
Machine Learning-Based Binary Classification Models for Low Ice-Class Vessels Navigation Risk Assessment


Abstract
1. Introduction
2. Materials and Methods
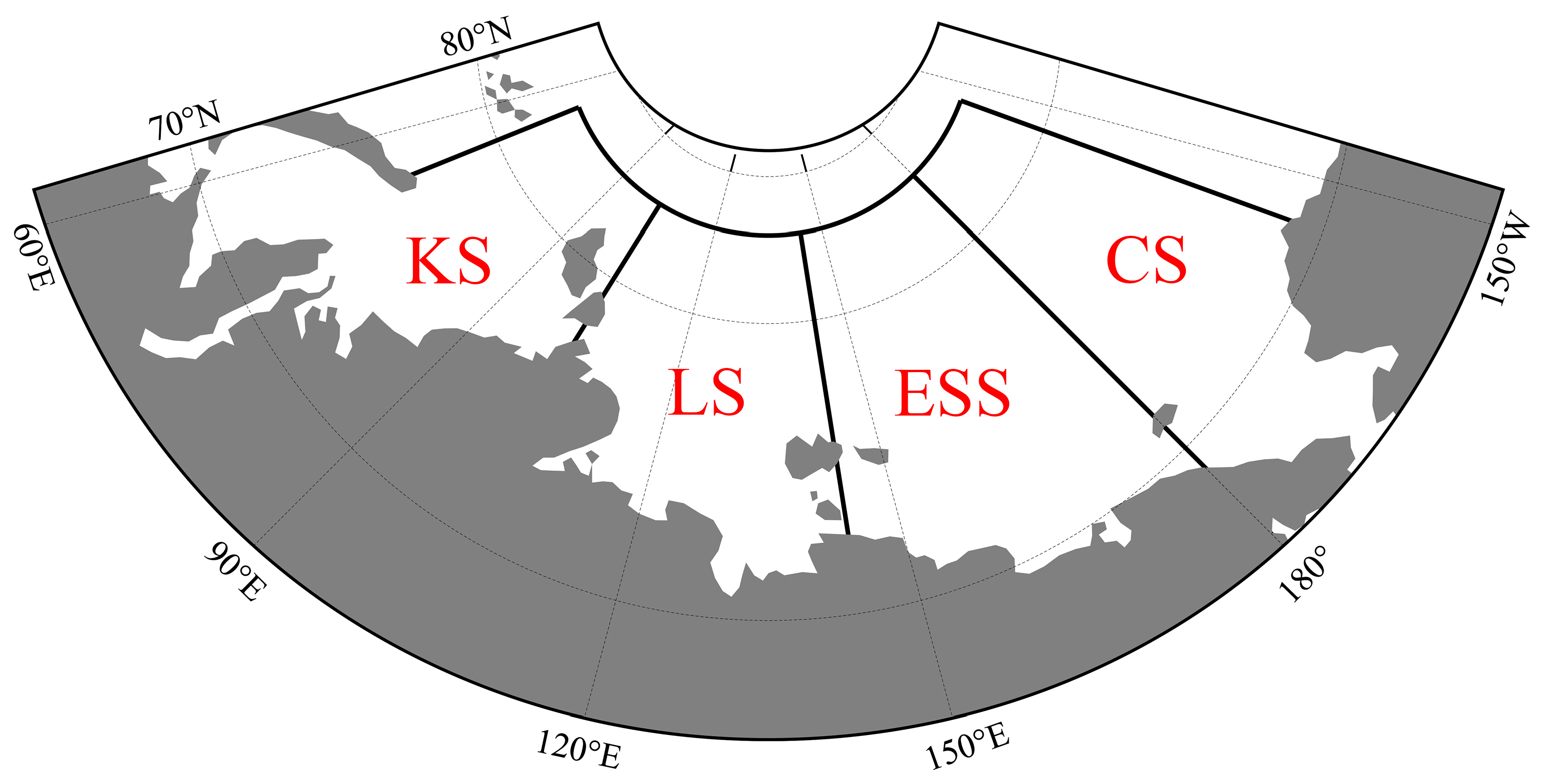
2.1. Study Area
2.2. Data Preparation
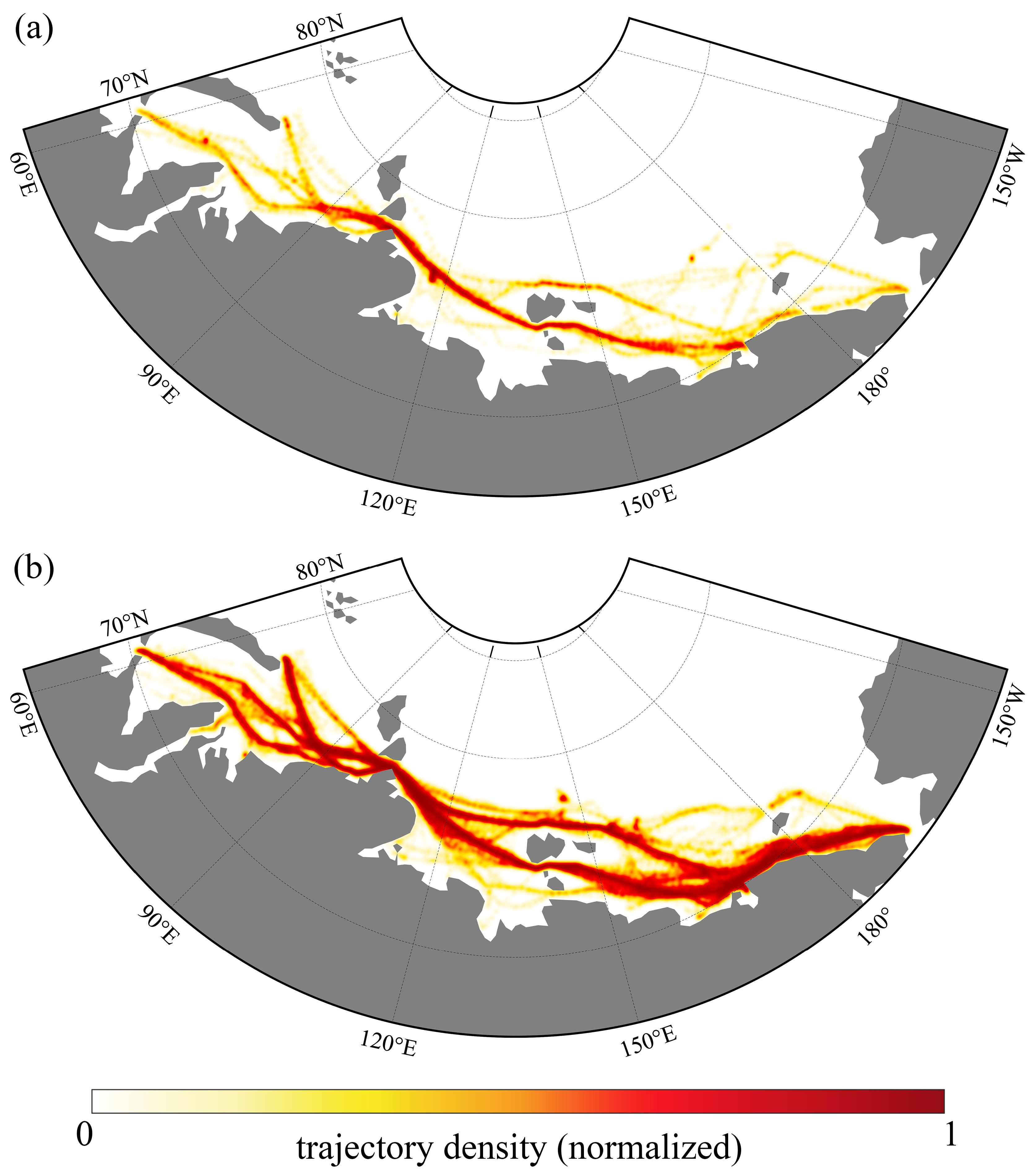
2.2.1. Positive Sample
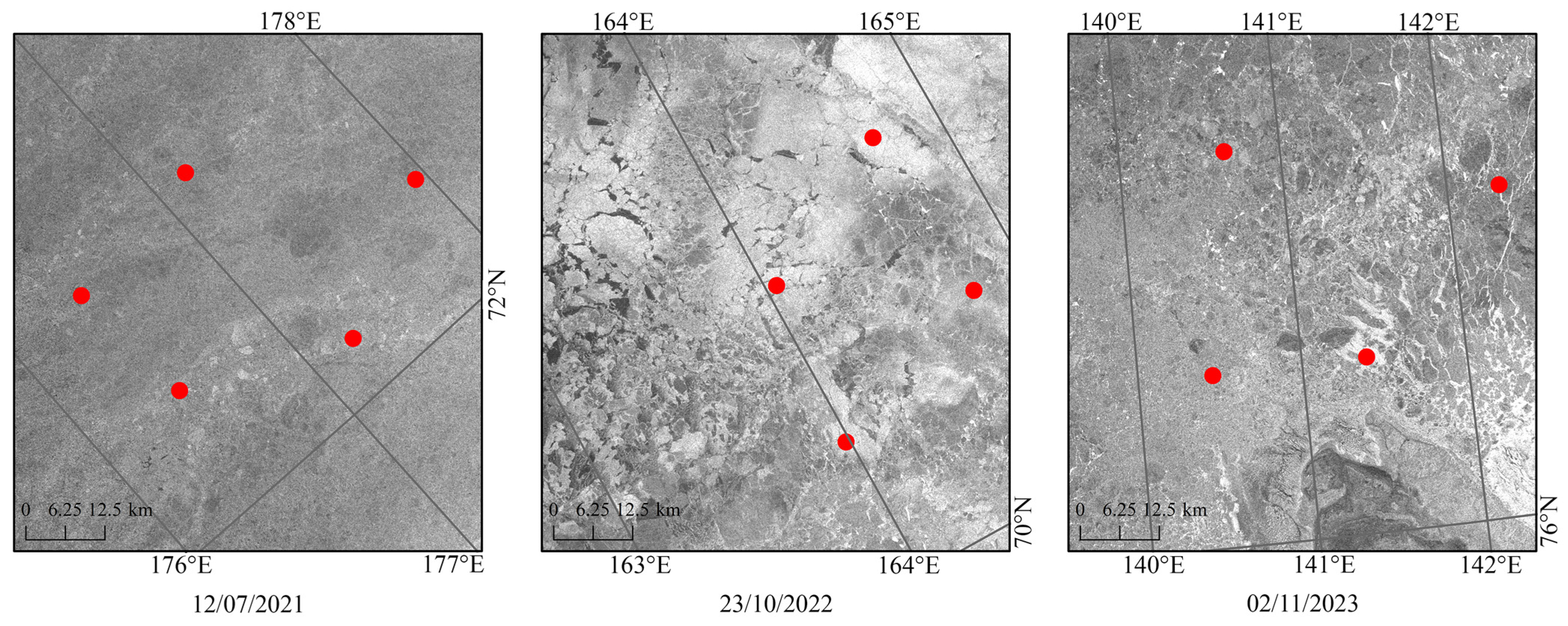
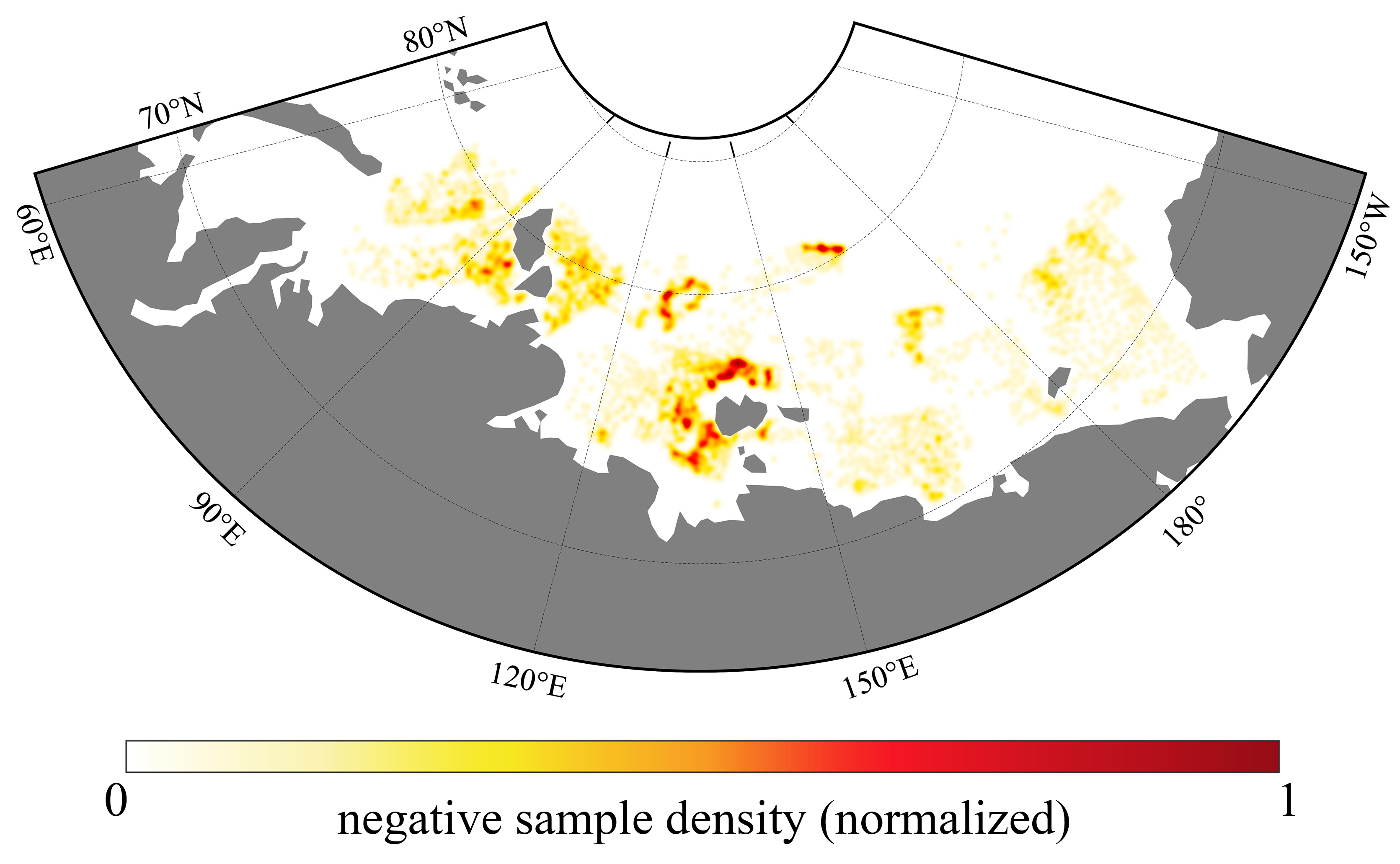
2.2.2. Negative Sample
2.2.3. Sea Ice Parameters
2.3. Methods
2.3.1. Navigability Assessment Approaches of Sea Ice Parameter Models
2.3.2. Construction of Navigation Risk Assessment Models Based on ML
2.3.3. Evaluation Metrics
3. Results
3.1. Classification Results of Sea Ice Parameter Models
3.2. Classification Results of Machine Learning Models
3.3. Further Validation of the Effectiveness of ML Models in Navigability Assessment
3.3.1. Monthly Navigability of NEP
