Free Surface Reconstruction for Phase Accurate Irregular Wave Generation



Abstract
1. Introduction
2. CFD Model
2.1. Overview of the Numerical Schemes
2.2. Free Surface Reconstruction
3. Results with the Free Surface Reconstruction Method
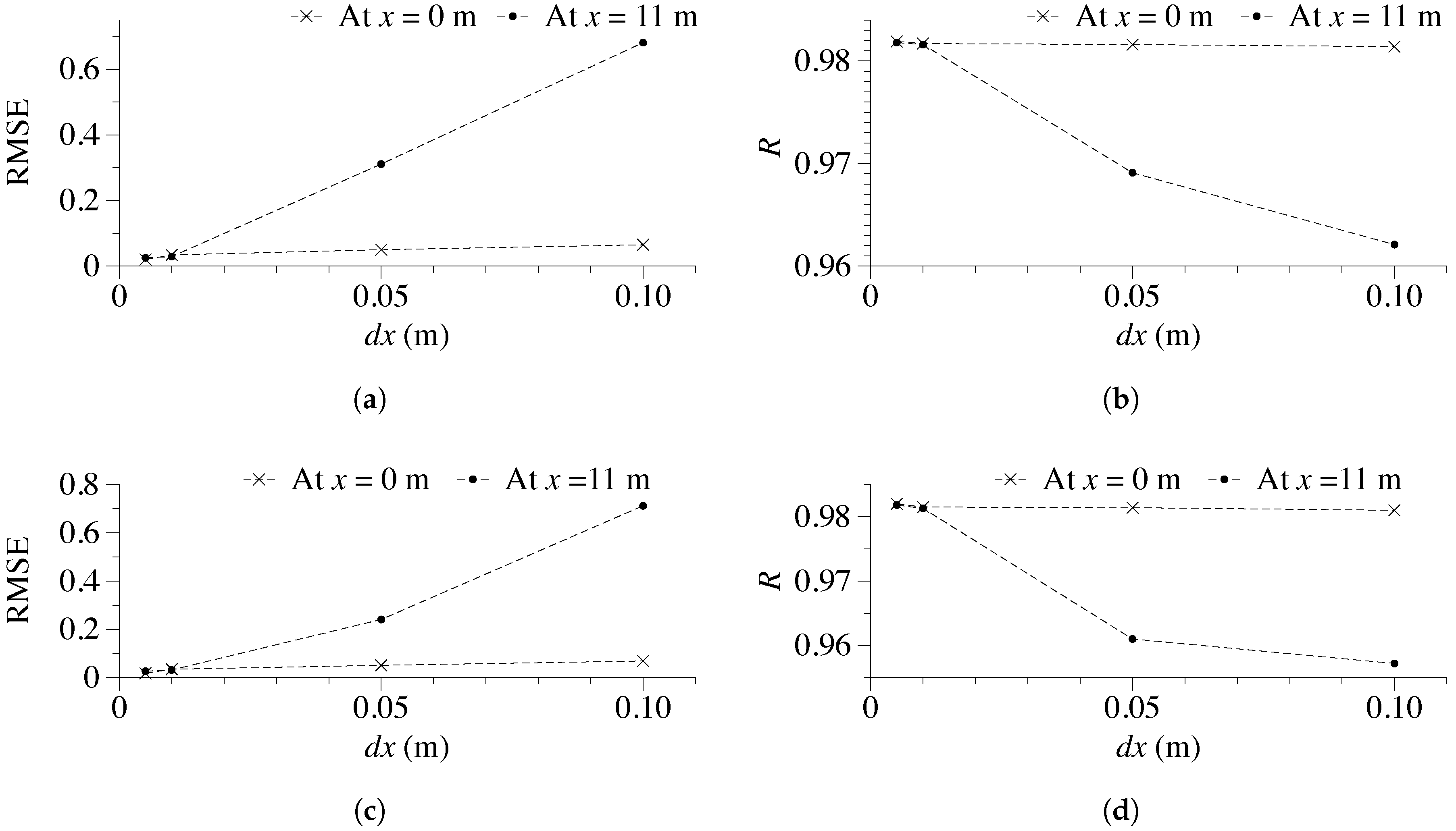
3.1. Grid Refinement Study with the Theoretical Input
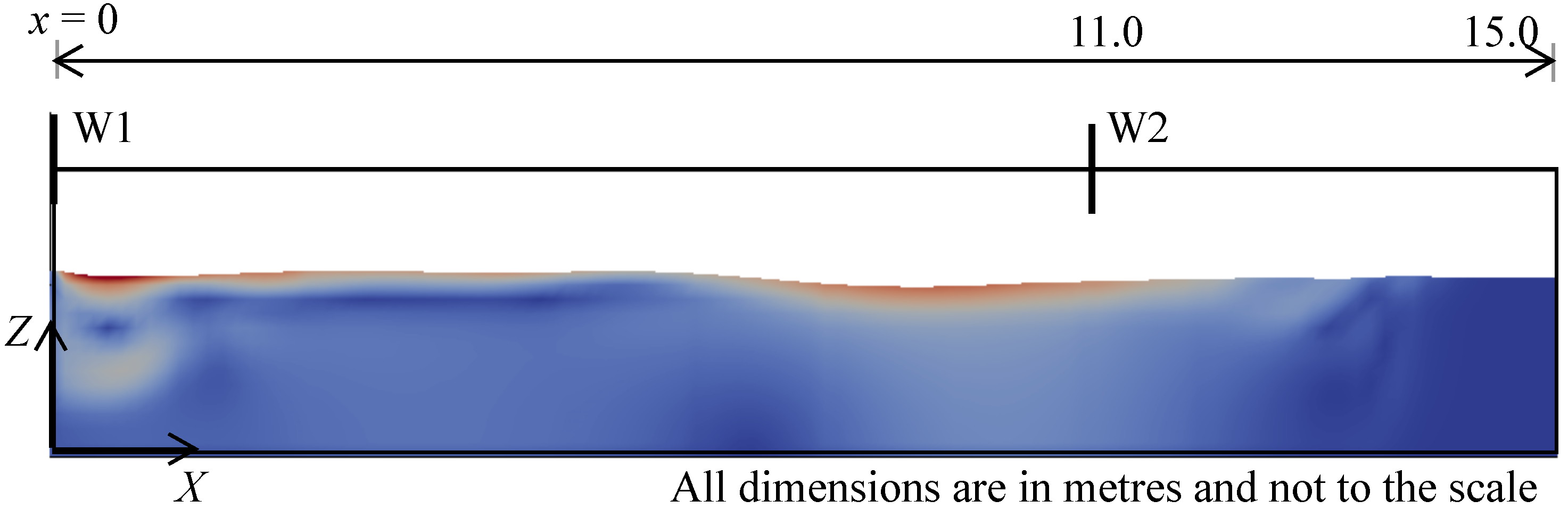
- Simulation 1: Irregular waves are numerically simulated with a given significant wave height and peak period in the numerical model using the random wave phases with the JONSWAP spectrum. The numerical free surface elevation is measured at the different wave gauge locations along the NWT (x = 0 m and 11 m).
- Simulation 2: Finally, the waves generated using the free surface reconstruction method (simulation 2) are compared with the waves generated using the wave spectrum in the time-domain (simulation 1).
