4.3.1. Ablation Experimental Analysis
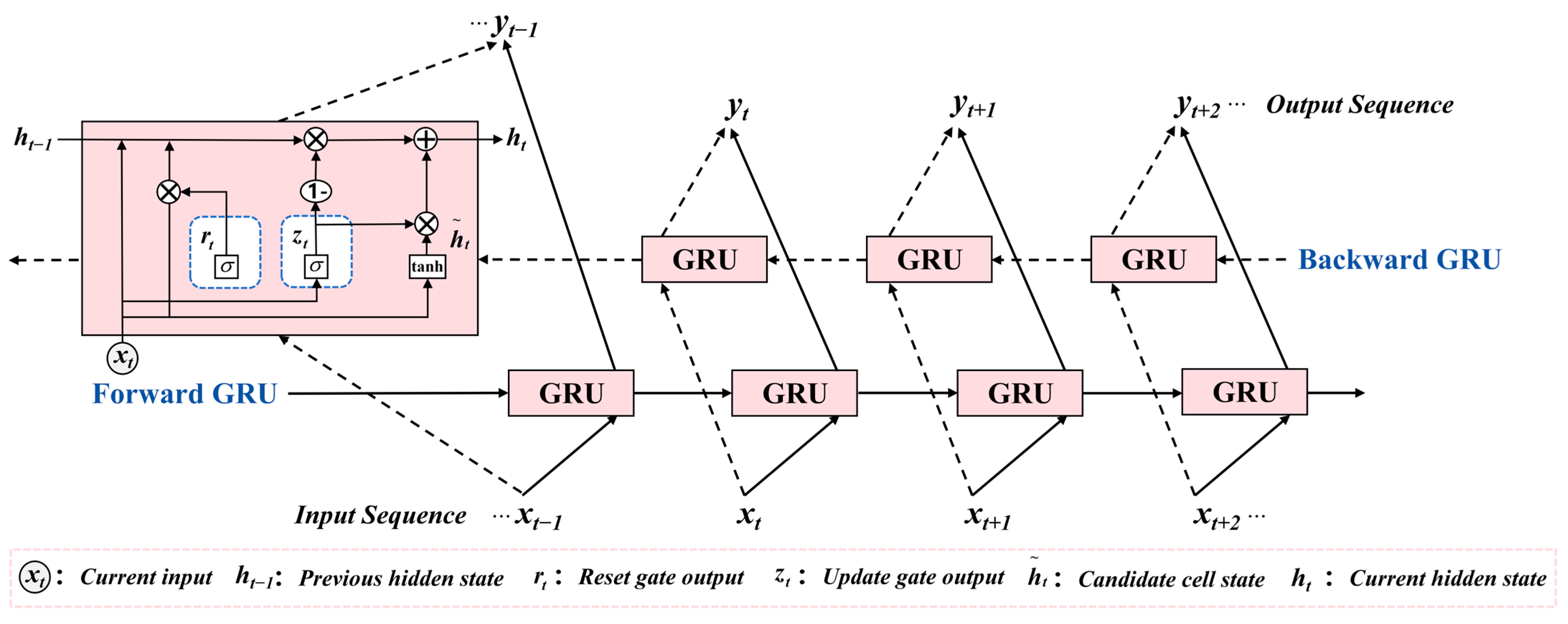
In addition to evaluating the designed baseline, this study also investigated other classical neural network architectures, including RNN, LSTM, GRU, BiLSTM, BiGRU, and Transformer, all of which are commonly applied in sequence prediction tasks due to their ability to capture temporal dependencies and contextual relationships.
