Response of a Porous Seabed around an Immersed Tunnel under Wave Loading: Meshfree Model




Abstract
1. Introduction
2. Theoretical Models
2.1. Flow Model
2.2. Seabed Model
2.3. Boundary Conditions
2.4. Meshfree Model for the Seabed Domain
2.5. Integration Procedure of Flow Model and Seabed Model
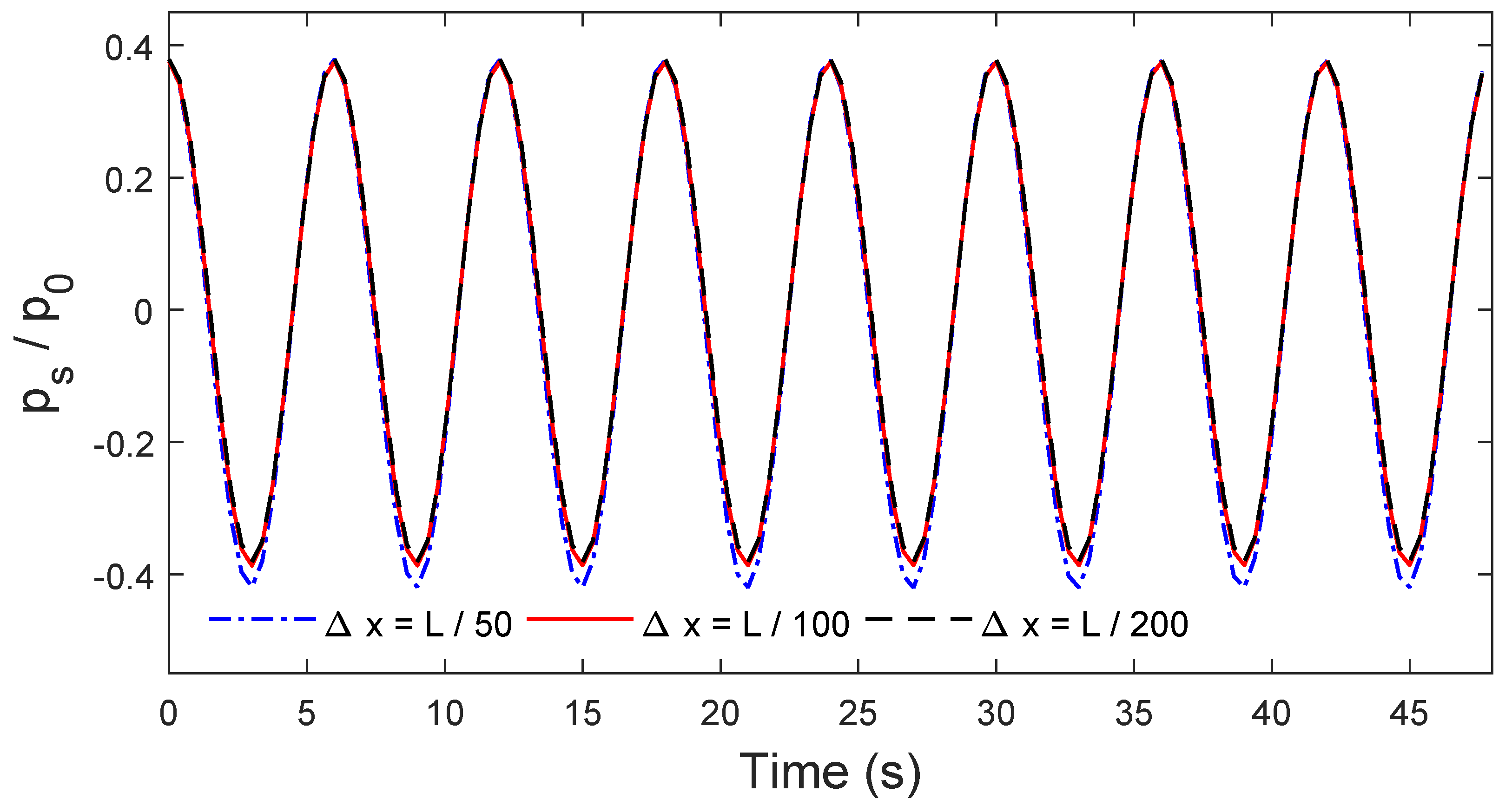
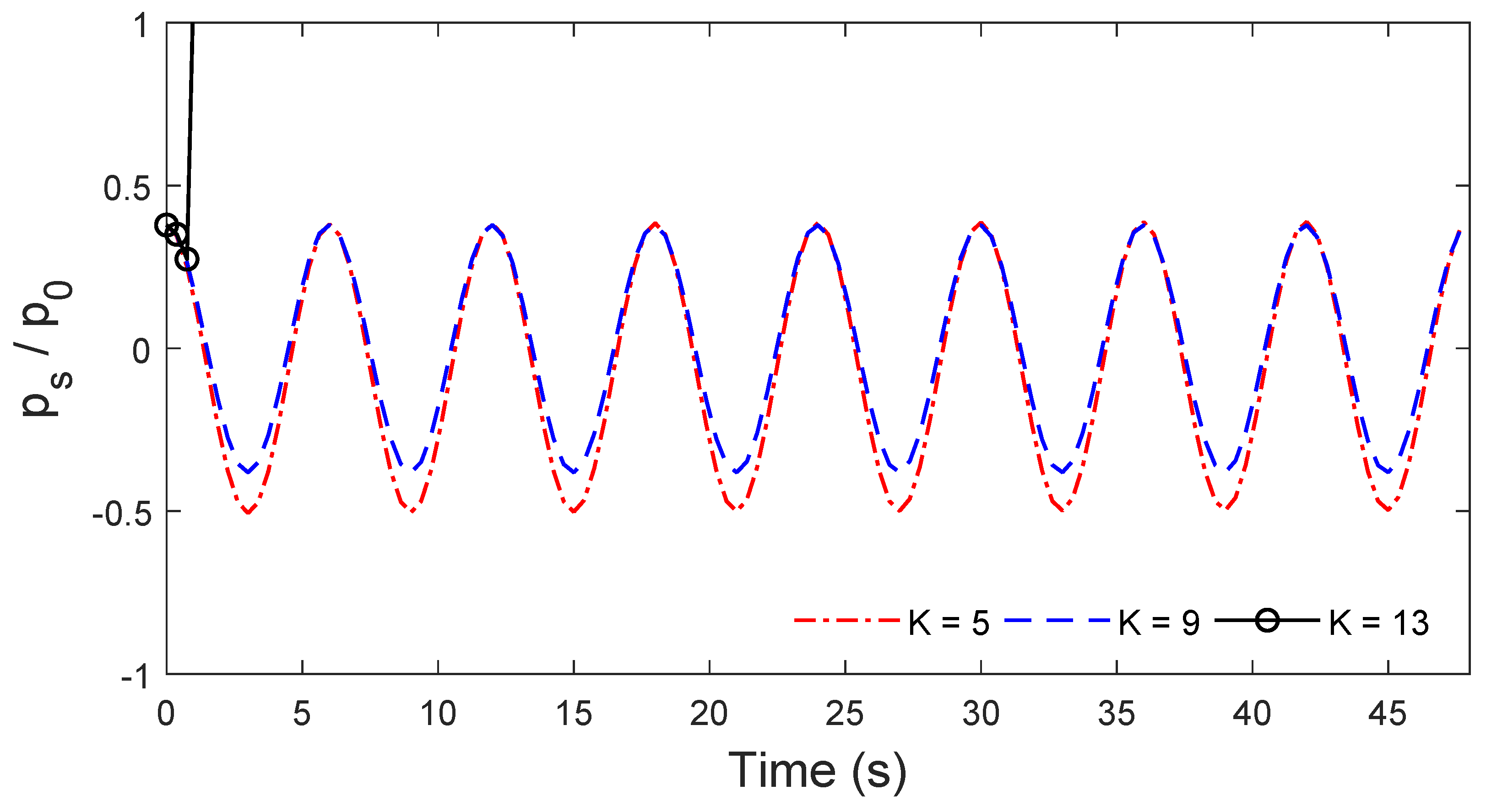
2.6. Convergence Tests
3. Verification of the Proposed Model