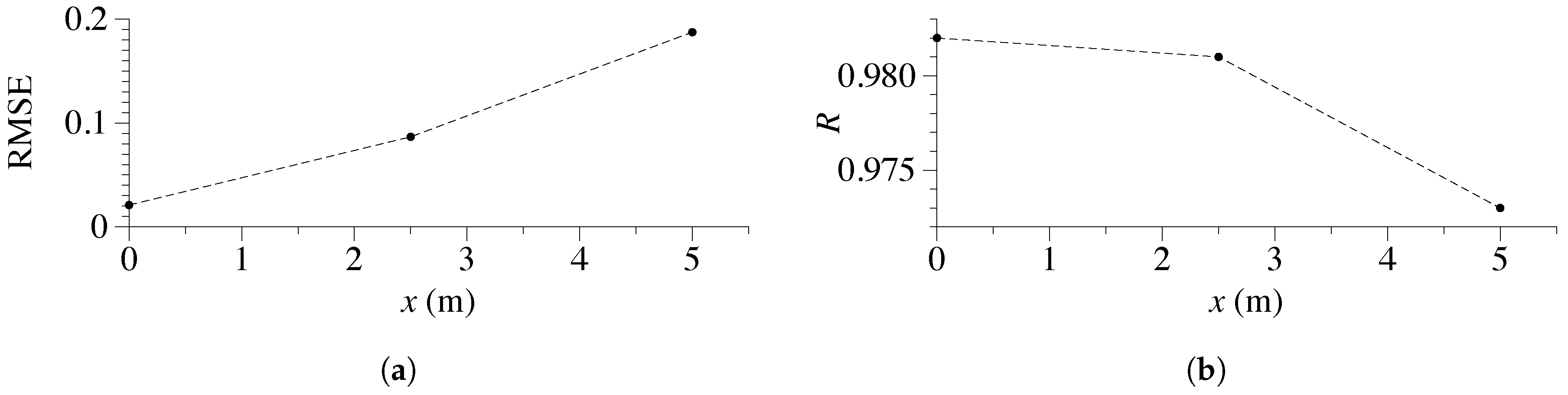
3.2. Breaking Irregular Waves over a Submerged Bar
- The wave amplitudes (), wave phases () and wave frequencies () are computed from the experimental free surface elevation at x = 6 m.
- With an assumption of linear dispersion between x = 0 m and 6 m (from the wave generation until the waves interact with the bar), the wave phases at x = 0 m () are computed by using the equation: , where x = −6 m.
- The computed wave phases , wave amplitudes () and wave frequencies () are used as inputs to the numerical model for the wave generation.
- The numerical free surface elevation is compared with the experimental free surface elevation at different wave gauge locations along the wave tank.
3.3. Irregular Waves with Large Spectral Steepness in Deep Water
3.4. Irregular Wave Forces on a Monopile
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Massel, R. Ocean Surface Waves: Their Physics and Prediction; World Scientific: Singapore, 1996. [Google Scholar]
- Thomas, J.; Dwarakish, S. Numerical wave modelling: A review. Aquat. Procedia 2015, 4, 443–448. [Google Scholar] [CrossRef]
- Eldeberky, Y.; Battjes, A.J. Nonlinear coupling in waves propagating over a bar. Coast. Eng. 1994. [Google Scholar] [CrossRef]
- Hu, Z.Z.; Causon, D.M.; Mingham, C.G.; Qian, L. Numerical simulation of floating bodies in extreme free surface waves. Nat. Hazards Earth Syst. Sci. 1985, 11, 519–527. [Google Scholar] [CrossRef]
- Beji, S.; Battjes, J. Numerical simulation of nonlinear wave propagation over a bar. Coast. Eng. 1994, 23, 1–16. [Google Scholar] [CrossRef]
- Harlow, H.F.; Welch, E.J. Numerical calculation of time dependent viscous incompressible flow of fluid with free surface. Phys. Fluids 1965, 8, 2182–2165. [Google Scholar] [CrossRef]
- Lee, H.S.; Kwon, H.S. Wave profile measurement by wavelet transform. Ocean Eng. 2003, 30, 2313–2328. [Google Scholar] [CrossRef]
- West, B.J.; Brueckner, K.A.; Janda, R.S. A numerical method for surface hydrodynamics. J. Geophys. Res. 1987, 92, 11803–11824. [Google Scholar] [CrossRef]
- Dean, R.G. Stream function representation of nonlinear ocean waves. J. Geophys. Res. 1965, 70, 4561–4572. [Google Scholar] [CrossRef]
- Tromans, S.; Anaturk, R.A.; Hagemeijer, P. A new model for the kinematics of large ocean waves—Application as a design wave. In Proceedings of the First International Offshore and Polar Engineering Conference. International Society of Offshore and Polar Engineers, Edinburgh, UK, 11–16 August 1991. [Google Scholar]
- Massel, R. Wavelet analysis for processing of ocean surface wave records. Ocean Eng. 2001, 28, 957–987. [Google Scholar] [CrossRef]
- Kao, S. Governing equations and spectra for atmospheric motion and transports in frequency-wavenumber space. J. Atmos. Sci. 1968, 25, 32–38. [Google Scholar] [CrossRef]
- Kao, S.; Wendell, L. The kinetic energy of the large-scale atmospheric motion in wavenumber-frequency space: I. Northern hemisphere. J. Atmos. Sci. 1970, 27, 359–375. [Google Scholar] [CrossRef]
