Morphodynamic Acceleration Techniques for Multi-Timescale Predictions of Complex Sandy Interventions




Abstract
:1. Introduction
2. Morphodynamic Acceleration Techniques
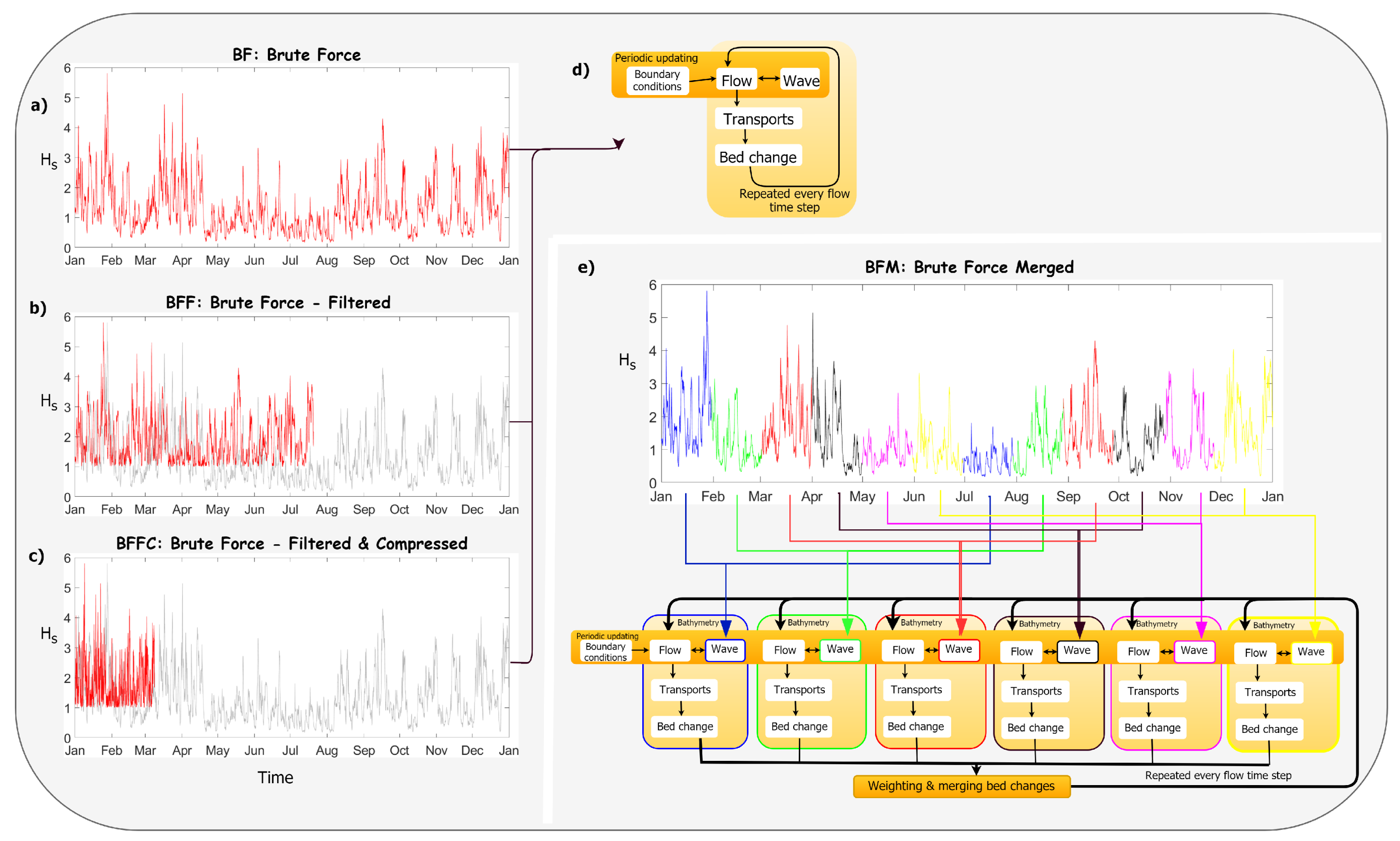
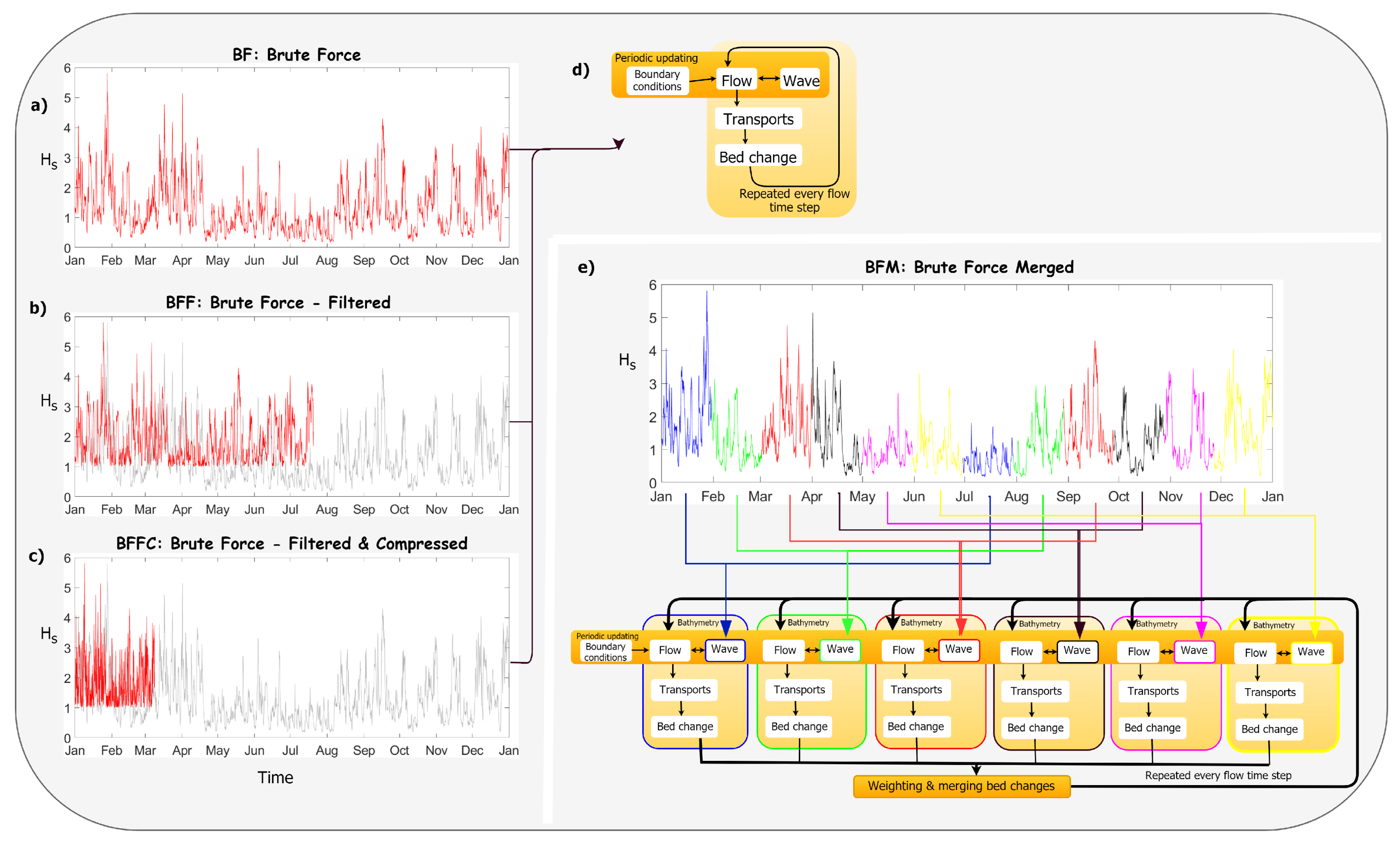
2.1. Techniques Using Brute Force Time Series
2.1.1. Existing Brute Force Techniques
2.1.2. New Technique: Brute Force Merged
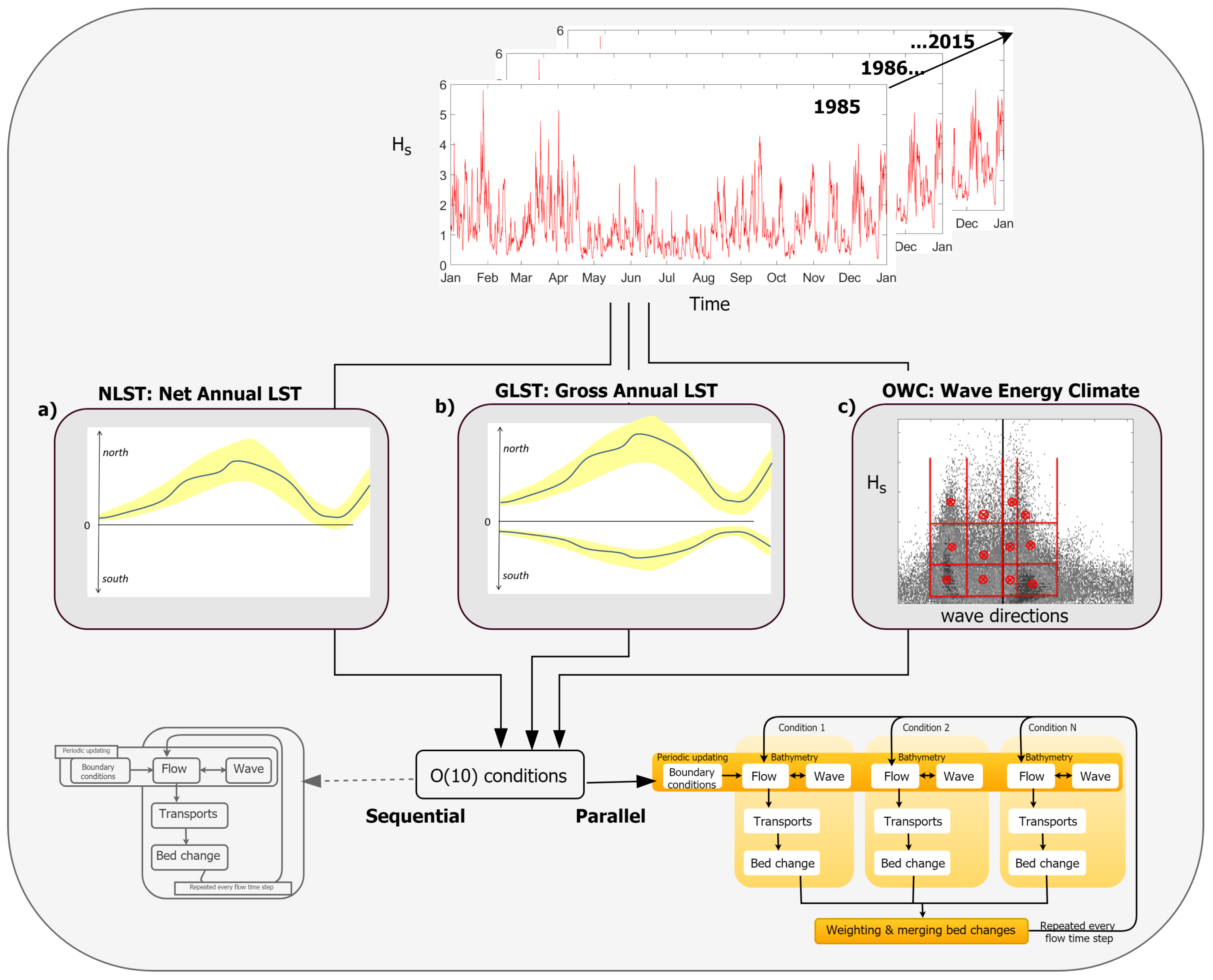
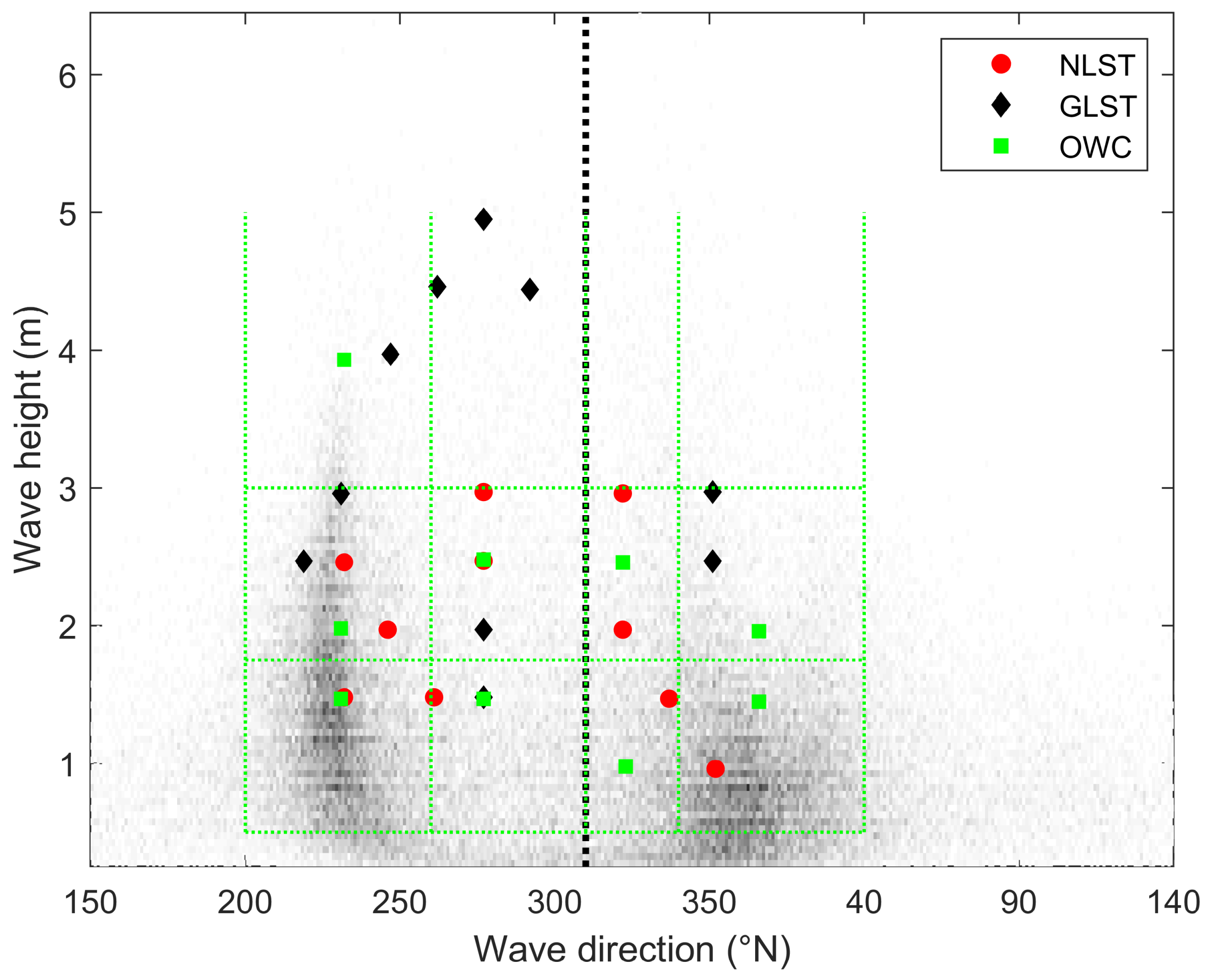
2.2. Techniques Using Representative Wave Conditions
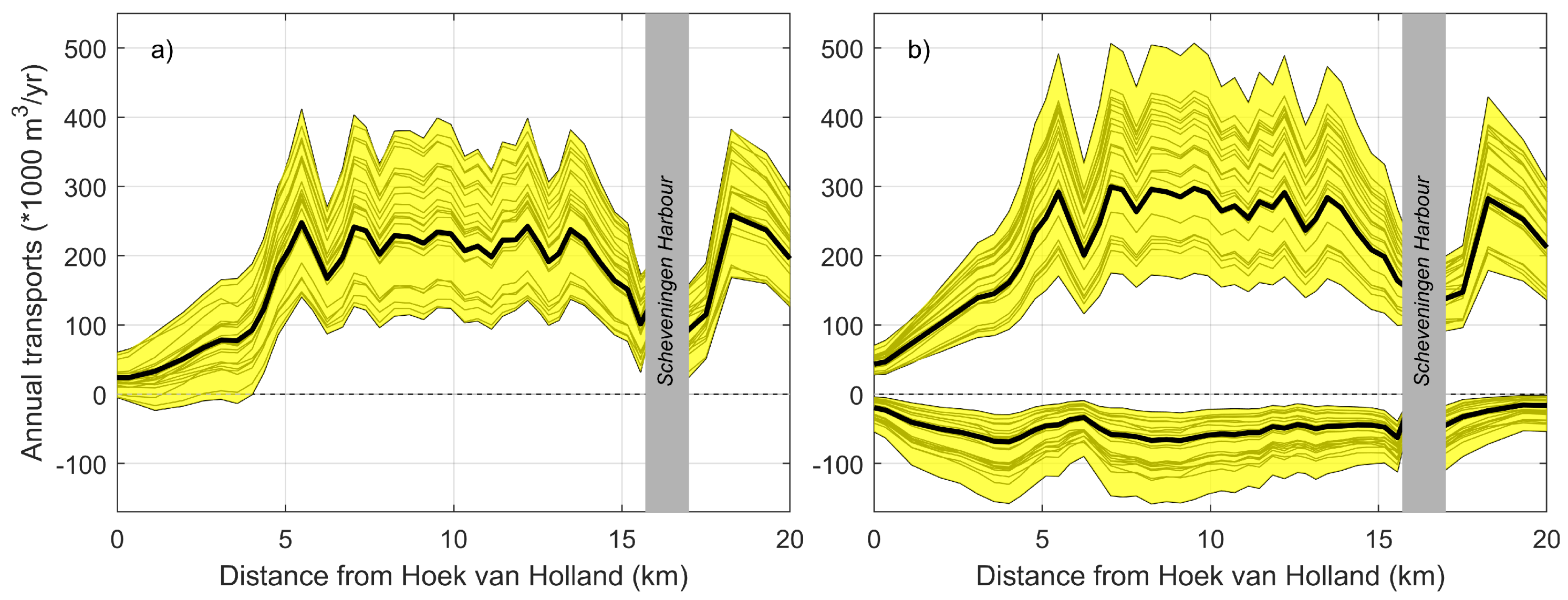
2.2.1. Input Reduction Based on Longshore Sediment Transports
2.2.2. Input Reduction Based on Offshore Wave Climate
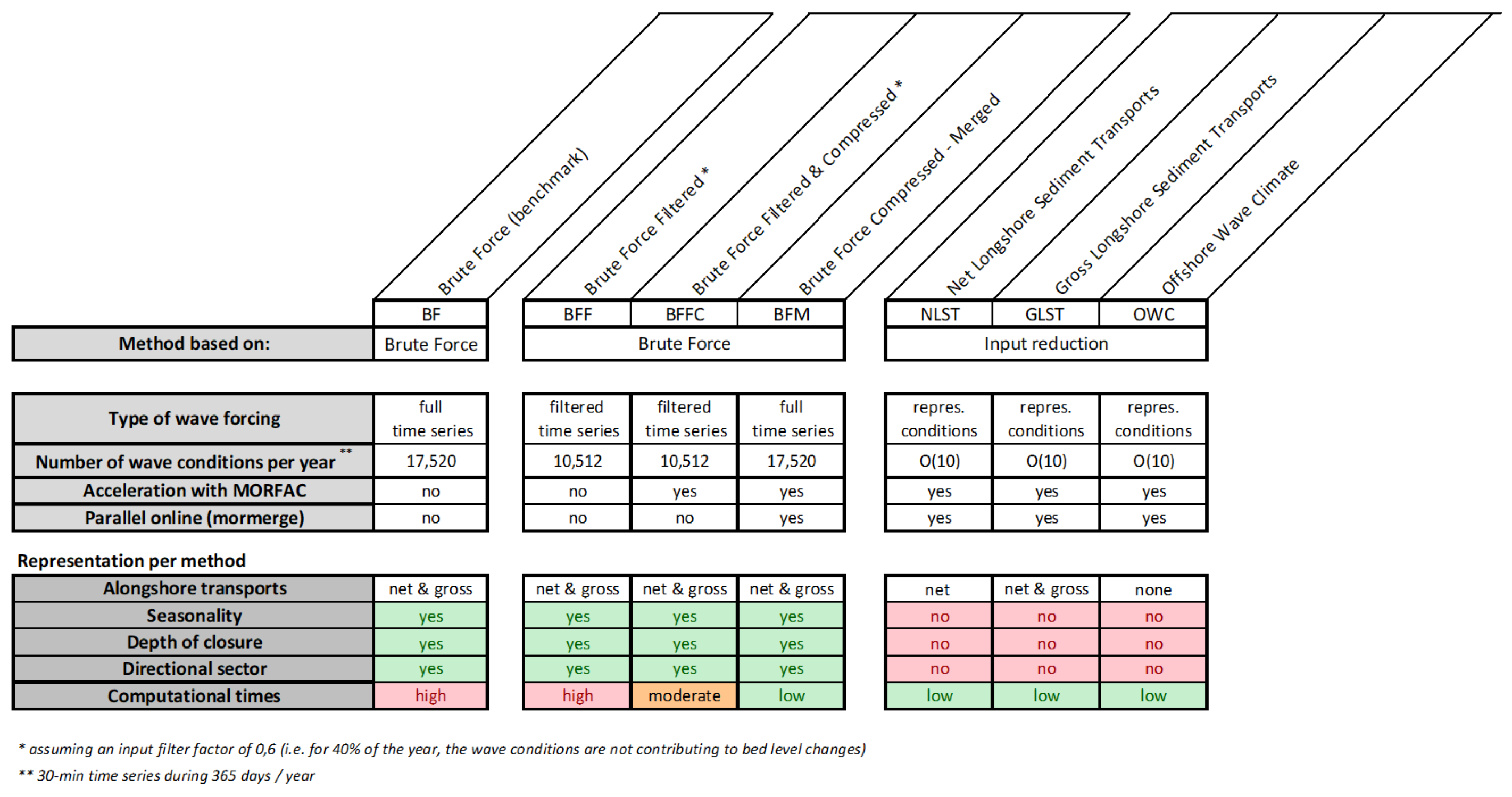
2.3. Strengths and Limitations of the Morphodynamic Acceleration Techniques Considered
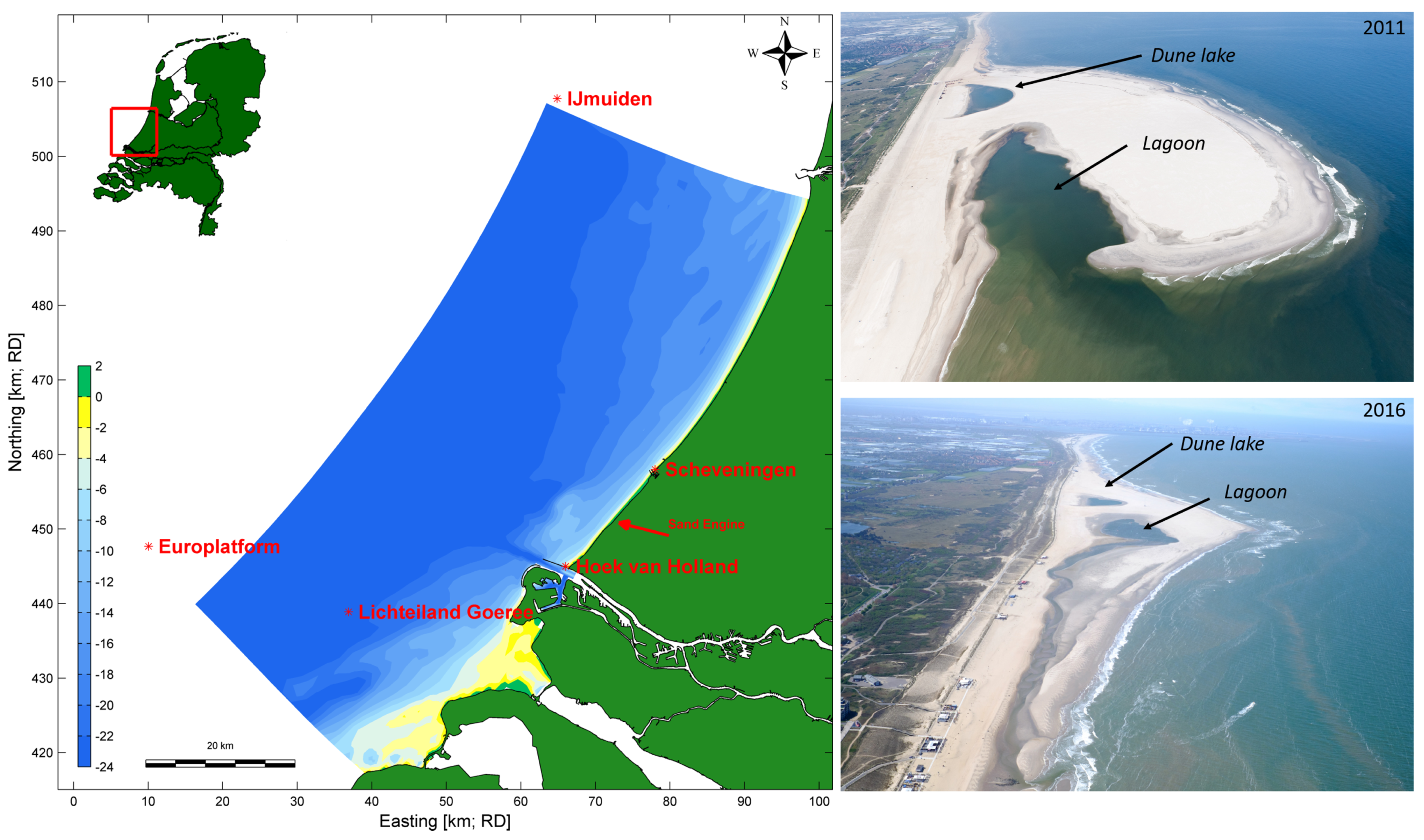
3. Case Study: The Sand Engine
3.1. Case Description
3.2. Numerical Model Setup for Delfland Coast
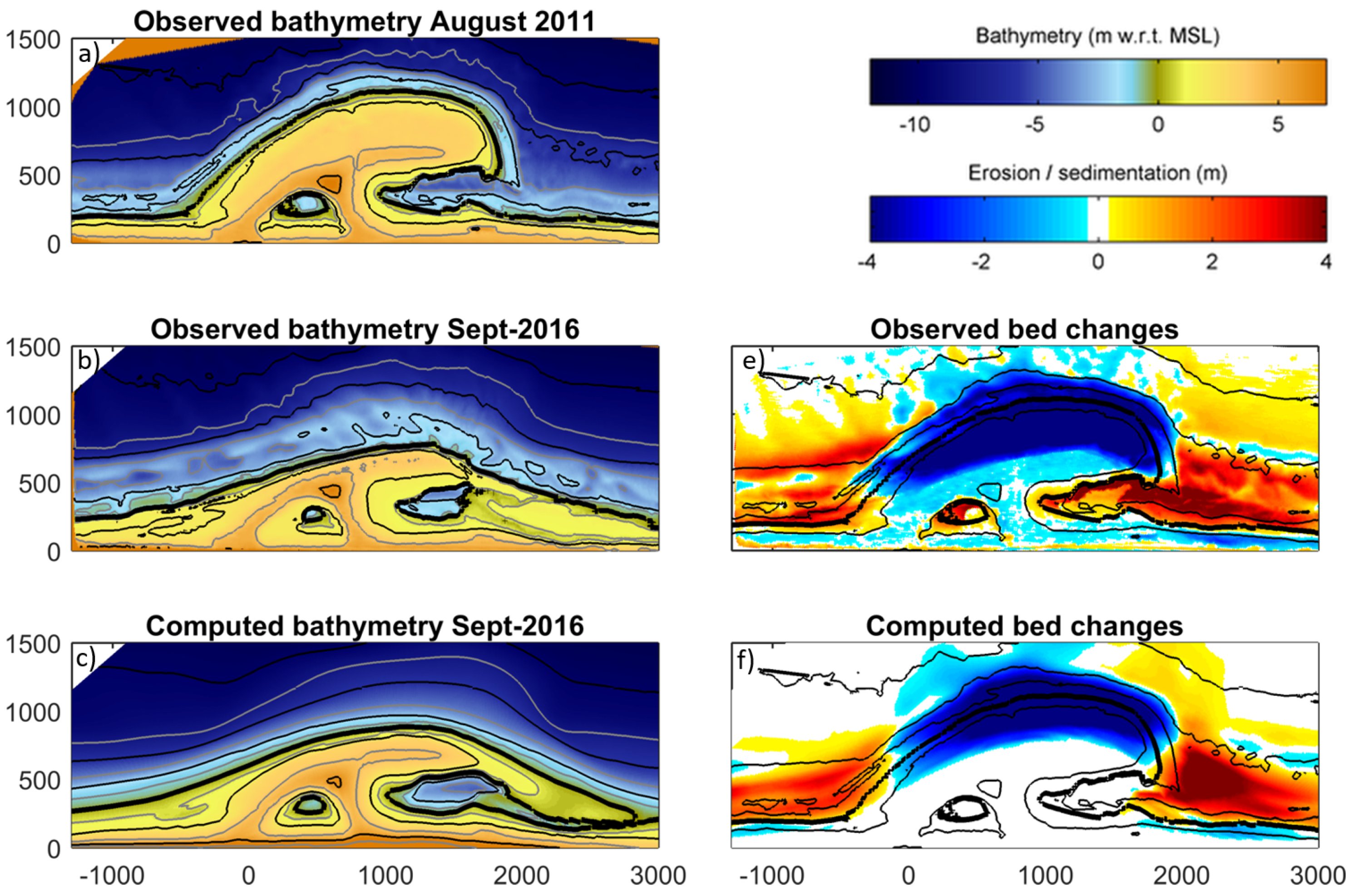
3.3. Validation of the Benchmark Simulation without Upscaling (Brute Force)
3.3.1. Morphodynamic Evolution
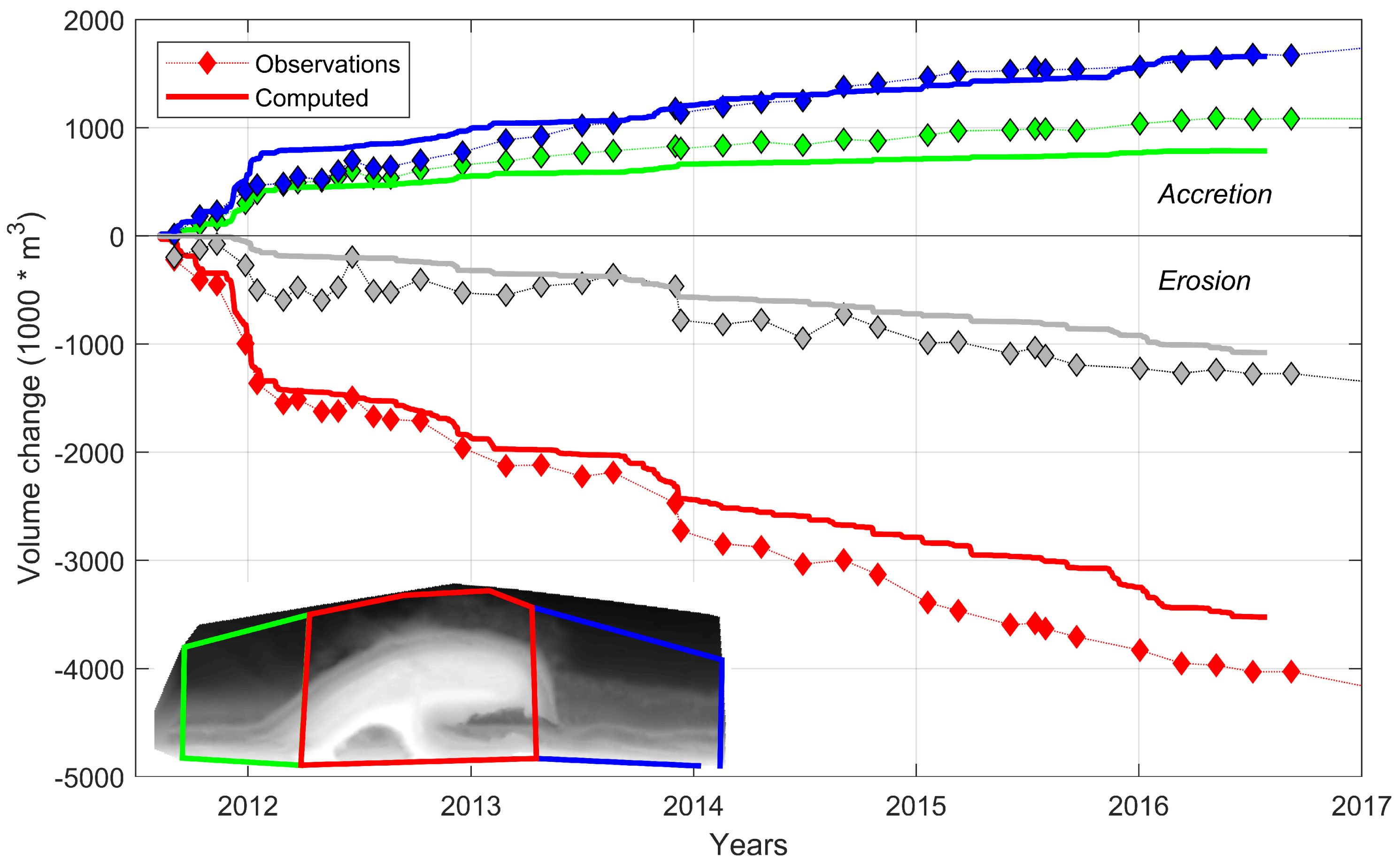
3.3.2. Volume Changes 2011–2016
4. Application of Acceleration Techniques to the Sand Engine Case
4.1. Methodology for Brute Force Methods
4.2. Methodology for Representative Wave Forcing Techniques
4.2.1. Techniques Based on longshore transports
4.2.2. Technique Based on Offshore Wave Climate
5. Verification of Acceleration Techniques for Short to Medium Term Morphodynamic Evolution
