1. Introduction
As marine resource exploration expands into deeper and more complex waters, Autonomous Underwater Vehicles (AUVs) have become indispensable tools in tasks such as seabed mapping, environmental monitoring, and subsea infrastructure inspection. The effective deployment of AUVs critically depends on accurate motion models that support reliable control, navigation, and fault-tolerant design, particularly under challenging conditions such as low-speed, large-pitch-angle maneuvers where conventional assumptions often fail [
1].
Under various operating conditions, AUVs exhibit more pronounced nonlinear and coupled behaviors during low-speed navigation, large-pitch-angle maneuvers, and vertical motion tasks. In such scenarios, limited thrust, drastic changes in hydrodynamic forces, and sensitivity to attitude stability introduce complex dynamic responses [
2]. Compared to horizontal-plane motion, vertical-plane motion is characterized by stronger nonlinearities, more complex hydrodynamic coupling, and greater parameter variability. Therefore, developing vertical-plane modeling strategies tailored to such conditions is essential for accurately capturing the underlying dynamics of the vehicle. However, in complex environments where incomplete state information and strong nonlinearities coexist, conventional modeling methods that rely on full-state observability are increasingly inadequate. Their limitations in terms of parameter identification accuracy and model generalization have prompted researchers to explore more efficient and robust identification techniques to meet real-world application challenges.
Current approaches for AUV dynamic modeling include numerical simulations, full-scale experiments, empirical formula-based methods, physics-based modeling, and system identification. Among these, numerical simulations based on computational fluid dynamics (CFD) have gained popularity for offering high-fidelity hydrodynamic data through direct solutions of governing equations [
3]. However, they are computationally expensive, time-consuming, and highly dependent on model accuracy, mesh generation, and boundary condition setup, which limit their applicability to real-time modeling and online control. Although full-scale experiments provide accurate results, they are costly and time-intensive. Empirical methods offer implementation simplicity but suffer from limited accuracy and reliance on manual parameter tuning [
4]. Mechanistic modeling can reveal underlying system dynamics but requires substantial computational resources and expert knowledge, hindering widespread adoption in engineering applications [
5].
In contrast, system identification—an essential component of modern control theory—has emerged as a mainstream technique for modeling underwater vehicles due to its simplicity, ease of implementation, and suitability for online applications [
6]. In this study, we propose a system identification framework based on a control autoregressive (CAR) model, which relies solely on pitch and depth measurements. This enables the accurate modeling of AUV vertical-plane dynamics under low-speed, high-pitch-angle conditions using low-cost, readily available sensors. To enhance identification accuracy under sparse or missing data conditions, we further develop a Multi-Innovation Least Squares (MILS) algorithm that leverages multiple past observations per iteration for improved robustness and data efficiency. The integration of system identification with experimental data has deepened in recent years, showing great promise in enhancing modeling accuracy and efficiency [
7].
Within the system identification framework, parameter identification plays a central role, aiming to accurately estimate critical parameters such as hydrodynamic coefficients and inertial properties under a known or assumed model structure. For AUVs, accurate parameter estimation is crucial for model fidelity and high-performance control. However, traditional identification methods typically rely on complete state observations, such as velocity and acceleration, which are difficult to obtain in complex underwater environments [
8]. Although such data provide rich dynamic information, their acquisition is challenged by several factors. First, high-end sensors such as precision inertial measurement units (IMUs) and Doppler velocity logs (DVLs) are often required, significantly increasing system cost and complexity. Second, sensor data quality may be compromised by noise and multipath effects, necessitating advanced data processing and filtering techniques [
9,
10,
11]. These issues frequently result in incomplete measurements, reducing the effectiveness of traditional parameter identification methods.
Recent research has increasingly focused on identifying system parameters under data-scarce conditions. For example, Albertos et al. proposed estimating missing historical data in input–output models to support parameter identification [
12]. Chen et al. developed an improved multistep gradient iteration method based on Kalman filtering for estimating parameters in autoregressive models with exogenous inputs (ARX) under missing observations [
13]. Liu et al. introduced a variational Bayesian approach to handle random data loss in switched finite impulse response (FIR) systems [
14].