- Brandt, A.; Ramberg, S.E.; Shlesinger, F.M. Nonlinear Dynamics of Ocean Waves; World Scientific: Singapore, 1992. [Google Scholar]
- Kinsman, B. Wind Waves; Prentice-Hall: Eaglewood Cliffs, NJ, USA, 1965. [Google Scholar]
- Bendat, S.; Piersol, G. Random Data: Analysis and Measurement Procedures; Wiley-Interscience: New York, NY, USA, 1971. [Google Scholar]
- Svendsen, I. Physical modelling of water waves. In Physical Modelling in Coastal Engineering; AA Balkema: Rotterdam, The Netherlands, 1985; pp. 13–48. [Google Scholar]
- Lubin, P.; Vincent, S.; Abadie, S.; Caltagrione, J. Three-dimensional LES simulation of air entrainment under plunging breaking waves. Coast. Eng. 2006, 53, 631–655. [Google Scholar] [CrossRef]
- Christensen, E.D. LES simulation of spilling and plunging breakers. Coast. Eng. 2006, 53, 463–485. [Google Scholar] [CrossRef]
- Jacobsen, N.G.; Fuhrman, D.; Fredsøe, J. A wave generation toolbox for the open-source CFD library: OpenFoam®. Int. J. Numer. Methods Fluids 2012, 70, 1073–1088. [Google Scholar] [CrossRef]
- Alagan Chella, M.; Bihs, H.; Myrhaug, D. Characteristics and profile asymmetry properties of waves breaking over an impermeable submerged reef. Coast. Eng. 2015, 100, 26–36. [Google Scholar] [CrossRef]
- Alagan Chella, M.; Bihs, H.; Myrhaug, D.; Michael, M. Hydrodynamic characteristics and geometric properties of plunging and spilling breakers over impermeable slopes. Ocean Model. 2016, 103, 53–72. [Google Scholar] [CrossRef]
- Li, S.; Liu, X.; Yu, X.; Lai, Z. Numerical modelling of multi-directional irregular waves through breakwaters. Appl. Math. Model. 2000, 24, 551–574. [Google Scholar] [CrossRef]
- Aggarwal, A.; Alagan Chella, M.; Kamath, A.; Bihs, H.; Arntsen, Ø.A. Irregular Wave Forces on a Large Vertical Circular Cylinder. Energy Procedia 2016, 94, 504–516. [Google Scholar] [CrossRef]
- Lara, L.; Garcia, N.; Losada, J. RANS modelling applied to random wave interaction with submerged permeable structures. Coast. Eng. 2006, 53, 395–417. [Google Scholar] [CrossRef]
- Panchang, G.; Wei, G.; Pearce, R.; Briggs, J. Numerical simulation of irregular wave propagation over shoal. J. Waterw. Port Coast. Ocean Eng. 1990, 116, 324–340. [Google Scholar] [CrossRef]
- Paulsen, T.B.; Bredmose, H.; Bingham, B.H.; Schløer, S. Steep wave loads from irregular waves on an offshore wind turbine foundation: Computation and experiment. In Proceedings of the 32nd International Conference on Ocean, Offshore and Arctic Engineering, American Society of Mechanical Engineers, Nantes, France, 9–14 June 2013. [Google Scholar]
- Paulsen, T.B.; Bredmose, H.; Bingham, B.H. An efficient domain decomposition strategy for wave loads on surface piercing circular cylinders. Coast. Eng. 2014, 86, 57–76. [Google Scholar] [CrossRef]