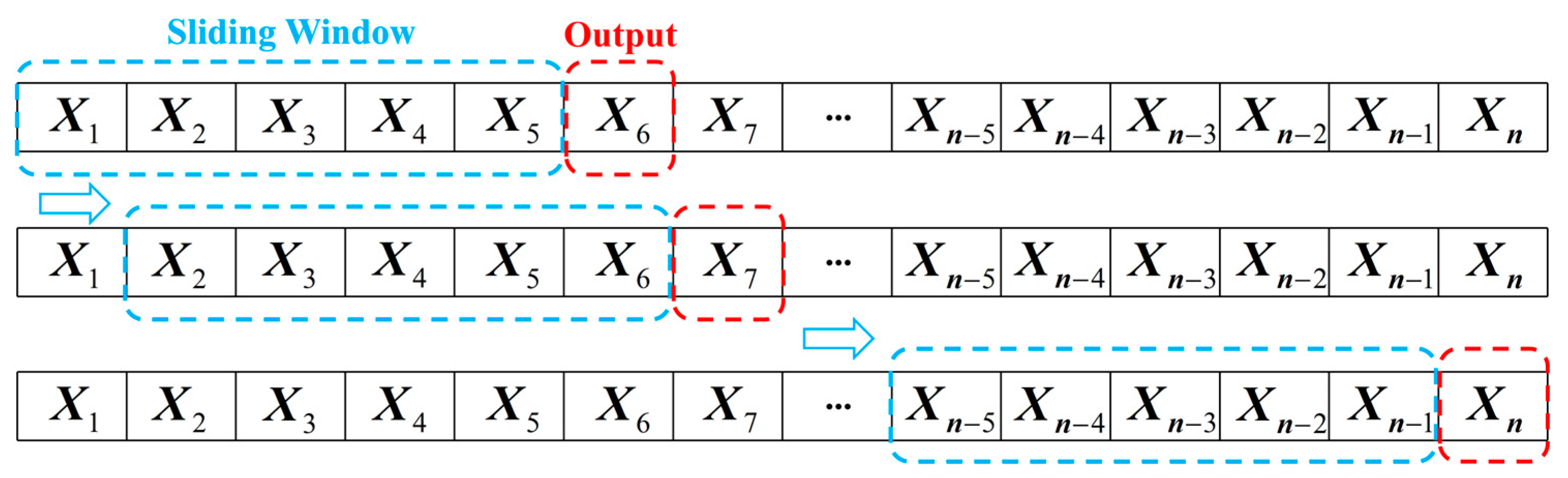
Each single-layer model was trained and tested on our dataset independently, with the main hyperparameter settings kept consistent. In the experiment, the initial 5 data nodes from each berthing sample served as models’ starting input, aiming to predict the berthing behavior for the next 60 nodes, which corresponds to approximately 6 min. MSE, MAE, ADE, and FDE were used as the evaluation metrics. The experimental results are shown in
Table 5; among the six single-layer models, BiGRU exhibited the highest predictive accuracy, with BiLSTM also yielding comparable results. The enhanced performance of these bidirectional architectures is primarily due to their ability to process temporal input sequences in both forward and backward directions, thereby enabling more robust extraction of contextual dependencies—an essential aspect in time series forecasting. In contrast, the standard RNN performed less favorably across all evaluation metrics, indicating its struggles with complex nonlinear time series data. Although Transformer-based models have achieved notable success in various domains, their performance was not particularly impressive in this study. This discrepancy may be attributed to the self-attention mechanism’s reliance on large-scale training data to effectively model long-range dependencies, a condition not satisfied by the relatively small size of the ship berthing dataset used in this work. Future research can further validate the potential of Transformer-based in ship BBP by expanding the size of our dataset.
Furthermore, an in-depth analysis of data in
Table 6, where ‘C’ indicates the inclusion of the CNN component for clarity, reveals that all evaluated models achieved varying degrees of improvement in prediction performance after integrating the CNN. Specifically, for the rates of improvement in four metrics, the highest was 19.84%, and the lowest was 6.75%. This improvement is due to the fact that CNN enhances the model’s ability to capture important local features, which is particularly effective when dealing with the sequence data. In this experiment, CNN performed convolution operations on the input berthing behavior data, enabling prediction models to identify local dynamic patterns that occur during berthing, such as acceleration, deceleration, and turning events. This allows subsequent sequence models to focus more effectively on learning long-term dependencies from the berthing behavior data. Hence, the integration of CNN and sequence models is tested as an effective modeling strategy for tasks involving complex dynamic processes, such as ship BBP.
To further evaluate the performance of the two best-performing bidirectional recurrent units under different configurations, an ablation study was designed and conducted.