3.1. Comparison of the Present Model and the Analytical Solution for Wave-Seabed Interactions
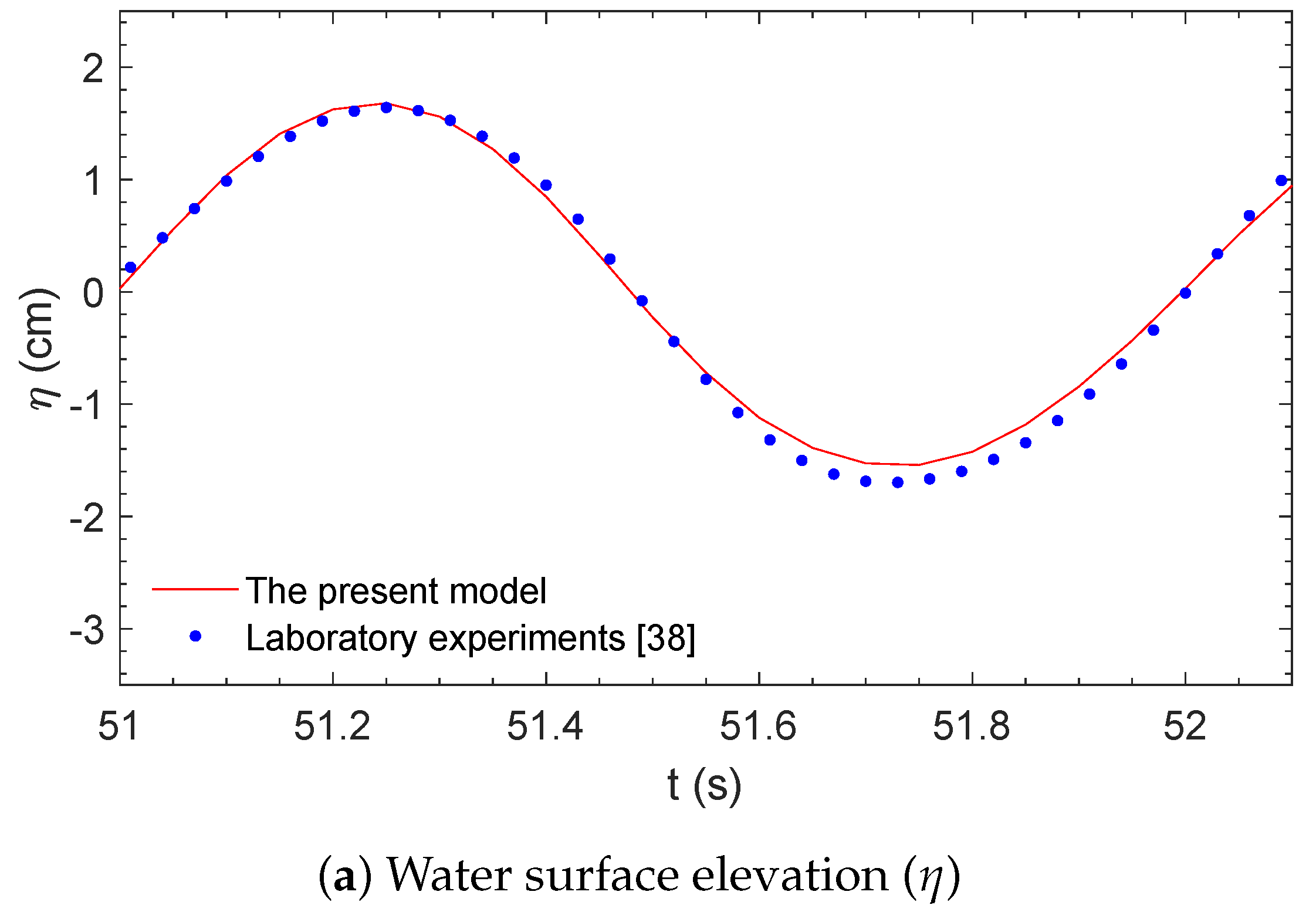
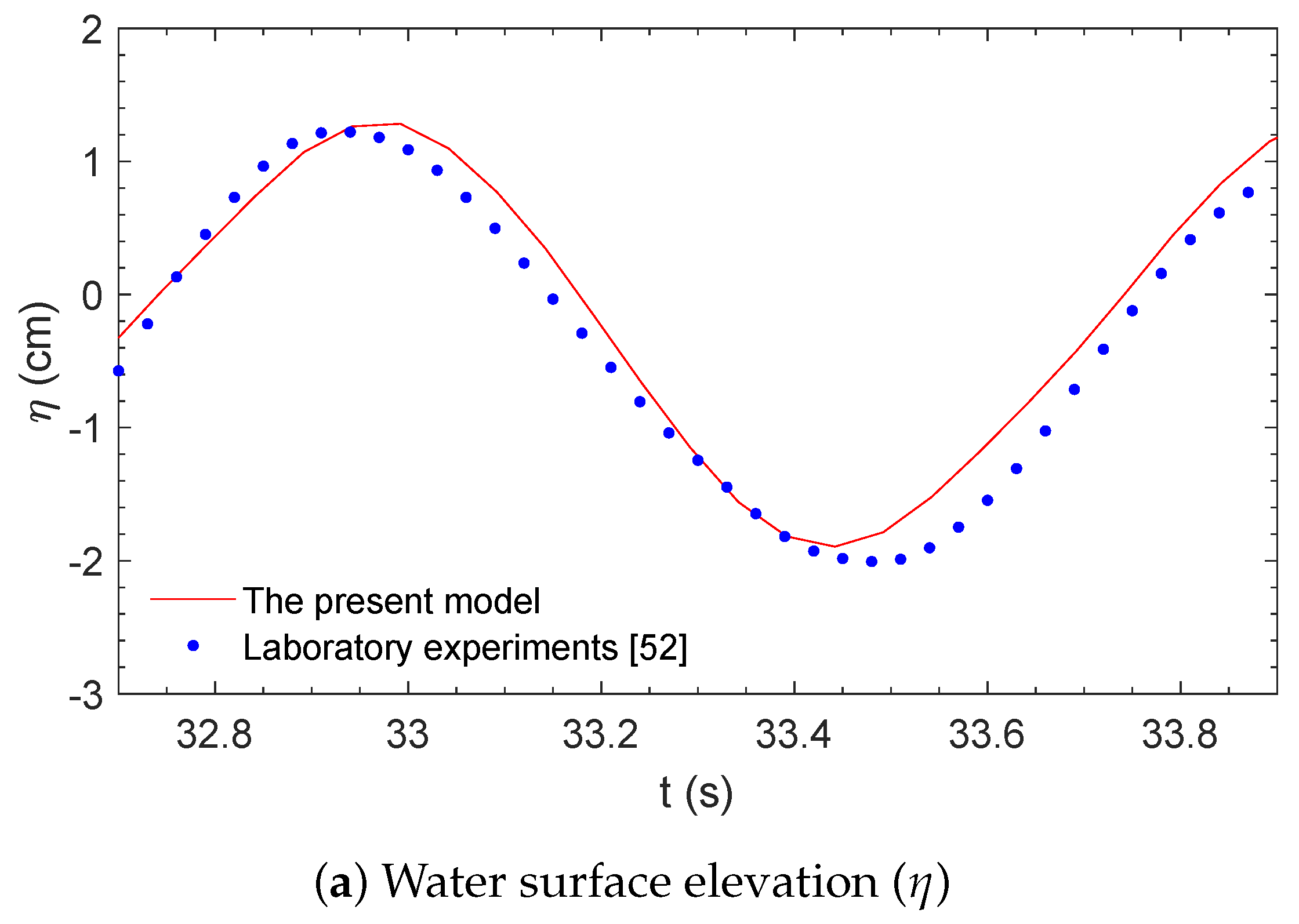
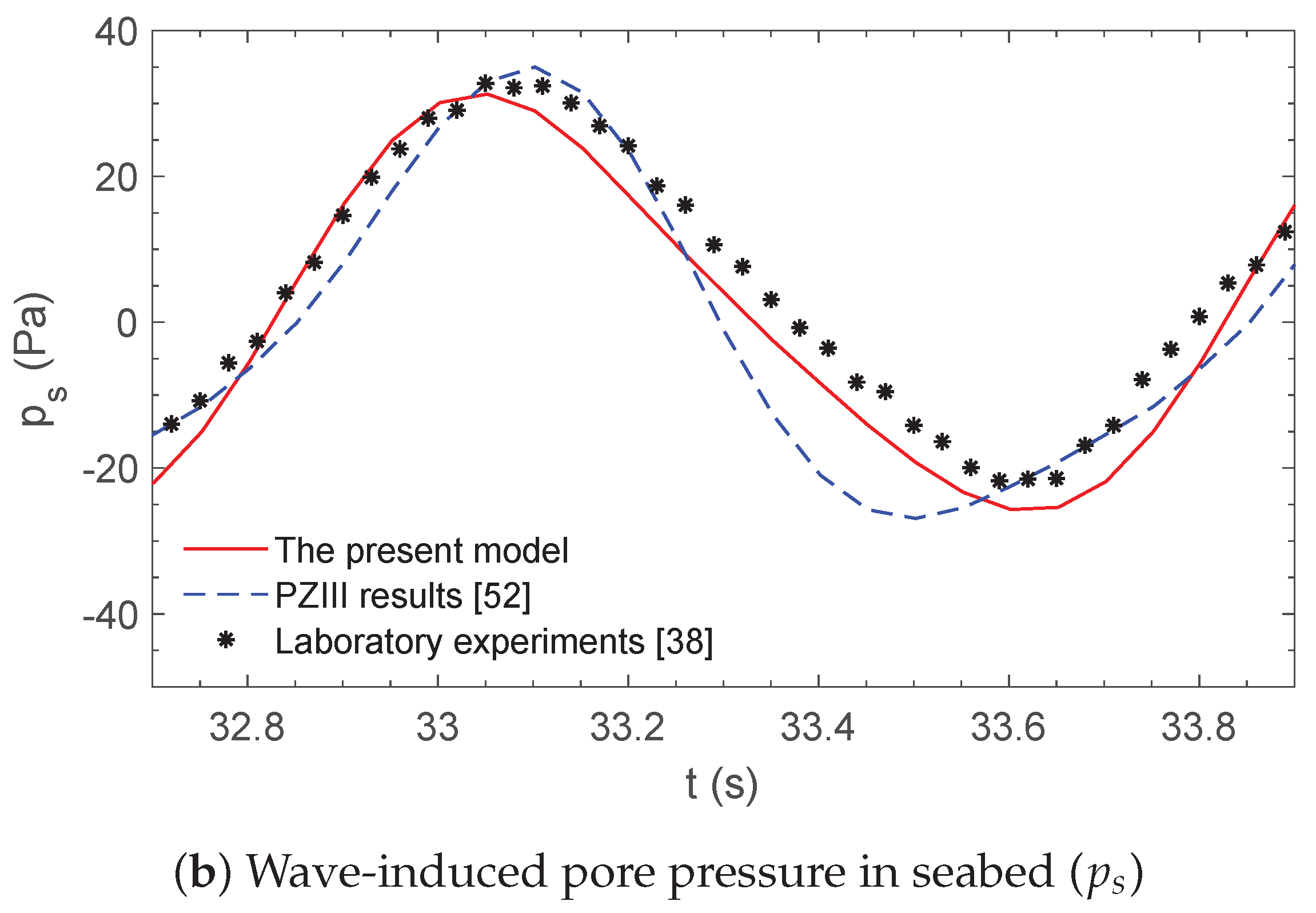
3.2. Comparison of the Present Model with the Laboratory Experiments and Fem Results for Combined Waves and Current Loading
4. Dynamic Response of the Seabed
5. Wave-Induced Liquefaction
6. Parametric Study
6.1. Effects of Wave Characteristics
