Robust Capon Beamforming against Steering Vector Error Dominated by Large Direction-of-Arrival Mismatch for Passive Sonar


Abstract
:1. Introduction
2. Backgrounds
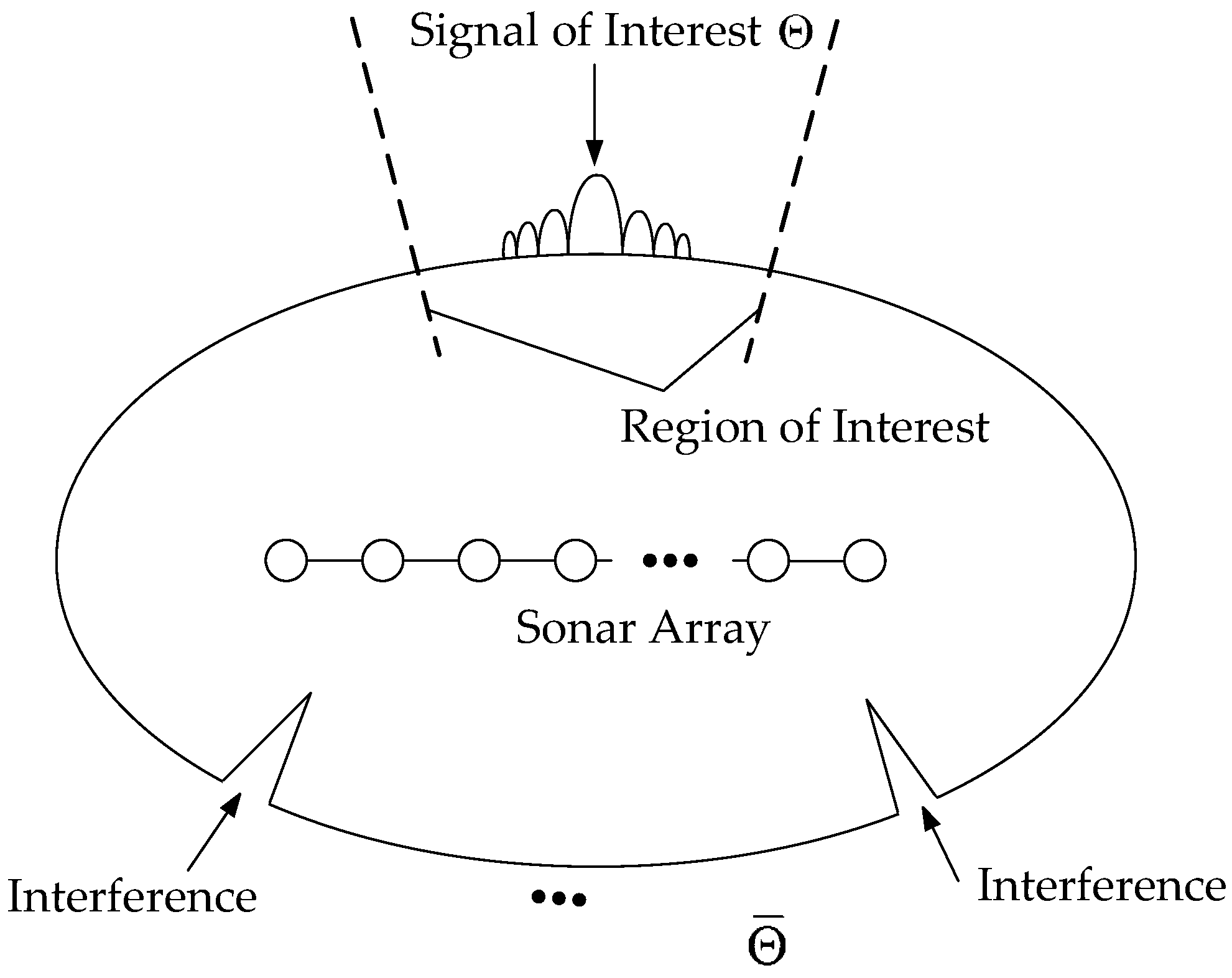
2.1. Array Signal Model
2.2. Capon Beamforming
2.3. Effects of Steering Vector Error
3. Proposed Method
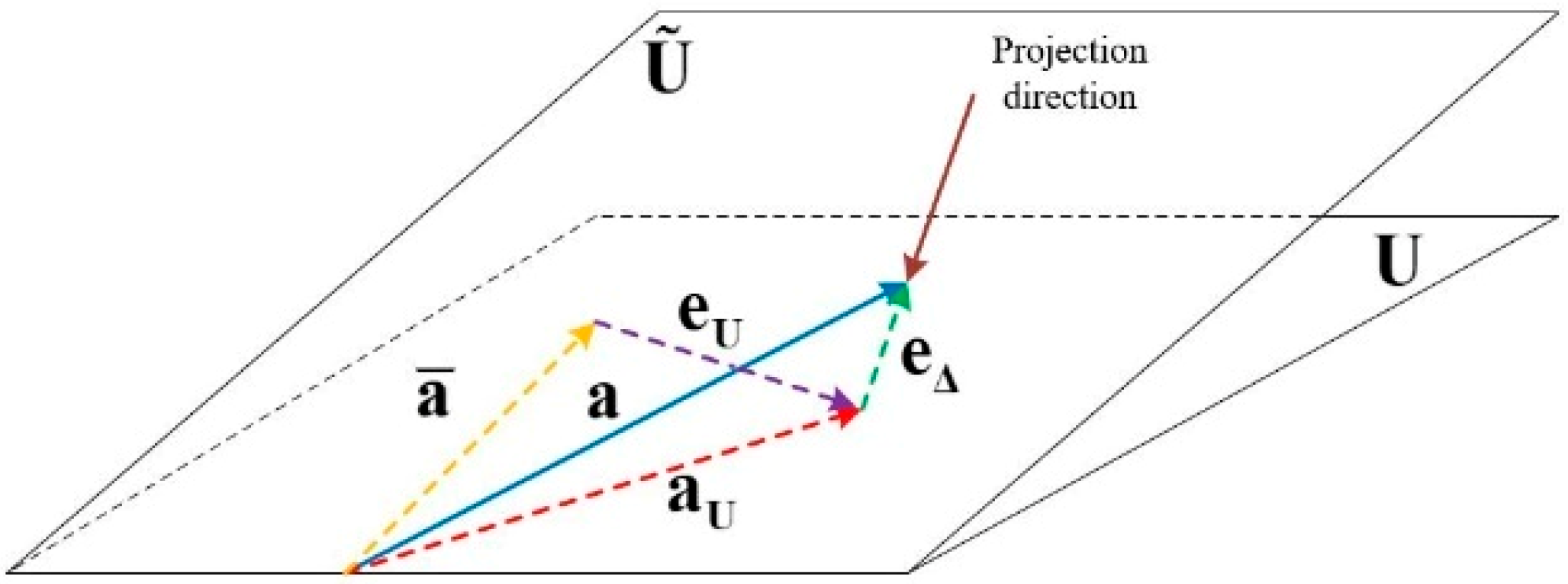
3.1. Actual Steering Vector Decomposition
3.2. Oblique Projection Steering Vector Estimation
| Algorithm 1. Procedure leading to an optimal solution to (24) |
| Input: , , and Output: An optimal solution to (24) 1: solve the SDP problem (27) and find an optimal solution . 2: if , then 3: find the optimal solution via eigen-decomposition, i.e., 4: else if , then 5: find 6: else, then 7: find 8: end if 9: return |
3.3. Actual Steering Vector Estimation
| Algorithm 2. Procedure leading to an optimal solution to (38) |
