Development of an Image Processing Module for Autonomous Underwater Vehicles through Integration of Visual Recognition with Stereoscopic Image Reconstruction


Abstract
1. Introduction
2. Architecture of the Proposed AUV Module
2.1. Image Processing Module
2.2. Design of AUV Control System
2.3. Establishment of the Rigid Body System
3. Image Processing
3.1. Point, Line, and Edge Detection
3.2. Hough Transform
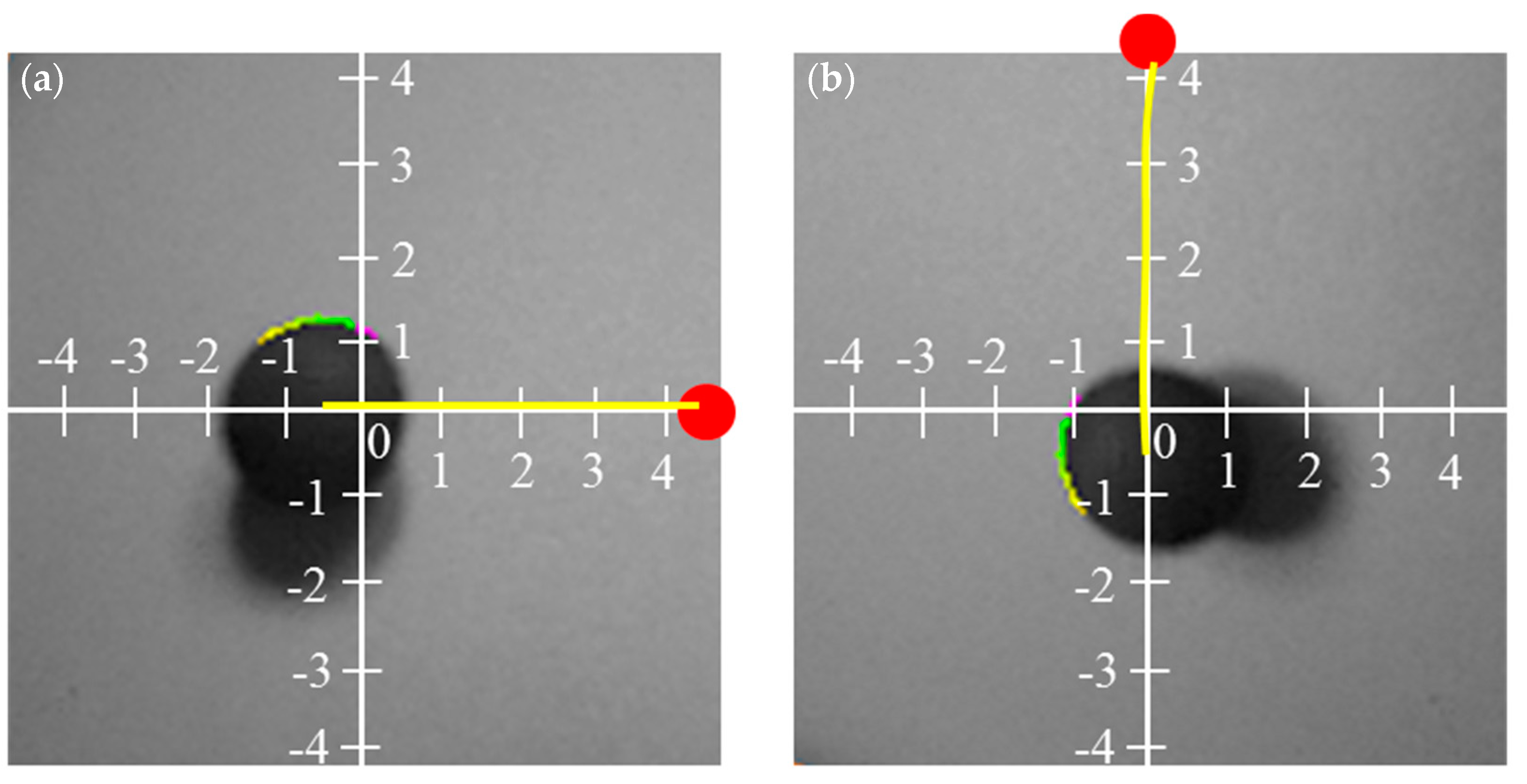
3.3. Optical Flow
4. Image Matching for Stereoscopic Vision
4.1. Stereo Vision Theory
4.2. Feature Matching of Images
4.3. Histogram Equalization
5. Results and Discussion
5.1. Laboratory Equipment and Instruments
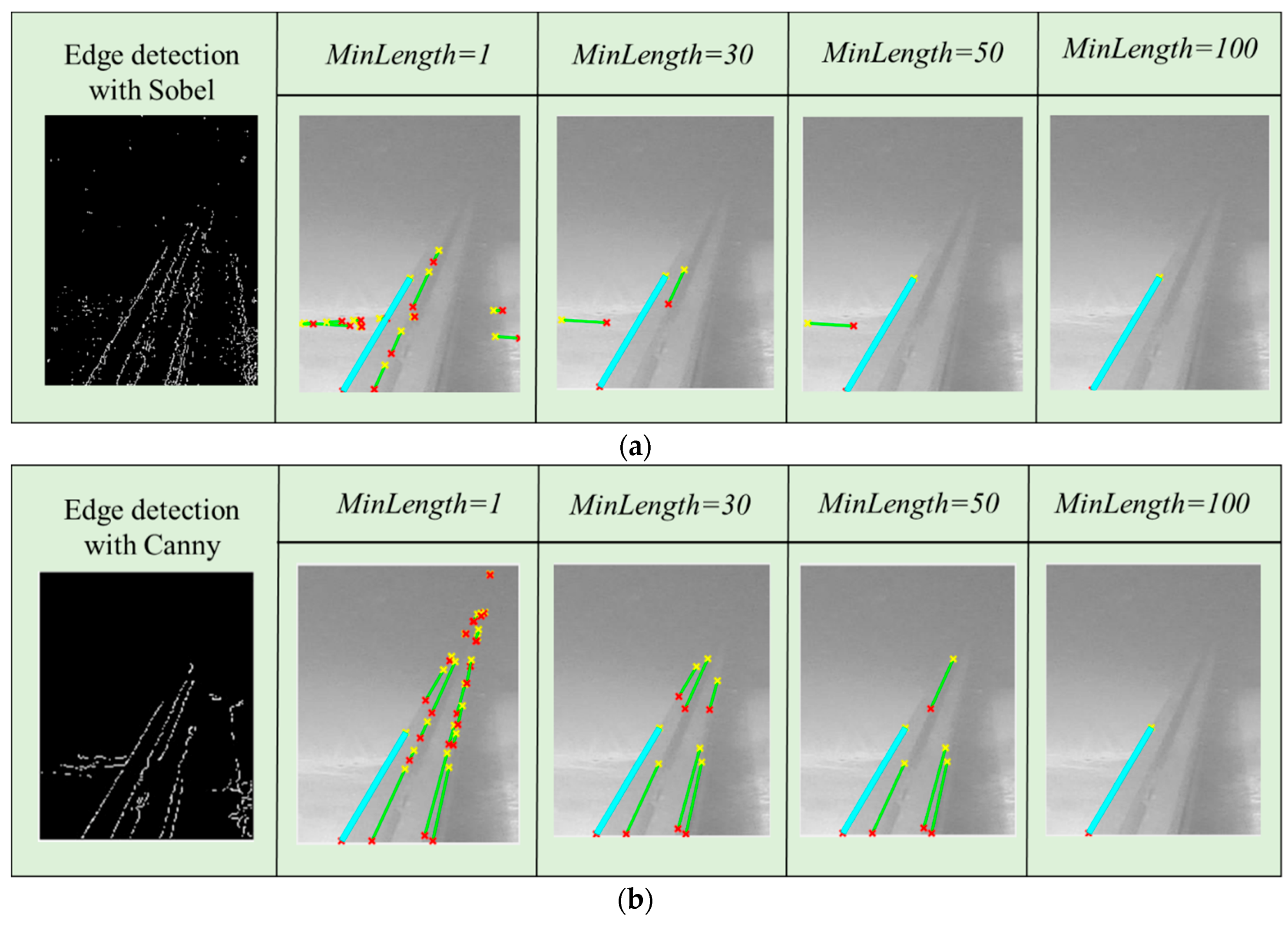
5.2. Hough Transform
5.3. Assessment of Stereoscopic Vision
