1. Introduction
Hybrid underwater gliders (HUG) have received much attention from underwater technology communities for oceanographic and military applications. For autonomous operation, the control design plays an important role in underwater vehicle development. A novel adaptive dynamic sliding mode control algorithm was developed for an autonomous underwater vehicle (AUV) [
1]. This control system was found to be globally asymptotically stable based on Lyapunov theory, but no experimental verification was conducted. The nonlinearity of the rudder saturation was considered a disturbance when designing a sliding-mode-based adaptive control [
2]. Experimental results of this control algorithm were provided using cross-type rudders. A robust generalized dynamics inversion control algorithm was presented with a model of an AUV, and only a numerical simulation was conducted to demonstrate the robustness of the proposed control design [
3]. The upper bound on environmental disturbances was estimated using an adaptive tuning law in a novel adaptive second-order sliding mode control algorithm [
4]. A robust finite-time trajectory tracking control algorithm was proposed with only simulation results [
5]. Simulations and experimental results of an adaptive hybrid control algorithm were reported using the existing dynamical model of an underwater glider (Petrel-II 200, developed by Tianjin University) [
6]. Sliding mode tracking control for AUVs was proposed with a finite time disturbance observer, where asymptotic stability was ensured. However, only simulation results were reported, and this control algorithm was not experimentally verified [
7]. An adaptive heading control was proposed for an underwater wave glider [
8]. Model reference adaptive control (MRAC) and command governor adaptive control (CGAC) were compared in depth control experiments [
9]. Faramin, M. et al. developed an adaptive sliding mode control for separated surge motion, an observer-based model adaptive control was applied for heading motion, and simulation results were presented to show the efficiency of the proposed method [
10]. An adaptive chatter-free sliding mode control was proposed without the predefined bounds of external disturbances [
11]. As described above, a number of studies were performed on adaptive and robust control algorithms, and performance was verified only through computer simulations.
In this study, a new ray-type hybrid underwater glider (RHUG) modeling was completed through CFD analysis, and its parameters for heading control were adapted through experiments in a water tank and in the sea. For the RHUG, hydrodynamic coefficients in the vertical-plane dynamics were obtained using a CFD method for various pitch angles. Due to the difficulty of obtaining accurate parameter values of the heading dynamics, a robust