| Input: , and Output: An optimal solution to (38) 1: solve the SDP problem (41), find an optimal solution and the optimal value . 2: let 3: if , then 4: perform an eigen-decomposition, 5: else if , then 6: find 7: else, then 8: find 9: end if 10: return |
3.4. Proposed Robust Capon Beamformer
4. Simulations
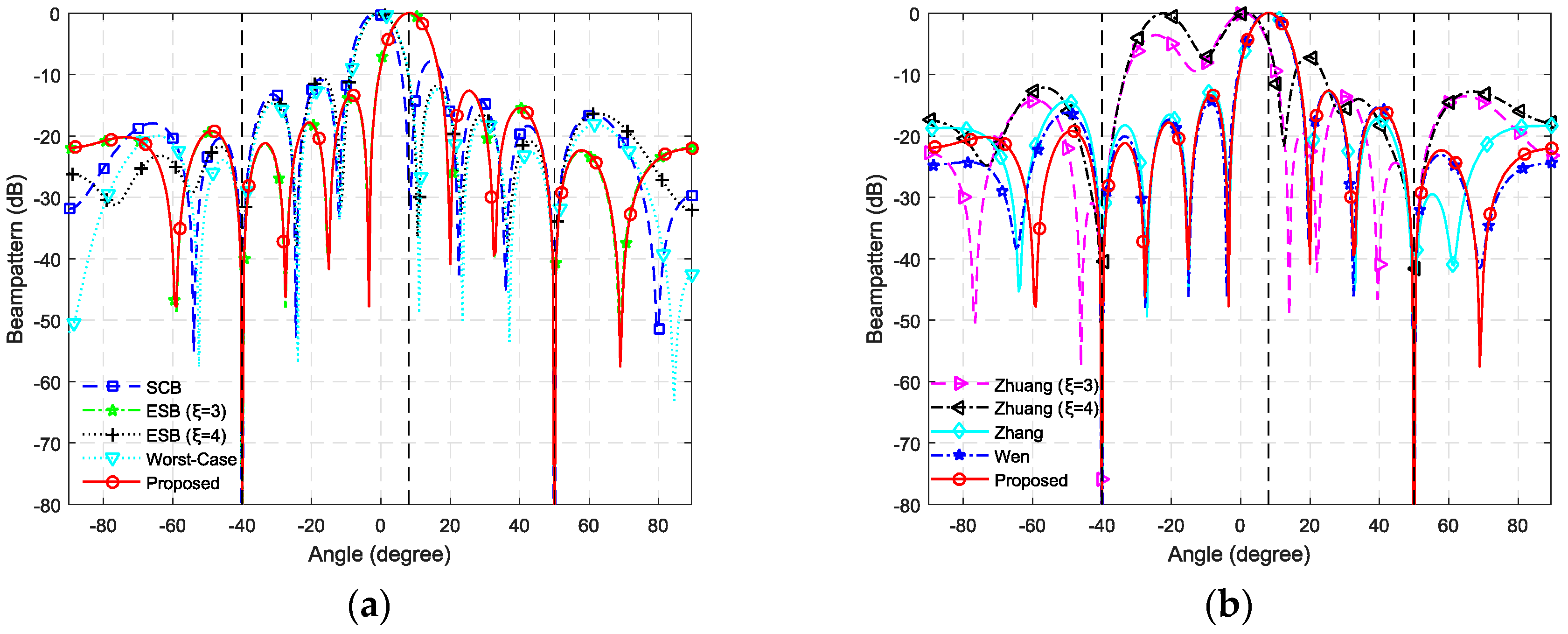
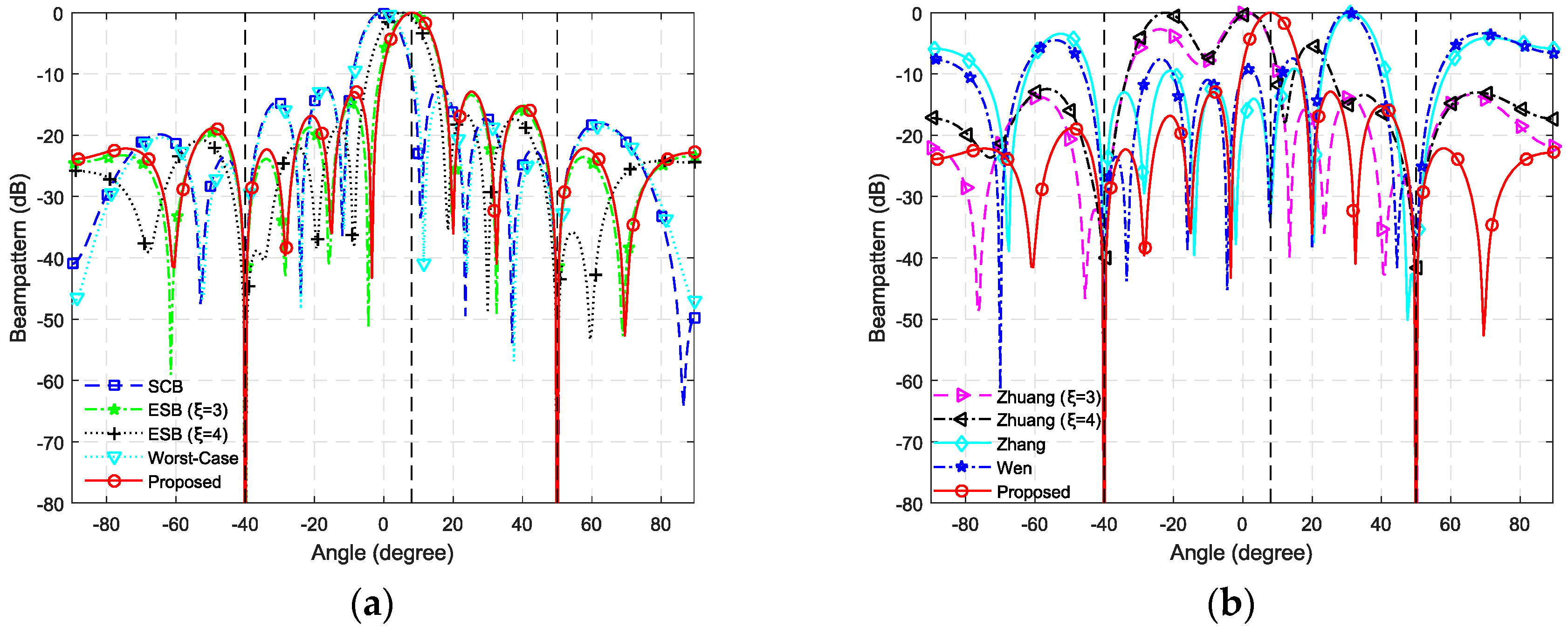
4.1. Beampatterns
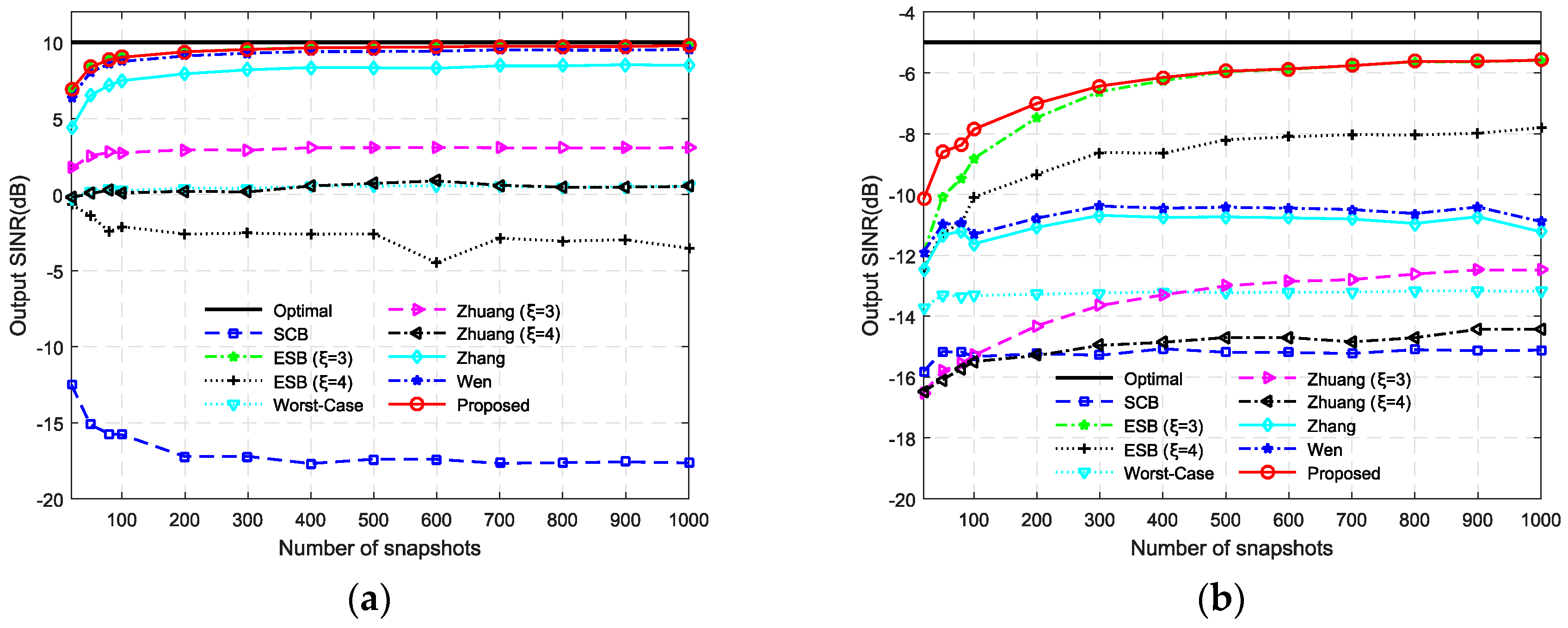
4.2. Output SINR versus Number of Snapshots
4.3. Output SINR versus Input SNR
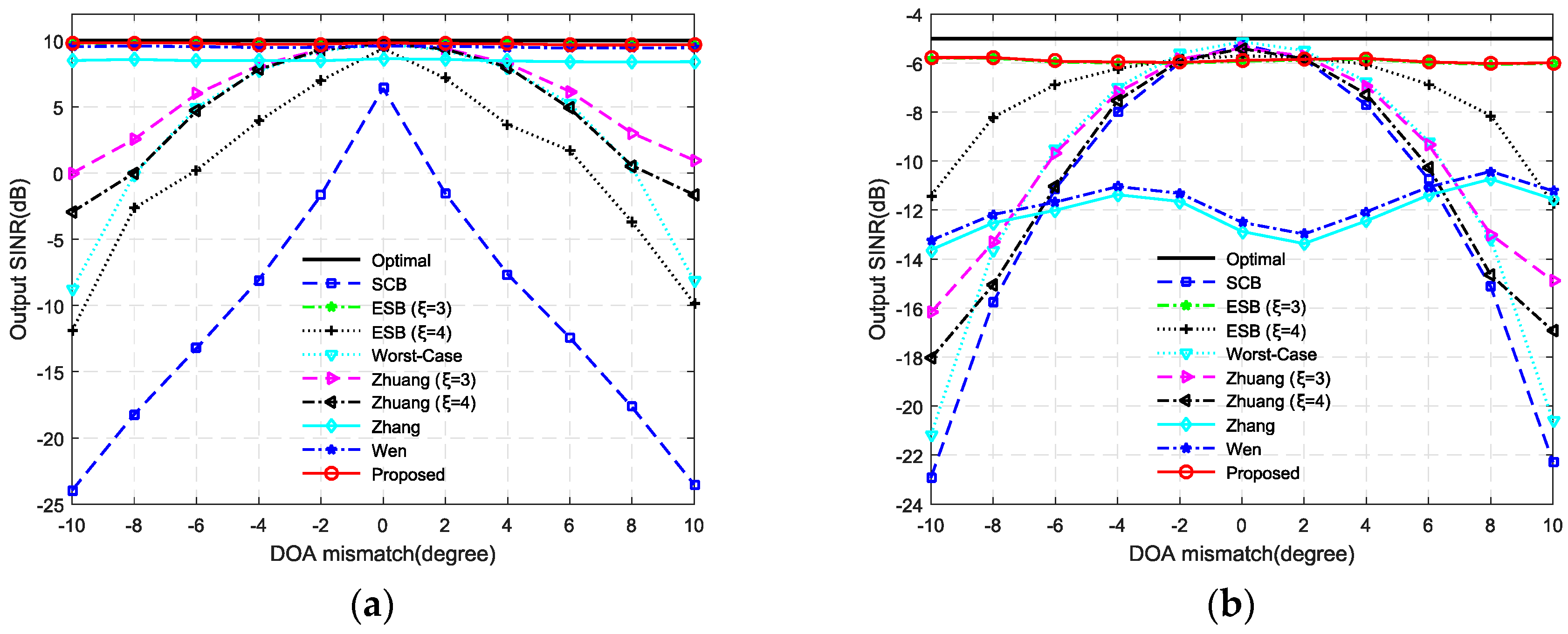
4.4. Output SINR versus DOA Mismatch
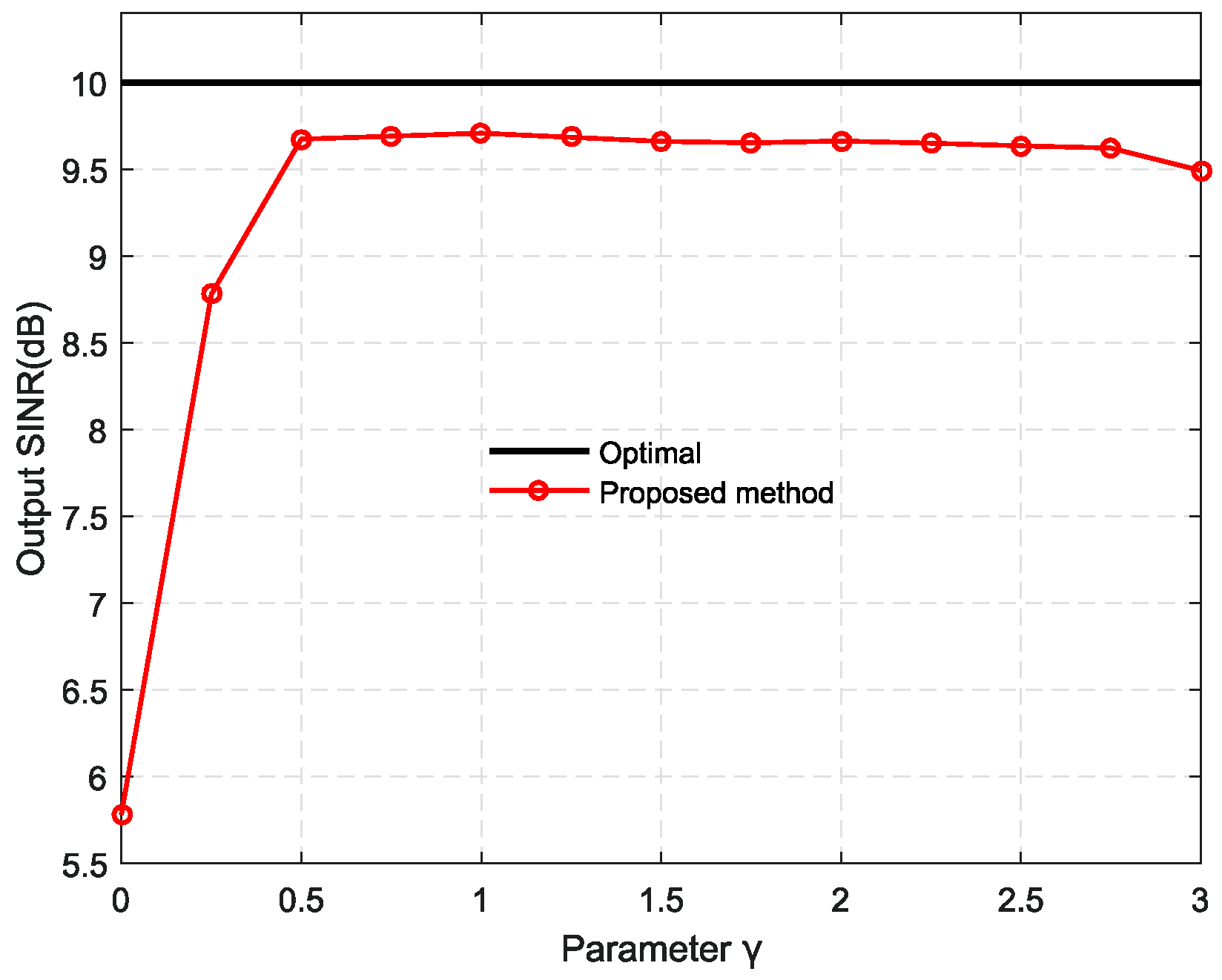
4.5. Output SINR versus Parameter
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Capon, J. High-resolution frequency-wavenumber spectrum analysis. Proc. IEEE 1969, 57, 1408–1418. [Google Scholar] [CrossRef]
