Engineering Design Driven by Models and Measures: The Case of a Rigid Inflatable Boat


Abstract
1. Introduction
2. Materials and Methods
- In-lab experiments with the aim at investigating the behavior of fiberglass used in the boat manufacturing, by testing specimens in tensile, flexural and impact tests. Different mixtures of resins and glass reinforcements are also compared with the scope to select the best combinations of material properties.
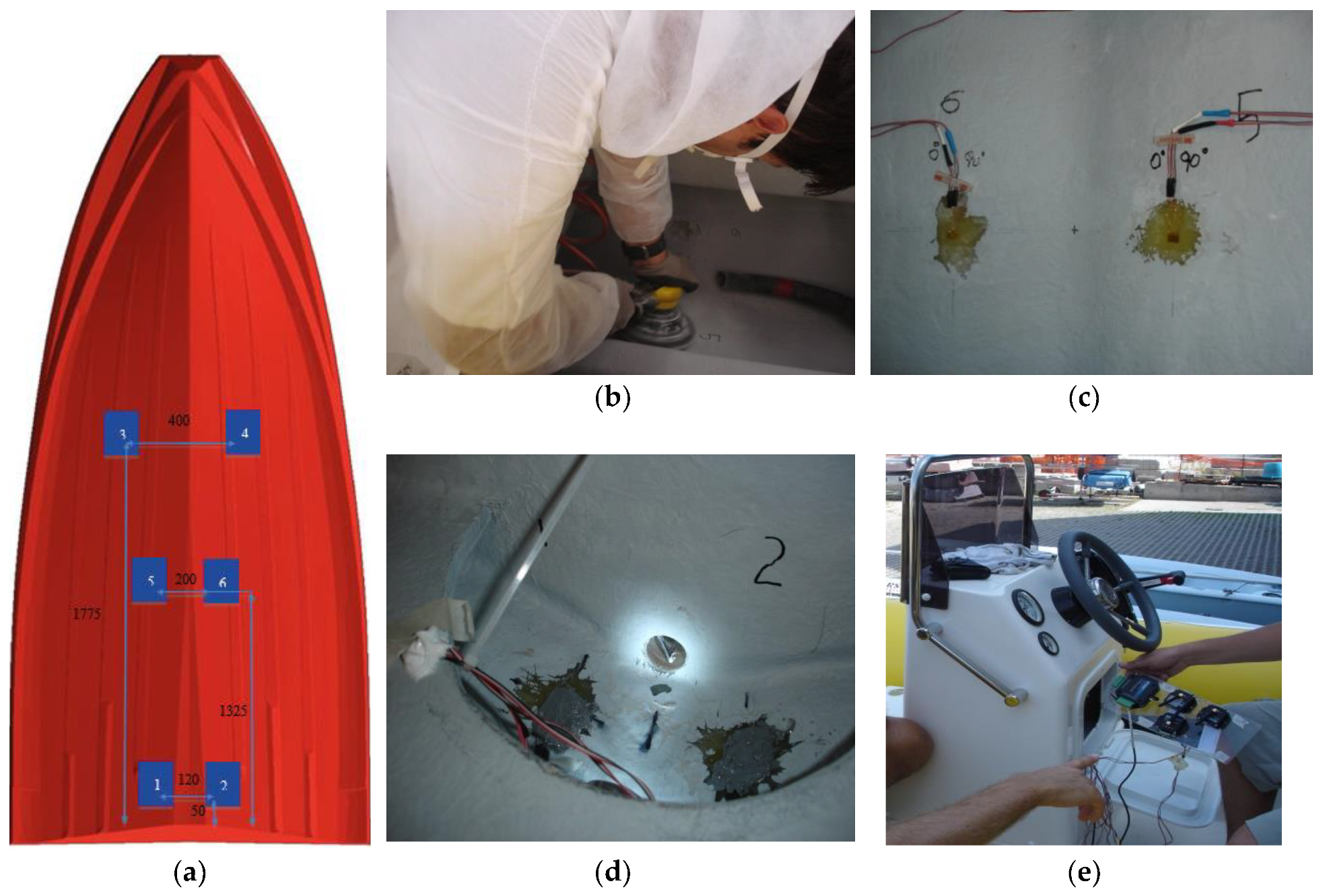