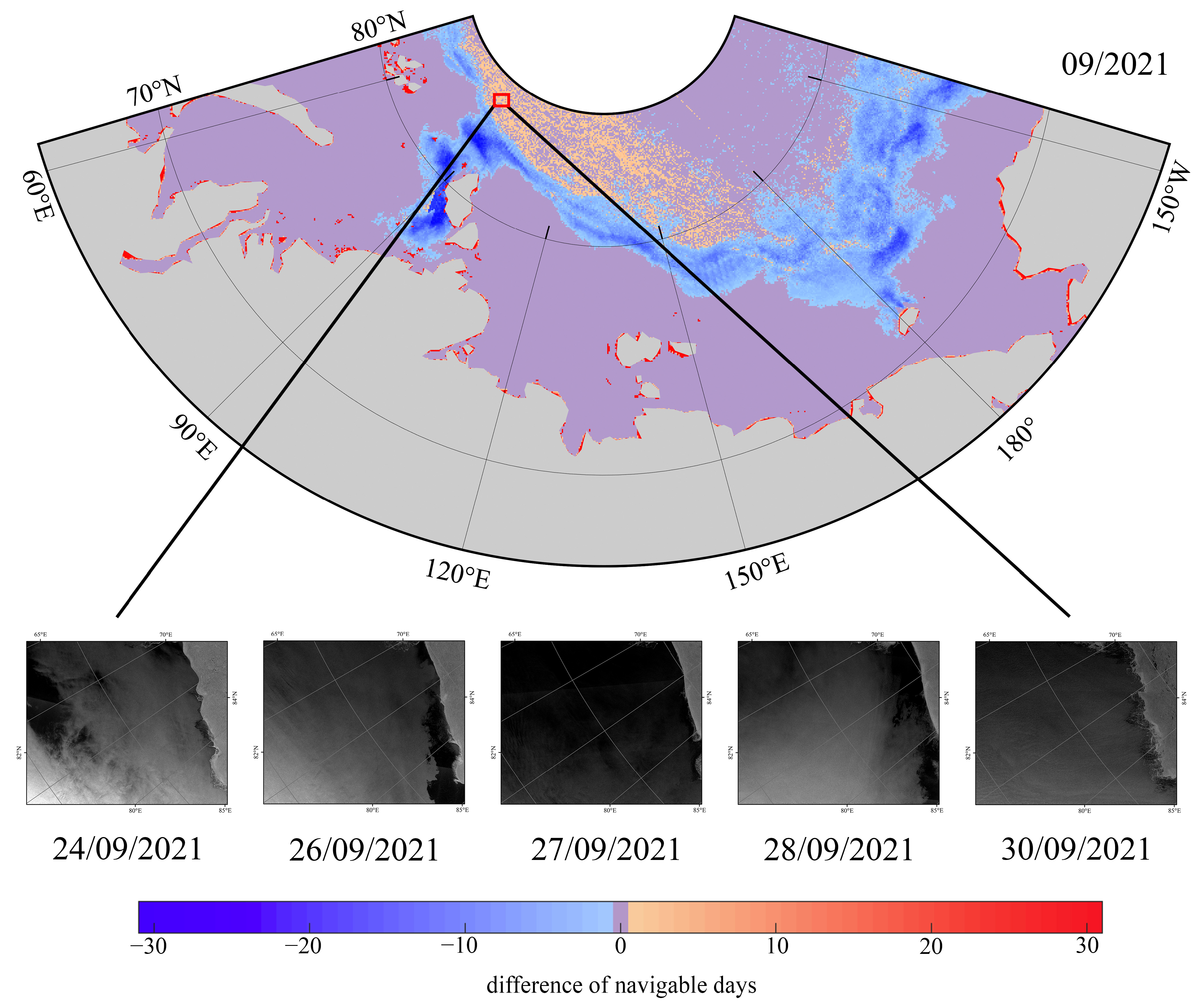
3.3.2. Difference of Monthly Navigability Assessment Results Between POLARIS and RF
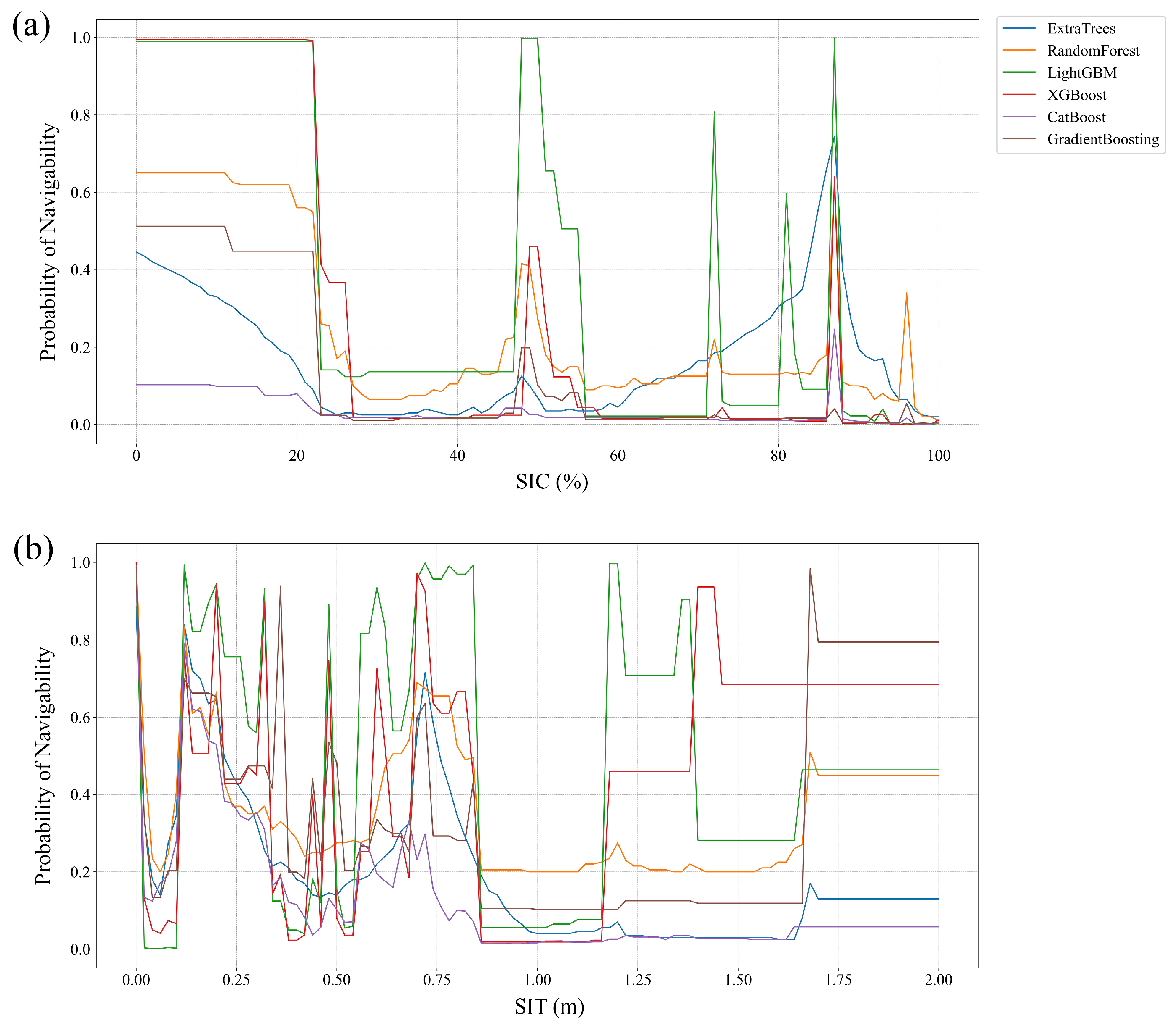
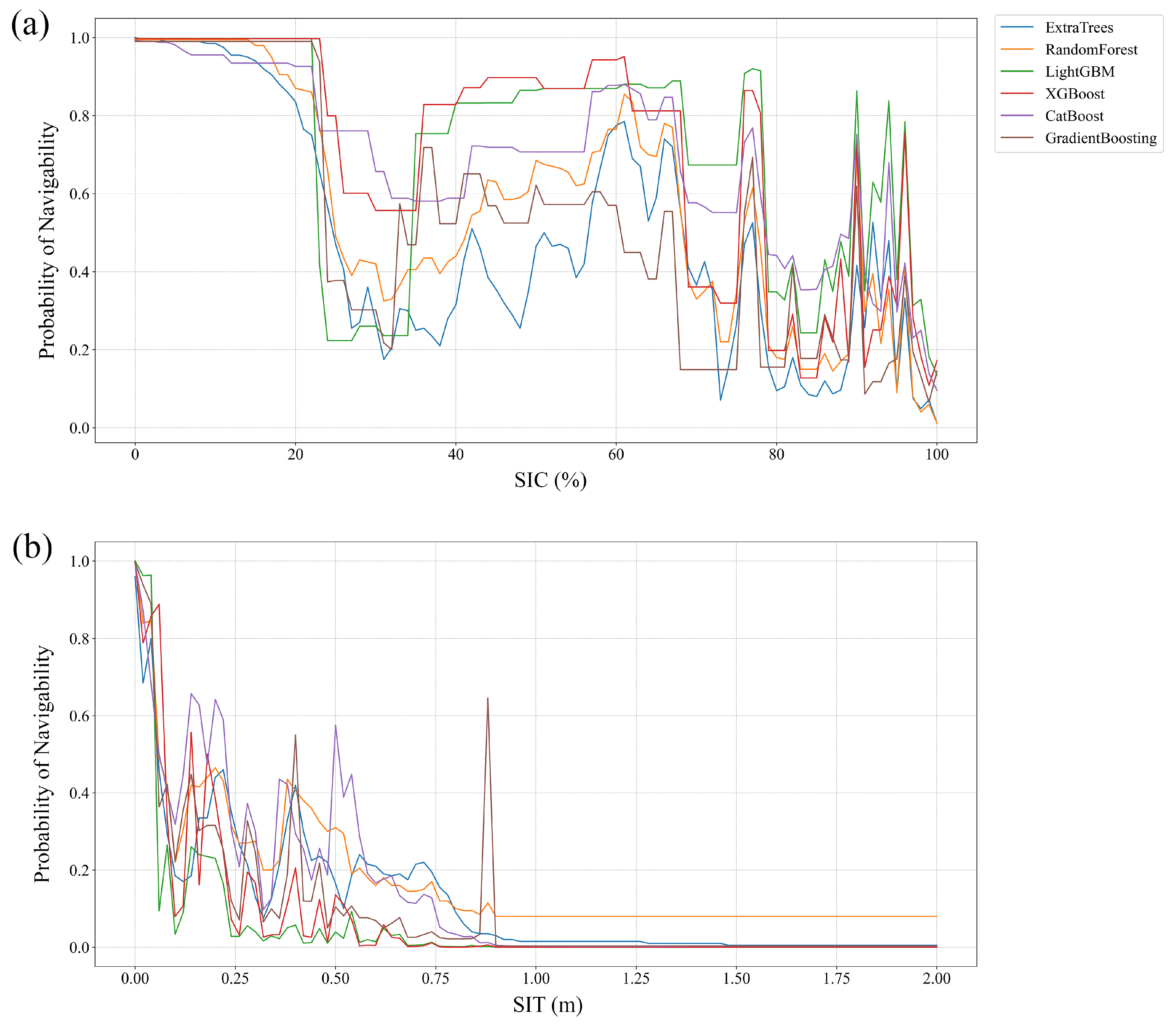
3.3.3. Sensitivity Analysis of ML Models
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| AIS | Automatic Identification System |
| NEP | Northeast Passage |
| PC | Polar Class |
| OW | Open Water |
| ML | Machine Learning |
| TPR | True Positive Rate |
| FPR | False Positive Rate |
| MCC | Matthews Correlation Coefficient |
| SIC | Sea Ice Concentration |
| SIT | Sea Ice Thickness |
| ATAM | Arctic Transport Accessibility Model |
| POLARIS | Polar Operation Limit Assessment Risk Indexing System |
| BS | Barents Sea |
| KS | Kara Sea |
| LS | Laptev Sea |
| ESS | East Siberian Sea |
| CS | Chukchi Sea |