- Van Trees, H.L. Optimum Array Processing: Part IV of Detection, Estimation, and Modulation Theory; Wiley: New York, NY, USA, 2002; pp. 443–452. [Google Scholar]
- Somasundaram, S.D.; Parsons, N.H. Evaluation of robust Capon beamforming for passive sonar. IEEE J. Ocean. Eng. 2011, 36, 686–695. [Google Scholar] [CrossRef]
- Somasundaram, S.D.; Butt, N.R.; Jakobsson, A.; Hart, L. Low complexity uncertainty-set-based robust adaptive beamforming for passive sonar. IEEE J. Ocean. Eng. 2015, 99, 1–17. [Google Scholar] [CrossRef]
- Somasundaram, S.D. Wideband robust Capon beamforming for passive sonar. IEEE J. Ocean. Eng. 2013, 38, 308–312. [Google Scholar] [CrossRef]
- Li, J.; Stoica, P.; Wang, Z.S. On robust Capon beamforming and diagonal loading. IEEE Trans. Signal Process. 2003, 51, 1702–1715. [Google Scholar]
- Li, J.; Stoica, P.; Wang, Z.S. Robust adaptive beamforming. In Robust Adaptive Beamforming; Li, J., Stoica, P., Eds.; Wiley: New York, NY, USA, 2005; Volume 3, pp. 91–93. [Google Scholar]
