
Precise Tracking Control of Unmanned Surface Vehicles for Maritime Sports Course Teaching Assistance

Abstract
1. Introduction
1.1. Related Works
1.2. Contributions and Organization
- (1)
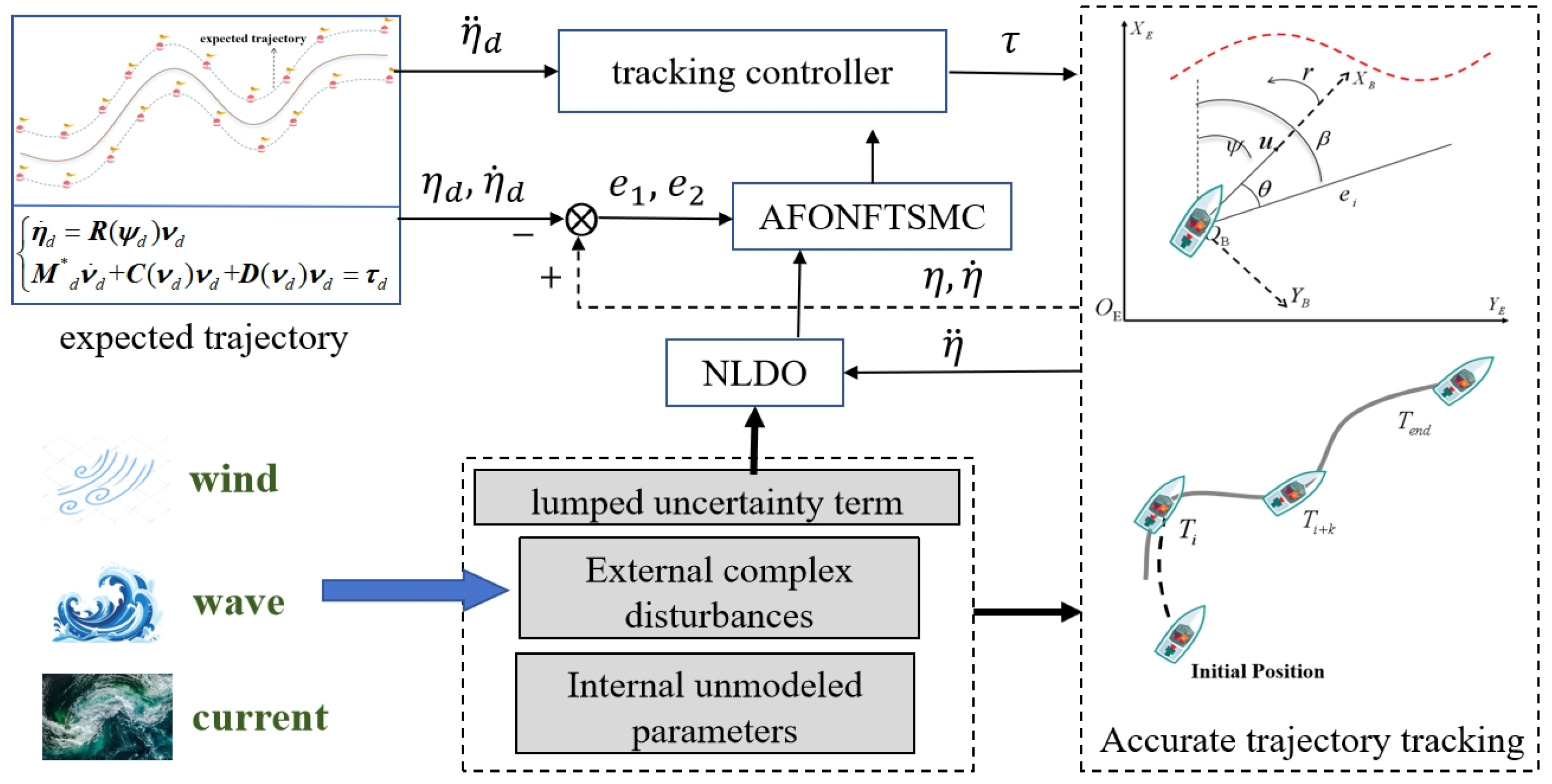
- An adaptive fractional-order nonsingular fast terminal sliding mode control (AFONFTSMC) algorithm is proposed, which integrates fractional-order calculus with nonsingular fast terminal sliding mode control (NFTSMC). This approach eliminates the singularity problem inherent to conventional sliding mode control while leveraging fractional-order dynamics to enhance convergence speed and tracking accuracy. Additionally, an adaptive mechanism dynamically estimates the upper bounds of system uncertainties and disturbances, reducing the reliance on precise mathematical models and improving robustness in complex marine environments.
- (2)
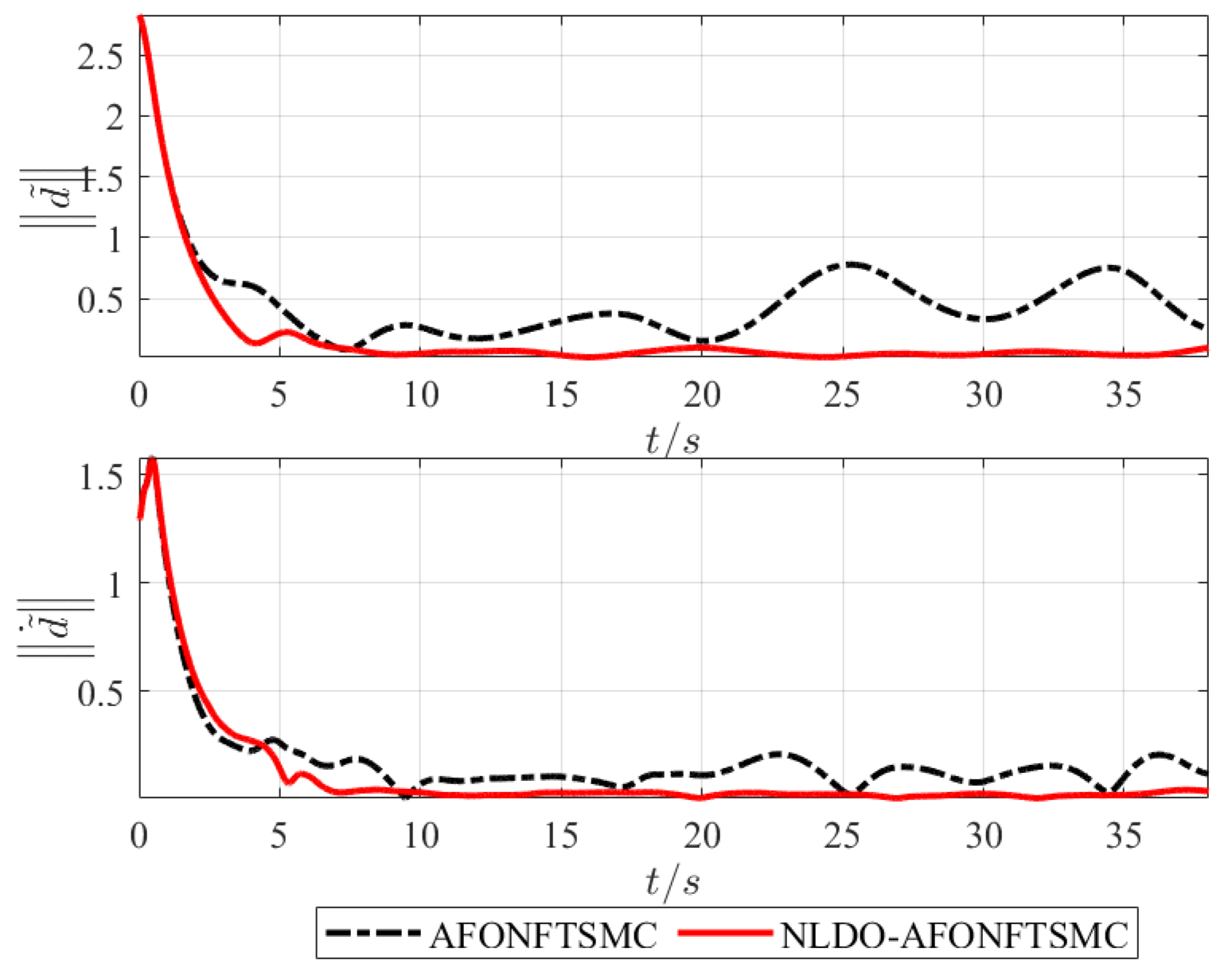
- To address the challenges posed by internal unmodeled dynamics and external environmental disturbances, a nonlinear lumped disturbance observer (NLDO) with exponential convergence is designed. This observer effectively compensates for unknown disturbances in real time, ensuring global stability and high-precision trajectory tracking even under harsh sea conditions. The integration of NLDO with AFONFTSMC provides a comprehensive control framework that enhances the reliability of the USV operations in dynamic maritime scenarios.