5.3.1. Harris Corner Detector
5.3.2. Distance Measurement
5.3.3. Comparison of Results after Increasing the Contrast
5.3.4. Computation of Error Rate at Different Distances
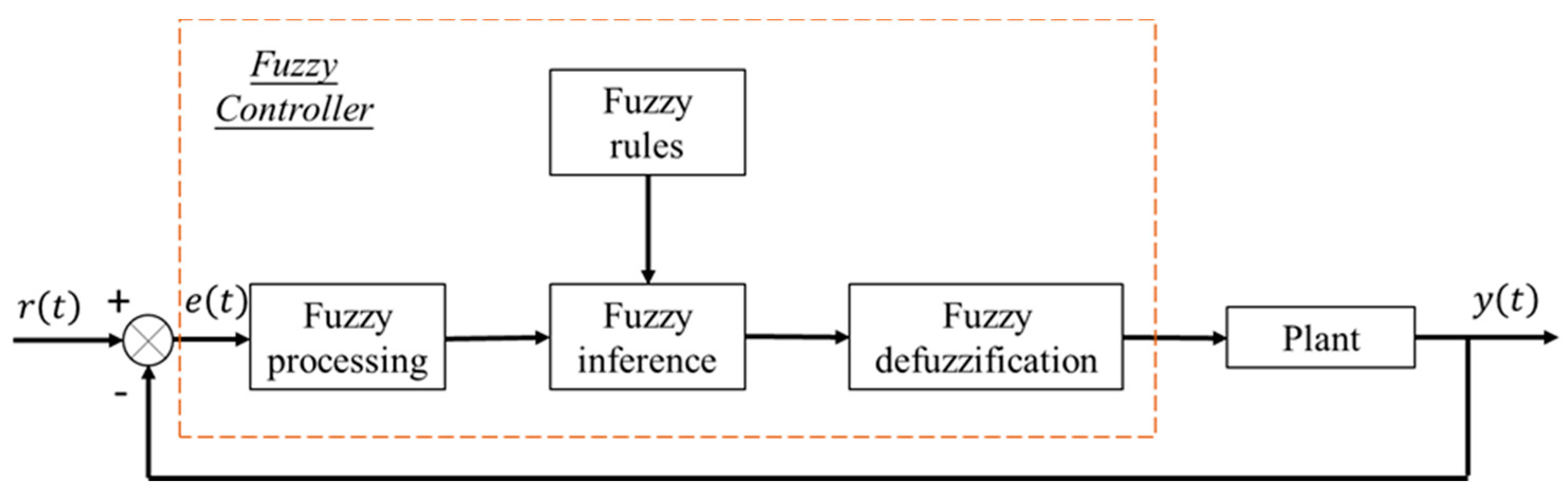
5.4. Integration of Image with Fuzzy Control System
6. Conclusions
- A simulation environment was established for the controlled object (i.e., the steering gear and propeller), and a fuzzy control system was designed particularly for the proposed AUV. With image input, the rotation angle, angular velocity of the rudder plane, and propeller revolution speed can be controlled. In addition, design of the fuzzy attribution function and definition of fuzzy rules can be amended instantly from the simulation interface to reduce system instability and operational uncertainties.