- Bredmose, H.; Jacobsen, G.N. Breaking wave impacts on offshore wind turbine foundations: focused wave groups using CFD. In Proceedings of the 29th International Conference on Ocean, Offshore and Arctic Engineering, American Society of Mechanical Engineers, Shanghai, China, 6–11 June 2010. [Google Scholar]
- Bredmose, H.; Hunt-Ruby, A.; Jayaratne, R. The ideal flip-through impact: Experimental and numerical investigation. J. Eng. Math. 2010, 67, 115–136. [Google Scholar] [CrossRef]
- Goda, Y.; Suzuki, Y. Estimation of incident and reflected wave in random wave experiment. In Proceedings of the 15th International Conference on Coastal Engineering, Honolulu, HI, USA, 11–17 July 1976. [Google Scholar]
- Mansard, E.; Funke, E. The measurement of incident and reflected spectra using a least squares method. In Proceedings of the 17th International Conference on Coastal Engineering, Sydney, Australia, 23–28 March 1980. [Google Scholar]
- Buldakov, E.; Stagonas, D.; Simons, R. Extreme wave groups in a wave flume: controlled generation and breaking onset. Coast. Eng. 2017, 128, 75–83. [Google Scholar] [CrossRef]
- Bihs, H.; Kamath, A.; Alagan Chella, M.; Aggarwal, A.; Arntsen, Ø.A. A new level set numerical wave tank with improved density interpolation for complex wave hydrodynamics. Comput. Fluids 2016, 140, 191–208. [Google Scholar] [CrossRef]
- Bihs, H.; Kamath, A.; Alagan Chella, M.; Arntsen, Ø.A. Breaking-wave interaction with tandem cylinders under different impact scenarios. J. Waterw. Port Coast. Ocean Eng. 2016, 142, 04016005. [Google Scholar] [CrossRef]
- Alagan Chella, M.; Bihs, H.; Myrhaug, D.; Muskulus, M. Breaking solitary waves and breaking wave forces on a vertically mounted slender cylinder over an impermeable sloping seabed. J. Ocean Eng. Mar. Energy 2017, 3, 1–19. [Google Scholar] [CrossRef]
- Aggarwal, A.; Alagan Chella, M.; Kamath, A.; Bihs, H.; Arntsen, Ø.A. Numerical simulation of irregular wave forces on a horizontal cylinder. In Proceedings of the ASME 35th International Conference on Ocean, Offshore and Arctic Engineering, Busan, Korea, 19–24 June 2016. [Google Scholar]
- Beji, S.; Battjes, J. Experimental investigation of wave propagation over a bar. Coast. Eng. 1993, 19, 151–162. [Google Scholar] [CrossRef]
- Pákozdi, C.; Visscher, J.H.; Stansberg, C.; Fagertun, J. Experimental investigation of global wave impact loads in steep random seas. In Proceedings of the 25th International Ocean and Polar Engineering Conference, International Society of Offshore and Polar Engineers, Kona, HI, USA, 21–26 June 2015. [Google Scholar]
- Pákozdi, C.; Spence, S.; Fouques, S.; Thys, M.; Alsos, S.H.; Bachynski, E.E.; Bihs, H.; Kamath, A. Nonlinear wave load models for extra large monopiles. In Proceedings of the 1st International Offshore Wind Technical Conference, San Francisco, CA, USA, 4–7 November 2018. [Google Scholar]
- Jiang, G.S.; Peng, D. Weighted ENO schemes for Hamilton Jacobi equations. SIAM J. Sci. Comput. 2000, 21, 2126–2143. [Google Scholar] [CrossRef]