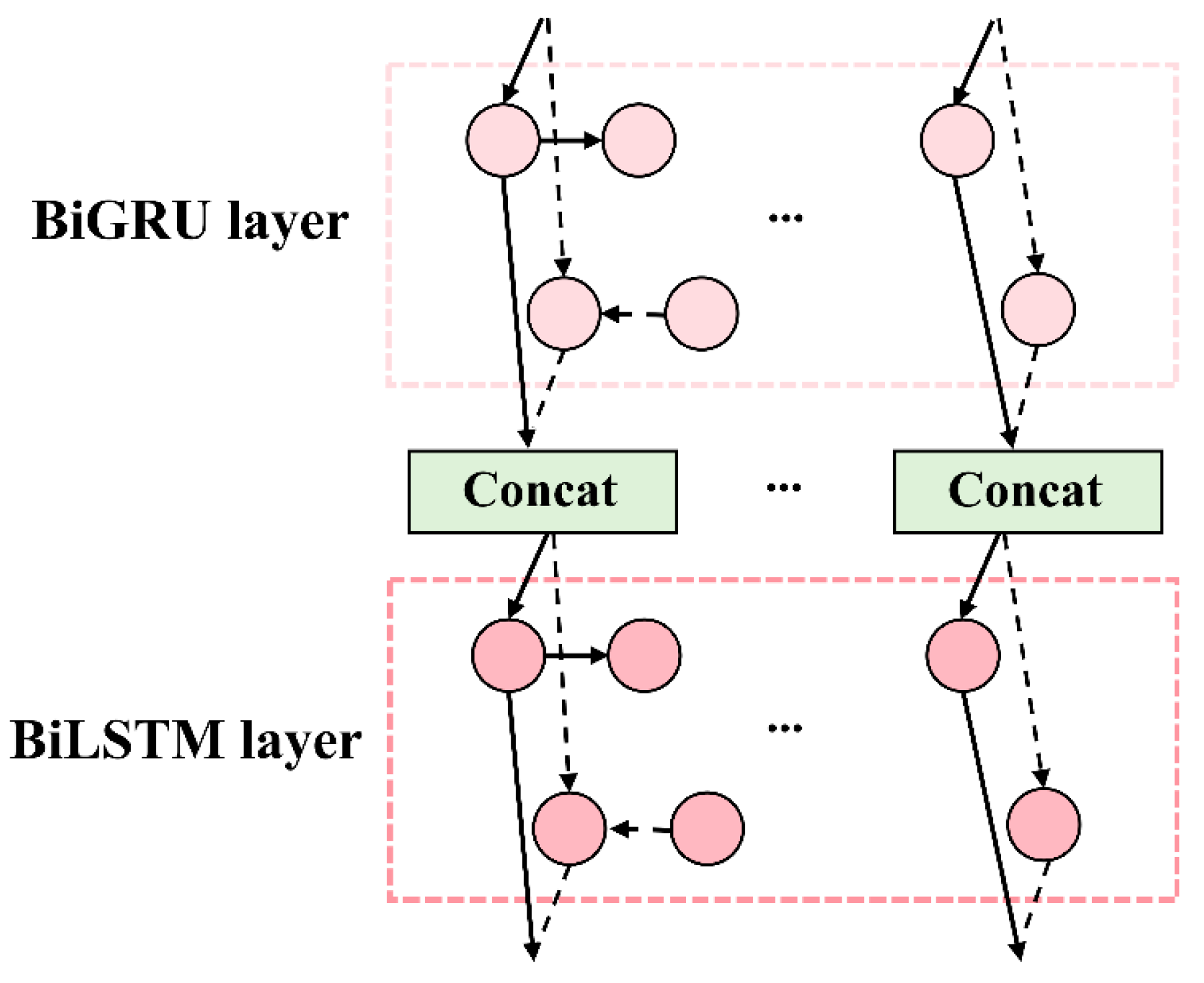
Table 7 provides a comprehensive comparison of predictive accuracy for four combinations, with the lowest error values highlighted in bold. The results demonstrate that each combination outperforms the best-performing single-layer method, BiGRU, indicating the enhanced modeling capacity achieved by integrating multiple bidirectional units. Among the tested combinations, the proposed baseline (i.e., CNN-BiGRU-BiLSTM) delivered the best performance across all evaluation metrics. Specifically, the baseline achieved average improvements of 23.56% in MSE, 13.75% in MAE, 11.73% in ADE, and 10.4% in FDE, relative to other combinations. This advantage is attributed to the fact that the BiGRU, with its relatively simple gating structure, can efficiently extract short-term dynamics at the initial stage, and the BiLSTM can further enhance the representation of long-term dependencies through its sophisticated memory units. Hence, the CNN-BiGRU-BiLSTM architecture is designed to serve as a strong baseline for our dataset, offering a robust foundation for the subsequent in-depth analysis and model optimization in the ship BBP task.