- (3)
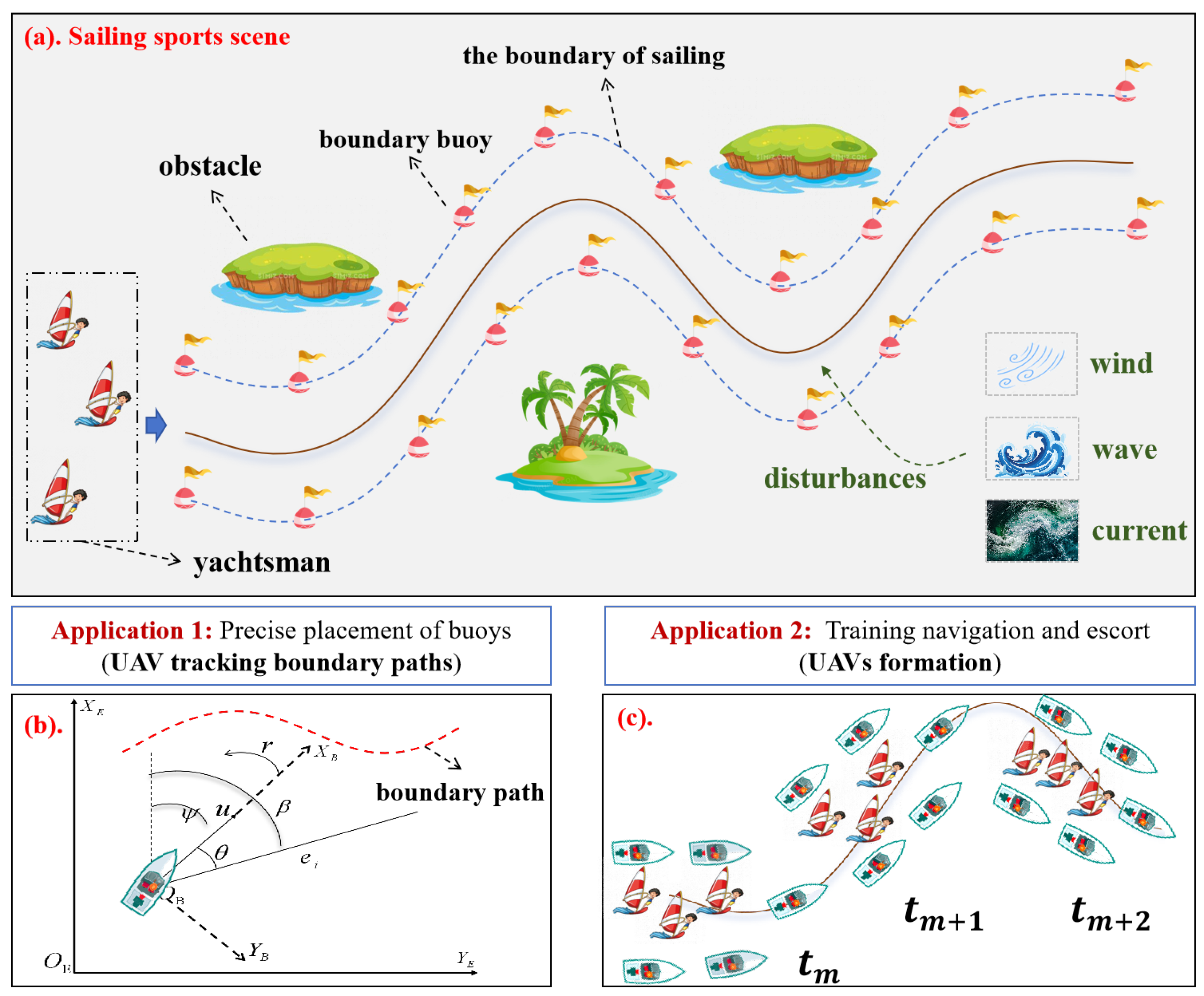
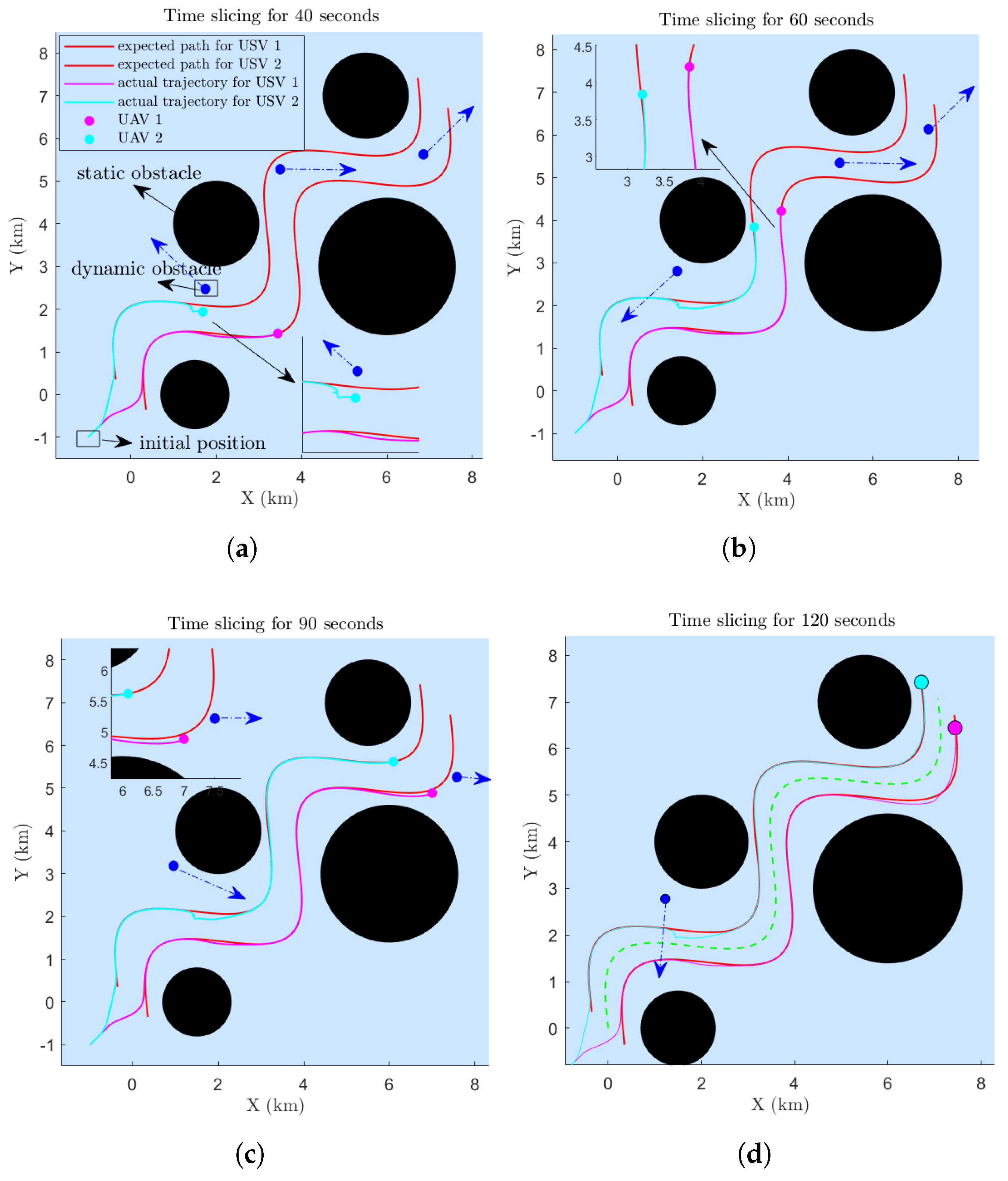
- A realistic maritime sports scenario involving multiple static and dynamic obstacles is constructed to validate the proposed control strategy. Numerical simulations demonstrate the superior tracking performance and adaptability of the proposed algorithms in obstacle-rich environments, highlighting their potential for practical applications such as buoy deployment, athlete escort, and competition boundary patrolling. The proposed framework incorporates the APF approach to facilitate obstacle avoidance in complex maritime environments, which proves particularly essential for mission-critical operations, including athlete accompaniment and precision buoy deployment.
2. Preliminaries
2.1. Basic Theories
2.2. USV Mathematical Model
3. Design of the Trajectory Tracking Control Strategy
3.1. Design of Disturbance Observer
3.2. Design of the USV Tracking Controller Under Ideal Conditions
4. Numerical Simulation and Discussion Analysis
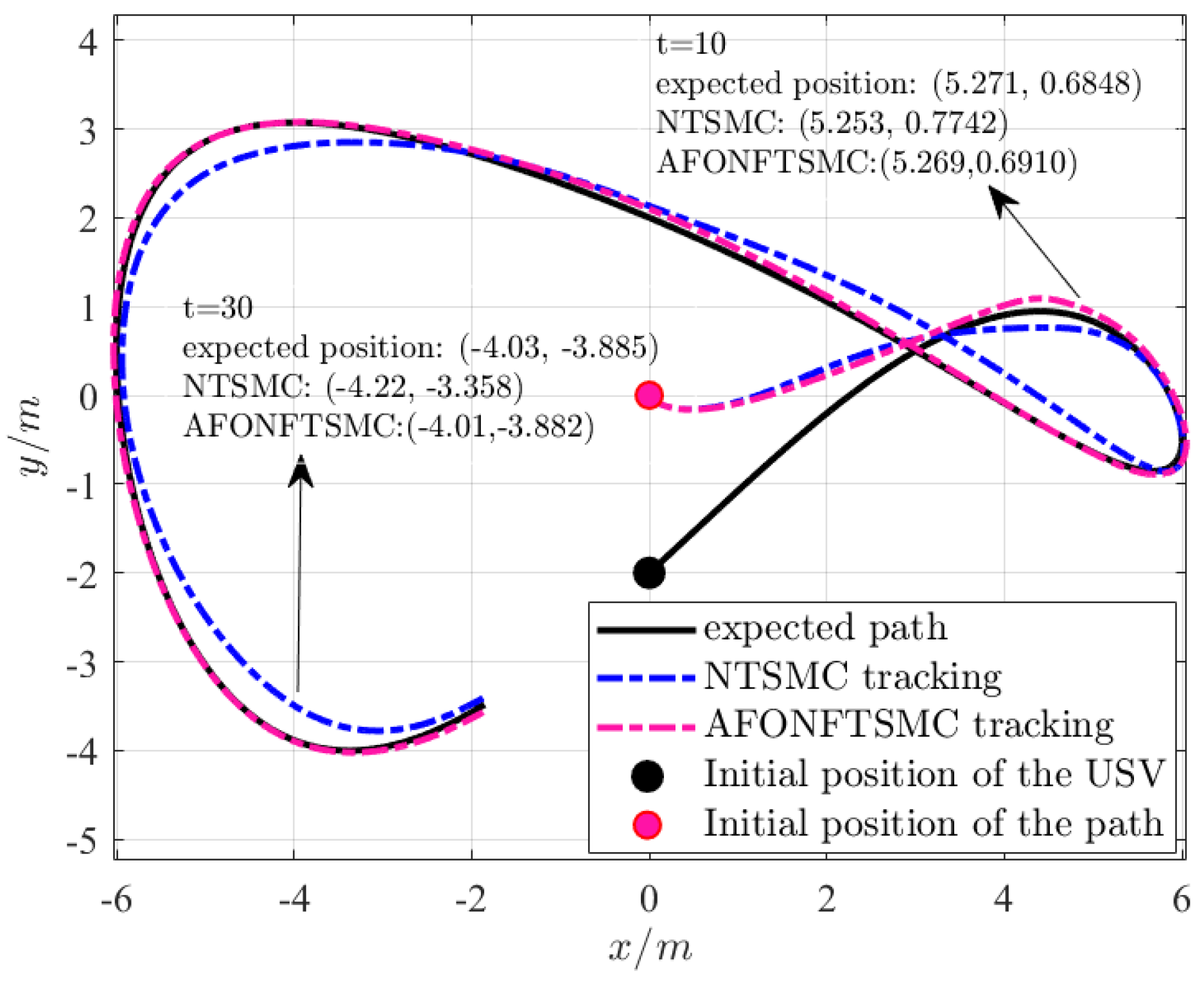
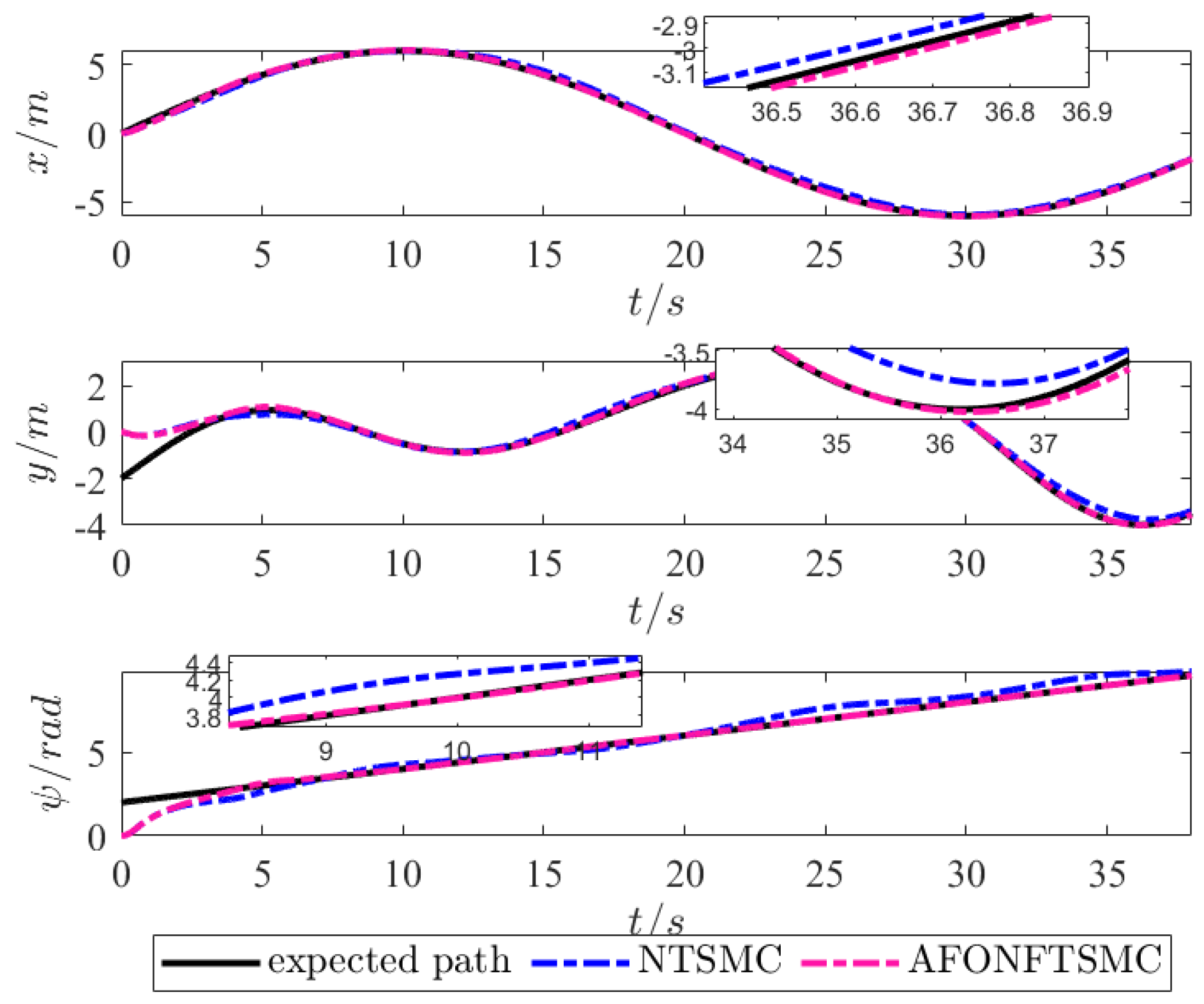
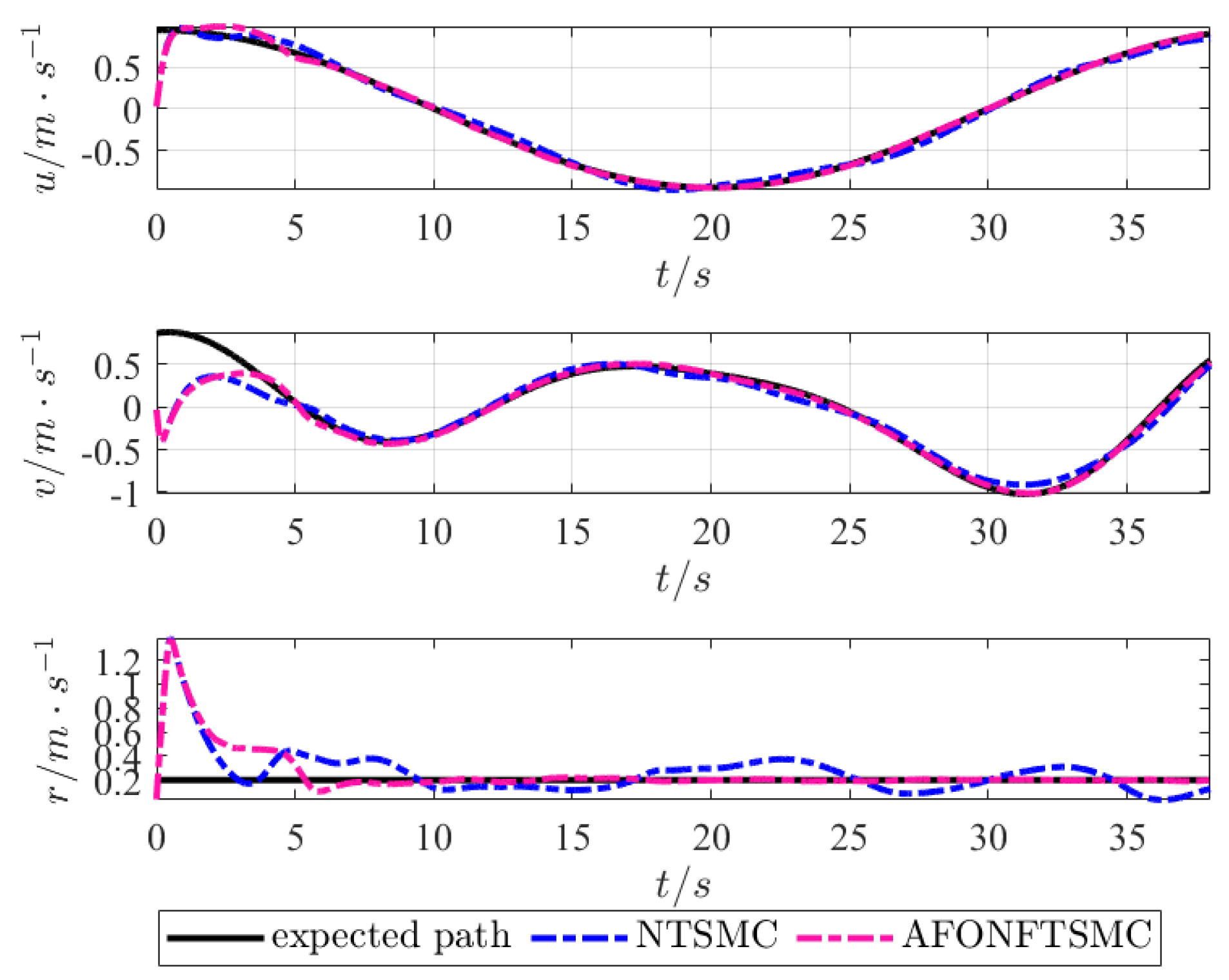
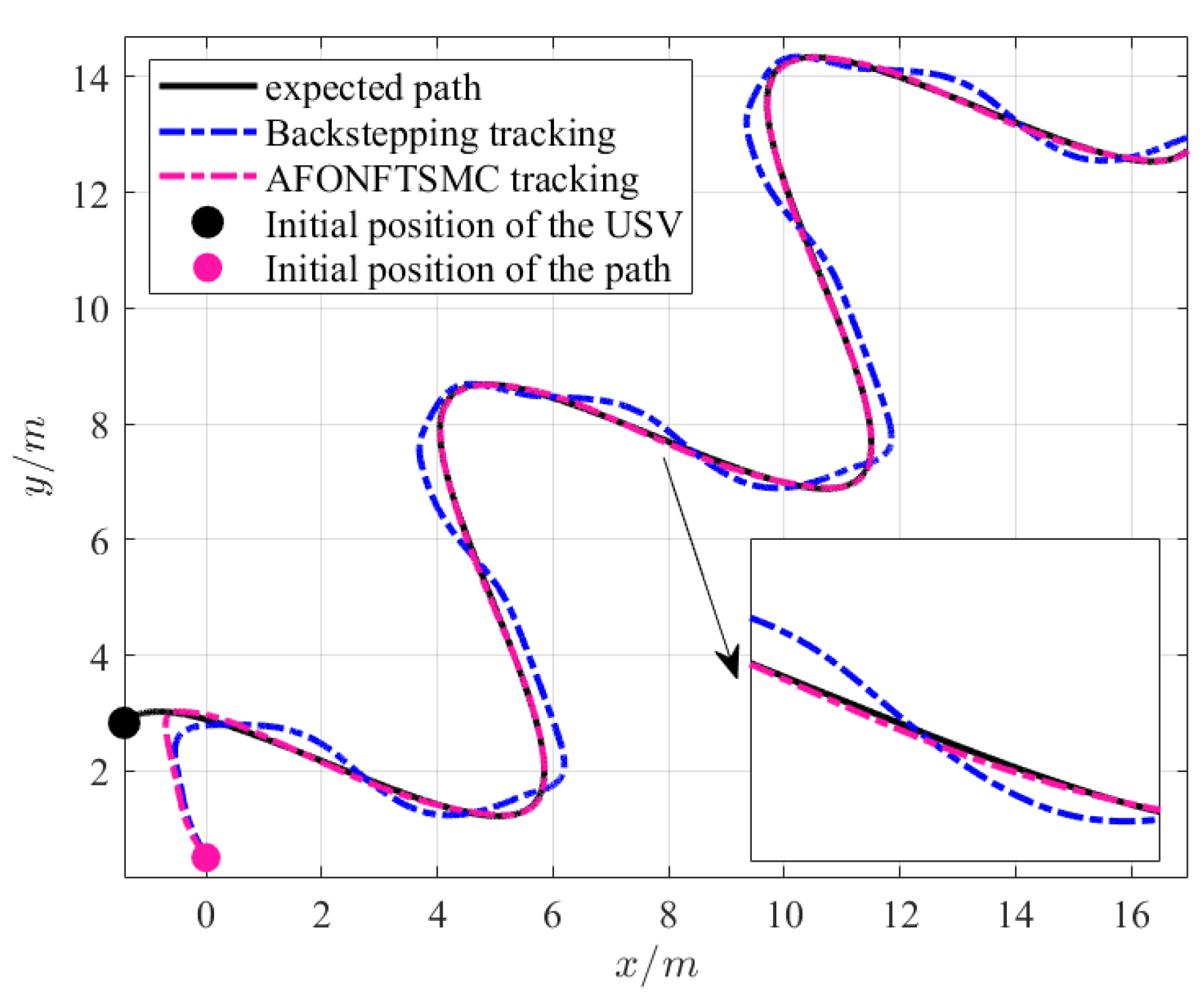
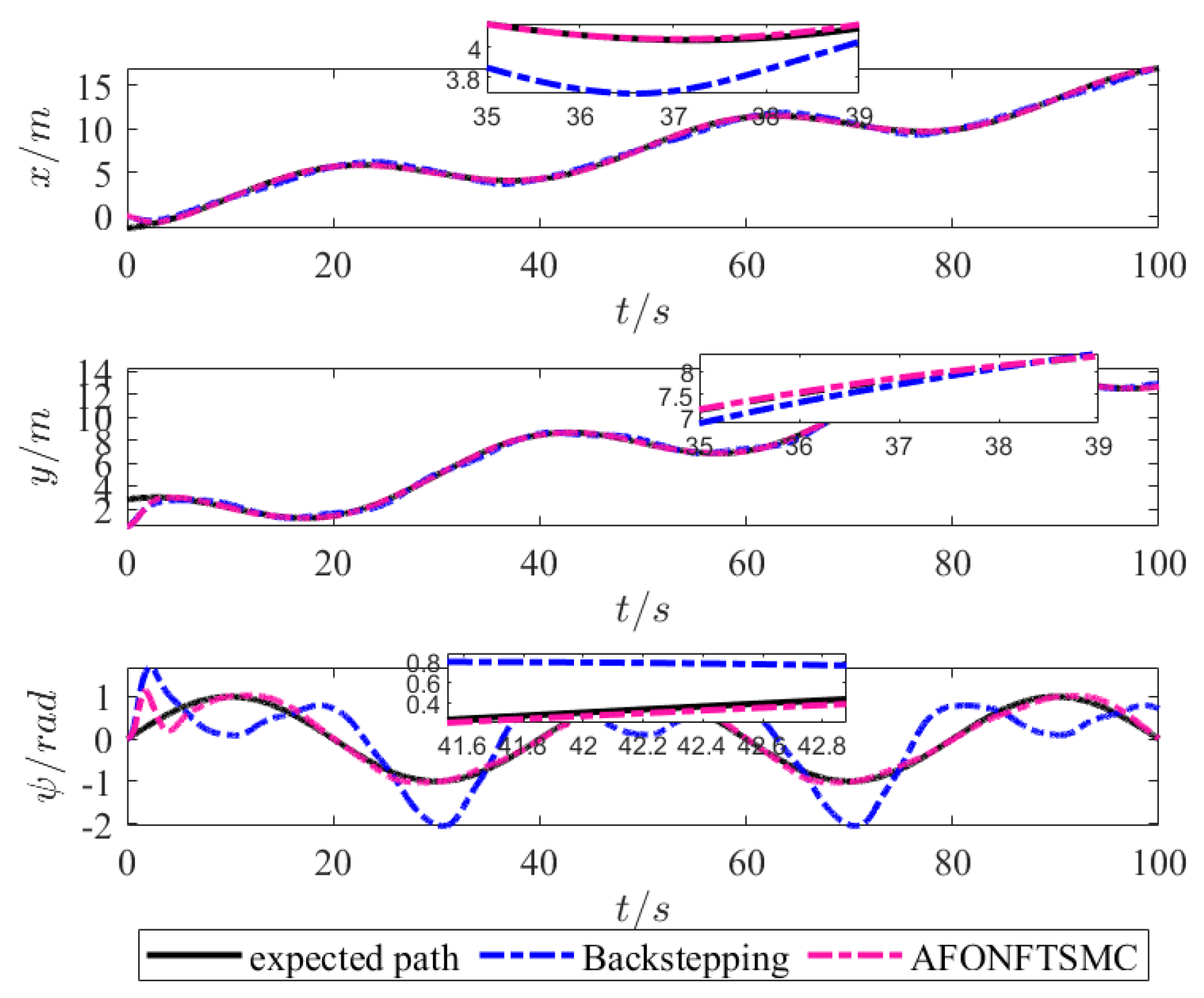
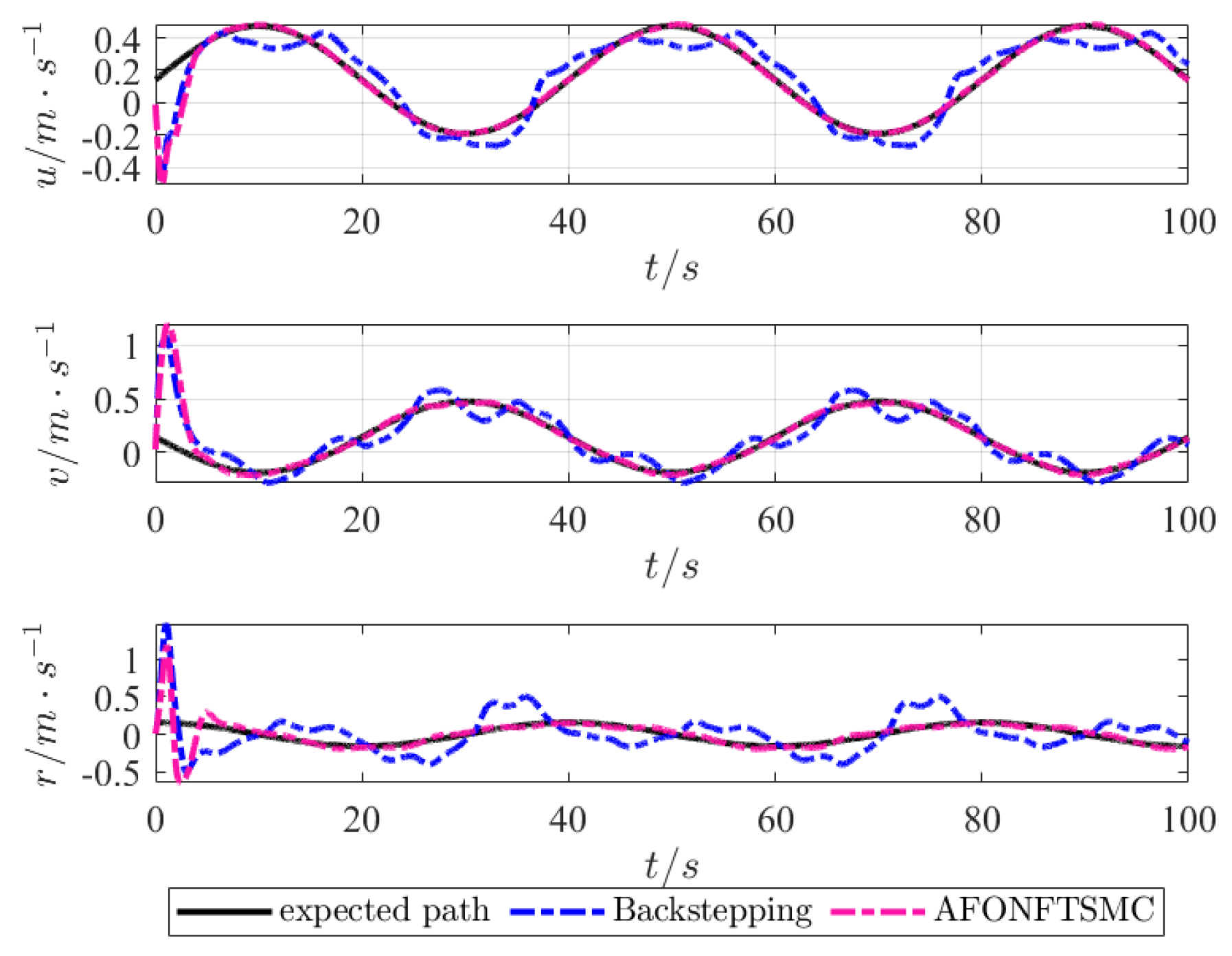
4.1. Comparison Simulation of Tracking Control Algorithms
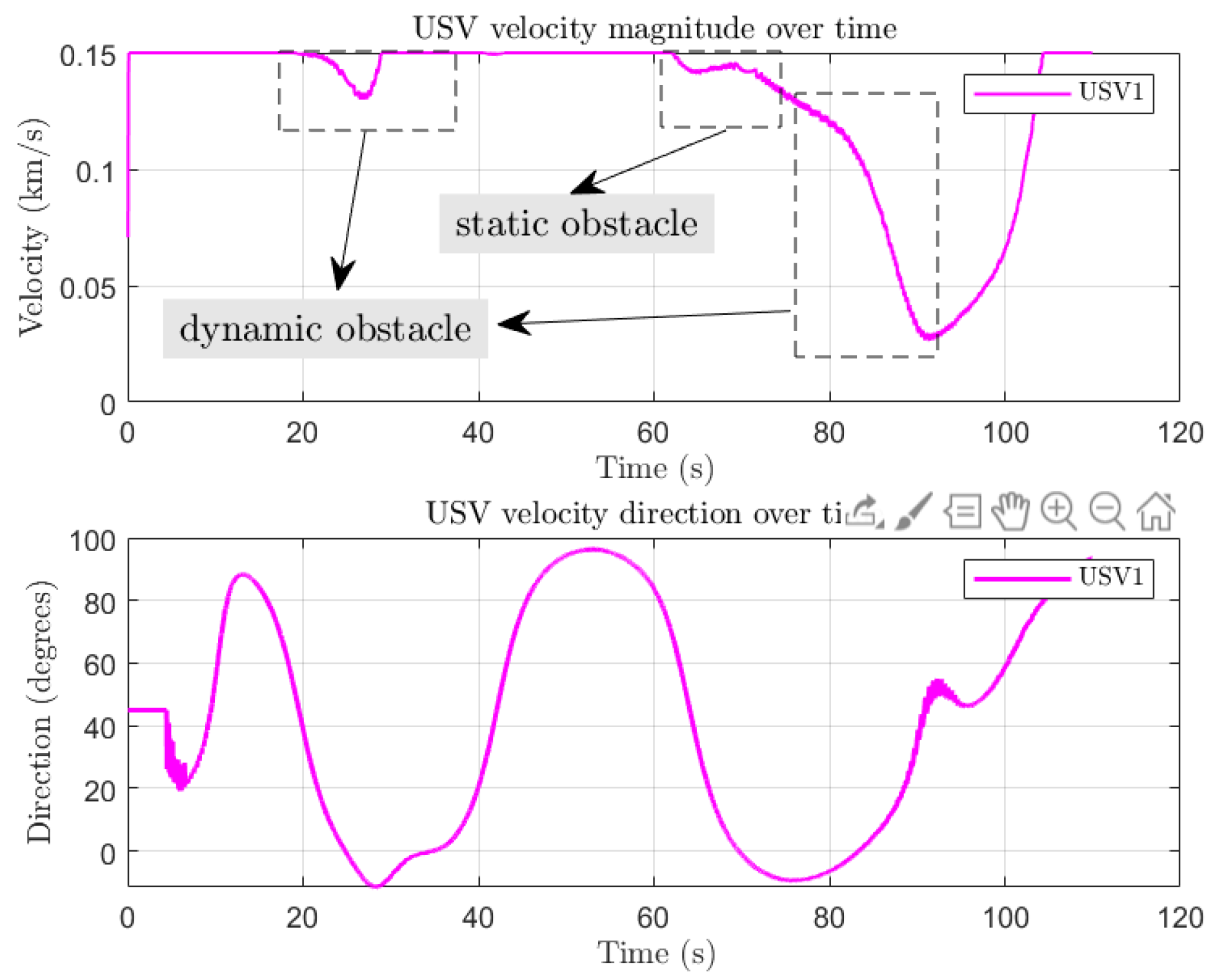
4.2. USVs Assisted Maritime Sports Scenarios: Tracking Boundary Paths
4.3. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Toriia, T.; Epikhin, A.; Panchenko, S.; Modina, M. Modern educational trends in the maritime industry. Shs Web Conf. 2023, 164, 60. [Google Scholar] [CrossRef]
- Louho Gbayoro, C. Training Course for Marine Officers on Diesel Engine Room Simulator at the Maritime Academy. Ph.D. Thesis, World Maritime University, Malmo, Sweden, 1990. [Google Scholar]
