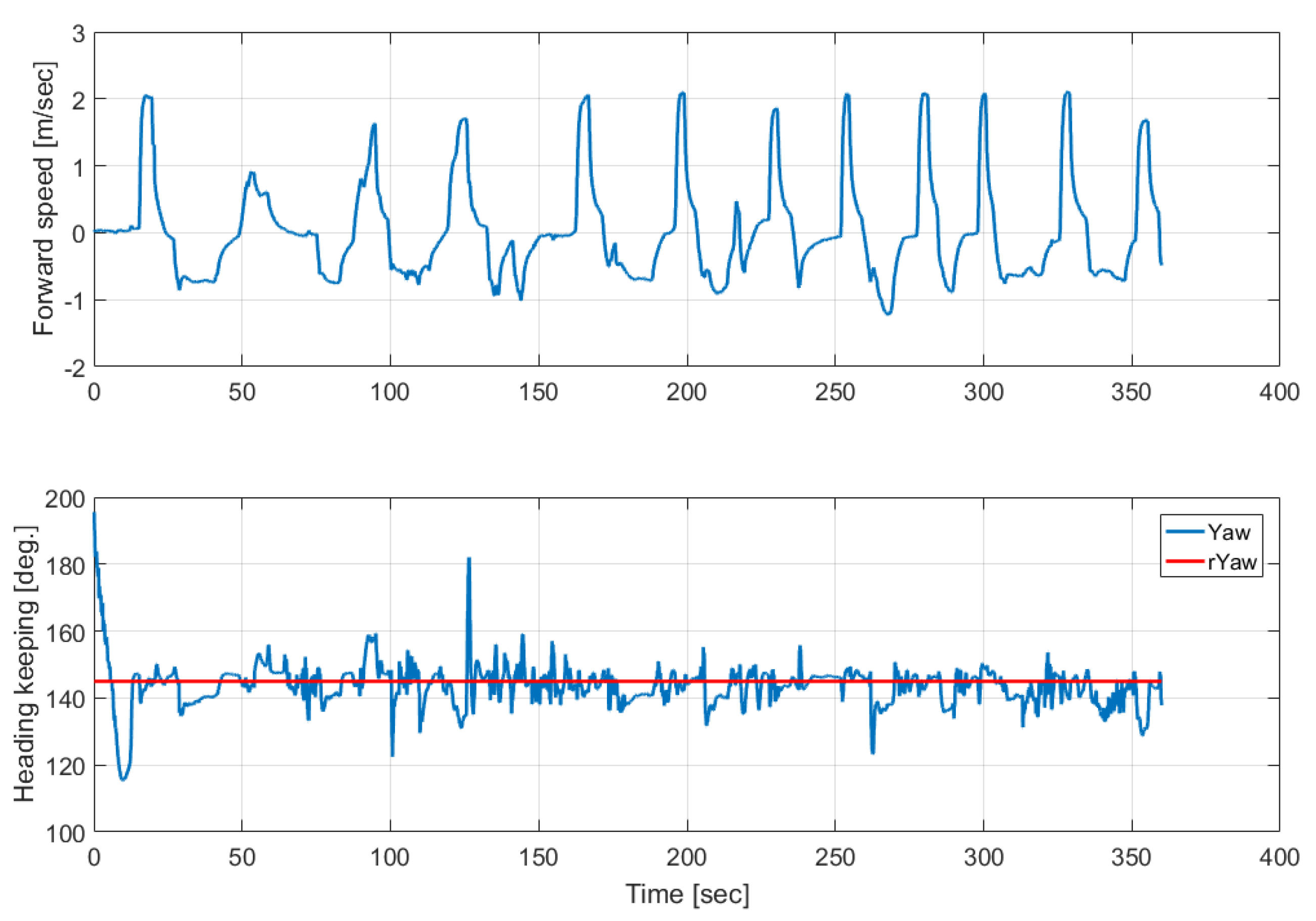
Figure 9 shows the engineering basin where the maximum forward speed test is taken. The experimental result is shown in
Figure 10, from which it can be seen that the vehicle’s maximum forward speed is about 2.1 m/s. This speed is lower than the simulation result of 2.56 m/s. This might be caused by several reasons. One is that there are quite a number of coupled and complicated hydrodynamic terms that are not included in the vehicle’s model in the simulation. The second is that the drag component caused by the tether cable is not considered in the simulation. Indeed, this drag term might be significant in the case of the small size of underwater vehicles. From this point of view, whether the vehicle can be operated in AUV mode might be an important issue for the vehicle to overcome strong current.