adaptive control algorithm was designed containing an adaptation law for the unknown parameters and robust action for minimizing environmental disturbances. Simulations and experiments were conducted to verify the proposed control algorithm.
The paper is organized as follows. The vertical-plane and heading dynamics are presented in
Section 2. The stability of the proposed robust adaptive heading control is proved in
Section 3. The robustness of the proposed algorithm is demonstrated through simulations in
Section 4. Finally, the results of robust adaptive heading control in a water tank and at sea are presented in
Section 5. The conclusions are outlined in
Section 6.
2. RHUG Modeling
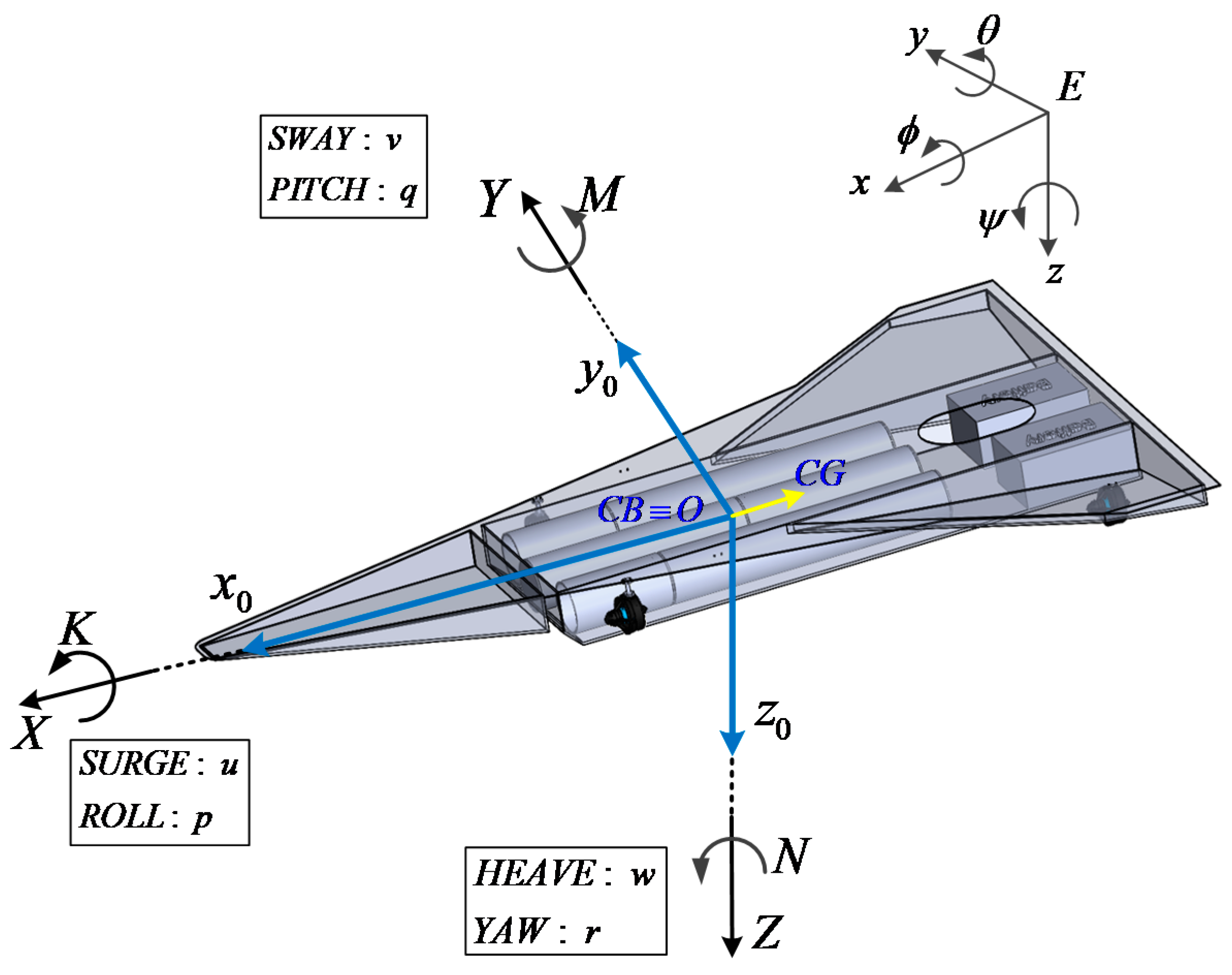
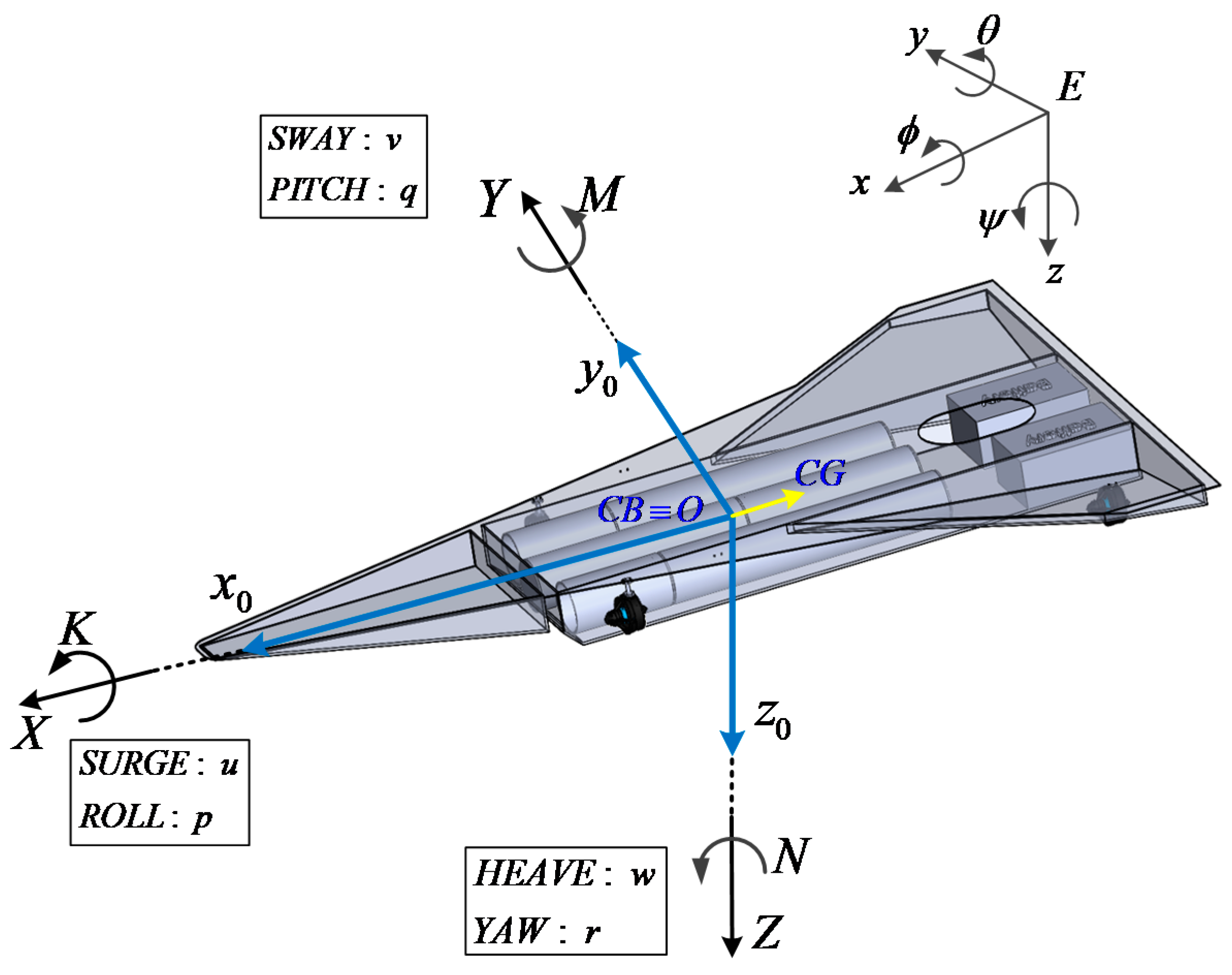
The six degrees of freedom (DOF) equations of motion of a fully submerged underwater vehicle, whose body axes coincide with the principal axes of inertia, can be written as [
12]
where
are the linear velocities of the origin
of the body-fixed frame;
are the angular velocities in the body-fixed frame;
are Euler angles in the earth-fixed frame;
are the position of the center of gravity (CG;
Figure 1) in the moving frame
;
are the forces acting on the vehicle in the body-fixed frame; and
are the moments acting on the vehicle in the body-fixed frame. The kinematic system can be driven by Euler angles as shown in Equation (2):
and if
, then
is
;
is