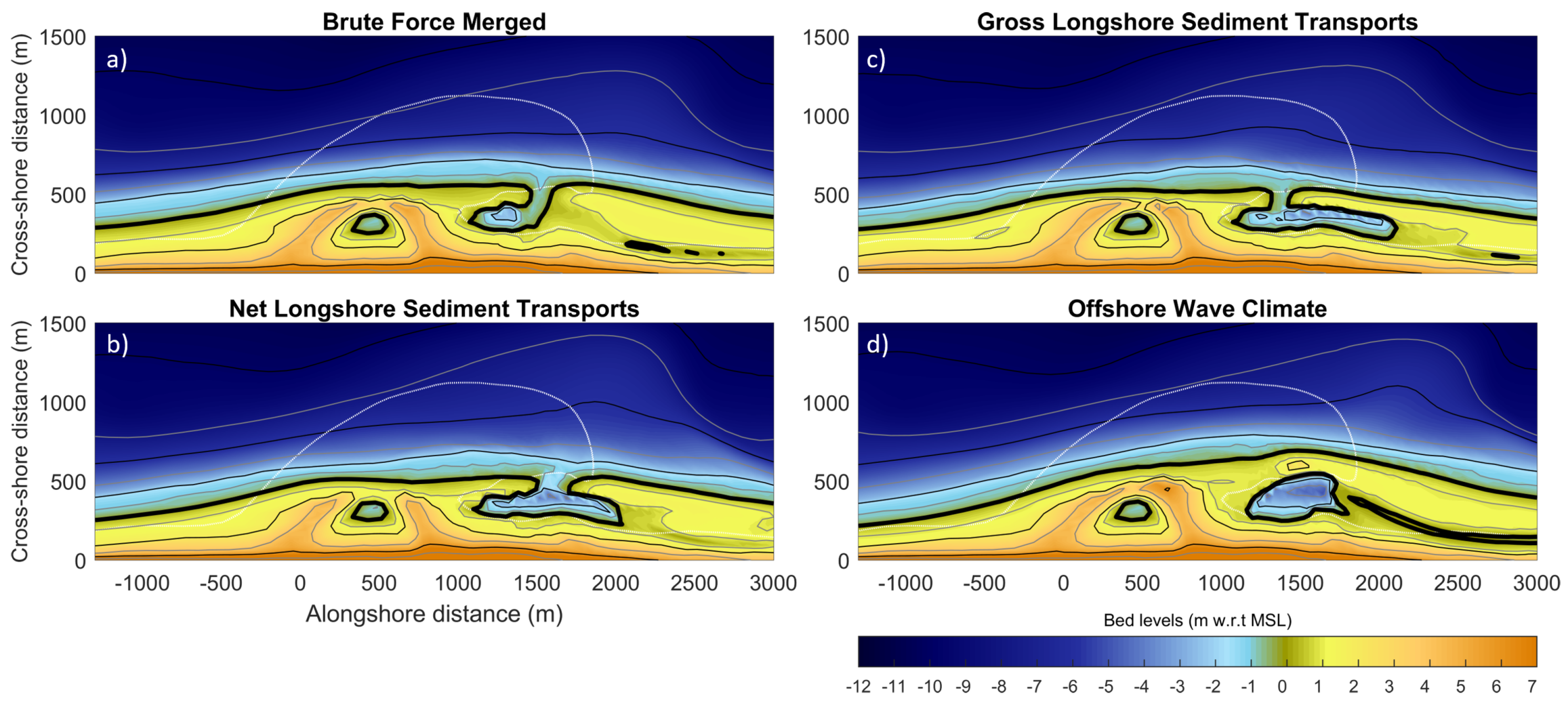
5.1. Morphological Response
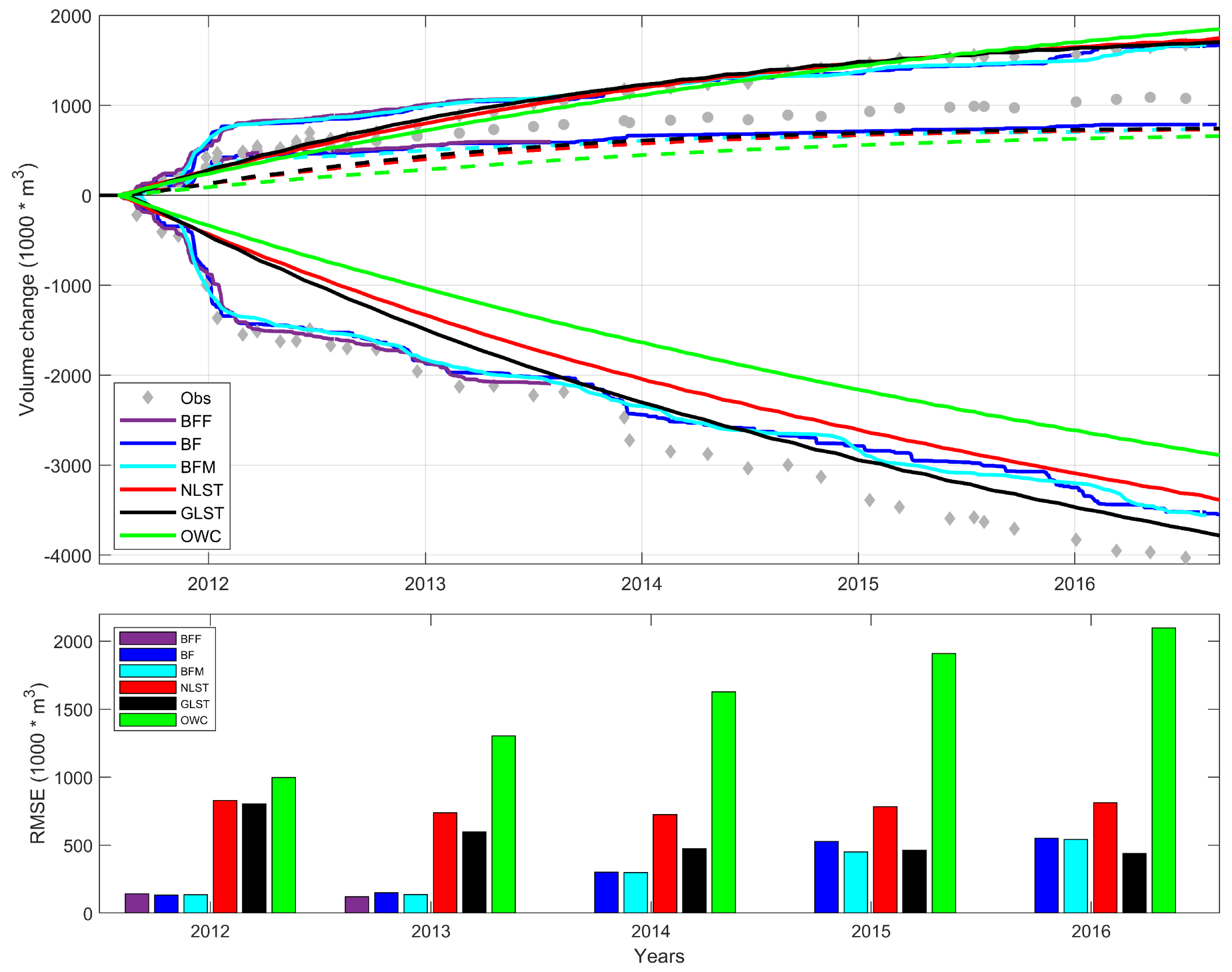
5.2. Volume Changes 2011–2016
5.3. Computational Times
6. Comparison Acceleration Techniques for Decadal Forecasts
6.1. Decadal Scale Evolution
6.2. Volume Changes 2011–2040
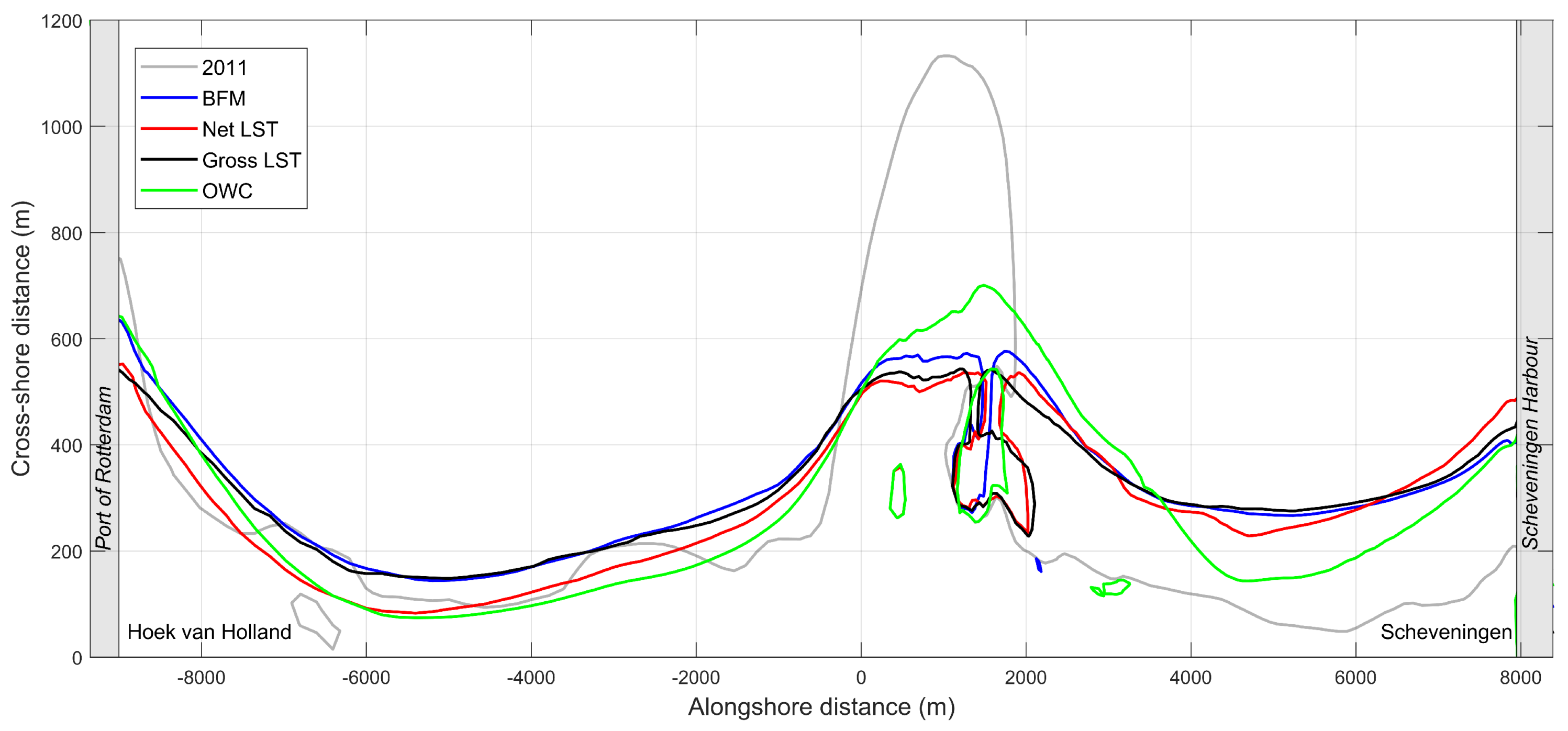
6.3. Shoreline Positions in 2040
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Luijendijk, A.; Hagenaars, G.; Ranasinghe, R.; Baart, F.; Donchyts, G.; Aarninkhof, S. The State of the World’s Beaches. Sci. Rep. 2018, 8, 2045–2322. [Google Scholar] [CrossRef] [PubMed]
- Karunarathna, H.; Brown, J.; Chatzirodou, A.; Dissanayake, P.; Wisse, P. Multi-timescale morphological modelling of a dune-fronted sandy beach. Coast. Eng. 2018, 136, 161–171. [Google Scholar] [CrossRef]
- Splinter, K.D.; Carley, J.T.; Golshani, A.; Tomlinson, R. A relationship to describe the cumulative impact of storm clusters on beach erosion. Coast. Eng. 2014, 83, 49–55. [Google Scholar] [CrossRef]
- Dissanayake, P.; Brown, J.; Wisse, P.; Karunarathna, H. Comparison of storm cluster vs. isolated event impacts on beach/dune morphodynamics. Estuar. Coast. Shelf Sci. 2015, 164, 301–312. [Google Scholar] [CrossRef]
- Pelnard-Considère, R. Essai de théorie de l’évolution des formes de rivage en plages de sable et de galets. In 4th Journées de l’Hydraulique, Les Énergies de la Mer, Question III; Rapport No. 1; Société Hydrotechnique de: Paris, France, 1956; pp. 74-1–74-10. [Google Scholar]