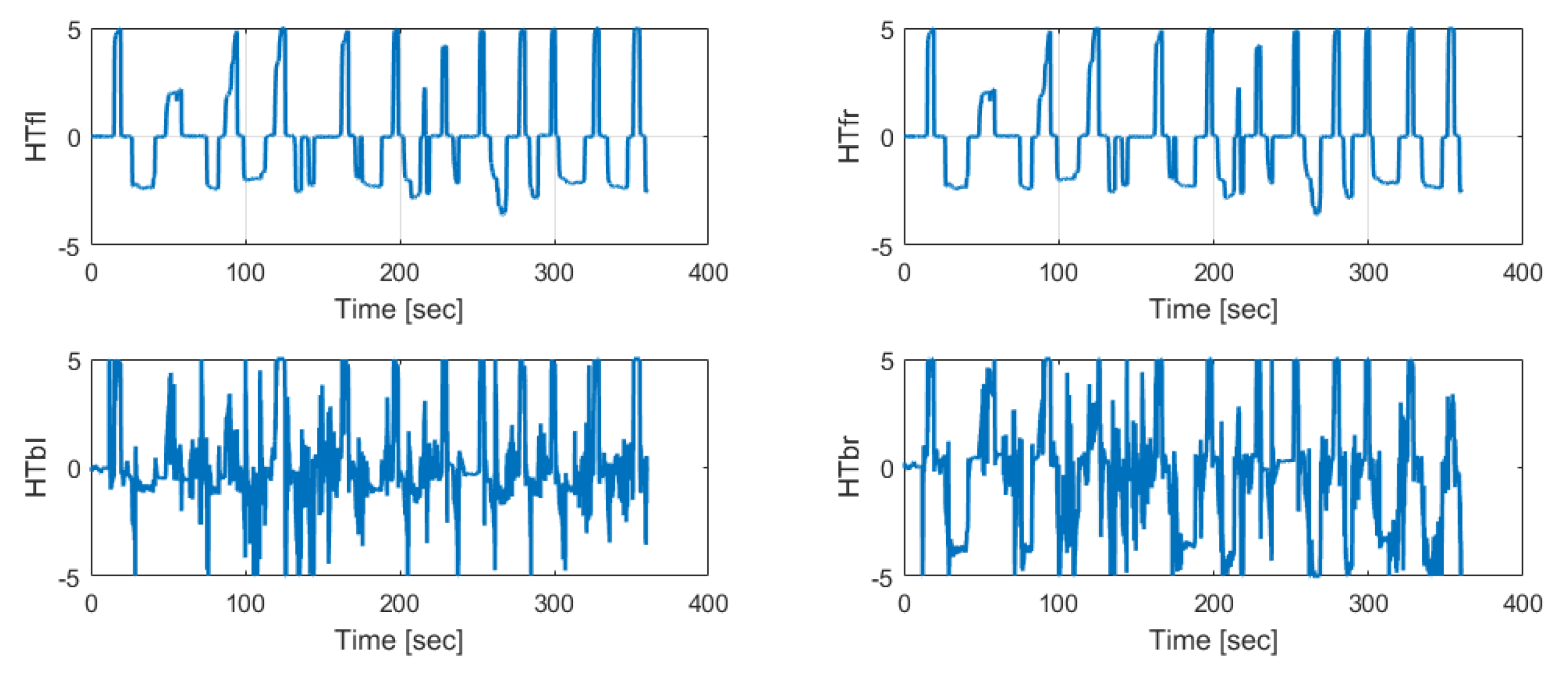
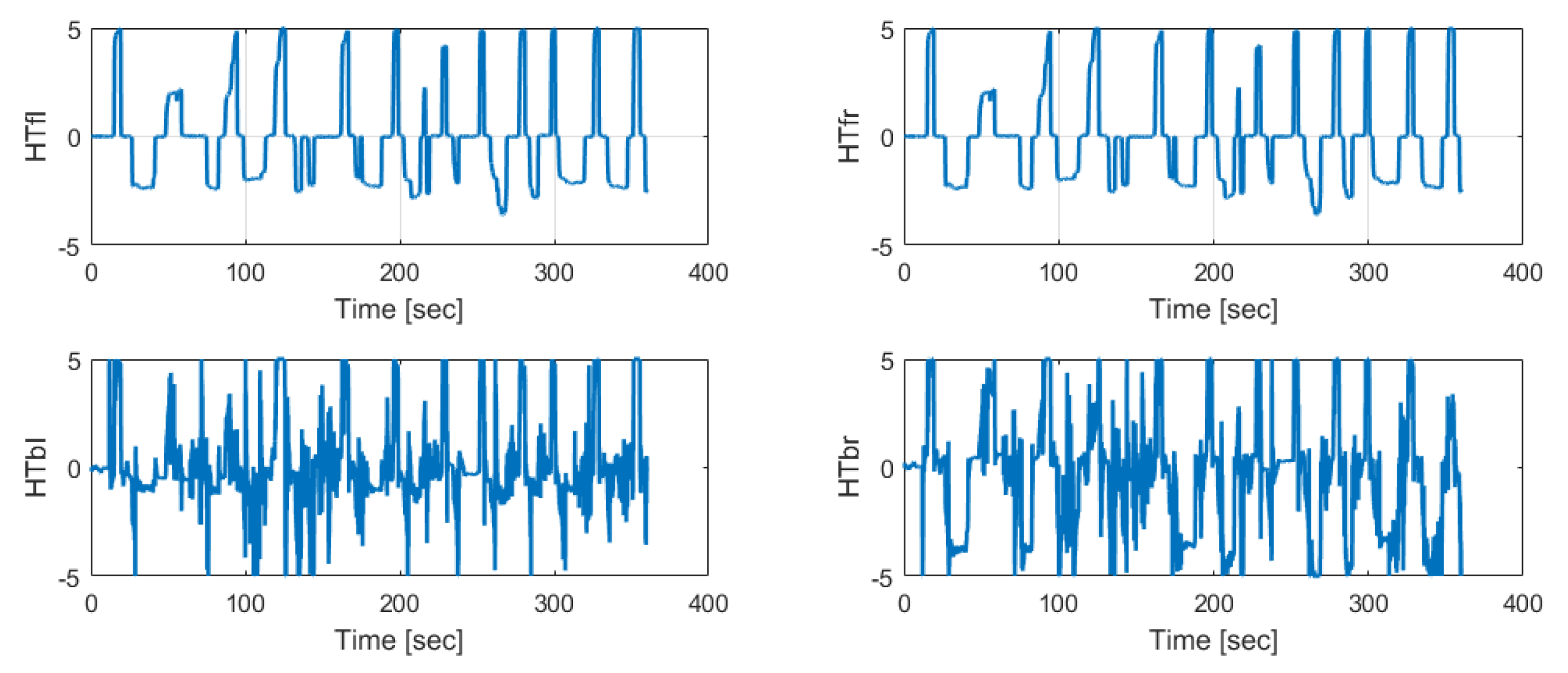
Figure 11 shows the control inputs for four of horizontal thrusters in this maximum forward speed test.
