Automatic Shoreline Position and Intertidal Foreshore Slope Detection from X-Band Radar Images Using Modified Temporal Waterline Method with Corrected Wave Run-up


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (i)
- to implement an automated mTWM to detect the time series of shoreline positions and intertidal foreshore slopes extracted from time stack X-band radar images considering tidal variations in the abovementioned entirely sandy and highly varied study site;
- (ii)
- to validate the derived temporal updates of shoreline positions and intertidal foreshore slopes at the research pier in comparison to the previously collected survey data;
- (iii)
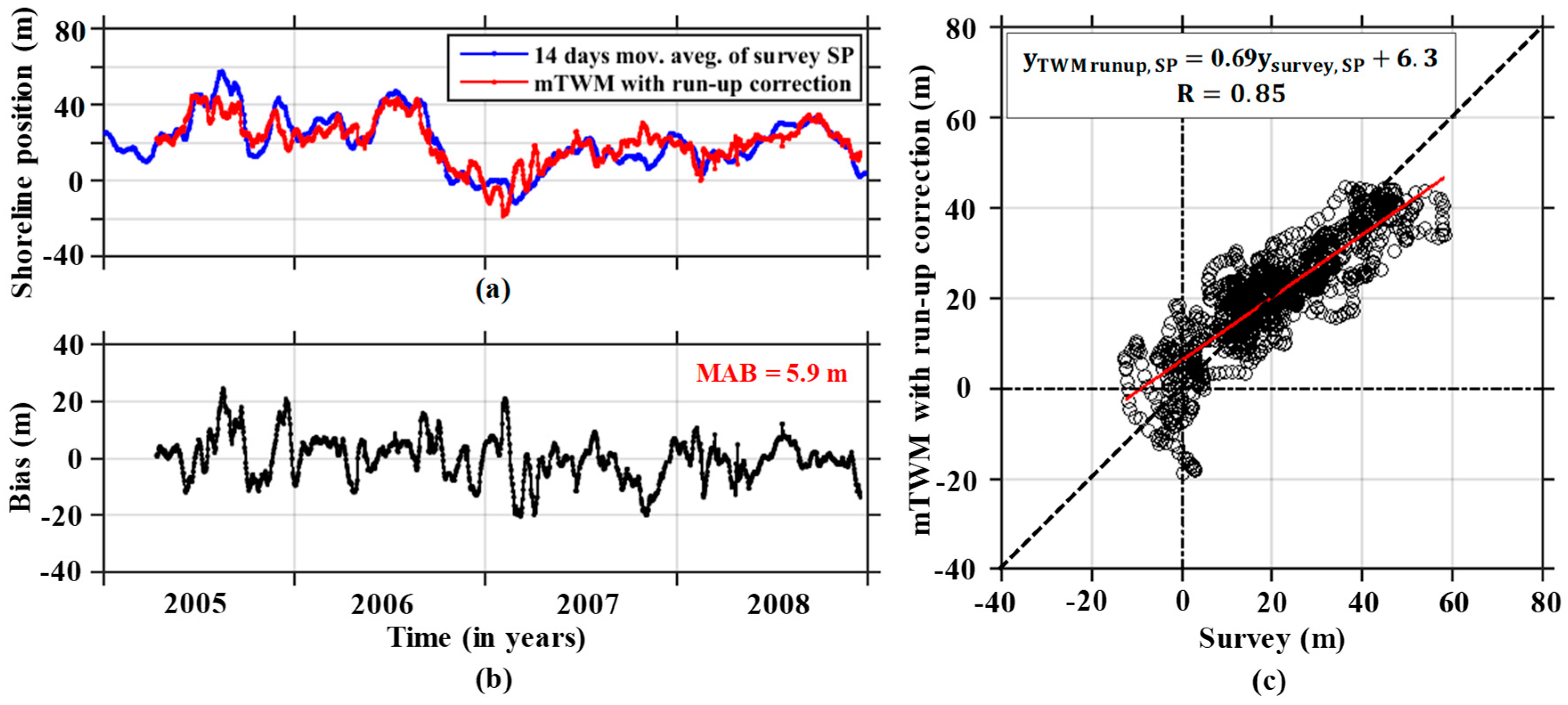
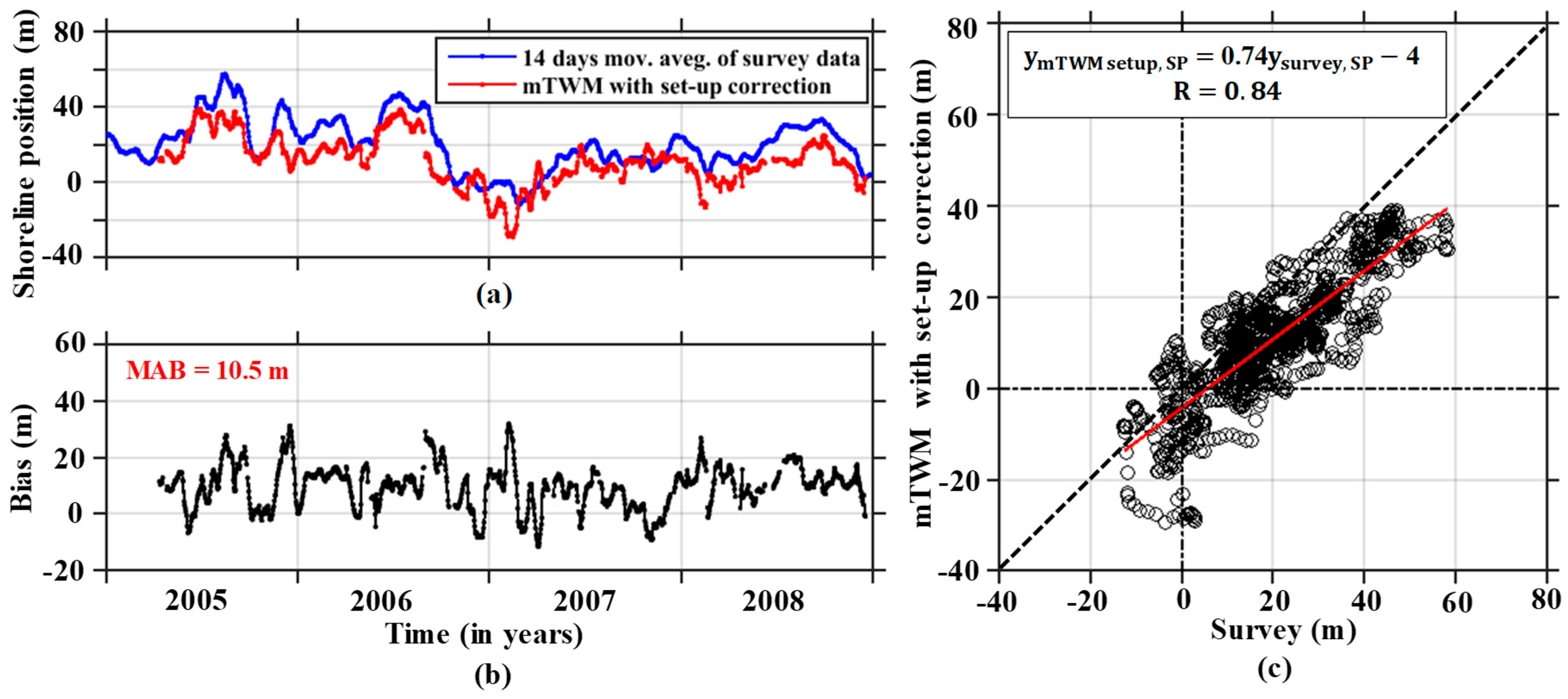
- to compare the temporal updates of the extracted shoreline positions with corrected wave set-up and run-up with survey data.
2. Radar Observation and Data Processing
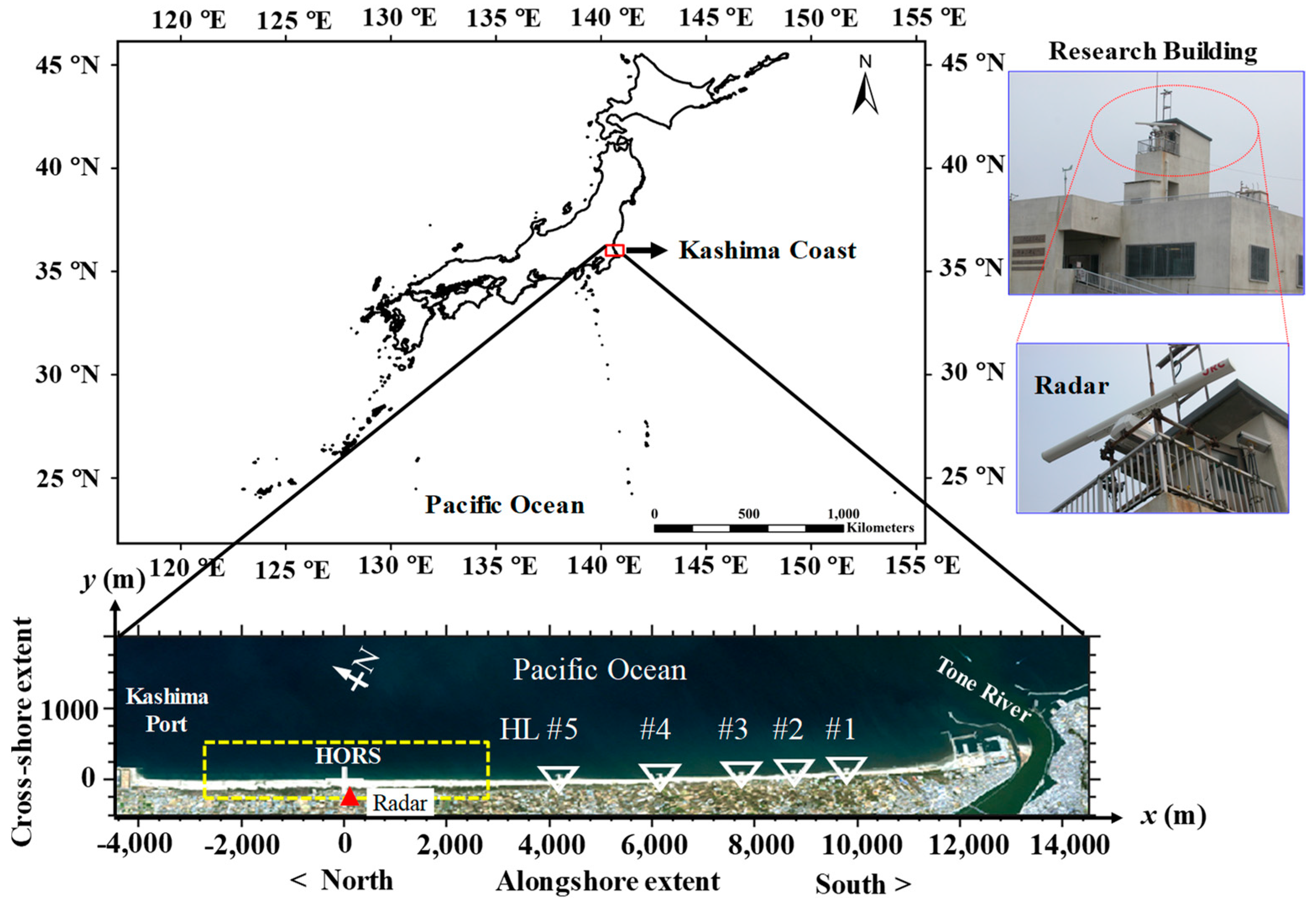
2.1. Study Site
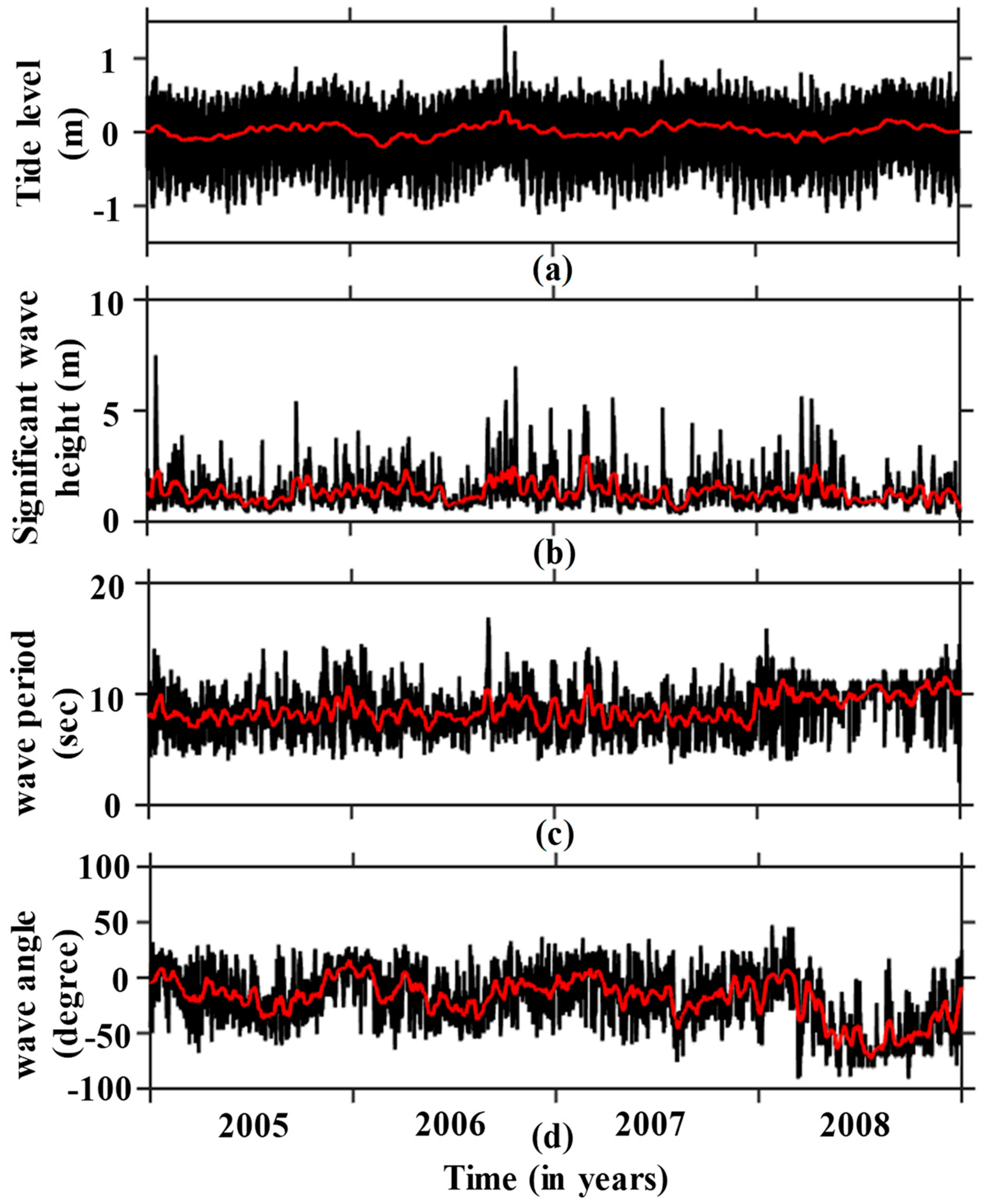
2.2. Tide and Wave Data
2.3. X-Band Radar System and Time-Averaged Images
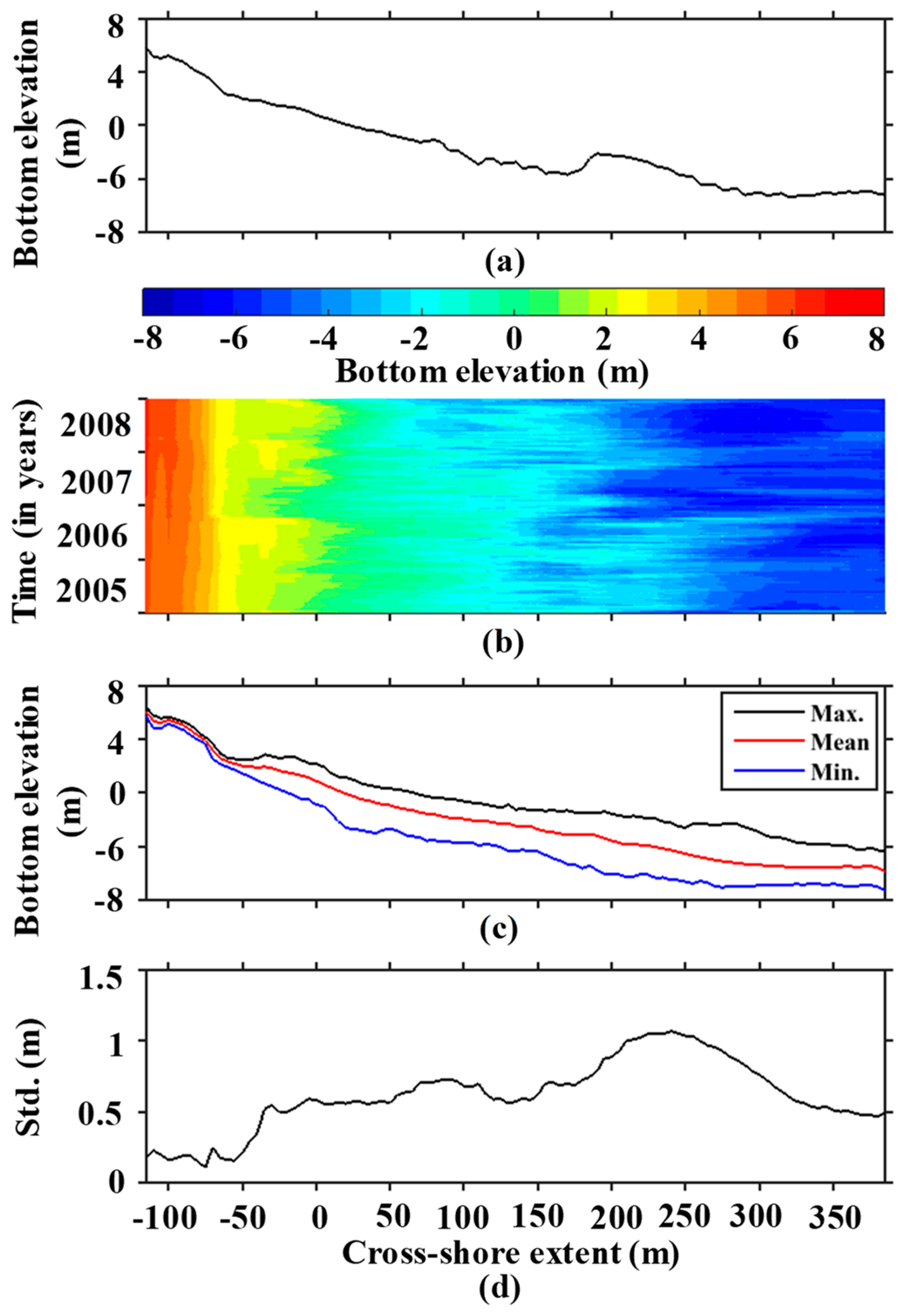
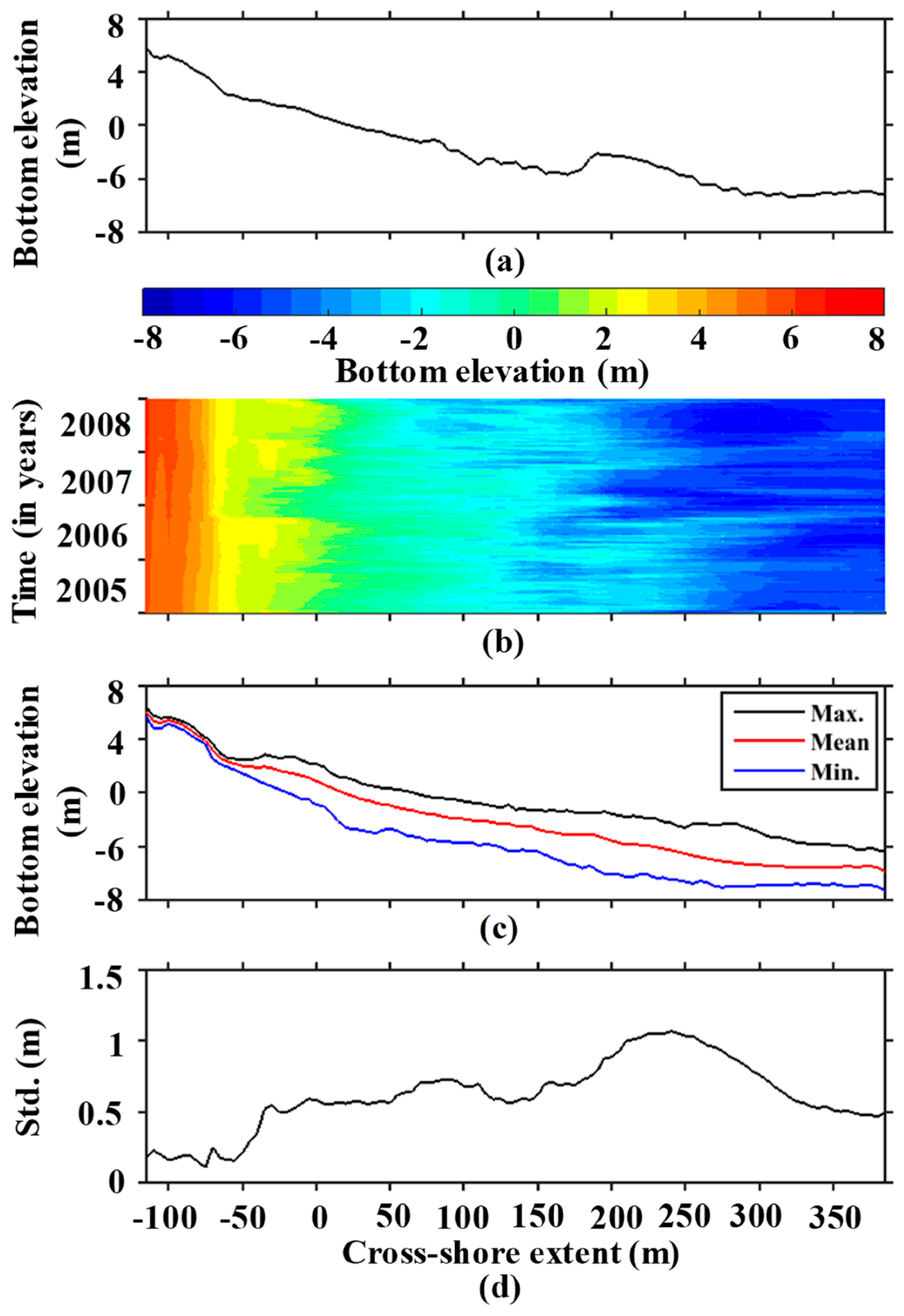
3. Beach Profile along the Pier
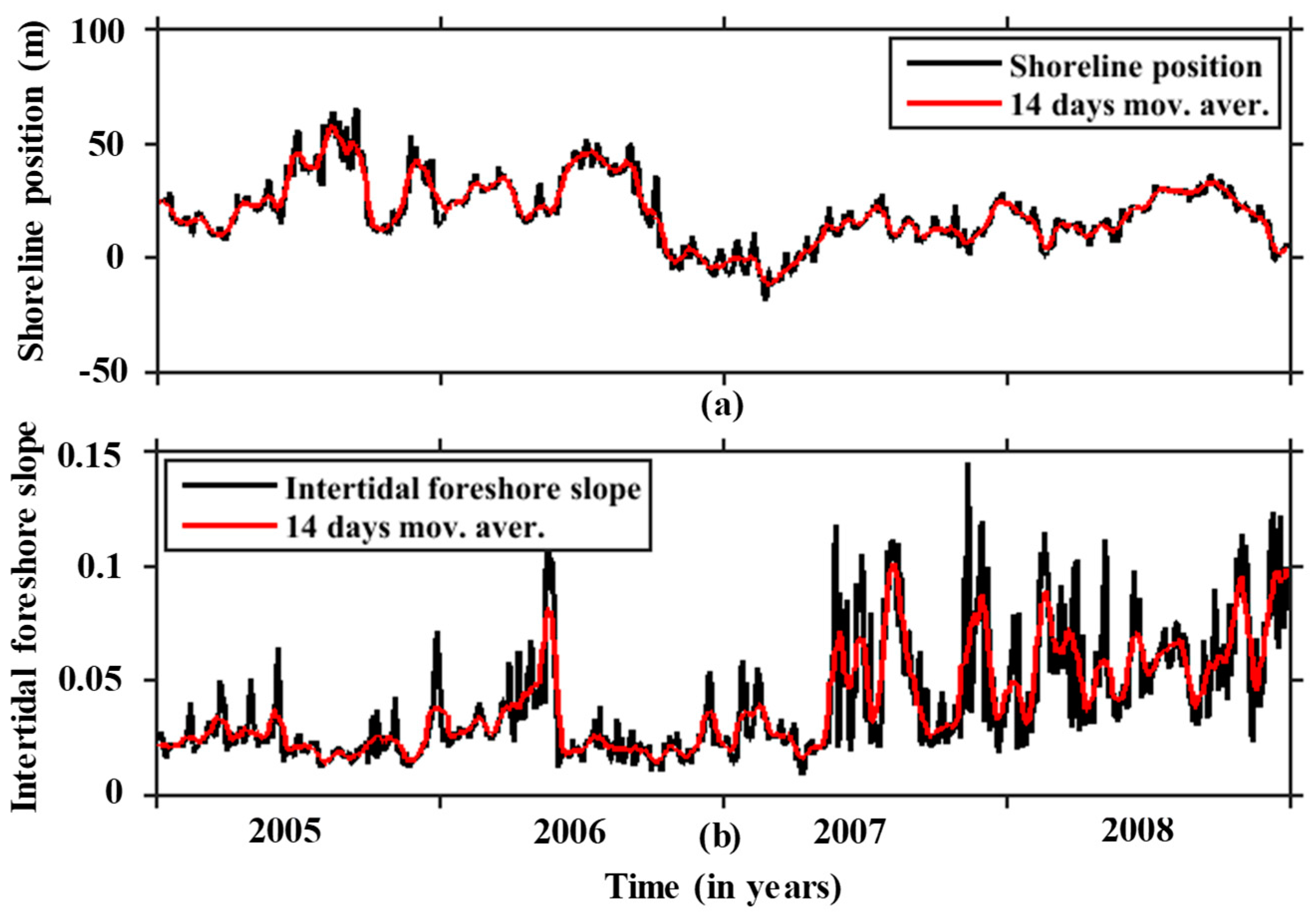
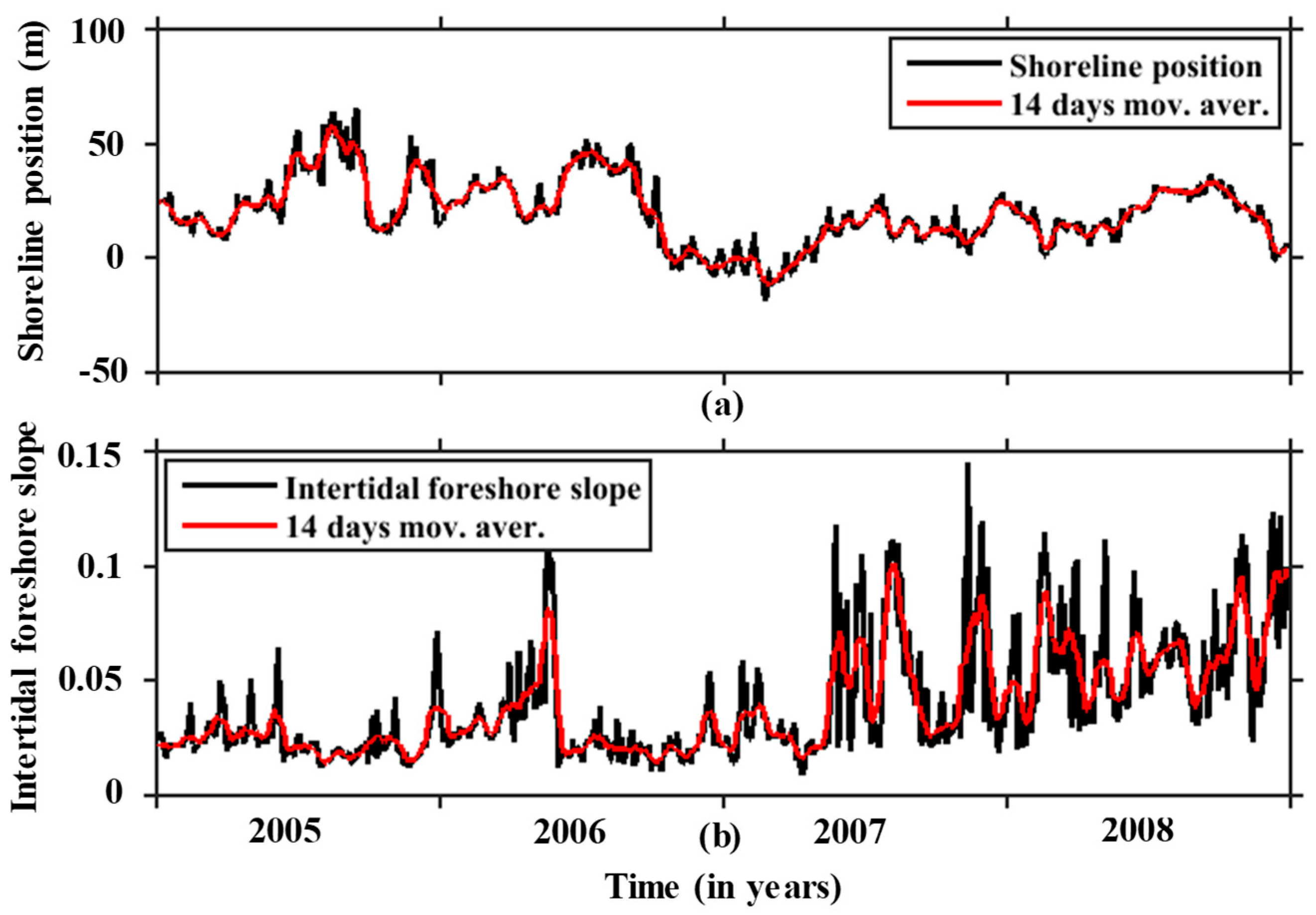
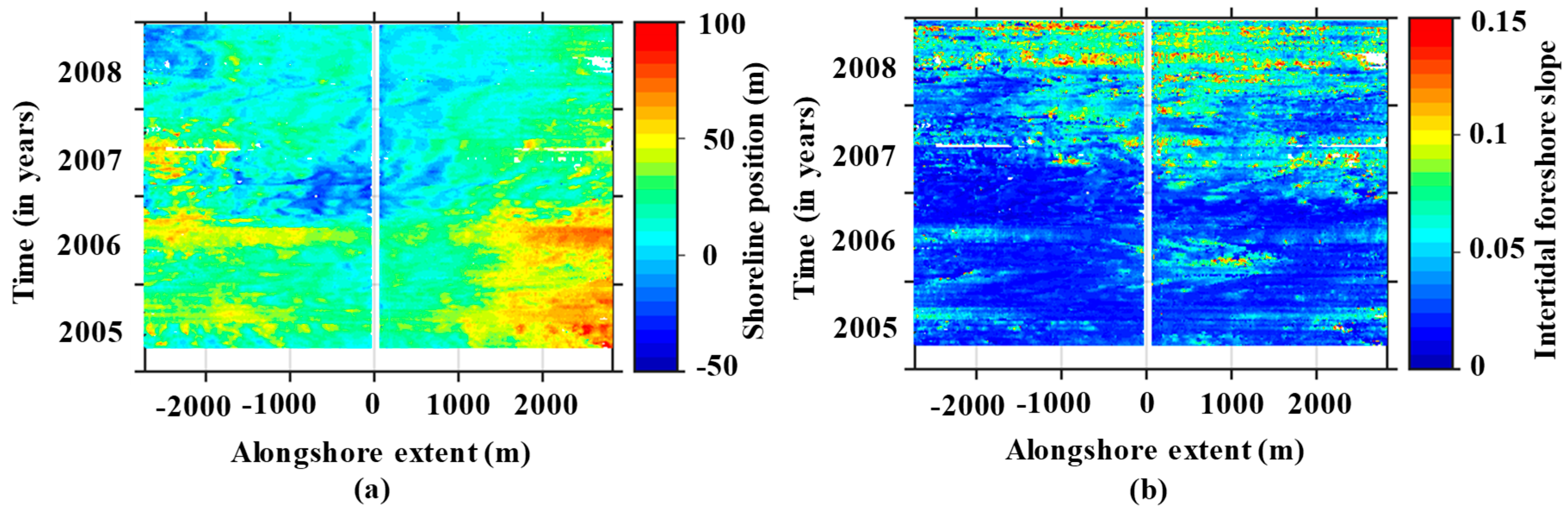
4. Shoreline Position and Intertidal Foreshore Slope Estimation
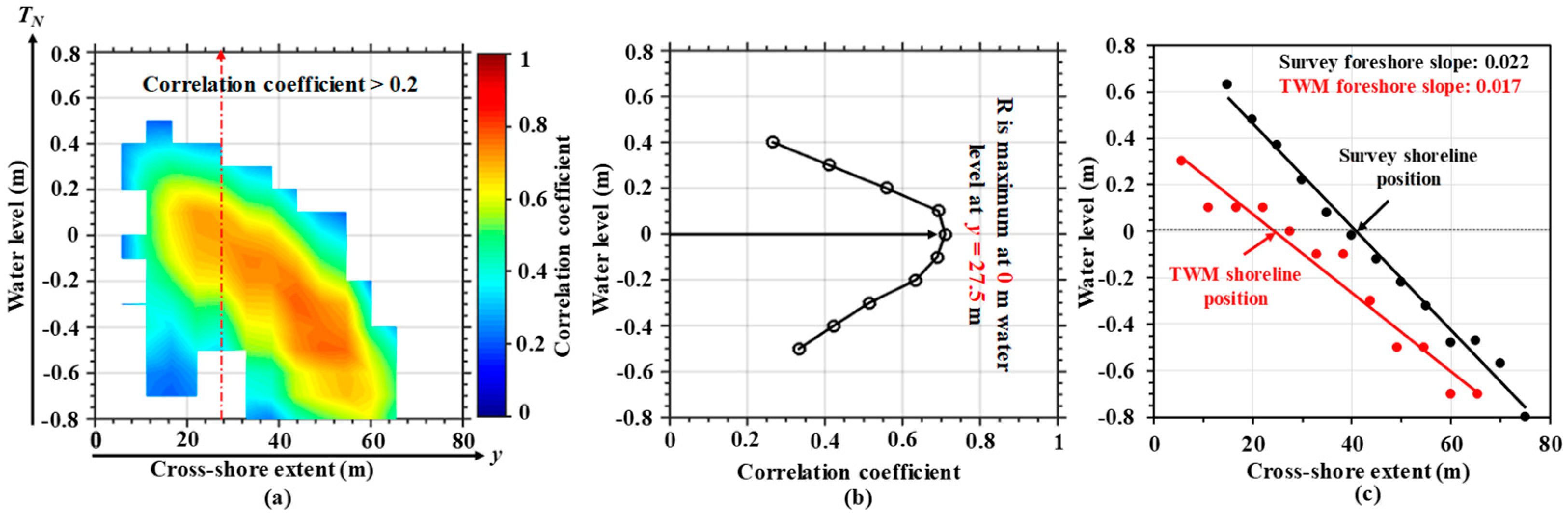
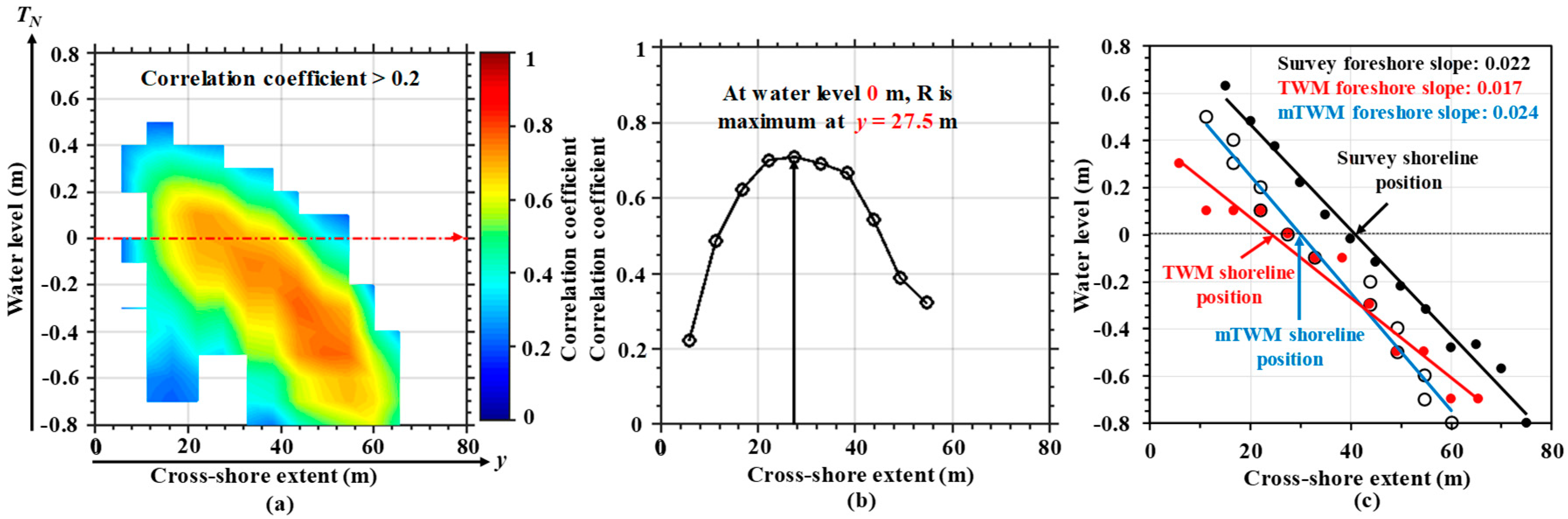
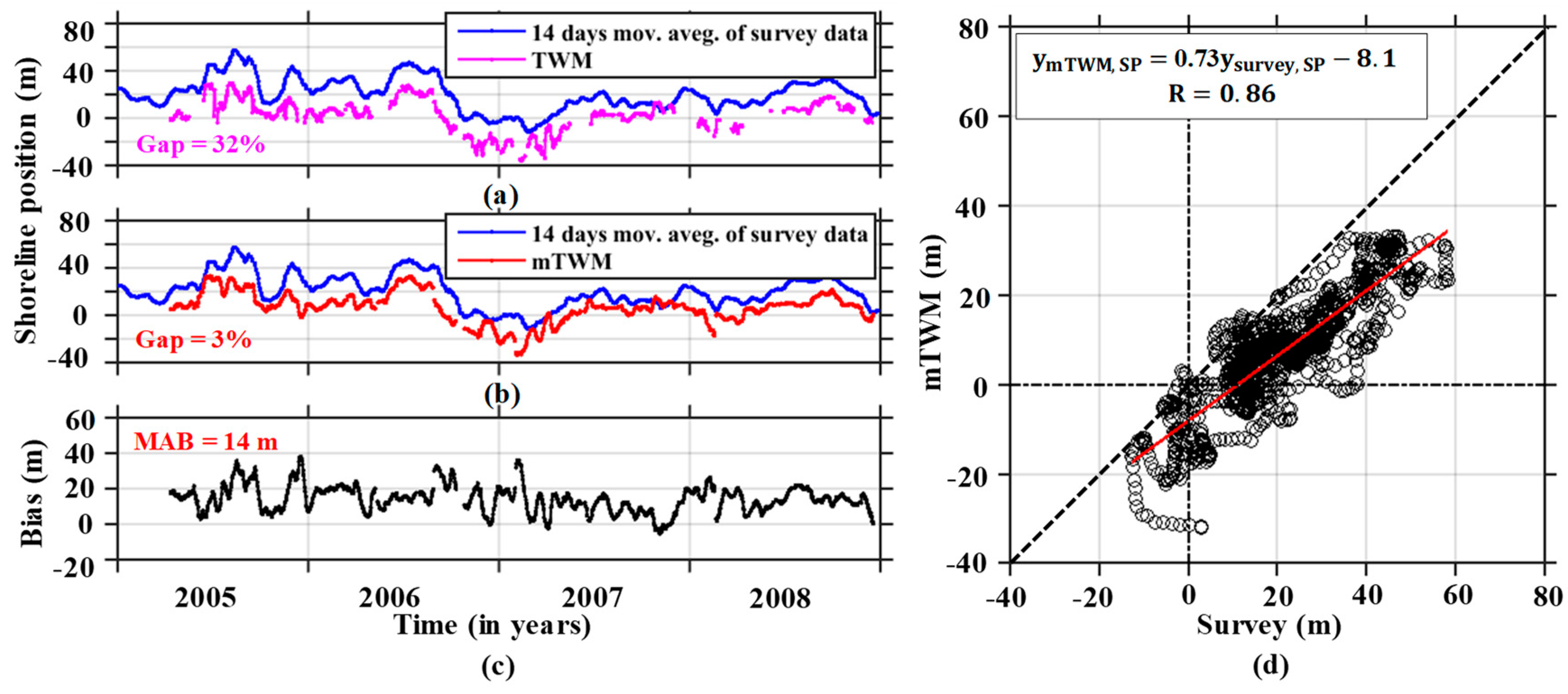
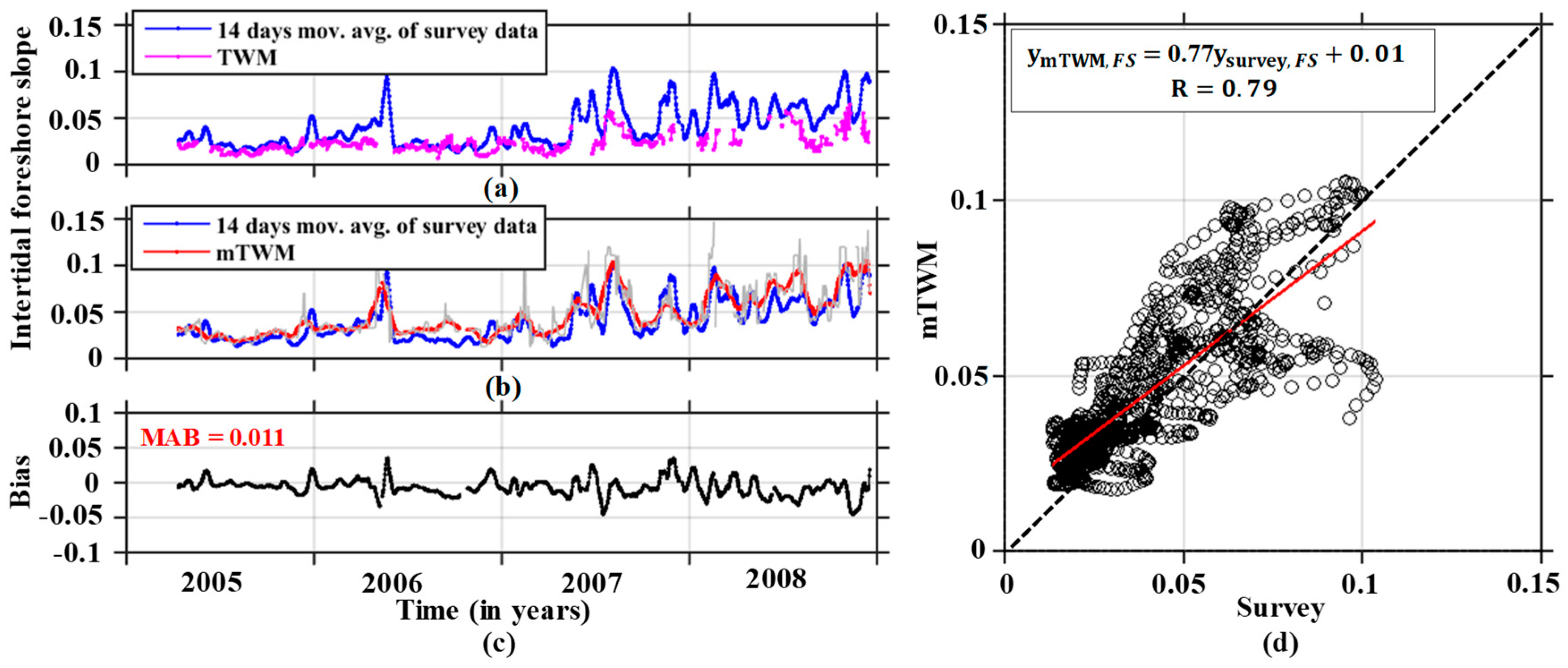
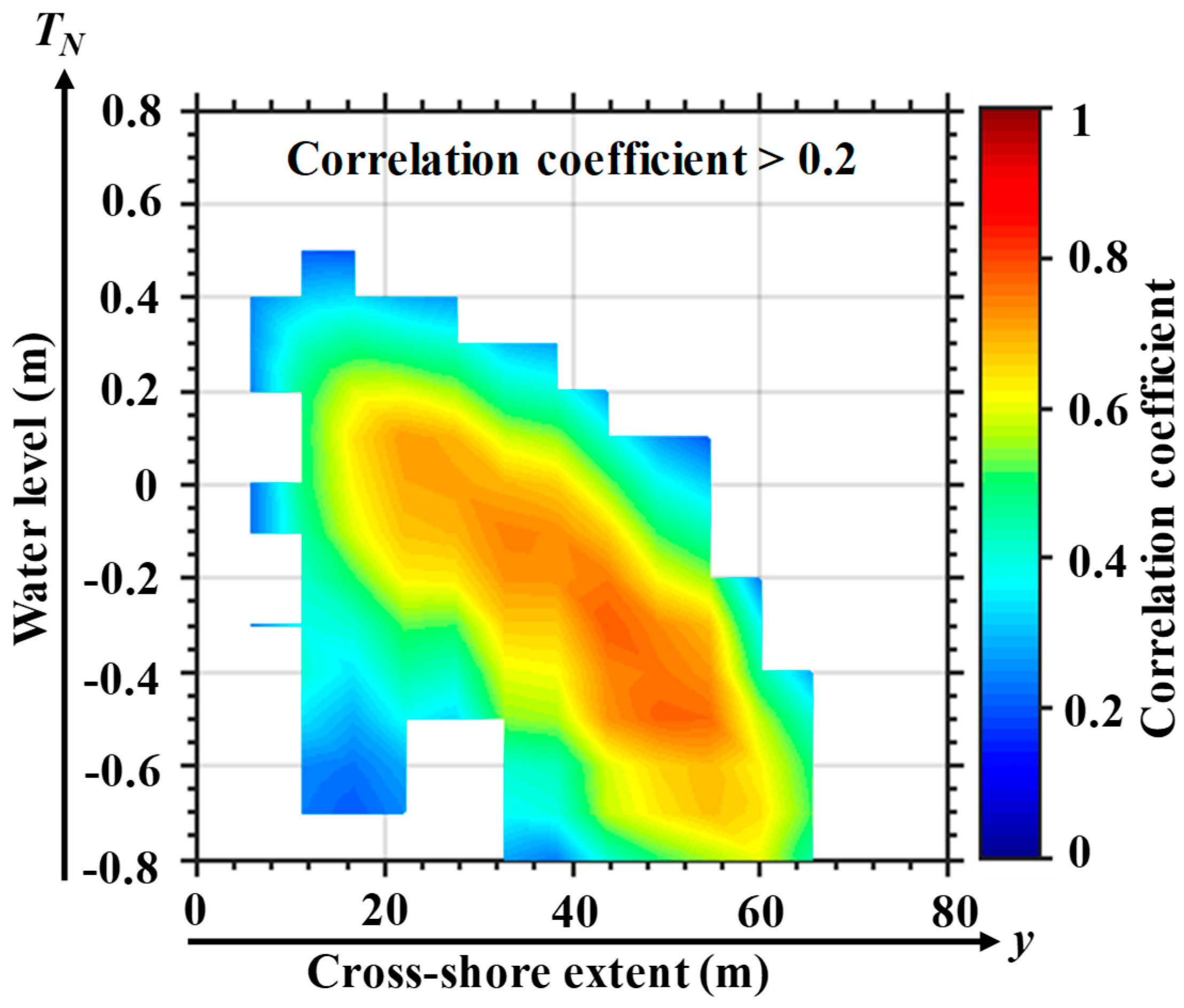
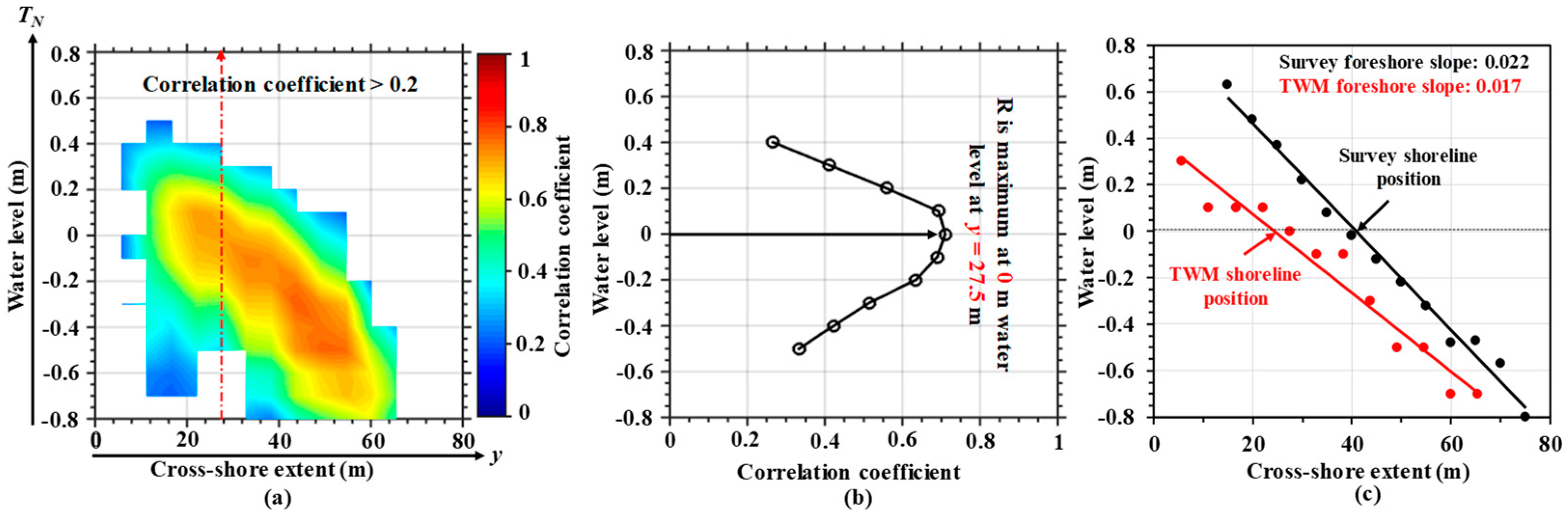
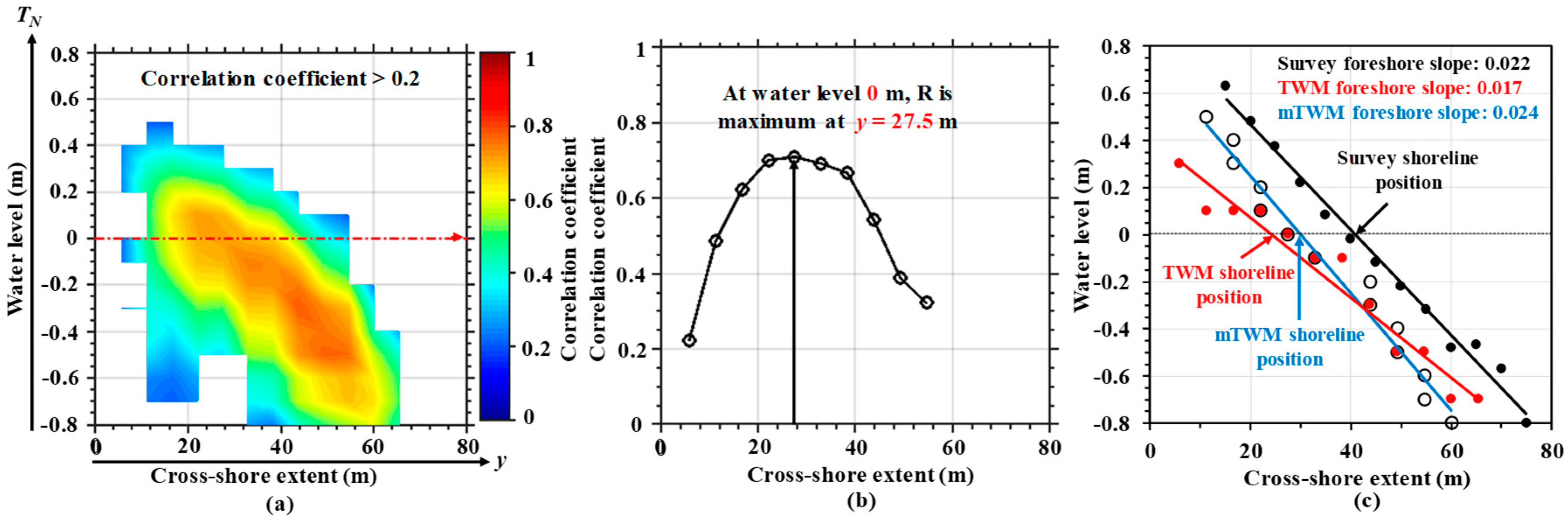
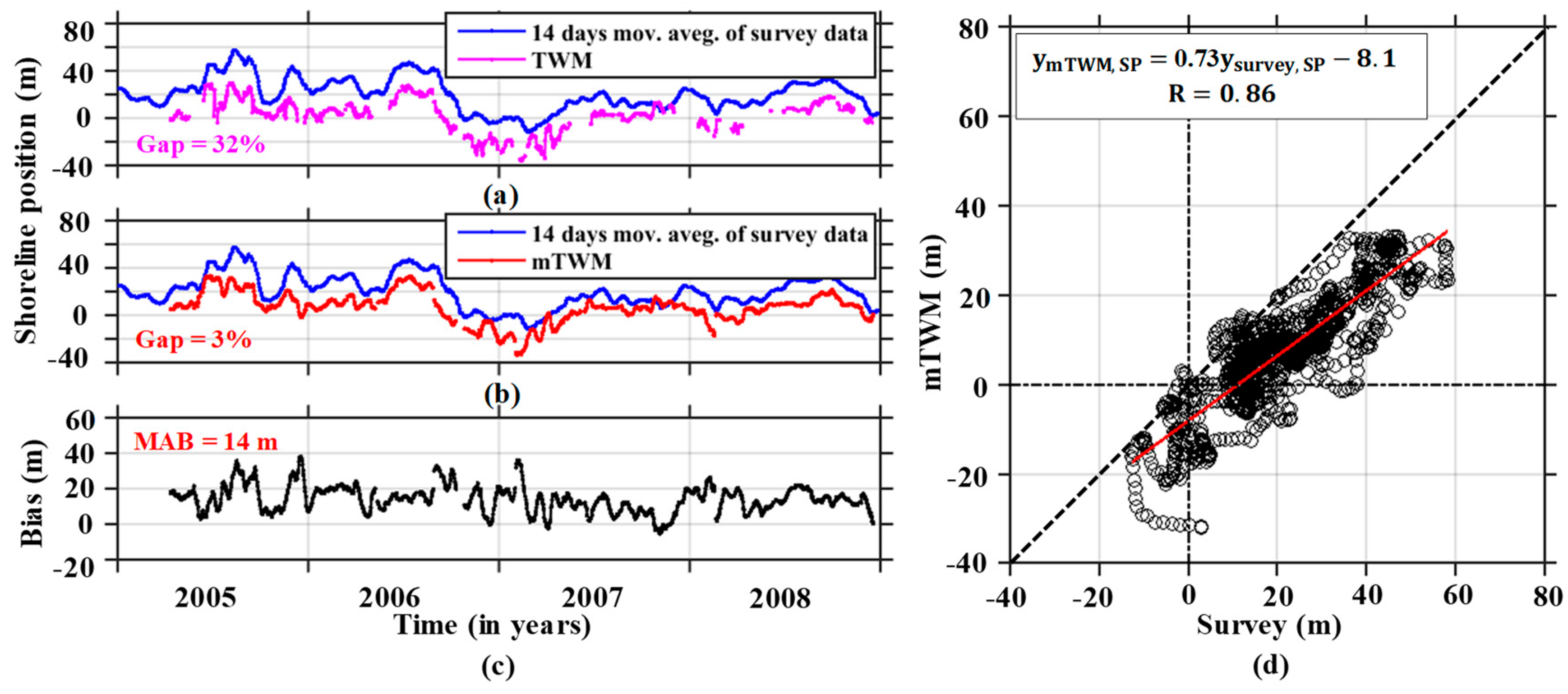
4.1. Intertidal Beach Profile and Shoreline Estimation Using TWM and mTWM
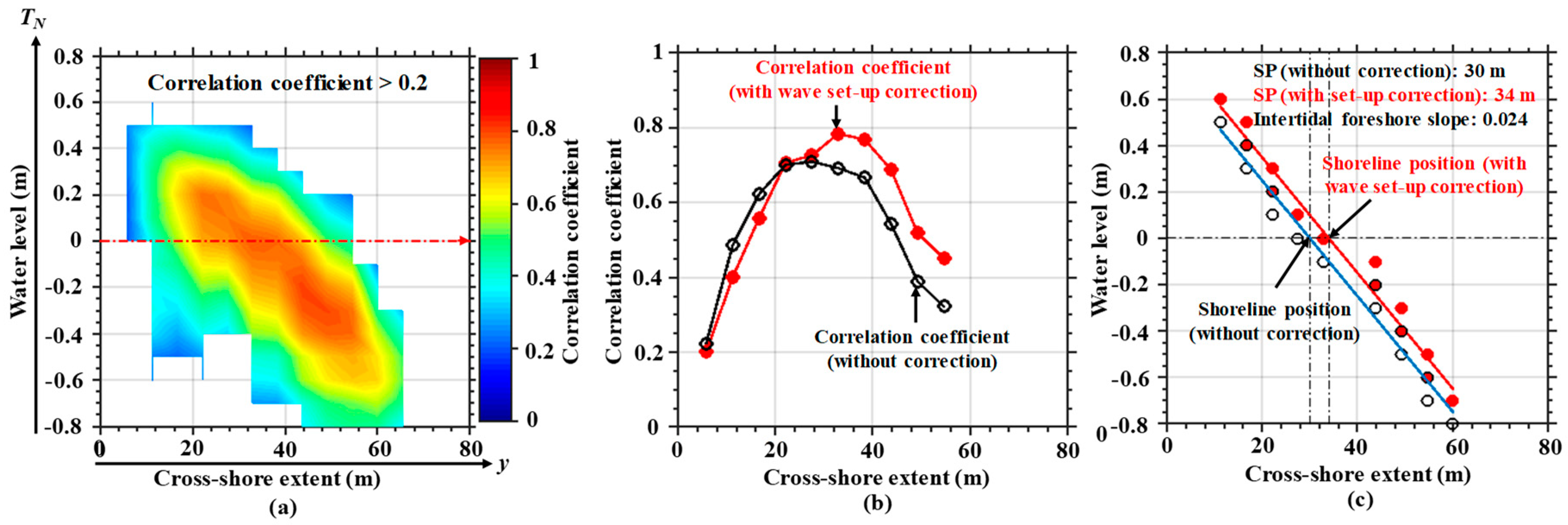
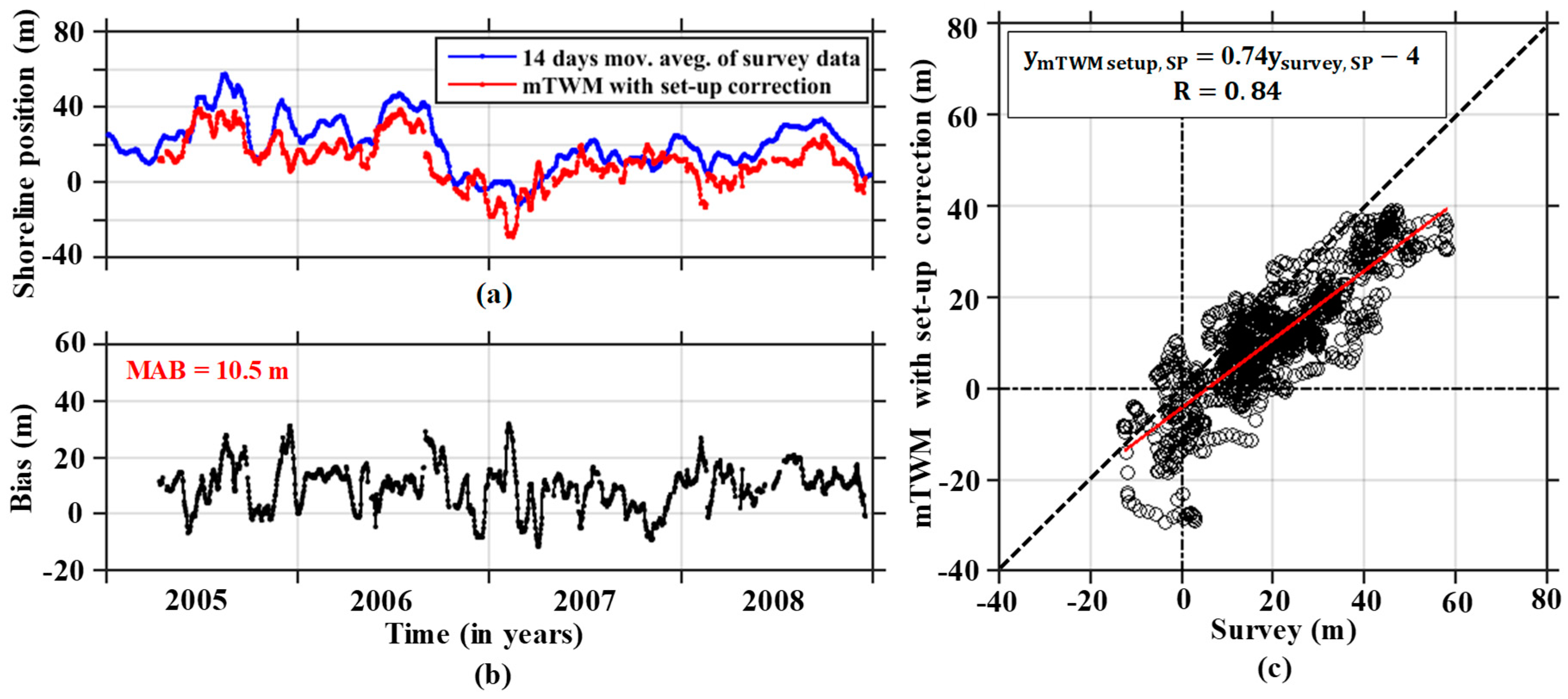