- Boretti, A. Unmanned surface vehicles for naval warfare and maritime security. J. Def. Model. Simul. 2024, 15485129241283056. [Google Scholar] [CrossRef]
- Wang, J.; Lu, Z.; Hong, X.; Wu, Z.; Li, W. Navigation and Obstacle Avoidance for USV in Autonomous Buoy Inspection: A Deep Reinforcement Learning Approach. J. Mar. Sci. Eng. 2025, 13, 843. [Google Scholar] [CrossRef]
- Gruber, J.; Anvar, A. An unmanned surface vehicle robot model; for autonomous sonobuoy deployment, and UAV landing platform. In Proceedings of the 2014 13th International Conference on Control Automation Robotics & Vision (ICARCV), Singapore, 10–12 December 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 1398–1402. [Google Scholar]
- Kale, S. Developments in unmanned surface vehicles (usvs): A review. In Proceedings of the International Conference on Applied Engineering and Natural Sciences, Konya, Turkey, 10–12 July 2023; Volume 1, pp. 596–600. [Google Scholar]
- Liao, Y.; Ge, Y.; Song, Z.; Qian, R.; Yu, W.; Xu, Y.; Li, Y.; Pang, S. Research on improved null space based unmanned surface vehicle formation maneuver control method for merchant ship escort. Ocean Eng. 2025, 319, 120225. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, Y.; Yuan, C.; Luo, J. Adaptive path following control of unmanned surface vehicles considering environmental disturbances and system constraints. IEEE Trans. Syst. Man Cybern. Syst. 2018, 51, 339–353. [Google Scholar] [CrossRef]
- Yue, X. UsV Course Control strategy based on the Disturbance Observer Under Disturbances of winds and waves. In Proceedings of the 2023 Smart City Challenges & Outcomes for Urban Transformation (SCOUT), Singapore, 29–30 July 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 76–80. [Google Scholar]