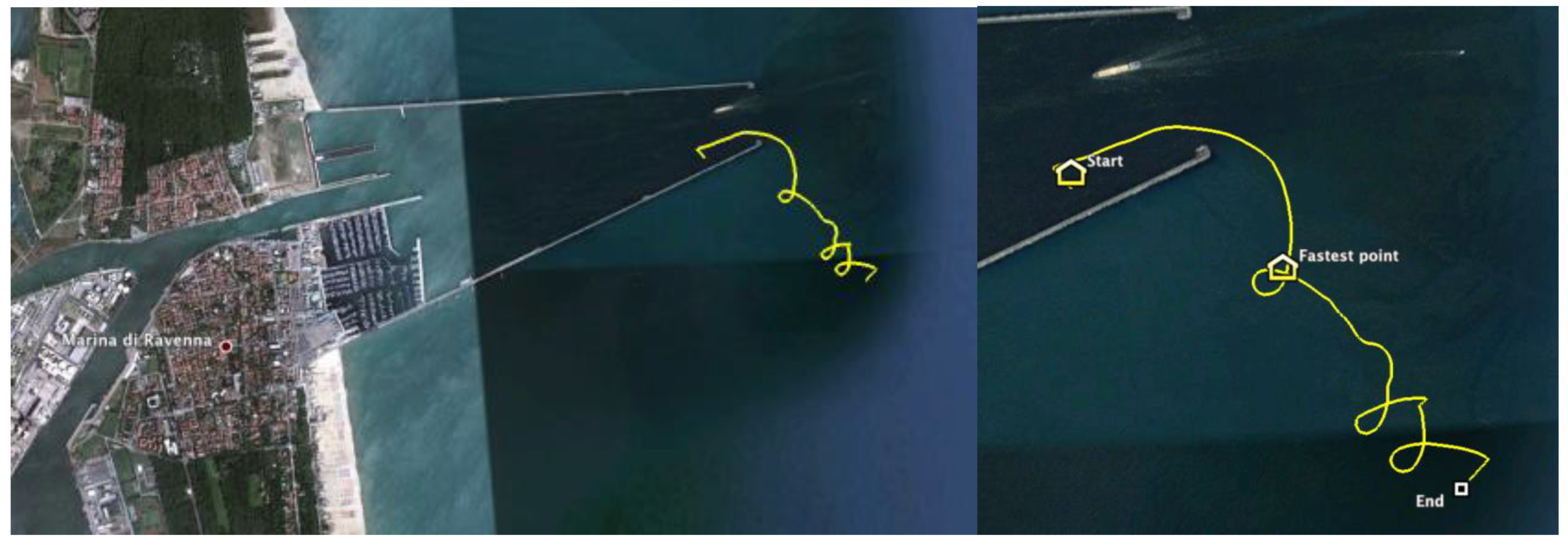
- In-field experiments, installing a network of sensors and instruments on the RIB for acquiring data during sailing: three outings on the sea in normal and extreme conditions, with the aim to evaluate the stresses and strains in a hull gliding through waves.
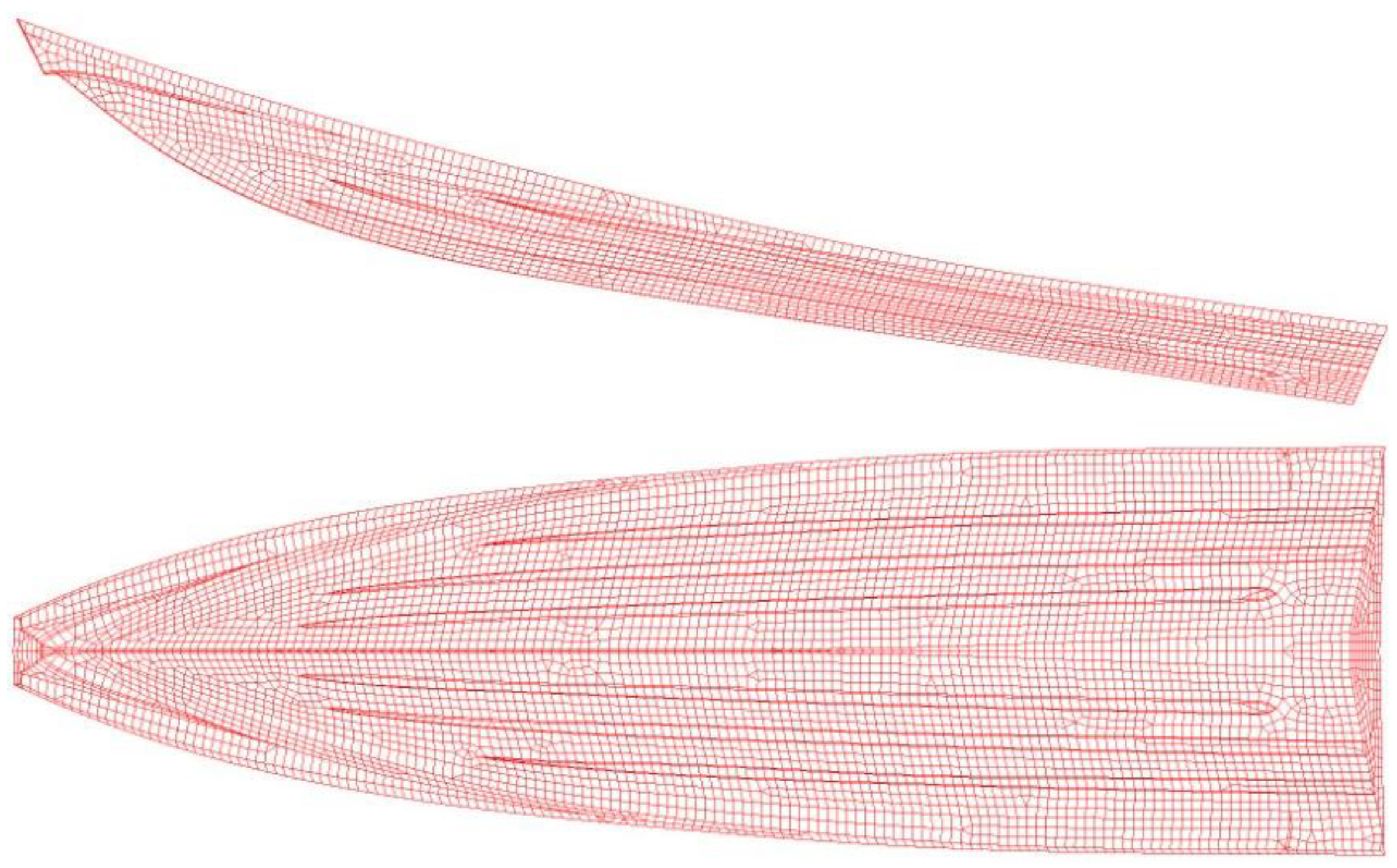
- Smoothed-particle hydrodynamics (SPH) numerical simulations combined with FEM with the scope to investigate the effect of waves motion and impact on ship structures.