| PIOMAS | Pan-Arctic Ice Ocean Modeling and Assimilation System |
| LR | Logistic Regression |
| KNN | K-Nearest Neighbors |
| SVC | Support Vector Classifier |
| MLP | Multi-layer Perceptron |
| RF | Random Forest |
| ETC | ExtraTrees Classifier |
| GBM | Gradient Boosting Machine |
| XGBoost | Extreme Gradient Boosting |
| LightGBM | Light Gradient Boosting Machine |
| CatBoost | Categorical Boosting |
References
- Wang, X.; Liu, Y.; Key, J.R.; Dworak, R. A New Perspective on Four Decades of Changes in Arctic Sea Ice from Satellite Observations. Remote Sens. 2022, 14, 1846. [Google Scholar] [CrossRef]
- Maslanik, J.; Stroeve, J.; Fowler, C.; Emery, W. Distribution and Trends in Arctic Sea Ice Age through Spring 2011. Geophys. Res. Lett. 2011, 38, 13. [Google Scholar] [CrossRef]
- Wang, T.; Ma, L.; Ma, X.; Zhao, Y. Risk Evolution and Prevention and Control Strategies in Emergency Responses for Arctic Maritime Transportation. Ocean Eng. 2024, 313, 119580. [Google Scholar] [CrossRef]
- Schröder, C.; Reimer, N.; Jochmann, P. Environmental Impact of Exhaust Emissions by Arctic Shipping. Ambio 2017, 46, 400–409. [Google Scholar] [CrossRef] [PubMed]
- O’Garra, T. Economic Value of Ecosystem Services, Minerals and Oil in a Melting Arctic: A Preliminary Assessment. Ecosyst. Serv. 2017, 24, 180–186. [Google Scholar] [CrossRef]
- Troell, M.; Eide, A.; Isaksen, J.; Hermansen, Ø.; Crépin, A.-S. Seafood from a Changing Arctic. Ambio 2017, 46, 368–386. [Google Scholar] [CrossRef] [PubMed]
- Arctic Council. Arctic Shipping Update: 37% Increase in Ships in the Arctic Over 10 Years. Available online: https://arctic-council.org/news/increase-in-arctic-shipping/ (accessed on 2 January 2025).