; and
is
.
The external force and moment vector contain three components:
. The hydrodynamic forces and moments,
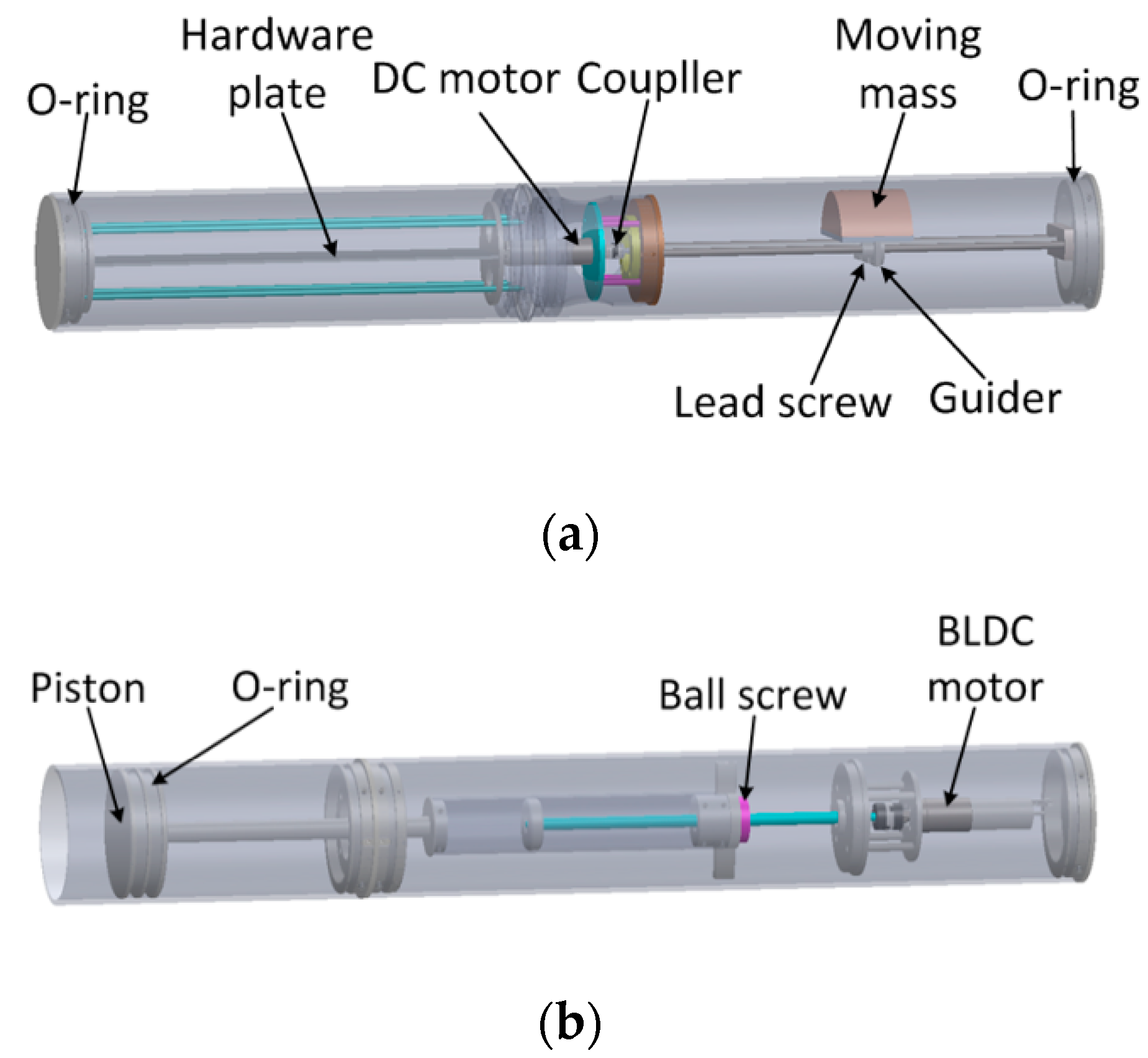
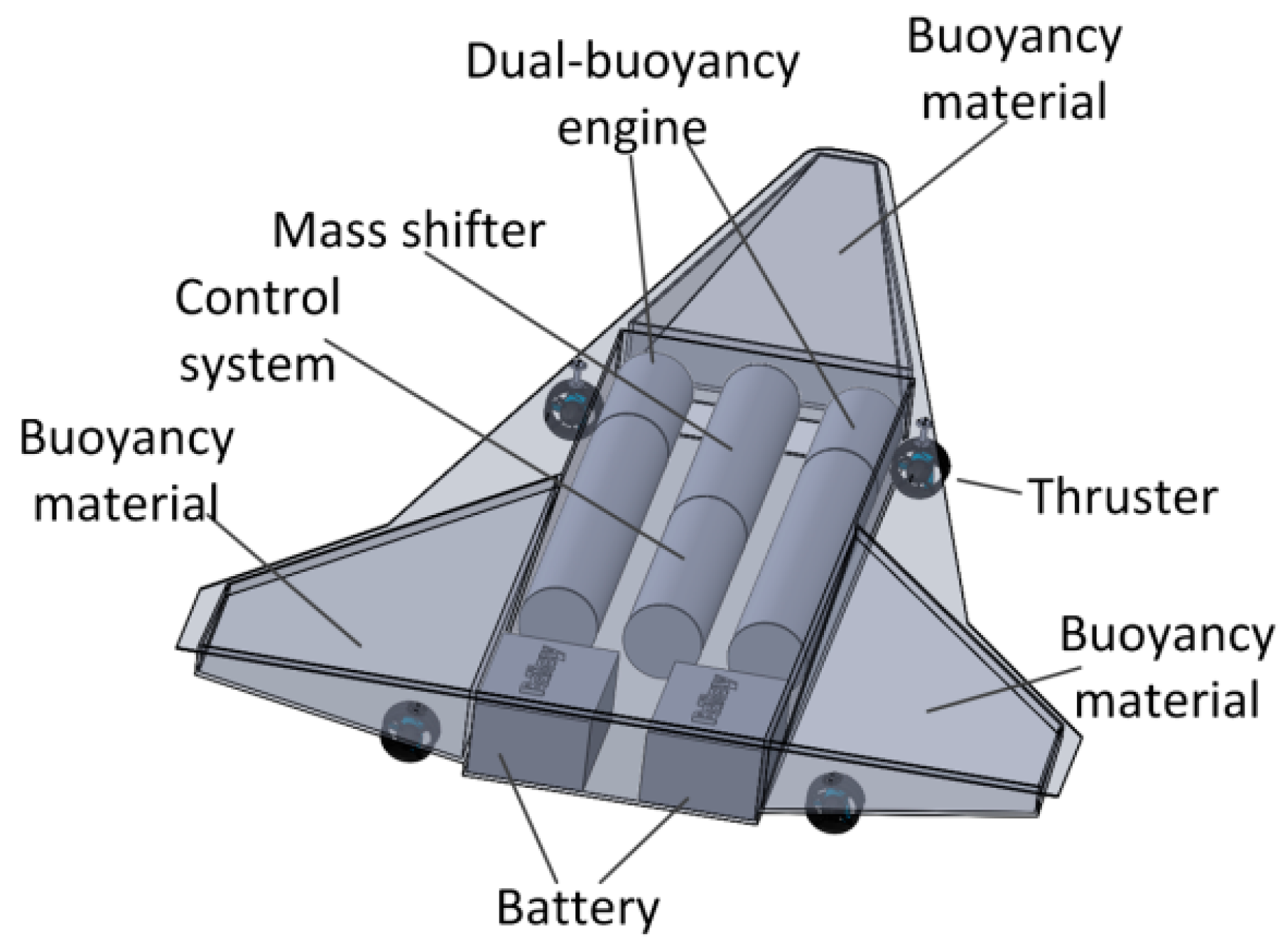
, can be estimated using CFD. The control input
is generated by thrusters, a moving mass (
Figure 2a) and buoyancy engines (
Figure 2b). Finally, the environmental input
is the disturbance from ocean currents and waves.
In the RHUG design described in
Figure 3 and
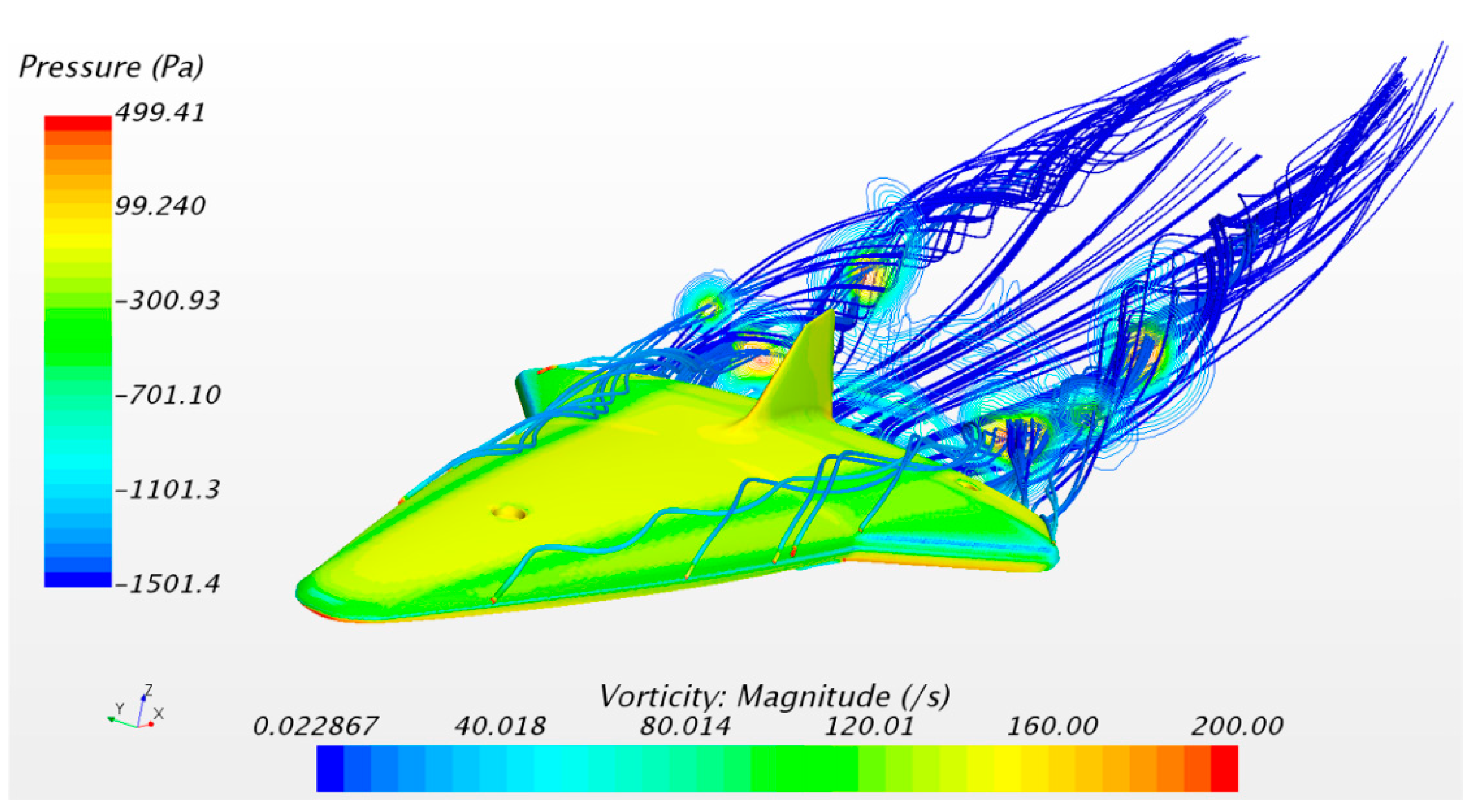
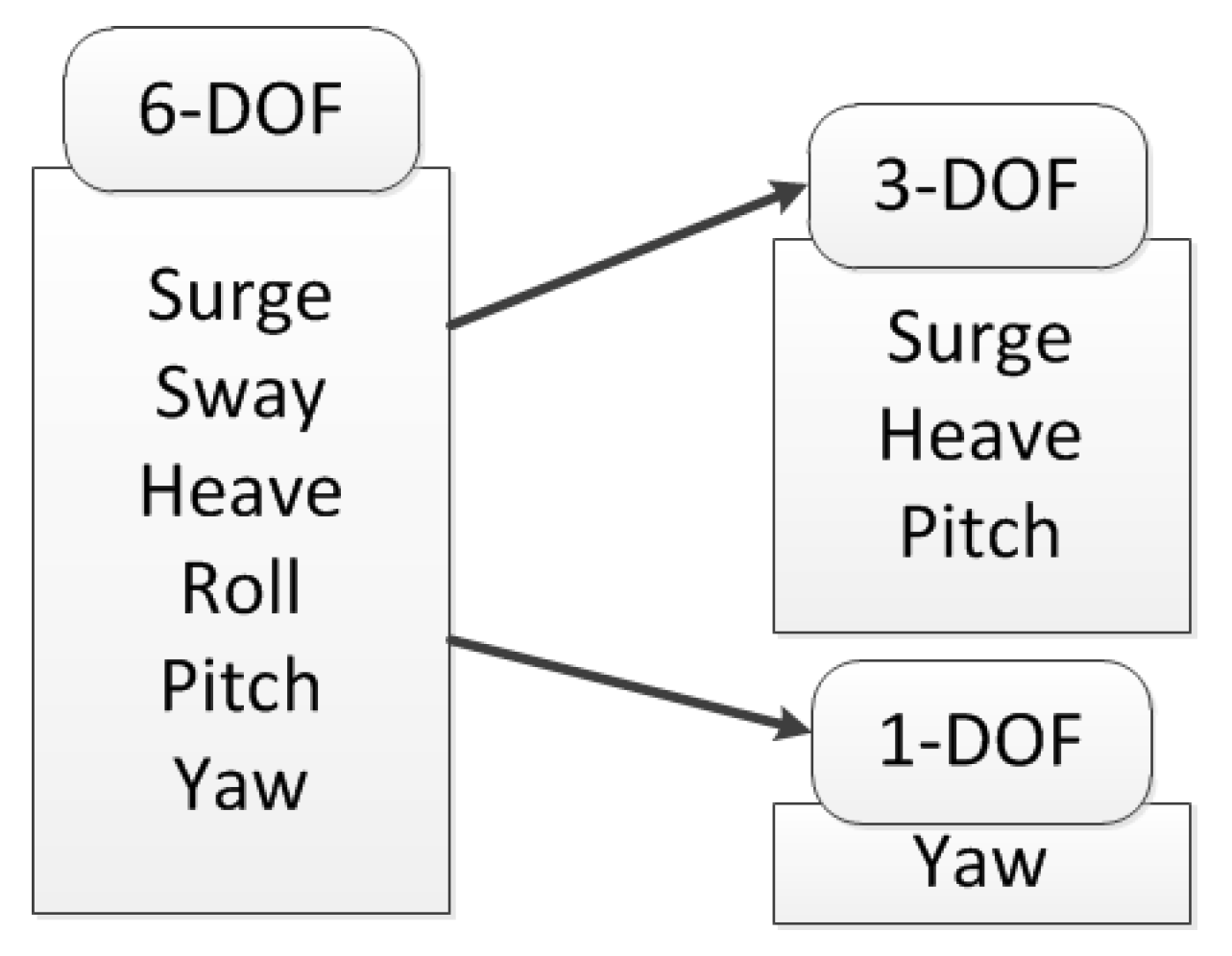
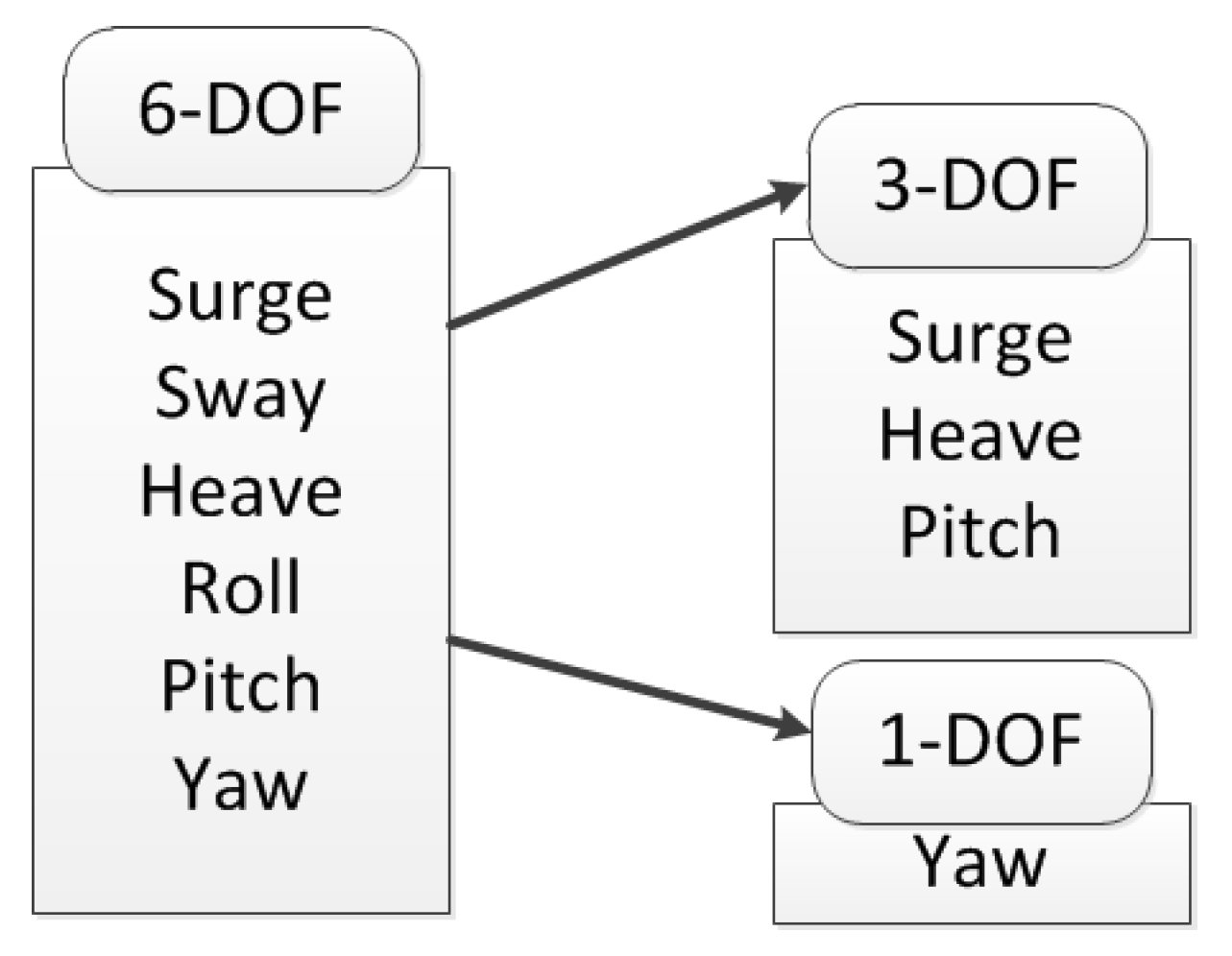
Table 1, the sway and roll dynamics do not have any actuators. For now, the stability of the roll motion is dependent on the vertical passive stabilizer, as shown by the CFD analysis result in
Figure 4. As the main objective of the RHUG hull design is gliding motion, the sway and roll dynamics were neglected in the RHUG modeling in this study. Under this condition, the dynamics of the RHUG are separated into two, as shown in
Figure 5. The first dynamics are surge–heave–pitch motion, which are the vertical-plane dynamics in the
plane. In the vertical-plane motion, the coupling terms among surge, heave, and pitch motions cannot be neglected in the RHUG gliding motion. The second type dynamics is yaw motion, which is heading motion. Therefore, the RHUG dynamics are presented in terms of vertical motion and heading motion individually.