- Shu, C.; Gottlieb, S. Total variation diminishing Range Kutta schemes. Math. Comput. 1998, 67, 73–85. [Google Scholar]
- Griebel, M.; Dornseifer, T.; Neunhoeffer, T. Numerical Simulations in Fluid Dynamics; SIAM: Philadelphia, PA, USA, 1998. [Google Scholar]
- Wilcox, D. Turbulence Modeling for CFD; DCW Industries Inc.: La Canada, CA, USA, 1994. [Google Scholar]
- Durbin, P. Limiters and wall treatments in applied turbulence modeling. Fluid Dyn. Res. 2009, 41, 012203. [Google Scholar] [CrossRef]
- Osher, S.; Sethian, J.A. Fronts propagating with curvature- dependent speed: Algorithms based on hamilton-jacobi formulations. J. Comput. Phys. 1988, 79, 12–49. [Google Scholar] [CrossRef]
- Berthelsen, P.A.; Faltinsen, O.M. A local directional ghost cell approach for incompressible viscous flow problems with irregular boundaries. J. Comput. Phys. 2008, 227, 4354–4397. [Google Scholar] [CrossRef]
- Bihs, H.; Kamath, A. A combined level set/ghost cell immersed boundary representation for simulations of floating bodies. Int. J. Numer. Methods Fluids 2017, 83, 905–916. [Google Scholar] [CrossRef]
- Schaffer, A.H.; Klopman, G. Review of multidirectional active wave absorption methods. J. Waterw. Port Coast. Ocean Eng. 2000, 126, 88–97. [Google Scholar] [CrossRef]
- Kamath, A.; Alagan Chella, M.; Bihs, H.; Muskulus, M. CFD investigations of wave interaction with a pair of large tandem cylinders. Ocean Eng. 2015, 108, 734–748. [Google Scholar] [CrossRef]
- Ong, M.C.; Kamath, A.; Bihs, H.; Afzal, M.S. Numerical simulation of free-surface waves past two semi-submerged horizontal circular cylinders in tandem. Mar. Struct. 2017, 52, 1–14. [Google Scholar] [CrossRef]
- Grotle, E.L.; Bihs, H.; Æsøy, V. Experimental and numerical investigation of sloshing under roll excitation at shallow liquid depths. Ocean Eng. 2017, 138, 73–85. [Google Scholar] [CrossRef]
- Aggarwal, A.; Alagan Chella, M.; Bihs, H.; Pákozdi, C.; Petter, A.; Arntsen, O. CFD-based study of steep irregular waves for extreme wave spectra. Int. J. Offshore Polar Eng. 2017, 28, 164–170. [Google Scholar] [CrossRef]
- Ahmad, N.; Bihs, H.; Myrhaug, D.; Kamath, A.; Arntsen, Ø.A. Three-dimensional numerical modelling of wave-induced scour around piles in a side-by-side arrangement. Coast. Eng. 2018, 138, 132–151. [Google Scholar] [CrossRef]
- Hoffmann, J. MATLAB und Simulink; Addison Wesley Longman: Boston, MA, USA, 2009. [Google Scholar]
- Newland, D.E. Random Vibrations, Spectral and Wavelet Analysis; Longman Scientific & Technical: Harlow, UK, 1993. [Google Scholar]
- Dean, R.G.; Dalrymple, R.A. Water Wave Mechanics for Engineers and Scientists; World Scientific Publishing Co. Pte. Ltd.: Singapore, 2000. [Google Scholar]
- Ohyama, T.; Beji, S.; Nadaoka, K.; Battjes, A.J. Experimental verification of numerical model for nonlinear wave evolutions. J. Port Waterw. Coast. Ocean Eng. 1994, 120, 637–644. [Google Scholar] [CrossRef]