2.1. In-Lab Experiments
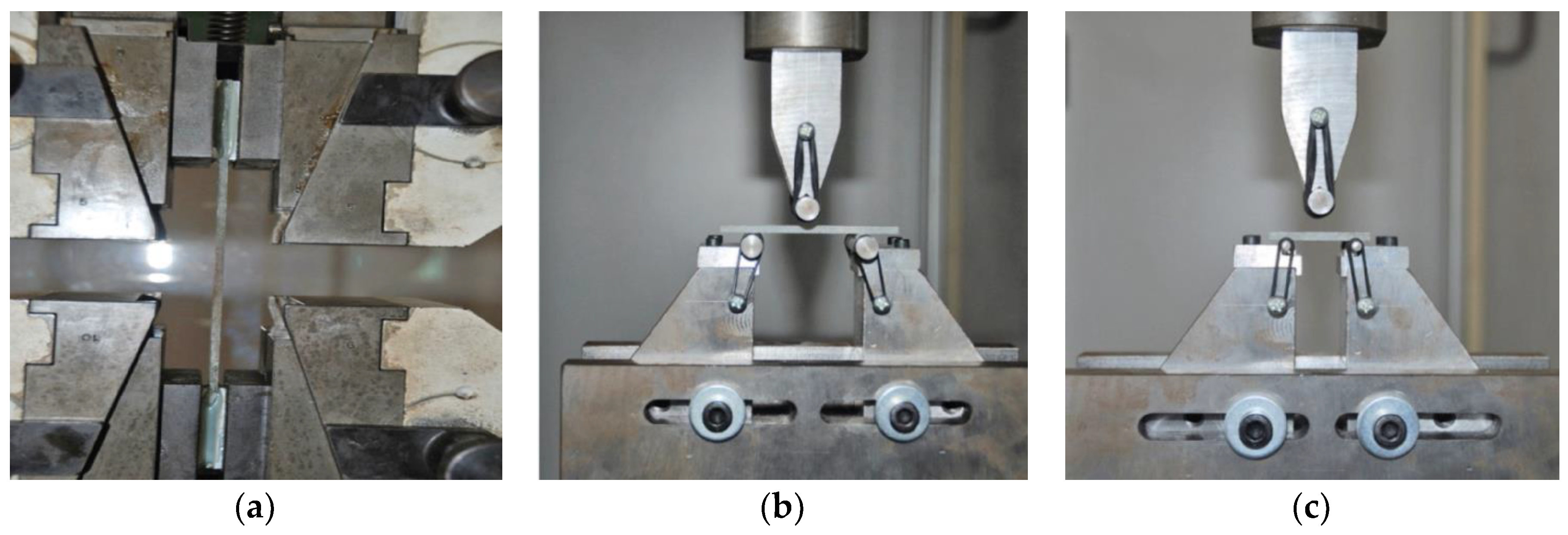
2.1.1. Tensile Tests
2.1.2. Flexural Tests
2.1.3. Interlaminar Shear Tests
2.2. In-Field Experiments
2.3. Numerical Simulations
3. Results
3.1. Material Properties
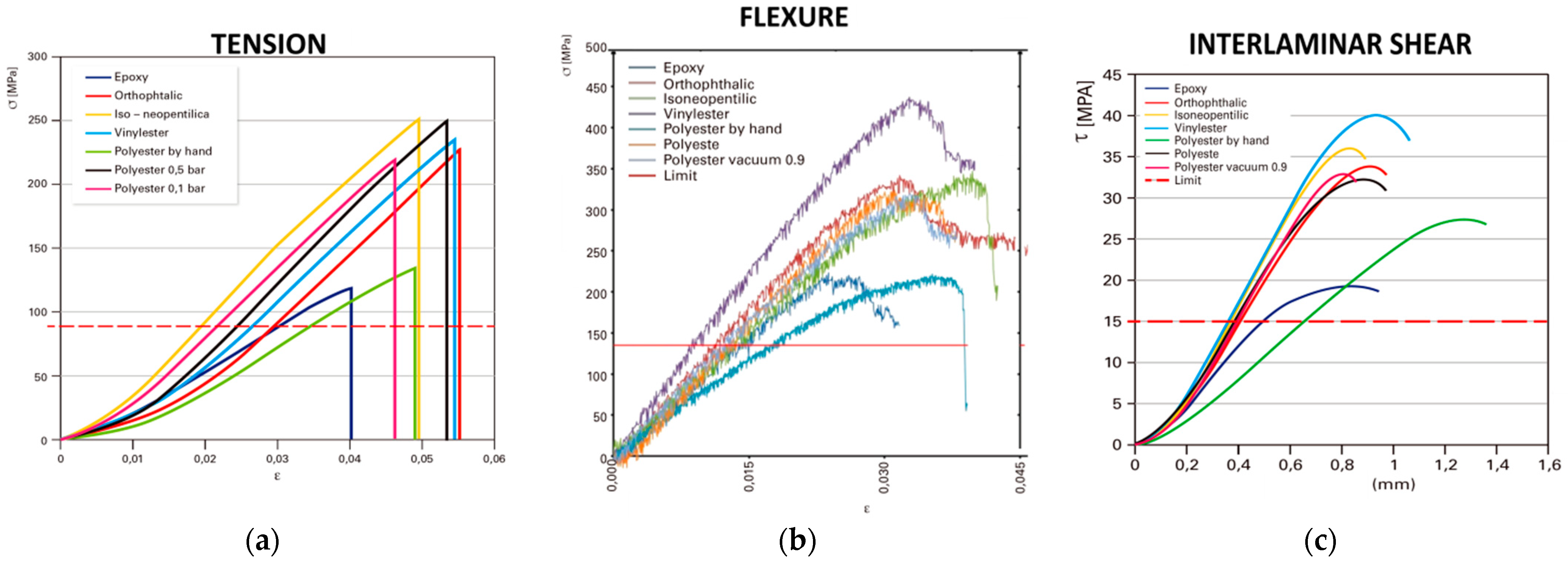
3.1.1. Tensile Properties
- -
- The standard requires tensile strength of 80 MPa which is amply satisfied by all the resin systems. As a practical result, all the materials and sequence of stratification under investigation are adequate for creating the strength laid down by the standard.