- Li, Y.; Ma, H.; Yu, D.; Li, C. Iterative robust Capon beamforming. Signal Process. 2016, 118, 211–220. [Google Scholar] [CrossRef]
- Vorobyov, S.A.; Gershman, A.B.; Luo, Z.Q. Robust adaptive beamforming using worst-case performance optimization: A solution to the signal mismatch problem. IEEE Trans. Signal Process. 2003, 51, 313–324. [Google Scholar] [CrossRef]
- Li, J.; Stoica, P.; Wang, Z.S. Doubly constrained robust Capon beamformer. IEEE Trans. Signal Process. 2004, 52, 2407–2423. [Google Scholar] [CrossRef]
- Beck, A.; Eldar, Y.C. Doubly constrained robust capon beamformer with ellipsoidal uncertainty sets. IEEE Trans. Signal Process. 2007, 55, 753–758. [Google Scholar] [CrossRef]
- Chang, L.; Yeh, C.C. Performance of DMI and eigenspacebased beamformers. IEEE Trans. Antennas Propag. 1992, 40, 1336–1347. [Google Scholar] [CrossRef]
- Hassanien, A.; Vorobyov, S.A.; Wong, K.M. Robust adaptive beamforming using sequential quadratic programming: An iterative solution to the mismatch problem. IEEE Signal Process. Lett. 2008, 15, 733–736. [Google Scholar] [CrossRef]
- Khabbazibasmenj, A.; Vorobyov, S.A.; Hassanien, A. Robust adaptive beamforming based on steering vector estimation with as little as possible prior information. IEEE Trans. Signal Process. 2012, 60, 2974–2987. [Google Scholar] [CrossRef]
- Fan, Z.; Liang, G. Self-steered robust adaptive beamforming. In Proceedings of the 2016 IEEE/OES China Ocean Acoustics (COA), Harbin, China, 9–11 January 2016. [Google Scholar]
- Zhuang, J.; Manikas, A. Interference cancellation beamforming robust to pointing errors. IET Signal Process. 2013, 7, 120–127. [Google Scholar] [CrossRef]
