The safe design of a shafting system on a ship has been a critical issue for a long time. If unexpected problems on a shafting system occur on the voyage under harsh sea conditions, the safety of people on the ship would be at risk. With this reason in mind, a shafting system has been designed conservatively according to the strict guidance of classification societies. A shafting system consists of a propeller, a shaft, bearings and so on. The load on stern tube bearing located in front of a propeller is directly related to the eccentric force of a propeller [
1]. Since a propeller rotates in a non-uniform wake field, eccentric force on a propeller is continuously provided and they are changed dramatically during ship turning. Although a number of processes to calculate or check for the design of a shafting system exist, unintended problems, such as stern tube bearing damage, are rarely but still addressed. Moreover, classification societies such as ABS [
2] or DNV-GL [
3] have published a revised guideline for the safe design of a shafting system. The predicted eccentric force of a propeller from numerical simulations is used to calculate the stern tube bearing load to ultimately secure the safety of a shafting system. For this purpose, detail conditions, including draft and ship speed for reliable numerical simulations, are strictly clarified in the guidelines of most of the classification societies. Besides, some researchers have investigated a safe shafting system for a long time in line with academic interests or engineering needs. Kuroiwa et al. [
4] proposed a quasi-steady method to estimate the wake into the propeller during ship turning and showed that the propeller shaft force evaluated by the proposed method was similar to the measured value from the model test. Vartdal et al. [
5] analyzed the lateral force on the propeller during ship turning motion by full-scale measurement in various ship types. They calculated the contact pressure in the tail shaft bearing using the FEM simulation. Moreover, they asserted that the CFD simulation can be an effective method of predicting these forces with reasonable accuracy. Ui [
1] investigated the influence of propeller force on shaft alignment based on the data from 35 vessels of 10 ship-yards participating in the JIME research committee. He examined two representative trouble cases; (1) A hard turn to starboard side, (2) An extremely shallow draught. Coraddu et al. [
6] showed asymmetric propeller behavior obtained by thrust and torque measurement on a twin-screw vessel during a free running test. Different wake distribution into two propellers (leeward and windward) during the ship-turning motion was simulated by numerical method. Based on this wake, the propeller loads were evaluated using BEMT model. Shin [
7] studied the effect of propeller force on propeller shaft bearing during straight run and turning. He simulated the nominal wake using commercial RANS solver and evaluated the eccentric force of a propeller using a potential code, MPUF3A. In particular, he considered the hull deflection in the shaft alignment. Ortolani et al. [
8] investigated the radial bearing force exerted by the propeller during model ship operation. In particular, a free running test was carried out and the realistic radial bearing forces were measured. Dubbioso et al. [
9] analyzed the turning capability of a navy supply vessel with different rudder arrangements; twin rudders with a centerline skeg and single rudder. Due to the centerline skeg in the case of the twin rudders, the inflow to the propeller was fairly different to that of the single rudder during ship turning. Lee et al. [
10] investigated the propeller eccentric force and the load of the stern tube bearing on a CRP system, compared to those of conventional single propellers. They implemented the sliding mesh technique to directly obtain the eccentric force on the propeller. They showed the shaft behavior inside the Aft-stern bush bearing in the CRP system. Dubbioso et al. [
11] investigated the propeller bearing load of a twin-screw frigate vessel in a straight ahead and steady turning motion. They evaluated the wake distributions using a URANS simulation with an overlapping grid approach. The bearing loads evaluated by the BEMT model and the measurements were compared, and they tended to be similar to each other. Muscari et al. [
12] examined the effect of the centerline skeg and the propeller rotation direction on the propeller bearing load in a twin-screw vessel. From their study, it can be inferred that the wake is significantly affected by the appendages around the propeller during ship turning. Ortolani and Dubbioso [
13,
14] measured the single blade loads on propellers during a free-running operation; a straight ahead and a steady turning motion. Their experimental data provided the insight to understand the interaction between the wake and the propeller.