The least squares (LS) algorithm, known for its unbiased estimation and high accuracy, has been widely used in parameter identification [
15]. However, LS has inherent limitations, such as high memory requirements and unsuitability for real-time applications. To address these drawbacks, the recursive least squares (RLS) algorithm was developed, enabling iterative parameter updates with reduced storage demand and real-time capability [
16]. Both LS and RLS offer high identification accuracy and are extensively applied in data-scarce scenarios. Further advancements have led to a variety of LS-based methods. For instance, Wu et al. proposed a multi-sensor fusion-based LS method, successfully applied to AUV hydrodynamic modeling in the Arctic; This method integrated online identification with motion control, enabling effective adaptation to ocean currents and external disturbances [
17]. Xu et al. introduced a data-driven nonlinear maneuvering model using the truncated least squares support vector machine (TLS-SVM) to estimate dimensionless hydrodynamic coefficients, providing not only parameter estimates but also uncertainty bounds to enhance model robustness [
18]. Yuan et al. utilized the least squares parameter estimation algorithm to identify the peak frequency of waves. By eliminating intermediate variables, the input–output expressions of the wave interference model were derived; Based on the obtained identification model, a recursive extended least squares identification algorithm based on an auxiliary model was developed to estimate the model parameters [
19]. Yu et al. derived a simplified third-order pitch dynamics identification model and then used a specialized recursive weighted least squares algorithm to complete the offline estimation of the concentrated hydrodynamic forces [
20].
Nevertheless, the RLS algorithm updates parameters using a single observation per iteration, leading to low data utilization and increased sensitivity to outliers. Its performance also degrades significantly when output data are missing, limiting its applicability in data-scarce systems. To overcome these issues, this study introduces multi-innovation theory and proposes a Multi-Innovation Least Squares (MILS) algorithm. Similarly to RLS, MILS supports online parameter identification but achieves higher estimation accuracy by flexibly incorporating multiple historical data points in each iteration, significantly improving data efficiency [
21,
22,
23]. This approach is particularly suited for scenarios where data are costly, sparse, or partially missing, enabling more accurate and robust parameter estimation under such constraints.
Despite the availability of various identification methods for data-scarce systems, missing observations often lead to a loss of critical dynamic information, introducing bias in parameter estimates [
24]. Moreover, the improper handling of missing data can significantly compromise model accuracy, affecting the reliability of parameter identification results and overall model integrity [
25].
To address these challenges, this study focuses on parameter identification of underwater vehicles during longitudinal maneuvers, particularly under high-dynamic conditions such as large-depth changes and substantial pitch adjustments, where traditional models often lack accuracy. Instead of relying on full-state observations, our method leverages only pitch and depth measurements obtained from low-cost sensors, which are stable and robust even in dynamic underwater environments. Pitch, in particular, offers valuable nonlinear information during large-angle motions. By carefully structuring the CAR model and integrating it with the proposed MILS algorithm, the approach captures essential motion characteristics even under sparse or partially missing data conditions.
To this end, this study establishes a parameter identification framework based on the control autoregressive (CAR) model, utilizing only pitch angle and depth data to estimate hydrodynamic coefficients and eliminate reliance on complex observation systems. In response to the limitations of traditional models in scenarios involving aggressive maneuvers or sparse data, a Multi-Innovation Least Squares (MILS) algorithm is proposed. By efficiently utilizing multiple historical data points, MILS enhances both data utilization and robustness, significantly improving parameter estimation accuracy under non-ideal observation conditions. Overall, the proposed CAR-MILS-based parameter identification approach demonstrates superior performance in handling challenges such as high dynamics, large pitch angles, and complex hydrodynamic variations, offering a reliable modeling foundation for the development of more adaptive control systems.
The main contributions of this paper are summarized as follows:
We develop a parameter identification framework tailored for vertical-plane AUV motion under low-speed and high-pitch conditions, requiring only pitch and depth data, which are accessible via low-cost, reliable sensors.
A novel Multi-Innovation Least Squares (MILS) algorithm is proposed to enhance parameter estimation accuracy by utilizing multiple past observations per iteration, thereby improving data efficiency and robustness in the presence of sparse or missing data.
Unlike conventional methods that rely on full-state observability or high-end inertial sensors, our approach offers a cost-effective, compact solution well suited for real-world field deployment and online control.
The effectiveness and generalizability of the proposed CAR-MILS method are validated through comprehensive simulations and field experiments involving large-angle AUV maneuvers.
The remainder of this paper is organized as follows:
Section 2 derives the CAR model of the AUV in the vertical plane.
Section 3 introduces the RLS algorithm.
Section 4 presents the proposed MILS algorithm.
Section 5 provides numerical simulation results, and
Section 6 reports the physical experimental results. Finally,
Section 7 concludes the paper.