- Larson, M.; Hanson, H.; Kraus, N.C. Analytical Solutions of One-Line Model for Shoreline Change near Coastal Structures. J. Waterw. Port, Coast. Ocean Eng. 1997, 123, 180–191. [Google Scholar] [CrossRef]
- Komar, P.D. Selective grain entrainment by a current from a bed of mixed sizes: A reanalysis. J. Sediment. Petrol. 1987, 57, 203–211. [Google Scholar]
- Arriaga, J.; Rutten, J.; Ribas, F.; Falqués, A.; Ruessink, G. Modeling the long-term diffusion and feeding capability of a mega-nourishment. Coast. Eng. 2017, 121, 1–13. [Google Scholar] [CrossRef]
- Brown, J.M.; Phelps, J.J.; Barkwith, A.; Hurst, M.D.; Ellis, M.A.; Plater, A.J. The effectiveness of beach mega-nourishment, assessed over three management epochs. J. Environ. Manag. 2016, 184, 400–408. [Google Scholar] [CrossRef]
- Roelvink, J.A. Coastal morphodynamic evolution techniques. Coast. Eng. 2006, 53, 277–287. [Google Scholar] [CrossRef]
- Hopkins, J.; Elgar, S.; Raubenheimer, B. Storm Impact on Morphological Evolution of a Sandy Inlet. J. Geophys. Res. Oceans 2018, 123, 5751–5762. [Google Scholar] [CrossRef]
- Elias, E. Morphodynamics of Texel Inlet. Ph.D. Thesis, Delft University of Technology, Faculty of Civil Engineering and Geosciences, Delft, The Netherlands, 2006. [Google Scholar]
- Lesser, G. An Approach to Medium-Term Coastal Morphological Modelling. Ph.D. Thesis, IHE Delft and Delft University of Technology, Delft, The Netherlands, 2009. [Google Scholar]