The planar motion mechanism (PMM) test for the hydrodynamic coefficients is very expensive. Therefore, to obtain the hydrodynamic coefficients of this new hull design, CFD calculation is performed. One of the results of the vertical drift calculation that varies from
to
is presented in
Figure 4 as an example. In
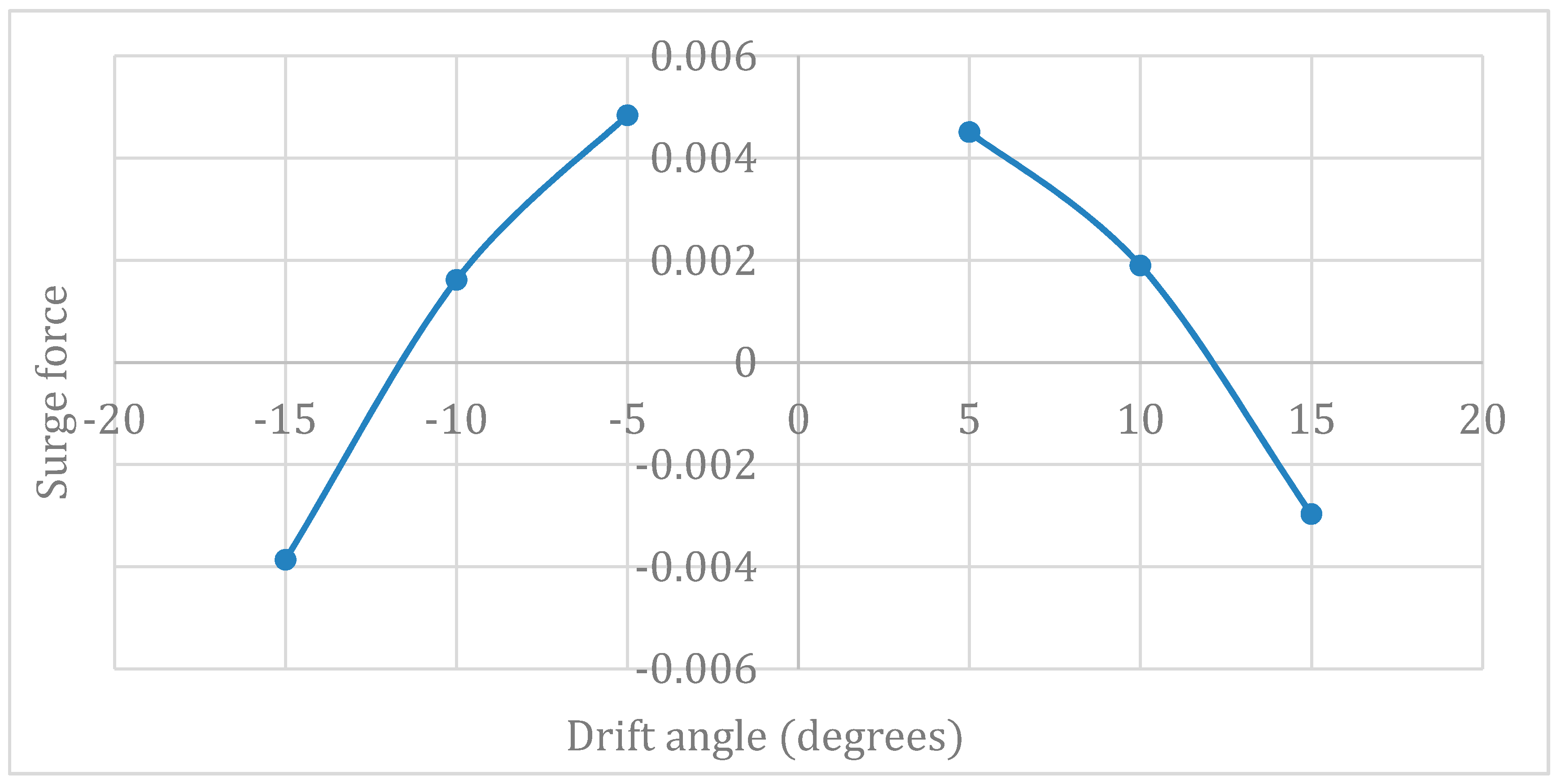
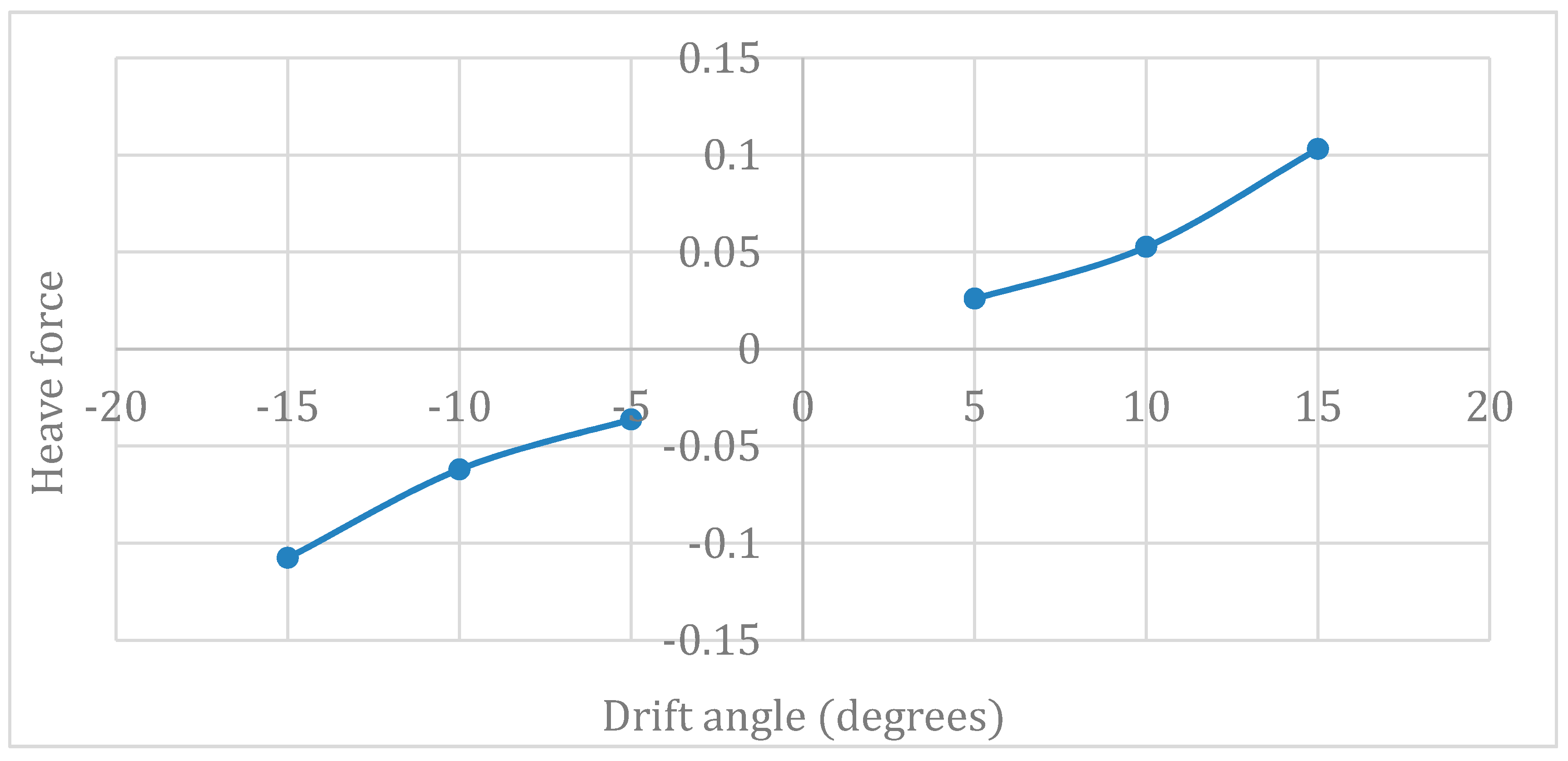
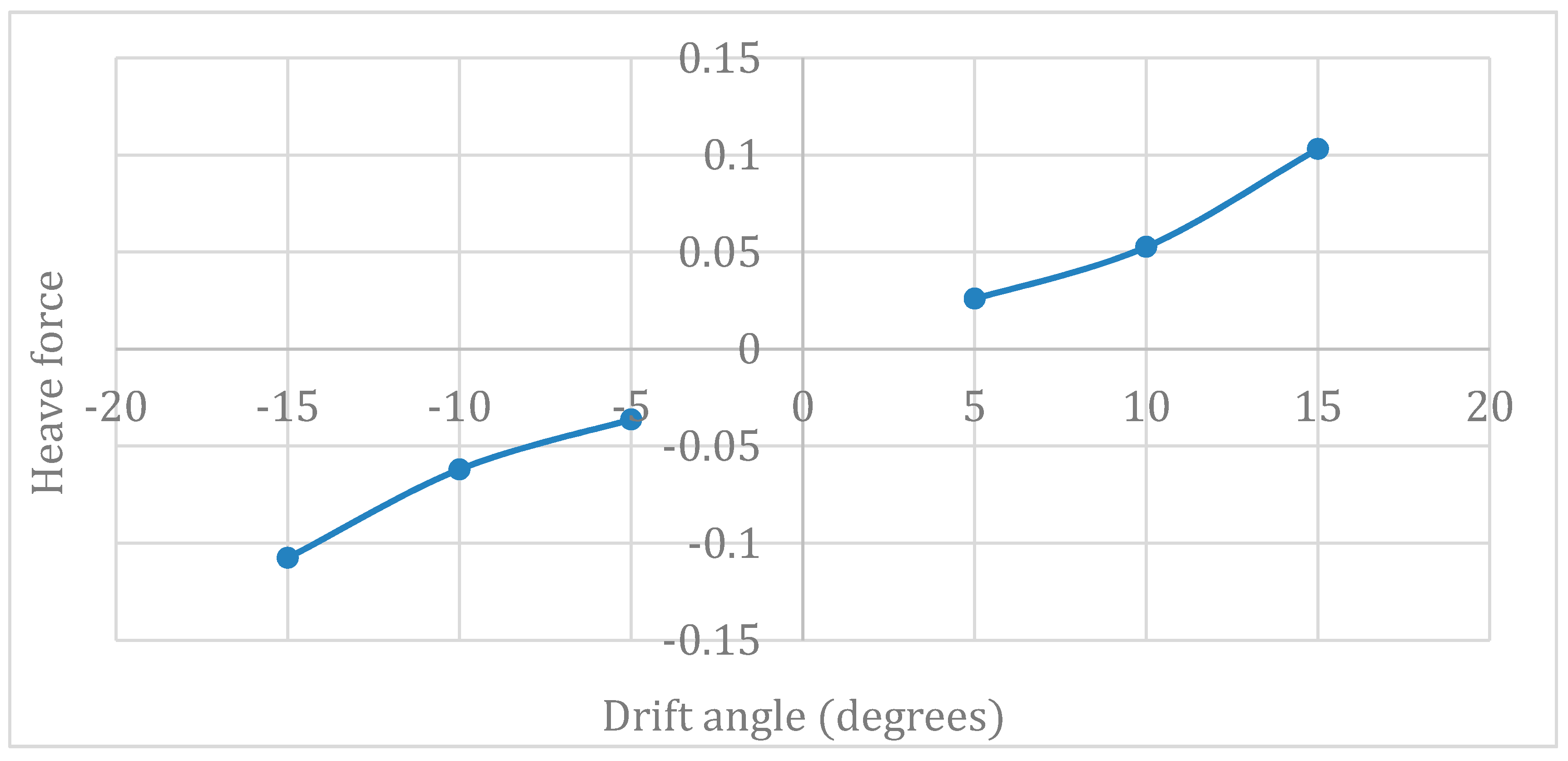
Figure 4, the surface contour on the RHUG hull indicates the pressure field acting on the hull. The line contour around the hull is the fluid flow in the vertical drift test. From the CFD calculations, we found that the weak vortex shedding occurred at the both wing edges. The surge and heave force acting on the RHUG hull in the various vertical drift angles are presented in
Figure 6 and
Figure 7, respectively.
The acting force in the surge direction was computed from pitch angles of
to
. In the drift calculation, the nondimensional maximum and minimum surge force are 0.0048 at
and –0.0039 at
, respectively, as shown in
Figure 6. The heave force acting on the hull was also calculated from a pitch angle of
to
. The magnitude of the nondimensional heave force increases as the magnitude of the pitch angle increases, as shown in
Figure 7. The dimensionless hydrodynamic coefficients from the CFD results are shown in
Table 2.
Here,
is the added mass coefficient in the surge motion;
and
are the added mass coefficients in the heave motion;
and
are the added mass coefficients in the pitch motion;
,
, and
are the hydrodynamic coefficients in the surge motion;
,
,
, and
are the hydrodynamic coefficients in the heave motion; and
,
,
, and
are the hydrodynamic coefficients in the pitch motion [
12].
By reducing the 6-DOF dynamics system, the vertical system, which is important for gliding motion, is described in Equation (3) using the resulting hydrodynamic coefficients in
Table 2.
where
is the vehicle weight;
is the buoyancy force;
and
are the coordinates of the center of buoyancy;
,
and
are the control inputs induced by the thrusters, buoyancy engines, and moving mass, respectively;
,
, and
are the environmental disturbances in the surge, heave, and pitch motions, respectively. The decoupled yaw dynamics of the underwater glider can be written as
where
is the yaw rate;
is the heading angle;
is the moment of inertia about the
axis;
is the added mass coefficient;
and
are the linear and quadratic damping coefficients, respectively;
is the torque of thrusters; and
is the external disturbance induced by currents and waves.