5. Numerical Results
To validate the feasibility and effectiveness of the proposed identification method, a simulation experiment was conducted. Input and output data were generated based on Equation (1). The parameter estimates obtained by the MILS algorithm were then compared with those from the traditional Least Squares (LS) method, confirming the superior performance of MILS in parameter identification. For the simulation, the true values of the hydrodynamic parameters used are listed in
Table 1. All coefficients in
Table 1 are dimensionless.
Among them, set the initial speed
. Substituting the parameters from
Table 1 into Equations (2), (3), and (9) yields
Thus, its different form is
The corresponding parameters are identified, and their real values are
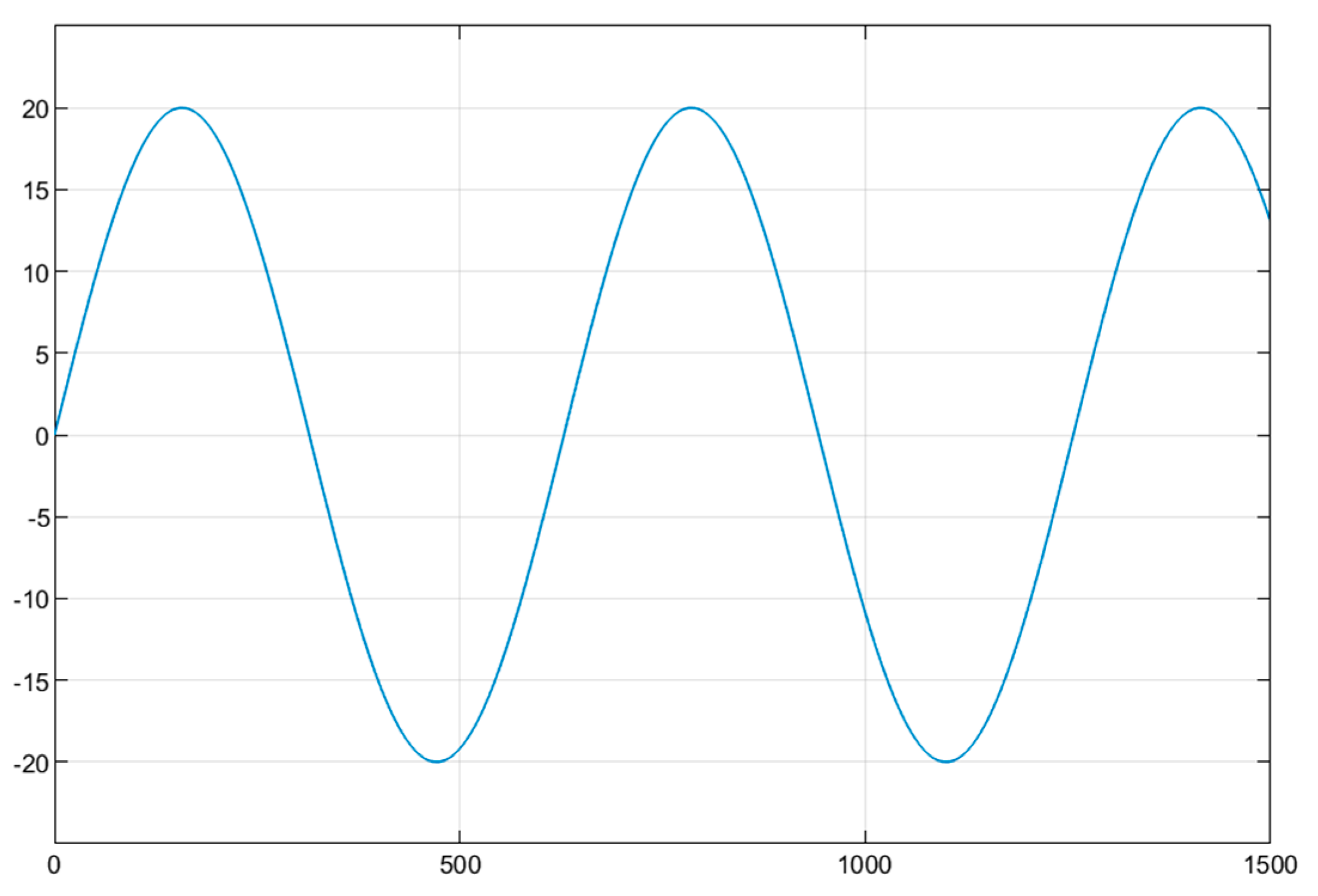
An open-loop simulation system was constructed using Matlab 2023b (Simulink). The simulation duration was set to 200 s, with an identification step h = 0.1 s and an initial motion speed
. To ensure the full excitation of the underwater vehicle, a sine function was chosen as the input for the rudder, as depicted in
Figure 1.