- Miller, J.K.; Sun, T.; Li, H.; Stewart, J.; Genty, C.; Li, D.; Lyttle, C. Direct Modeling of Reservoirs through Forward Process-based Models: Can We Get There? In Proceedings of the International Petroleum Technology Conference, Kuala Lumpur, Malaysia, 3–5 December, 2008. [Google Scholar]
- Walstra, D.J.; Hoekstra, R.; Tonnon, P.; Ruessink, G. Input reduction for long-term morphodynamic simulations in wave-dominated coastal settings. Coast. Eng. 2013, 77, 57–70. [Google Scholar] [CrossRef]
- Vitousek, S.; Barnard, P.L.; Limber, P.; Erikson, L.; Cole, B. A model integrating longshore and cross-shore processes for predicting long-term shoreline response to climate change. J. Geophys. Res. Earth Surf. 2017, 122, 782–806. [Google Scholar] [CrossRef]
- Carraro, F.; Vanzo, D.; Caleffi, V.; Valiani, A.; Siviglia, A. Mathematical study of linear morphodynamic acceleration and derivation of the MASSPEED approach. Adv. Water Resour. 2018, 117. [Google Scholar] [CrossRef]
- Li, L.; Storms, J.; Walstra, D. On the upscaling of process-based models in deltaic applications. Geomorphology 2018, 304, 201–213. [Google Scholar] [CrossRef]
- Ranasinghe, R.; Swinkels, C.M.; Luijendijk, A.P.; Roelvink, J.A.; Bosboom, J.; Stive, M.J.F.; Walstra, D.J.R. Morphodynamic upscaling with the MORFAC approach: Dependencies and sensitivities. Coast. Eng. 2011, 58, 806–811. [Google Scholar] [CrossRef]
- Lesser, G.R.; Roelvink, J.A.; van Kester, J.A.T.M.; Stelling, G.S. Development and validation of a three-dimensional morphological model. Coast. Eng. 2004, 51, 883–915. [Google Scholar] [CrossRef]