4.3.2. Visualization Research and Analysis
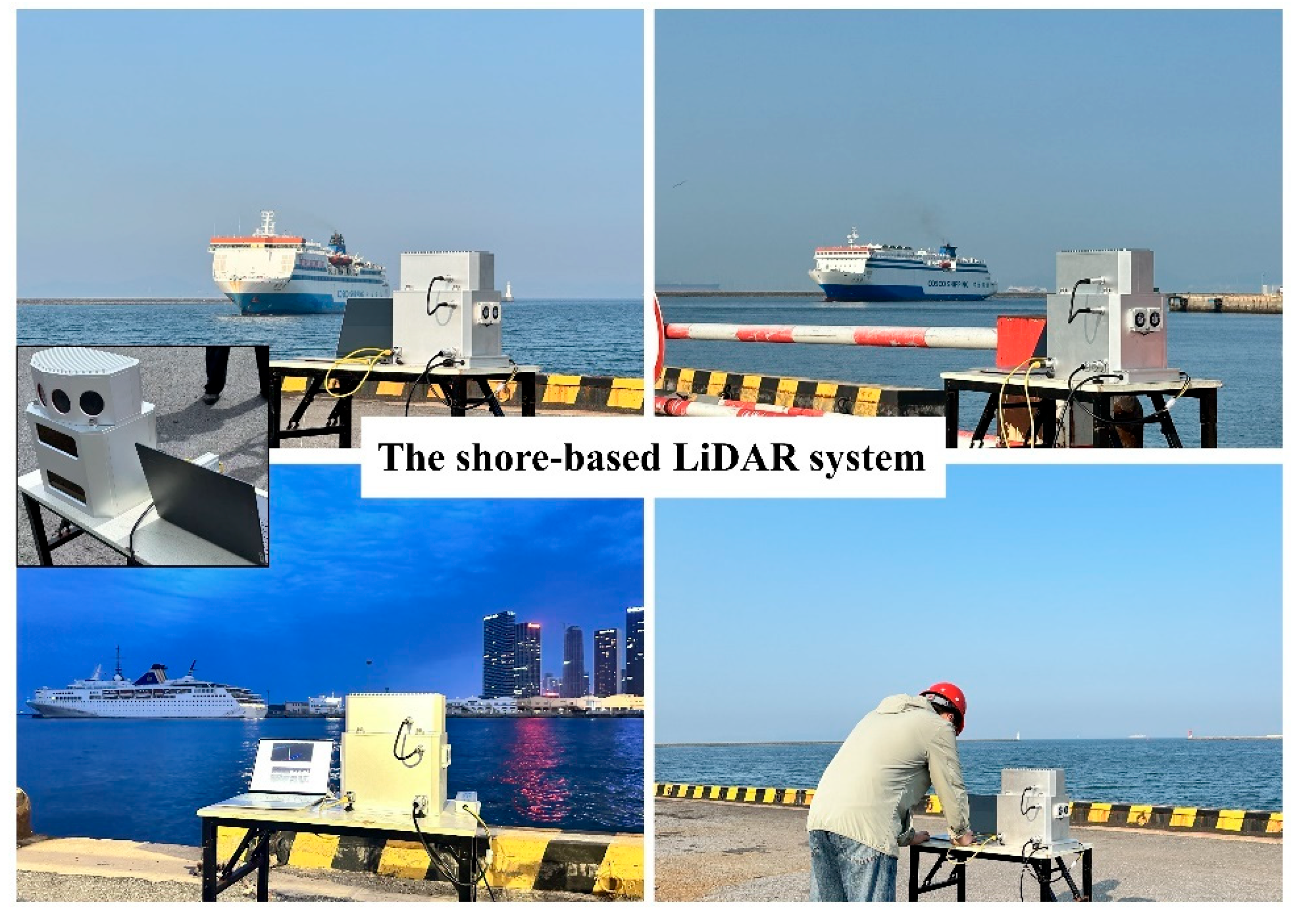
In the field of ship trajectory prediction, AIS data-driven methods are widely used to make long-term and large-scale prediction based on historical navigation information. A large volume of maritime data is generated by the AIS system, offering significant support for ship management and traffic control. However, details of these data are often insufficient to reflect the ship’s actual movement during berthing. Therefore, to intuitively illustrate these limitations and contrast AIS data with LiDAR data in recording ship berthing status, the berthing activity of the ship WanTongHai on 8 May 2025 was selected as a representative case study for comparative analysis. Specifically, point cloud data of the target ship’s berthing process, as shown in
Figure 12, was collected using the shore-based LiDAR system described in
Section 4.1. After preprocessing, the ship’s trajectory, angle, and speed information relative to the berth were extracted through our proposed algorithm, which has also been tested in real port environments. This information was used as the actual motion state for comparison. In parallel, AIS data corresponding to the same berthing event was recorded and processed, containing 15 timepoints. The starting point of the berthing trajectory was (38.9352°,121.6579°), which was also defined as time = 0 s.