- Zhang, W.; Wang, J.; Wu, S. Robust Capon beamforming against large DOA mismatch. Signal Process. 2013, 93, 804–810. [Google Scholar] [CrossRef]
- Wen, J.; Zhou, X.; Zhang, W.; Liao, B. Robust adaptive beamforming against significant angle mismatch. In Proceedings of the 2017 IEEE Radar Conference (RadarConf), Seattle, WA, USA, 8–12 May 2017. [Google Scholar]
- Shahbazpanahi, S.; Gershman, A.B.; Luo, Z.Q.; Wong, K.M. Robust adaptive beamforming for general-rank signal models. IEEE Trans. Signal Process. 2003, 51, 2257–2269. [Google Scholar] [CrossRef]
- Luo, Z.Q.; Wong, K.M.; So, A.M.C.; Ye, Y.; Zhang, S. Semidefinite relaxation of quadratic optimization problems. IEEE Signal Process. Mag. 2010, 27, 20–34. [Google Scholar] [CrossRef]
- Mario, A.D.; Huang, Y.; Palomar, D.P.; Zhang, S.; Farina, A. Fractional QCQP with applications in ML steering direction estimation for radar detection. IEEE Trans. Signal Process. 2010, 59, 172–185. [Google Scholar]
- Ai, W.; Huang, Y.; Zhang, S. New results on Hermitian matrix rank-one decomposition. Math. Prog. 2011, 128, 253–283. [Google Scholar] [CrossRef]
- CVX: Matlab Software for Disciplined Convex Programming. Available online: http://www.standford.eud/boyd/cvx (accessed on 15 December 2018).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1. Calculate the sample covariance matrix as (9) 2. Estimate the actual steering vector in two steps: Step 1: Estimate the oblique projection steering vector via Algorithm 1 Step 2: Estimate the actual steering vector via Algorithm 2 and normalize it as (43) 3. Calculate the weight based on and as (44) |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hao, Y.; Zou, N.; Liang, G. Robust Capon Beamforming against Steering Vector Error Dominated by Large Direction-of-Arrival Mismatch for Passive Sonar. J. Mar. Sci. Eng. 2019, 7, 80. https://doi.org/10.3390/jmse7030080
Hao Y, Zou N, Liang G. Robust Capon Beamforming against Steering Vector Error Dominated by Large Direction-of-Arrival Mismatch for Passive Sonar. Journal of Marine Science and Engineering. 2019; 7(3):80. https://doi.org/10.3390/jmse7030080
Chicago/Turabian StyleHao, Yu, Nan Zou, and Guolong Liang. 2019. "Robust Capon Beamforming against Steering Vector Error Dominated by Large Direction-of-Arrival Mismatch for Passive Sonar" Journal of Marine Science and Engineering 7, no. 3: 80. https://doi.org/10.3390/jmse7030080
APA StyleHao, Y., Zou, N., & Liang, G. (2019). Robust Capon Beamforming against Steering Vector Error Dominated by Large Direction-of-Arrival Mismatch for Passive Sonar. Journal of Marine Science and Engineering, 7(3), 80. https://doi.org/10.3390/jmse7030080