- -
- Almost all the resins showed an ultimate tensile stress of between 220 and 250 MPa with better characteristics for isoneopentilic and orthophthalic resins at 0.5 bar, while hand laminated polyester resin and epoxy resin had the worst performance.
- -
- For hand laminated polyester, this performance is due to the greater percentage of resin compared with fiber and to the presence of air porosity in the manual laminate compared with other techniques (VARTM).
- -
- Epoxy resin shows decidedly low values in relation to the problems illustrated in starting reticulation of the resin in the sample sheet.
3.1.2. Flexural Properties
- -
- The standard demands flexural strength of 135 MPa and a flexural modulus of 5200 MPa which is amply satisfied by all the resin systems; so they are all adequate for offering the strength specified by the standard.
- -
- Best resin: Vinylester, which has properties decidedly superior to the others but is more expensive; it is recommended for special or high-performance applications.
- -
- Hand laminated polyester and epoxy: these have the worst characteristics, but it must be underlined that the poor result of epoxy resin is linked to the fact that it was made at environmental temperature, normally epoxy resins have much better performance.
- -
- Others: they all show very similar behavior and are equivalent.
3.1.3. Interlaminar Shear Properties
- -
- the standard requires interlaminar shear resistance of 15 MPa which was largely satisfied by all the resin systems;
- -
- the best system is once again vinylester with performance decidedly better than that of the others. In this case, epoxy resin shows unusually low values for the partial reticulation of the sample sheet;
- -
- the remaining resins have similar behavior with a slight preference for isonepentilic resin.
3.2. Loads and Deformations
- -
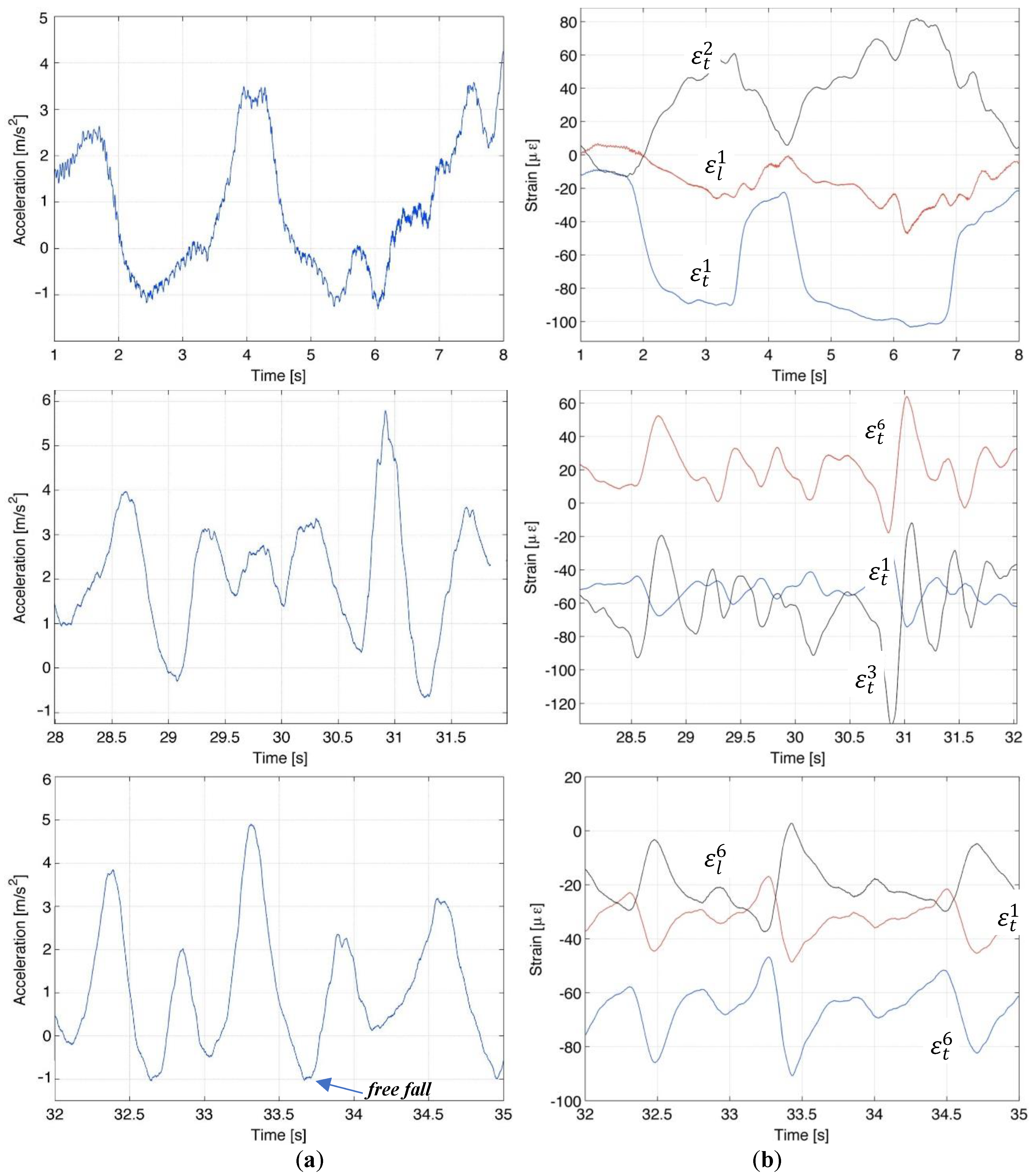
- There is a substantial correspondence in term of time-dependent trends between accelerations and strains. Slight differences are mainly related to the facts that: (a) the strain measure is influenced by all three components of the acceleration (while only one is displayed); (b) there is a little, but not null distance between the positions where accelerometer and strain-gauges are located. Same considerations have to be taken in count when comparing the time-depending trends measured by strain-gauges.