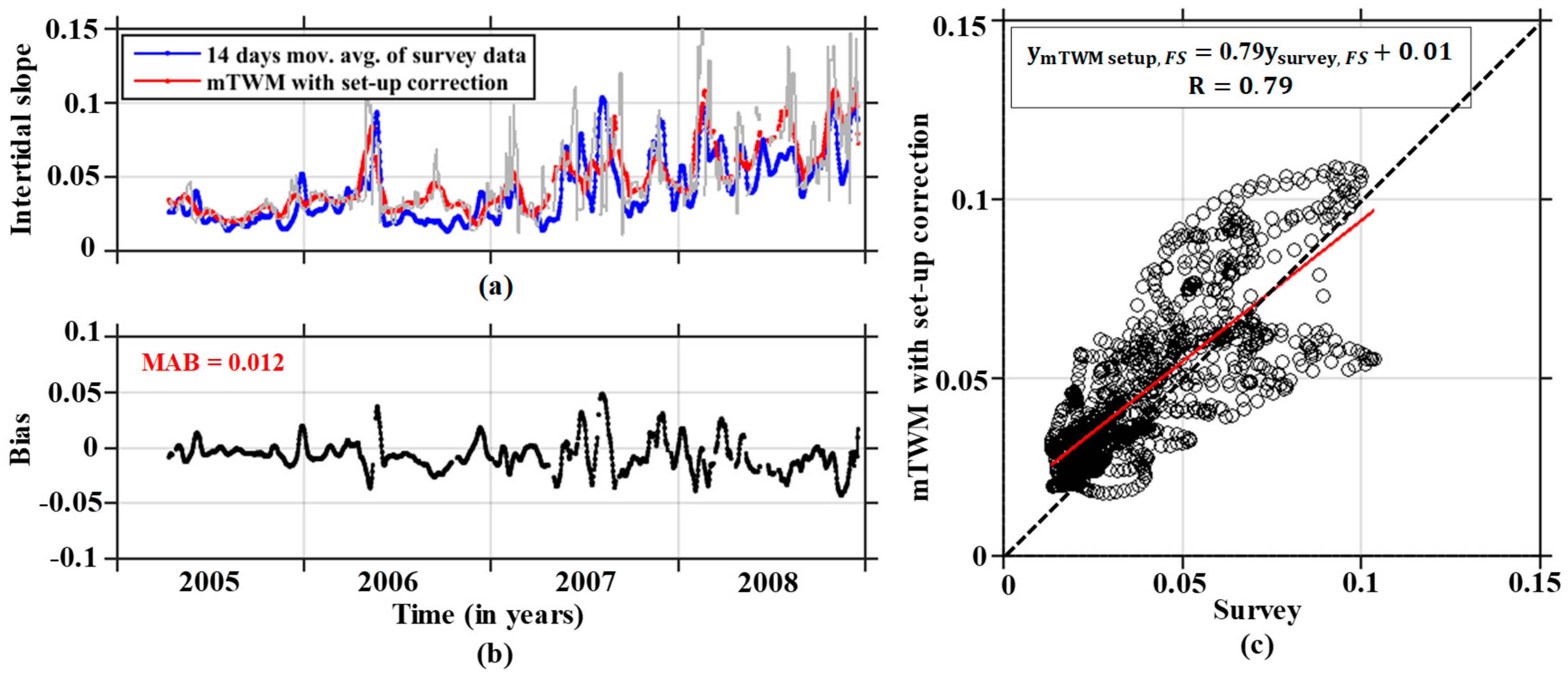
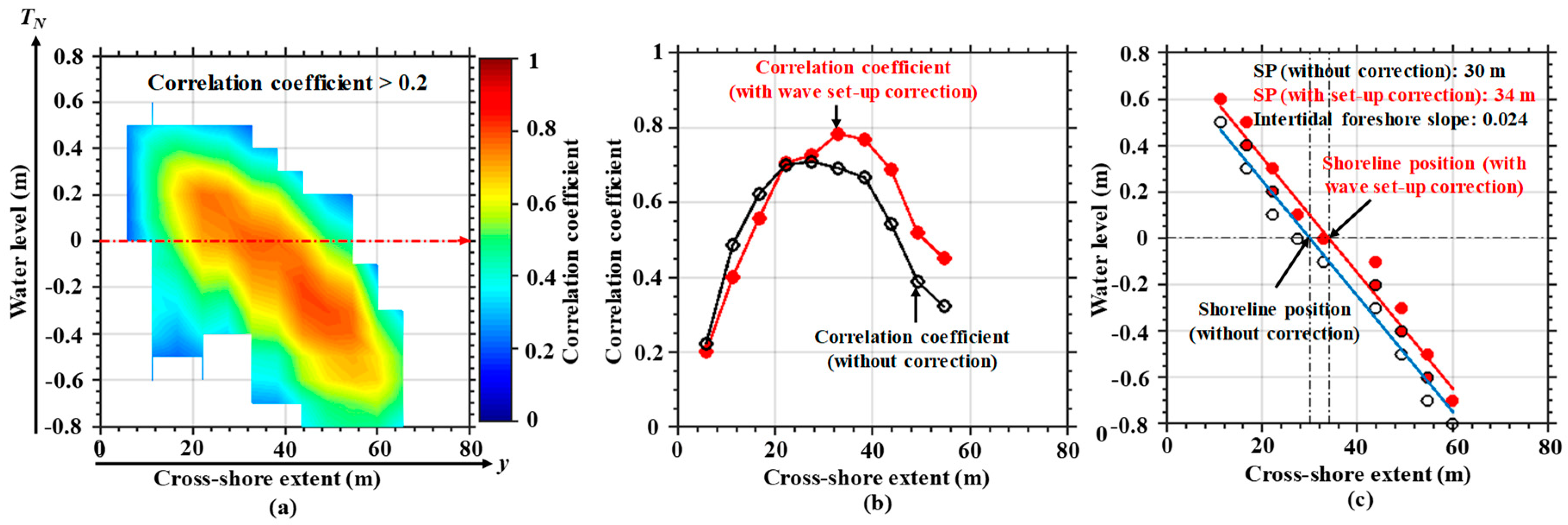
4.2. Wave Set-up Correction
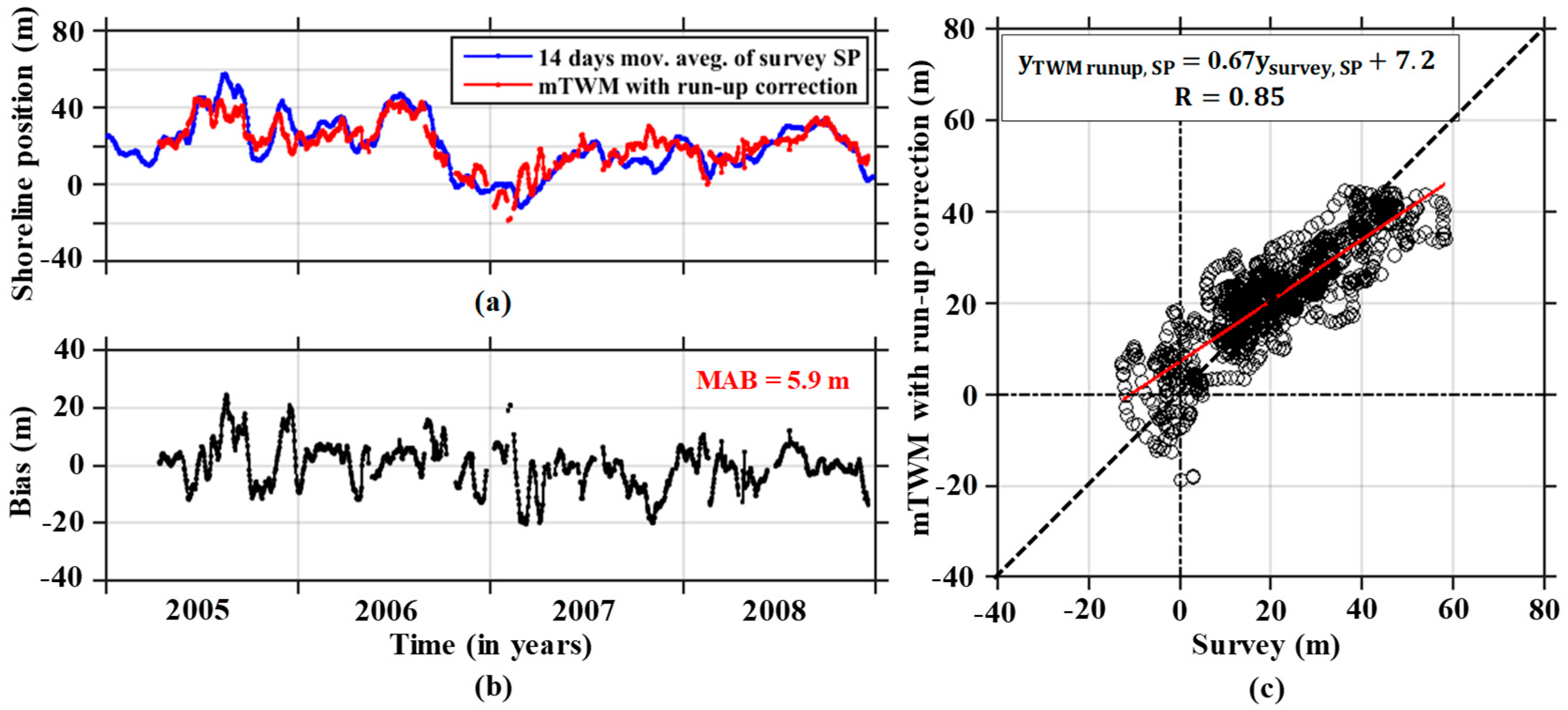
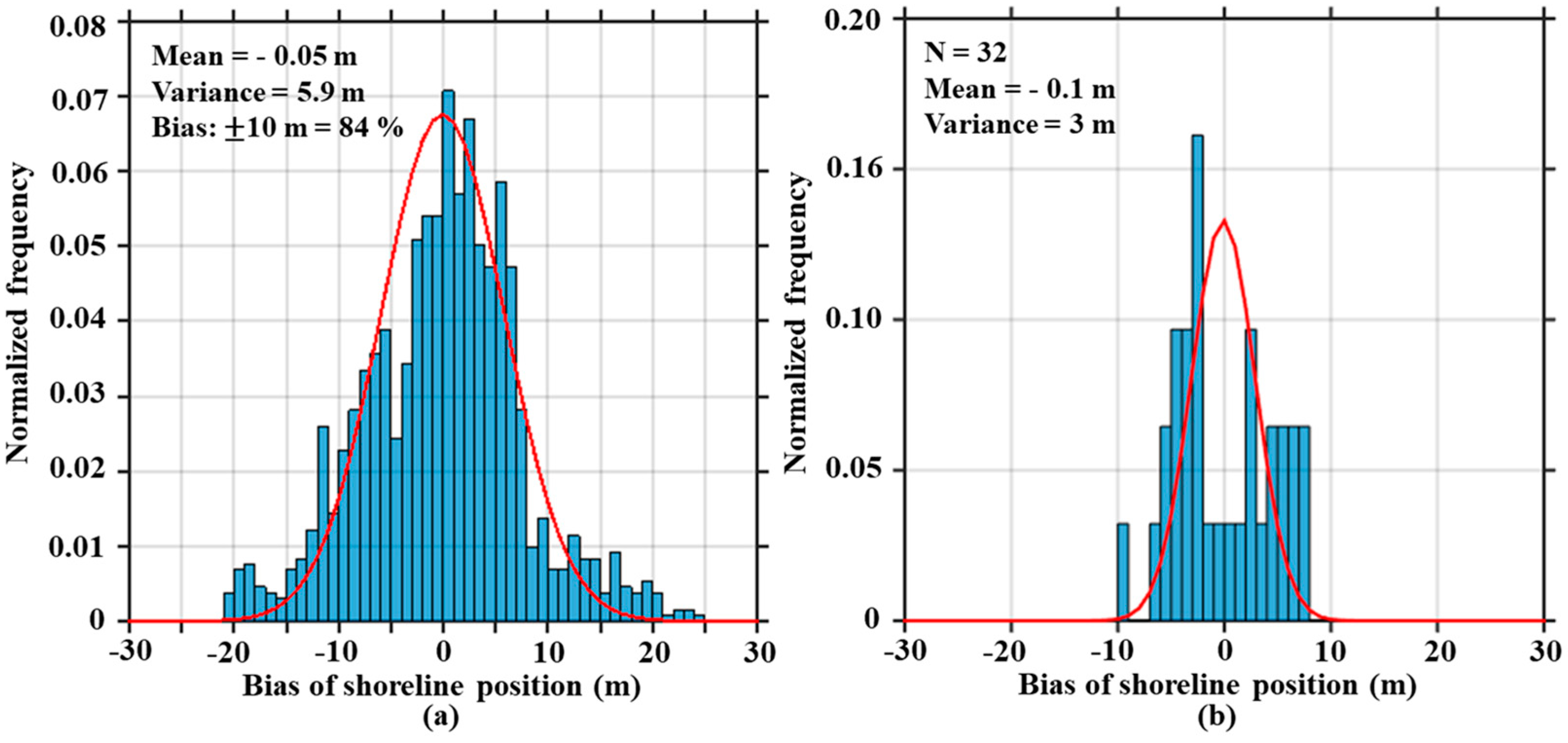
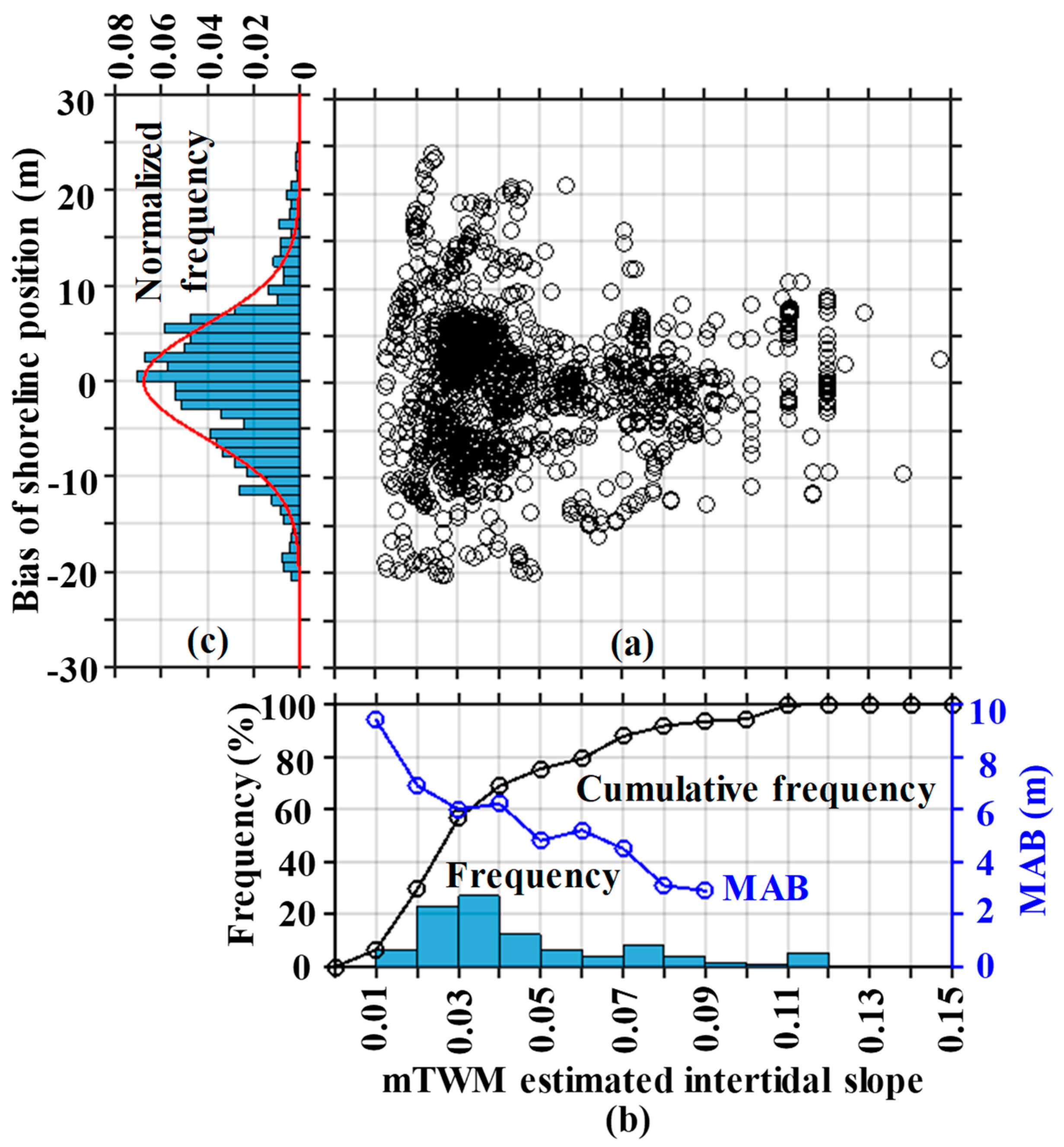
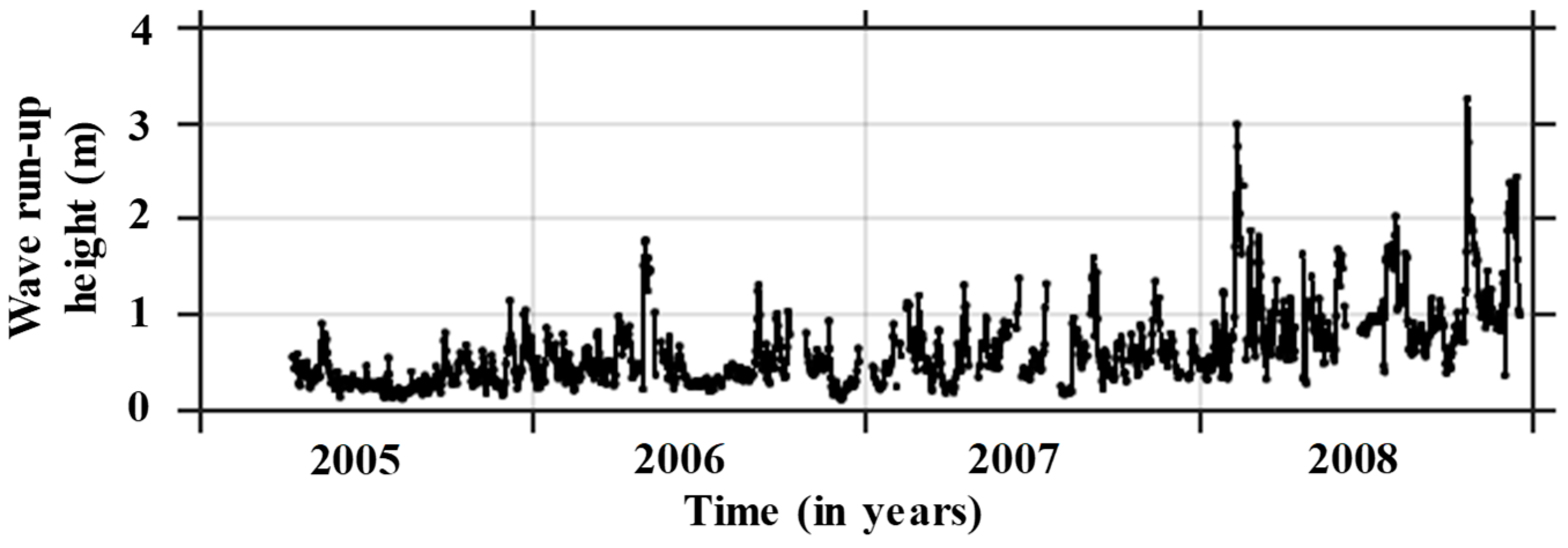
4.3. Wave Run-up Correction
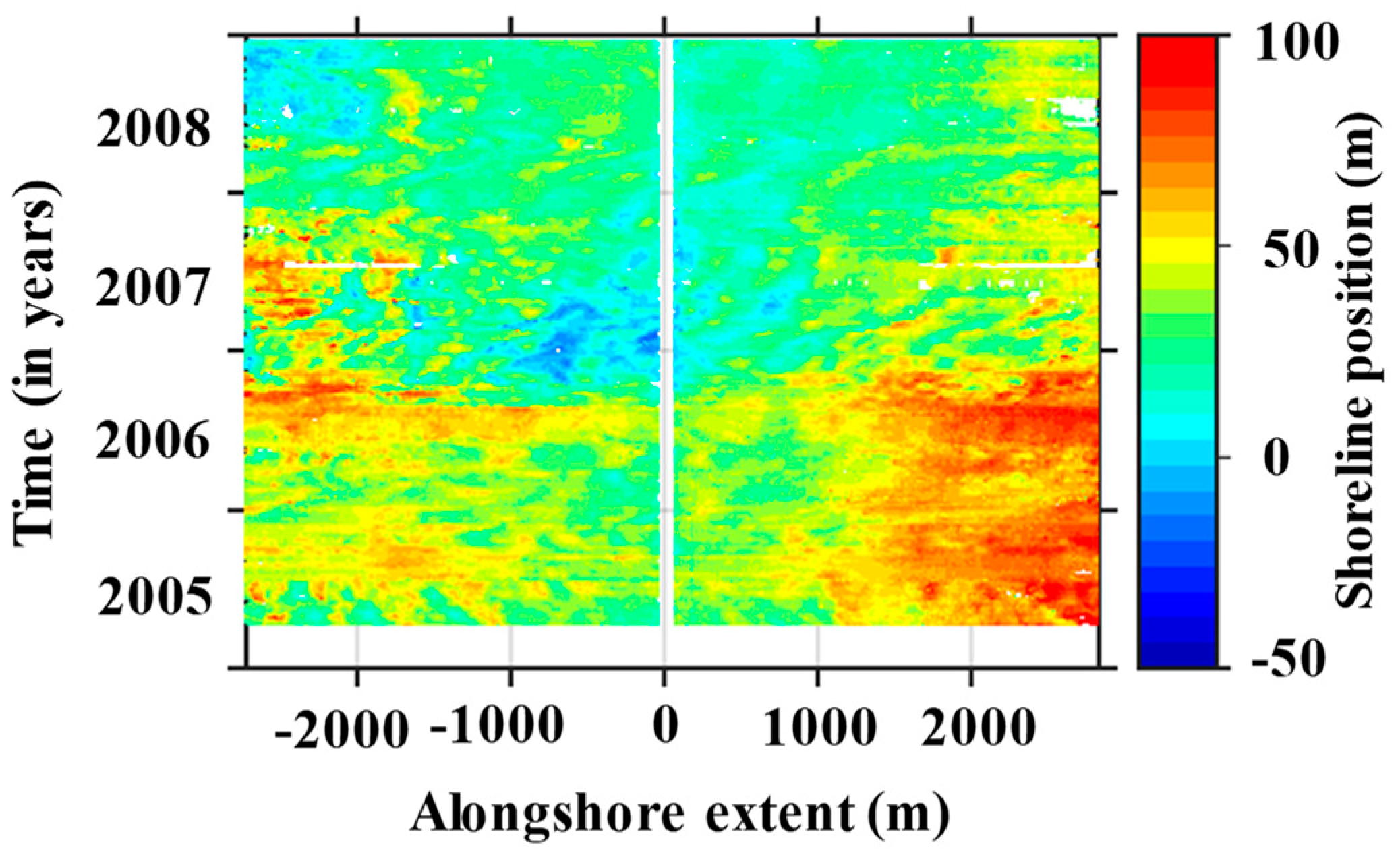
4.4. Shoreline Position Data Gaps Filled by Garcia’s Method
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Dolan, R.; Hayden, B.P.; May, P.; May, S. The reliability of shoreline changes measurements from aerial photographs. Shore Beach 1980, 48, 22–29. [Google Scholar]
- Boak, E.H.; Turner, I.L. Shoreline definition and detection: a review. J. Coast. Res. 2005, 21, 688–703. [Google Scholar] [CrossRef]
- Crowell, M.; Leatherman, S.P.; Buckley, M.K. Historical shoreline change: Error analysis and mapping accuracy. J. Coast. Res. 1991, 7, 839–852. [Google Scholar]
- Camfield, F.E.; Morang, A. Defining and interpreting shoreline change. Ocean Coast. Manag. 1996, 32, 129–151. [Google Scholar] [CrossRef]
- Kraus, N.C.; Rosati, J.D. Interpretation of Shoreline-Position Data for Coastal Engineering Analysis; Coastal Engineering Technical Note II-39 (No. CERC-CETN-II-39); U.S. Army Engineer Research and Development Center: Vicksburg, MS, USA, 1997. [Google Scholar]
- Takewaka, S. Measurements of shoreline positions and intertidal foreshore slopes with X-band marine radar system. Coast. Eng. J. 2005, 47, 91–107. [Google Scholar] [CrossRef]
- Hanslow, D.J. Beach erosion trend measurement: a comparison of trend indicators. J. Coast. Res. 2007, 50, 588–593. [Google Scholar]
- Ryu, J.H.; Kim, C.H.; Lee, Y.K.; Won, J.S.; Chun, S.S.; Lee, S. Detecting the intertidal morphologic change using satellite data. Estuar. Coast. Shelf Sci. 2008, 78, 623–632. [Google Scholar] [CrossRef]