- Van der Wegen, M.; Roelvink, J.A. Long-term morphodynamic evolution of a tidal embayment using a twodimensional, process-based model. J. Geophys. Res. 2008, 113, 1–23. [Google Scholar] [CrossRef]
- Geleynse, N.; Storms, J.E.A.; Walstra, D.J.R.; Jagers H R A Wang, Z.B.; Stive, M.J.F. Controls on river delta formation; insights from numerical modelling. Earth Planet. Sci. Lett. 2011, 302, 217–226. [Google Scholar] [CrossRef]
- Nahon, A.; Bertin, X.; Fortunato, A.; Oliveira, A. Process-based 2DH morphodynamic modeling of tidal inlets: A comparison with empirical classifications and theories. Mar. Geol. 2012, 291–294, 1–11. [Google Scholar] [CrossRef]
- Tran-Thanh, T.; Van De Kreeke, J.; Stive, M.; Walstra, D.J. Cross-sectional stability of tidal inlets: A comparison between numerical and empirical approaches. Coast. Eng. 2011, 60, 21–29. [Google Scholar] [CrossRef]
- Van der Vegt, H.; Storms, J.; Walstra, D.; Howes, N. Can bed load transport drive varying depositional behaviour in river delta environments? Sediment. Geol. 2016, 345, 19–32. [Google Scholar] [CrossRef]
- Luijendijk, A.P.; Ranasinghe, R.; de Schipper, M.A.; Huisman, B.A.; Swinkels, C.M.; Walstra, D.J.; Stive, M.J. The initial morphological response of the Sand Engine: A process-based modelling study. Coast. Eng. 2017, 119, 1–14. [Google Scholar] [CrossRef]
- Grunnet, N.M.; Ruessink, B.G. Morphodynamic response of nearshore bars to a shoreface nourishment. Coast. Eng. 2005, 52, 119–137. [Google Scholar] [CrossRef]