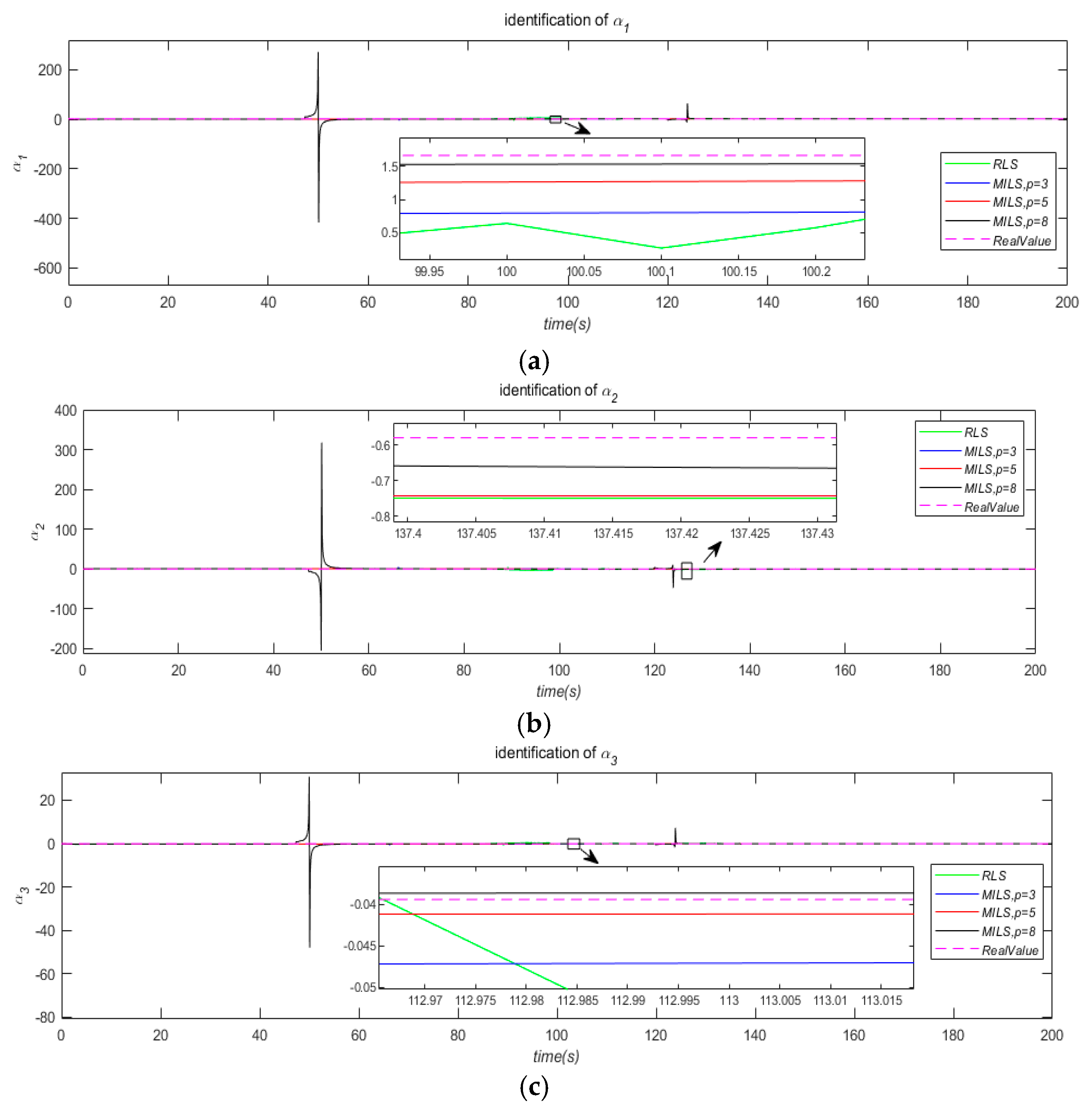
We conducted the parameter identification process based on LS and MILS algorithms, respectively. The estimated value of parameters
with a time variation curve is shown in
Figure 2, Subgraphs abc respectively represent the identification of parameters
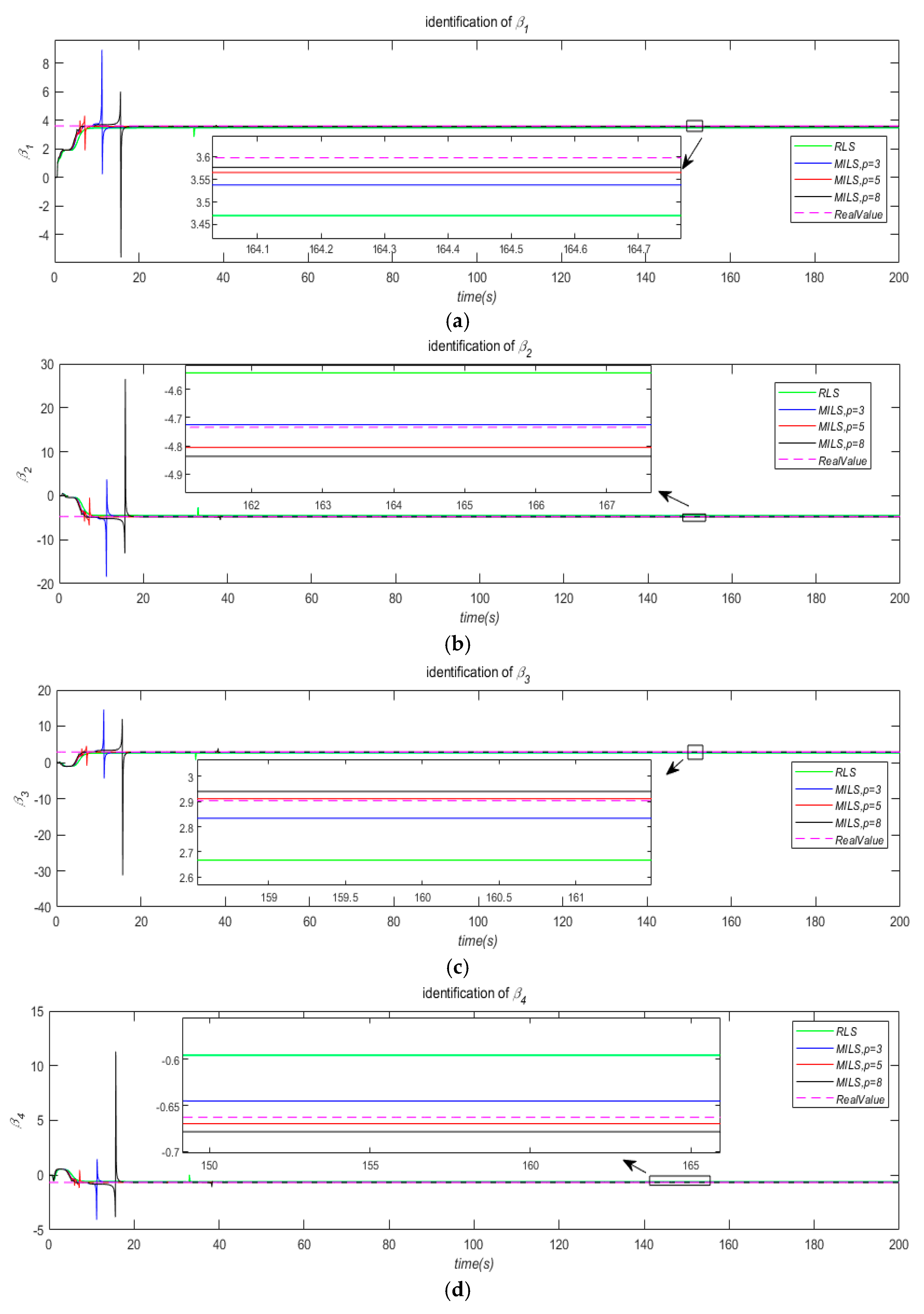
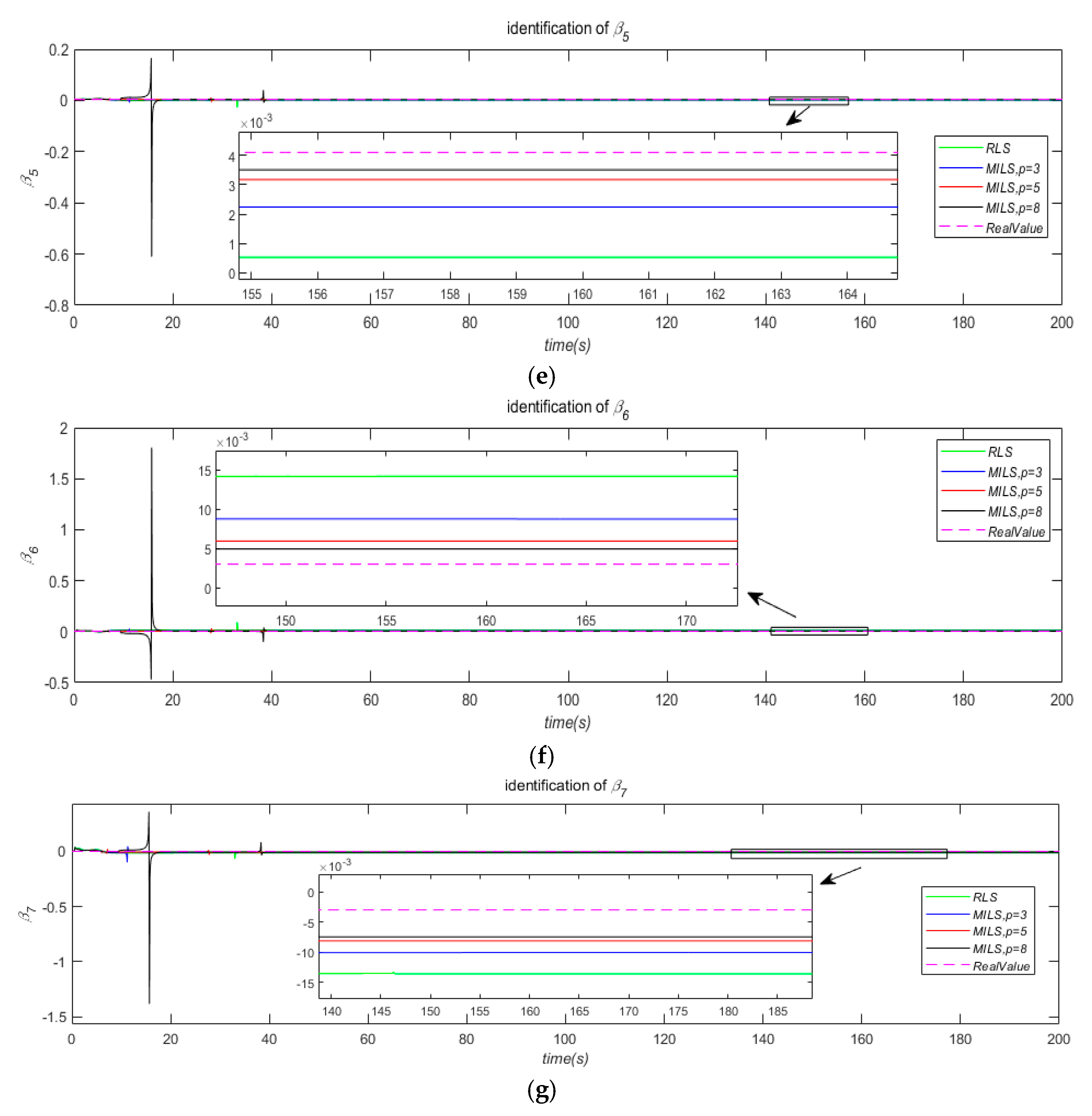
. The estimated value of parameters
with a time variation curve is shown in
Figure 3, Subgraphs a-g respectively represent the identification of parameters
.
The relative estimation error of the parameters is defined as follows:
where
e is the error,
is the estimated parameters, and
is the real parameters.
Regarding parameters
, their estimated values and errors based on LS are shown in
Table 2, and their estimated values and errors based on MILS (
p = 3, 5, 8) are shown in
Table 3.
The estimated values and errors of parameters
based on LS are shown in
Table 4, and their estimated values and errors based on MILS (
p = 3, 5, 8) are shown in
Table 5.
Because there are data saturation issues, we set a forget factor with 0.97 at the identification for with RLS and MILS. Therefore, the convergence speed of is much faster than . To avoid affecting the comparison between RLS and MILS, both set the same forget factor.
After analyzing
Figure 2 and
Figure 3 and
Table 2,
Table 3,
Table 4 and
Table 5, the following conclusion can be drawn: the convergence speed based on MILS is significantly faster than that based on RLS, and the identification accuracy of MILS is also higher than that of RLS. Overall, the larger the innovation length p of MILS, the faster the convergence speed and identification accuracy of its algorithm, which will also be correspondingly improved. However the innovation length of MILS is not necessarily better. For example, in
Table 5, the identification error of MILS with
p = 8 increases compared to
p = 5 because a larger innovation length means more complex calculations and is more prone to data saturation. Therefore, in practical applications, it is necessary to flexibly choose a reasonable innovation length.