- Chen, W.W.; Chang, H.K. Estimation of shoreline position and change from satellite images considering tidal variation. Estuar. Coast. Shelf Sci. 2009, 84, 54–60. [Google Scholar] [CrossRef]
- Chang, H.K.; Chen, W.W.; Liou, J.C. Shifting the waterlines of satellite images to the mean water shorelines considering wave runup, setup, and tidal variation. J. Appl. Remote Sens. 2015, 9, 096004. [Google Scholar] [CrossRef]
- García-Rubio, G.; Huntley, D.; Russell, P. Evaluating shoreline identification using optical satellite images. Mar. Geol. 2015, 359, 96–105. [Google Scholar] [CrossRef]
- Aarninkhof, S.G.; Turner, I.L.; Dronkers, T.D.; Caljouw, M.; Nipius, L. A video-based technique for mapping intertidal beach bathymetry. Coast. Eng. 2003, 49, 275–289. [Google Scholar] [CrossRef]
- Aarninkhof, S.G.J.; Ruessink, B.G.; Roelvink, J.A. Nearshore subtidal bathymetry from time-exposure video images. J. Geophys. Res. Oceans 2005, 110, C06011. [Google Scholar] [CrossRef]
- Holman, R.A.; Sallenger, A.H.; Lippmann, T.C.; Haines, J.W. The application of video image processing to the study of nearshore processes. Oceanography 1993, 6, 78–85. [Google Scholar] [CrossRef]
- Holland, K.T.; Holman, R.A. Video estimation of foreshore topography using trinocular stereo. J. Coast. Res. 1997, 13, 81–87. [Google Scholar]
- Plant, N.G.; Holman, R.A. Intertidal beach profile estimation using video images. Mar. Geol. 1997, 140, 1–24. [Google Scholar] [CrossRef]
- Uunk, L.; Wijnberg, K.M.; Morelissen, R. Automated mapping of the intertidal beach bathymetry from video images. Coast. Eng. 2010, 57, 461–469. [Google Scholar] [CrossRef]
- De Santiago, I.; Morichon, D.; Abadie, S.; Castelle, B.; Liria, P.; Epelde, I. Video monitoring nearshore sandbar morphodynamics on a partially engineered embayed beach. J. Coast. Res. 2013, 65, 458–463. [Google Scholar] [CrossRef]