- Benedet, L.; Dobrochinski, J.; Walstra, D.; Klein, A.; Ranasinghe, R. A morphological modeling study to compare different methods of wave climate schematization and evaluate strategies to reduce erosion losses from a beach nourishment project. Coast. Eng. 2016, 112, 69–86. [Google Scholar] [CrossRef]
- Tonnon, P.K.; van der Werf, J.; Mulder, J.P.M. Morphological Calculations for the EIA of the Sand Engine; Technical Report; Deltares: Delft, The Netherlands, 2009. [Google Scholar]
- Dhastgheib, A. Long-Term Process-Based Morphological Modelling of Large Tidal Basins. Ph.D. Thesis, IHE Delft, Delft, The Netherlands, 2012. [Google Scholar]
- Mol, A.C.S. Schematization of Boundary Conditions for Morphological Simulations; Technical Report; WL|Delft Hydraulics: Delft, The Netherlands, 2007. [Google Scholar]
- Van den Berg, N.; Falqués, A.; Ribas, F. Modeling large scale shoreline sand waves under oblique wave incidence. J. Geophys. Res. Earth Surf. 2012, 117. [Google Scholar] [CrossRef]
- Stive, M.J.F.; De Schipper, M.A.; Luijendijk, A.P.; Aarninkhof, S.G.J.; Van Gelder-Maas, C.; Van Thiel de Vries, J.S.M.; De Vries, S.; Henriquez, M.; Marx, S.; Ranasinghe, R. A New Alternative to Saving Our Beaches from Sea-Level Rise: The Sand Engine. J. Coast. Res. 2013, 29, 1001–1008. [Google Scholar] [CrossRef]
- De Schipper, M.A.; de Vries, S.; Ruessink, B.G.; de Zeeuw, R.C.; Rutten, J.; van Gelder-Maas, C.; Stive, M.J.F. Initial spreading of a mega feeder nourishment: Observations of the Sand Engine pilot project. Coast. Eng. 2016, 111, 23–38. [Google Scholar] [CrossRef]