- A Hough transform based on Canny detection was applied to line detection of underwater objects, and the difference in the detection results in the out-of-water and underwater environments was compared. The obtained results indicated that the Hough transform in this study produced notable detection results in both conditions. The adjustment of built-in parameters allowed users to precisely identify the linear features of the object.
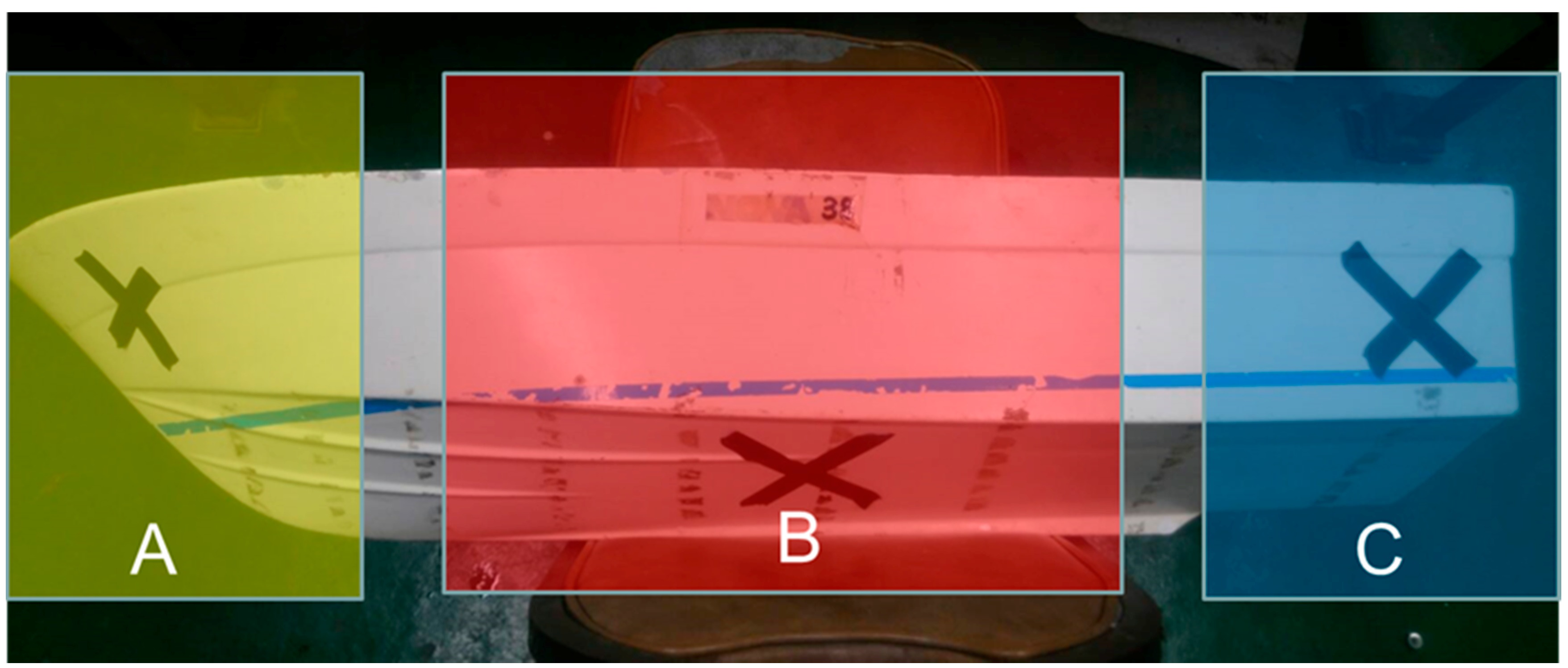