- Liu, T.; Dong, Z.; Du, H.; Song, L.; Mao, Y. Path following control of the underactuated USV based on the improved line-of-sight guidance algorithm. Pol. Marit. Res. 2017, 24, 3–11. [Google Scholar] [CrossRef]
- Dong, Z.; Wan, L.; Li, Y.; Liu, T.; Zhang, G. Trajectory tracking control of underactuated USV based on modified backstepping approach. Int. J. Nav. Archit. Ocean Eng. 2015, 7, 817–832. [Google Scholar] [CrossRef]
- bin Mansor, M.A.; bt Mohd Shamsuddin, P.N.F. Motion control algorithm for path following and trajectory tracking for unmanned surface vehicle: A review paper. In Proceedings of the 2018 3rd International Conference on Control, Robotics and Cybernetics (CRC), Penang, Malaysia, 26–28 September 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 73–77. [Google Scholar]
- Er, M.J.; Ma, C.; Liu, T.; Gong, H. Intelligent motion control of unmanned surface vehicles: A critical review. Ocean Eng. 2023, 280, 114562. [Google Scholar] [CrossRef]
- Gonzalez-Garcia, A.; Castañeda, H. Guidance and control based on adaptive sliding mode strategy for a USV subject to uncertainties. IEEE J. Ocean. Eng. 2021, 46, 1144–1154. [Google Scholar] [CrossRef]
- Liu, W.; Ye, H.; Yang, X. Super-twisting sliding mode control for the trajectory tracking of underactuated USVs with disturbances. J. Mar. Sci. Eng. 2023, 11, 636. [Google Scholar] [CrossRef]
- Chen, D.; Zhang, J.; Li, Z. A novel fixed-time trajectory tracking strategy of unmanned surface vessel based on the fractional sliding mode control method. Electronics 2022, 11, 726. [Google Scholar] [CrossRef]
- Karnani, C.; Raza, S.A.; Asif, M.; Ilyas, M. Adaptive control algorithm for trajectory tracking of underactuated unmanned surface vehicle (UUSV). J. Robot. 2023, 2023, 4820479. [Google Scholar] [CrossRef]