- -
- Acceleration has a maximum value of 6 m/s2 corresponding to peaks of strain of 120–140 μm.
- -
- Strain gauges symmetrically positioned (e.g., strain gauges 1 and 2) report anti-symmetric trends in strains (as in the case of and ). This anti-symmetry in the system is not complete since the external loads are not perfectly balanced with respect to the boat symmetry.
- -
- Longitudinal strains are significantly lower than transversal strains (e.g., and ). In addition, as in the case of , located at the rear of the boat, compression state during the acceleration is correctly detected.
- -
- Transversal strains improve from the stern to the blow (e.g., and ) but the maximum is located around the middle of the hull (e.g., ).
- -
- As the speed increases, the blows on the waves become more frequent, with accelerating peaks approaching, but also with less pronounced tendencies.
- -
- From time to time, there are some free fall phases, when the acceleration in descent is equivalent to the gravitational acceleration.
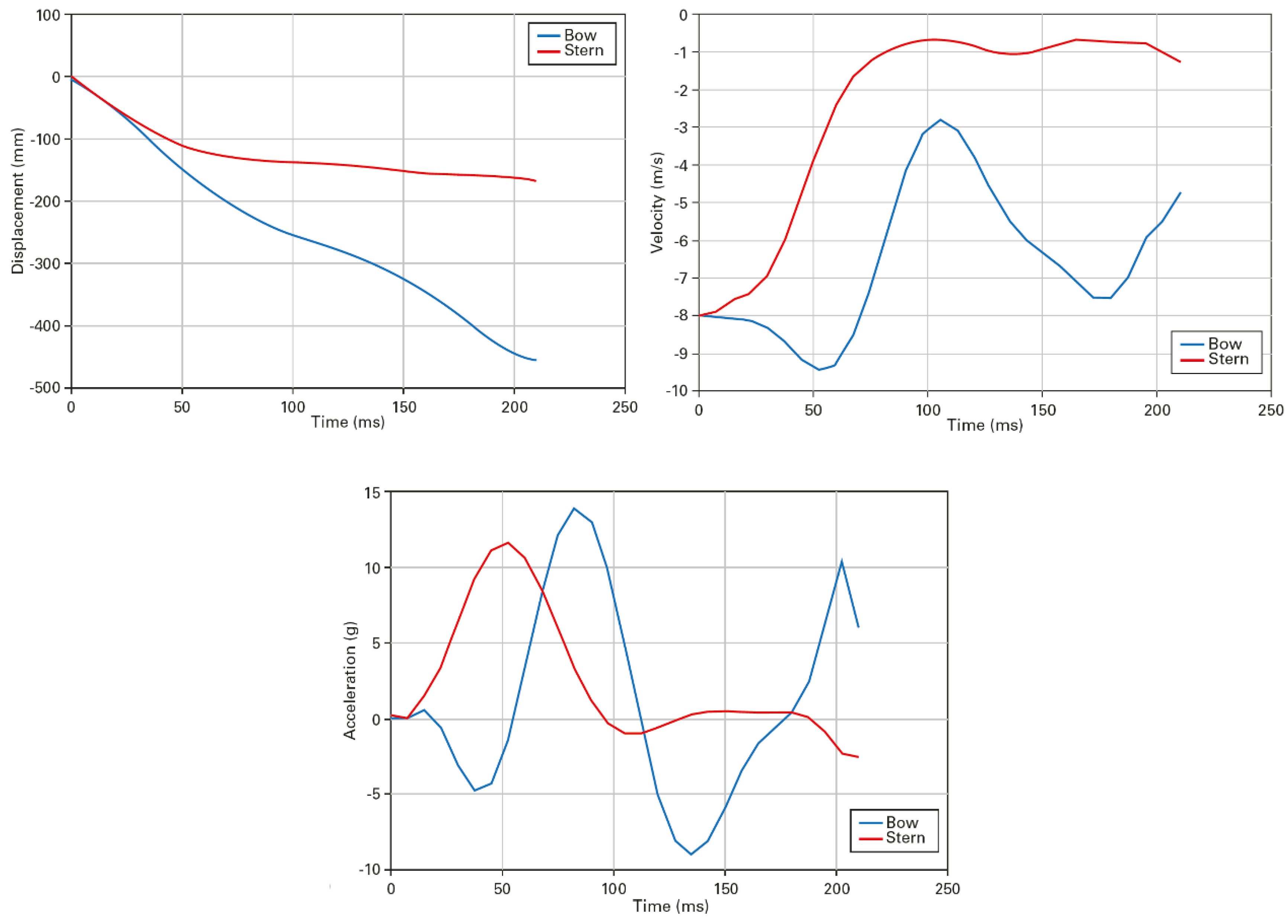
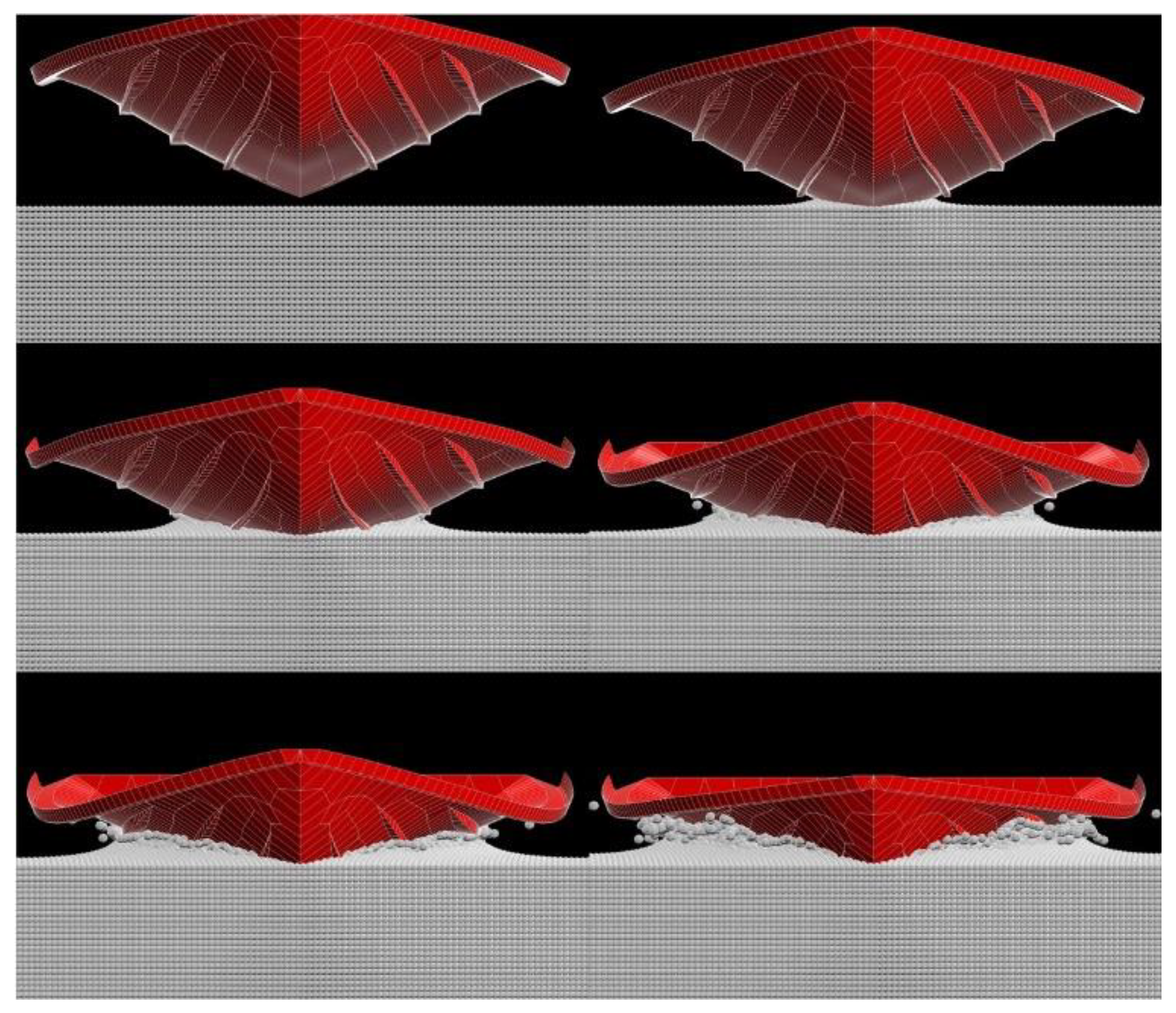
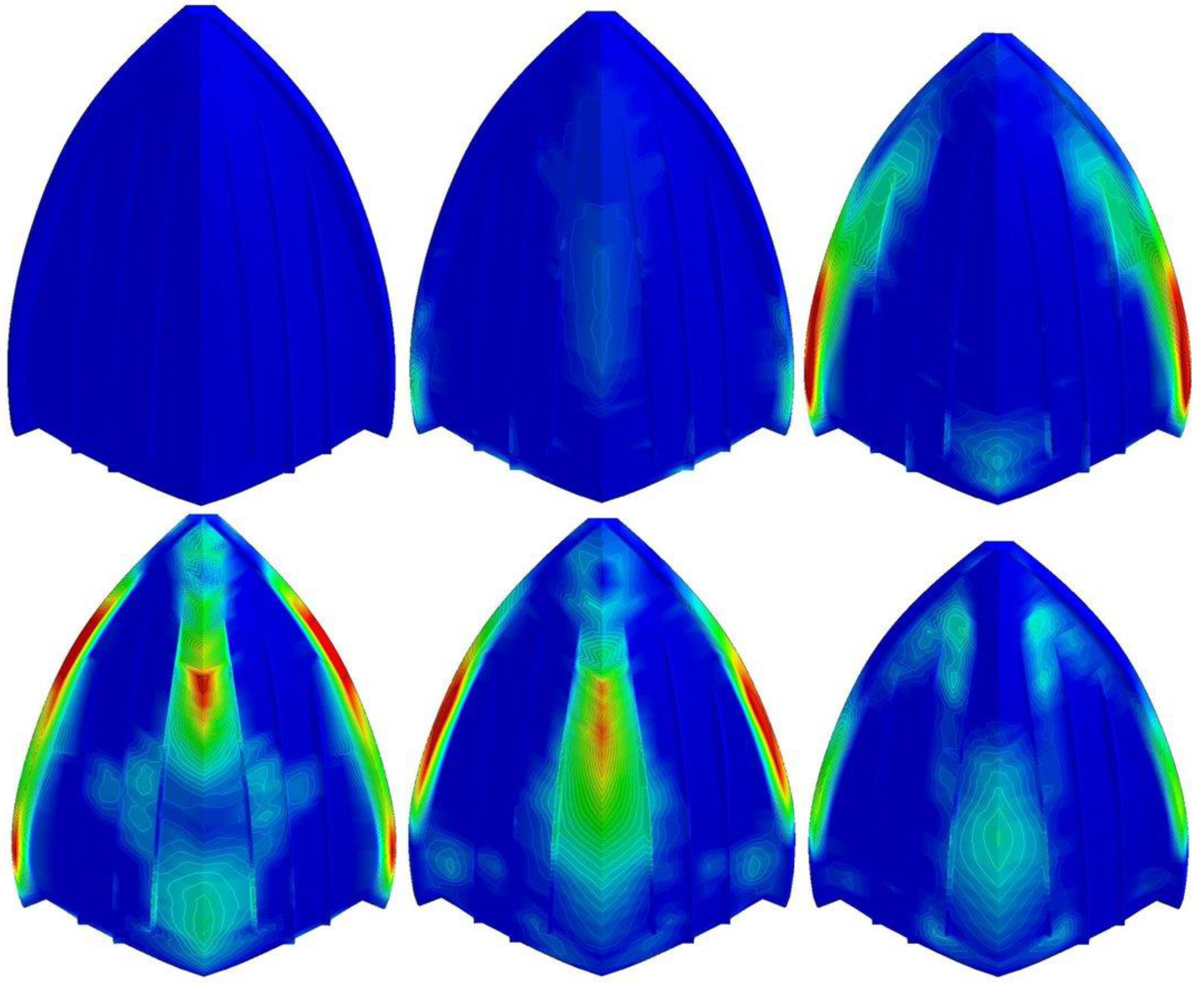
3.3. Numerical Predictions
4. Discussion and Conclusions
- -
- The epoxy system does not appear to be usable at typical temperatures for boat production.
- -
- There are significant differences in mechanical performances obtainable with advanced techniques compared with the classic manual methods.
Funding
Acknowledgments
Conflicts of Interest
References
- Pike, D. The Complete RIB Manual: The Definitive Guide to Design, Handling and Maintenance; A&C Black: London, UK, 2013. [Google Scholar]
- Salvesen, N.; Tuck, E.O.; Faltinsen, O. Ship motions and sea loads. SNAME Trans. 1970, 78, 250–287. [Google Scholar]
- Townsend, N.C.; Wilson, P.A.; Austen, S. What influences rigid inflatable boat motions? Proc. Inst. Mech. Eng. Part M 2008, 222, 207–217. [Google Scholar] [CrossRef]