- Sobral, F.; Pereira, P.; Cavalcanti, P.; Guedes, R.; Calliari, L. Intertidal bathymetry estimation using video images on a dissipative beach. J. Coast. Res. 2013, 65, 1439–1444. [Google Scholar] [CrossRef]
- Valentini, N.; Saponieri, A.; Molfetta, M.G.; Damiani, L. New algorithms for shoreline monitoring from coastal video systems. Earth Sci. Inform. 2017, 10, 495–506. [Google Scholar] [CrossRef]
- Austin, M.J.; Masselink, G. Observations of morphological change and sediment transport on a steep gravel beach. Mar. Geol. 2006, 229, 59–77. [Google Scholar] [CrossRef]
- Gaudin, D.; Delacourt, C.; Allemand, P.; Jaud, M.; Ammann, J.; Tisseau, C.; Véronique, C.U.Q. High resolution DEM derived from thermal infrared images: Example of Aber Benoit (France). In Proceedings of the 2009 IEEE International Geoscience and Remote Sensing Symposium, Cape Town, South Africa, 12–17 July 2009. [Google Scholar]
- Dankert, H.; Horstmann, J. A marine radar wind sensor. J. Atmos. Ocean. Technol. 2007, 24, 1629–1642. [Google Scholar] [CrossRef]
- Holman, R.; Haller, M.C. Remote sensing of the nearshore. Annu. Rev. Mar. Sci. 2013, 5, 95–113. [Google Scholar] [CrossRef] [PubMed]
- Bell, P.S. Shallow water bathymetry derived from an analysis of X-band marine radar images of waves. Coast. Eng. 1999, 37, 513–527. [Google Scholar] [CrossRef]
- Galal, E.M.; Takewaka, S. Longshore migration of shoreline mega-cusps observed with X-band radar. Coast. Eng. J. 2008, 50, 247–276. [Google Scholar] [CrossRef]
- An, S.; Takewaka, S. A Study on the morphological characteristics around artificial headlands in Kashima Coast, Japan. J. Coast. Res. 2016, 32, 508–518. [Google Scholar] [CrossRef]
- Bell, P.S.; Bird, C.O.; Plater, A.J. A temporal waterline approach to mapping intertidal areas using X-band marine radar. Coast. Eng. 2016, 107, 84–101. [Google Scholar] [CrossRef]