To further verify the effectiveness of the identification algorithm, as shown in
Table 6, the parameter estimation values shown in Equation (2) can be calculated by the estimated values shown in
Table 2,
Table 3,
Table 4 and
Table 5 and Equation (10).
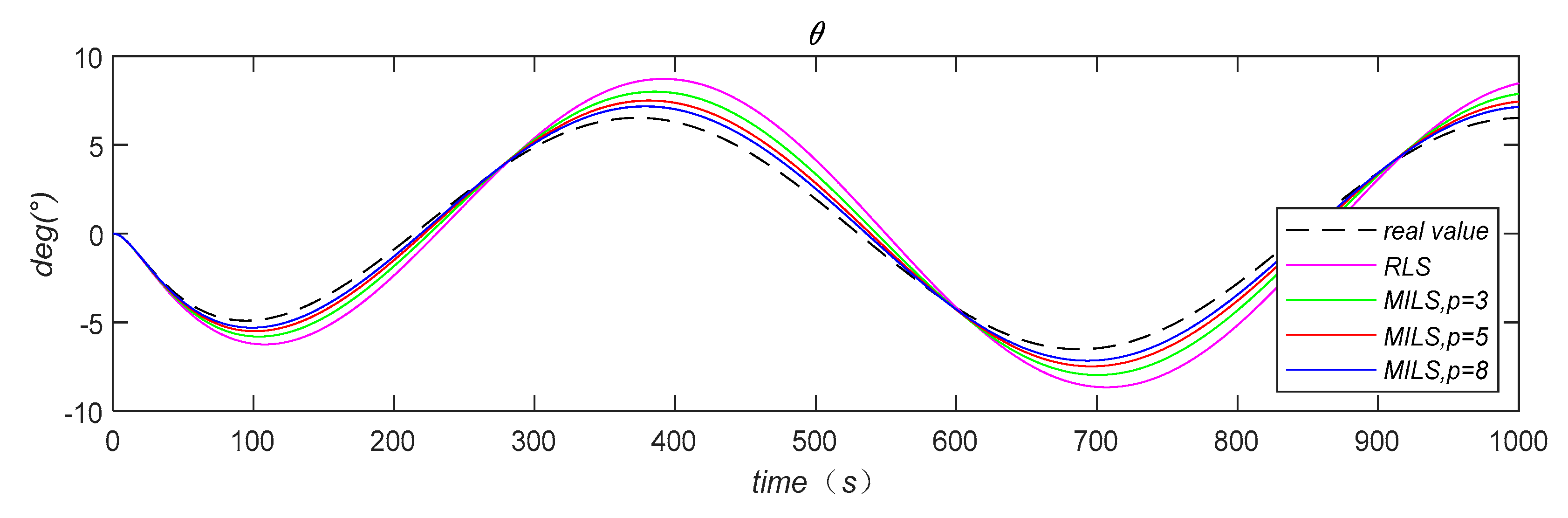
Substituting the estimated values of RLS and MILS shown in
Table 4 into Equation (2), using the same sine function shown in
Figure 1 as the input rudder, we perform a simulation to obtain the simulated pitch,
, and depth,
, as shown in
Figure 4 and
Figure 5, respectively.
The estimation error term in
Table 6 further confirms that the identification accuracy of MILS is much higher than that of RLS, and the larger the innovation length, the better the identification accuracy.
Figure 4 and
Figure 5 indicate that compared to RLS, the prediction results based on MILS identification are closer to the true values.
6. Physical Experiments
To further validate the practical applicability of the Multi-Innovation Least Squares (MILS) method in engineering practice, experimental data from full-scale sea trials of an Autonomous Underwater Vehicle (AUV) were utilized to identify a new dynamic model. The dimensions of the AUV’s rudder are shown in
Table 7. The motion data were collected during free-run experiments conducted in an external lake [
26]. Initially, a low-pass filtering algorithm was applied to the sea trial data to mitigate noise. Subsequently, a first-order model of the AUV’s vertical-plane dynamics was established, and its parameters were identified using the MSLS method. Finally, the identified model was evaluated through closed-loop simulation tests, with the simulated results compared against the measured data to assess model accuracy.
During straight-line motion in the lake, the AUV’s sway velocity remains approximately constant, while the heave velocity and yaw angle exhibit only small-amplitude perturbations. Consequently, higher-order hydrodynamic terms can be neglected, retaining only the first-order hydrodynamic coefficients. Based on the kinematic and dynamic characteristics of the AUV, a linear motion equation in the vertical plane is formulated.