Figure 13,
Figure 14 and
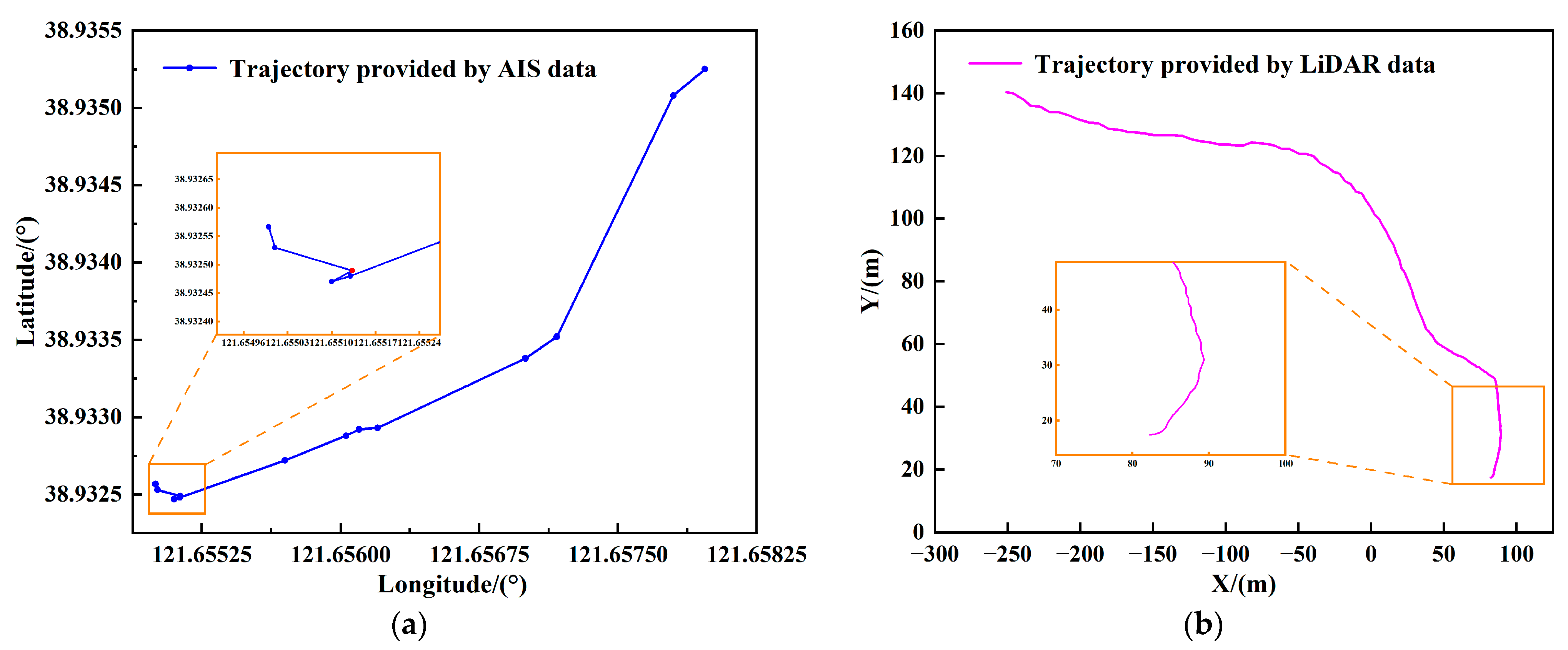
Figure 15 show the visualized results of trajectory, angle, and speed information during the target ship during berthing. It is worth noting that only the bow information provided by the LiDAR data is presented. From the perspective of the berthing trajectory, as depicted in
Figure 13a, the timepoints of AIS data were sparse, with an average sampling interval of 34.21 s, producing trajectories composed of linear segments. Such representation inadequately reflects the true, continuous movement pattern of the ship when berthing. Some studies typically handle AIS data by performing interpolation techniques. but this still fails to recover the subtle dynamic variations that occur during berthing. In contrast, LiDAR data, as shown in
Figure 13b, provided denser and more continuous trajectory information, effectively recording the entire berthing path and local trajectory changes. In this experiment, the ship WanTongHai transitioned to sternward motion in the final phase of berthing, enabling the ship to align and interface precisely with the port facilities. As shown in the orange box in
Figure 13, both datasets effectively reflected this berthing strategy. In addition, the AIS trajectory contained an outlier (marked in red), which could adversely affect subsequent model training and prediction, undermining the overall analysis’s accuracy.