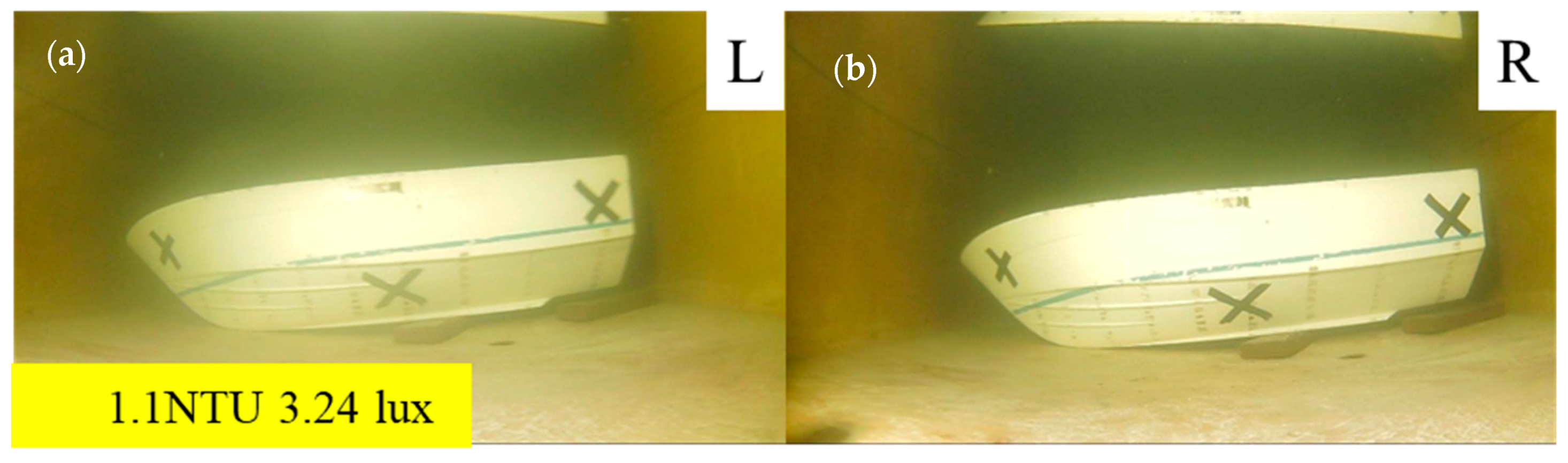
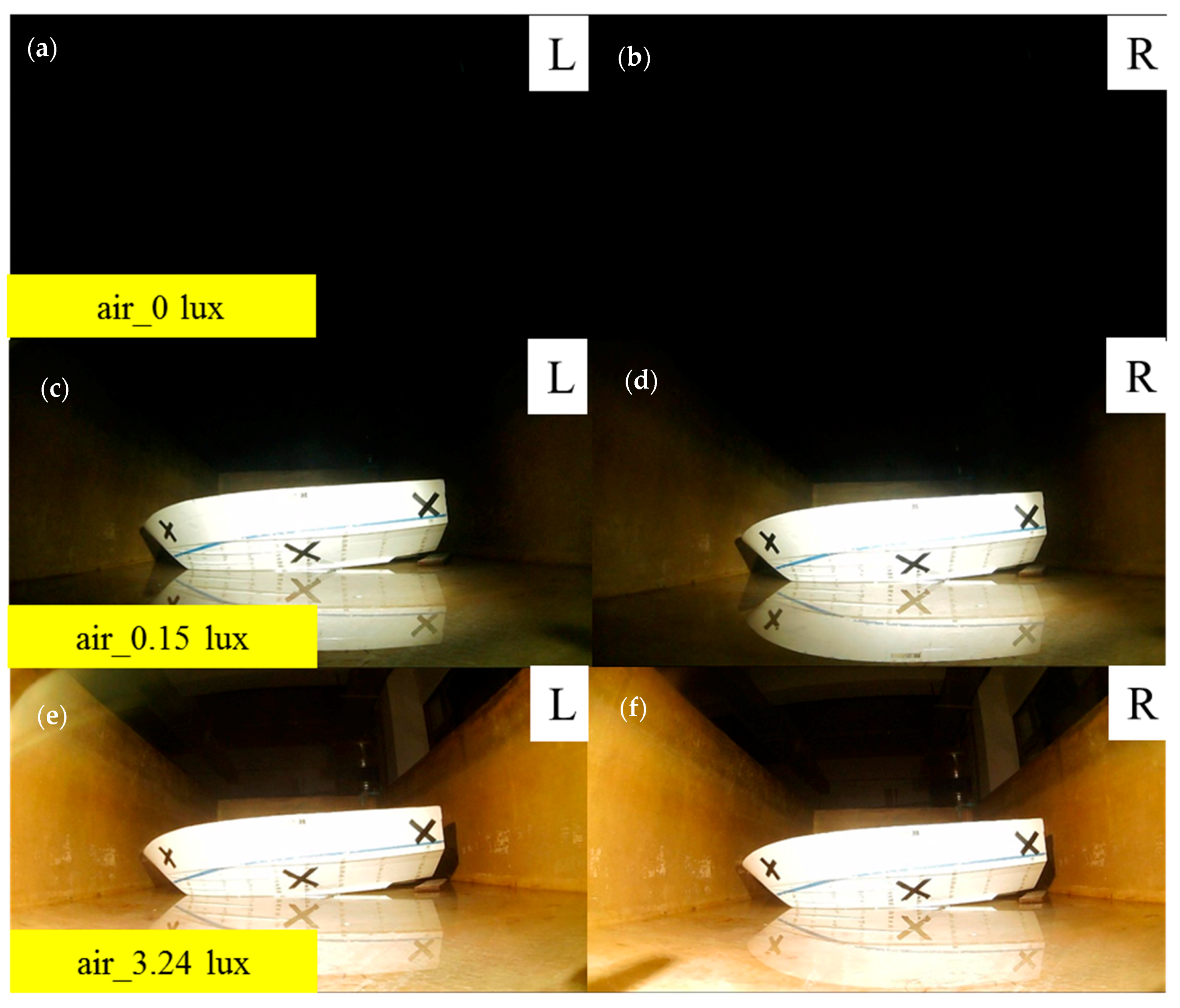
- In terms of distance measurement through stereoscopic vision, it is indicated that graphical features appear distorted unless the contrast is increased in the underwater environment with turbidity. The high contrast ratio results in a substantial increase in the improvement rate, reaching a maximum of 96%, indicating that this image processing method can indeed deliver superior measurement results.