- Bird, C.O.; Bell, P.S.; Plater, A.J. Application of marine radar to monitoring seasonal and event-based changes in intertidal morphology. Geomorphology 2017, 285, 1–15. [Google Scholar] [CrossRef]
- Koopmans, B.N.; Wang, Y. Satellite radar data for topographic mapping of the tidal flats in the Wadden Sea, The Netherlands. In Proceedings of the Second Thematic Conference on Remote Sensing for Marine and Coastal Environments, New Orleans, LA, USA, 31 January–2 February 1994. [Google Scholar]
- Mason, D.C.; Davenport, I.J.; Robinson, G.J.; Flather, R.A.; McCartney, B.S. Construction of an inter-tidal digital elevation model by the “Water-Line” Method. Geophys. Res. Lett. 1995, 22, 3187–3190. [Google Scholar] [CrossRef]
- Heygster, G.; Dannenberg, J.; Notholt, J. Topographic mapping of the German tidal flats analyzing SAR images with the waterline method. IEEE Trans. Geosci. Remote Sens. 2010, 48, 1019–1030. [Google Scholar] [CrossRef]
- Ryu, J.H.; Won, J.S.; Min, K.D. Waterline extraction from Landsat TM data in a tidal flat: A case study in Gomso Bay, Korea. Remote Sens. Environ. 2002, 83, 442–456. [Google Scholar] [CrossRef]
- Zhao, B.; Guo, H.; Yan, Y.; Wag, Q.; Li, B. A simple waterline approach for tidelands using multi-temporal satellite images: A case study in the Yangtze Delta. Estuar. Coast. Shelf Sci. 2008, 77, 134–142. [Google Scholar] [CrossRef]
- Xu, Z.; Kim, D.J.; Kim, S.H.; Cho, Y.K.; Lee, S.G. Estimation of seasonal topographic variation in tidal flats using waterline method: A case study in Gomso and Hampyeong Bay, South Korea. Estuar. Coast. Shelf Sci. 2016, 183, 213–220. [Google Scholar] [CrossRef]
- Dellepiane, S.; De Laurentiis, R.; Giordano, F. Coastline extraction from SAR images and a method for the evaluation of the coastline precision. PPattern Recognit. Lett. 2004, 25, 1461–1470. [Google Scholar] [CrossRef]