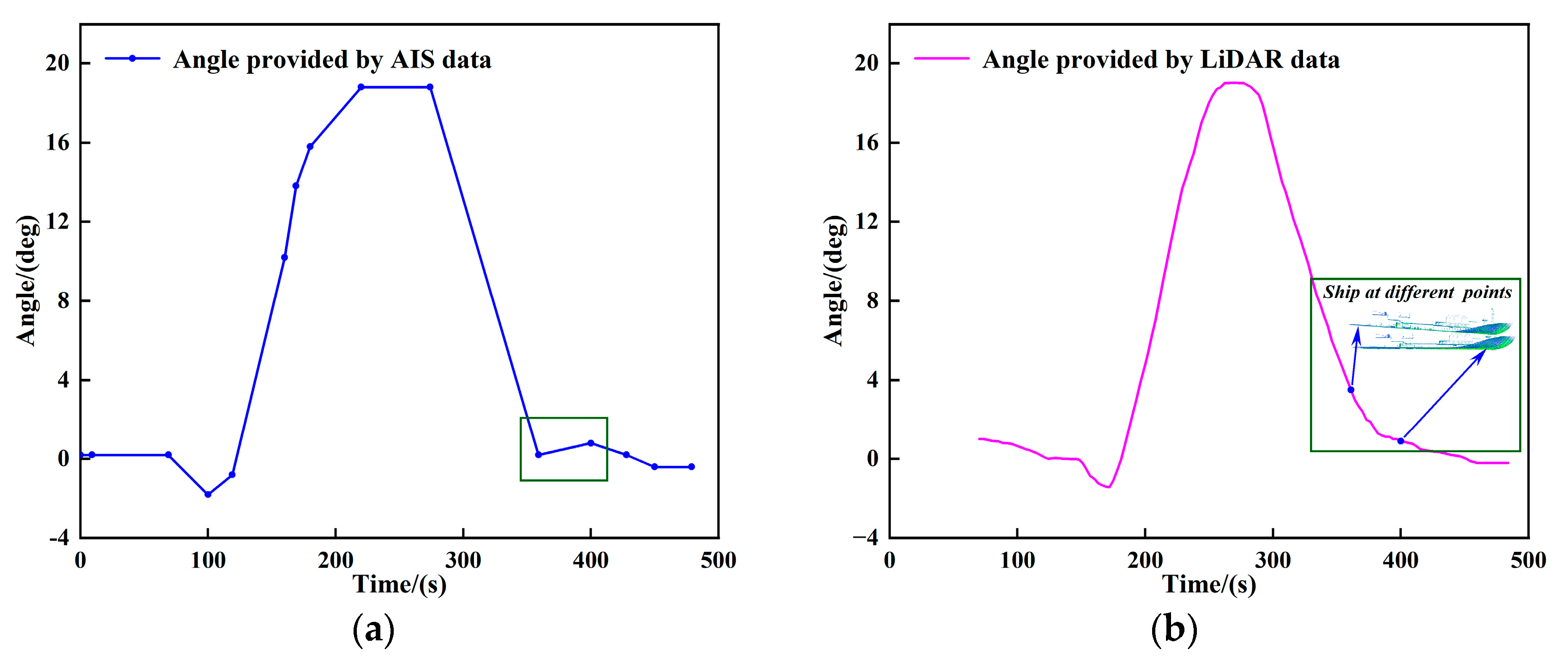
Figure 14 illustrates the time-varying curves of the berthing angle recorded by AIS and LiDAR data. Overall, both curves exhibited similar variation trends, reflecting the ship’s directional adjustments during berthing. However, there are some differences in the temporal evolution. For example, during the 359–400 s interval, as shown in green box in
Figure 14, the AIS data indicated an increasing angle trend—see
Figure 14a—whereas LiDAR data revealed that the angle was actually decreasing during the same period—see
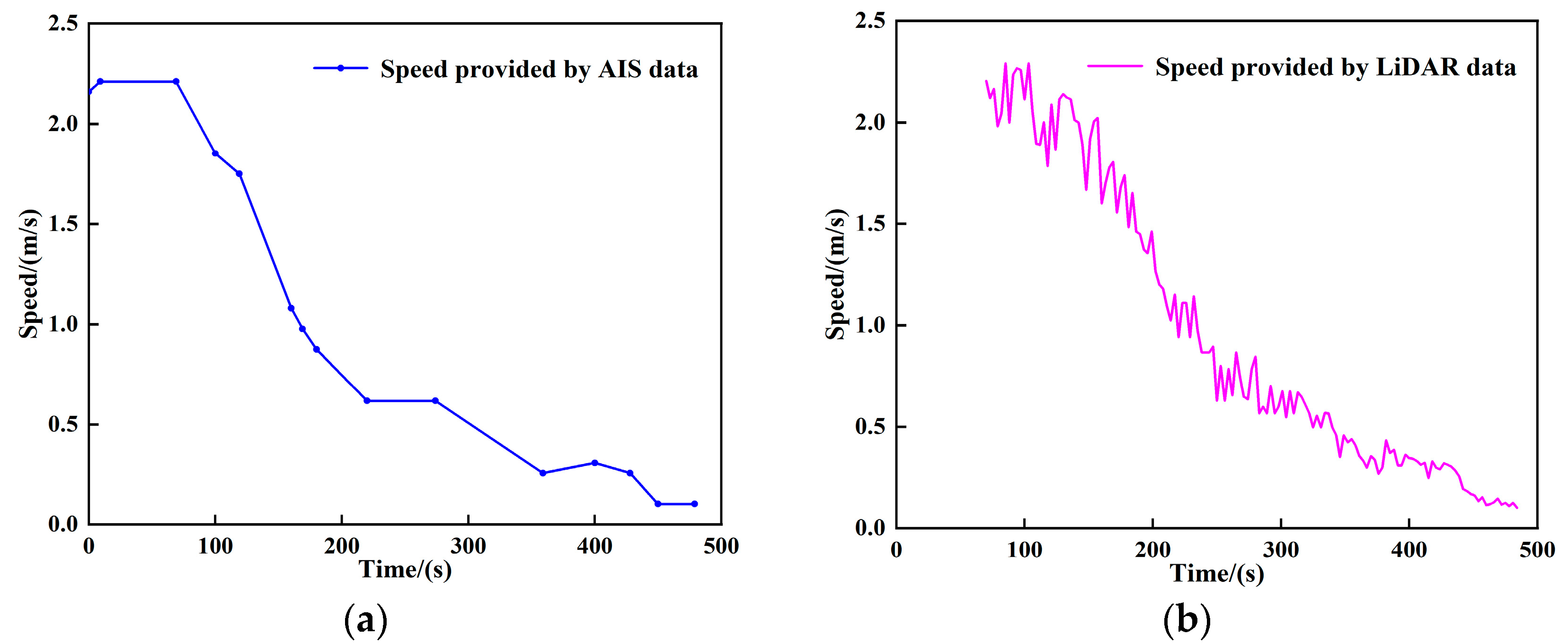
Figure 14b. In terms of the speed, AIS data smoothed out rapid adjustments in speed, as depicted in
Figure 15a, and failed to capture rapid fluctuations in the ship’s movement. In contrast, LiDAR data directly derived the speed by measuring the continuous displacement variations, as shown in
Figure 15b, thereby reflecting each instance of ship’s deceleration and acceleration.
Based on the above analysis, AIS data shows significant limitations in berthing scenarios that require high-precision, continuous monitoring, while LiDAR data provides a more accurate, comprehensive, and stable depiction of ship berthing behavior, providing a more solid foundation for prediction. Therefore, we can conclude that the proposed LiDAR data-driven method is both feasible and necessary to improve the accuracy and reliability of ship BBP.