- Centre for High North Logistics. Main Results of NSR Transit Navigation in 2024. Available online: https://chnl.no/news/main-results-of-nsr-transit-navigation-in-2024/ (accessed on 13 February 2025).
- Kandel, R.; Baroud, H. A Data-Driven Risk Assessment of Arctic Maritime Incidents: Using Machine Learning to Predict Incident Types and Identify Risk Factors. Reliab. Eng. Syst. Saf. 2024, 243, 109779. [Google Scholar] [CrossRef]
- Liu, G.; Ji, M.; Jin, F.; Li, Y.; He, Y.; Li, T. Analysis of the Spatial and Temporal Variation of Sea Ice and Connectivity in the NEP of the Arctic in Summer in Hot Years. J. Mar. Sci. Eng. 2021, 9, 1177. [Google Scholar] [CrossRef]
- Matthews, J.L.; Peng, G.; Meier, W.N.; Brown, O. Sensitivity of Arctic Sea Ice Extent to Sea Ice Concentration Threshold Choice and Its Implication to Ice Coverage Decadal Trends and Statistical Projections. Remote Sens. 2020, 12, 807. [Google Scholar] [CrossRef]
- Wu, M.; Jia, L.; Xing, Q.; Song, X. Spatio-Temporal Variation of Arctic Sea Ice in Summer from 2003 to 2013. Chin. Geogr. Sci. 2018, 28, 38–46. [Google Scholar] [CrossRef]
- Min, C.; Zhou, X.; Luo, H.; Yang, Y.; Wang, Y.; Zhang, J.; Yang, Q. Toward Quantifying the Increasing Accessibility of the Arctic Northeast Passage in the Past Four Decades. Adv. Atmos. Sci. 2023, 40, 2378–2390. [Google Scholar] [CrossRef]
- Li, T.; Wang, Y.; Li, Y.; Wang, B.; Liu, Q.; Chen, X. Feasibility of the Northern Sea Route: Impact of Sea Ice Thickness Uncertainty on Navigation. J. Mar. Sci. Eng. 2024, 12, 1078. [Google Scholar] [CrossRef]
- Transport Canada. Arctic Ice Regime Shipping System (AIRSS) Standards Transport Publication, 12259 E. Available online: https://tc.canada.ca/sites/default/files/migrated/tp12259e.pdf (accessed on 16 September 2024).
- Lei, R.; Xie, H.; Wang, J.; Leppäranta, M.; Jónsdóttir, I.; Zhang, Z. Changes in Sea Ice Conditions along the Arctic Northeast Passage from 1979 to 2012. Cold Reg. Sci. Technol. 2015, 119, 132–144. [Google Scholar] [CrossRef]
- Khon, V.C.; Mokhov, I.I.; Latif, M.; Semenov, V.A.; Park, W. Perspectives of Northern Sea Route and Northwest Passage in the Twenty-First Century. Clim. Change 2010, 100, 757–768. [Google Scholar] [CrossRef]
- Shibata, H.; Izumiyama, K.; Tateyama, K.; Enomoto, H.; Takahashi, S. Sea-Ice Coverage Variability on the Northern Sea Routes, 1980–2011. Ann. Glaciol. 2013, 54, 139–148. [Google Scholar] [CrossRef]
- Ji, M.; Liu, G.; He, Y.; Li, Y.; Li, T. Analysis of Sea Ice Timing and Navigability along the Arctic Northeast Passage from 2000 to 2019. J. Mar. Sci. Eng. 2021, 9, 728. [Google Scholar] [CrossRef]
- International Maritime Organization. Guidance on Methodologies for Assessing Operational Capabilities and Limitations in Ice. Available online: https://www.nautinst.org/static/uploaded/2f01665c-04f7-4488-802552e5b5db62d9.pdf (accessed on 16 September 2024).
- Chen, J.; Kang, S.; Du, W.; Guo, J.; Xu, M.; Zhang, Y.; Zhong, X.; Zhang, W.; Chen, J. Perspectives on Future Sea Ice and Navigability in the Arctic. Cryosphere 2021, 15, 5473–5482. [Google Scholar] [CrossRef]
- Ma, L.; Qian, S.; Dong, H.; Fan, J.; Xu, J.; Cao, L.; Xu, S.; Li, X.; Cai, C.; Huang, Y.; et al. Navigability of Liquefied Natural Gas Carriers Along the Northern Sea Route. J. Mar. Sci. Eng. 2024, 12, 2166. [Google Scholar] [CrossRef]
- Mohamed, B.; Nilsen, F.; Skogseth, R. Interannual and Decadal Variability of Sea Surface Temperature and Sea Ice Concentration in the Barents Sea. Remote Sens. 2022, 14, 4413. [Google Scholar] [CrossRef]
- National Snow and Ice Data Center. Sea Ice Analysis Spreadsheets Overview. Available online: https://nsidc.org/sites/default/files/documents/technical-reference/sea-ice-analysis-spreadsheets-overview.pdf (accessed on 6 September 2024).