- Wijnberg, K.M. Environmental controls on decadal morphologic behaviour of the Holland coast. Mar. Geol. 2002, 189, 227–247. [Google Scholar] [CrossRef]
- Luijendijk, A.P.; Huisman, B.; De Schipper, M. Impact of a storm on the first year evolution of the Sand Engine. In Proceedings of the Coastal Sediments, San Diego, CA, USA, 11–15 May 2015. [Google Scholar]
- Zijl, F.; Verlaan, M.; Gerritsen, H. Improved water-level forecasting for the Northwest European Shelf and North Sea through direct modelling of tide, surge and non-linear interaction. Ocean Dyn. 2013, 63, 823–847. [Google Scholar] [CrossRef]
- Sutherland, J.; Walstra, D.J.R.; Chesher, T.J.; van Rijn, L.C.; Southgate, H.N. Evaluation of coastal area modelling systems at an estuary mouth. Coast. Eng. 2004, 51, 119–142. [Google Scholar] [CrossRef]
- Hoonhout, B.; de Vries, S. Aeolian sediment supply at a mega nourishment. Coast. Eng. 2017, 123, 11–20. [Google Scholar] [CrossRef]
- De Vries, S.; Arens, S.M.; de Schipper, M.A.; Ranasinghe, R. Aeolian sediment transport in supply limited situations Part II; An analysis on field data. Aeolian Res. 2012, 12, 75–85. [Google Scholar] [CrossRef]
- Authority, S.H. Maintenance Dredging Records Scheveningen Harbour 2010–2018; Technical Report; Harbour Authority Scheveningen: The Hague, The Netherlands, 2018. [Google Scholar]