- Wang, S.; Sun, M.; Xu, Y.; Liu, J.; Sun, C. Predictor-based fixed-time LOS path following control of underactuated USV with unknown disturbances. IEEE Trans. Intell. Veh. 2023, 8, 2088–2096. [Google Scholar] [CrossRef]
- Wang, X.; Liu, J.; Peng, H.; Qie, X.; Zhao, X.; Lu, C. A simultaneous planning and control method integrating APF and MPC to solve autonomous navigation for USVs in unknown environments. J. Intell. Robot. Syst. 2022, 105, 36. [Google Scholar] [CrossRef]
- Wang, N.; Gao, Y.; Zhao, H.; Ahn, C.K. Reinforcement learning-based optimal tracking control of an unknown unmanned surface vehicle. IEEE Trans. Neural Netw. Learn. Syst. 2020, 32, 3034–3045. [Google Scholar] [CrossRef]
- Fu, M.; Wu, S.; Xu, Y. Active disturbance rejection sliding mode control for USV path tracking. In Proceedings of the 2020 39th Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 2590–2596. [Google Scholar]
- Su, Y.; Zheng, M.; Chen, G. Research on Ship Trajectory Tracking based on Nonsingular Fast Terminal Sliding Mode Control. In Proceedings of the 2023 China Automation Congress (CAC), Chongqing, China, 17–19 November 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 2797–2802. [Google Scholar]
- Gonzalez-Garcia, J.; Narcizo-Nuci, N.A.; Garcia-Valdovinos, L.G.; Salgado-Jimenez, T.; Gómez-Espinosa, A.; Cuan-Urquizo, E.; Cabello, J.A.E. Model-free high order sliding mode control with finite-time tracking for unmanned underwater vehicles. Appl. Sci. 2021, 11, 1836. [Google Scholar] [CrossRef]
- Li, G.; Li, Y.; Li, X.; Liu, M.; Zhang, X.; Jin, H. Fractional-Order Controller for the Course Tracking of Underactuated Surface Vessels Based on Dynamic Neural Fuzzy Model. Fractal Fract. 2024, 8, 720. [Google Scholar] [CrossRef]