- In future study, the image processing module combined with the fuzzy controller would be applied to the inspection of underwater structures or object tracking of moving objects.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Bruno, F.; Bianco, G.; Muzzupappa, M.; Barone, S.; Razionale, A. Experimentation of structured light and stereo vision for underwater 3D reconstruction. ISPRS J. Photogramm. Remote Sens. 2011, 66, 508–518. [Google Scholar] [CrossRef]
- Sáez, J.M.; Escolano, F. Entropy minimization SLAM using stereo vision. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation (ICRA), Barcelona, Spain, 18–22 April 2005; pp. 36–43. [Google Scholar]
- Lin, Y.-H.; Shou, K.-P.; Huang, L.-J. The initial study of LLS-based binocular stereo-vision system on underwater 3D image reconstruction in the laboratory. J. Mar. Sci. Technol. 2017, 22, 513–532. [Google Scholar] [CrossRef]
- Cho, Y.; Kim, A. Channel invariant online visibility enhancement for visual SLAM in a turbid environment. J. Field Robot. 2018, 35, 1080–1100. [Google Scholar] [CrossRef]
- Suresh, S.; Westman, E.; Kaess, M. Through-Water Stereo SLAM With Refraction Correction for AUV Localization. IEEE Robot. Autom. Lett. 2019, 4, 692–699. [Google Scholar] [CrossRef]
- Teixeira, P.V.; Hover, F.S.; Leonard, J.J.; Kaess, M. Multibeam Data Processing for Underwater Mapping. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 1877–1884. [Google Scholar]
- Sáez, J.M.; Hogue, A.; Escolano, F.; Jenkin, M. Underwater 3D SLAM through entropy minimization. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation (ICRA), Orlando, FL, USA, 15–19 May 2006; pp. 3562–3567. [Google Scholar]
- Sun, B.; Zhu, D.Q.; Yang, S.X. An Optimized Fuzzy Control Algorithm for Three-Dimensional AUV Path Planning. Int. J. Fuzzy Syst. 2018, 20, 597–610. [Google Scholar] [CrossRef]
- Yu, C.Y.; Xiang, X.B.; Lapierre, L.; Zhang, Q. Nonlinear guidance and fuzzy control for three-dimensional path following of an underactuated autonomous underwater vehicle. Ocean Eng. 2017, 146, 457–467. [Google Scholar] [CrossRef]
- Lin, Y.H.; Wang, S.M.; Huang, L.C.; Fang, M.C. Applying the stereo-vision detection technique to the development of underwater inspection task with PSO-based dynamic routing algorithm for autonomous underwater vehicles. Ocean Eng. 2017, 139, 127–139. [Google Scholar] [CrossRef]
- Kularatne, D.; Bhattacharya, S.; Hsieh, M.A. Optimal path planning in time-varying flows using adaptive discretization. IEEE Robot. Autom. Lett. 2018, 3, 458–465. [Google Scholar] [CrossRef]
- Hermand, E.; Nguyen, T.W.; Hosseinzadeh, M.; Garone, E. Constrained Control of UAVs in Geofencing Applications. In Proceedings of the 2018 26th Mediterranean Conference on Control and Automation (MED), Zadar, Croatia, 19–22 June 2018; pp. 217–222. [Google Scholar]
- Yao, P.; Zhao, S. Three-Dimensional Path Planning for AUV Based on Interfered Fluid Dynamical System Under Ocean Current (June 2018). IEEE Access 2018, 6, 42904–42916. [Google Scholar] [CrossRef]
- Foresti, G.L.; Gentili, S.; Zampato, M. Autonomous underwater vehicle guidance by integrating neural networks and geometric reasoning. Int. J. Imaging Syst. Technol. 1999, 10, 385–396. [Google Scholar] [CrossRef]
- Park, J.-Y.; Jun, B.-h.; Lee, P.-m.; Oh, J. Experiments on vision guided docking of an autonomous underwater vehicle using one camera. Ocean Eng. 2009, 36, 48–61. [Google Scholar] [CrossRef]
- Wettergreen, D.; Gaskett, C.; Zelinsky, A. Development of a visually-guided autonomous underwater vehicle. In Proceedings of the OCEANS’98 Conference Proceedings, Nice, France, 28 September–1 October 1998; pp. 1200–1204. [Google Scholar]
- Zhang, T.D.; Wan, L.; Zeng, W.J.; Xu, Y.R. Object detection and tracking method of AUV based on acoustic vision. China Ocean Eng. 2012, 26, 623–636. [Google Scholar] [CrossRef]