- Roelvink, J.A.; Reniers, A. A Guide to Modeling Coastal Morphology; World Scientific: Singapore, 2012. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Abbr. | Acceleration Technique | Time (h) | Relative to BF (%) |
|---|---|---|---|
| BF | Brute Force | 331.4 | 100.0 |
| BFF | Brute Force Filtered | 176.6 | 53.3 |
| BFFC | Brute Force Filtered Compressed | 56.5 | 17.1 |
| BFM | Brute Force Merged | 15.0 | 4.5 |
| NLST | Net LST | 3.9 | 1.2 |
| GLST | Gross LST | 3.2 | 1.0 |
| OWC | Offshore Wave Climate | 5.3 | 1.6 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luijendijk, A.P.; de Schipper, M.A.; Ranasinghe, R. Morphodynamic Acceleration Techniques for Multi-Timescale Predictions of Complex Sandy Interventions. J. Mar. Sci. Eng. 2019, 7, 78. https://doi.org/10.3390/jmse7030078
Luijendijk AP, de Schipper MA, Ranasinghe R. Morphodynamic Acceleration Techniques for Multi-Timescale Predictions of Complex Sandy Interventions. Journal of Marine Science and Engineering. 2019; 7(3):78. https://doi.org/10.3390/jmse7030078
Chicago/Turabian StyleLuijendijk, Arjen P., Matthieu A. de Schipper, and Roshanka Ranasinghe. 2019. "Morphodynamic Acceleration Techniques for Multi-Timescale Predictions of Complex Sandy Interventions" Journal of Marine Science and Engineering 7, no. 3: 78. https://doi.org/10.3390/jmse7030078
APA StyleLuijendijk, A. P., de Schipper, M. A., & Ranasinghe, R. (2019). Morphodynamic Acceleration Techniques for Multi-Timescale Predictions of Complex Sandy Interventions. Journal of Marine Science and Engineering, 7(3), 78. https://doi.org/10.3390/jmse7030078