- Dong, Z.; Qi, S.; Yu, M.; Zhang, Z.; Zhang, H.; Li, J.; Liu, Y. An improved dynamic surface sliding mode method for autonomous cooperative formation control of underactuated USVs with complex marine environment disturbances. Pol. Marit. Res. 2022, 29, 47–60. [Google Scholar] [CrossRef]
- Chen, Z.; Zhang, Y.; Nie, Y.; Tang, J.; Zhu, S. Adaptive sliding mode control design for nonlinear unmanned surface vessel using RBFNN and disturbance-observer. IEEE Access 2020, 8, 45457–45467. [Google Scholar] [CrossRef]
- Guo, G.; Zhang, P. Asymptotic stabilization of the USVs with actuator dead-zones and yaw constraints based on fixed-time disturbance observer. IEEE Trans. Veh. Technol. 2019, 69, 302–316. [Google Scholar] [CrossRef]
- Chen, W.H.; Ballance, D.; Gawthrop, P.; O’Reilly, J. A nonlinear disturbance observer for robotic manipulators. IEEE Trans. Ind. Electron. 2000, 47, 932–938. [Google Scholar] [CrossRef]
- Bastin, G.; Gevers, M. Stable adaptive observers for nonlinear time-varying systems. IEEE Trans. Autom. Control 1988, 33, 650–658. [Google Scholar] [CrossRef]
- Fan, Y.; Qiu, B.; Liu, L.; Yang, Y. Global fixed-time trajectory tracking control of underactuated USV based on fixed-time extended state observer. ISA Trans. 2023, 132, 267–277. [Google Scholar] [CrossRef]
- Luo, P.; Wu, D.; Yuan, K.; Yang, Y. Observer-based adaptive integral terminal sliding mode formation control for a vessel train with obstacle avoidance. Ocean Eng. 2023, 283, 115075. [Google Scholar] [CrossRef]
- Zhai, G.; Zhang, J.; Wu, S.; Wang, Y. Predefined-Time Tracking Control of Unmanned Surface Vehicle under Complex Time-Varying Disturbances. Electronics 2024, 13, 1510. [Google Scholar] [CrossRef]
- Ma, R.; Chen, J.; Lv, C.; Yang, Z.; Hu, X. Backstepping control with a fractional-order command filter and disturbance observer for unmanned surface vehicles. Fractal Fract. 2023, 8, 23. [Google Scholar] [CrossRef]