- Liu, Y.; Luo, H.; Min, C.; Chen, Q.; Yang, Q. Changes in the Arctic Traffic Occupancy and Their Connection to Sea Ice Conditions from 2015 to 2020. Remote Sens. 2024, 16, 1157. [Google Scholar] [CrossRef]
- Rodríguez, J.P.; Klemm, K.; Duarte, C.M.; Eguíluz, V.M. Shipping Traffic through the Arctic Ocean: Spatial Distribution, Seasonal Variation, and Its Dependence on the Sea Ice Extent. iScience 2024, 27, 110236. [Google Scholar] [CrossRef] [PubMed]
- Spreen, G.; Kaleschke, L.; Heygster, G. Sea Ice Remote Sensing Using AMSR-E 89-GHz Channels. J. Geophys. Res. 2008, 113, 2005JC003384. [Google Scholar] [CrossRef]
- Schweiger, A.; Lindsay, R.; Zhang, J.; Steele, M.; Stern, H.; Kwok, R. Uncertainty in Modeled Arctic Sea Ice Volume. J. Geophys. Res. 2011, 116, C00D06. [Google Scholar] [CrossRef]
- Samant, P.; Agarwal, R. Machine Learning Techniques for Medical Diagnosis of Diabetes Using Iris Images. Comput. Methods Programs Biomed. 2018, 157, 121–128. [Google Scholar] [CrossRef] [PubMed]
- Tan, B.; Gan, Z.; Wu, Y. The Measurement and Early Warning of Daily Financial Stability Index Based on XGBoost and SHAP: Evidence from China. Expert Syst. Appl. 2023, 227, 120375. [Google Scholar] [CrossRef]
- Li, Q.; Zhao, S.; Zhao, S.; Wen, J. Logistic Regression Matching Pursuit Algorithm for Text Classification. Knowl.-Based Syst. 2023, 277, 110761. [Google Scholar] [CrossRef]
- Liu, Q.; Liu, C. A Novel Locally Linear KNN Method With Applications to Visual Recognition. IEEE Trans. Neural Netw. Learn. Syst. 2017, 28, 2010–2021. [Google Scholar] [CrossRef] [PubMed]
- Cox, D.R. The Regression Analysis of Binary Sequences. J. R. Stat. Soc. Ser. B Stat. Methodol. 1958, 20, 215–232. [Google Scholar] [CrossRef]
- Cover, T.; Hart, P. Nearest Neighbor Pattern Classification. IEEE Trans. Inform. Theory 1967, 13, 21–27. [Google Scholar] [CrossRef]
- Cortes, C.; Vapnik, V. Support-Vector Networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Rumelhart, D.E.; Hinton, G.E.; Williams, R.J. Learning representations by back-propagating errors. Nature 1986, 323, 533–536. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Geurts, P.; Ernst, D.; Wehenkel, L. Extremely Randomized Trees. Mach. Learn. 2006, 63, 3–42. [Google Scholar] [CrossRef]
- Friedman, J.H. Greedy Function Approximation: A Gradient Boosting Machine. Ann. Statist. 2001, 29, 1189–1232. [Google Scholar] [CrossRef]
- Chen, T.; Guestrin, C. XGBoost: A Scalable Tree Boosting System. In Proceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, ACM, San Francisco, CA, USA, 13 August 2016; pp. 785–794. [Google Scholar] [CrossRef]
- Ke, G.; Meng, Q.; Finley, T.; Wang, T.; Chen, W.; Ma, W.; Ye, Q.; Liu, T.-Y. LightGBM: A Highly Efficient Gradient Boosting Decision Tree. In Advances in Neural Information Processing Systems 30; Curran Associates, Inc.: New York, NY, USA, 2017; pp. 3146–3154. [Google Scholar]
- Prokhorenkova, L.; Gusev, G.; Vorobev, A.; Dorogush, A.V.; Gulin, A. CatBoost: Unbiased Boosting with Categorical Features. arXiv 2018, arXiv:1706.09516. [Google Scholar] [CrossRef]
- Sutojo, T.; Rustad, S.; Akrom, M.; Syukur, A.; Shidik, G.F.; Dipojono, H.K. A Machine Learning Approach for Corrosion Small Datasets. Npj Mater. Degrad. 2023, 7, 18. [Google Scholar] [CrossRef]
- Bourel, M.; Segura, A.M.; Crisci, C.; López, G.; Sampognaro, L.; Vidal, V.; Kruk, C.; Piccini, C.; Perera, G. Machine Learning Methods for Imbalanced Data Set for Prediction of Faecal Contamination in Beach Waters. Water Res. 2021, 202, 117450. [Google Scholar] [CrossRef] [PubMed]
- Luque, A.; Carrasco, A.; Martín, A.; De Las Heras, A. The Impact of Class Imbalance in Classification Performance Metrics Based on the Binary Confusion Matrix. Pattern Recognit. 2019, 91, 216–231. [Google Scholar] [CrossRef]
- Diallo, R.; Edalo, C.; Awe, O.O. Machine Learning Evaluation of Imbalanced Health Data: A Comparative Analysis of Balanced Accuracy, MCC, and F1 Score. In Practical Statistical Learning and Data Science Methods; Awe, O.O.A., Vance, E., Eds.; STEAM-H: Science, Technology, Engineering, Agriculture, Mathematics & Health; Springer Nature: Cham, Switzerland, 2025; pp. 283–312. ISBN 978-3-031-72214-1. [Google Scholar] [CrossRef]
- Canbek, G.; Taskaya Temizel, T.; Sagiroglu, S. PToPI: A Comprehensive Review, Analysis, and Knowledge Representation of Binary Classification Performance Measures/Metrics. Sn Comput. Sci. 2022, 4, 13. [Google Scholar] [CrossRef] [PubMed]
- Chicco, D.; Warrens, M.J.; Jurman, G. The Matthews Correlation Coefficient (MCC) Is More Informative Than Cohen’s Kappa and Brier Score in Binary Classification Assessment. IEEE Access 2021, 9, 78368–78381. [Google Scholar] [CrossRef]
- Jeong, S.-Y.; Choi, K.; Kim, H.-S. Investigation of Ship Resistance Characteristics under Pack Ice Conditions. Ocean Eng. 2021, 219, 108264. [Google Scholar] [CrossRef]