- Armstrong, B.; Wolbrecht, E.; Edwards, D. AUV navigation in the presence of a magnetic disturbance with an extended Kalman filter. In Proceedings of the OCEANS 2010 IEEE-Sydney, Sydney, NSW, Australia, 24–27 May 2010; pp. 1–6. [Google Scholar]
- Balasuriya, B.; Takai, M.; Lam, W.; Ura, T.; Kuroda, Y. Vision based autonomous underwater vehicle navigation: underwater cable tracking. In Proceedings of the OCEANS’97. MTS/IEEE Conference Proceedings, Halifax, NS, Canada, 6–9 October 1997; pp. 1418–1424. [Google Scholar]
- Rizzini, D.L.; Kallasi, F.; Aleotti, J.; Oleari, F.; Caselli, S. Integration of a stereo vision system into an autonomous underwater vehicle for pipe manipulation tasks. Comput. Electr. Eng. 2017, 58, 560–571. [Google Scholar] [CrossRef]
- Balasuriya, A.; Ura, T. Vision-based underwater cable detection and following using AUVs. In Proceedings of the OCEANS’02 MTS/IEEE, Biloxi, MI, USA, 29–31 October 2002; pp. 1582–1587. [Google Scholar]
- Negahdaripour, S.; Xu, X.; Jin, L. Direct estimation of motion from sea floor images for automatic station-keeping of submersible platforms. IEEE J. Ocean. Eng. 1999, 24, 370–382. [Google Scholar] [CrossRef]
- Ballard, D.H. Generalizing the Hough transform to detect arbitrary shapes. In Readings in Computer Vision; Elsevier: Amsterdam, The Netherlands, 1987; pp. 714–725. [Google Scholar]
- Prestero, T.T.J. Verification of a Six-Degree of Freedom Simulation Model for the REMUS Autonomous Underwater Vehicle; Massachusetts Institute of Technology: Cambridge, UK, 2001. [Google Scholar]
- Litwiller, D. Ccd vs. cmos. Photonics Spectra 2001, 35, 154–158. [Google Scholar]
- Yamakawa, T. Electronic circuits dedicated to fuzzy logic controller. Sci. Iran. 2011, 18, 528–538. [Google Scholar] [CrossRef]
- Hu, B.; Tian, H.; Qian, J.; Xie, G.; Mo, L.; Zhang, S. A fuzzy-PID method to improve the depth control of AUV. In Proceedings of the 2013 IEEE International Conference on Mechatronics and Automation (ICMA), Takamatsu, Japan, 4–7 August 2013; pp. 1528–1533. [Google Scholar]
- Stelzer, R.; Proll, T.; John, R.I. Fuzzy logic control system for autonomous sailboats. In Proceedings of the 2007 IEEE International Fuzzy Systems Conference, London, UK, 23–26 July 2007; pp. 1–6. [Google Scholar]
- Weber, S. A general concept of fuzzy connectives, negations and implications based on t-norms and t-conorms. Fuzzy Set Syst. 1983, 11, 115–134. [Google Scholar] [CrossRef]
- Dony, R.; Wesolkowski, S. Edge detection on color images using RGB vector angles. In Proceedings of the 1999 IEEE Canadian Conference on Electrical and Computer Engineering, Edmonton, AB, Canada, 9–12 May 1999; pp. 687–692. [Google Scholar]
- Gao, W.; Yang, L.; Zhang, X.; Zhou, B.; Ma, C. Based on soft-threshold wavelet de-noising combining with Prewitt operator edge detection algorithm. In Proceedings of the 2010 2nd International Conference on Education Technology and Computer (ICETC), Shanghai, China, 22–24 June 2010; pp. V5-155–V5-162. [Google Scholar]
- Kanopoulos, N.; Vasanthavada, N.; Baker, R.L. Design of an image edge detection filter using the Sobel operator. IEEE J. Solid-State Circuits 1988, 23, 358–367. [Google Scholar] [CrossRef]
- Illingworth, J.; Kittler, J. A survey of the Hough transform. Comput. Vis. Graph. Image Process. 1988, 44, 87–116. [Google Scholar] [CrossRef]
- Kiryati, N.; Eldar, Y.; Bruckstein, A.M. A probabilistic Hough transform. Pattern Recognit. 1991, 24, 303–316. [Google Scholar] [CrossRef]
- Horn, B.K.; Schunck, B.G. Determining optical flow. Artif. Intell. 1981, 17, 185–203. [Google Scholar] [CrossRef]
- Bouguet, J.-Y. Camera Calibration Toolbox for Matlab. MRL-Intel Corp. Available online: http://www.vision.caltech.edu/bouguetj/calib_doc/ (accessed on 18 April 2019).