- Ni, J.; Liu, L.; Liu, C.; Hu, X. Fractional order fixed-time nonsingular terminal sliding mode synchronization and control of fractional order chaotic systems. Nonlinear Dyn. 2017, 89, 2065–2083. [Google Scholar] [CrossRef]
- Labbadi, M.; Cherkaoui, M. Adaptive fractional-order nonsingular fast terminal sliding mode based robust tracking control of quadrotor UAV with Gaussian random disturbances and uncertainties. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 2265–2277. [Google Scholar] [CrossRef]
- Yu, S.; Yu, X.; Shirinzadeh, B.; Man, Z. Continuous finite-time control for robotic manipulators with terminal sliding mode. Automatica 2005, 41, 1957–1964. [Google Scholar] [CrossRef]
- Qi, M.; Liu, P.; Zhao, Z. Event-triggered adaptive sliding mode control for robotic manipulators with disturbance compensation. J. Braz. Soc. Mech. Sci. Eng. 2022, 44, 577. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, C.; Xie, K. Finite time tracking control for USV with external disturbance. In Proceedings of the 2021 China Automation Congress (CAC), Beijing, China, 22–24 October 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 2969–2974. [Google Scholar]
- Han, J.; Xiong, J.; He, Y.; Gu, F.; Li, D. Nonlinear modeling for a water-jet propulsion USV: An experimental study. IEEE Trans. Ind. Electron. 2016, 64, 3348–3358. [Google Scholar] [CrossRef]
- Chen, D.; Zhang, J.; Huang, Y. A Fractional-order Sliding Mode Control Method for the USV Path Tracking. In Proceedings of the 2021 China Automation Congress (CAC), Beijing, China, 22–24 October 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 5391–5395. [Google Scholar]