- Yang, X.; Lin, Z.Y.; Zhang, W.J.; Xu, S.; Zhang, M.Y.; Wu, Z.D.; Han, B. Review of Risk Assessment for Navigational Safety and Supported Decisions in Arctic Waters. Ocean Coast. Manag. 2024, 247, 106931. [Google Scholar] [CrossRef]
- Zhou, X.; Min, C.; Yang, Y.; Landy, J.C.; Mu, L.; Yang, Q. Revisiting Trans-Arctic Maritime Navigability in 2011–2016 from the Perspective of Sea Ice Thickness. Remote Sens. 2021, 13, 2766. [Google Scholar] [CrossRef]
- Chen, X.; Zhao, J.; Zhao, Y.; Liu, X.; Ma, L.; Liu, M.; Shao, Z.; Xiao, J.; Chen, Z.; Zhang, S.; et al. Risk Assessment of Ice-Class-Based Navigation in Arctic: A Case Study in the Vilkitsky Strait. J. Phys. Conf. Ser. 2024, 2718, 012040. [Google Scholar] [CrossRef]
- Zhang, Y.; Sun, X.; Zha, Y.; Wang, K.; Chen, C. Changing Arctic Northern Sea Route and Transpolar Sea Route: A Prediction of Route Changes and Navigation Potential before Mid-21st Century. J. Mar. Sci. Eng. 2023, 11, 2340. [Google Scholar] [CrossRef]
- Mahmoud, M.R.; Roushdi, M.; Aboelkhear, M. Potential Benefits of Climate Change on Navigation in the Northern Sea Route by 2050. Sci. Rep. 2024, 14, 2771. [Google Scholar] [CrossRef] [PubMed]
- Jones-Williams, K.; Galloway, T.S.; Peck, V.L.; Manno, C. Remote, but Not Isolated—Microplastics in the Sub-Surface Waters of the Canadian Arctic Archipelago. Front. Mar. Sci. 2021, 8, 666482. [Google Scholar] [CrossRef]
- Lack, D.A.; Corbett, J.J. Black Carbon from Ships: A Review of the Effects of Ship Speed, Fuel Quality and Exhaust Gas Scrubbing. Atmos. Chem. Phys. 2012, 12, 3985–4000. [Google Scholar] [CrossRef]
- Helle, I.; Mäkinen, J.; Nevalainen, M.; Afenyo, M.; Vanhatalo, J. Impacts of Oil Spills on Arctic Marine Ecosystems: A Quantitative and Probabilistic Risk Assessment Perspective. Environ. Sci. Technol. 2020, 54, 2112–2121. [Google Scholar] [CrossRef] [PubMed]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Projected Positive Sample | Projected Negative Sample | |
|---|---|---|
| Actual positive sample | True positive (TP) | False negative (FN) |
| Actual negative sample | False positive (FP) | True negative (TN) |
| No. | References | Sea Ice Parameters | Models | Explanation |
|---|---|---|---|---|
| 1 | (Transport Canada, 2018) [15] | SIT | for Open Water (OW) for Polar Class (PC) 6 | OW and PC6 vessels can safely navigate when the maximum SIT along the route does not exceed 0.15 m and 1.2 m, respectively. |
| 2 | (Lei et al., 2015) [16] | SIC | for PC6 | PC6 vessels can safely navigate when the maximum SIC along the route does not exceed 50%. |
| 3 | (Khon et al., 2010) [17] | SIC | for OW | OW vessels can safely navigate when the maximum SIC along the route does not exceed 15%. |
| 4 | (Shibata et al., 2013) [18] | SIC | for OW | OW vessels can safely navigate when the maximum SIC along the route does not exceed 30%. |
| 5 | (Ji et al., 2021) [19] | SIC | for OW | OW vessels can safely navigate when the maximum SIC along the route does not exceed 40%. |
| 6 | (Transport Canada, 2018) [15] | SIC, SIT | Arctic Transport Accessibility Model (ATAM) with the equation: | OW and PC6 vessels can safely navigate when the value along the route is not less than 0. |
| 7 | (IMO, 2016) [20] | SIC, SIT | Polar Operational Limit Assessment Risk Indexing System (POLARIS) with the equation: | OW and PC6 vessels can safely navigate when the value along the route is not less than 0. |
| Metric Name | Formula | Optimum Value |
|---|---|---|
| TPR | 1 | |
| FPR | 1 | |
| F1-score | 1 | |
| MCC | 1 |
| Sampling Technique | Vessel Type | Model | TP | FN | FP | TN | TPR | FPR | F1-Score | nMCC |
|---|---|---|---|---|---|---|---|---|---|---|
| Under- sampling | PC6 | Model 1. | 889 | 4 | 848 | 45 | 0.9955 | 0.9496 | 0.6760 | 0.5703 |
| Model 2. | 760 | 133 | 10 | 883 | 0.8511 | 0.0112 | 0.9140 | 0.9240 | ||
| Model 6. ATAM | 889 | 4 | 850 | 43 | 0.9955 | 0.9518 | 0.6755 | 0.5682 | ||
| Model 7. POLARIS | 889 | 4 | 810 | 83 | 0.9955 | 0.9071 | 0.6860 | 0.6027 | ||
| OW | Model 1. | 813 | 80 | 44 | 849 | 0.9104 | 0.0493 | 0.9291 | 0.9309 | |
| Model 3. | 746 | 147 | 0 | 893 | 0.8354 | 0.0000 | 0.9103 | 0.9235 | ||
| Model 4. | 761 | 132 | 2 | 891 | 0.8522 | 0.0022 | 0.9191 | 0.9295 | ||
| Model 5. | 771 | 122 | 3 | 890 | 0.8634 | 0.0034 | 0.9250 | 0.9339 | ||
| Model 6. ATAM | 826 | 67 | 59 | 834 | 0.9250 | 0.0661 | 0.9291 | 0.9295 | ||
| Model 7. POLARIS | 826 | 67 | 52 | 841 | 0.9250 | 0.0582 | 0.9328 | 0.9334 | ||
| Over- sampling | PC6 | Model 1. | 6569 | 30 | 6362 | 237 | 0.9955 | 0.9641 | 0.6727 | 0.5557 |
| Model 2. | 5541 | 1058 | 93 | 6506 | 0.8397 | 0.0141 | 0.9059 | 0.9173 | ||
| Model 6. ATAM | 6569 | 30 | 6366 | 233 | 0.9955 | 0.9647 | 0.6726 | 0.5550 | ||
| Model 7. POLARIS | 6569 | 30 | 6070 | 529 | 0.9955 | 0.9198 | 0.6829 | 0.5939 | ||
| OW | Model 1. | 36,935 | 3484 | 1337 | 39,072 | 0.9138 | 0.0331 | 0.9387 | 0.9410 | |
| Model 3. | 33,616 | 6803 | 0 | 40,409 | 0.8317 | 0.0000 | 0.9081 | 0.9219 | ||
| Model 4. | 34,383 | 6036 | 61 | 40,348 | 0.8507 | 0.0015 | 0.9186 | 0.9293 | ||