- Versmissen, H.; Haasnoot, T. Rigid Inflatable Boats. In Handbook on Drowning. Task Force on Rescue–Rescue Techniques; Brewster, C.B., Brons, R.K., Eds.; Springer: Berlin, Germany, 2007; Volume 5, p. 264. [Google Scholar]
- Pollard, S.F. Boatbuilding with Aluminum: A Complete Guide for the Amateur and Small Shop, 2nd ed.; McGraw-Hill Professional: New York, NY, USA, 2006. [Google Scholar]
- Fragassa, C. From Design to Production: An integrated advanced methodology to speed up the industrialization of wooden boats. J. Ship Prod. Des. 2017, 33, 1–10. [Google Scholar] [CrossRef]
- Marsh, G. 50 years of reinforced plastic boats. Reinf. Plast. 2006, 50, 16–19. [Google Scholar] [CrossRef]
- Marsh, G. Composites boost patrol craft performance. Reinf. Plast. 2006, 50, 18–22. [Google Scholar] [CrossRef]
- De Paola, S.; Minak, G.; Fragassa, C.; Pavlovic, A. Green Composites: A Review of State of Art. In Proceedings of the 30th Danubia Adria Symposium on Advanced Mechanics, Primosten, Croatia, 25–28 September 2013; Croatian Society of Mechanics: Zagreb, Croatia, 2013; pp. 77–78. [Google Scholar]
- Hyseni, A.; De Paola, S.; Minak, G.; Fragassa, C. Mechanical Characterization of EcoComposites. In Proceedings of the 30th Danubia Adria Symposium on Advanced Mechanics, Primosten, Croatia, 25–28 September 2013; Croatian Society of Mechanics: Zagreb, Croatia, 2013; pp. 175–176. [Google Scholar]
- Fragassa, C.; Pavlovic, A.; Santulli, C. Mechanical and impact characterisation of flax and basalt fibre bio-vinylester composites and their hybrids. Compos. Part B Eng. 2018, 137, 247–259. [Google Scholar] [CrossRef]
- Zivkovic, I.; Fragassa, C.; Pavlovic, A.; Brugo, T. Influence of moisture absorption on the impact properties of flax, basalt and hybrid flax/basalt fiber reinforced green composites. Compos. Part B Eng. 2017, 111, 148–164. [Google Scholar] [CrossRef]
- Halswell, P.K.; Wilson, P.A.; Taunton, D.J.; Austen, S. Hydroelastic inflatable boats: Relevant literature and new design considerations. Trans. R. Inst. Nav. Archit. Part B 2012, 154, B39–B49. [Google Scholar]