Furthermore, the recorded AIS data typically simplifies the entire ship to a single point, whereas a large ship is a behemoth with a length of several hundred meters and a width of several tens of meters. Such a simplification is clearly inadequate to accurately describe the true dimensions of the behemoth and its complex motion status, especially during the berthing process, where the motion states of the bow and stern may change in distinctly different ways. LiDAR data can accurately reflect the spatial positions of various parts of the hull near the shore relative to the berth, helping solve the problem of real-time acquisition of the ship’s multi-point motion status. Therefore, the dataset constructed in this study introduces berthing information for the bow, midship, and stern, enabling the model to provide a more comprehensive prediction.
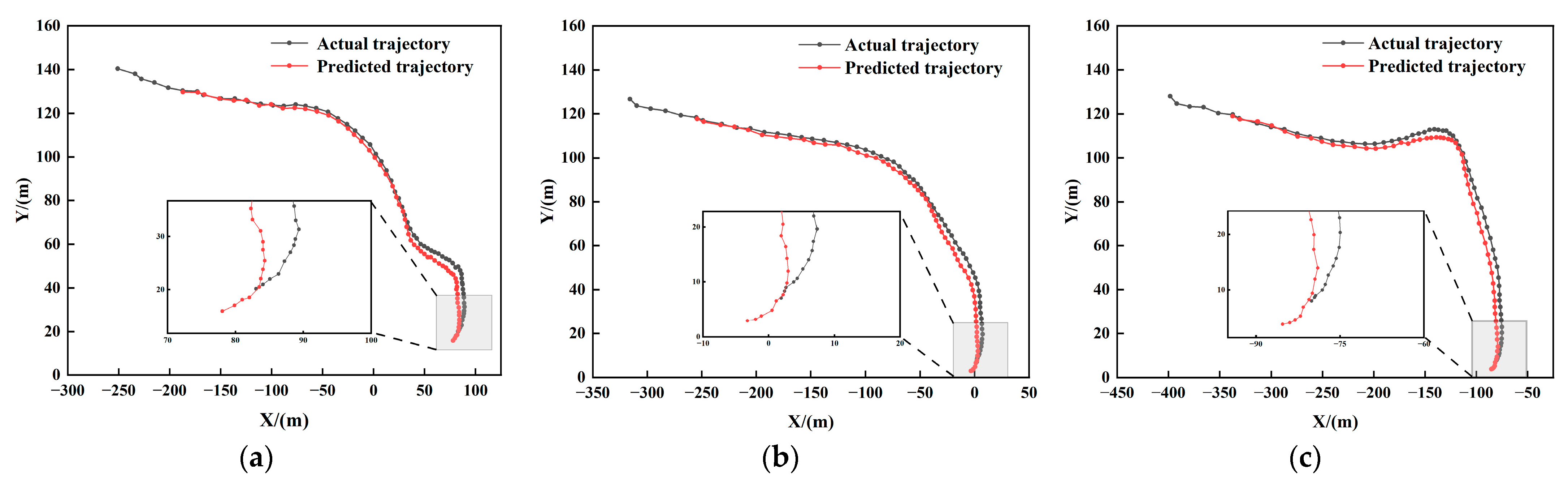
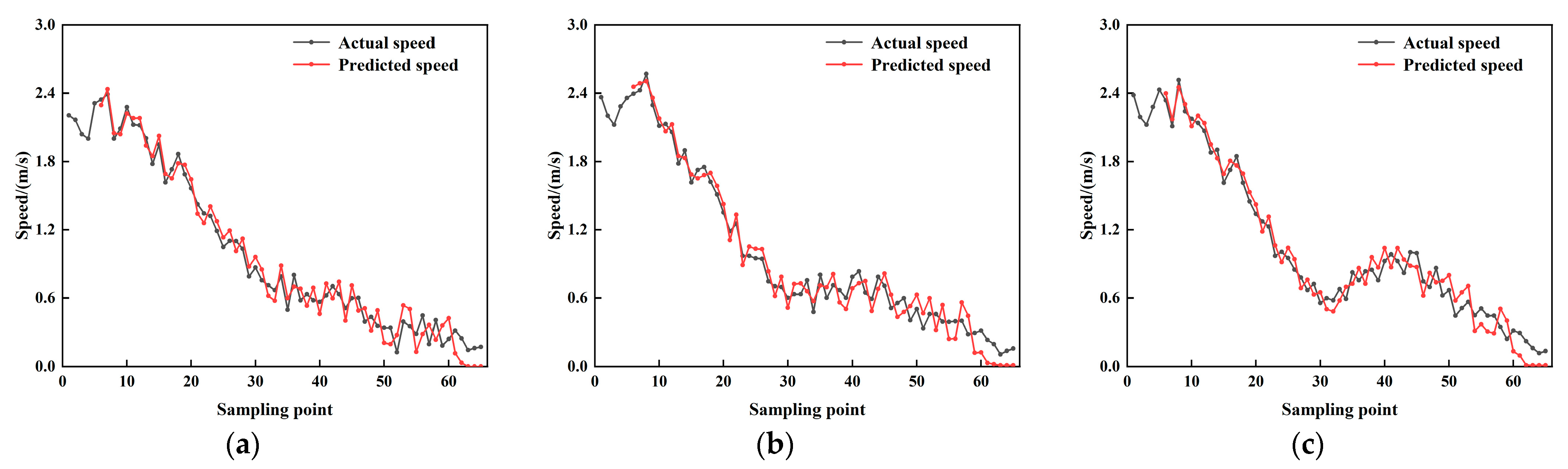
Figure 16 and
Figure 17 show a comparison between the motion trajectories and speeds at key structural points of the ship, including the bow, midship, and stern, as predicted by the LiDAR data-driven baseline and the true values. Specifically, as illustrated in