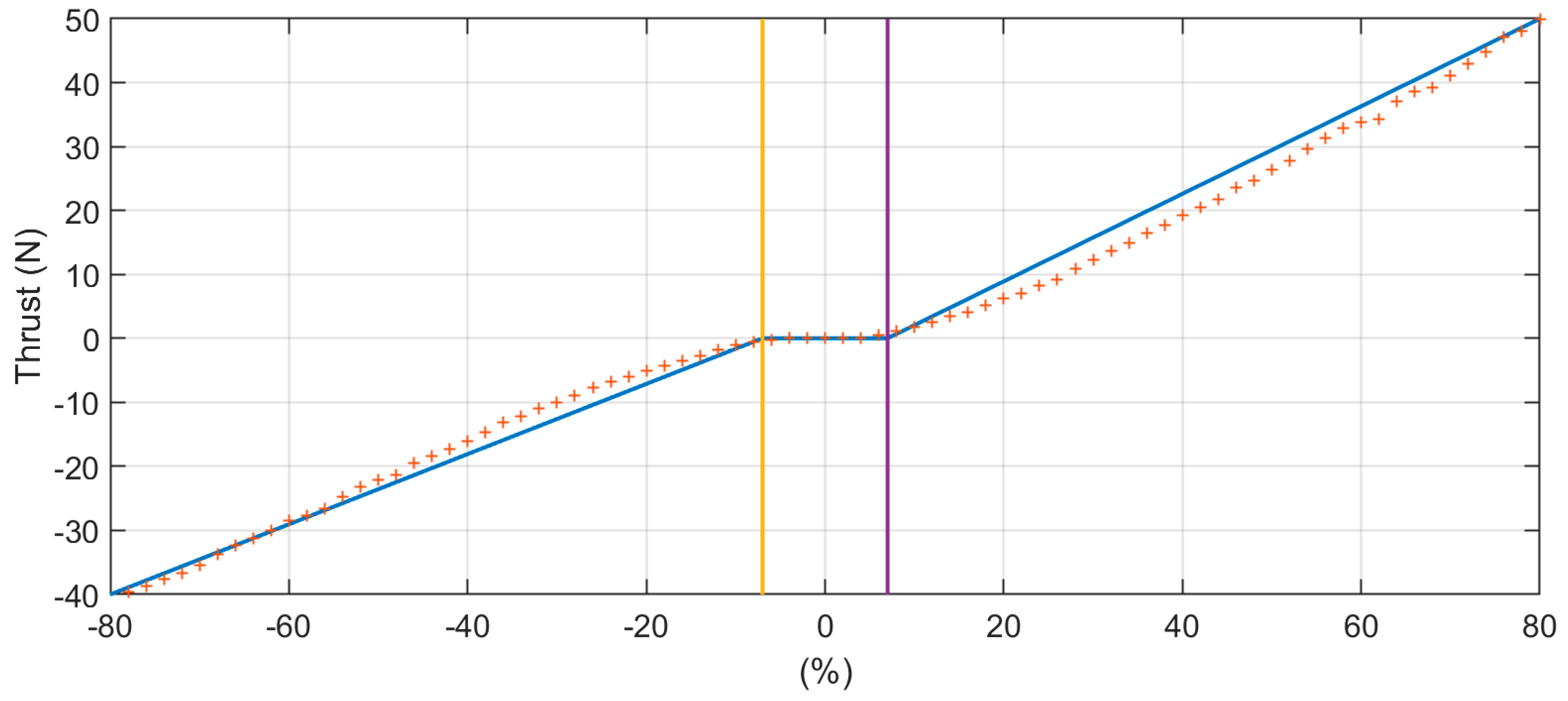
The thrusters in this platform were T200 thrusters (Blue Robotics, Torrance, CA). The experimental data were provided by Blue Robotics. In
Figure 8, the thrust force
ranges from –40 to 50 N with the input signal
ranging from –80 to 80%. This relationship can be illustrated as the set of equations in Equation (5), where the subscript letter
. The control force and moment can be calculated from thruster force using Equations (6) and (7), where
is the surge control input for speed control in the body-fixed frame,
is the yaw moment in the body-fixed frame,
and
are the forces of thrusters on the starboard,
and
are the forces of thrusters on the stern,
is the distance of the two thrusters on the starboard, and
is the distance of two thrusters in the stern:
3. Robust Adaptive Control
The heading error can be defined as
where
is the reference of the heading control. The heading error dynamics can be obtained by taking the derivative of Equation (8):
By substituting Equation (4) into Equation (9), we obtain
where
is the yaw rate measurement,
is the desired yaw rate,
is the virtual control input introduced to stabilize the heading error dynamics, and
is the error between the yaw rate and the virtual control input in Equation (11).
Based on the heading error dynamics in Equation (10), the virtual control can be designed as
where
is the positive control gain. The magnitude of the gain
affects the convergence rate of the system in Equation (13). If
tends to 0 while the time
t tends to
, then the system in Equation (13) will be asymptotically stable.
The derivative of
should be obtained for further stability analysis. By differentiating Equation (11), we obtain the derivative of
:
The control input
can be seen in
by substituting Equation (4) into Equation (14), and the final derivative of
is
where
is the positive inertia term,
,
, and the derivative of the virtual control is
where
is the desired yaw acceleration. The desired yaw rate
and the desired yaw acceleration
are normally assigned as zero.
The sliding surface function is
where
is the positive weight constant between
and
. To reduce the chattering issue in sliding mode control, the new variable is defined as
where
and
is the constant boundary layer of the saturation function. The inertia term
is always positive; then, the Lyapunov candidate can be designed as
where
is the positive constant matrix,
is the estimate error of parameter vector
, and
is the estimated value of
. The constant parameter vector
is derived later in the time derivative of the Lyapunov function, which can be derived as
By substituting Equations (13) and (15) into Equation (21), we obtain
To design the adaptation law for
, the unknown term should be described as
where
is the regressive vector of state variables and reference. In other words,
can be determined by the heading angle
, yaw rate
, desired heading angle
, desired yaw rate
, and desired yaw acceleration
. Accordingly, the parameter vector
is
. Then, the derivative of
can be rewritten as
The actual control input
can be designed using Equation (24):
where
is the mean value of the wave-form disturbance,
is the positive stabilizing gain, and
is the positive gain in sliding mode control. By applying this control law into Equation (24),
is rewritten as
By canceling the group of
and
, the adaptation law can be obtained:
Then, with the above adaptation, the derivative of the Lyapunov function is derived as
, and . Therefore, an inequality can be derived in Equation (29) from Equation (28).