- Fuse, T.; Ohkura, T. Development of shoreline extraction method based on spatial pattern analysis of Satellite SAR images. Remote Sens. 2018, 10, 1361. [Google Scholar] [CrossRef]
- Paravolidakis, V.; Ragia, L.; Moirogiorgou, K.; Zervakis, M. Automatic coastline extraction using edge detection and optimization procedures. Geosciences 2018, 8, 407. [Google Scholar] [CrossRef]
- Pardo-Pascual, J.E.; Almonacid-Caballer, J.; Ruiz, L.A.; Palomar-Vázquez, J. Automatic extraction of shorelines from Landsat TM and ETM+ multi-temporal images with subpixel precision. Remote Sens. Environ. 2012, 123, 1–11. [Google Scholar] [CrossRef]
- Katoh, K. Changes of sand grain distribution in the surf zone. In Proceedings of the Coastal Dynamics, New York, NY, USA, 1 January 1995; pp. 335–364. [Google Scholar]
- Kuriyama, Y. Medium-term bar behavior and associated sediment transport at Hasaki, Japan. J. Geophys. Res. Oceans 2002, 107, 15–19. [Google Scholar] [CrossRef]
- Kuriyama, Y.; Ito, Y.; Yanagishima, S. Medium-term variations of bar properties and their linkages with environmental factors at Hasaki, Japan. Mar. Geol. 2008, 248, 1–10. [Google Scholar] [CrossRef]
- Hasan, G.J.; Takewaka, S. Observation of a stormy wave field with X-band radar and its linear aspects. Coast. Eng. J. 2007, 49, 149–171. [Google Scholar] [CrossRef]
- Hasan, G.J.; Takewaka, S. Wave run-up analyses under dissipative condition using X-band radar. Coast. Eng. J. 2009, 51, 177–204. [Google Scholar] [CrossRef]
- Takewaka, S.; Taishi, Y. Rip current observation with X-band radar. Coast. Eng. Proc. 2012, 1, 43. [Google Scholar] [CrossRef]
- Zhai, Y. Time-Dependent Scour Depth under Bridge-Submerged Flow. Master’s Thesis, University of Nebraska-Lincoln, Lincoln, NE, USA, May 2010. [Google Scholar]