- Zhang, Z.Y. A flexible new technique for camera calibration. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 1330–1334. [Google Scholar] [CrossRef]
- Li, J.P.; Yang, Z.W.; Huo, H.; Fang, T. Camera calibration method with checkerboard pattern under complicated illumination. J. Electron. Imaging 2018, 27, 043038. [Google Scholar] [CrossRef]
- Bradski, G.; Kaehler, A. Learning OpenCV: Computer Vision with the OpenCV Library; O’Reilly Media, Inc.: Sebastopol, CA, USA, 2008. [Google Scholar]



































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Torpedo Type |
|---|---|
| Diameter | 17 cm |
| Total length | 180 cm |
| Weight (in the air) | 35 kg |
| Max. operating depth (ideal) | 200 m |
| Power source | Lithium Battery |
| Max. velocity (ideal) | 5 Knot |
| Endurance | 12 h at 2.5 knot |
| Propeller type | Four-blade propeller |
| Rudders control | Four independent servo control interfaces |
| Communication | High precision INS |
| Camera | 3D Dual Lens Camera HD Wind-angle Camera |
| Processing | Inter ATOM SoC process E3845 |
| HDD | 64 GB SSD HD |
| SD card | 32 GB |
| Model | ELP-1MP2CAM001-HOV90 |
|---|---|
| Sensor | OV9712 |
| Lens Size | 1/4 inch |
| Pixel Size | 3.0 × 3.0 µm |
| Image Area | 3888 × 2430 µm |
| Max. Resolution | 1280 (H) × 720 (V) |
| Compression Format | MJPEG/YUV2 |
| Resolution and Frame | 1280 × 20 MJPEG@ 30fps YUY2@ 10fps 640 × 360MJPEG@ 60fps YUY2@ 30fps |
| S/N Ratio | 40 dB |
| Dynamic Range | 69 dB |
| Sensitivity | 3.7 V/lux-sec@ 550 nm |
| Mini Illumination | 0.1 lux |
| Shutter Type | Electronic rolling shutter/frame exposure |
| Connecting Port type | USB2.0 High Speed |
| Free Drive Protocol | USB Video Class (UVC) |
| Adjustable Parameters | Brightness, Contrast, Saturation, Hue, Sharpness, Gamma, Gain, White balance, Backlight Contrast, Exposure |
| Lens Parameter | HOV 90° |
| Power Supply | USB BUS POWER Micro USB |
| Power Supply | DC 5 V |
| Operating Voltage | 130 mA~180 mA |
| Working Temperature | −20 °C~85 °C |
| Cable | Standard 1 m |
| Operating System Request | Win XP/Vista/Win 7/Win 8 Linux with UVC (above linux-2.6.26) MAC-OS X 10.4.8 or later Android 4.0 or above with UVC |
| Model | 14023MP-M12 |
|---|---|
| Sensor | 9P006 |
| Lens Size | 1/4 inch |
| Max. Resolution | 2560 (H) × 1920 (V) |
| Compression Format | MJPEG |
| Connecting Port Type | USB 2.0 High Speed |
| Viewing Angle | 180°/360° |
| Connectivity | IP/Network Wired |
| Power Supply | DC 12 V |
| Power Consumption | 12 V/2 A |
| Mini Illumination | 0.5 lux |
| Operating System Request | Win XP/Vista/Win 7/Win 8 |
| Vertical Rudder Plane | Rudder Rate | |||
|---|---|---|---|---|
| Left | Neutral | Right | ||
| Rudder Angle | Strong Left | Left | Strong Left | Strong Left |
| Left | Keep | Left | Strong Left | |
| Middle | Right | Keep | Left | |
| Right | Strong Right | Right | Keep | |
| Strong Right | Strong Right | Strong Right | Right | |
| Horizontal Rudder Plane | Plane Angle Rate | |||
|---|---|---|---|---|
| Left | Neutral | Right | ||
| Plane Angle | Strong Up | Left | Strong Left | Strong Left |
| Up | Keep | Left | Strong Left | |
| Middle | Right | Keep | Left | |
| Down | Strong Right | Right | Keep | |
| Strong Down | Strong Right | Strong Right | Right | |
| Length | 20 m |
|---|---|
| Coax 75 ohm | 1 each |
| Conductor | 5/0.25 mm2 |
| Shielded twisted Quad | 7/0.2 mm2 |
| Outer jacket | Polyurethane |
| Diameter | 11 ± 0.30 mm |
| Min. breaking strength | 500 kg |
| Pressure Testing | 200 bar |
|---|---|
| Light Power Consumption | 200 Watt/Each |
| Housing | Hard Anodized 6061-T6 Aluminum Alloy |
| Camera Power Supply | DC 10 V–30 V |
| Subsea Waterproof Wet Connector | Bulk Head |
| Operating Temperature (Water) | 0~45 °C |
| Range | 0.001 Klux to 1.999 Klux 0.01 Klux to 19.99 Klux 0.1 Klux to 199.9 Klux |
|---|---|
| Resolution | 0.001 Klux 0.01 Klux 0.1 Klux |
| Accuracy | ±6% of reading ±2% digits |