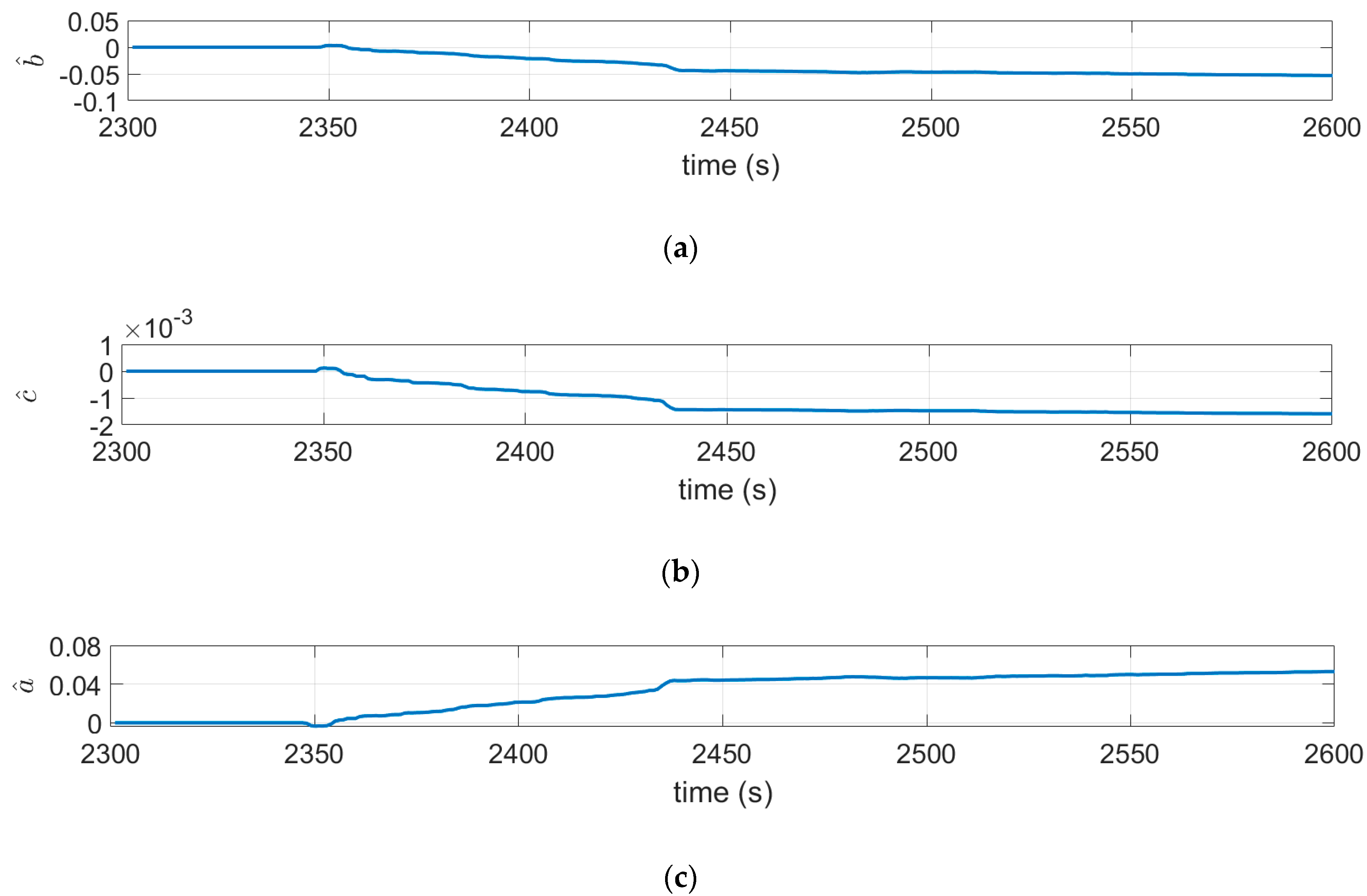
Due to the unknown nominal value of the parameters, cannot be estimated using nonlinear observers. Then, the estimation of ocean currents and waves can be assumed to be equal to zero, and the bounds of disturbances can be used as the tuning gain in different environments. This assumption is reasonable because the current and wave disturbances can be modeled as a sinusoidal function with zero mean ( ). Therefore, is negative definite as described in Equation (30), if and only if . Then, can be experimentally tuned as the maximum of environmental moment acting on the vehicle.
Using Barbalat’s lemma, is positive definite and is negative definite, then as . This implies that as or as . In other words, with the control law defined in Equation (25), the sliding quantity . approaches and stays within the constant boundary layer .
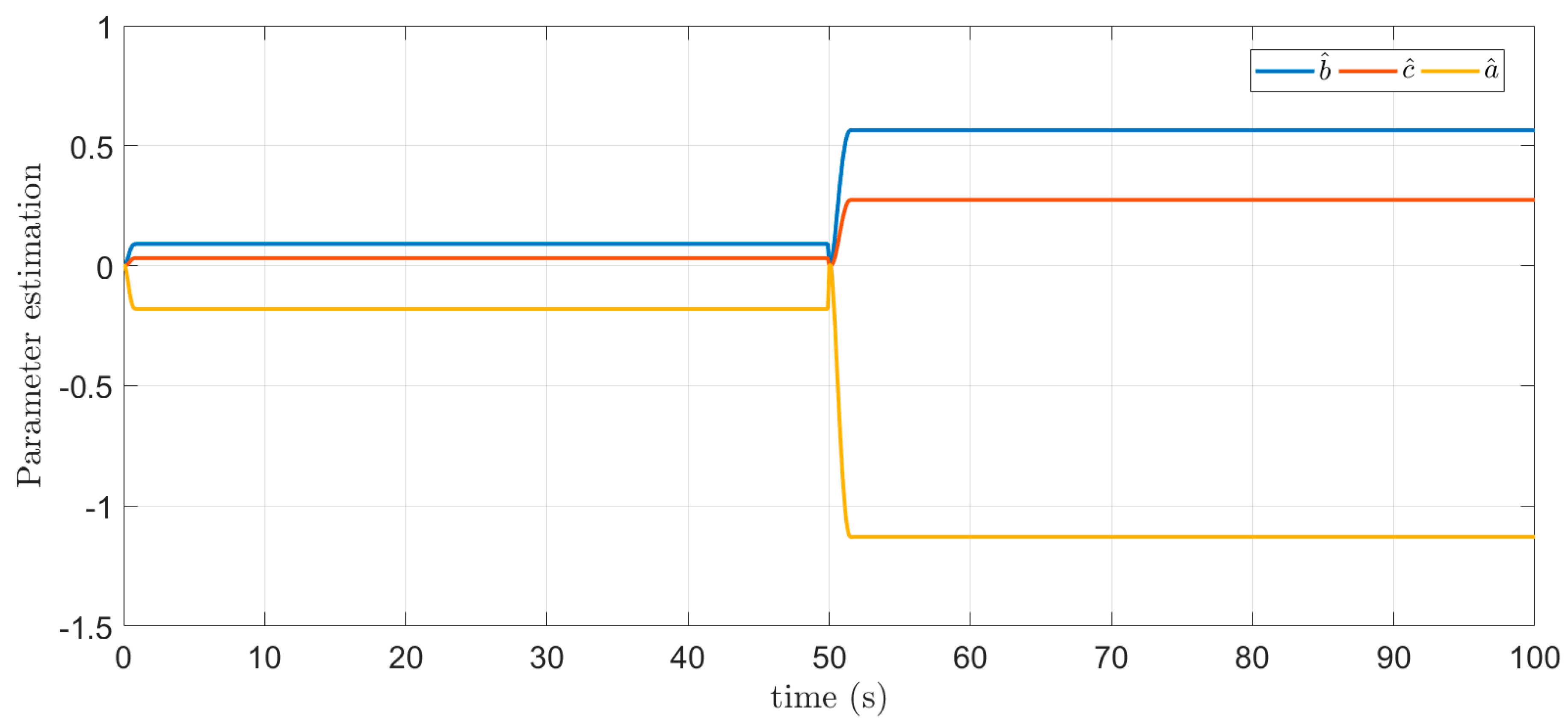
Notably, Equation (30) does not guarantee that the estimation error of the parameters converge to zero. The parameter estimates can be viewed as extra states of the controller that help with the control task.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}