6.2. Effects of Soil Properties
6.3. Effects of Current
7. Conclusions
- (1)
- The newly developed meshfree model is well validated by comparison with the analytical solution, the laboratory experiments and previous numerical results. The LRBFCM is examined to be reliable in simulation of wave-induced oscillatory liquefaction behaviour of a seabed. Moreover, on the consequence of mesh-independence, the present model is more efficient than the conventional model based on FEM (Finite element method) or FVM (Finite volume method).
- (2)
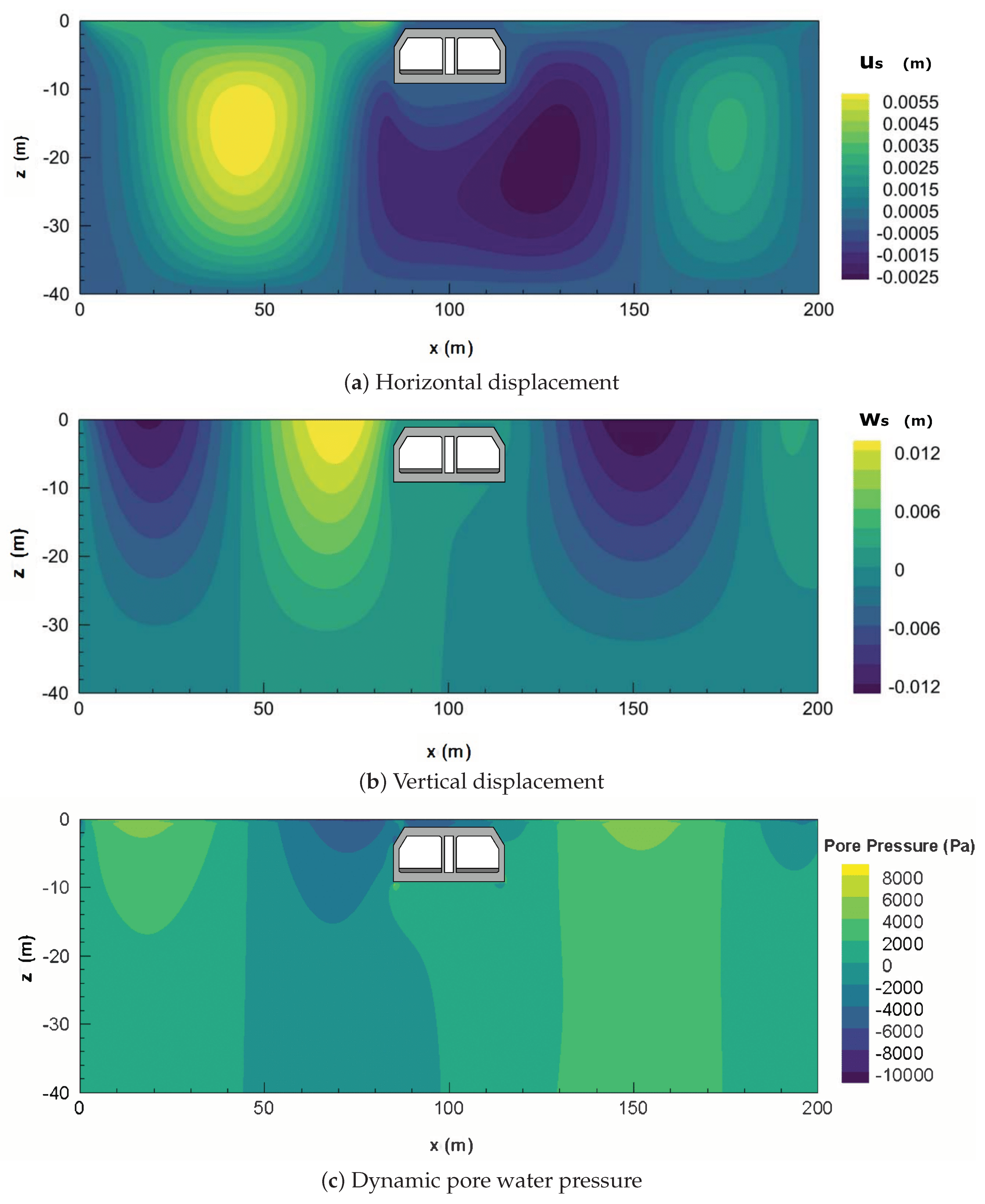
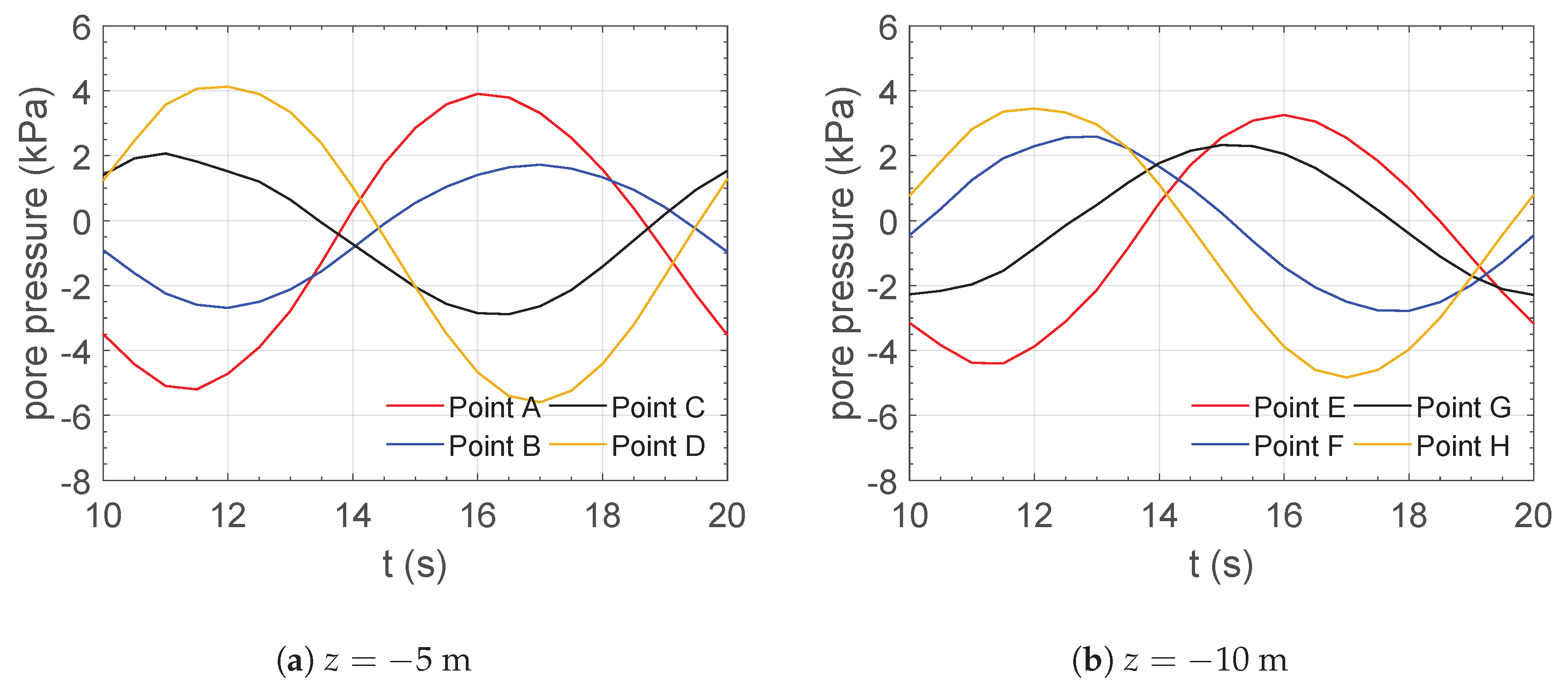
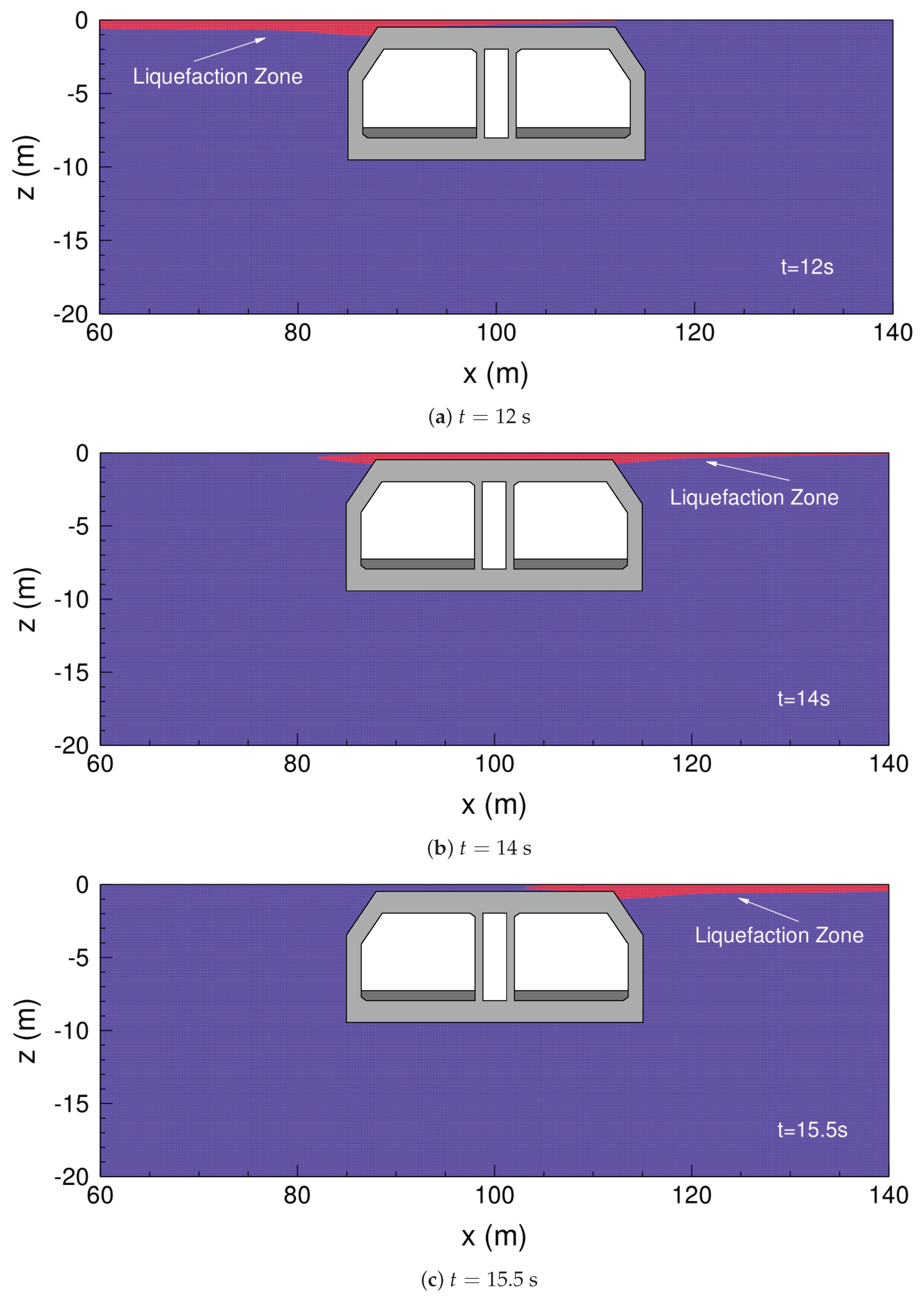
- The existence of the immersed tunnel affects surrounding seabed dynamic behaviours, which are able to weaken the displacement and dynamic pore pressure change nearby. Furthermore, the maximum liquefied depth on the right of the tunnel is smaller than that on the left.