- Kamath, A.; Alagan Chella, M.; Bihs, H.; Arntsen, Ø.A. Energy transfer due to shoaling and decomposition of breaking and non-breaking waves over a submerged bar. Eng. Appl. Comput. Fluid Mech. 2017, 11, 450–466. [Google Scholar] [CrossRef]
- Mori, N.; Yasuda, T. Effects of high-order nonlinear wave–wave interactions on gravity waves. In Proceedings of the Rogue Waves 2000: Proceedings of a Workshop, Brest, France, 29–30 November 2000; pp. 229–244. [Google Scholar]
- Torsethaugen, K. Model for Double Peaked Wave Spectrum; SINTEF Report STF22 A96204; SINTEF: Trondheim, Norway, 1996. [Google Scholar]
- Shirani, E.; Jafari, A.; Ashgriz, N. Turbulence models for flows with free surfaces and interfaces. AIAA J. 2006, 44, 1454–1462. [Google Scholar] [CrossRef]
- Mishra, A.A.; Girimaji, S.S. Toward approximating non-local dynamics in single-point pressure–strain correlation closures. J. Fluid Mech. 2017, 811, 168–188. [Google Scholar] [CrossRef]
- Oliver, T.A.; Moser, R.D. Bayesian uncertainty quantification applied to RANS turbulence models. J. Phys. Conf. Ser. 2011, 318, 042032. [Google Scholar] [CrossRef]
- Iaccarino, G.; Mishra, A.A.; Ghili, S. Eigenspace perturbations for uncertainty estimation of single-point turbulence closures. Phys. Rev. Fluids 2017, 2, 024605. [Google Scholar] [CrossRef]
- Ferreira, V.; Mangiavacchi, N.; Tomé, M.; Castelo, A.; Cuminato, J.; McKee, S. Numerical simulation of turbulent free surface flow with two-equation k–ε eddy-viscosity models. Int. J. Numer. Methods Fluids 2004, 44, 347–375. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | Sim. No. | Significant Wave Height (m) | Peak Period (s) | Steepness s | Grid Size (m) |
|---|---|---|---|---|---|
| A | 1 | 0.04 | 1.2 | 0.0178 | 0.10 |
| 2 | 0.05 | ||||
| 3 | 0.01 | ||||
| 4 | 0.005 | ||||
| B | 1 | 0.08 | 1.2 | 0.0356 | 0.10 |
| 2 | 0.05 | ||||
| 3 | 0.01 | ||||
| 4 | 0.005 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aggarwal, A.; Pákozdi, C.; Bihs, H.; Myrhaug, D.; Alagan Chella, M. Free Surface Reconstruction for Phase Accurate Irregular Wave Generation. J. Mar. Sci. Eng. 2018, 6, 105. https://doi.org/10.3390/jmse6030105
Aggarwal A, Pákozdi C, Bihs H, Myrhaug D, Alagan Chella M. Free Surface Reconstruction for Phase Accurate Irregular Wave Generation. Journal of Marine Science and Engineering. 2018; 6(3):105. https://doi.org/10.3390/jmse6030105
Chicago/Turabian StyleAggarwal, Ankit, Csaba Pákozdi, Hans Bihs, Dag Myrhaug, and Mayilvahanan Alagan Chella. 2018. "Free Surface Reconstruction for Phase Accurate Irregular Wave Generation" Journal of Marine Science and Engineering 6, no. 3: 105. https://doi.org/10.3390/jmse6030105
APA StyleAggarwal, A., Pákozdi, C., Bihs, H., Myrhaug, D., & Alagan Chella, M. (2018). Free Surface Reconstruction for Phase Accurate Irregular Wave Generation. Journal of Marine Science and Engineering, 6(3), 105. https://doi.org/10.3390/jmse6030105