- Lentz, S.; Raubenheimer, B. Field observations of wave setup. J. Geophys. Res. Oceans 1999, 104, 25867–25875. [Google Scholar] [CrossRef]
- Goda, Y. Random Seas and Design of Maritime Structures, 3rd ed.; World Scientific Publishing Company: Singapore, 2010. [Google Scholar]
- Melby, J.A. Wave Runup Prediction for Flood Hazard Assessment; Technical Report ERDC/CHL TR-12-24; Coastal and Hydraulics Laboratory, U.S. Army Engineer Research and Development Center: Vicksburg, MS, USA, 2012; p. 126. [Google Scholar]
- Hunt, I.A. Design of sea-walls and breakwaters. Trans. Am. Soc. Civ. Eng. 1959, 126, 542–570. [Google Scholar]
- Mase, H. Random wave runup height on gentle slope. J. Waterw. Port Coast. Ocean Eng. 1989, 115, 649–661. [Google Scholar] [CrossRef]
- Ruessink, B.G.; Kleinhans, M.G.; Van den Beukel, P.G.L. Observations of swash under highly dissipative conditions. J. Geophys. Res. Oceans 1998, 103, 3111–3118. [Google Scholar] [CrossRef]
- Ruggiero, P.; Holman, R.A.; Beach, R.A. Wave run-up on a high-energy dissipative beach. J. Geophys. Res. Oceans 2004, 109, C06025. [Google Scholar] [CrossRef]
- Stockdon, H.F.; Holman, R.A.; Howd, P.A.; Sallenger, A.H., Jr. Empirical parameterization of setup, swash, and runup. Coast. Eng. 2006, 53, 573–588. [Google Scholar] [CrossRef]
- Holman, R.A.; Bowen, A.J. Longshore structure of infragravity wave motions. J. Geophys. Res. Oceans 1984, 89, 6446–6452. [Google Scholar] [CrossRef]
- Iribarren Cavanilles, R.; Casto Nogales, M. Protection Des Ports; Technical Report; PIANC: Lisbon, Portugal, 1 January 1949. [Google Scholar]
- Garcia, D. Robust smoothing of gridded data in one and higher dimensions with missing values. Comp. Stat. Data Anal. 2010, 54, 1167–1178. [Google Scholar] [CrossRef]