- (3)
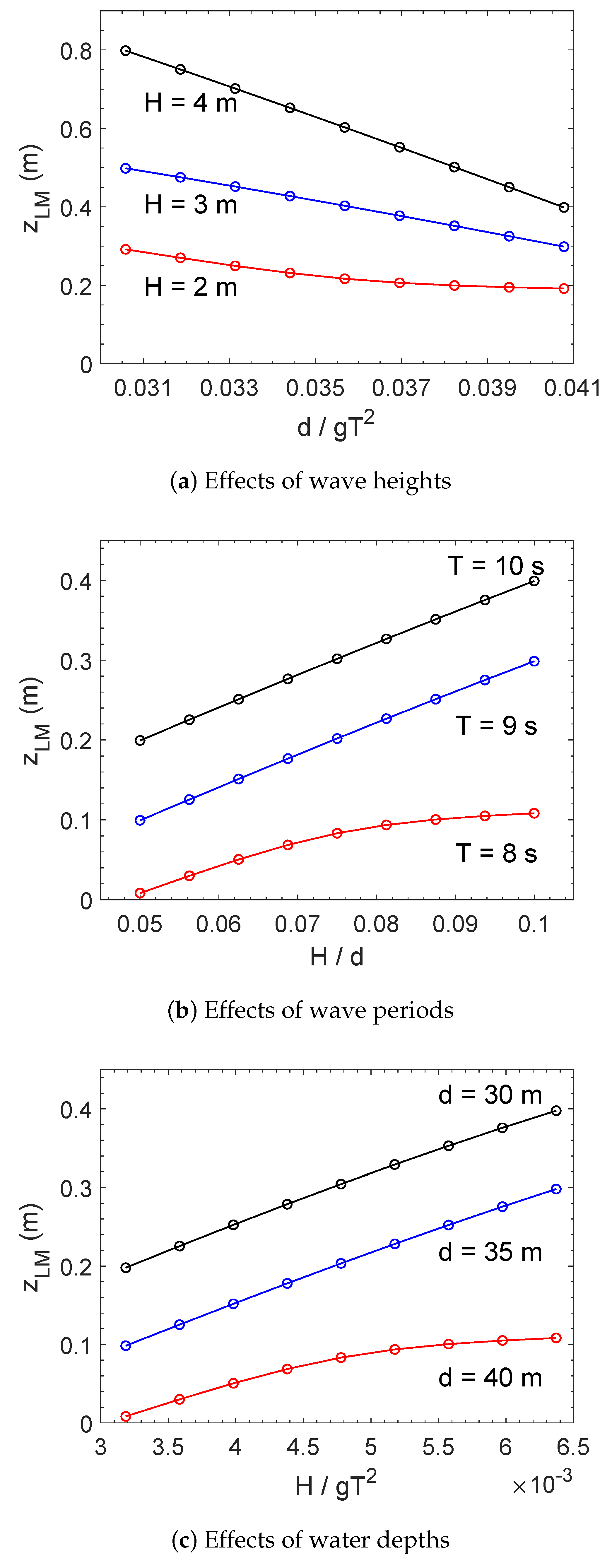
- The wave-induced transient liquefaction around the tunnel is highly relative to the wave characteristics. It is found that the seabed liquefaction is more likely to occur under a shallow water area with the waves of large wave height and long period.
- (4)
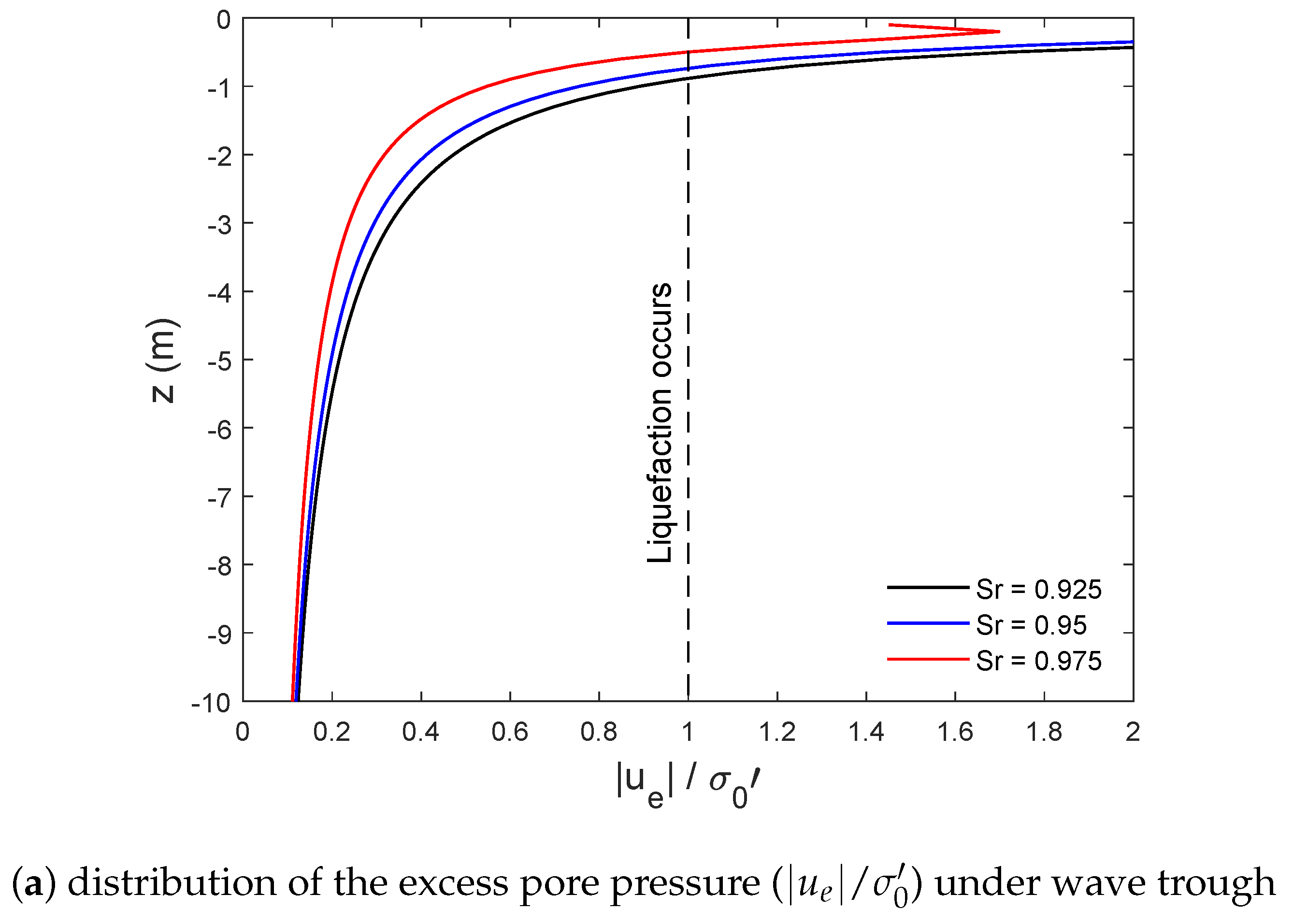
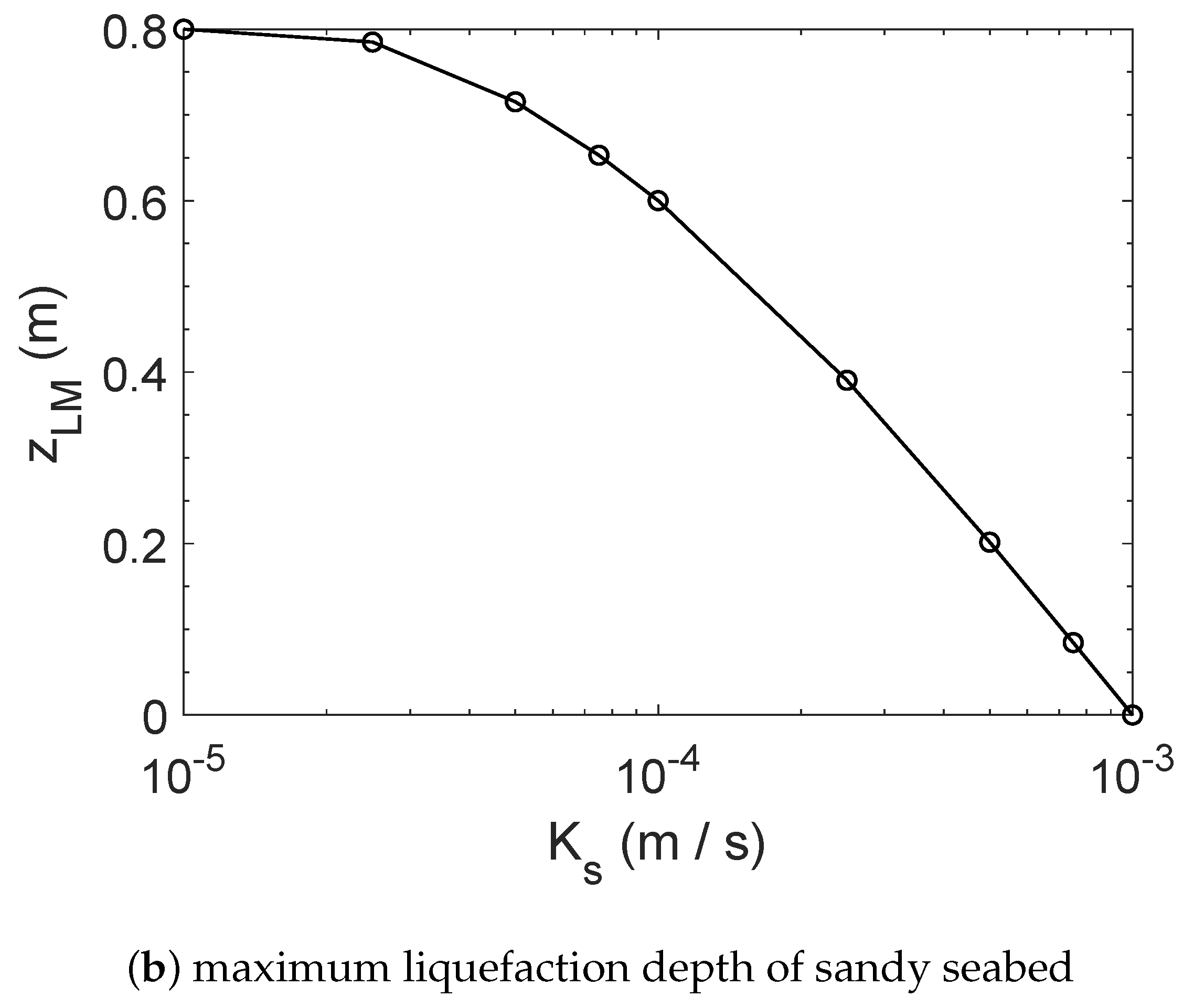
- The parametric studies show that the soil properties around tunnel have a significant impact on the liquefaction behaviour as well. The smaller the soil permeability and degree of saturation adopted, the deeper the liquefaction occurs in the vicinity of the tunnel.
- (5)
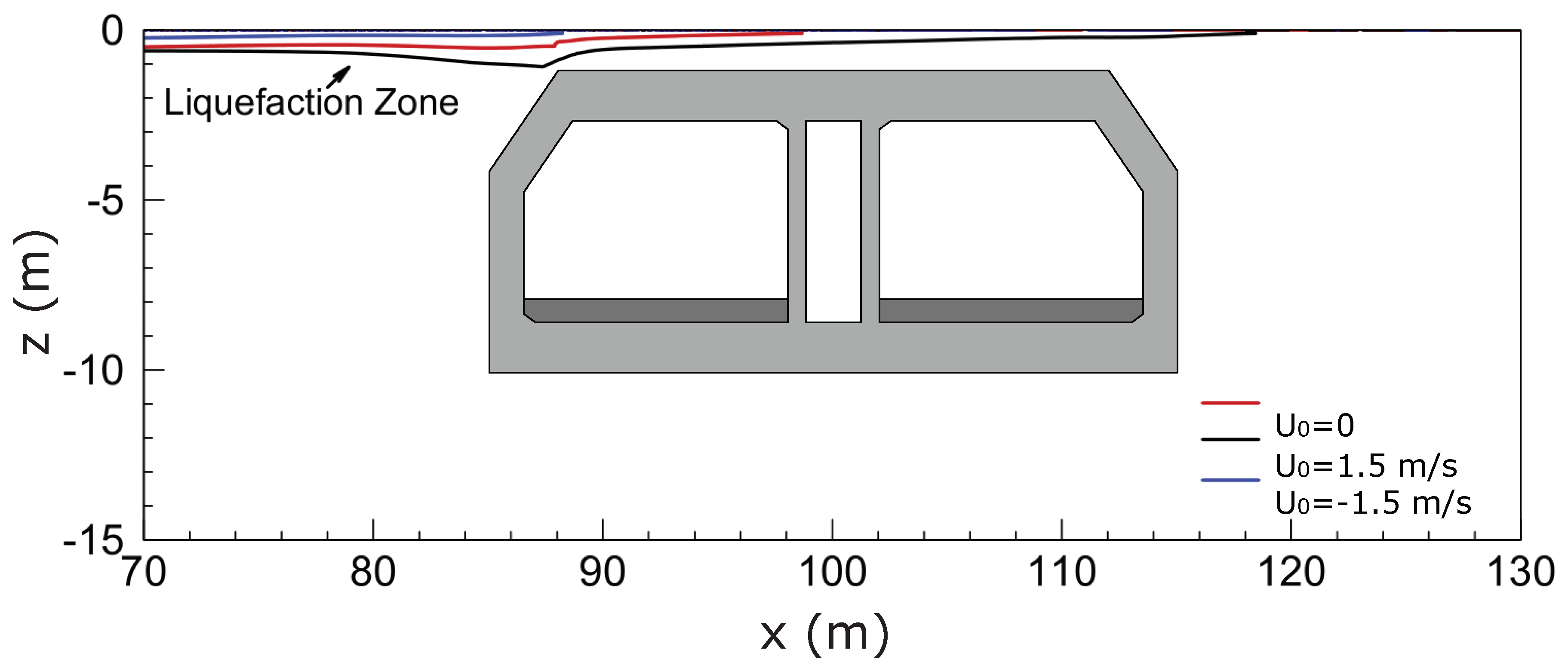
- Based on the numerical result, the occurrence of currents could obviously affect wave-induced liquefaction. The following current can aggravate the seabed liquefaction while the opposing current can decrease the liquefied risk around the tunnel.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| The amplitude of linear wave pressure at the seabed surface | |
| The dynamic wave pressure at the seabed surface | |
| Unit weight of water | |
| Soil porosity | |
| The compressibility of pore fluid | |
| The bulk modulus of pore fluid | |
| Darcy’s volume-averaging operator | |
| The intrinsic averaging operator | |
| , | Density of water and air |
| , | Density of fluid and solid |
| Average density of a porous seabed | |
| The indicator function | |
| The velocity vector | |
| The gravitational acceleration | |
| The efficient dynamic viscosity | |
| The molecular dynamic viscosity | |
| The turbulent kinetic viscosity | |
| The medium grain diameter of the material | |
| The Keulegan-Carpenter number | |
| The period of the oscillatory | |
| , | Water and air properties |
| , | The effective normal stresses in the x- and z-directions |
| The initial effective stress | |
| The shear stress | |
| , | The soil displacement in the x- and z-directions |
| b | Tunnel buried depth |
| The true bulk modulus of the elasticity of water | |
| The degree of saturation | |
| The absolute water pressure | |
| The pore water pressure | |
| The excess pore pressure geberated by the wave loading | |
| The undetermined coefficient related to RBF of a linear equation | |
| The psedo-dynamic pressure | |
| G | The shear modulus |
| K | The number of nearest neighbour nodes |
| H | Wave height |
| d | Water depth |
| h | Seabed thickness |
| T | Wave period |
| Current velocity | |
| Poisson’s ratio | |
| Soil permeability | |
| Wave profile | |
| E | Young’s modulus |
| L | Wavelength |
| Seabed length | |
| z | Soil depth |
| The turbulence kinetic energy | |
| The turbulence energy dissipation rate | |
| The volume strain | |
| An empirical constant relate to the turbulent viscosity | |
| c | Shape factor |
| Time steps in a period | |
| FEM | Finite Element Method |
| FVM | Finite Volume Method |
| VARANS | Volume-Average Reynolds-Average Navier-Stokes |
| VOF | Volume of fluid |
| 2D | Two-dimensional |
| 3D | Three-dimensional |
| LRBFCM | Local radial basis function collocation method |
| MLS | Moving least-square method |
| PIM | Point interpolation method |
| RBF | Radial basis function |
| MQ | Multiquadrics |
| GRBFCM | Global radial basis function collocation method |
References
- Zen, K.; Yamazaki, H. Mechanism of wave-induced liquefaction and densification in seabed. Soils Found. 1990, 30, 90–104. [Google Scholar] [CrossRef]
- Sumer, B.M.; Fredsøe, J. The Mechanics of Scour in the Marine Environment; World Scientific Publishing Co. Pte. Ltd.: Singapore, 2002. [Google Scholar]
- Jeng, D.S. Mechanics of Wave-Seabed-Structure Interactions: Modelling, Processes and Applications; Cambridge University Press: Cambridge, MA, USA, 2018. [Google Scholar]
- Yamamoto, T.; Koning, H.; Sellmeijer, H.; Hijum, E.V. On the response of a poro-elastic bed to water waves. J. Fluid Mech. 1978, 87, 193–206. [Google Scholar] [CrossRef]
- Seed, H.B.; Rahman, M.S. Wave-induced pore pressure in relation to ocean floor stability of cohesionless soils. Mar. Geotechnol. 1978, 3, 123–150. [Google Scholar] [CrossRef]