- Townsend, N.C.; Coe, T.E.; Wilson, P.A.; Shenoi, R.A. High speed marine craft motion mitigation using flexible hull design. Ocean Eng. 2012, 42, 126–134. [Google Scholar] [CrossRef]
- Hudson, D.A.; Turnock, S.R.; Lewis, S.G. Predicting motions of high-speed rigid inflatable boats: Improved wedge impact prediction. In Proceedings of the Ninth International Conference on Fast Sea Transportation (FAST2007), Shanghai, China, 23–27 September 2007; pp. 377–383. [Google Scholar]
- Wines, C. Stability and Safety Issues for High Speed Operation of Rigid Inflatable Boats. In Proceedings of the 11th International Conference on Fast Sea Transportation, Honolulu, HI, USA, 26–29 September 2011; pp. 844–849. [Google Scholar]
- Payne, P.R. The vertical impact of a wedge on a fluid. Ocean Eng. 1981, 8, 421–436. [Google Scholar] [CrossRef]
- Von Kármán, T.H. The Impact of Seaplane Floats during Landing; TN No. 321; National Advisory Committee on Aeronautics (NACA): Washington, DC, USA, 1929.
- Schumann, B.; Ferraro, M.; Surendra, A.; Scanlan, J.P.; Fangohr, H. Better design decisions through operational modeling during the early design phases. J. Aerosp. Inf. Syst. 2014, 11, 195–210. [Google Scholar] [CrossRef]
- Jones, A.T. Design Space Exploration and Optimization Using Modern Ship Design Tools. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2014. [Google Scholar]
- Savitsky, D. Hydrodynamic design of planing hulls. Mar. Technol. 1964, 1, 71–96. [Google Scholar]
- Abrate, S. Hull slam. Appl. Mech. Rev. 2011, 64, 060803. [Google Scholar] [CrossRef]
- Ircani, A.; Martelli, M.; Viviani, M.; Altosole, M.; Podenzana-Bonvino, C.; Grassi, D. A simulation approach for planing boats propulsion and manoeuvrability. Trans. R. Inst. Nav. Archit. Part B 2016, 158, 27–42. [Google Scholar]
- Panciroli, R. Hydroelastic impacts of deformable wedges. In Dynamic Failure of Composite and Sandwich Structures; Abrate, S., Castanié, B., Rajapakse, Y., Eds.; Springer: New York, NY, USA, 2013; pp. 1–45. [Google Scholar]