| Calibration | Factory calibrated |
| Light Sensor | Human-eye-response silicon photodiode with 1.5 m coaxial cable |
| Range | 0.00 NTU to 9.99 NTU 10.0 NTU to 99.9 NTU 100 NTU to 1000 NTU |
|---|---|
| Resolution | 0.01 NTU from 0.00 NTU to 9.99 NTU 0.1 NTU from 10.0 NTU to 9.99 NTU 1 Klux from 100 NTU to 1000 NTU |
| Accuracy | ±2% of reading plus 0.02 NTU |
| Repeatability | ±1% of reading or 0.02 NTU |
| Stray Light | <0.02 NTU |
| Typical EMC Deviation | ±0.05 NTU |
| Light Source | Tungsten filament lamp |
| Method | Ratio Nephelometric signal scatter light ratio transmitted light Adaptation of the USEPA Method 108.1 and Standard Method 2130B |
| Parameter | Left Image | Right Image |
|---|---|---|
| Number of detected corners | 7508 | 7685 |
| Proportion to the total pixels | 0.8% | 0.8% |
| Number of selected corners | 200 | 200 |
| Parameter | Left Image | Right Image |
|---|---|---|
| Number of detected corners | 8717 | 8710 |
| Proportion to the total pixels | 0.9% | 0.9% |
| Number of selected corners | 200 | 200 |
| Case Type | Region | Original Distance (m) | Measured Distance (m) | Error Rate (%) |
|---|---|---|---|---|
| Case1_0.15 lux | A | 1.10 | 0.80 | 27.70 |
| B | 1.01 | 0.90 | 10.89 | |
| C | 1.00 | 1.30 | 30.00 | |
| Case1_3.24 lux | A | 1.10 | 1.00 | 9.09 |
| B | 1.01 | 0.95 | 5.94 | |
| C | 1.00 | 1.30 | 30.00 | |
| Case2_0.15 lux | A | 1.10 | - | - |
| B | 1.01 | - | - | |
| C | 1.00 | - | - | |
| Case2_3.24 lux | A | 1.10 | 0.90 | 18.80 |
| B | 1.01 | 1.00 | 0.99 | |
| C | 1.00 | 0.80 | 20.00 |
| Case | Region | Original Distance (m) | Obtained Distance (m) | Error Rate (%) |
|---|---|---|---|---|
| Case1_0.15 lux | A | 1.10 | 1.00 | 9.09 |
| B | 1.01 | 1.00 | 0.99 | |
| C | 1.00 | 0.99 | 1.00 | |
| Case1_3.24 lux | A | 1.10 | 1.00 | 9.09 |
| B | 1.01 | 0.96 | 4.95 | |
| C | 1.00 | 0.95 | 5.00 | |
| Case2_0.15 lux | A | 1.10 | - | - |
| B | 1.01 | 1.01 | 0.99 | |
| C | 1.00 | - | - | |
| Case2_3.24 lux | A | 1.10 | 1.09 | 0.90 |
| B | 1.01 | 1.00 | 0.99 | |
| C | 1.00 | 0.92 | 8.00 |
| Case | Region | Original Error Rate (%) | Error Rate after Increasing Contrast (%) | Improvement Rate (%) |
|---|---|---|---|---|
| Case1_0.15 lux | A | 27.70 | 9.09 | 67.18 |
| B | 10.89 | 0.99 | 90.90 | |
| C | 30.00 | 1.00 | 96.66 | |
| Case1_3.24 lux | A | 9.09 | 9.09 | 0.00 |
| B | 5.94 | 4.95 | 16.60 | |
| C | −30.00 | 5.00 | 83.33 | |
| Case2_0.15 lux | A | - | - | - |
| B | - | 0.99 | - | |
| C | - | - | - | |
| Case2_3.24 lux | A | 18.80 | 0.90 | 95.21 |
| B | 0.99 | 0.99 | 0.00 | |
| C | 20.00 | 8.00 | 60.00 |
| Case | Time (s) | Distance (Pixel) | Speed (Pixel/s) |
|---|---|---|---|
| Case 1 | 5 | 155 | 31 |
| Case 2 | 10 | 155 | 15.5 |
| Case 3 | 50 | 155 | 3.1 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, Y.-H.; Chen, S.-Y.; Tsou, C.-H. Development of an Image Processing Module for Autonomous Underwater Vehicles through Integration of Visual Recognition with Stereoscopic Image Reconstruction. J. Mar. Sci. Eng. 2019, 7, 107. https://doi.org/10.3390/jmse7040107
Lin Y-H, Chen S-Y, Tsou C-H. Development of an Image Processing Module for Autonomous Underwater Vehicles through Integration of Visual Recognition with Stereoscopic Image Reconstruction. Journal of Marine Science and Engineering. 2019; 7(4):107. https://doi.org/10.3390/jmse7040107
Chicago/Turabian StyleLin, Yu-Hsien, Shao-Yu Chen, and Chia-Hung Tsou. 2019. "Development of an Image Processing Module for Autonomous Underwater Vehicles through Integration of Visual Recognition with Stereoscopic Image Reconstruction" Journal of Marine Science and Engineering 7, no. 4: 107. https://doi.org/10.3390/jmse7040107
APA StyleLin, Y.-H., Chen, S.-Y., & Tsou, C.-H. (2019). Development of an Image Processing Module for Autonomous Underwater Vehicles through Integration of Visual Recognition with Stereoscopic Image Reconstruction. Journal of Marine Science and Engineering, 7(4), 107. https://doi.org/10.3390/jmse7040107