- Jeng, D.S.; Seymour, B.R. A simplified analytical approximation for pore-water pressure build-up in a porous seabed. J. Waterw. Port Coast. Ocean Eng. ASCE 2007, 133, 309–312. [Google Scholar] [CrossRef]
- Hsu, J.R.C.; Jeng, D.S. Wave-induced soil response in an unsaturated anisotropic seabed of finite thickness. Int. J. Numer. Anal. Methods Geomech. 1994, 18, 785–807. [Google Scholar] [CrossRef]
- Jeng, D.S. Porous Models for Wave-Seabed Interactions; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Jeng, D.S.; Ye, J.H.; Zhang, J.S.; Liu, P.L.F. An integrated model for the wave-induced seabed response around marine structures: Model verifications and applications. Coast. Eng. 2013, 72, 1–19. [Google Scholar] [CrossRef]
- Zhao, H.Y.; Jeng, D.S. Accumulation of pore pressures around a submarine pipeline buried in a trench layer with partially backfills. J. Eng. Mech. ASCE 2016, 142, 04016042. [Google Scholar] [CrossRef]
- Kasper, T.; Steenfelt, J.; Pedersen, L.; Jackson, P.; Heijmans, R. Stability of an immersed tunnel in offshore conditions under deep water wave impact. Coast. Eng. 2008, 55, 753–760. [Google Scholar] [CrossRef]
- Chen, W.; Fang, D.; Chen, G.; Jeng, D.; Zhu, J.; Zhao, H. A simplified quasi-static analysis of wave-induced residual liquefaction of seabed around an immersed tunnel. Ocean Eng. 2018, 148, 574–587. [Google Scholar] [CrossRef]
- Chen, W.Y.; Liu, C.L.; Duan, L.L.; Qiu, H.M.; Wang, Z.H. 2D Numerical study of the stability of trench under wave action in the immersing process of tunnel element. J. Mar. Sci. Eng. 2019, 7, 57. [Google Scholar] [CrossRef]
- CCCC Second Flight Engineering Survey & Design Institute Co., Ltd. (CCCC SFES & DI). Geological Investigation Report on Immersed Tunnel of Hong Kong-Zhuhai-Macao Bridge in Construction Documents Design Phase; CCCC Second Flight Engineering Survey & Design Institute Co., Ltd.: Guangzhou, China, 2009. (In Chinese) [Google Scholar]
- Ye, J.; Jeng, D.S. Response of seabed to natural loading-waves and currents. J. Eng. Mech. ASCE 2012, 138, 601–613. [Google Scholar] [CrossRef]
- Wen, F.; Jeng, D.S.; Wang, J.H. Numerical modeling of response of a saturated porous seabed around an offshore pipeline considering non-linear wave and current interactions. Appl. Ocean Res. 2012, 35, 25–37. [Google Scholar] [CrossRef]
- Liao, C.C.; Jeng, D.-S.; Lin, Z.; Guo, Y.; Zhang, Q. Wave (current)-induced pore pressure in offshore deposits: A coupled finite element model. J. Mar. Sci. Eng. 2019, 6, 83. [Google Scholar] [CrossRef]
- Nayroles, B.; Touzot, G.; Villon, P. Generalizing the finite element method: Diffuse approximation and diffuse elements. Comput. Mech. 1992, 10, 307–318. [Google Scholar] [CrossRef]
- Belytschko, T.; Lu, Y.Y.; Gu, L. Element-free Galerkin methods. Int. J. Numer. Methods Eng. 1994, 37, 229–256. [Google Scholar] [CrossRef]
- Liu, G.R.; Gu, Y. A point interpolation method for two-dimensional solids. Int. J. Numer. Methods Eng. 2001, 50, 937–951. [Google Scholar] [CrossRef]
- Wang, J.; Liu, G.; Lin, P. Numerical analysis of biot’s consolidation process by radial point interpolation method. Int. J. Solids Struct. 2002, 39, 1557–1573. [Google Scholar] [CrossRef]
- Wang, J.; Liu, G. On the optimal shape parameters of radial basis functions used for 2-D meshless methods. Comput. Methods Appl. Mech. Eng. 2002, 191, 2611–2630. [Google Scholar] [CrossRef]
- Hardy, R.L. Theory and applications of the multiquadric-biharmonic method 20 years of discovery 1968–1988. Comput. Math. Appl. 1990, 19, 163–208. [Google Scholar] [CrossRef]
- Powell, M. The theory of radial basis function approximation in 1990, Advances in Numerical Analysis II: Wavelets, Subdivision, and Radial Functions (WA Light, ed.). Oxf. Univ. Press. Oxf. 1992, 105, 210. [Google Scholar]
- Kansa, E.J. Multiquadrics—A scattered data approximation scheme with applications to computational fluid-dynamics—II solutions to parabolic, hyperbolic and elliptic partial differential equations. Comput. Math. Appl. 1990, 19, 147–161. [Google Scholar] [CrossRef]