Among them,
,
,
,
,
,
,
, and
are the hydrodynamic coefficients to be identified.
m and
represent the mass of the AUV and the moment of inertia about the Y-axis, respectively, as shown in
Table 5.
and
represent the rudder force coefficient and the rudder moment coefficient, respectively, calculated based on theoretical formulas.
Here, ρ denotes the density of the lake water, A is the rudder wing’s cross-sectional area, V is the cruising speed, is the lift coefficient, and represents the distance from the rudder to the coordinate origin.
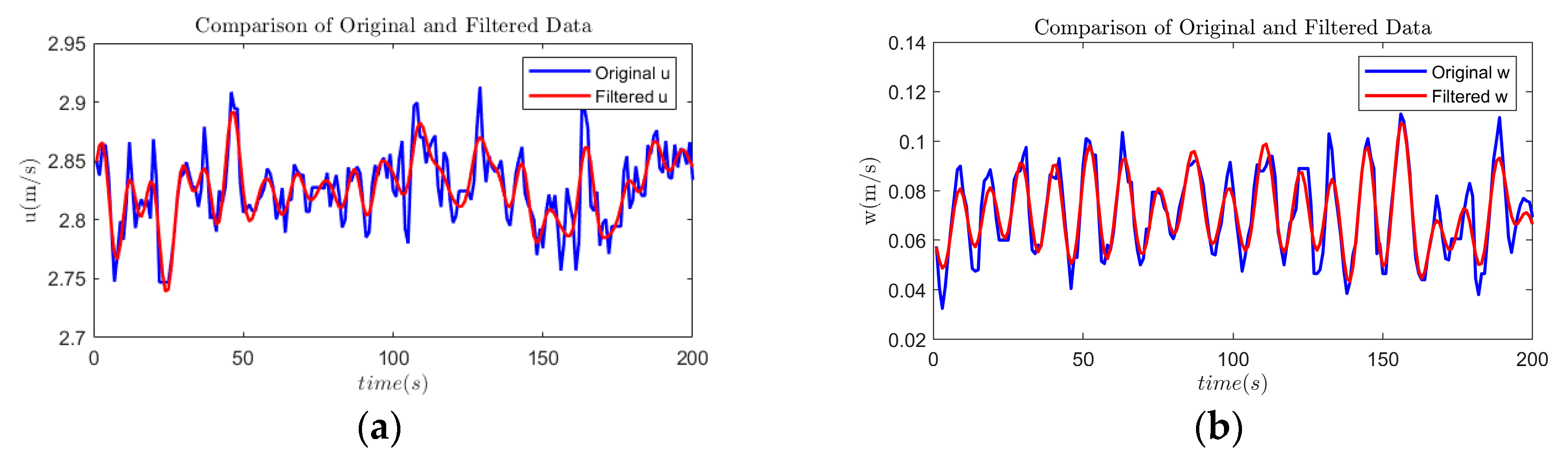
Considering that the measurement data contain noise, a noise term,
, is added to the right-hand side of the equation. Accordingly, the identification model established based on the identification algorithm can be expressed as
where
During the data sampling process, limitations in sensor measurement accuracy and disturbances caused by underwater water flow inevitably lead to data loss and the presence of outliers. As a result, the measured data contain significant noise interference. After removing outliers and corrupted data points, a low-pass filtering method is applied to further process the sampled data, effectively minimizing noise interference. The variables before and after noise reduction are illustrated in
Figure 6.
In the previous chapter, parameter identification for the underwater robot was carried out in a simulation environment, demonstrating the effectiveness and feasibility of the proposed Multiple Innovation Least Squares (MILS) algorithm. Building on this, the present chapter applies the MILS method to actual sea trial data from the AUV to further investigate parameter identification, with the aim of validating the MILS algorithm’s effectiveness in real-world underwater robot parameter estimation. During the identification process, an innovation length of
p = 8 was selected. The resulting parameter estimates are presented in
Figure 7.
After a certain number of iterations, the identification results of the hydrodynamic parameters converge to stable values. However, due to the complex noise interference inherent in the sea trial data, the convergence rate of parameter identification based on actual sea trial data is notably slower than that based on simulation data, and future work will focus on employing advanced filtering techniques and optimizing experimental conditions to improve convergence rates.
To verify the accuracy and effectiveness of the identified hydrodynamic coefficients, the coefficients were incorporated into the AUV’s linear motion equation in the vertical plane. Using this motion model, simulations of maneuvering motions in the horizontal plane were performed. To ensure reliable validation, the control inputs used in the simulations were kept consistent with those recorded in the sea trial data. The prediction results are shown in
Figure 8, and the final error calculations are recorded in
Table 8.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}