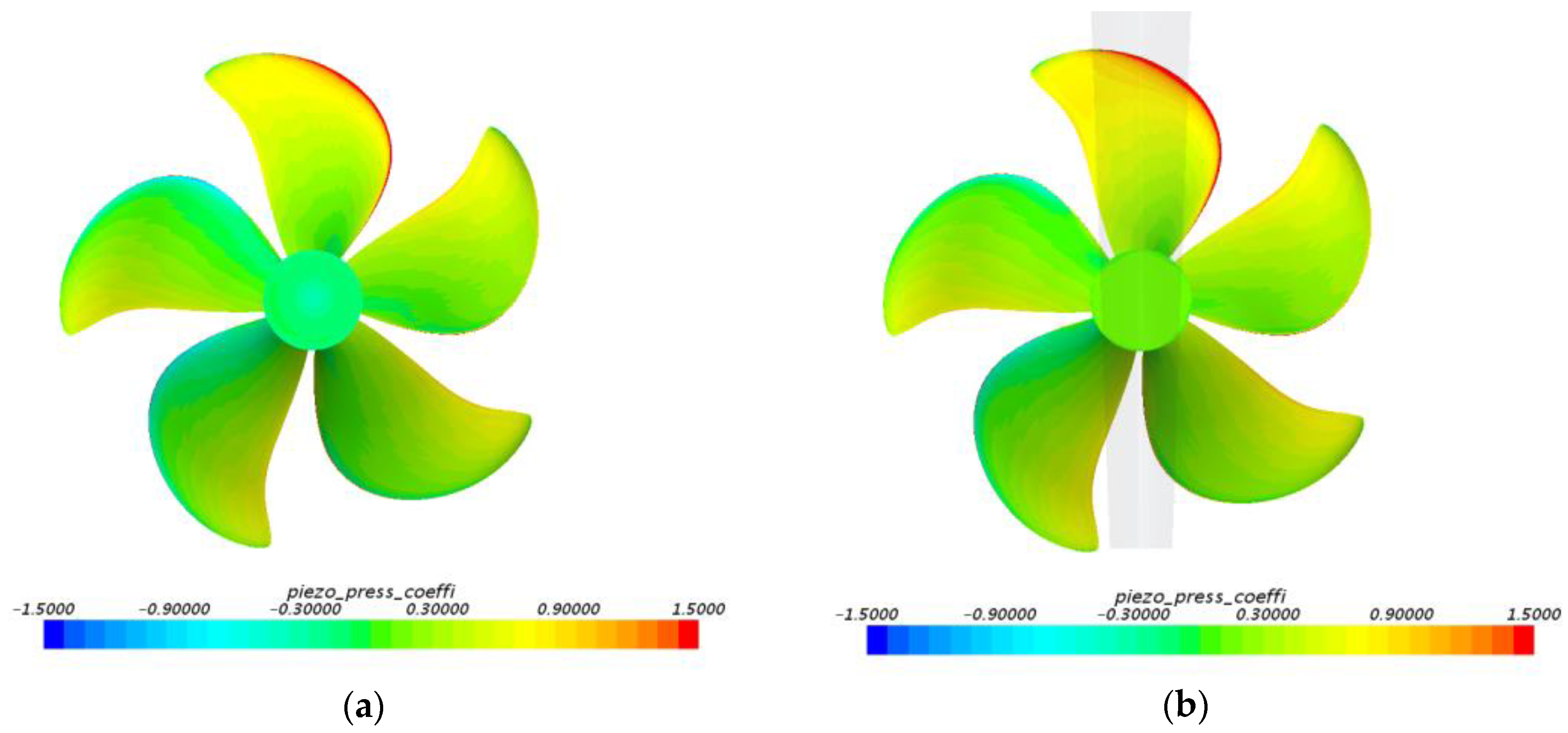
From many previous studies, it can be inferred that several factors are influencing propeller eccentric force. Among them, this paper focused on the effect of a rudder. To analyze the effect of rudder existence, numerical simulations involving two cases with and without a rudder were conducted under the same conditions for straight run or turning motion, and then the propeller eccentric force in these simulations was compared to each other.


































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}