Figure 16, the trajectories predicted by the baseline exhibit a degree of spatial resemblance to the actual trajectories, accurately capturing the trajectory variation characteristics of each key point. Quantitatively, the average prediction errors at the bow, midship, and stern were 2.89 m, 2.91 m, and 3.03 m, respectively, while the terminal errors were 6.61 m, 6.57 m, and 6.74 m, respectively. For large ships, these errors remain within the acceptable range for practical berthing applications and can provide valuable references for berthing decision-making, path planning, and early warning. However, for scenarios such as autonomous berthing and precise positioning, further research is needed to reduce these errors. The non-stationary fluctuations in speed during the berthing process impose higher demands on the model’s predictive capability. Despite this, as shown in
Figure 17, the speed prediction performance of the baseline remains relatively robust. The maximum absolute errors for predicted speeds at the bow, midship, and stern were 0.212 m/s, 0.199 m/s, and 0.207 m/s, respectively, indicating a high overall prediction accuracy. It must be noted, however, that the model did not always accurately respond to every acceleration or deceleration event. For example, in nodes when the ship suddenly decelerated, the model temporarily continued to predict an acceleration trend, leading to localized prediction deviations. Despite these occasional deviations, the overall accuracy achieved in multi-point speed prediction can still serve as an important reference.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}