- Almeter, J.M. Resistance prediction of planing hulls: State of the art. A comparison of empirical vs. computational planing models. Mar. Technol. 1993, 30, 297–307. [Google Scholar]
- Lee, F.J.; Wilson, P.A. Experimental study of the slamming in a modern racing yacht. J. Sailboat Technol. 2010, 1, 1–28. [Google Scholar]
- Hobbs, M.; Manganelli, P. Measurement of accelerations and keel loads on canting keel race yachts. In Proceedings of the RINA International Conference—Modern Yacht, Southampton, UK, 11–12 October 2007; pp. 115–121. [Google Scholar]
- Riley, M.R. A Deterministic Approach for Characterizing Wave Impact Response Motions of a High-Speed Planing Hull; NSWCCD-23-TM-2012/05; Naval Surface Warfare Center Carderock: West Bethesda, MD, USA, 2012.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Property | Standard | Threshold (MPa) |
|---|---|---|
| Tensile strength | ISO 527-1, ISO 527-4 | 80 |
| Tensile modulus | ISO 527-1, ISO 527-4 | 6350 |
| Flexural strength | ISO 178 | 135 |
| Flexural modulus | ISO 178 | 5200 |
| In-plane shear strength | ASTM D 4255 | 50 |
| Interlaminar shear strength | ISO 14130 | 15 |
| C (m/s) | S1 | S2 | S3 | ρ0 (Kg/m3) | γ |
|---|---|---|---|---|---|
| 1480 | 2.56 | 1.986 | 1.2268 | 1000 | 0.5 |
© 2019 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fragassa, C. Engineering Design Driven by Models and Measures: The Case of a Rigid Inflatable Boat. J. Mar. Sci. Eng. 2019, 7, 6. https://doi.org/10.3390/jmse7010006
Fragassa C. Engineering Design Driven by Models and Measures: The Case of a Rigid Inflatable Boat. Journal of Marine Science and Engineering. 2019; 7(1):6. https://doi.org/10.3390/jmse7010006
Chicago/Turabian StyleFragassa, Cristiano. 2019. "Engineering Design Driven by Models and Measures: The Case of a Rigid Inflatable Boat" Journal of Marine Science and Engineering 7, no. 1: 6. https://doi.org/10.3390/jmse7010006
APA StyleFragassa, C. (2019). Engineering Design Driven by Models and Measures: The Case of a Rigid Inflatable Boat. Journal of Marine Science and Engineering, 7(1), 6. https://doi.org/10.3390/jmse7010006