- Wang, G.; Garcia, D.; Liu, Y.; De Jeu, R.; Dolman, A.J. A three-dimensional gap filling method for large geophysical datasets: Application to global satellite soil moisture observations. Environ. Model. Softw. 2012, 30, 139–142. [Google Scholar] [CrossRef]
- Galal, E.M.; Takewaka, S. Temporal and spatial shoreline variability observed with a X-band radar at Hasaki coast, Japan. In Proceedings of the Coastal Sediments, San Diego, CA, USA, 11–15 May 2015; pp. 1–9. [Google Scholar]
- Kuriyama, Y.; Lee, J.H. Medium-term beach profile change on a bar-trough region at Hasaki, Japan, investigated with complex principal component analysis. In Proceedings of the Fourth Conference on Coastal Dynamics, Lund, Sweden, 11–15 June 2001; pp. 959–968. [Google Scholar]











© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kumar, D.; Takewaka, S. Automatic Shoreline Position and Intertidal Foreshore Slope Detection from X-Band Radar Images Using Modified Temporal Waterline Method with Corrected Wave Run-up. J. Mar. Sci. Eng. 2019, 7, 45. https://doi.org/10.3390/jmse7020045
Kumar D, Takewaka S. Automatic Shoreline Position and Intertidal Foreshore Slope Detection from X-Band Radar Images Using Modified Temporal Waterline Method with Corrected Wave Run-up. Journal of Marine Science and Engineering. 2019; 7(2):45. https://doi.org/10.3390/jmse7020045
Chicago/Turabian StyleKumar, Dipankar, and Satoshi Takewaka. 2019. "Automatic Shoreline Position and Intertidal Foreshore Slope Detection from X-Band Radar Images Using Modified Temporal Waterline Method with Corrected Wave Run-up" Journal of Marine Science and Engineering 7, no. 2: 45. https://doi.org/10.3390/jmse7020045
APA StyleKumar, D., & Takewaka, S. (2019). Automatic Shoreline Position and Intertidal Foreshore Slope Detection from X-Band Radar Images Using Modified Temporal Waterline Method with Corrected Wave Run-up. Journal of Marine Science and Engineering, 7(2), 45. https://doi.org/10.3390/jmse7020045