| Model 5. | 34,560 | 5859 | 137 | 40,272 | 0.8550 | 0.0034 | 0.9202 | 0.9302 | ||
| Model 6. ATAM | 37,454 | 2965 | 2300 | 38,109 | 0.9266 | 0.0569 | 0.9343 | 0.9349 | ||
| Model 7. POLARIS | 37,468 | 2951 | 1967 | 38,442 | 0.9270 | 0.0487 | 0.9384 | 0.9393 |
| Sampling Technique | Model | TP | FN | FP | TN | TPR | FPR | F1-Score | nMCC |
|---|---|---|---|---|---|---|---|---|---|
| Under- sampling | ETC | 892 | 1 | 7 | 886 | 0.9989 | 0.0078 | 0.9955 | 0.9955 |
| RF | 892 | 1 | 6 | 887 | 0.9989 | 0.0067 | 0.9961 | 0.9961 | |
| XGBoost | 887 | 6 | 14 | 879 | 0.9933 | 0.0157 | 0.9888 | 0.9888 | |
| LightGBM | 891 | 2 | 17 | 876 | 0.9978 | 0.0190 | 0.9894 | 0.9894 | |
| CatBoost | 879 | 14 | 12 | 881 | 0.9843 | 0.0134 | 0.9854 | 0.9854 | |
| GBM | 886 | 7 | 9 | 884 | 0.9922 | 0.0101 | 0.9910 | 0.9910 | |
| KNN | 865 | 28 | 62 | 831 | 0.9686 | 0.0694 | 0.9496 | 0.9499 | |
| MLP | 812 | 81 | 24 | 869 | 0.9093 | 0.0269 | 0.9412 | 0.9421 | |
| LR | 772 | 121 | 28 | 865 | 0.8645 | 0.0314 | 0.9166 | 0.9189 | |
| SVC | 809 | 84 | 18 | 875 | 0.9059 | 0.0202 | 0.9429 | 0.9441 | |
| Over- sampling | ETC | 6596 | 3 | 46 | 6553 | 0.9995 | 0.0070 | 0.9963 | 0.9963 |
| RF | 6596 | 3 | 52 | 6547 | 0.9995 | 0.0079 | 0.9958 | 0.9958 | |
| XGBoost | 6559 | 40 | 111 | 6488 | 0.9939 | 0.0168 | 0.9886 | 0.9886 | |
| LightGBM | 6581 | 18 | 122 | 6477 | 0.9973 | 0.0185 | 0.9894 | 0.9895 | |
| CatBoost | 6515 | 84 | 75 | 6524 | 0.9873 | 0.0114 | 0.9880 | 0.9880 | |
| GBM | 6554 | 45 | 76 | 6523 | 0.9932 | 0.0115 | 0.9908 | 0.9908 | |
| KNN | 6411 | 188 | 491 | 6108 | 0.9715 | 0.0744 | 0.9486 | 0.9490 | |
| MLP | 5925 | 674 | 90 | 6509 | 0.8979 | 0.0136 | 0.9421 | 0.9439 | |
| LR | 5648 | 951 | 191 | 6408 | 0.8559 | 0.0289 | 0.9135 | 0.9162 | |
| SVC | 5905 | 694 | 52 | 6547 | 0.8948 | 0.0079 | 0.9435 | 0.9456 |
| Sampling Technique | Model | TP | FN | FP | TN | TPR | FPR | F1-Score | nMCC |
|---|---|---|---|---|---|---|---|---|---|
| Under- sampling | ETC | 856 | 37 | 10 | 883 | 0.9586 | 0.0112 | 0.9733 | 0.9739 |
| RF | 853 | 40 | 18 | 875 | 0.9552 | 0.0202 | 0.9671 | 0.9677 | |
| XGBoost | 824 | 69 | 7 | 886 | 0.9227 | 0.0078 | 0.9559 | 0.9586 | |
| LightGBM | 835 | 58 | 6 | 887 | 0.9351 | 0.0067 | 0.9631 | 0.9650 | |
| CatBoost | 826 | 67 | 8 | 885 | 0.9250 | 0.0090 | 0.9566 | 0.9590 | |
| GBM | 831 | 62 | 9 | 884 | 0.9306 | 0.0101 | 0.9590 | 0.9611 | |
| KNN | 811 | 82 | 14 | 879 | 0.9082 | 0.0157 | 0.9441 | 0.9475 | |
| MLP | 817 | 76 | 22 | 871 | 0.9149 | 0.0246 | 0.9434 | 0.9459 | |
| LR | 808 | 85 | 24 | 869 | 0.9048 | 0.0269 | 0.9368 | 0.9400 | |
| ETC | 809 | 84 | 22 | 871 | 0.9059 | 0.0246 | 0.9385 | 0.9417 | |
| Over- sampling | ETC | 38,561 | 1848 | 527 | 39,882 | 0.9543 | 0.0130 | 0.9701 | 0.9709 |
| RF | 38,602 | 1807 | 931 | 39,478 | 0.9553 | 0.0230 | 0.9658 | 0.9662 | |
| XGBoost | 37,429 | 2980 | 531 | 39,878 | 0.9263 | 0.0131 | 0.9552 | 0.9574 | |
| LightGBM | 38,012 | 2397 | 540 | 39,869 | 0.9407 | 0.0134 | 0.9628 | 0.9641 | |
| CatBoost | 37,388 | 3021 | 401 | 40,008 | 0.9252 | 0.0099 | 0.9562 | 0.9586 | |
| GBM | 37,666 | 2743 | 489 | 39,920 | 0.9321 | 0.0121 | 0.9589 | 0.9607 | |
| KNN | 36,794 | 3615 | 587 | 39,822 | 0.9105 | 0.0145 | 0.9460 | 0.9493 | |
| MLP | 37,065 | 3344 | 762 | 39,647 | 0.9172 | 0.0189 | 0.9475 | 0.9501 | |
| LR | 36,300 | 4109 | 937 | 39,472 | 0.8983 | 0.0232 | 0.9350 | 0.9389 | |
| ETC | 36,786 | 3623 | 349 | 40,060 | 0.9103 | 0.0086 | 0.9488 | 0.9523 |
| Vessel Type | Model | SIC Sensitivity | SIT Sensitivity | More Sensitive Feature |
|---|---|---|---|---|
| PC6 | ETC | 0.725 | 0.86 | SIT |
| RF | 0.64 | 0.79 | SIT | |
| XGBoost | 0.9937 | 0.98 | SIC | |
| LightGBM | 0.9969 | 0.9989 | SIT | |
| CatBoost | 0.2452 | 0.9795 | SIT | |
| GBM | 0.5097 | 0.8824 | SIT | |
| OW | ETC | 0.9889 | 0.955 | SIC |
| RF | 0.9835 | 0.915 | SIC | |
| XGBoost | 0.8887 | 0.9972 | SIT | |
| LightGBM | 0.8627 | 0.9997 | SIT | |
| CatBoost | 0.8972 | 0.9937 | SIT | |
| GBM | 0.9246 | 0.992 | SIT |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Li, G.; Zhu, J.; Cheng, X. Machine Learning-Based Binary Classification Models for Low Ice-Class Vessels Navigation Risk Assessment. J. Mar. Sci. Eng. 2025, 13, 1408. https://doi.org/10.3390/jmse13081408
Zhang Y, Li G, Zhu J, Cheng X. Machine Learning-Based Binary Classification Models for Low Ice-Class Vessels Navigation Risk Assessment. Journal of Marine Science and Engineering. 2025; 13(8):1408. https://doi.org/10.3390/jmse13081408
Chicago/Turabian StyleZhang, Yuanyuan, Guangyu Li, Jianfeng Zhu, and Xiao Cheng. 2025. "Machine Learning-Based Binary Classification Models for Low Ice-Class Vessels Navigation Risk Assessment" Journal of Marine Science and Engineering 13, no. 8: 1408. https://doi.org/10.3390/jmse13081408
APA StyleZhang, Y., Li, G., Zhu, J., & Cheng, X. (2025). Machine Learning-Based Binary Classification Models for Low Ice-Class Vessels Navigation Risk Assessment. Journal of Marine Science and Engineering, 13(8), 1408. https://doi.org/10.3390/jmse13081408