- Mai-Duy, N.; Tran-Cong, T. Indirect RBFN method with thin plate splines for numerical solution of differential equations. CMES Comput. Model. Eng. Sci. 2003, 4, 85–102. [Google Scholar]
- Šarler, B.; Perko, J.; Chen, C.S. Radial basis function collocation method solution of natural convection in porous media. Int. J. Numer. Methods Heat Fluid Flow 2004, 14, 187–212. [Google Scholar] [CrossRef]
- Wu, N.J.; Chang, K.A. Simulation of free-surface waves in liquid sloshing using a domain-type meshless method. Int. J. Numer. Methods Fluids 2011, 67, 269–288. [Google Scholar] [CrossRef]
- Kovacevic, I.; Poredos, A.; Sarler, B. Solving the Stefan problem with the radial basis function collocation method. Numer. Heat Transf. Part B Fundam. 2003, 44, 575–598. [Google Scholar] [CrossRef]
- Hardy, R.L. Multiquadric equations of topography and other irregular surfaces. J. Geophys. Res. 1971, 76, 1905–1915. [Google Scholar] [CrossRef]
- Lee, C.K.; Liu, X.; Fan, S.C. Local multiquadric approximation for solving boundary value problems. Comput. Mech. 2003, 30, 396–409. [Google Scholar] [CrossRef]
- Šarler, B.; Vertnik, R. Meshfree explicit local radial basis function collocation method for diffusion problems. Comput. Math. Appl. 2006, 51, 1269–1282. [Google Scholar] [CrossRef]
- Kosec, G.; Sarler, B. Local RBF collocation method for Darcy flow. Comput. Model. Eng. Sci. 2008, 25, 197–208. [Google Scholar]
- Tsai, C.C.; Lin, Z.H.; Hsu, T.W. Using a local radial basis function collocation method to approximate radiation boundary conditions. Ocean Eng. 2015, 105, 231–241. [Google Scholar] [CrossRef]
- Kosec, G.; Založnik, M.; Šarler, B.; Combeau, H. A meshless approach towards solution of macrosegregation phenomena. Comput. Mater. Contin. 2011, 22, 169–195. [Google Scholar]
- Wang, X.X.; Jeng, D.S.; Tsai, C.C. Meshfree model for wave-seabed interactions around offshore pipelines. J. Mar. Sci. Eng. 2019, 7, 87. [Google Scholar] [CrossRef]
- Higuera, P.; Lara, J.L.; Losada, I.J. Realistic wave generation and active wave absorption for Navier-Stokes models: Application to OpenFOAM. Coast. Eng. 2013, 71, 102–118. [Google Scholar] [CrossRef]
- Qi, W.G.; Gao, F.P. Physical modelling of local scour development around a large-diameter monopile in combined waves and current. Coast. Eng. 2014, 83, 72–81. [Google Scholar] [CrossRef]
- Ahmad, N.; Bihs, H.; Chella, M.A.; Arntsen, Ø.A.; Aggarwal, A. Numerical modelling of arctic coastal erosion due to breaking waves impact using REEF3D. In Proceedings of the 27th International Ocean and Polar Engineering Conference, International Society of Offshore and Polar Engineers, San Francisco, CA, USA, 25–30 June 2017. [Google Scholar]
- Nangia, N.; Patankar, N.A.; Bhalla, A.P.S. A DLM immersed boundary method based wave-structure interaction solver for high density ratio multiphase flows. arXiv 2019, arXiv:1901.07892. [Google Scholar] [CrossRef]
- De Jesus, M.; Lara, J.L.; Losada, I.J. Three-dimensional interaction of waves and porous coastal structures: Part I: Numerical model formulation. Coast. Eng. 2012, 64, 57–72. [Google Scholar] [CrossRef]
- Engelund, F. On the Laminar and Turbulent Flows of Ground Water through Homogeneous Sand; Akademiet for de Tekniske Videnskaber: København, Denmark, 1953. [Google Scholar]
- Burcharth, H.F.; Andersen, O.K. On the one-dimensional steady and unsteady porous flow equations. Coast. Eng. 1995, 24, 233–257. [Google Scholar] [CrossRef]
- Higuera, P. Application of Computational Fluid Dynamics to Wave Action on Structures. Ph.D. Thesis, Universidade de Cantabria, Cantabria, Spain, 2015. [Google Scholar]
- Zienkiewicz, O.C.; Chang, C.T.; Bettess, P. Drained, undrained, consolidating and dynamic behaviour assumptions in soils. Géotechnique 1980, 30, 385–395. [Google Scholar] [CrossRef]
- Biot, M.A. General theory of three-dimensional consolidation. J. Appl. Phys. 1941, 26, 155–164. [Google Scholar] [CrossRef]
- Bentley, J.L. Multidimensional binary search trees used for associative searchings. Commun. ACM 1975, 18, 509–517. [Google Scholar] [CrossRef]