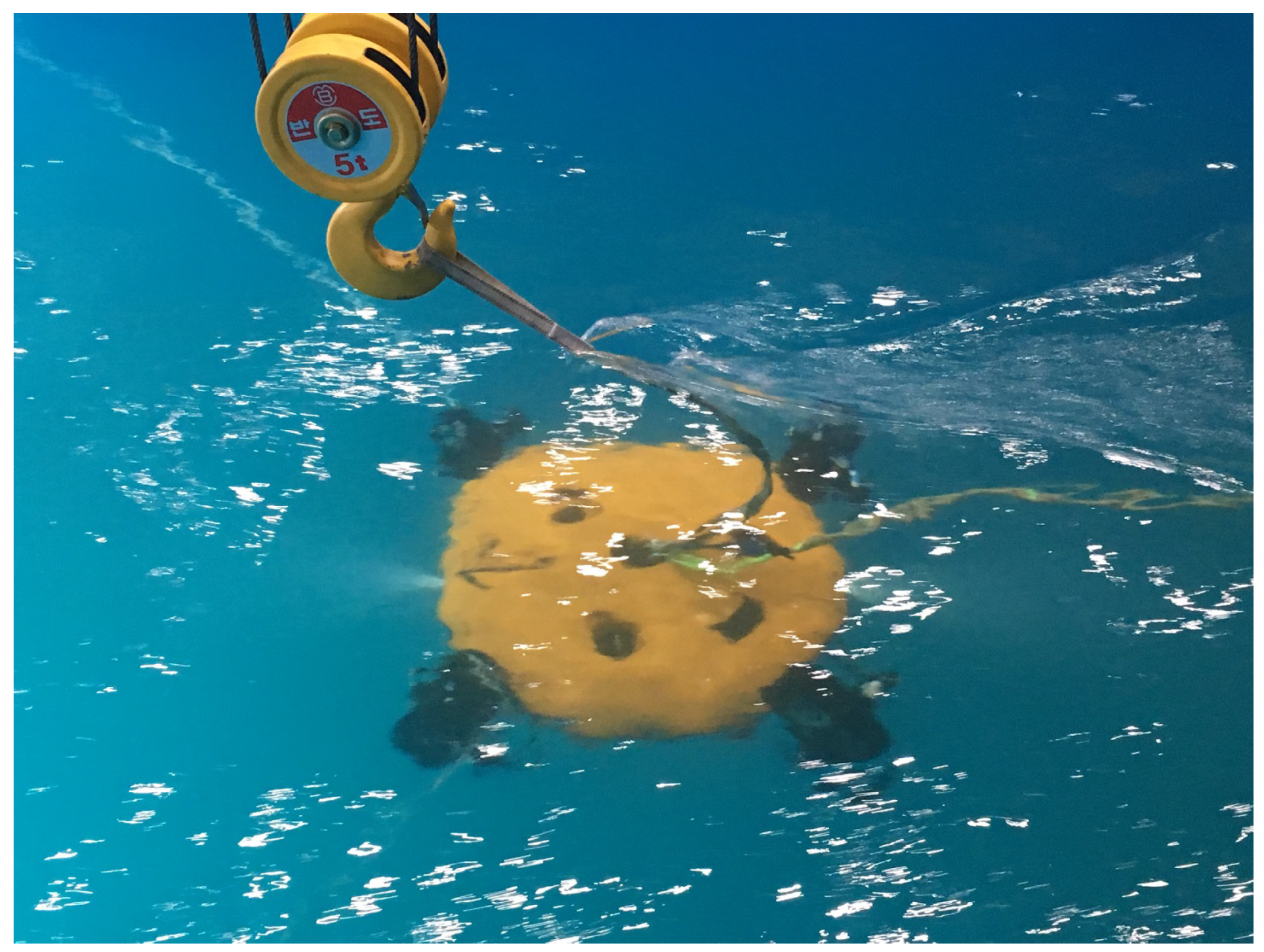
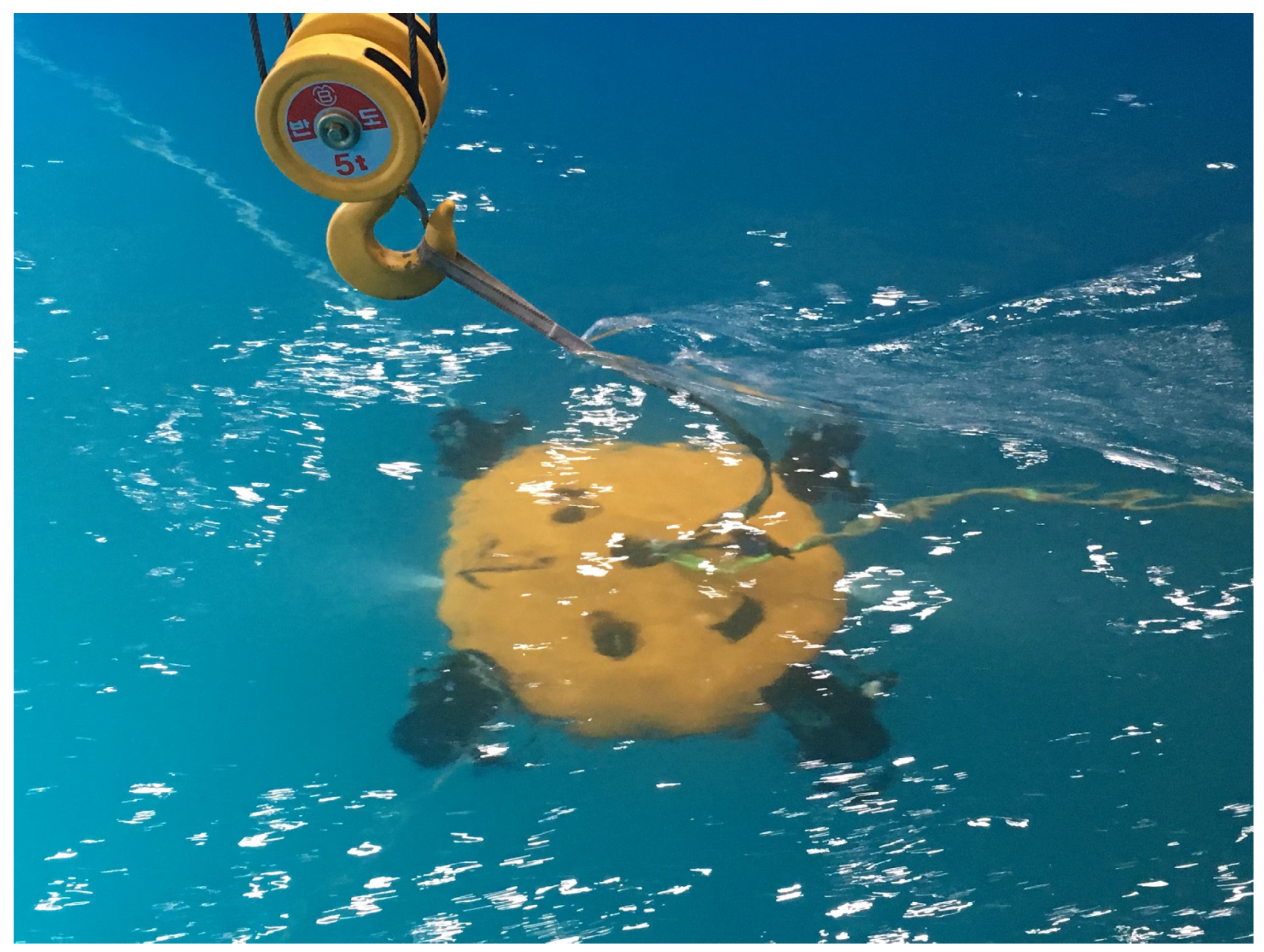
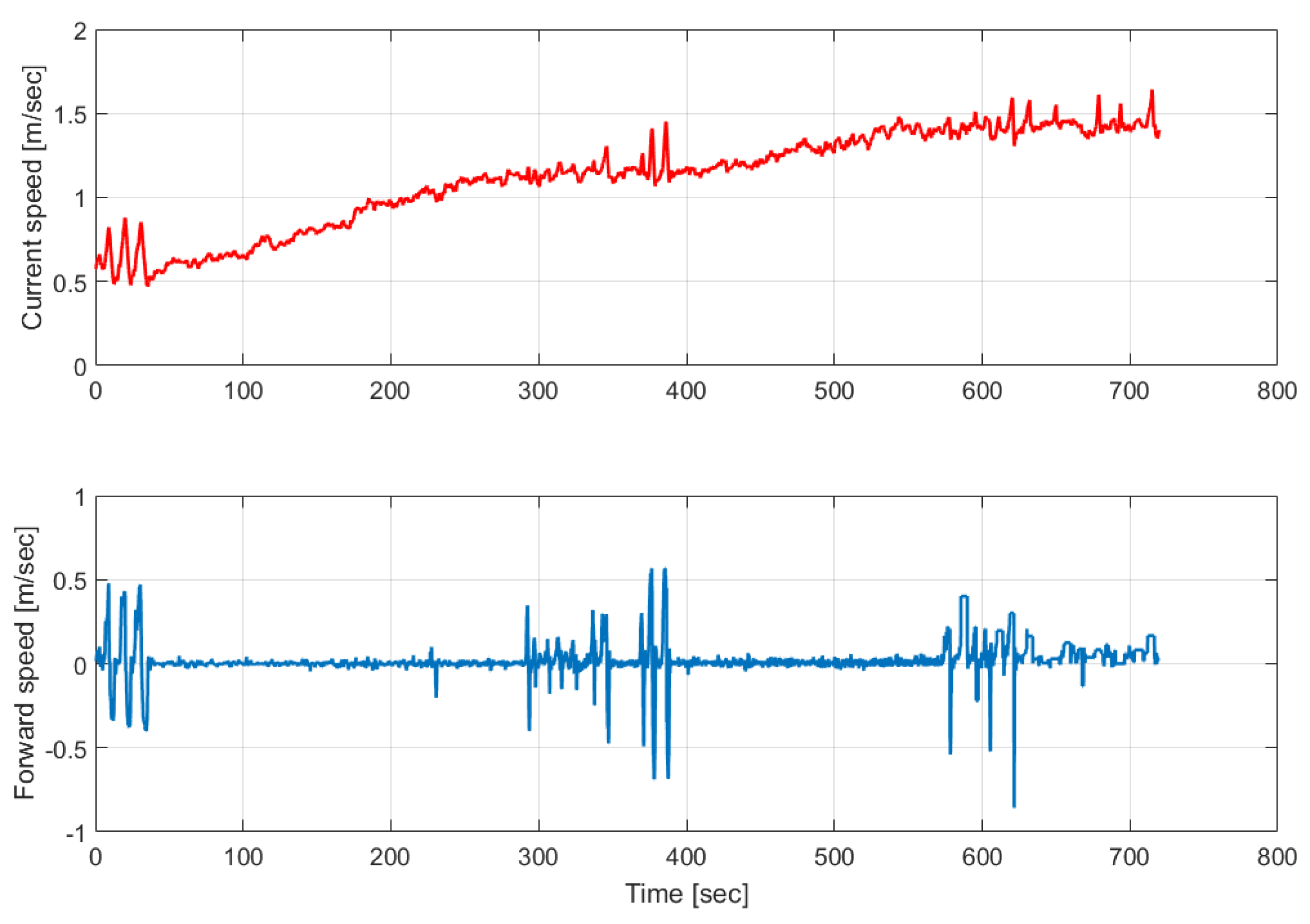
In addition, the test is taken where the vehicle is installed in the circulating water channel as in
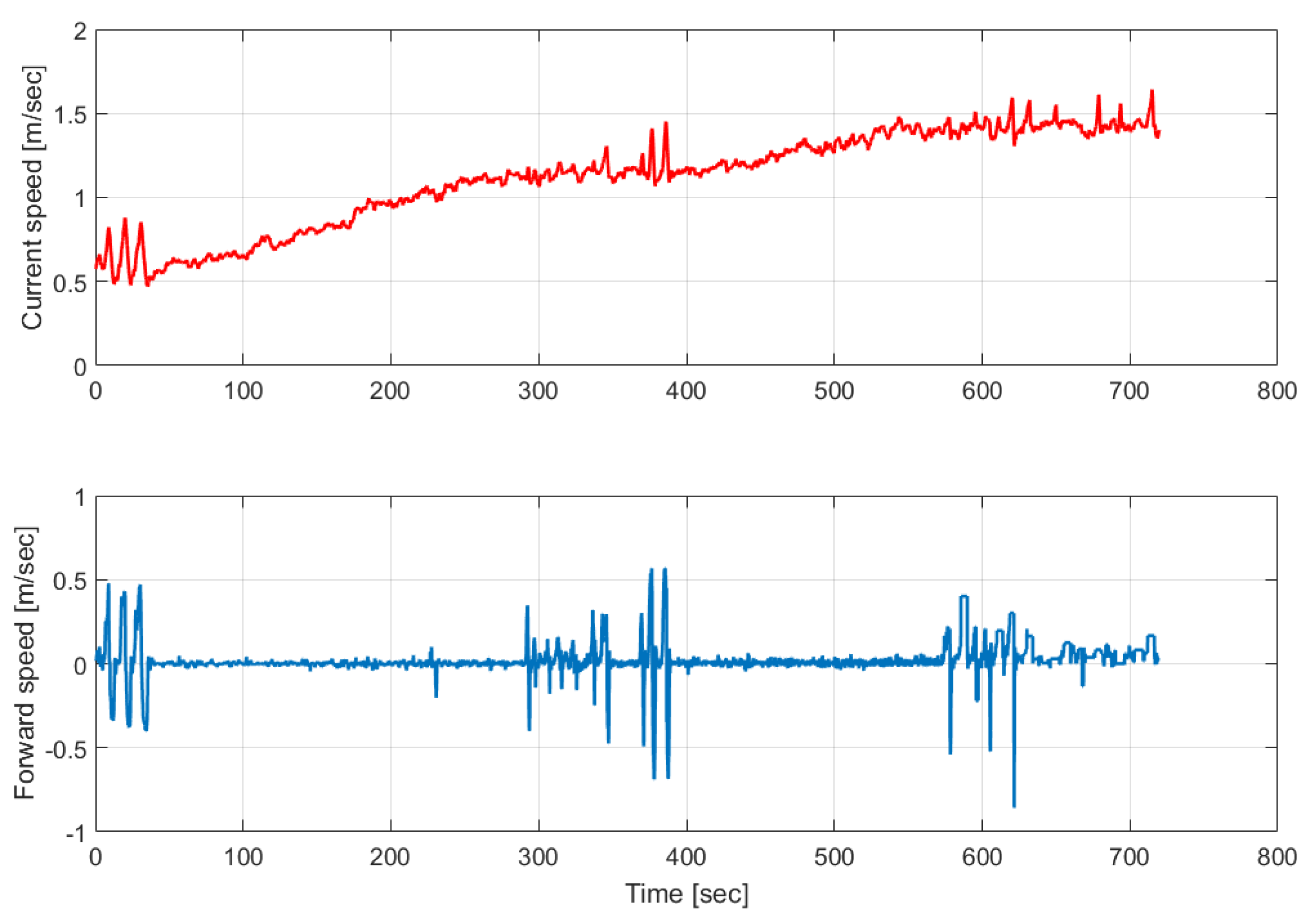
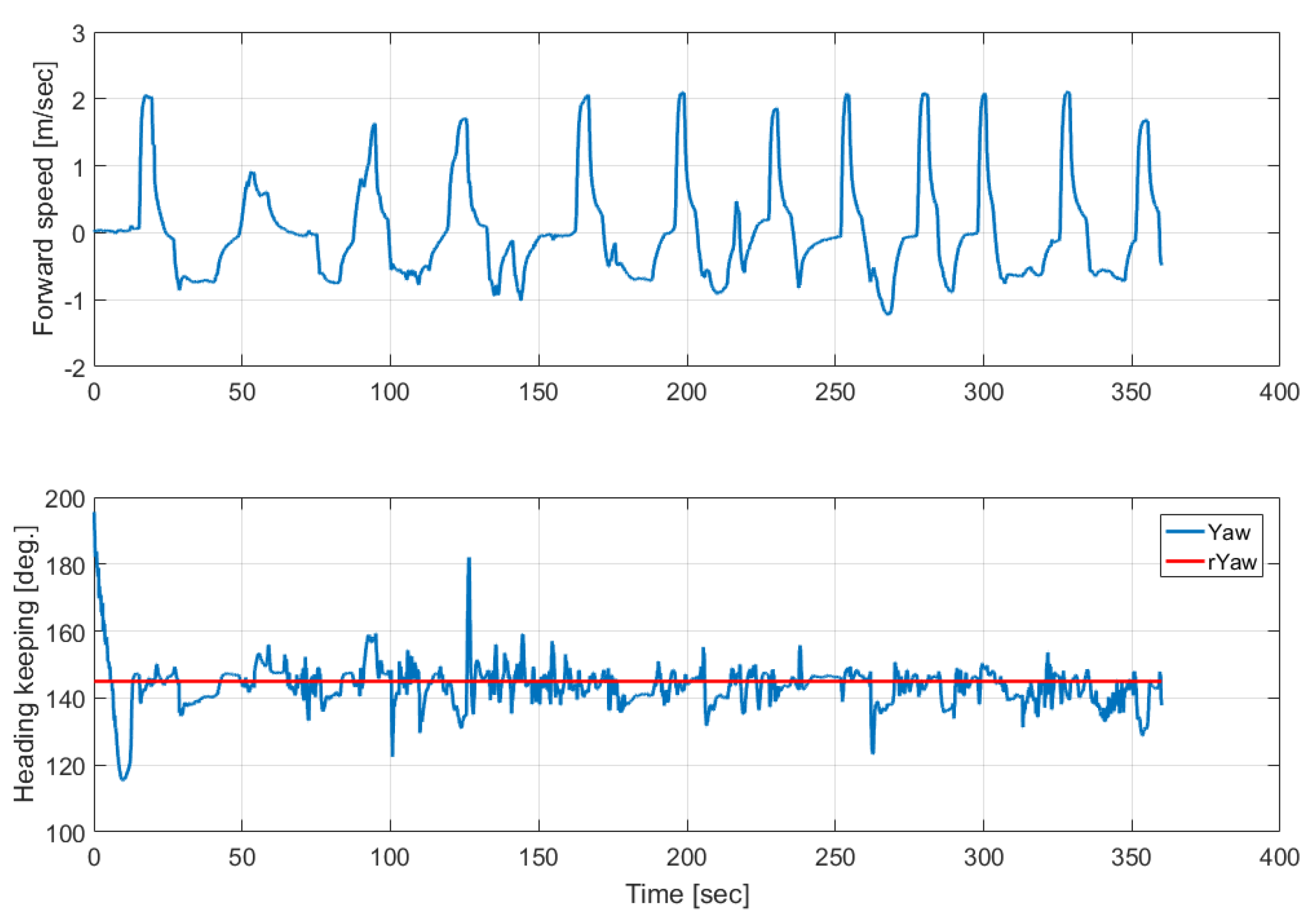
Figure 12, and it investigates if the vehicle can take the forward speed motion while keeping its heading in the strong current environment. In the test, the current speed is adjusted from 1.0 knots to 2.0 knots and further up to 2.5 knots. From the experimental result shown in
Figure 13, it can be concluded that the vehicle can take forward motion even in the case where the current increased up to 2.5 knots.
7. Conclusions
This paper has presented the development of a UUV platform and its control method to overcome strong current. The vehicle has been designed to have a flattened ellipsoidal exterior to minimize the hydrodynamic damping. In addition, vectored thrust force control algorithm has been developed to maximize its horizontal speed. All of these technologies have been evaluated through both simulation and experimental tests. Especially, through the experimental studies carried out in the water tank and circulating water channel, it is found that, for the current version of vehicle platform, more strong roll and pitch moments might be needed to guarantee the vehicle’s horizontal stabilization.
During the next step of research works, the current version of the platform will be upgraded to have four vertical thrusters mounted symmetrically and each of the thrusters, similar to the horizontal thrusters, has the same forward and reverse dynamics. Moreover, each thruster will be more powerful compared to the current version and mounted more farther away from the center point. All of these are supposed to significantly increase the vehicle’s capability of stabilizing horizontal motion in the strong current environment.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}