- Skjetne, R.; Smogeli, Ø.; Fossen, T.I. Modeling, identification, and adaptive maneuvering of Cybership II: A complete design with experiments. IFAC Proc. Vol. 2004, 37, 203–208. [Google Scholar] [CrossRef]
- Mohammadi, A.; Tavakoli, M.; Marquez, H.J.; Hashemzadeh, F. Nonlinear disturbance observer design for robotic manipulators. Control Eng. Pract. 2013, 21, 253–267. [Google Scholar] [CrossRef]
- Zhu, F.; Peng, Y.; Cheng, M.; Luo, J.; Wang, Y. Finite-time observer-based trajectory tracking control of underactuated USVs using hierarchical non-singular terminal sliding mode. Cyber-Phys. Syst. 2022, 8, 263–285. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Parameters | Values |
|---|---|---|---|
| Term | Value | Term | Value | Term | Value |
|---|---|---|---|---|---|
| 23.8 kg | |||||
| 1.76 kg·m2 | |||||
| 0.046 m | |||||
| 0.29 m | |||||
| 1.225 m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tan, W.; Liu, L.; Zhou, J. Precise Tracking Control of Unmanned Surface Vehicles for Maritime Sports Course Teaching Assistance. J. Mar. Sci. Eng. 2025, 13, 1482. https://doi.org/10.3390/jmse13081482
Tan W, Liu L, Zhou J. Precise Tracking Control of Unmanned Surface Vehicles for Maritime Sports Course Teaching Assistance. Journal of Marine Science and Engineering. 2025; 13(8):1482. https://doi.org/10.3390/jmse13081482
Chicago/Turabian StyleTan, Wanting, Lei Liu, and Jiabao Zhou. 2025. "Precise Tracking Control of Unmanned Surface Vehicles for Maritime Sports Course Teaching Assistance" Journal of Marine Science and Engineering 13, no. 8: 1482. https://doi.org/10.3390/jmse13081482
APA StyleTan, W., Liu, L., & Zhou, J. (2025). Precise Tracking Control of Unmanned Surface Vehicles for Maritime Sports Course Teaching Assistance. Journal of Marine Science and Engineering, 13(8), 1482. https://doi.org/10.3390/jmse13081482