- Li, X.S. An overview of SuperLU: Algorithms, implementation, and user interface. ACM Trans. Math. Softw. (TOMS) 2005, 31, 302–325. [Google Scholar] [CrossRef]
- Newmark, N.M. A method of computation for structural dynamics. J. Eng. Mech. Div. ASCE 1959, 85, 67–94. [Google Scholar]
- Ye, J.H.; Jeng, D.S.; Wang, R.; Zhu, C. Validation of a 2-D semi-coupled numerical model for fluid-structure-seabed interaction. J. Fluids Struct. 2013, 42, 333–357. [Google Scholar] [CrossRef]
- Zienkiewicz, O.C.; Chan, A.H.C.; Pastor, M.; Schrefler, B.A.; Shiomi, T. Computational Geomechanics with Special Reference to Earthquake Engineering; John Wiley and Sons: Hoboken, NJ, USA, 1999. [Google Scholar]
- Li, Z.; Jeng, D.S.; Zhu, J.F.; Zhao, H. Effects of principal stress rotation on the fluid-induced soil response in a porous seabed. J. Mar. Sci. Eng. 2019, 7, 123. [Google Scholar] [CrossRef]
- Hicher, P.Y. Elastic properties of soils. J. Geotech. Eng. 1996, 122, 641–648. [Google Scholar] [CrossRef]
- Le Mehaute, B. An Introduction to Hydrodynamics and Water Waves; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Zen, K.; Yamazaki, H. Oscillatory pore pressure and liquefaction in seabed induced by ocean waves. Soils Found. 1990, 30, 147–161. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Wave Characteristics | Value | Unit |
|---|---|---|
| Wave period (T) | 10 | s |
| Wave height (H) | 4 | m |
| Wavelength (L) | 142.355 | m |
| Water depth (d) | 30 | m |
| Soil Properties | Value | Unit |
| Poisson’s ratio () | 0.20 | - |
| Permeability () | m/s | |
| Porosity () | 0.42 | - |
| Degree of saturation () | 0.95 | - |
| Shear modulus (G) | Pa | |
| Density of soil particles () | 2650 | kg/m |
| Tunnel buried depth (b) | 0.5 | m |
| Modelling Parameters | Value | Unit |
| Number of KNN (K) | 9 | - |
| Shape factor (c) | 6 | - |
| Nodes number (x direction) | 2000 | - |
| Nodes number (z direction) | 400 | - |
| 0.5 | s | |
| Time steps in a period () | 20 | - |
| Wave Characteristics | Value | Unit |
|---|---|---|
| Wave period (T) | 8 or various | s |
| Wave height (H) | 2 or various | m |
| Water depth (d) | 30 or various | m |
| Soil Properties | Value | Unit |
| Poisson’s ratio () | 0.20 | - |
| Permeability () | m/s | |
| Porosity () | 0.42 | - |
| Degree of saturation () | 0.95 | - |
| Shear modulus (G) | Pa | |
| Tunnel buried depth (b) | 0.5 | m |
| Wave Characteristics | Value | Unit |
|---|---|---|
| Wave period (T) | 10 | s |
| Wave height (H) | 4 | m |
| Water depth (d) | 30 | m |
| Soil Properties | Value | Unit |
| Poisson’s ratio () | 0.20 | - |
| Permeability () | or various | m/s |
| Porosity () | 0.42 | - |
| Degree of saturation () | 0.925 or various | - |
| Shear modulus (G) | Pa | |
| Tunnel buried depth (b) | 0.5 | m |
| Wave Characteristics | Value | Unit |
|---|---|---|
| Wave period (T) | 10 | s |
| Wave height (H) | 4 | m |
| Water depth (d) | 35 | m |
| Current velocity () | −1.5 or various | m/s |
| Soil Properties | Value | Unit |
| Poisson’s ratio () | 0.20 | - |
| Permeability () | m/s | |
| Porosity () | 0.42 | - |
| Degree of saturation () | 0.95 | - |
| Shear modulus (G) | Pa | |
| Tunnel buried depth (b) | 0.5 | m |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, S.; Jeng, D.-S.; Tsai, C.-C. Response of a Porous Seabed around an Immersed Tunnel under Wave Loading: Meshfree Model. J. Mar. Sci. Eng. 2019, 7, 369. https://doi.org/10.3390/jmse7100369
Han S, Jeng D-S, Tsai C-C. Response of a Porous Seabed around an Immersed Tunnel under Wave Loading: Meshfree Model. Journal of Marine Science and Engineering. 2019; 7(10):369. https://doi.org/10.3390/jmse7100369
Chicago/Turabian StyleHan, Shuang, Dong-Sheng Jeng, and Chia-Cheng Tsai. 2019. "Response of a Porous Seabed around an Immersed Tunnel under Wave Loading: Meshfree Model" Journal of Marine Science and Engineering 7, no. 10: 369. https://doi.org/10.3390/jmse7100369
APA StyleHan, S., Jeng, D.-S., & Tsai, C.-C. (2019). Response of a Porous Seabed around an Immersed Tunnel under Wave Loading: Meshfree Model. Journal of Marine Science and Engineering, 7(10), 369. https://doi.org/10.3390/jmse7100369